고속 비행의 Lift-offset 복합형 헬리콥터 기체의 능동 진동 제어 시뮬레이션
Active Airframe Vibration Control Simulations of Lift-offset Compound Helicopters in High-Speed Flights
Article information
Abstract
Abstracts
This paper studies the simulations of active airframe vibration controls for the Sikorsky X2 helicopter with a lift-offset coaxial rotor. The 4P hub vibratory loads of the X2TD rotor are obtained from the previous work using a rotorcraft comprehensive analysis code, CAMRAD II. The finite element analysis software, MSC.NASTRAN, is used to model the structural dynamics of the X2TD airframe and to analyze the 4P vibration responses of the airframe. A simulation study using Active Vibration Control System(AVCS) with Fx-LMS algorithm to reduce the airframe vibrations is conducted. The present AVCS is modeled using MATLAB Simulink. When AVCS is applied to the X2TD airframe at 250 knots, the 4P longitudinal and vertical vibration responses at the specified airframe positions, such as the pilot seat, co-pilot seat, engine deck, and prop gearbox, are reduced by 30.65 ∼ 94.12 %.
1. 서 론
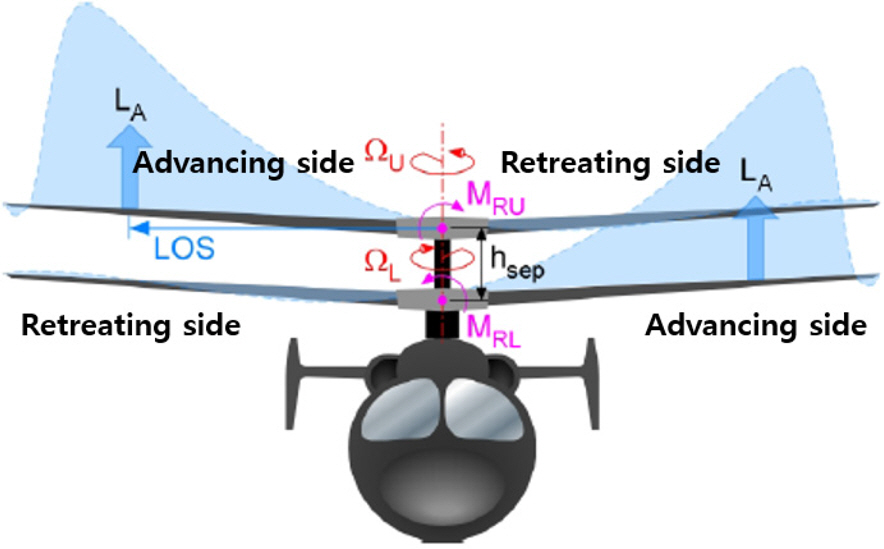
미래의 전장 환경은 과거의 접적·선형·근거리 전투에서 적의 전략적·작전적·전술적 중심을 동시·병렬적으로 공격·파괴·지배하는 속도전의 양상으로 전환됨에 따라 군의 기동타격 능력 향상은 매우 중요한 국방 과제로 대두되고 있다[1]. 특히 전 국토의 70 %가 산악지형인 한반도의 작전 지역의 특성상, 고속 비행능력, 낮은 피탐지성, 넓은 작전반경, 및 고기동 등의 요구조건을 만족하는 차세대 기동 헬리콥터 개발은 매우 중요하다. 기존의 헬리콥터는 고정익 항공기와 비교하여 제자리 비행 및 수직 이착륙의 장점이 있지만, 느린 비행속도(150 ∼ 170 knots)의 단점을 갖는다. 최근 세계 각국의 회전익기 개발사는 로터 이외에 날개와 보조 추력 장치를 동시에 사용하여 고속 비행이 가능한 복합형 헬리콥터(compound helicopter)의 연구 및 개발에 집중하고 있다. 다양한 복합형 헬리콥터 중 특히 Lift-offset 로터[2](rigid coaxial 로터 혹은 강체 동축 반전 로터, Fig. 1)와 보조 추력장치를 동시에 사용하는 Lift-offset 복합형 헬리콥터가 우수한 성능을 보여주고 있다. Sikorsky 社의 X2TD[3,4](X2 Technology Demonstrator, Fig. 2(a))는 Lift-offset 로터를 사용하는 기술 시연기로 250 knots의 최대 수평 비행 속도를 기록하였으며, 최근 미 육군의 FLRAA 및 FARA 사업을 위하여 개발 중인 Lift-offset 복합형 헬리콥터(S-97, SB>1, 및 Raider-X, Figs. 2(b) ∼ (d))의 기본 모델이다.

Various lift-offset compound helicopters
Lift-offset 로터는 동축 반전 로터의 상/하 로터의 전진면(advancing side)에서 대부분의 양력을 발생시키기 때문에 기존의 단일 로터를 사용하는 기존의 헬리콥터에 비하여 우수한 공기 역학적 성능을 갖는다[2–4]. 헬리콥터의 진동은 주 로터에 의한 진동이 지배적이며, 로터 당 로터 블레이드 개수(Nb)의 정수배(n)만큼의 로터 허브 진동 하중 성분(nNbP = nNb/rev)이 기체를 가진하게 된다. 이때 1P(= 1/rev)는 무차원화 된 로터 회전 속도를 의미한다. Lift-offset 로터는 상/하 로터 사이의 블레이드 끝단에서의 간격을 유지하기 위하여 강성이 상당히 큰 블레이드(rigid blade)를 이용하므로 일반적인 헬리콥터 로터와 비교하여 진동 수준이 매우 극심하다. 고속 비행 시 로터에서 발생하는 심대한 진동은 헬리콥터의 로터와 기체에 다양한 구조적 문제를 야기하고 최대 비행 속도를 제한한다[2].
Lift-offset 로터를 사용하는 복합형 헬리콥터는 고속 비행 시 로터의 회전속도를 감속한다. 따라서 특정 주파수 대역의 진동 감소에 효과적인 기존의 수동 진동 저감 기법보다 넓은 주파수 대역에 적용 가능한 진동 제어가 가능한 능동 진동 제어 기법이 효과적이다. Sikorsky 社는 X2TD에 능동 진동 제어 시스템(Active Vibration Control System, AVCS)를 이용하여 고속 비행 시 기체 진동을 제어하였으며, 현재 개발 중인 S-97 Raider 및 SB>1 Defiant에도 이를 적용 중에 있다. AVCS는 기체 진동 신호와 진폭은 같고 위상은 반대인 진동 상쇄 신호를 이용하여 기체 진동을 능동적으로 제어하며, 진동 상쇄 하중을 생성하는 하중 발생기(force generator), 가속도계(accelerometer), 및 폐루프 피드백 제어기(closed-feedback controller)로 구성된다[5–7].
X2TD의 경우 AVCS 적용에 대한 시뮬레이션 및 비행 시험을 이미 성공적으로 수행하였다[4,8]. 그러나 X2TD의 능동 진동 제어 시뮬레이션 연구를 위한 모델링, 해석, 및 시뮬레이션 기법에 대하여 체계적인 서술이 보고된 바 없다. 따라서 본 연구에서는 X2TD 헬리콥터에 대하여 모델링, 진동 응답 해석, 및 능동 진동 제어 시뮬레이션을 수행하고 관련 기법들을 구체적으로 제시한다. X2TD의 최대 비행 속도 250 knots에서의 4P 로터 허브 진동 하중은 회전익기 통합 해석(rotorcraft comprehensive analysis) 코드인 CAMRAD II 를 이용한 선행 연구[9]로부터 얻었으며 기체 구조 동역학 모델링 및 4P 진동 응답 해석은 MSC.NASTRAN 을 사용하여 수행한다. 기체 진동 제어를 위한 AVCS 의 구현은 MATLAB Simulink를 이용한다. 본 논문의 얻어진 연구 결과를 통하여 고속 비행을 위한 Lift-offset 복합형 헬리콥터 기체 진동의 능동 제어를 위한 모델링, 해석, 및 제어 기법을 정립할 수 있음을 제시한다.
2. 본 론
2.1 연구 방법
2.1.1 X2TD lift-offset 복합형 헬리콥터
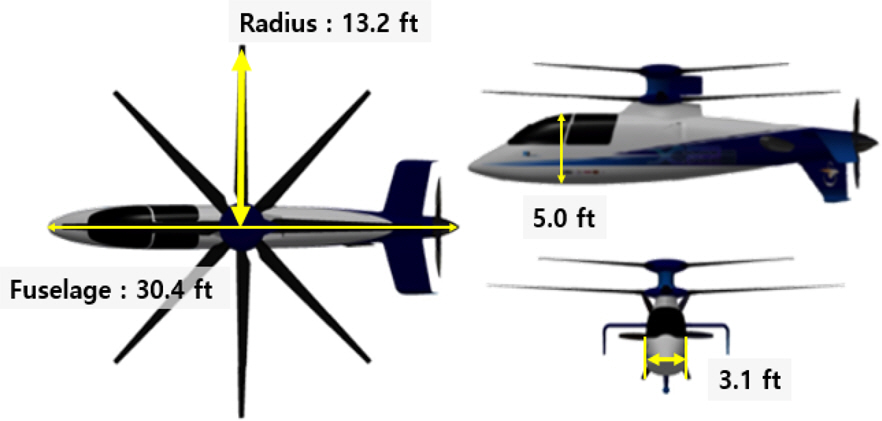
본 논문의 연구 모델인 Sikorsky 社의 X2TD는 ABCTM(Advancing Blade ConceptTM)을 사용하는 6,000 lb급 Lift-offset 복합형 헬리콥터이다. X2TD는 XH-59A Lift-offset 복합형 헬리콥터의 단점인 고속 비행 시 발생하는 고진동 및 저효율 문제를 해결하기 위해 개발되었으며, 2010년 9월 비행 시험에서 최대 수평 비행 속도 250 knots를 달성하였다. X2TD는 상/하 로터 각각 4개의 블레이드를 사용하는 Lift-offset 로터와 6개의 블레이드가 사용된 푸셔(pusher) 프로펠러를 동시에 사용한다. X2TD Lift-offset 복합형 헬리콥터의 제원을 아래 Table 1에 정리하였다[3,4,10].
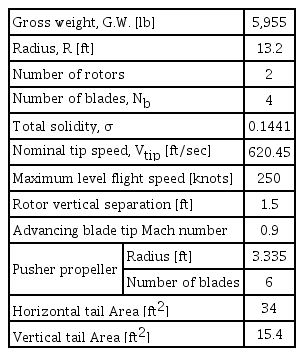
General properties of the X2TD lift–offset compound helicopter
2.1.2 로터-기체의 일방향 연계 해석 기법
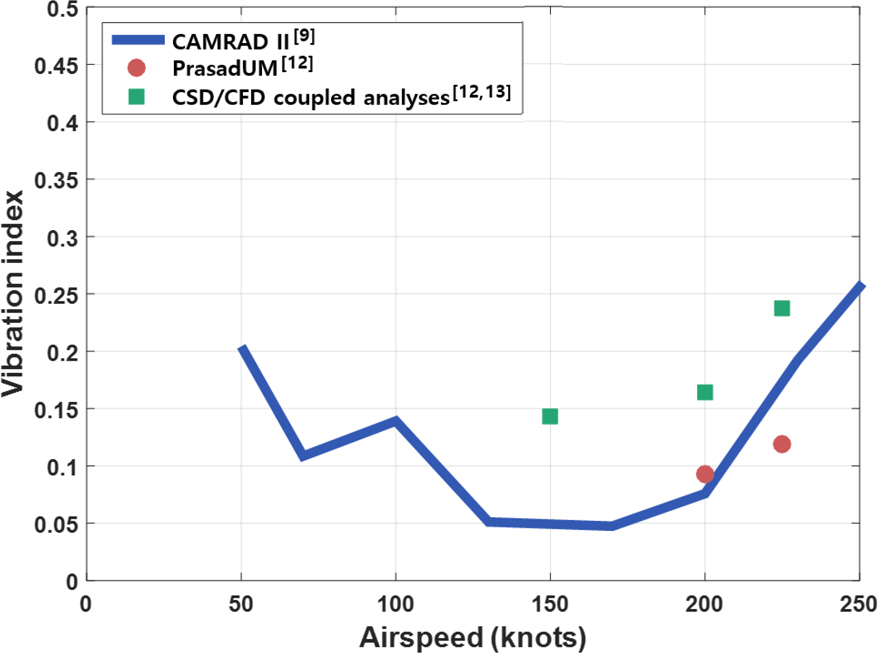
X2TD 기체의 AVCS 시뮬레이션 연구를 위한 기체 진동 응답 해석을 로터-기체의 일방향 연계 기법(one-way coupling method, Fig. 3)을 이용하여 수행하였다. 일방향 연계 기법은 로터와 기체를 별도로 모델링 및 해석하는 기법으로, 로터-기체를 하나의 모델로 구성하는 양방향 연계 기법(two-way coupling method)에 비하여 간단하고 신속히 기체 진동 응답 해석을 수행할 수 있다. 특히, Lift-offset 로터와 같이 로터 회전축(shaft)의 강성이 높은 경우 헬리콥터 기체 진동 응답 해석 및 AVCS의 하중 발생기의 설계 등에 일방향 연계 기법은 효과적으로 이용될 수 있다[7,11]. 본 연구에서는 회전 익기 통합 해석 코드인 CAMRAD II를 이용한 선행연구[9]로부터 얻어진 X2TD 로터 단독 모델(isolated rotor model)의 4P 로터 허브 진동 하중을 이용하여 X2TD 기체 구조 모델의 로터 위치를 가진한 뒤, 기체 주요 위치에서 기체 축 방향(longitudinal direction) 및 수직 방향(vertical direction)으로의 4P 진동 응답을 MSC.NASTRAN을 사용하여 얻었다. X2TD 로터의 모델링 및 해석에 대한 설명은 참고문헌[9]에 상세히 주어져 있으며, Fig. 4에 보듯이, 최대 비행 속도 250 knots에서 로터 진동 지수(VI, vibration Index, 식 (1))가 최대의 값임을 알 수 있다[9]. 250 knots에서 X2TD lift-offset 로터 허브의 4P 진동 하중 성분을 Fig. 5에 나타내었다. 상/하 로터가 로터 방위각 0도에서 교차되므로 6개의 로터 허브 진동 하중 성분 중 × 및 z축 방향의 힘 성분과 y축에 대한 모멘트 성분만 존재한다[9].
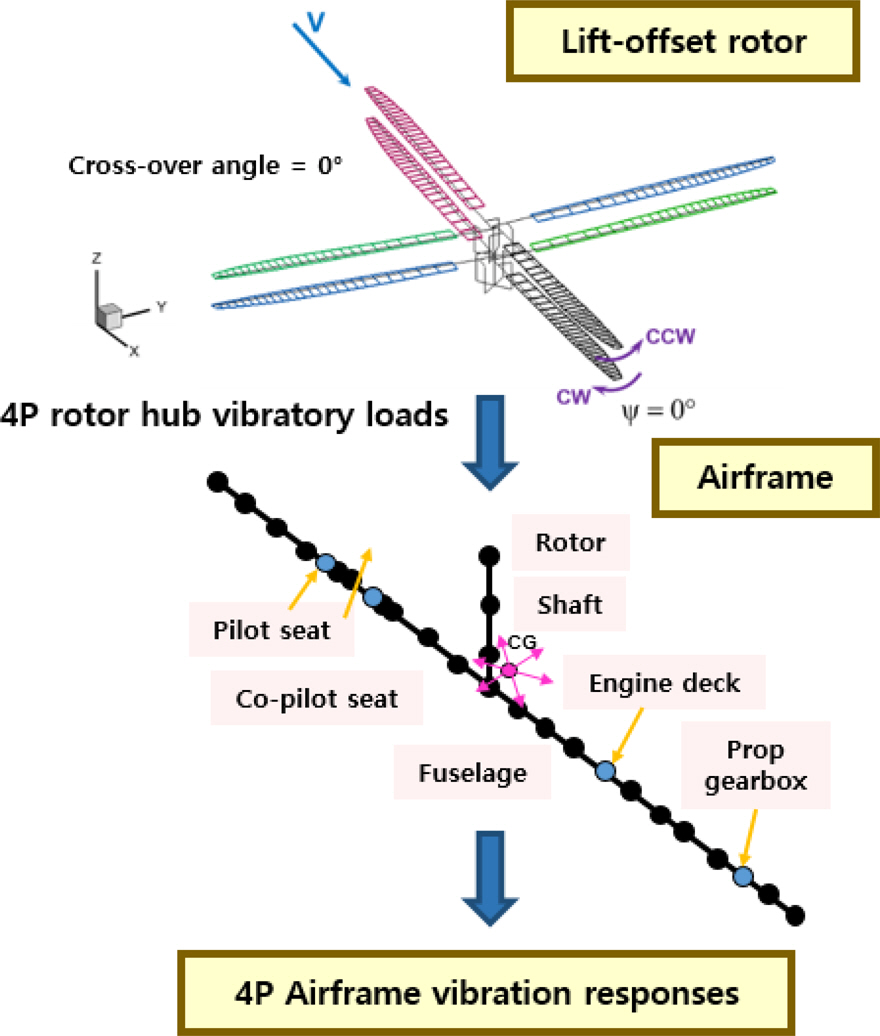
One-way coupling analysis technique for rotor-airframe system

2.1.3 정규 모드 해석용 기체 모델링
X2TD 기체의 구조 동역학 모델링 및 4P 기체 진동 응답 해석은 상용 유한 요소 해석 프로그램인 MSC.NASTRAN을 사용하여 수행하였다. X2TD 기체구조는 1차원(1D) 탄성보 요소를 사용하여 1D stick 모델로 나타내었다. 1D stick 모델은 3D 기체 모델에 비해 적은 자유도를 사용함에도 불구하고 적절한 기체 진동 응답을 예측할 수 있다[14]. 1D stick 모델링을 위한 기하학적 제원은 공개된 X2TD의 3차원 도면으로부터 얻었다(Fig. 6). X2TD 기체의 주요 구성 요소의 중량 데이터는 X2TD와 형상이 유사한 Lift-offset 복합형 헬리콥터에 대한 NASA의 개념설계 연구 결과의 중량 정보[15]를 X2TD의 총 중량(G.W.)과 일치하도록 Mach-scaling 기법을 적용하여 얻었다. 확보한 기체 주요 요소의 중량을 1D stick 유한요소 모델의 절점(node)에 CONM2 요소를 이용하여 모델링하였으며 이 때 항공기의 무게 중심(Center of Gravity, C.G.)이 로터 회전축 근처에 위치하도록 유의하였다. 1차원 탄성보는 가상의 단면적 및 재료 물성치를 사용하여 X2TD 기체 구조의 모드 특성(저차 모드의 고유 진동수)을 구현하도록 설계하였다. X2TD 기체의 주요 저차 모드의 고유 진동수는 공개되지 않았기 때문에 Sikorsky 社의 연구 결과[4]를 참고하여 주요 저차 모드의 목표 고유 진동수를 설정하였다(Table 2). 선행연구[4]에 주어진 동체의 1차 모드 고유 진동수의 추정값으로부터 동체 1차 모드의 목표 고유 진동수를 설정하였으며, 선행연구[4]의 가진 진동수와 동체의 진동 응답 해석의 결과로부터 동체 2차 모드의 고유 진동수의 목표값을 설정하였다. Table 2는 X2TD 기체 주요 저차 모드의 목표 고유 진동수와 본 연구의 1D stick 모델의 자유 경계 조건(free-free B.C.)에서 정규 모드 해석 결과의 비교를 나타낸다. Table 2에서 볼 수 있듯이 본 논문의 1D stick 모델의 고유 진동수가 목표 고유 진동수를 잘 만족시킴을 알 수 있다. 단, 선행연구[9]의 X2TD 로터 모델링과 유사하게, X2TD 기체 구조 모델링을 위한 공개된 정보가 많지 않으므로 본 연구의 기체 모델이 정확하게 X2TD 기체를 나타내기 어려울 수 있다. 따라서 X2TD와 유사한 Lift-offset 복합형 헬리콥터로 표현되어야 하지만, 본 논문에서는 편의상 X2TD 헬리콥터로 지칭한다.
X2TD 3-D drawings
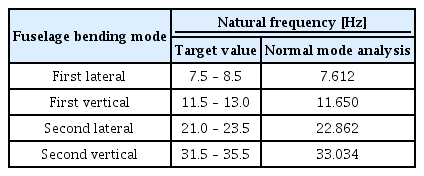
Normal mode analysis for the X2TD airframe stick model(free–free B.C.)
2.1.4 지상 진동 시험용 기체 모델링
X2TD 기체의 4P 기체 진동 응답을 계산하기 위해, 기 구축된 정규 모드 해석용 1D stick 모델에 2개의 번지 케이블을 추가하여 지상 진동 시험(Ground Vibration Test, GVT, Fig. 7) 모델을 구현하였다. 기체 진동 응답 계산 시 기체의 지상 진동 시험 모델의 사용은 전기체 트림을 사용하지 않은 일방향 연계 기법에 보다 적합하다. GVT 모델의 로터(node 25)에 기체 수직 및 수평 방향의 4P의 가진 진동수의 가진력을 각각 적용하여 주파수 응답 해석(Frequency Response Analysis, FRA)을 수행하였다. 이때 번지 케이블의 기하학적 및 재료 물성치는 GVT 모델의 6개의 강체 모드의 고유 진동수가 동체의 1차 수직 굽힘 모드 고유 진동수의 20% 미만이 되도록 가상의 물성치를 사용하고, 자유 경계 조건에서 정규 모드 해석용 모델의 고유 진동수의 값(Table 2)과 GVT 모델의 주파수 응답 해석 결과가 유사할 수 있도록 설계하였다. Table 3에서 알 수 있듯이 자유 경계 조건에서 1D stick 모델의 모드 해석 결과와 GVT 모델의 주파수 응답 해석 결과가 −0.026 ∼ 3.6 %의 차이를 보이므로 본 연구의 GVT 모델이 비행 중의 X2TD 기체의 4P 진동 응답 해석에 사용될 수 있음을 확인하였다.
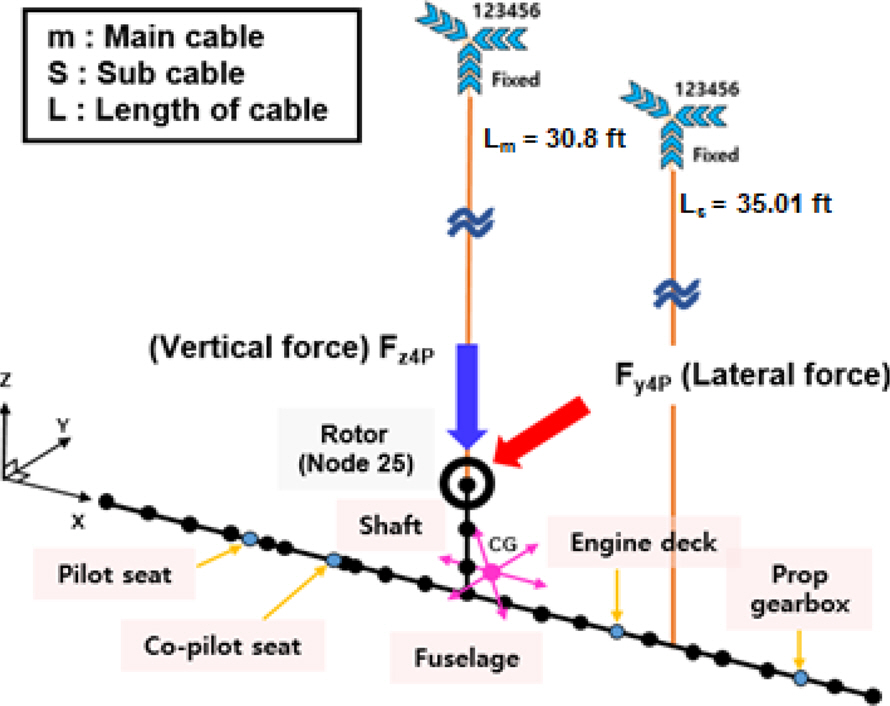
Ground vibration test(GVT) model
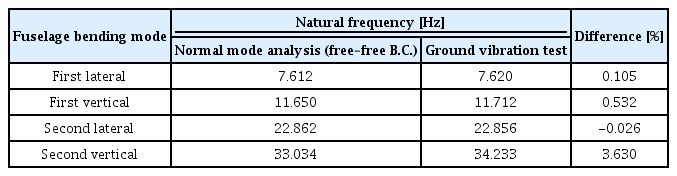
Natural frequencies of the X2TD airframe stick model
2.1.5 능동 진동 제어 시스템(AVCS)
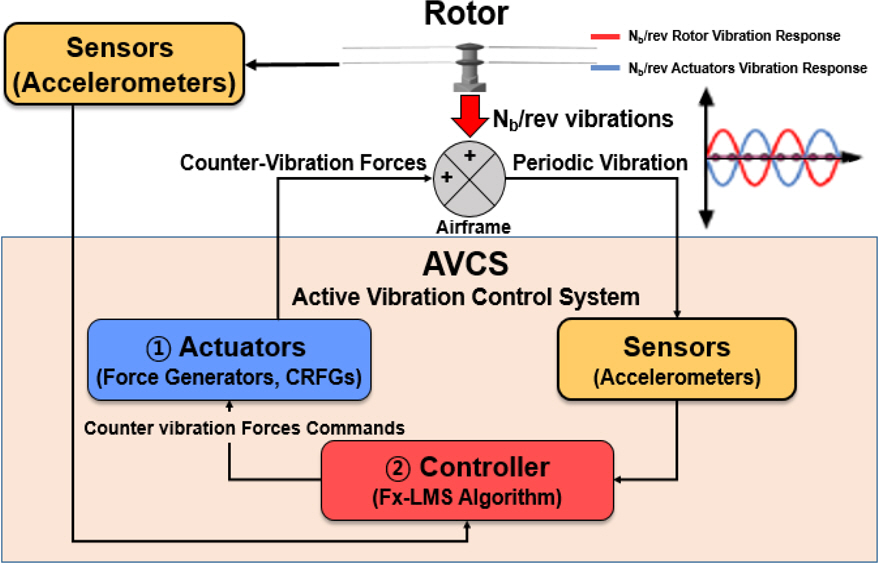
Fig. 8은 기체 진동 제어를 위한 능동 진동 제어 시스템(AVCS)의 개념도이다. AVCS의 작동 원리는 다음과 같다. 먼저 기체 주요 위치에 부착된 가속도계를 이용하여 기체 진동 응답을 측정한다. 이후 폐루프 피드백 제어기(closed-feedback controller)에서 기체 진동 응답 신호와 크기는 동일하나, 위상은 반대인 진동 상쇄 신호를 계산한다. 마지막으로 하중 발생기(force generator)에서 진동 상쇄 하중을 발생시켜 기체의 진동을 제어한다.
Concept of AVCS(Active Vibration Control System)
본 연구의 하중 발생기는 편심 질량을 갖는 한 쌍의 편심 질량을 갖는 원판이 상대각을 갖고 회전하며 만드는 원심력을 통하여 특정 방향으로의 선형 하중을 발생시킨다(Counter Rotating Force Generator, CRFG[5]). CRFG의 제원은 Sikorsky 社의 시뮬레이션 연구 결과를[4] 참고하여 사용된 6개의 CRFG의 총 중량이 기체의 총 중량의 1.3 %가 되도록 가정하였다. 이와 더불어 참고문헌[5,16]을 참조하여 본 시뮬레이션 연구를 위한 가상의 CRFG를 설계하였다. CRFG의 원판은 4P의 회전 속도로 회전하며, 원판의 편심 질량의 중량과 회전 반경은 각각 3.89 lb와 0.2 ft로 설계하였다. 따라서, 한 개의 하중 발생기로부터의 최대 진동 상쇄 하중의 크기는 663.05 lbf로 얻어질 수 있다.
AVCS에서 진동 상쇄 하중을 계산하는 피드백 제어기는 능동 소음 제어 연구에 널리 사용되는 Fx-LMS (Filtered-x Least Mean Square, Fig. 9) 알고리즘[6]을 사용하였다. Fx-LMS 알고리즘은 로터에서 발생되는 기준 신호(reference theta, x(n))와 가속도계로 측정된 에러 신호(e(n))를 이용하여 업데이트된 제어 입력 신호 (u(n))으로부터 생성된 진동 상쇄 신호ŷ(n)가 헬리콥터 기체의 진동 신호(y(n))을 상쇄한다. Fx-LMS 알고리즘은 에러 신호(e(n))를 최소화하도록 경사 하강법 (gradient descent)을 사용하여 제어 입력 신호(u(n))을 계산한다. Fx-LMS 알고리즘에 대한 보다 자세한 설명은 선행 연구[5–7]에 주어져 있다.

Block diagrams for AVCS
2.1.6 AVCS의 MATLAB Simulink 모델링
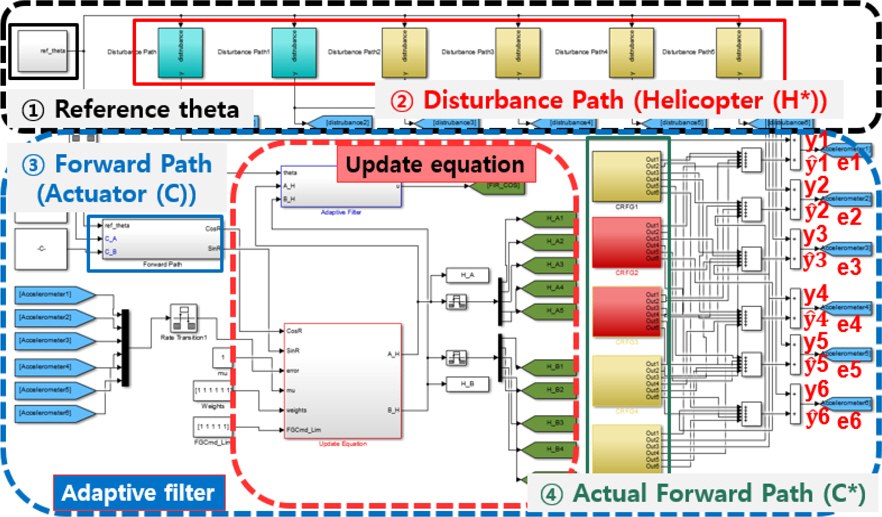
X2TD 헬리콥터 기체의 능동 진동 제어를 위해 MATLAB Simulink 프로그램을 사용하여 전술한 AVCS 를 Fig. 10과 같이 모델링하였다. Fig. 10의 Reference theta(block ①)는 X2TD 로터의 4P 신호의 위상을 나타내며, Disturbance path(block ②)는 헬리콥터의 비행 시, 발생하는 기체 진동의 전달 함수를 의미한다. 본 연구의 Disturbance path(block ②)의 출력 신호(y(n))은 MSC.NASTRAN을 이용한 X2TD의 기체 진동 응답 해석으로 계산된 4P 기체 진동을 표현한다. Forward path (block ③)는 하중 발생기를 통해 생성되는 기체 진동의 전달 함수를 나타내고, Actual forward path(block ④)는 제어 입력 신호(u(n))에 의해 발생되는 하중 발생기 진동의 수학적 전달 함수를 의미한다. AVCS에 사용된 수학적 전달 함수는 선형 시불변(Linear Time Invariant, LTI) 시스템으로 가정한다. 선형 시불변 시 스템의 특성으로 인해 AVCS의 전달 함수를 통과하는 신호의 진폭은 입력 신호의 크기에 비례하고, 신호의 주파수는 입력 신호의 주파수와 동일하게 출력된다. 최적의 제어 입력 신호(u(n))를 계산하기 위해 에러 신호(e(n))를 최소로 만드는 수학적 전달 함수의 시스템 식별 계수는 LMS 업데이트 방정식을 이용하여 계산하였다[5].
MATLAB Simulink modeling for AVCS
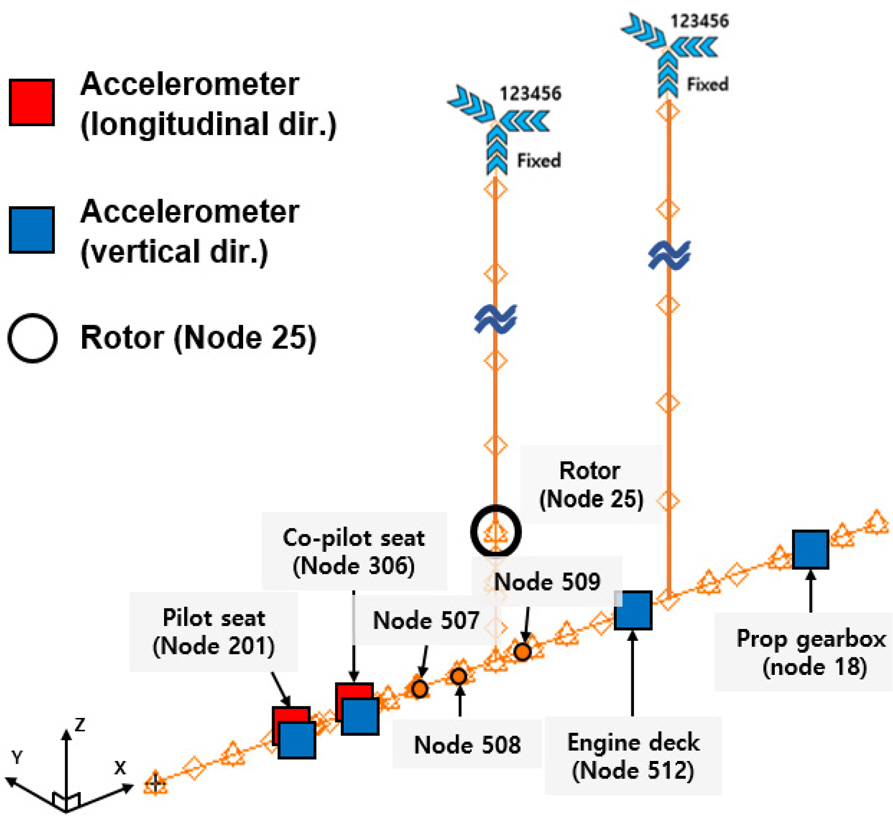
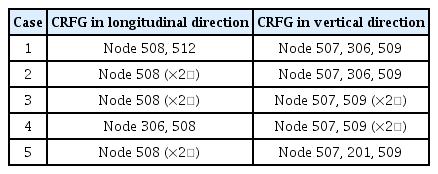
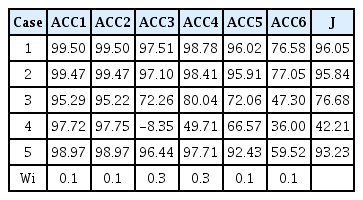
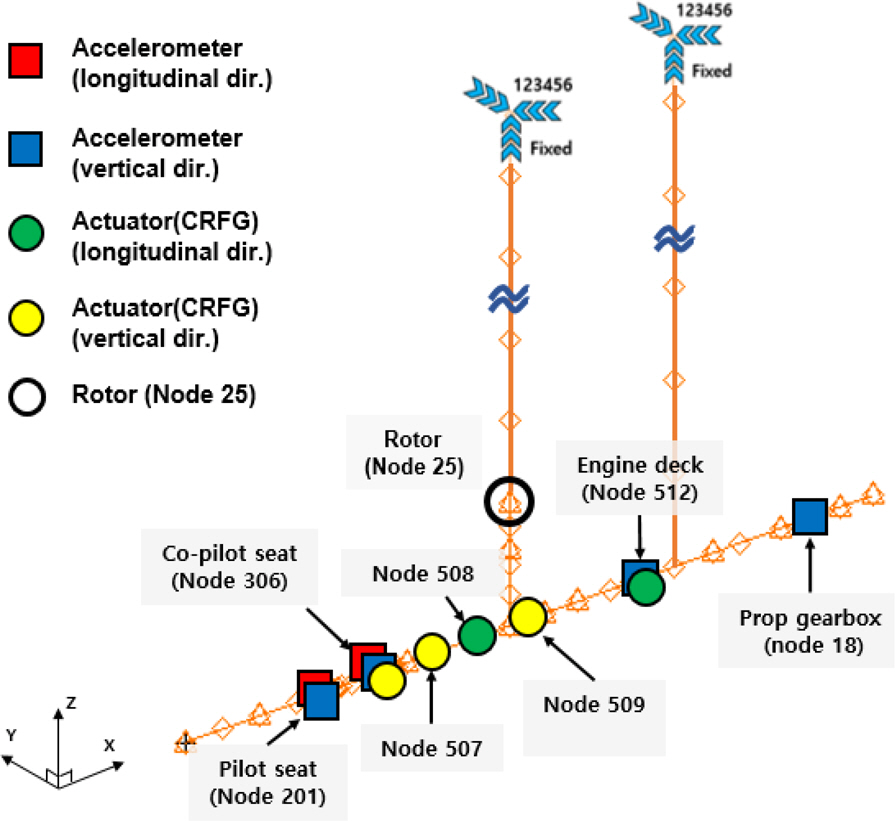
본 논문의 AVCS는 6개의 가속도계와 5개의 하중 발생기(CRFG)를 사용하여 구성되었다. 가속도계의 위치는 Sikorsky 社의 선행 연구[4]를 참고하여 조종석 및 부조종석에 기체 수직 및 수평 방향으로, 엔진 데크 및 프로펠러 기어박스 위치에 기체 수직 방향으로 배치하였다(Fig. 11). 5개의 CRFG를 하중 발생기로 사용하였으며, 이때 CRFG의 배치 및 진동 상쇄 하중의 방향에 따라 능동 진동 제어 성능이 크게 변화하므로 진동 제어 성능이 우수한 CRFG 배치 조합을 찾기 위해 Table 4에 정리된 5개의 Case에 대해 능동 진동 제어 시뮬레이션을 수행하였다. 5개의 Case 중 Case 3은 Sikorsky 社의 CRFG의 배치 및 진동 상쇄 하중의 방향 등을 최대한 유사하게 이용하였다[4]. Table 4에서 동일 위치(node)에 2개의 CRFG를 배치한 경우는 기체 축의 동일한 위치에서 동체의 좌측면과 우측면에 각각 CRFG를 이용한 모델을 의미한다. 또한, 각각의 Case에 대하여 MSC.NASTRAN 모델링 시 CRFG의 중량을 CRFG가 위치한 절점에 입력하였다.
Locations of accelerometer for GVT model
Locations of CRFGs for the case study
2.2 연구 결과
2.2.1 기체 진동 응답 해석
기체 진동 응답 해석을 위하여 X2TD 기체의 최대 수평 비행 속도인 250 knots 조건에서 CAMRAD II 해석으로 얻어진 Lift-offset 로터의 4P 허브 진동 하중을 GVT 모델의 로터(Node 25)에 입력하였다(Fig. 12). X2TD 기체 진동 응답 계산을 위한 GVT 모델의 적절성을 판단하기 위해 비행속도 250 knots에서의 선행연구[4]의 조종석 및 부조종석 위치에서 진동 응답 해석 결과와 본 연구의 4P 기체 진동 응답을 Fig. 13에 비교하였다. 그림의 선행연구[4]의 기체 진동 응답의 결과는 비행속도 260 knots에서의 해석 결과로부터 외삽법을 이용하여 나타내었다. Fig. 13에서 볼 수 있듯이 본 연구의 X2TD 헬리콥터의 기체 축 방향에 대해 4P 기체 진동 응답은 선행 연구[4] 대비, 조종석에서 3.92 %, 부조종석에서 3.45 % 만큼, 기체 수직 방향에 대해 4P 기체 진동 응답은 조종석에서 −4.28 %, 부조종 석에서 −15.14 % 만큼 오차를 보였다. 부조종석에서의 기체 수직 방향으로의 진동 응답의 오차가 다소 크나, X2TD 모델링 정보에 대한 부족 등을 고려 시 모두 적절한 크기의 오차로 여겨진다. 따라서 본 논문의 GVT모델이 X2TD 기체의 동특성을 적절히 구현하는 것으로 판단된다.
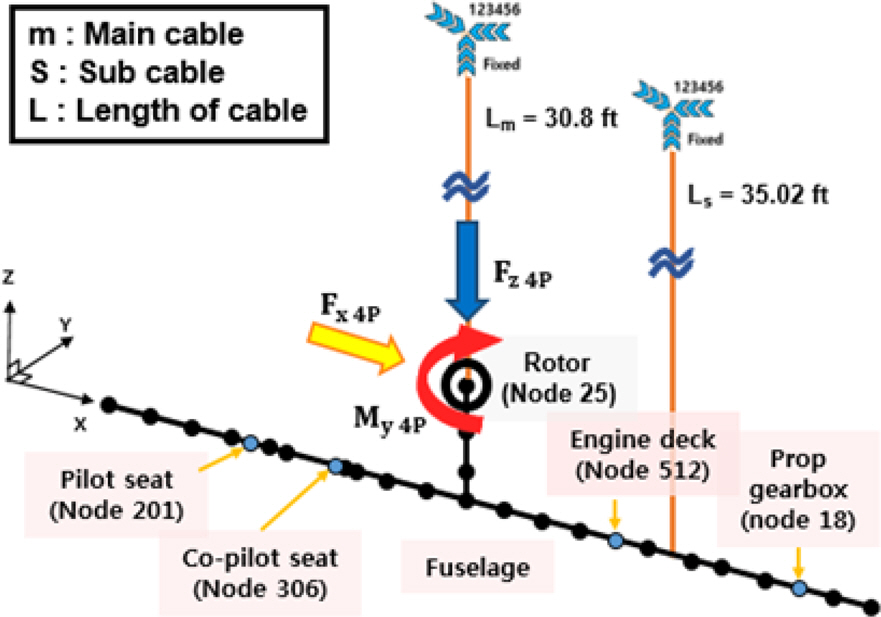
GVT model for airframe vibration response analysis
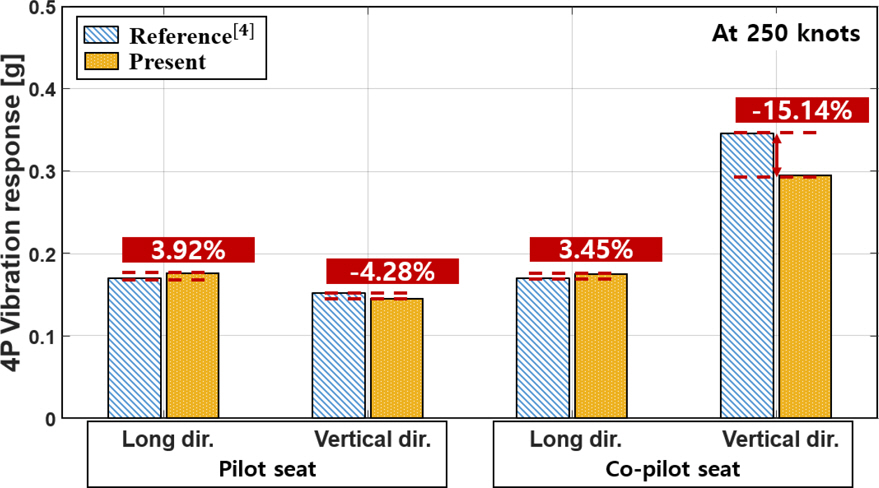
Validation of 4P airframe vibration responses at 250 knots
Table 5에 본 연구의 AVCS의 적용을 위하여 기체 주요 위치에 배치된 6개의 가속도계 위치에서 계산된 4P 기체 진동 응답의 크기를 정리하였다. 전술한 바와 같이 엔진 데크 및 프로펠러 기어 박스의 위치에서는 기체 수직 방향으로의 4P 진동 응답만 계산하였다. 부조종석 위치에서 기체 수직 방향의 진동이 가장 극심했으며, 프로펠러 기어박스에서 기체 수직 방향의 진동을 제외한 5개의 가속도계 위치에서의 4P 기체 진동 응답은 일반 헬리콥터 진동 목표 수준[8]인 0.1 g 보다 높게 얻어졌다. 따라서 250 knots 비행 조건에서의 X2TD 기체 진동의 저감이 필요함을 알 수 있다. 더불어, Fig. 5에 주어진 바와 같이 기체 횡 방향(y축)에 대한 로터 허브 진동의 힘 성분과 x축에 대한 로터 허브 진동의 모멘트 성분은 고려되지 않으므로 본 논문에서는 기체 횡 방향에 대한 진동 응답 및 제어는 고려되지 않았다.
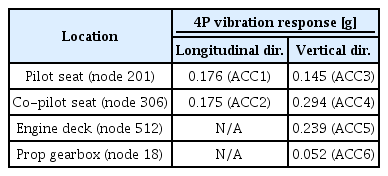
4P airframe vibration responses(250 knots)
2.2.2 AVCS를 이용한 기체 진동 제어
Fig. 14는 Table 4에 정의된 5가지 Case에 대해 AVCS를 이용한 X2TD 기체의 능동 진동 제어 결과를 보여준다. 그림의 Baseline은 AVCS가 적용되지 않은 X2TD의 4P 기체 진동 응답을 의미한다. 5개의 Case에 대한 능동 진동 제어 결과와 Baseline을 비교할 경우, 대부분의 가속도계 위치에서 기체 진동이 분명하게 제어(감소)되었으나, Case 4의 조종석 위치(ACC3)에서 기체 수직 방향의 4P 기체 진동은 감소 대신 증가하였다. 따라서 5개의 Case에 대하여 AVCS를 적용한 기체 진동 제어 성능이 가장 우수한 Best Case 선정을 위해 식 (2)를 정의하였다.
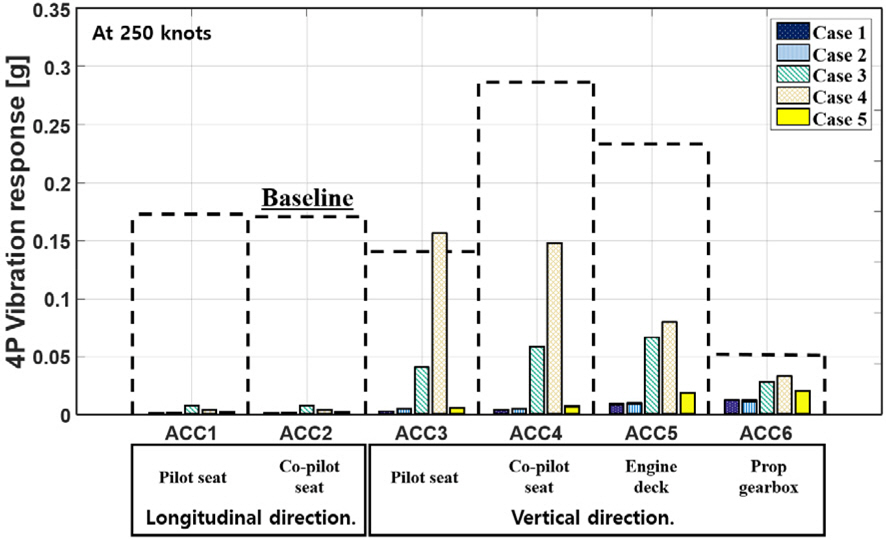
Case study results for 4P airframe vibration response reductions using AVCS
여기서 J는 진동 감소율(%) 평가를 위한 목적 함수이다. ri는 i번째 가속도계의 4P 기체 진동 감소율(%)이며, Wi는 i번째 가속도계에 적용된 가중치이다. AVCS 를 이용한 기체 진동 제어 결과에서 조종석 및 부조종석 위치에서 기체 축 방향보다 기체 수직 방향의 4P 기체 진동 제어가 어려웠기 때문에 목적 함수 J의 계산 시, W1,2,5,6에 0.1의 가중치를, W3,4에 0.3의 가중치를 적용하였다. 5개의 Case에 대한 AVCS를 이용한 능동 진동 제어 결과 및 목적함수(J)의 값을 Table 6에 요약 정리하였다. 목적 함수(J)를 이용한 진동 감소율 평가 결과, Case 1의 목적 함수(J)의 값이 가장 높게 계산되었으므로 Case 1(Fig. 15)을 Best Case로 선정하였다. Fig. 16에 Case 1을 이용한 기체 능동 진동 제어 결과를 시간 응답으로 나타내었다. 기체 축 방향에 대해 4P 기체 진동 응답은 조종석(Fig. 16(a))에서 99.50 % 부조종석(Fig. 16(b))에서 99.50 % 만큼 감소되어 매우 우수한 진동 제어 성능을 보였다. 기체 수직 방향에 대해 4P 기체 진동 응답은 조종석(Fig. 16(c))에서 97.51 %, 부조종석(Fig. 16(d))에서 98.78 %, 엔진 데크(Fig. 16(e))에서 96.02 %, 프로펠러 기어박스(Fig. 16(f))에서 76.58 % 만큼 감소하였다. 프로펠러 기어박스 위치(ACC6)에서 기체 수직 방향 진동 감소율이 다른 위치에 비해 낮음을 알 수 있다. 그러나 감소된 진동 응답의 진폭은 0.015 g로 X2TD의 기체 진동 수준 목표값(0.1 g)[8]보다 훨씬 낮기 때문에 본 논문의 AVCS를 이용한 기체 진동 제어 결과가 적절한 것으로 판단할 수 있다.
4P airframe vibration reductions(%) using AVCS(250 knots)
Airframe vibration response analysis model using AVCS(Case 1)

Reduced 4P airframe vibration responses using AVCS at 250 knots(Case 1)
3. 결 론
본 연구에서는 Sikorsky X2TD 헬리콥터에 대하여 모델링, 기체 진동 응답 해석, 및 능동 진동 제어 시뮬레이션 연구를 수행하였다. X2TD 로터의 4P 로터 허브 진동 하중은 저자들의 선행 연구로부터 얻었으며, X2TD 기체의 구조동역학 모델은 MSC.NASTRAN을 사용하여 1D stick 모델로 구현하였다. X2TD 기체의 진동을 일반 헬리콥터의 기체 진동 수준으로 제어하기 위하여 6개의 가속도계와 5개의 CRFG로 구성된 AVCS 를 사용하였다. AVCS의 진동 상쇄 하중을 발생시키기 위한 제어 입력 신호는 Fx-LMS 알고리즘을 사용하여 계산되었으며, AVCS 시뮬레이션 프레임 워크는 MATLAB Simulink 프로그램을 사용하여 구성하였다.
X2TD 로터 진동이 가장 극심한 250 knots에서의 기체의 최대 진동 감소율을 얻기 위하여 CRFG의 배치에 대한 5개의 Case의 AVCS 시뮬레이션을 수행하였다. AVCS를 사용하였을 때, 대부분의 기체 주요 위치에서 기체 진동 응답이 감소됨을 확인하였다. 5개의 Case 중 Best Case로 선정된 Case 1에서 X2TD 기체의 대부분의 주요 위치에서 4P 기체 진동 응답이 Sikorsky 社의 기체 진동 감소 목표값(0.1 g)보다 낮게 감소(제어)되었으며 76.58 ∼ 99.50 %의 진동 감소율을 얻을 수 있었다.
비록 공개된 자료의 부족으로 인하여 기존 Sikorsky 社의 선행 연구 결과와의 상호 비교는 본 연구에서는 수행되지 않았으나 X2TD 기체의 모델링, 진동 해석, 및 능동 진동 제어 시뮬레이션 기법을 체계적으로 제시하였다. 따라서 향후 본 연구를 통해 수립된 모델 링, 해석, 및 능동 진동 제어 시뮬레이션 기법은 차세대 고속 복합형 회전익기의 설계 및 진동 제어 등의 분야에 폭넓게 활용될 수 있을 것이다.
후 기
본 연구는 국방과학연구소의 지원으로 차세대 고속 복합형 무인 회전익기 특화연구실에서 수행되었습니다. 본 논문의 일부는 한국항공우주학회 2021년도 춘계학술대회에서 발표되었습니다.