소노부이의 음향신호 수신 및 제어를 위한 통신장치 개발
Development of Communication Device for Sound Signal Receiving and Controlling of Sonobuoy
Article information
Abstract
Low Frequency Active Sonobuoy(hereinafter referred to as LFAS) are being developed in Korea in consideration of compatibility with existing overseas sonobuoys, and a communication device for acoustic signals receiving and operating control of LFAS has been developed. The communication device needs to verify compatibility with the existing Sonobuoy, and for this purpose, the standardized Sonobuoy communication protocol was applied. The communication device is designed/manufactured to transmit the acoustic signal received in real time from the Sonobuoy through VHF band RF communication to the data processing device, and transmit CFS/CSG commands for operation control to the Sonobuoy through UHF band RF communication. In order to verify the manufactured communication device, the communication status and performance were verified by interlocking test through Ultra Electronics' PASS-II equipment and domestically developed electronic device of Sonobuoy. In addition, operability was verified through environmental tests, water tanks, and marine operations. In the future, the communication device of sonobuoy can be used for verification of the Sonobuoy developed in Korea.
1. 서 론
기존까지는 대잠 상황에서 적 잠수함이 수중에서 방사하는 소음을 수동형 소노부이로 탐지하였으나, 최근 잠수함의 저소음화 및 수동 센서로는 감지하기에 어려운 천해 배경소음지역 활동 증가로 탐지가 매우 어려워지고 있다. 소노부이의 전술적 운용을 극대화하기 위해 저주파 수중음원을 발생하고 반향음을 수신하여 목표물의 거리 및 방향을 탐지하며 단독 및 양 상태, 다중상태로 운용이 가능한 능‧수동 복합 운용의 소노부이가 개발되고 있다[1].
소노부이는 항공기에서 투하하여 수중에 음향센서를 전개하여 표적의 음향신호를 탐지하고 탐지된 음향신호를 RF(VHF(Very High Frequency) 대역) 신호를 통하여 항공기 또는 함정의 수신체계에 전송하는 일회용 장비이다. 현재 국내에서 사용하는 소노부이는 전량 해외 도입품으로 운용되고 있어, 군 작전요구사항이나 한반도 해역특성 반영이 불가하여 국내개발이 시도되고 있으나, 수신체계는 해외 도입품을 그대로 사용하고 있다.
민군기술협력사업으로 개발되는 저주파능동형 소노부이의 성능검증을 위해서는 기존 소노부이 수신체계를 그대로 사용하기에는 여러 제약사항이 있다. 소노부이의 국내개발 및 검증을 위해서는 수신체계를 대신하는 모의 장비가 필요하며, 수신체계 모의 장비는 추후 국내 개발되는 소노부이 및 수신체계의 기반 기술로 활용이 가능하다. 본 논문에서는 소노부이의 수신체계를 대신하는 통신장치의 설계/제작/검증에 관련된 내용을 기술하고자 한다.
통신장치는 소노부이의 신호 수신 및 운용통제 신호 송신 기능을 담당하며, 개발된 통신장치는 표준화된 소노부이 통신 프로토콜을 적용하였다. 시뮬레이터 및 국내개발 소노부이로부터 RF(VHF 대역) 통신으로 실시간 수신한 음향신호를 자료처리장치로 전송하며, 운용제어를 위한 CFS(Command Function Select)/CSG Command Signal Generator) 명령을 RF(UHF(Ultra High Frequency) 대역) 통신으로 시뮬레이터 및 국내개발 소노부이(이하 LFAS)에 전달하여 통신장치의 검증을 진행하였다.
2. 소노부이 개요
1942년 최초의 수동 음탐부표(AN/CRT-1)가 개발된지 약 20년이 경과된 1961년 최초의 능동 소노부이(AN/SSQ-15)가 개발되었고 이후 다양한 종류의 능‧수동 소노부이가 개발되었다. 그러던 중 수중위협 양상이 원근해에서 천해로, 대형 핵잠수함에서 소형 디젤잠수함으로 위협의 장소와 형태가 변화함에 따라, 미국 및 나토를 중심으로 저주파 능동형 소노부이 개발에 관심과 기술투자가 집중되고 있다. 현재까지는 미국 Sparton사의 AN/SSQ-62F(GPS)와 영국 Ultra사의 AN/SSQ-565가 세계 최고 성능의 저주파 능동형 소노부이로 평가되고 있으며, 미래전에서 네트워크 중심 입체적 협동대잠전 수행을 위해서는 다중상태(Multi-static) 저주파 능동형 소노부이 중심의 기술개발이 당분간 지속될 것으로 전망된다.
Table 1은 국외에서 개발된 소노부이의 제원을 비교한 것이다.
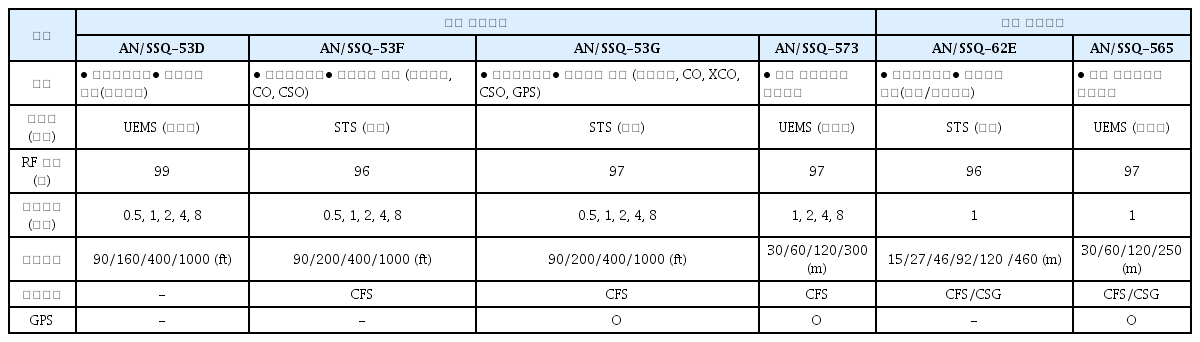
Sonobuoy Specifications developed abroad
수동 소노부이인 AN/SSQ-53 시리즈를 보면 투하전 설정(Electronic Function Select, EFS)만으로 수중물체 탐지를 수행했는데(53D), 효율적인 작전 수행이 가능하도록 투하 후 제어명령 기능(CFS)이 추가되고(53F), 최근엔 정확한 탐지위치 식별을 위해 GPS도 장착되고 있다(53G). 능동 소노부이도 능동센서의 효율적인 운용을 위해 투하 후 제어명령 기능(CFS/CSG)을 사용하고, 정확한 탐지위치 식별을 위해 GPS가 장착되고 있다. 이와 같이 소노부이 개발 시 효율적인 작전운용을 위한 투하 후 제어명령(CFS/CSG) 기능과 정확한 탐지위치 식별을 위한 GPS가 중요시되고 있다.
2.1 LFAS 개요
국내에서 수동 소노부이(AN/SSQ-53D)는 수년전부터 개발 진행 중이나 사업진행이 장기화 되고 있고, 능동형 소노부이는 여러 음원(주파수, Ping형태 등)을 사용하여 높은 탐지효과를 보이나 해외 도입으로 인해 안정‧지속적인 보급이 어려울 수 있다. 대잠전 상황의 변화에 맞춰 민군겸용 사업을 통해 능‧수동 복합 소노부이인 LFAS를 국내 개발하고 있으며, LFAS는 국외제품 중 수동 소노부이(AN/SSQ-53G)와 능동 소노부이(AN/SSQ-565)의 기능을 합친 복합운용의 소노부이다. LFAS의 형상은 Fig. 1과 같다.
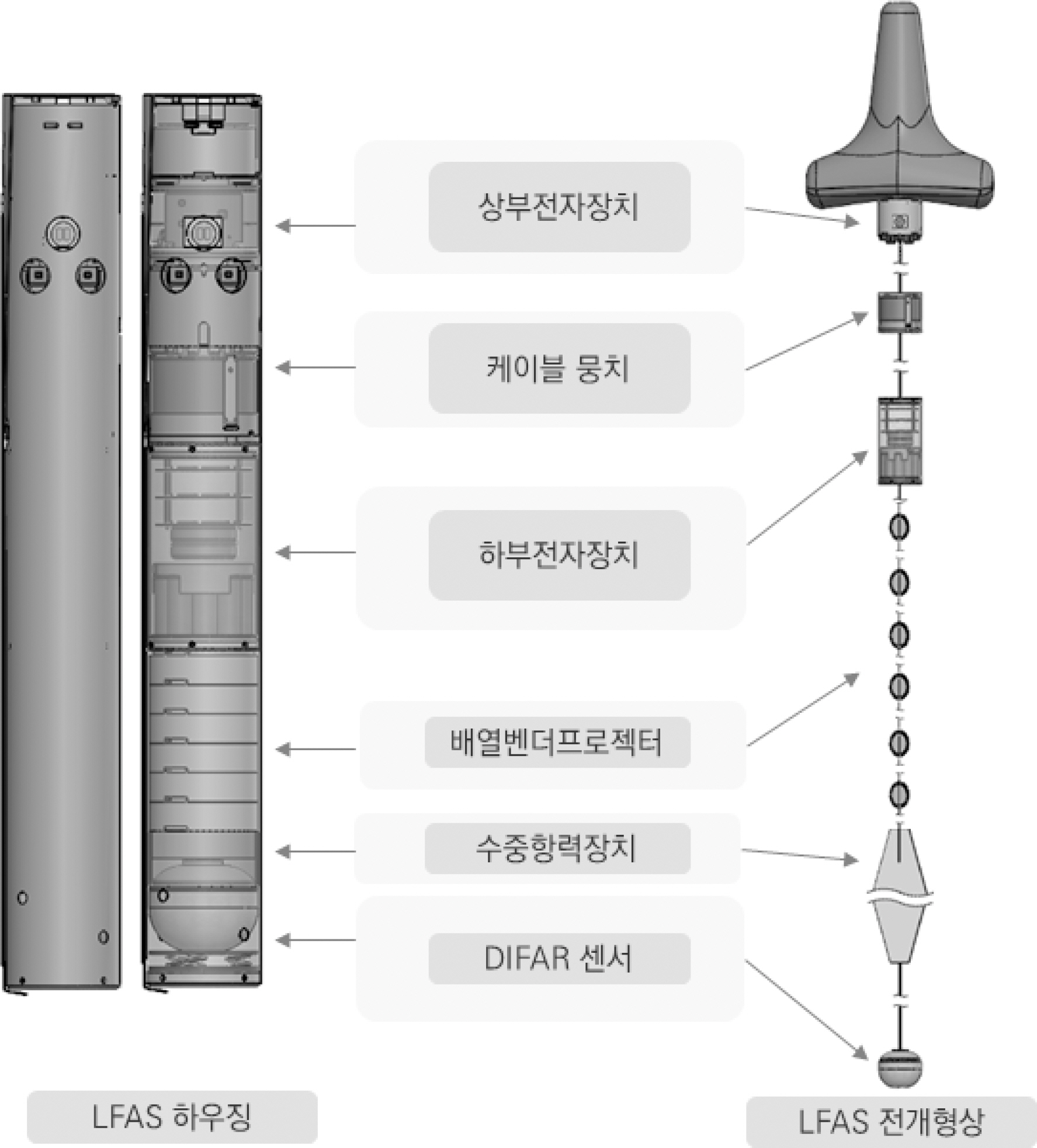
Structure of LFAS
LFAS의 제작 후 기능/성능 검증을 위해서는 음향분석장비의 개발이 필수이며, 음향분석장비 중 신호처리장치와 LFAS 간에 RF 통신을 담당하는 통신장치 개발이 필수적이다. 통신장치는 소노부이의 음향신호 및 GPS 신호를 수신할 수 있는 VHF 수신기와 투하 후 작전 기능 제어를 위한 UHF 송신기가 같이 설계 되어야 하며, 상세내용은 3장에 기술하였다. UHF 송신기는 능‧수동 소노부이의 운용 제어를 위하여 CFS 및 CSG 송신 기능을 모두 갖추고 있다.
CFS 명령어는 소노부이 투하 후에 작전 기능을 선택하는 것으로 UHF 대역의 RF 신호(반송파)에 12 words의 디지털 신호를 FM 변조를 통하여 전송한다. 12 words의 디지털 신호로 명령어를 전달하기 때문에 다양하고 세분화된 명령어를 전달할 수 있고, 명령은 운용수명, RF 채널, AGC, 센서타입, GPS 제어, Ping control(전체) 등의 명령을 전송할 수 있다.
CSG 명령어는 RF 신호(반송파)에 tone 신호를 AM 변조를 통하여 전송한다. tone 신호를 통하여 제어 명령을 구분하기에 간단한 명령어만을 전달할 수 있고, 명령은 Scuttle, Depth, Ping control(일부)의 명령을 전송할 수 있다.
3. 통신장치 설계
국내 개발 중인 LFAS와의 실시간 다중 통신을 위하여 통신장치는 Fig. 2와 같이 소노부이와의 RF 통신을 위한 RF 통신부, RF 신호처리를 위한 SDR(Software Defined Radio) Platform, 동작 및 연동제어를 위한 SBC(Single Board Computer), 통신장치 내부의 전원 제어를 위한 전원부, 동작 상태를 확인하기 위한 전시장치로 구성되도록 설계하였다.
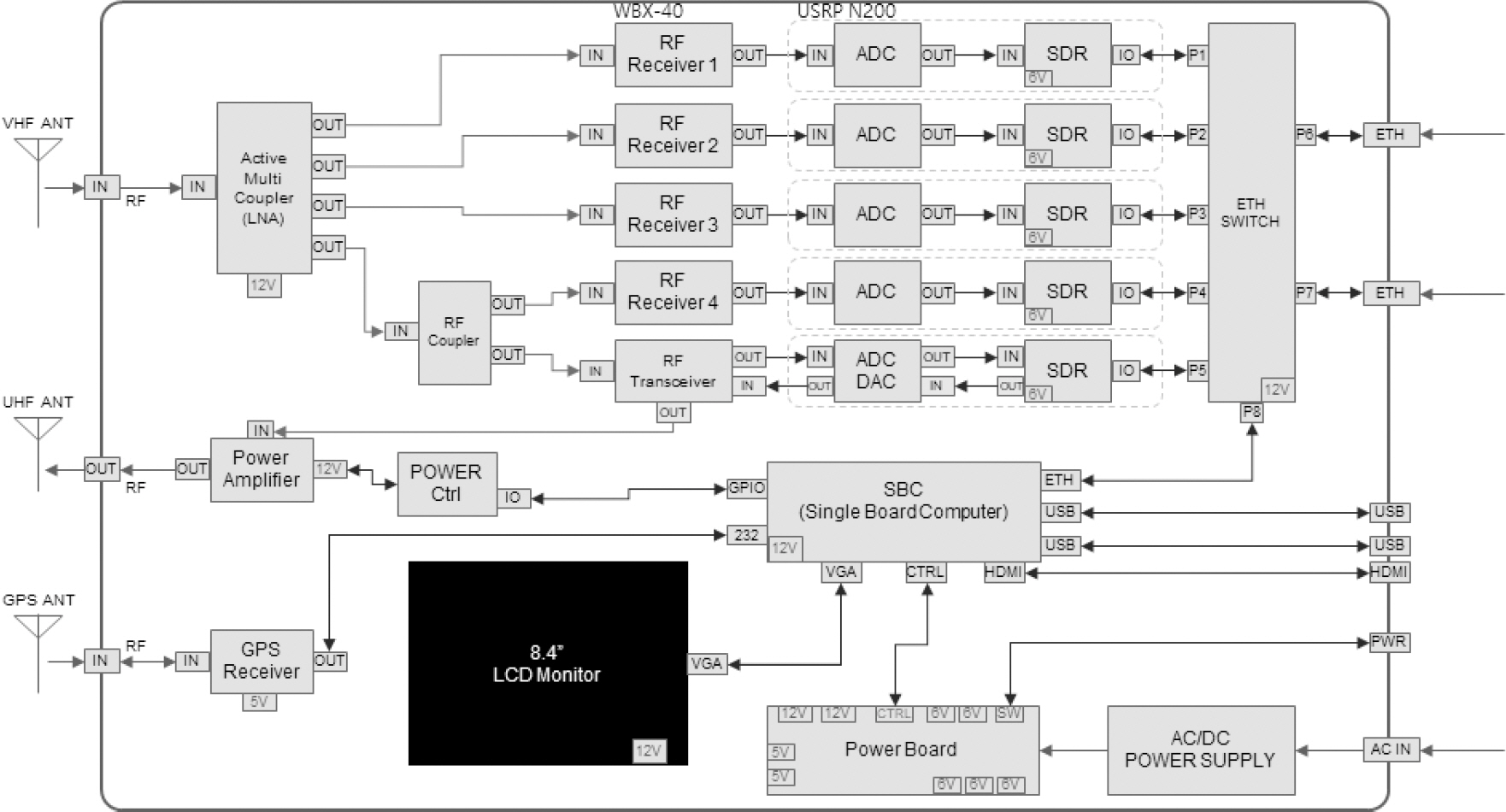
Transceiver unit component
수중 표적의 정확한 탐지를 위해서는 여러 개의 소노부이를 동시 운용 가능해야 하므로, 통신장치는 여러 채널의 소노부이 RF 신호(VHF 대역)를 수신하기 위해서 RF 통신부에 Multi Coupler를 설계 반영하였고, 설계 사양은 Table 2와 같다.
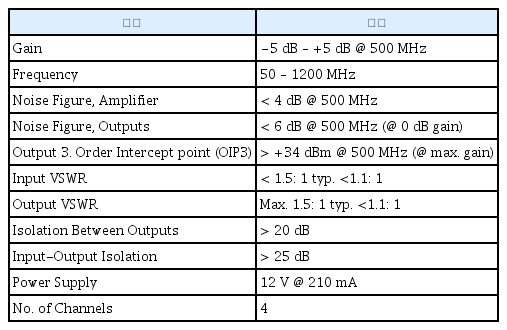
VHF multi coupler design specification
또한 통신장치의 RF 통신부는 자료처리장치에서 수신한 제어 신호를 RF신호로 변환하여 UHF 안테나로 제공하며, VHF 안테나로부터 수신된 RF 신호를 SBC 로 제공한다. 이를 위해서 RF 통신부에는 VHF 수신기 및 UHF 송신기를 설계 반영하였고, 설계 사양은 Table 3과 같다. 통신장치 내부에서 VHF 수신기 및 UHF 송신기의 장착 위치 및 제작 형상은 Fig. 3과 같다.

VHF receiver and UHF transceiver design specification
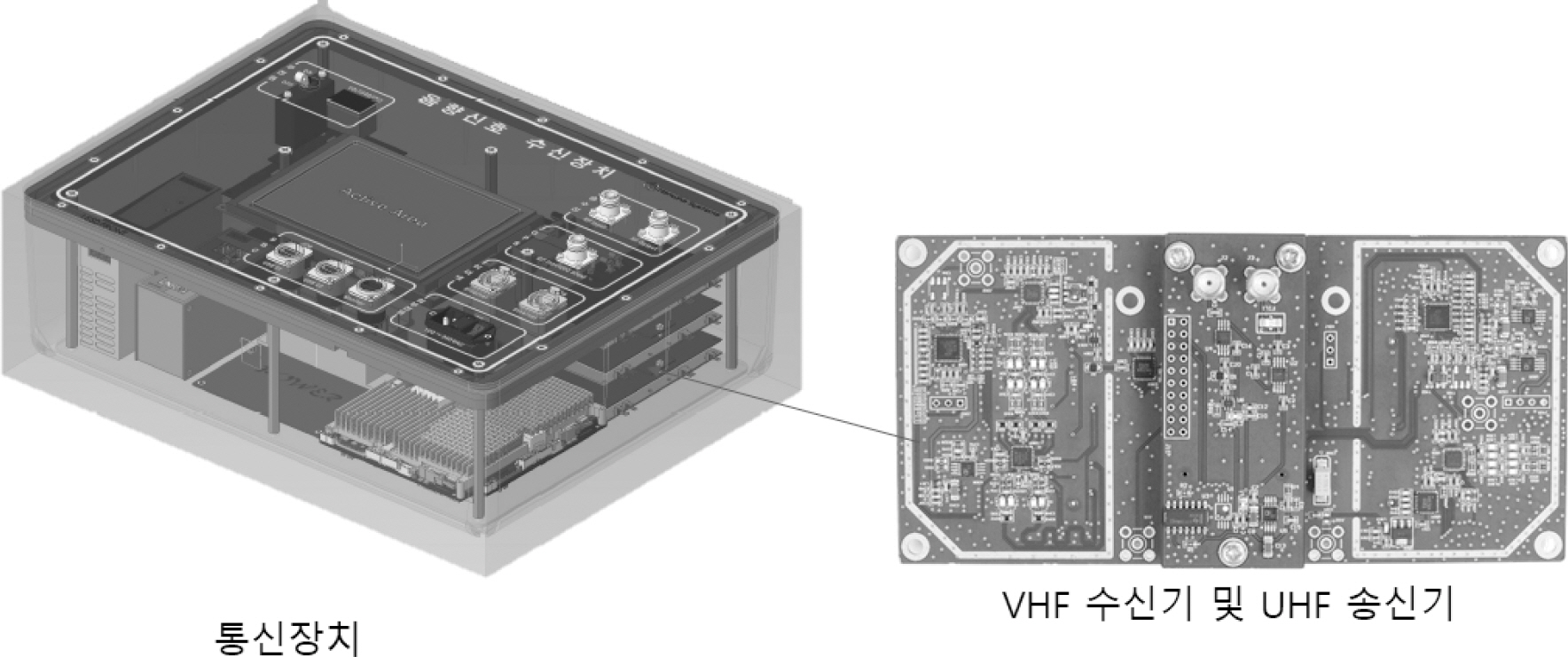
VHF Receiver and UHF transceiver production model
SDR Platform은 UHF 송신기, VHF 수신기로부터 수신되는 I, Q 신호를 수신하여 복조 및 데이터 복원을 지원하는 보드이다. UHF 신호는 소노부이의 운용채널/AGC 모드/GPS 등을 제어하기 위한 CFS 신호이며, 291.4 MHz의 반송파 주파수(Carrier Frequency)에 FSK 변조방식을 사용하여 신호를 생성한다. CFS 명령어 구조는 Table 4, Fig. 4와 같다.

CFS command structure
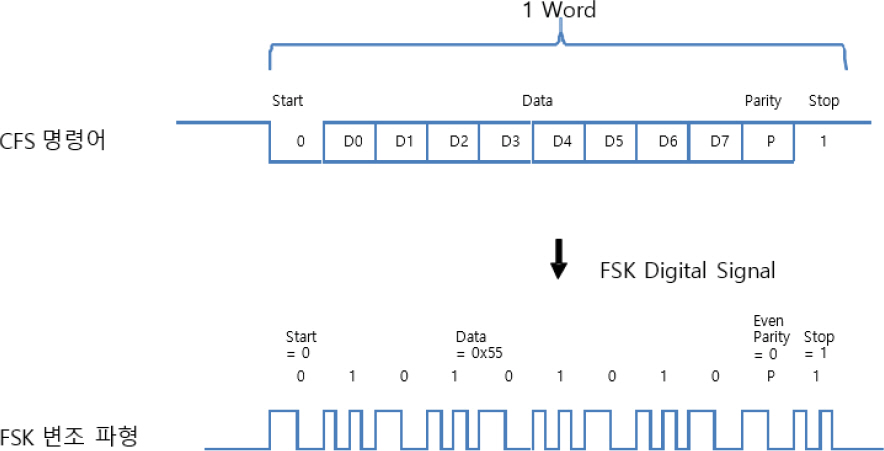
FSK modulation of CFS command
VHF 신호는 소노부이로부터 수신되는 DIFAR 센서 신호이며, 136 ∼ 173.5 MHz 대역의 반송파 주파수에 Fig. 5와 같이 omni, cosine, sine의 음향신호가 변조되어 전송된 신호를 복조하게 된다.

DIFAR signal multiplexer of sonobuoy
SDR Platform의 장착 위치 및 제작 형상은 Fig. 6과 같다.

SDR platform production model
전원부는 통신장치의 안정적인 전원 공급을 위한 전원보드조립체와 각 장치에 전원공급을 위한 도선으로 구성된다. 이중 전원보드조립체는 AC전원(220V AC)을 입력받아 통신장치 내부에 필요한 +5V/+12V의 DC전원으로 변환하는 기능을 제공한다. 변환된 전원의 전원 흐름도는 Fig. 7과 같다.
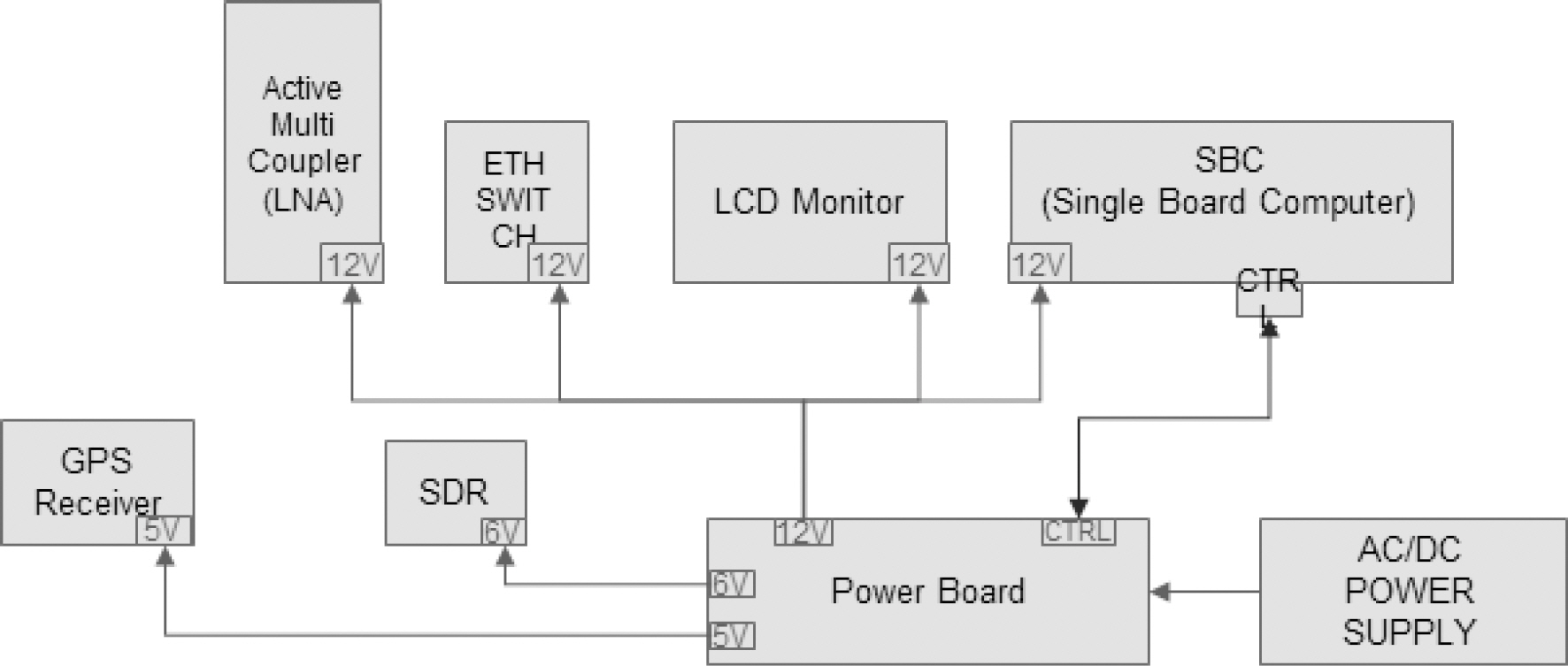
Flow chart of power board
전원보드조립체의 장착 위치 및 제작 형상은 Fig. 8.과 같다.

Power board production model
통신장치 각 구성품은 추후 확장성을 고려하여 모듈화 설계를 진행하였고, 시험 및 운용 편의성을 고려하여 휴대용 케이스 내부에 배치하였다. 통신장치의 조립 완성된 형상은 Fig. 9와 같다.

A Transceiver unit production model
4. 통신장치 검증시험
4.1 소노부이 표준 통신 검증시험
통신장치와 LFAS 실 장비와 연동을 위해서는 사전에 소노부이의 국제표준 통신방식에 호환되는 설계가 이루어 졌는지 확인해야 한다. 사전 연동검증은 Ultra Electronics 社의 Test Set Portable Acoustic Sonobuoy Simulator-II(이하 “PASS-II”)와 자료처리장치의 SW가 탑재된 PC를 활용하여 국제표준의 소노부이 통신방식으로 연동되는지 수행하였다.
음향신호 수신(VHF 대역) 검증을 위해서는 Fig. 10과 같이 모의신호 생성 및 RF 전송(PASS-II) → RF 수신 및 복원 및 Ethernet 전송(통신장치) → 신호처리 및 화면 전시(자료처리장치)의 과정이 필요하다.
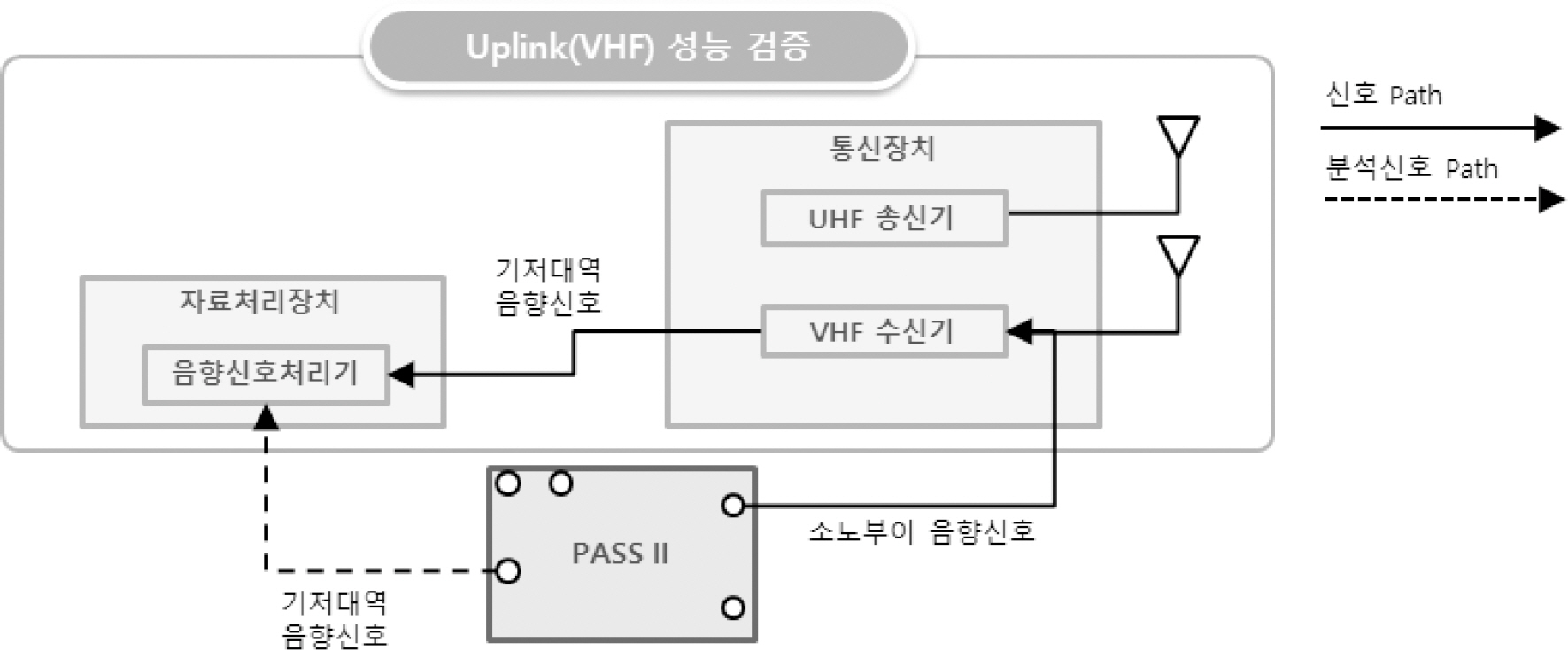
Uplink(VHF) verification block diagram
제어명령 송신(UHF 대역) 검증은 Fig. 11과 같이 제어 메시지 전송(자료처리장치) → 제어 메시지 수신 및 UHF 대역 RF 전송(통신장치) → RF 수신 및 제어 메시지 확인(PASS-II)의 과정이 필요하다.
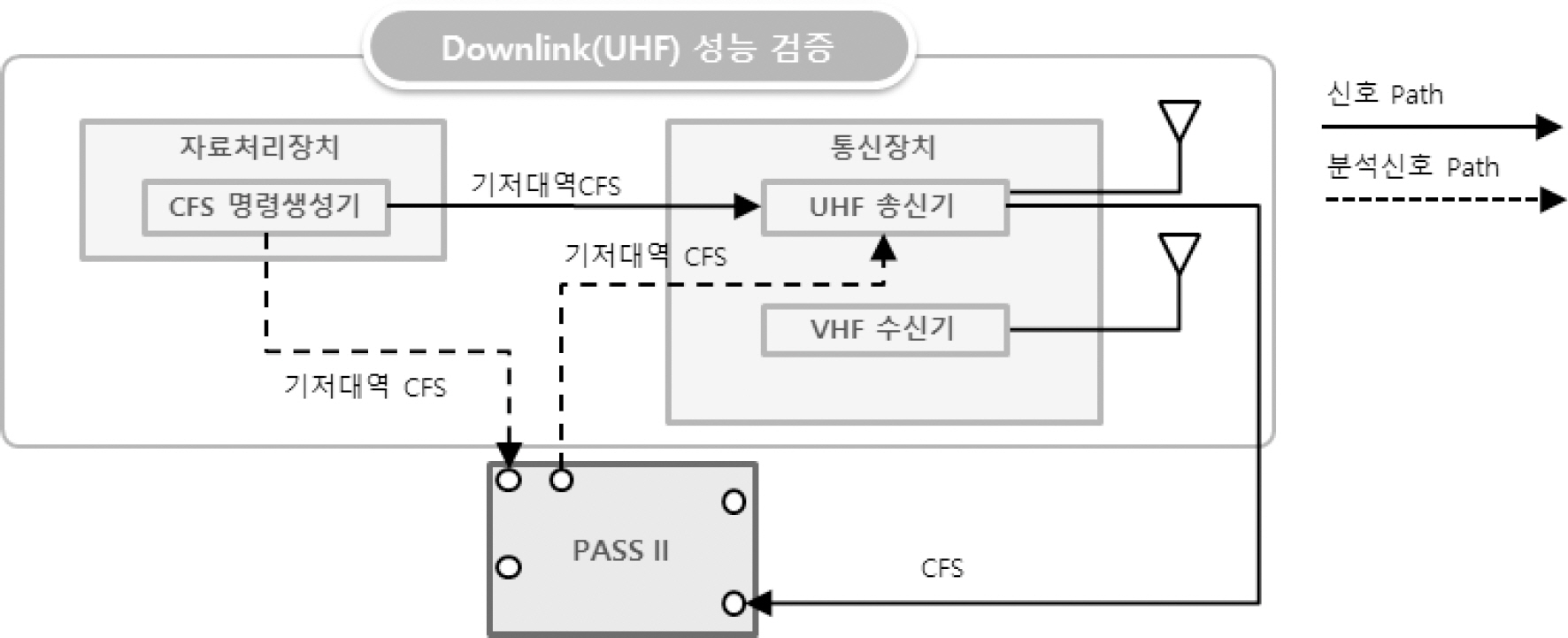
Downlink(UHF) verification block diagram
연동 검증을 위해서 Fig. 12.와 같이 자료처리장치와 통신장치 간에는 1Gbit Ethernet, PASS-II와는 RF 통신으로 연동하여 시험 구성을 하였고, 소노부이의 음향신호 수신은 자료처리장치에서 제어명령 송신은 PASS-II에서 확인한다.

Interface verification test configuration
음향신호 수신 연동 확인은 PASS-II에서 모의 표적신호(임의의 주파수 및 방위정보)를 생성하여 RF신호(VHF 대역)로 변조하여 전송하면 RF 신호를 수신하여 복조 후 Fig. 13과 같이 자료처리장치로 왜곡 없이 전송하는지 검증하였다.
Acoustic signal reception linkage verification test result(in Data processing device)
소노부이의 운용통제를 위해서 제어 명령 전송 메시지는 다음과 같다.
1) CFS 제어 명령
– RF 채널, AGC, Depth, Life, SONIC Channel, Ping Type
2) CSG 제어 명령
– Scuttle, Depth, SONIC Channel, Ping Type
상기의 제어 명령을 자료처리장치에서 전송하고 통신장치를 통해서 최종 PASS-II에서 수신된 메시지와 일치성을 검증하였다.
4.2 LFAS 통신 검증시험
통신장치와 PASS-II의 연동 시험을 통해서 소노부이 국제표준의 통신 연동에 대해서 검증을 하였고, 국내 개발 중인 LFAS와의 2차 연동 시험을 진행하였다. 2차 시험 구성은 연동검증에 사용된 PASS-II 대신에 개발 중인 소노부이의 구성품인 전자장치, 소노부이 제어장치, 모의 신호 발생기를 Fig. 14와 같이 구성하였다.

System linkage test configuration
2차 시험에서는 1차 시험에서와 동일하게 음향신호 수신(VHF 대역) 검증을 위해 모의신호 생성 및 RF 전송(LFAS 전자장치 및 신호발생기) → RF 수신 및 복원, Ethernet 전송(통신장치) → 신호처리 및 화면 전시(자료처리장치)의 과정, 운용통제 검증을 위해 제어 메시지(UHF 대역) 전송(자료처리장치) → 제어 메시지 수신 및 RF 전송(통신장치) → RF 수신 및 제어 메시지 확인(LFAS 전자장치)의 시험을 수행하였다. 음향신호 수신 검증 시험은 LFAS 전자장치를 임의의 채널로 설정하여 통신장치에서 채널탐색이 되는지 확인하고, 신호발생기에서 신호(임의의 tone 주파수)를 발생시켜 LFAS의 전자장치에서 수신하여 RF 신호로 통신장치에 전송한다. 수신한 데이터를 복조하여 왜곡 없이 자료처리장치로 전송하는지 확인하였다. 표적의 방위정보는 소노부이 제어장치를 통해서 임의의 표적방위를 설정하여 확인하였다. 운용통제 검증은 소노부이조립체가 아닌 전자장치만을 가지고 시험을 진행하였기에 채널변경 제어만을 실제 동작 시험을 하였고, 나머지 명령에 대해서는 자료처리장치에서 전송된 제어 메시지를 LFAS 전자장치에서 수신한 메시지와 동일한지 확인하였다.
5. 운용시험
운용 시험은 운용 모의 환경 또는 실 환경에서 수행되며, 운용 모의 환경시험 중 환경시험은 수명주기 중 노출될 수 있는 환경조건을 고려하여 시험한다. 본 논문에서 운용시험은 환경시험, 수조 시험, 해상 시험을 통하여 국내 개발품인 LFAS의 완성품을 가지고 운용환경 하에서 성능시험을 수행하였다.
5.1 환경시험
소노부이의 환경시험은 온도, 습도, 진동, 충격 등 소노부이의 운용‧저장 시 환경에 대한 다양한 시험을 수행한다. 그러나 본 논문에서 다루는 통신장치는 소 노부이의 운용 시에만 사용되므로 소노부이의 운용 상태에서 수행하는 온도(작동) 시험에 대해서 기술하였다.
온도 시험은 소노부이의 고온‧저온의 동작온도 조건하에서 통신장치를 통한 운용제어(채널 변경)와 음향신호 수신 점검을 수행하였다. Fig. 15의 상단과 같이 온도 챔버내에 소노부이를 배치하고, 소노부이와의 RF 통신을 위하여 외부에 통신장치를 배치하였다. 온도 시험결과 Fig. 15의 하단과 같이 채널 검색 및 변경(좌측)과 음향신호 수신(우측)이 이상 없이 수행되었음을 확인하였다.

Temperature test configuration and test result
5.2 운용시험
5.2.1 수조 운용시험
통신장치의 주요 기능은 소노부이의 운용 상태를 변경하는 제어명령 송신과 소노부이에서 송신된 음향신호를 수신하는 기능이다. 두 기능의 정확한 시험 결과 확인을 위하여 제어명령 송신 시험과 음향신호 수신시험을 구분하여 수행하였다.
통신장치의 제어명령 송신 시험은 소노부이의 동작 상태를 모니터링하기 위하여 수조 환경 하에서 LFAS 를 전개시켜 수행하였다. 시험 구성은 Fig. 16과 같이 통신장치를 통한 제어명령이 LFAS에 전달되고 명령한 대로 운용되는지 자료처리장치 또는 별도 음향센서에서 확인하였다.
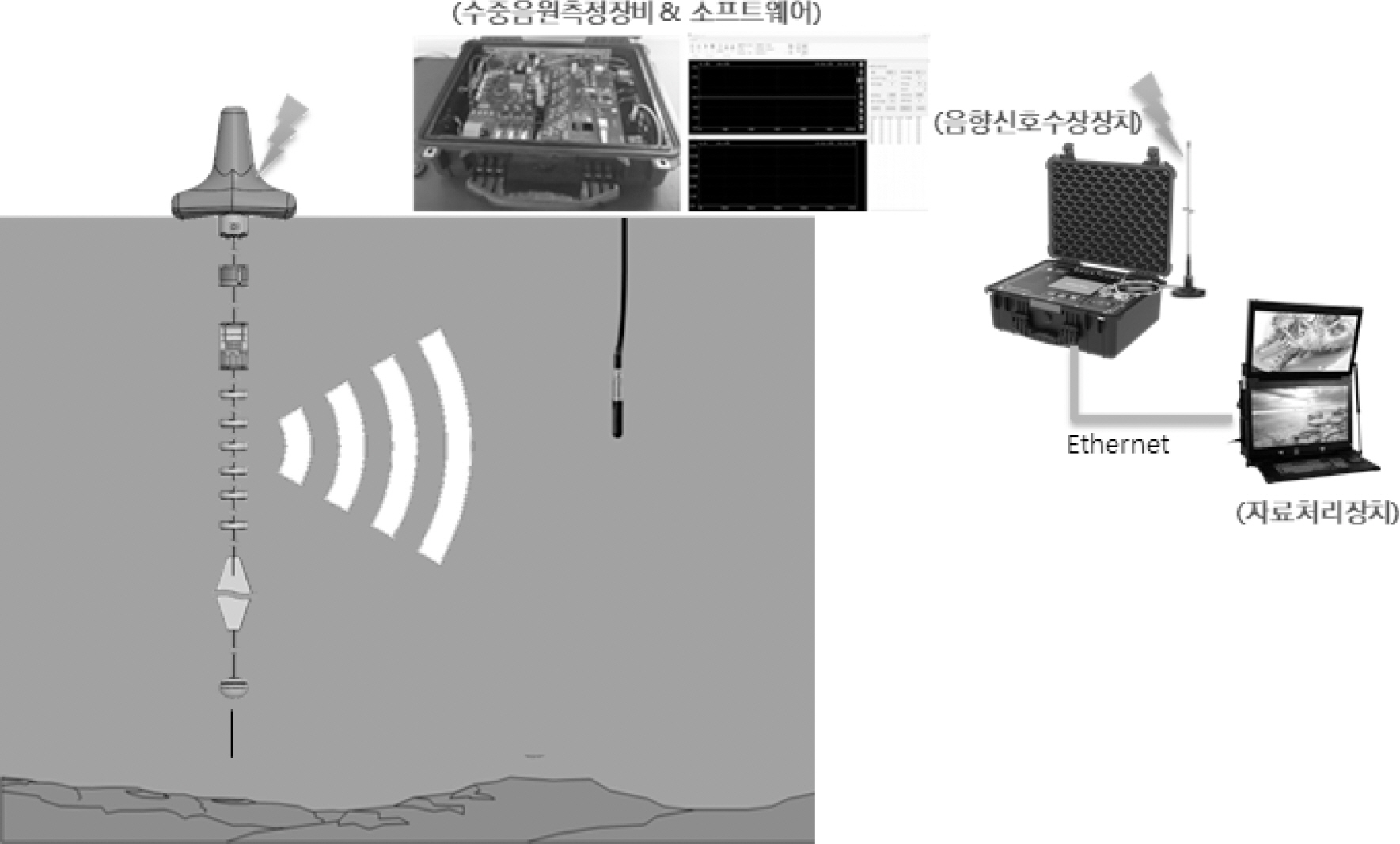
Operation control test configuration
운용제어 명령은 수조 환경을 고려하여 실제 동작 가능한 명령을 선정하여 운용채널 변경, 음향신호 송신 제어, GPS on/off 명령을 수행하였다. 소노부이는 136 MHz ∼ 173.5 MHz의 주파수 범위에서 99채널로 운용된다. 통신장치를 통해서 소노부이가 운용중인 채 널에서 1 ∼ 99번의 임의의 채널로 변경하는 제어명령을 송신 시 소노부이에서 변경된 채널로 주파수를 변경하여 송신하는 것을 확인하였다(Fig. 18).
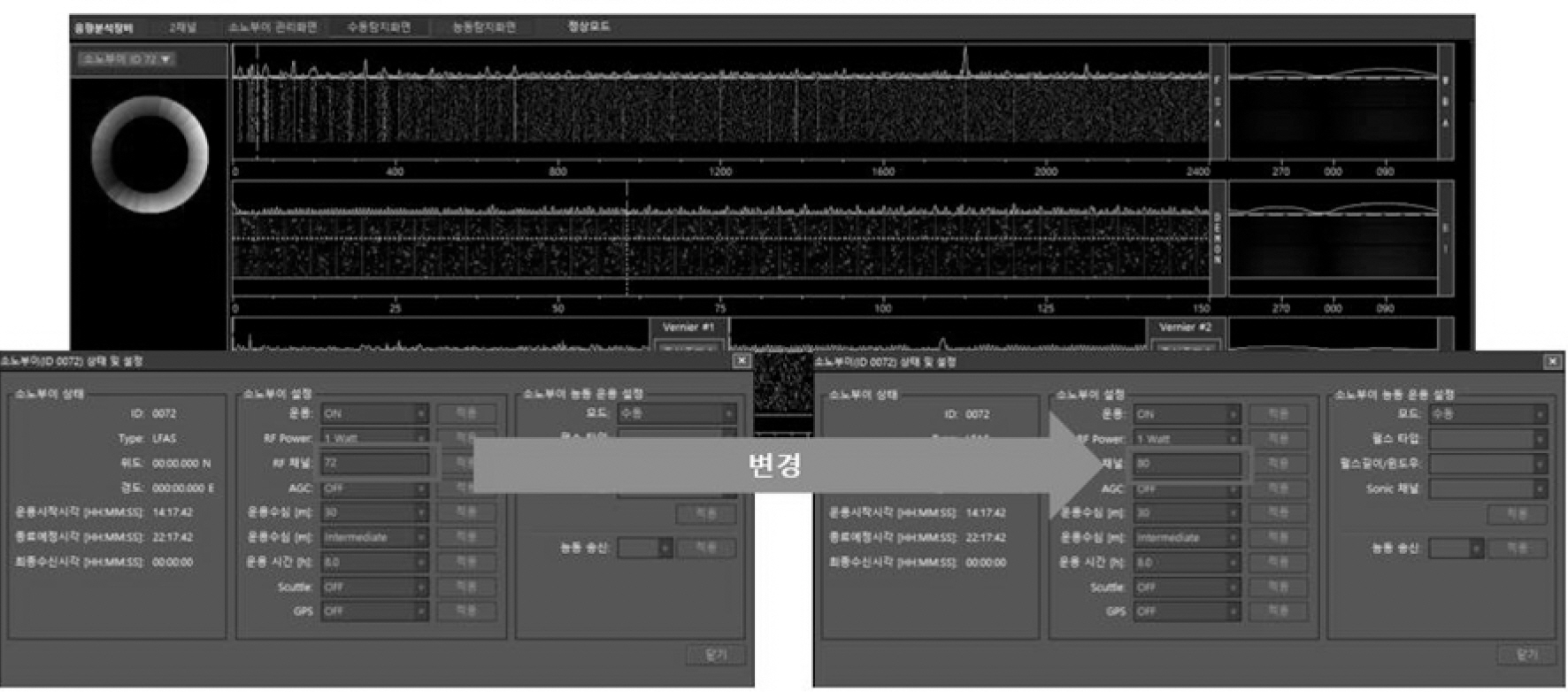
Operation control test result(Operation channel change)

Operation control test
또한 LFAS는 송신 센서를 같이 운용하는 양상태 소노부이로 송신센서에서 송신 파형을 제어명령을 통하여 제어할 수 있다. LFAS는 음파 송신 시 수신기능이 동작하지 않아서 음파 송신 시험 시 외부에 수중청음기 및 수중음향 측정 장비로 기능 동작을 확인하 였다. Fig. 19와 같이 FM UP / 1800 Hz / 2 s(상단), CW / 1800 Hz / 2 s(하단)로 설정할 경우 그림의 우측과 같이 제어명령에 의해 LFAS에서 송신된 음향신호가 외부 수중청음기에서 수신됨을 확인하였다.
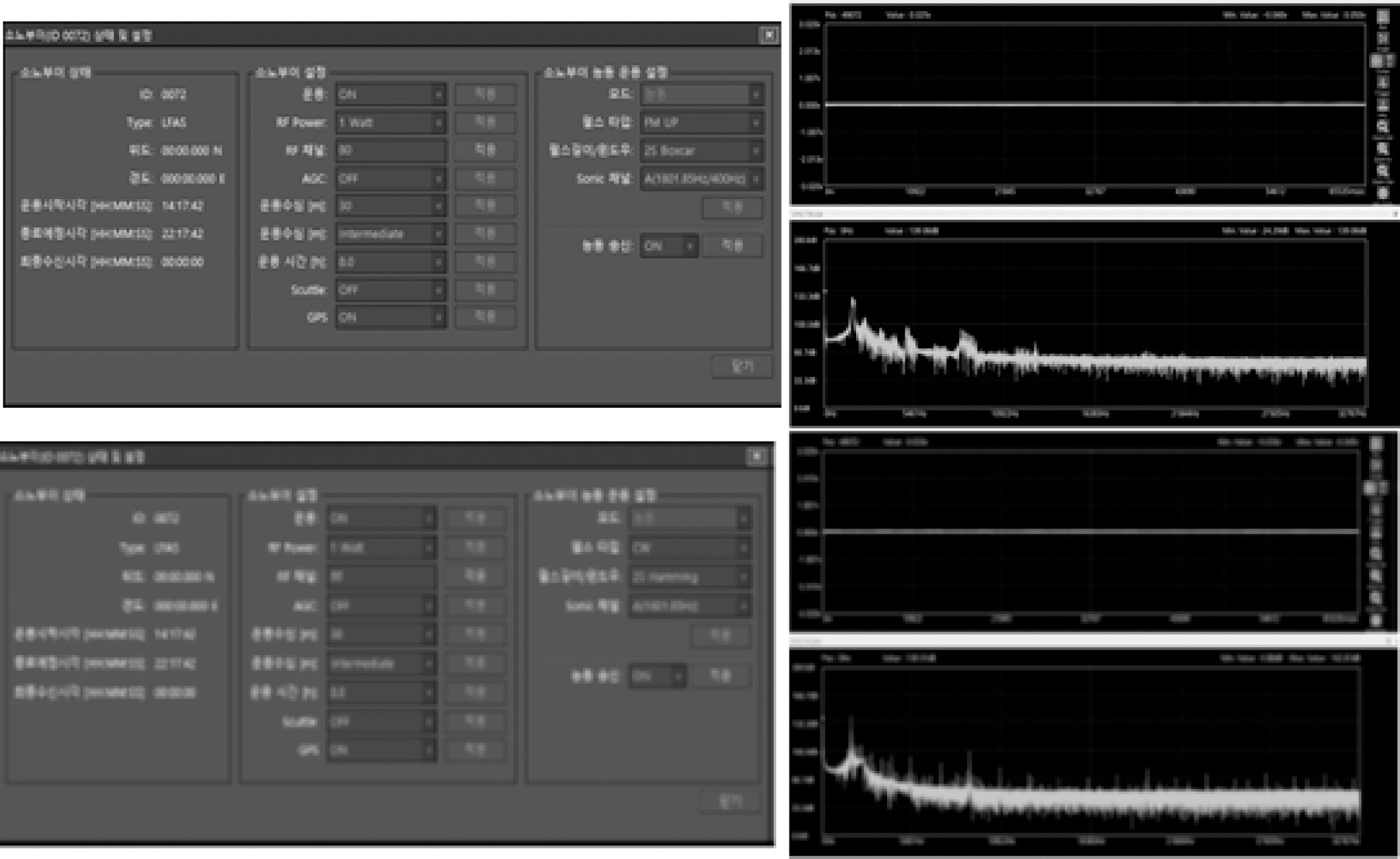
Operation control test result(Acoustic signal transmission)
소노부이에 내장된 GPS는 제어명령에 따라서 동작 상태를 on/off 할 수 있다. 소노부이는 GPS 동작 시 음향신호와 함께 변조되어 송신한다. 통신장치를 통한 GPS 제어명령에 따라서 Fig. 20과 같이 GPS on 명령을 송신하면 GPS 신호가 음향신호와 같이 변조되어 송신되고, GPS off 명령을 송신하면 소노부이 신호에서 GPS 신호가 없어지는 것을 확인하였다.
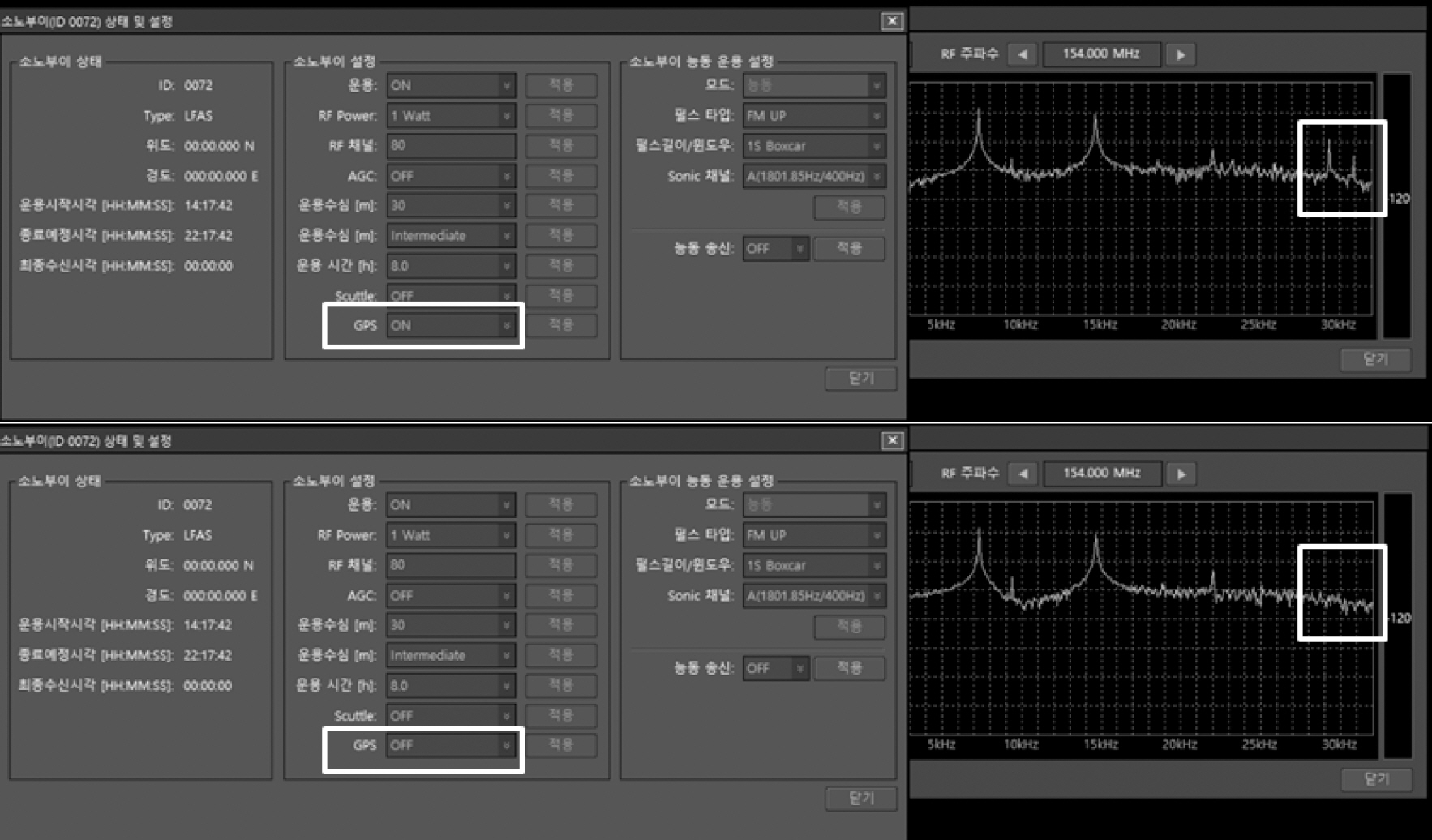
Operation control test result(GPS on/off)
5.2.2 해상 운용시험
통신장치의 주요 기능중 하나인 음향신호 수신 시험은 노부이가 실제 운용되는 해상환경 하에서 수행하였다. 시험은 2020년 11월에 Fig. 21과 같이 동해상(포항영일만항 북동쪽 36 km / 55 km 지점) 수심 약 200 m 해역에서 수행하였다. LFAS는 능동 음원을 발생하여 수중표적에서 반향되는 신호를 수신하는 양상태 소나체계이나 표적 모의가 힘들어 송신 신호가 목표거리에서 수신되는지에 대한 성능확인 시험을 수행하였다.

Sea operation test area
LFAS의 운용수심은 30 m, 60 m, 120 m, 280 m로 정해져 있고, 시험해역의 수심이 280 m가 안되어 Fig. 22와 같이 200 m 이하의 운용수심에 대해서 음파 전달손실을 계산한 결과 120 m 운용 시 가장 멀리 전달되는 것을 확인하여 해상 운용시험 시 120 m로 운용하였다.
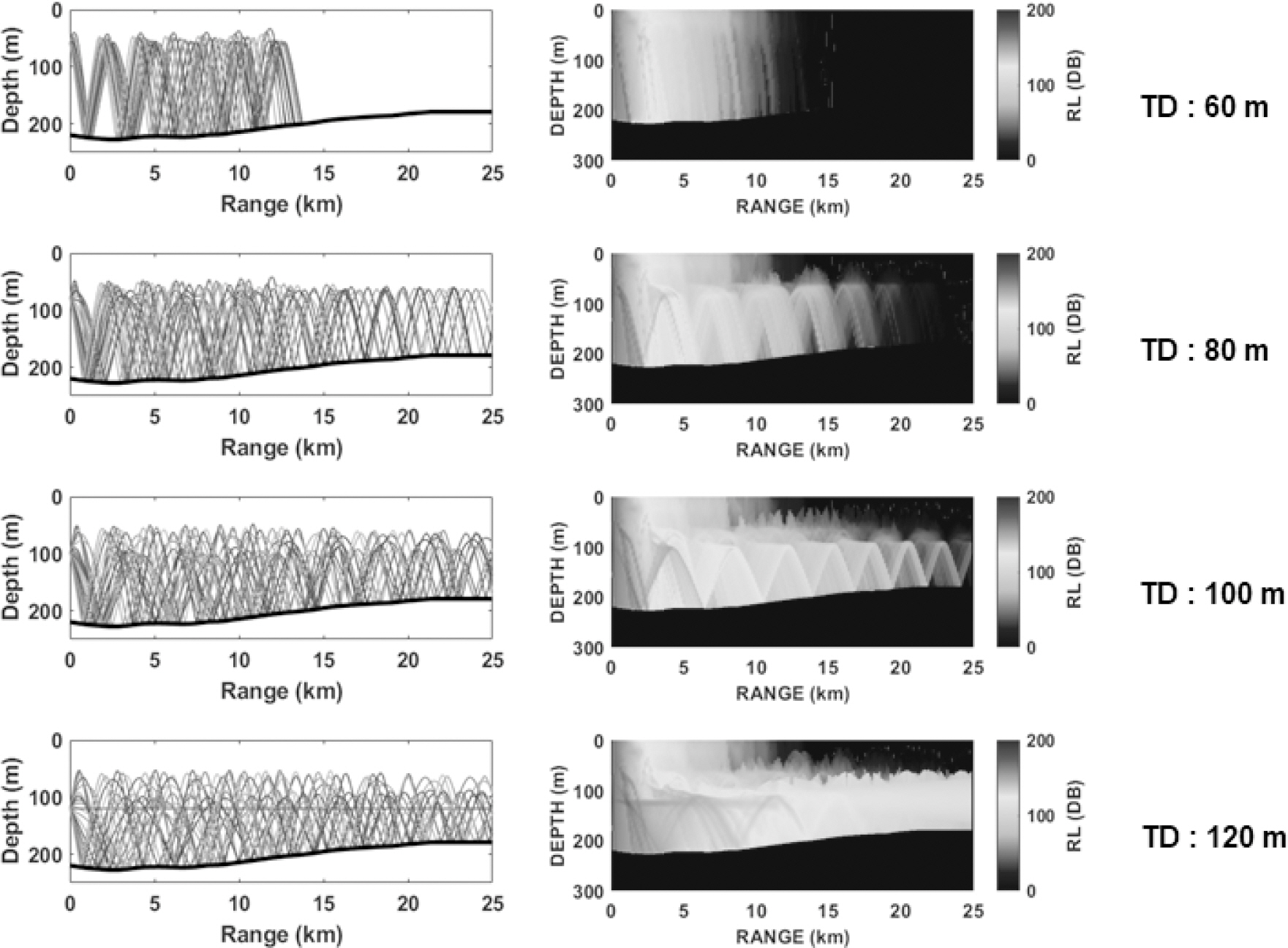
Transmission loss field of 1800 Hz (simulation)
해상 운용시험은 Fig. 23과 같이 2척의 시험선에 송신부와 수신부로 나누어 각각 운용하였다. 송신부에서는 송신 음향센서를 120 m 수심에 위치시키고, 1800 Hz의 CW 신호를 2 s 송신, 10 s 대기로 동작하도록 설정하였고, 수신부에서는 수신 센서를 120 m 수심에 위치시키고 실시간 측정을 할 수 있도록 설정하였다.

Sea operation test
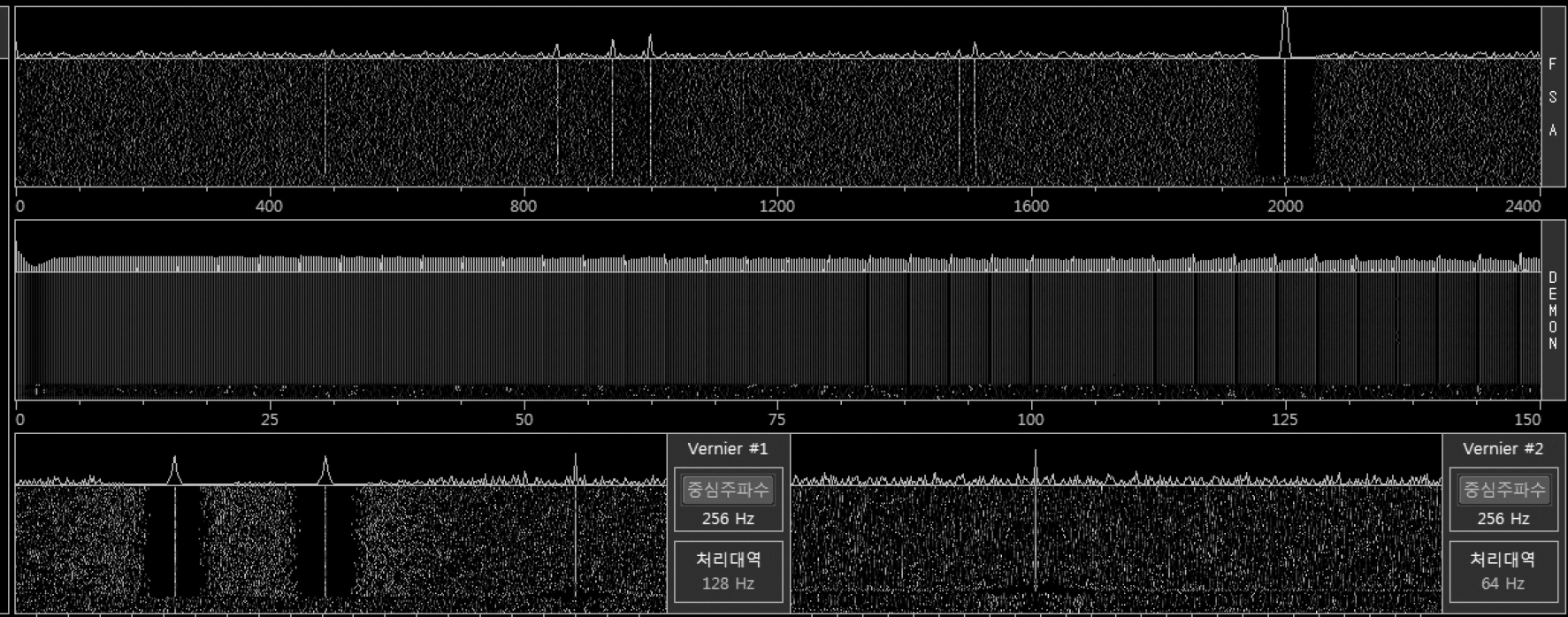
통신장치의 음향신호 수신시험 결과 Fig. 24의 상단과 같이 송신부의 음향센서가 동작하지 않을 경우(대기상태)는 수중 노이즈 및 선박 소음이 수신되고, 송신부의 음향센서가 동작할 경우(송신 상태)는 Fig. 24의 하단과 같이 수증 노이즈 및 선반 소음 수신 상태에서 송신부에서 송신하는 1800 Hz 성분의 신호가 같이 측정되는 것을 확인하여 통신장치가 소노부이에서 송신한 음향신호를 왜곡 없이 수신하는 것을 확인하였다.

Acoustic signal received by the sonobuoy
6. 결 론
본 연구에서는 LFAS의 국내 개발을 통해 소노부이의 수신체계를 모의하는 통신장치를 설계, 제작, 검증에 관련된 내용을 기술하였다. 통신장치는 소노부이 제어에 사용되는 CFS 명령어를 UHF 대역의 RF 신호로 FSK 변조방식을 사용하여 전송하도록 설계/제작하였고, 소노부이에서 수신되는 음향신호를 VHF 대역의 RF 신호로 FM 복조방식을 사용하여 수신되도록 설계/제작하였다.
개발된 통신장치는 소노부이 원 제작사에서 제공하는 시뮬레이터를 통하여 소노부이와 국제표준 방식의 통신방식을 검증하여 UHF 대역의 제어신호 및 VHF 대역의 음향신호에 대한 호환성을 검증하였다.
또한 RF 채널, 능동센서 동작제어, GPS on/off의 CFS 제어기능 동작을 운용시험으로 검증하였고, 수조시험 및 해상시험을 통하여 음향센서의 수신 기능과 방위 추정 기능을 검증하였다.
추후 소요군 운용성 검증을 마치면, 해군 작전개념에 적합한 항공/함정 협력 대잠전체계 구축의 기반기술로 활용 및 민/군 기술이전 분야 발굴을 통해 해양탐사, 주변소음 측정, 수중통신 분야 등 민간분야 활용이 가능할 것으로 예상된다.
후 기
본 논문은 민군기술협력사업(저주파 능동형 소노부이 개발)의 지원으로 수행되었습니다.