상륙돌격장갑차의 진수 중 동적 거동 수치 해석
Numerical Analysis on Dynamic Behavior Characteristics of an Amphibious Assault Vehicle during Water Entry
Article information
Trans Abstract
In the present study, the dynamic behavior characteristics of an amphibious assault vehicle during water entry were analyzed using STAR-CCM+, a commercial computational fluid dynamics(CFD) code. All computations were performed using an overset mesh system and a RANS based flow-solver coupled with dynamic fluid-body interaction(DFBI) solver for simulating three degrees of freedom motion. For numerical validation of the solver, a water entry simulation of inclined circular cylinder was conducted and it was compared between an existing experiment data and CFD results. The pitch angle variation and the trajectory of the circular cylinder during water entry shows good agreement with previous experimental and numerical studies. For the water entry simulations of the amphibious assault vehicle, the analysis of dynamic behaviors of the amphibious assault vehicle with different slope angles, submerged depths and initial velocities were conducted. It is confirmed that the steep slope angle increases the submerged volume of the amphibious assault vehicle, so the buoyancy acting on the vehicle is increased and the moved distance for the re-flotation is decreased. It is also revealed that the submerged volume is increased, bow-up phenomenon occur earlier.
1. 서론 및 문제 정의
1.1 서론
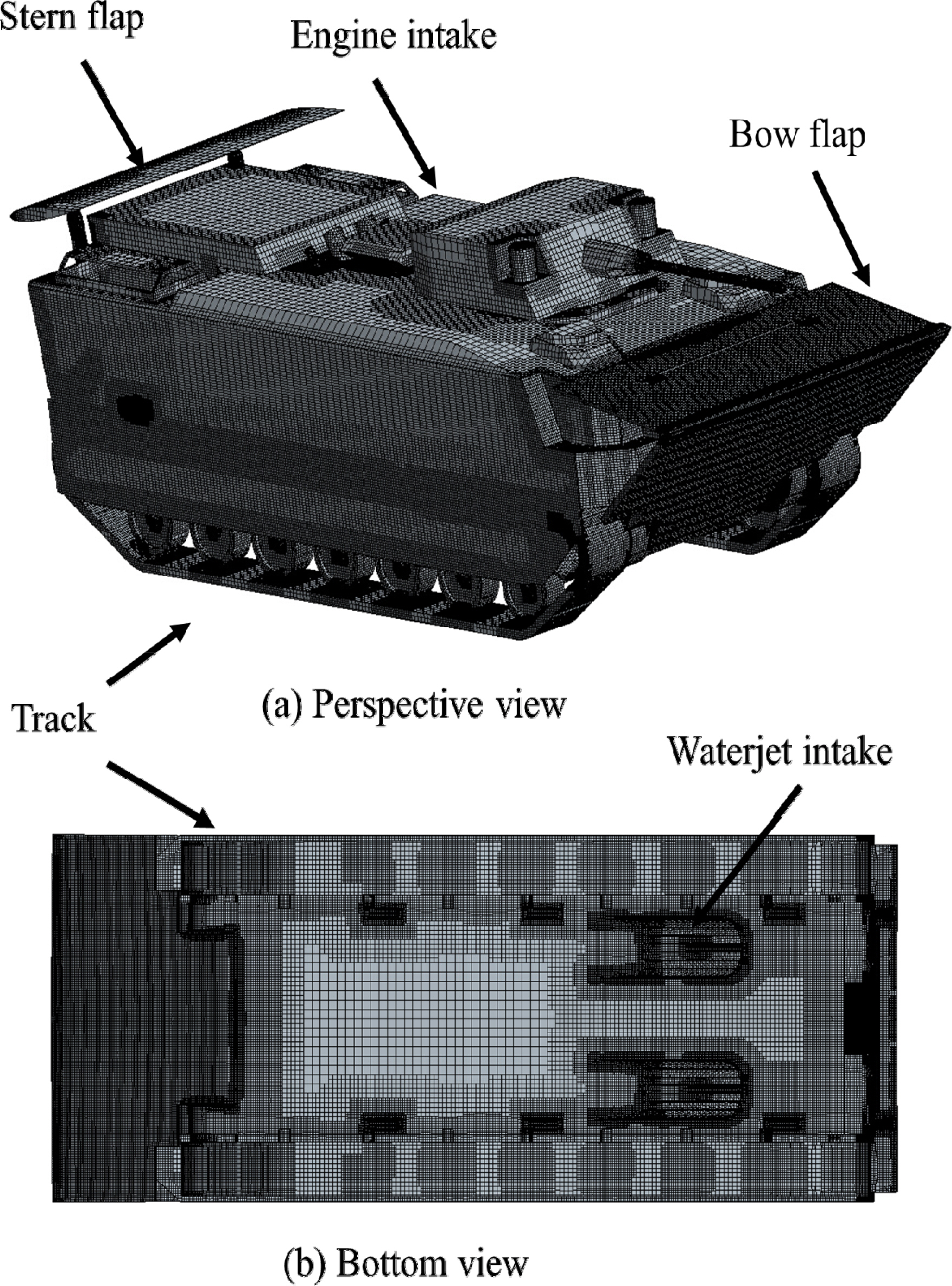
기존 육상에서 궤도로 운용되는 장갑차와 달리, 육상 및 해상에서 운용되는 특징을 가지고 있는 상륙돌격장갑차는 해군 상륙함에 탑재되며 상륙함의 함미 램프를 통해 해상 진수하여 상륙작전을 수행한다. 이후 수상운행장치를 전개하여 체계 형상을 변환하고, 별도의 수상 추진장치인 워터제트 추진시스템(waterjet propulsion system)으로 추진력을 발생시켜 고속 해상 기동을 실시한다[1].
진수 중 발생하는 상륙돌격장갑차의 동적 거동 특성에 따라 장갑차의 동적 안정성에 직결되기 때문에 진수 해석에 대한 분석은 세심하게 수행되어야 하지만 무기체계 개발사업의 특성상 공개된 자료가 많지 않고 진수 시 발생하는 동적 거동 분석에 관한 연구는 대부분 장갑차와 같은 복잡한 형상이 아닌 비교적 단순한 형상에 대해 수행되었다. 진수 시험과 관련해서 Worthington 등[2,3]은 단일 카메라를 활용하여 수직으로 진수하는 강체 구 형상에 대한 공동(cavity) 형성과정에 미치는 요인을 분석하였다. Wei 등[4]은 경사각이 변화하는 조건에서 원기둥에 대한 3차원 진수 시험을 수행하였으며, 원기둥의 동적 거동 및 진수 시 발생하는 공동 형성과정을 분석하였다.
한편, 2000년대 들어 컴퓨터의 계산 처리 속도 증가 및 대용량 계산을 위한 병렬 프로그래밍에 대한 활용성이 높아짐에 따라 전산유체역학을 이용하여 진수 중 물체의 동적 거동 특성 및 공동 형성과정을 분석하는 것이 가능해졌다. Wang 등[5]은 수직으로 입수하는 물체에 작용하는 비정상 유체력을 분석하였으며, 물체의 속도 및 가속도에 따른 각각의 힘 구성요소를 나타내는 물리적 모델을 제안하였다. 최근에는 계산 자원의 발전에 힘입어 난류 모델링을 사용하는 RANS (Reynolds Averaged Navier-Stokes) 방정식을 활용하여 진수 해석을 수행한 연구들이 존재한다. Kintea 등[6]은 진수 각의 변화에 따라 회전하는 구형 물체의 진수 해석 문제를 VOF(Volume of Fraction) 기법[7]을 사용하여 수치적으로 계산하였다. Liu 등[8]은 3차원 6자유도 운동 수치 모델을 활용하여 초기 속도에 및 경사각 따른 원기둥의 동적 거동 및 공동 형성 과정을 분석하였으며 Wei 등[4]의 실험 결과와 비교하여 해석자의 타당성을 입증하였다. 비교적 복잡한 형상의 진수 문제와 관련해서 Burciu 등[9]은 실험 및 전산 해석을 통해 수륙양용차량의 진수 시 최대 종동요 및 상부 구조물의 해수 유입 관점에서 분석하였으며 수륙양용차량의 안전한 진수를 위한 경사각을 제시하였다. 하지만, 해당 연구에서는 실험 결과 및 유사한 문제에 대한 동적 거동의 결과와 기존 결과간의 비교를 통한 수치 해석자의 신뢰성에 대한 검증 작업이 이루어지지 않았으며 사용한 격자에 대한 불확실성에 대한 정량적 분석이 이루어지지 않았다.
본 연구에서는 수상함의 함미 램프의 경사도 및 차체 초기 속도의 변화에 따른 상륙돌격장갑차의 동적 거동 특성을 분석하기 위해 상용 전산유체역학 코드인 STAR-CCM+ 버전 16.04를 이용하여 해석을 진행하였다. 본 해석에 앞서 수치 해석자의 타당성을 검증하기 위해 경사각이 존재하는 원통형 물체의 진수 문제에 대해 Wei 등[4]의 실험 결과 및 Liu 등[8]의 전산유체역학 결과와 비교하였다. 또한, 격자 밀집도에 의한 수치 해의 오차를 정량적으로 평가하기 위해 미국기계학회(American Standard Mechanical Engineering, ASME) 및 국제수조회의(International Towing Tank Conference, ITTC)에서 제시하는 절차를 통해 GCI[10] (Grid Convergence Index)를 도출하여 진수 해석을 위한 적절한 격자 시스템을 선정하였다. 선정한 격자 시스템을 활용하여 진수 해석을 위해 경사도 조건 11°와 16°에 대해 진수 해석을 진행하였으며 차체 초기 속도를 4 km/h, 8 km/h, 12 km/h로 설정하여 경사도 및 차체 속도에 따른 상륙돌격장갑차의 동적 거동 특성을 평가하였다.
1.2 문제 정의
상륙돌격장갑차는 Fig. 1과 같이 진수 중 장갑차 차체에 작용하는 중력과 부력에 의해 동적 거동이 발생하게 된다. 진수가 진행됨에 따라 장갑차 차체의 침수 체적이 증가하게 되어 부력의 증가함으로 인해 경사로와 접촉하는 차체 궤도 끝단을 기준으로 차체 앞부분이 부상하는 선수 들림(bow-up) 현상이 발생한다. 선수 들림 현상이 발생한 이후 경사로와 접촉하는 궤도 끝단에서 장갑차에 작용하는 자중에 의한 모멘트와 부력에 의한 모멘트의 합력이 0일 때 장갑차는 부양하며 진수 시 장갑차의 자유물체도는 식 (1)과 같다.
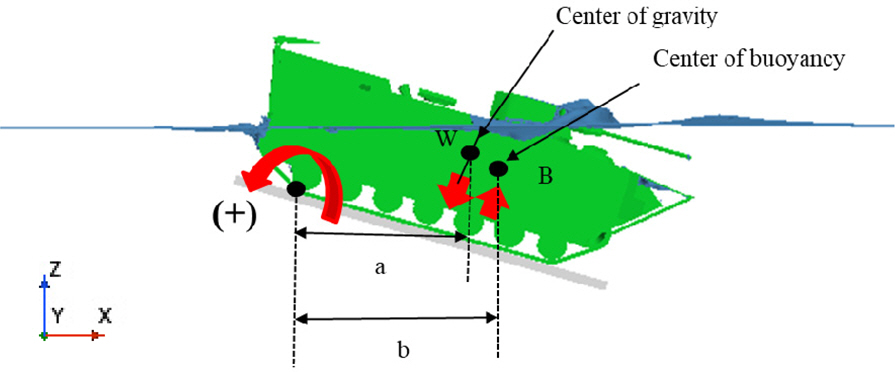
Free-body diagram of gravity and buoyancy force acting on amphibious assault vehicle
위 식에서 M과 Mf는 각각 장갑차에 작용하는 총 모멘트 합과 유체력에 기인한 모멘트를 의미한다. W와 B는 각각 장갑차의 자중과 장갑차에 작용하는 부력을 의미한다. a와 b는 각각 경사로에 접촉하는 궤도 끝단에서 무게중심 및 부력중심까지의 길이방향 거리이다.
2. 계산 방법
2.1 지배방정식 및 난류 모델링
본 연구에서는 자유수면 및 물체 주위의 전산 해석을 위해 연속방정식과 Navier-Stokes 방정식을 지배방정식으로 사용하였으며 아래와 같다.
위 식에서
Navier-Stokes 방정식을 풀기 위해서는 직접 수치적으로 모사하는 DNS(Direct Numerical Simulation) 방식과 부분적으로 모사하는 LES(Large Eddy Simulation)와 같은 수치 해석적 방법이 존재하지만, 해석을 위한 과도한 격자수가 필요하여 높은 계산 비용이 발생하는 단점이 있다. 반면, Navier-Stokes 방정식의 시간 평균화한 RANS 방정식을 활용한 계산은 계산 비용이 비교적 적고, 정도 높은 결과를 제공하여 본 연구에서는 RANS 방정식을 활용하였다. 진수 중 물체 유입 시 수상운행장치의 형상 특성으로 인한 형상 저항이 매우 크게 발생하기 때문에 난류 모델링으로 해당 해석에 적합한 k-w SST(Sear Stress Transport) 난류 모델을 사용하였다. 난류 모델을 활용하기 위해 차체에서 떨어진 첫 번째 격자점의 무차원화 수직 거리를 50 < y+ < 250 구간으로 설정하여 난류 경계층의 로그 법칙(logarithmic law)을 만족하는 구간 내에 있도록 하였다. 속도-압력 연성 해석은 분리(segregated)하여 계산하는 SIMPLE(Semi-Implicit Method for Pressure Linked Equation) 알고리즘[11]을 기반으로 하였다.
진수 중 동적 거동 문제를 수치 해석적으로 풀기 위해서는 자유수면에 대한 모델링이 필요하며 VOF기법[7]을 사용하였다. 공기-유체 이상(two-phase) 유동 문제의 경우, 액체의 부피분율 al와 공기의 부피분율 aa는 아래와 같은 상관관계가 있다.
액체의 부피분율이 0이고 공기의 부피분율이 1이라면 격자 내에 공기로 가득 찬 것을 의미한다. 액체의 부피분율이 0과 1사이 값이면 격자 내에 공기 및 액체가 존재하는 것을 의미하며 이는 자유수면에 대응한다.
2.2 물체 운동 해석 기법
본 연구에서는 진수 시 발생하는 물체의 동적 거동을 정도 높게 포착하기 위해 중첩 격자(overset mesh) 기법을 활용하였다. 전체 유동장을 배경 격자 영역과 물체 주위 영역을 중첩 격자 영역으로 구분하였다. 물체의 동적 거동 해석에 대해서는 STAR-CCM+에서 제공하는 유체-물체 상호작용(Dynamic Fluid Body Interaction, DFBI) 기법을 적용하여 장갑차의 동적 거동을 수치 해석적으로 분석하였다. DFBI 기법은 운동 방정식을 풀어 물체에 작용하는 유체력, 중력 등으로 인해 발생하는 다 자유도 운동을 구현하며 다양한 분야에서 활용되고 있다. 경사로와 차체 궤도의 접촉 조건은 DFBI 기법에서 물체 제약(body constraint) 조건을 설정하여 구현하였다. 물체 제약 조건의 경우 경사면 부분에 대한 격자를 생성하지 않고 경사면에 대한 수직 및 수평 방향 벡터와 경사로가 종료되는 끝단의 좌표를 이용하여 경사로를 구현하는 방식이기 때문에 경사로에 의해 발생할 수 있는 유동 간섭 영향은 무시하였다. 접촉 방법은 Half-plane 방식을 활용하였으며 접촉 허용오차는 0.001 m로 설정하였다. 해석 대상으로 사용된 장갑차는 좌우 대칭 형상으로 계산 비용을 절감하기 위해 반폭에 대해서 해석을 진행하였으며 6자유도 운동 중 전후동요, 상하동요 및 종동요에 대한 3자유도 운동에 대해 계산을 수행하였다. STAR-CCM+ 상에서 무게중심의 경우 체계 개발 시 설계값을 입력해 주었다. 부력중심의 경우 진수 중 체적 중심이 시간에 따라 변화하는 값이며 이를 단위 시간 간격으로 계산하여 장갑차의 동적 거동을 구현하였다. 장갑차의 무게중심, 중량 및 관성 모멘트의 설계값은 무기체계의 개발 특성상 공개가 어렵다. 장갑차의 운동 해석을 위해 이용한 운동 방정식은 아래 식 (5)-(8)과 같다.
위 식에서 F는 장갑차에 작용하는 힘을 의미하며 I와
2.3 계산 영역 및 해석 조건
2.3.1 원통형 물체의 진수 문제
본 연구에서는 장갑차의 진수 문제에 앞서 해석자의 타당성을 검증하기 위해 경사각이 존재하는 원통형 물체의 진수 중 동적 거동 분석을 위해 수치 해석을 수행하였다. 원통형 물체의 직경, 길이 및 밀도는 각각 D = 0.2 m, L = 0.05 m, ρ = 900 kg/m3이며, 원통형 물체의 경사각 및 초기 입수 속도는 각각 α = 78.4°, u0 = 6.1 m/s이다.
원통형 물체의 진수 중 동적 거동 분석을 위한 계산 영역과 경계 조건을 각각 Fig. 2와 Table 1에 나타내었으며, Liu 등[8]의 계산 영역 및 해석 조건과 동일하게 설정하였다.
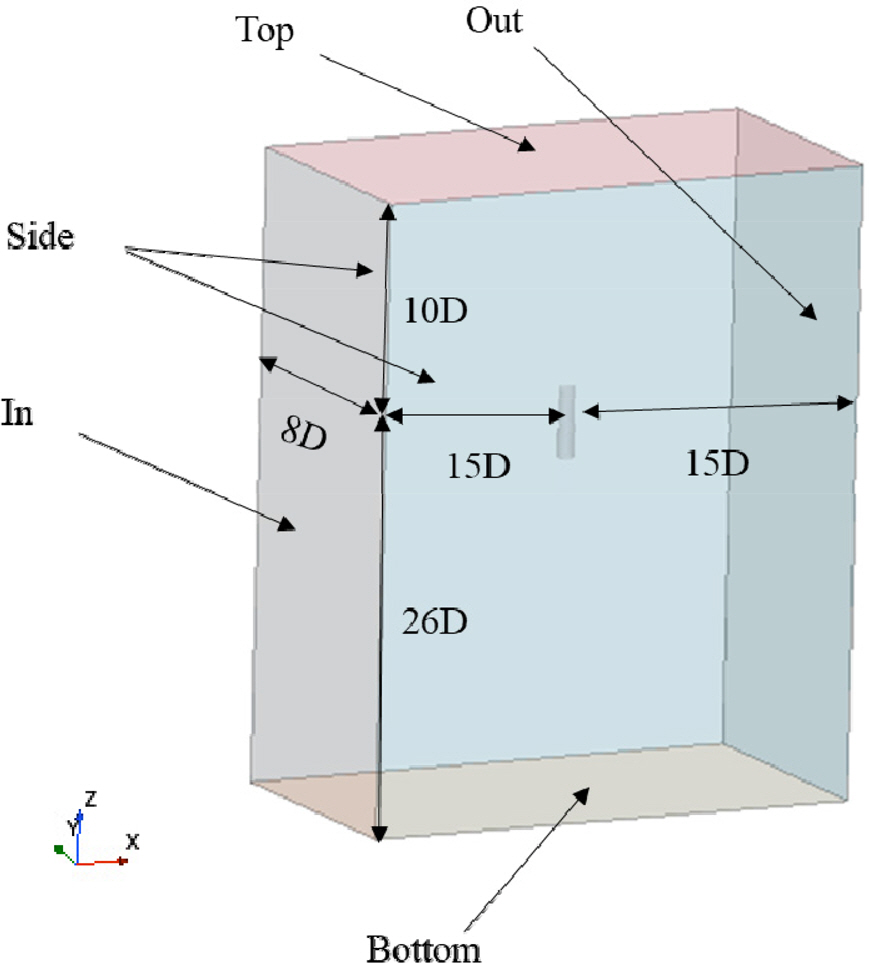
Computation domain of water entry problem for an inclined cylinder

Boundary conditions for an inclined cylinder water entry problem
2.3.2 장갑차의 진수 문제
장갑차의 진수 문제에 대한 계산 영역과 경계조건을 Fig. 4와 Table 2에 나타내었다. 상륙함에서 진입 가능한 최소 높이 및 상륙함 함미 램프의 운용 각도를 고려하여 경사도 조건을 11°와 16°로 설정하였으며, 실제 운용하는 설계 속도를 참고하여 장갑차의 초기 속도 조건을 4 km/h, 8 km/h, 12 km/h로 설정하였다. 계산 비용의 증가 문제와 진수 초기의 임펠러 회전 및 궤도 운동에 따른 장갑차의 동적 거동의 영향이 크지 않을 것으로 판단하였기 때문에 장갑차 워터제트 추진시스템에 대한 임펠러의 회전 및 궤도 운동을 구현하지 않았다. 해석 초기조건은 Fig. 3과 같이 물체 좌표계 상 무게중심점의 X’ 방향 좌표가 경사로 최전방 X’ 방향 좌표와 일치하는 위치로 설정하였다. 경사로는 정지해있는 구조로 실제 수치 해석상에서는 자유수면 이후 영역까지 경사로가 존재하게 되지만, 상륙함의 제원 및 실제 진수 상황을 고려하여 직관적 이해를 돕기 위해 상륙함 램프의 길이로 경사로 형상을 가시화하였다. 이전 언급했던 바와 같이 경사로에 의한 유동 간섭에 대한 영향은 무시하였다.

Computation domain of water entry problem for the amphibious assault vehicle

Boundary conditions water entry problem for the amphibious assault vehicle
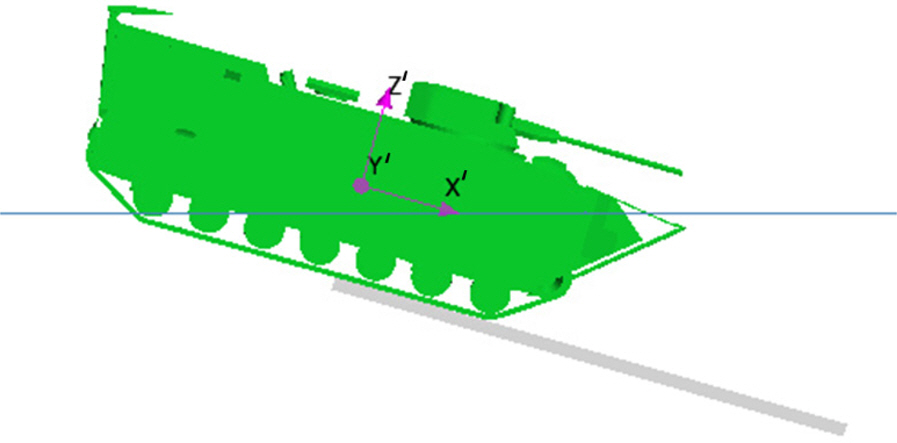
Initial position of amphibious assault vehicle for water entry simulation
3. 수치 해석 결과
3.1 원통형 물체의 진수 문제 해석 결과
본 연구에서는 해석자의 수치 해석적 타당성을 검증하기 위해 경사각이 존재하는 원통형 물체의 진수 중 동적 거동 분석을 수행하였다. Fig. 5에는 공동 형상(cavity shape)의 발달 과정을 Wei 등[4]의 실험 결과와 Liu 등[8]의 전산유체역학 결과와 비교하였다. 원통형 물체가 물속으로 진수함에 따라 수면과 물체의 접촉 이후 공동 형상이 발달되며 이후 물체 끝단의 먼저 진입한 위치에서 물체와 공동 형상이 분리(pinch-off)되고 나중에 진입한 위치에서의 공동 형상이 순차적으로 물체와 완전히 분리되어 공동은 닫히게 된다. 이와 같은 현상이 본 연구의 해석 결과에서 나타나는 것을 확인하였으며 기존 실험 및 전산유체역학 결과와 유사한 형태로 공동 형상이 발달하는 것을 확인하였다.
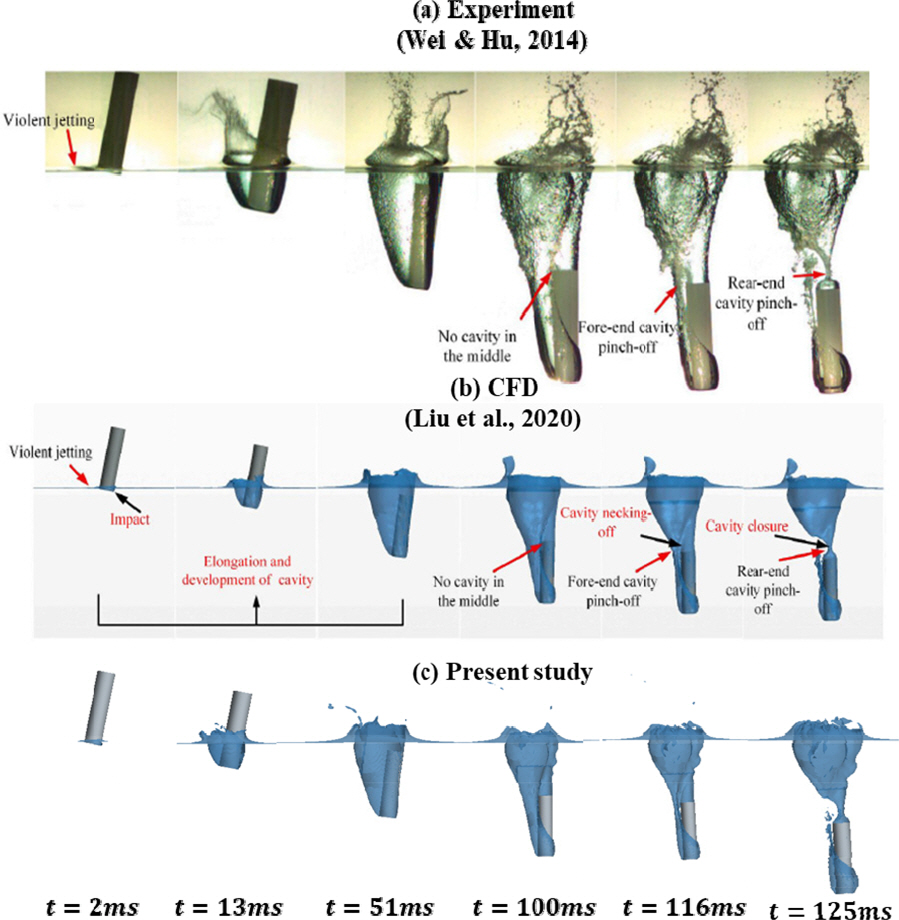
Comparison of the cavity shape for (a) experimental results (b) CFD results (c) present CFD results
또한, 원통형 물체의 동적 거동을 정량적으로 분석하기 위해 Fig. 6–8과 같이 원통형 물체 무게중심점의 궤적과 진행 시간에 따른 수직 및 수평 속도, 종동요각 결과를 기존 실험 및 전산유체역학 해석 결과와 비교하였다. Fig. 6 및 Fig. 8에서 진수가 진행함에 따라 후반부에서 시험 결과와 다소 상이한 결과가 도출되었는데, 이는 시험 및 전산유체역학 해석간 원통형 물체의 조도 차이 및 물체가 진수함에 따라 실제 공동의 세부적인 형상을 RANS 방정식의 난류 모델링을 통해 구현하는데 제한됨으로 인한 영향으로 판단된다. 또한, Fig. 8에서의 기존 전산유체역학 해석 결과와의 차이는 격자 구성 및 해석을 수행하기 위해 선정한 y+ 값의 차이로 인한 영향으로 판단된다. 기존 실험 및 전산유체역학 해석 결과와 비교를 통해 본 연구의 원통형 물체의 진수 문제 해석 결과가 대체적으로 기존 결과와 유사한 경향을 보이는 것을 확인하였으며 수치 해석자의 타당성을 검증하였다.

Comparison of the cylinder trajectory between experimental data and present results
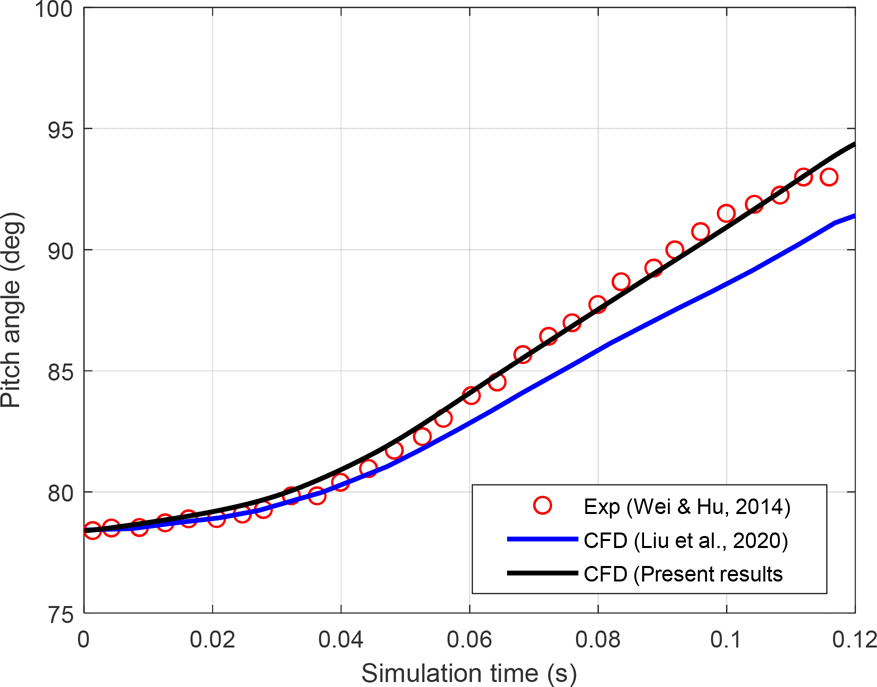
Comparison of the pitch angle of cylinder with experimental data, numerical and present results
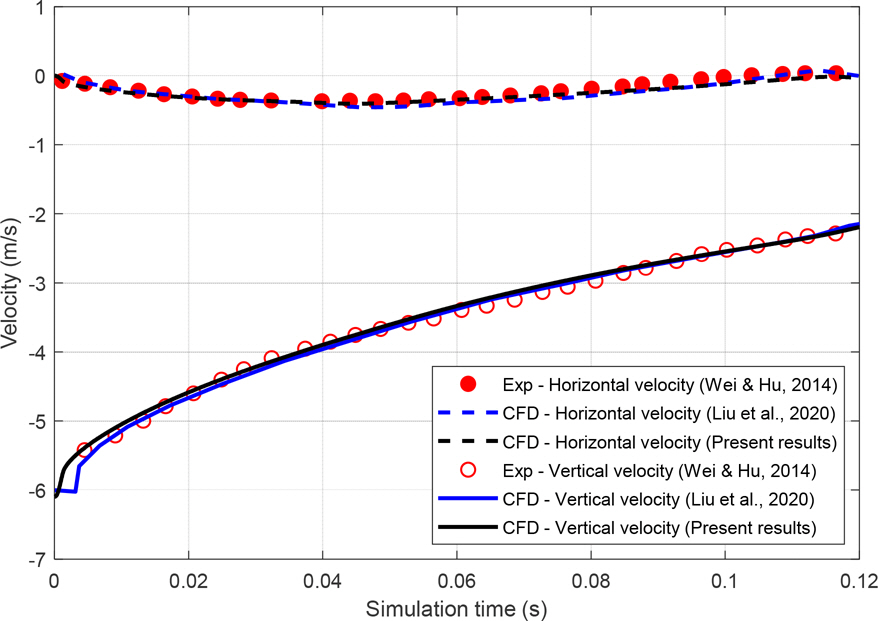
Comparison of the horizontal and vertical velocity of cylinder between existing and present results
3.2 격자 민감도 지표 도출 결과
장갑차 진수 문제에 대한 적절한 격자 시스템 선정 및 격자에 의한 불확실성을 정량적으로 분석하기 위해 미국기계학회 및 국제수조회의에서 제안하는 절차와 방법에 따라 GCI를 도출하였다. 본 연구에서는 비정렬 격자를 사용하였으며 격자 크기에 따른 불확실성을 도출하기 위해 STAR-CCM+상의 기본 격자 크기를 조절하여 Coarse, Medium, Fine 격자를 생성하였다. 각각 격자계의 해당하는 아래첨자를 C, M, F로 하여 나타내었다. 비정렬 격자 기준 격자 길이 스케일 h는 식 (9)과 같다.
여기서 ΔV는 격자의 부피를 의미하며 N은 총 격자수를 의미한다. 격자 길이 비율인 rgMC 및 rgFM는 각 격자계 간 길이 비율로 정의하며 식 (10)와 같다.
Coarse-Medium 격자간 물리량 차 ∈iMC 및 Medium- Fine 격자간 물리량 차 ∈iFM의 비율을 수렴비(grid refinement factor) Ri로 정의하였으며 식 (11)과 같다. S는 물리량을 의미한다.
도출된 수렴비를 이용하여 국제수조회의의 권고에 따라 해의 수렴상태를 파악할 수 있으며 아래와 같다.
식 (12)의 (i) 로 수렴한 경우에 대해서만 Richardson 외삽법을 활용하여 GCI를 도출할 수 있으며 (ii) 의 경우에 대해서는 추가 해석을 수행하여 수렴비의 수렴 여부에 따라 GCI를 도출할 수 있다. (iii) 의 경우에는 GCI 도출이 불가능하다. rgMC = rgFM인 경우, 정도 차수는 아래와 같이 계산할 수 있다.
Coarse-Medium 및 Medium-Fine의 상대 오차는 각각
도출된 상대 오차를 활용하여 Medium 및 Fine 격자계에 대한 GCI를 아래 식과 같이 도출할 수 있으며 이는 격자 밀집도에 의한 수치 해석적 오차를 의미한다.
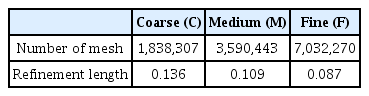
해당 절차에 따라 Coarse-Medium 및 Medium-Fine 간 격자 비율인 rgMC, rgFM를 동일하게 설정하여 격자 밀집도에 의한 불확실성 분석을 수행하였으며 각 격자 시스템에 대한 격자수 및 격자 길이 스케일은 Table 3과 같다.
Grid sizes for the grid convergence analysis
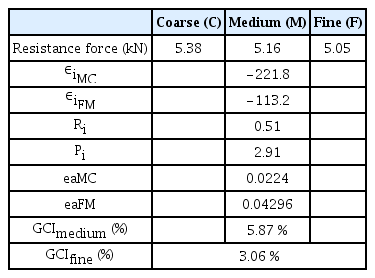
GCI를 도출하기 위해 경사도 16° 조건에서 차체 초기 속도가 12 km/h인 조건에 대해 해석을 수행하였으며 장갑차가 진수 중 발생하는 전체 저항의 시간 평균 값을 물리량으로 설정하여 GCI 값을 도출하였다. 전체 저항 및 GCI를 도출하기 위한 지표를 계산하여 Table 4에 나타내었다. 도출 결과 격자 수렴비가 단조 수렴 구간에 있는 것을 확인하였고 최종적으로 계산된 GCI는 격자 밀집도의 변화에 따라 물리량의 불확실도를 정량적으로 나타내는 지표기 때문에 계산 비용 및 GCI 값을 고려하여 장갑차 진수 문제에 대한 적절한 격자 시스템으로 Fine 격자계를 활용하였다. Fine 격자계에 대한 장갑차 선수 및 선미부 표면 격자를 Fig. 9에 나타내었다.
Results of the grid convergence analysis
Surface grid of the amphibious assault vehicle for fine grid system
3.3 장갑차의 진수 문제 해석 결과
본 절에서는 경사도 및 장갑차의 초기 속도 변화에 따른 장갑차의 동적 거동 수치 해석을 수행하였다. 수행 결과 도출된 경사도 변화에 따른 차체 무게중심점의 변위를 Fig. 10에 나타내었다. 장갑차가 경사로를 따라 진행함에 따라 차체에 작용하는 부력이 증가하게 되며 Z방향 변위가 최대가 되는 시점 이후 차체는 부양을 시작한다. 두 경사로 조건에서 경사로를 따라 이동함에 따라 초기에는 속도 변화에 관계없이 무게중심점의 위치가 동일하지만, 이후 차체의 초기속도가 증가할수록 관성력에 의해 차체의 수몰되는 깊이가 증가함을 알 수 있다. 또한, 경사각이 16°인 경우 11°인 경우에 비해서 수몰되는 깊이가 증가하고 차체에 작용하는 부력이 급격하게 증가하게 되어 부양되는 시점까지의 거리가 짧아지는 특징을 보인다.
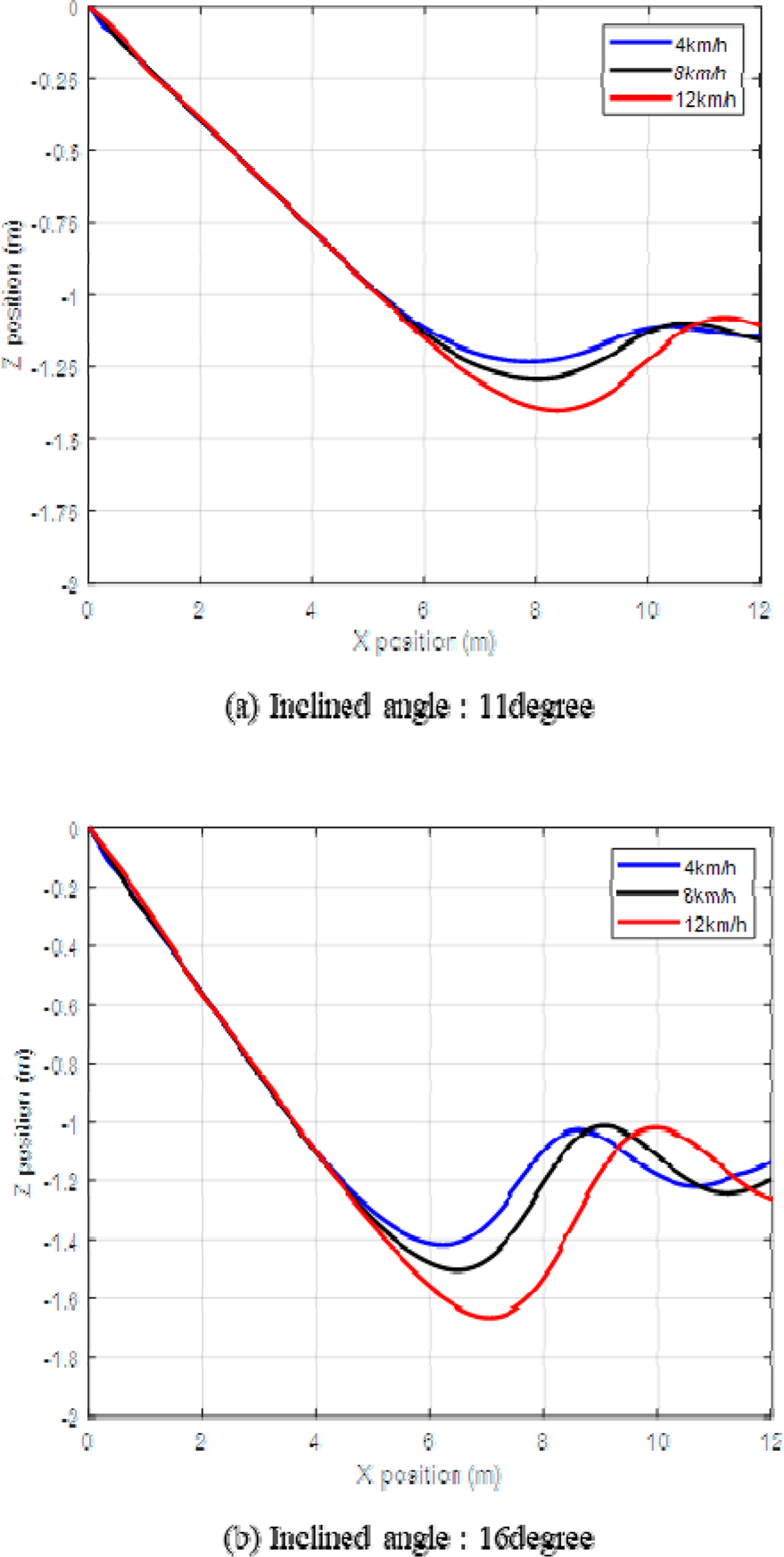
Trajectory of amphibious assault vehicle with different inclined angles (a) 11 degree (b) 16 degree
경사로를 진행함에 따라 경사도 및 차체 속도에 따른 선수 들림 현상을 분석하기 위해 Fig. 11에 종동요 해석 결과를 도시하였다. 초기 종동요 각은 경사각과 동일한 −11°와 −16°이며, 종동요의 경우 경사도가 증가함에 따라 차체 침수 면적이 증가하여 비교적 짧은 거리에서 선수 들림 현상이 발생하는 것을 확인하였다. 초기 차속이 감소함에 따라 종동요 각이 증가하는 것을 확인하였으며 이는 진수가 진행됨에 따라 관성력에 의한 영향으로 판단할 수 있다.

Pitch angle of amphibious assault vehicle with different inclined angles (a) 11 degree (b) 16 degree
선수 들림 현상이 발생한 이후 장갑차의 침수 체적이 증가함에 따라 궤도 끝단에서 작용하는 자중에 의한 모멘트와 부력에 의한 모멘트의 합이 0이 되는 시점에 장갑차는 부양을 시작한다. 경사도가 11°와 16°조건에서 초기 속도별 이동거리에 따른 궤도 끝단에서 작용하는 모멘트를 Fig. 12에 도시하였다. 진수 초기에 수치 해석적 불안정성으로 인해 진동 진폭이 급격하게 증가하는 구간이 존재하며 이러한 결과가 나타난 원인을 분석하기 위해 Fig. 13에 장갑차 궤도면과 경사면간 무차원화한 거리 편차를 도시하였다.
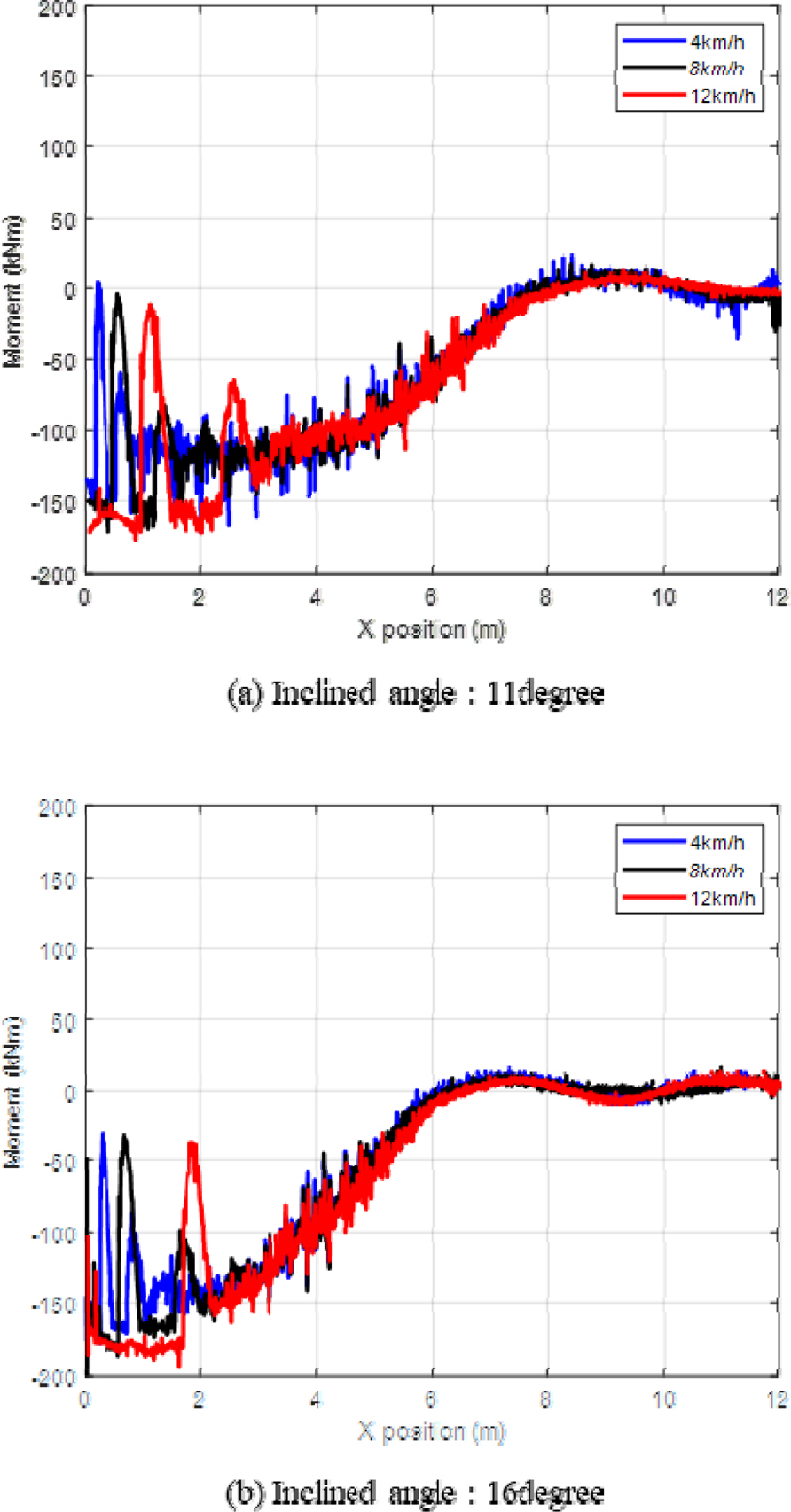
Moment of amphibious assault vehicle at the track edge with different inclined angles (a) 11 degree (b) 16 degree
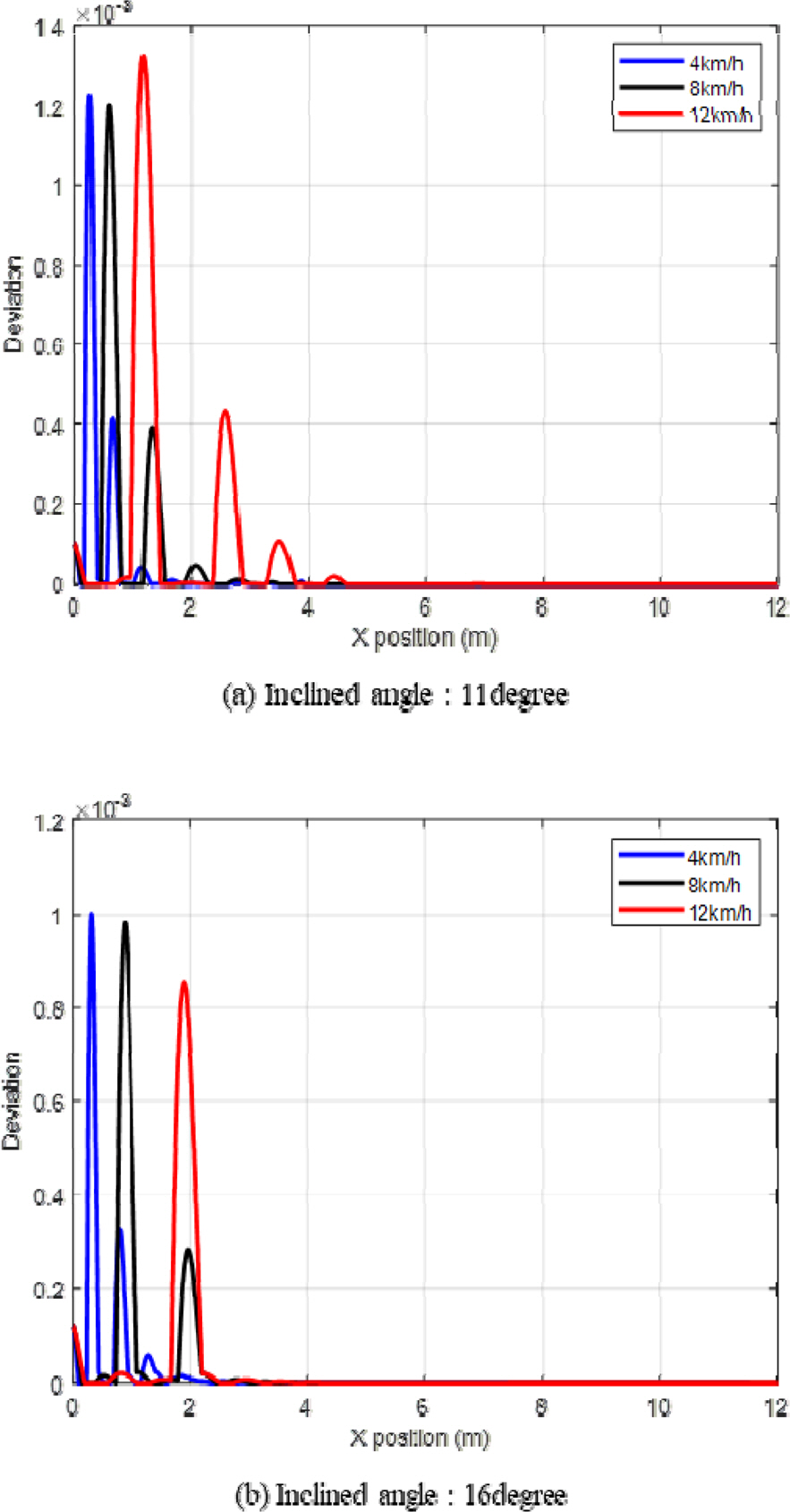
Normalized deviation between track plane of amphibious assault vehicle and inclination plane with different inclined angles (a) 11 degree (b) 16 degree
궤도면와 경사면이 완전히 접촉될 경우 거리 편차는 0이다. Fig. 13의 결과에서 차체의 초기속도 및 경사도 변화에 따른 거리 편차가 큰 위치는 모멘트 진동 진폭이 큰 구간의 위치와 일치하는 것을 확인할 수 있다. 따라서, 모멘트 진동 진폭의 큰 구간은
장갑차의 궤도면과 경사면의 완전 접촉되지 않음으로 발생하는 수치적 불안정성 또는 궤도면이 유체와 접촉함으로써 발생하는 저항에 기인하여 발생하는 현상으로 판단된다. 이러한 현상이 발생하는 원인으로 궤도면과 경사로간 거리가 접촉 공차 이상 발생하는 구간이 존재하기 때문이다. 이후 거리 편차는 경사로를 따라 진행하면서 0으로 수렴하는 것을 확인할 수 있으며 Fig. 12의 결과에서도 모멘트 결과가 안정적으로 진동 진폭이 작아지는 것을 확인할 수 있다. 진수 초기에는 자중에 의한 모멘트가 지배적이며 진수가 진행됨에 따라 침수 체적의 증가로 인해 차체에 작용하는 부력이 증가하여 모멘트가 감소하는 것을 확인할 수 있다. 정량적인 분석을 위해 Fig. 12 결과를 바탕으로 부양이 시작되는 모멘트 합력이 처음 0이 되는 지점에서의 이동 거리를 Table 5에 나타내었다.

moving distance of amphibious assault vehicle with inclined angle and initial velocity
속도가 증가함에 따라 부양하는 시점까지의 이동 거리가 증가하는 것을 확인하였으며 이는 관성력에 의한 영향으로 판단된다. 경사도가 16°인 경우는 11°인 경우에 비해 침수 체적의 증가로 인해 더 큰 부력이 차체에 작용하여 부상 시간이 단축됨을 확인할 수 있다.
한편, 진수 시 상부 구조물의 해수 유입 여부를 분석하기 위해 초기 속도가 4 km/h와 12 km/h인 조건에서 경사도 변화에 따른 최저 높이 위치에서의 자유수면을 Fig. 14에 나타내었다. 11°의 경우, 속도가 증가함에 따라 포탑 구조물이 위치한 상부 침수 면적이 증가하는 것을 알 수 있다. 16°의 경우, 11°의 경우와 유사한 경향으로 상부 구조물의 침수 면적이 증가하는 것을 확인하였으며 초기 속도가 12 km/h인 경우 엔진 흡기부 영역이 침수되는 것을 확인하였다.

Side and perspective view of amphibious assault vehicle at minimum height with different inclined angle and initial velocity
엔진 흡기부 영역의 침수는 엔진의 고장을 야기하며 실제 작전 시 매우 위험한 상황을 초래할 수 있으므로 해당 조건에서의 진수하는 것은 안전상의 이유로 제한해야 할 것으로 판단된다. 동일 경사각에서 장갑차의 차량 속도 변화에 따라 침수영역의 차이가 발생하는 것은 종동요각의 차이로 인한 영향인 것으로 분석되었다. 또한 동일 속도에서 경사가 가파를수록 상부 침수영역이 증가하는 경향은 초기 종동요 각과 침수 체적에 대한 차이로 인해 도출된 결과로 판단한다.
4 결 론
상륙돌격장갑차의 진수 중 동적 거동 수치 해석을 STAR-CCM+ 버전 16.04를 이용하여 해석을 진행하였다. 해석 수행에 앞서, 수치 해석자의 타당성을 검증하기 위해 경사각이 존재하는 원통형 물체의 진수 문제에 대해 기존 실험 결과 및 전산유체역학 해석 결과와 비교하였다. 원통형 물체의 진수 문제를 통해 수치 해석자의 타당성을 검증하였다.
격자 밀집도에 의한 수치 해의 오차를 정량적으로 평가하기 위해 미국기계학회 및 국제수조회의에서 제시하는 절차를 통해 GCI를 도출하여 진수 해석을 위한 적절한 격자 시스템을 선정하였고, 격자에 의한 불확실성을 정량적으로 분석하였다.
진수 해석을 위해 경사도 조건 11°와 16°에 대해 진수 해석을 진행하였으며 차체 초기 속도를 4 km/h, 8 km/h, 12 km/h로 설정하여 경사도 및 차체 속도에 따른 상륙돌격장갑차의 동적 거동 특성을 평가하였다. 경사도 조건 16°인 경우 11°인 경우에 비해 침수 체적의 증가량이 크기 때문에 차체에 작용하는 부력에 의한 모멘트가 크며 부양 시점까지의 이동거리가 적고 선수 들림 현상이 신속히 발생하는 것을 확인하였다. 또한 초기 속도가 증가함에 따라 부상시점까지의 이동거리가 증가하는 것을 확인하였으며 침수 깊이의 증가에 따라 장갑차 상부 구조물의 침수영역이 증가하였다. 특히, 경사도가 16°이고 차체 초기 속도가 12 km/h인 경우에 엔진 흡기부가 침수되는 것을 확인하였으며, 상륙함에서 상륙돌격장갑차의 진수 시 상륙함 선미 램프의 각도 및 진수 속도를 결정할 때 이를 고려해야 한다.
향후 상륙함의 실제 운용 환경을 모사하기 위해 경사로 이전에 존재하는 평행부 영역인 우물갑판(well- dock)을 구현하여 수면 높이에 따른 동적 거동 및 장갑차의 상부 구조물 침수 여부에 대한 분석을 통해 실제 진수 시험을 모사하여 체계시험평가 시 활용하고자 한다.