전투체계를 위한 표적 및 주변소음 모델링을 통한 어뢰소나 표적탐지 시뮬레이션 연구
A Study on the Torpedo Sonar Simulation for Combat System by Modeling Target and Noise
Article information
Abstract
In environment of torpedo firing, underwater acoustic signal is generated by target and noise. Sound wave which is generated from acoustic signal is propagated by seawater and it is received through the sonar(sound navigation and ranging) system mounted on torpedo. In the ocean, acoustic signal or sound wave from target that is generated by the spread of broadband can be attenuated by ambient noise and can be lost by medium and environment. This research is designed to support teamwork training in Naval operations by constructing a simulation system that is more similar to the real-world conditions. This paper attempts to research the modeling of target detection and to develop the simulation of torpedo sonar(TOSO). In order to develop the realistic simulation, we researched the broadband sound modeling of target and noise source, the modeling of acoustic transmission loss by chemical component of seawater, and the modeling of signal attenuation by ambient noise environment which is approximated by experimental measurements in seawater surrounding the Korea Peninsular and by experience of Navy’s actual torpedo firing. This research contributed to constructing more practical simulation of torpedo firing in real time and the results of this research were used to develop a teamwork training system for the Navy and their education.
1. 서 론
잠수함 운용군의 어뢰발사 팀웍훈련은 실제 잠수함 작전 운용 및 훈련탄 어뢰발사훈련의 원활한 실현을 위해 실제 해상환경에 근접한 모사기능을 기반으로 반복훈련을 통해 습득될 수 있어야한다. 이는 함 외 육상시험체계가 구축된 전술훈련장에서 잠수함이라는 공간적인 제약 없이 수행되어야하며, 함 내 모의훈련 기능을 통해 작전 운용 중에도 시간적인 제약 없이 수행될 수 있어야하는 운용군의 요구에 기반한다. 이를 위해 전술훈련장은 함 내 두뇌역할을 하는 통합형 전투체계 장비와 센서 및 무장을 대체, 모사하는 시뮬레이터가 구축되어 있어야하며 함이 작전 운용 중에도 제약 없이 팀웍훈련을 통한 반복 운용습득을 위해 전투체계의 전술운용 중 모의훈련 기능과, 시뮬레이션 영역에서 모의 전투체계와 연동되는 센서 및 무장에 대한 모사 기능이 요구된다.
Fig. 1은 어뢰발사 시뮬레이션의 전체 구성을 나타낸다. 유선유도 어뢰에서 전투체계와 연동하는 전기적 신호, 어뢰의 움직임, 어뢰 구성품인 탐색기의 움직임, 탐색기에 장착된 음향신호 감응 센서 인 어뢰소나, 그리고 어뢰소나의 탐지결과로부터 어뢰와 표적의 3차원 위치를 토대로 명중 판정을 모사하는 구조로 구성하였다. 본 논문은 이 중 어뢰소나 표적탐지 모델 연구이다.

Torpedo simulation structures
수중음향신호의 전파와 탐지에 관한 소나 신호 특성 및 모델링 연구는 다년간 축적되어왔으며 연구 목적과 기술수준에 따라 다양한 모델이 개발되었다[1,2].
어뢰가 운용되는 실제 해상환경은 해수 매질을 통해 어뢰소나로부터 표적 간 표적의 소음원이 전파되는데, 표적으로부터 발생하는 소음원은 어뢰까지 손실없이 전파될 수 없고 매질의 화학적 특성에 따라, 그리고 해상환경에 공존하는 주변소음 및 기동하는 어뢰의 자체소음 등에 따라 전달되는 신호의 감쇄가 일 어나 어뢰의 표적탐지 여부 및 탐지거리에 영향을 미치게 된다.
본 연구의 목적은 전술훈련장 및 함 내 모의훈련 기능에 탑재되는 어뢰발사 시뮬레이션 개발에 있어서 이처럼 보다 실제적인 해상환경을 고려하여 모사함으로써 실제 유선유도 어뢰 발사 후 운용절차를 훈련에 접목하고자하는 운용군의 요구사항 및 경험을 기반으로 한 어뢰소나 음향 표적탐지 모델링 방안을 제시함에 있다.
본 연구에서는 음원세기와 준위의 관계 및 소나방정식으로 정립되는 수중음향신호 전달 및 탐지 이론을 기반으로 제 2장에서는 보다 실제적인 해상환경을 고려하여 표적탐지 변별력을 개선시키기 위한 표적과 잡음의 광대역 주파수 신호 생성 방법을 제시한다.
이를 위해서 여러 전달손실 모델 가운데에서 기본적인 물리적 전달손실 모델과 잠수함 및 어뢰가 운용되는 해수를 구성하는 화학성분의 특성을 고려한 화학적 전달손실 모델을[4] 선정하여 이를 광대역에 걸쳐 표적신호를 생성해내는 방법을 제시한다. 또한, 표적의 광대역 음원의 전파에 감쇄요인이 되는 주변 환경에 대한 사실적인 모사를 위해 주변 환경 소음을 한국 해양에 적합한 모델로 근사화하고자 하였으며,[5,6] 어뢰의 기동에 따른 자체소음 모델링을 추가로 연구하여 최종 표적 및 주변소음에 대한 광대역 음향신호 모델링을 통한 보다 실제적인 어뢰소나 표적탐지 모델을 제시한다.
제 3장에서는 본 연구를 통해 개발한 표적신호 생성 모델, 주변소음 모델을 기반으로 고정된 탐지 문턱 값으로 부터 표적탐지 변별력이 향상되는 실험 결과를 제시하고, 본 연구의 어뢰소나 표적탐지 모델링 방안에 대한 결론을 제 4장에서 고찰한다.
본 연구를 통해 개발한 표적탐지 모델에 의한 어뢰발사 시뮬레이션은 육상 전술훈련장 및 함 내 모의훈련 기능에 탑재되어 운용군의 팀웍훈련 시 소음원에 대한 설정 이외에 다양한 환경설정을 가능하게 하여 이를 통한 표적탐지 변별력을 향상시킴으로써 실제 유선유도 어뢰발사 상황에 근접한 시나리오를 통한 훈련 효과를 보장할 수 있다.
2. 어뢰소나 표적탐지 모델링 연구
실제 어뢰처럼 표적신호를 탐지하기 위해서는 잡음 대비 신호의 세기를 음원준위로 산출함으로써 표적탐지를 위한 문턱 값 보다 큰 음원준위의 신호인 경우 표적으로부터 기인한 신호로 판정하게 된다. 수중음파탐지환경에서 소나방정식이라는 기본 이론을 근간으로 방정식의 각 항에 대한 실제적인 모사를 위한 연구는 다양하게 발전되어왔다[1,2].
본 연구에서는 어뢰발사 시뮬레이션에서 수신한 표적소음 기본 준위를 실제 환경과 유사하게 활용할 수 있도록 여러 신호들 가운데에서 표적신호를 선별하기 위한 어뢰소나 표적탐지 모델링 방안을 제시한다. 해양환경에서 수중 음향신호는 해수(Seawater) 매질의 특성으로부터 음원이 일으키는 압력, 부피, 힘 등 물리적인 관계에 의해 신호의 세기와 준위로 유도할 수 있다[3]. 소음준위(Sound Level)는 해수라는 매질의 기준소음세기 대비 매질을 통해 전달되는 소음세기의 비(Ratio)를 데시벨(dB)로 표현한다. 소음준위는 식 (1)과 같이 소음세기의 비, 음압의 비로 나타낼 수 있다.
J0는 기준소음세기, Js는 음원으로부터 1 m 거리만큼 전달된 소음세기, p0는 기준음압, ps는 1 m 거리만큼 소음을 전달하기 위해 가해주는 음압을 의미한다.
2.1 실제적인 표적신호 모델링 연구
본 연구에서는 보다 실제적인 표적신호 소음원 모사를 위해 특정 주파수에 대한 세기 및 준위를 얻는 형태가 아닌 일정한 주파수대역의 광대역음원을 수신하는 상황을 가정하여 표적신호에 대한 광대역음원 준위를 Fig. 2와 같이 모델링하였다.

Broadband target signal level
광대역음원은 주파수대역 내의 각 주파수성분에 대한 세기의 합으로 나타나며 근사화하면 시작 주파수성분에 대한 세기를 기준으로 하는 주파수대역만큼의 면적을 의미한다. 따라서 어뢰의 탐색기가 표적의 광대역음원이 발생하는 표적중심위치로 빔(Beam)을 향하고 있을 때 수신하는 표적의 광대역음원 세기와 광 대역음원 준위는 식 (2)와 같이 정의하였다.
본 연구에서 정의하는 표적은 실제 해상에서 존재하는 어선 및 상선에서부터 전시상황에서의 구축함 및 잠수함까지 시나리오에 따라 다양한 입력범위의 기동 및 소음원 준위를 설정할 수 있도록 개발하였으며, 본 절에서는 운용자 설정값에 대해 넓은 주파수대역으로 확장함으로써 표적신호로부터 생성되는 음원준위(Source Level)가 어뢰소나까지 전파되는 과정에서 손실이 발생되는 경우를 고려하여 광대역에 걸친 소음원으로 모사하는 방법을 제시한다.
2.1.1 표적신호의 물리적 전달손실 모델
일반적인 소나방정식에서는 소음원으로부터 발생되는 소음의 기본 준위에 대해 매질 안에서 거리에 따른 전달손실(Transmission loss)을 고려한다[3]. 매질 내에서 전달 거리에 따른 음향에너지가 닿는 면적의 증가 즉, 음향에너지의 분산 성질을 반영한 전달손실의 영향으로 1 m 거리만큼 전달되는 소음준위는 거리가 증가함에 따라 감소할 것이다. 따라서 전달손실 되는 음원준위는 식 (3)과 같다.
여기서 Ls는 음원으로부터 1 m 거리만큼 전달된 소음준위, Lr은 음원으로부터 거리 r만큼 전달된 소음준위를 의미하고 그 차이인 TLg는 r원의 전달손실 준위를 의미한다.
2.1.2 표적신호의 화학적 전달손실 모델
본 연구에서는 보다 실제적인 모사를 위해 거리에 따른 전달손실과 더불어 해수라는 매질의 수중환경을 고려함으로써 매질을 구성하는 성분의 화학적 특성, 수심에 따른 수온 및 압력의 영향 등에 의한 음파 전달손실 가능성을 추가적으로 가정하였다.
Fig. 3은 해수 매질의 화학적 특성에 따른 음파의 흡수 정도에 대한 Simmons의 실험 측정치를 식 (4)의 Fisher 수식을 통해 모델링한 결과이다[4]. 이를 흡수에 의한 음향신호의 전달손실을 의미하는 흡음계수(Absorption coefficient) αL(f)로 정의하고, 해수를 구성하는 대표적인 성분 중 붕산(H3 BO3), 황산마그네슘(MgSO4), 불순물을 함유하지 않은 순수 물의 특성을 고려하여 이 3가지 해수 성분의 영향성의 합으로 흡음계수를 모델링하였다.

Absorption coefficient model
ABA, AMS, APW는 각각 붕산, 황산마그네슘, 순수 물의 온도, 염도, 산성도와 같은 화학적 특성, PBA, PMS, PPW는 각각 압력 특성에 따른 흡음 영향성을 의미하는 상수이다. 그리고 fBA, fMS는 붕산, 황산마그네슘의 화학적 반응에 따른 주파수 영향성으로써 순수 물의 경우 영향성을 고려하지 않는 완화주파수로 정의된다[4]. 여기서 염도 35 ‰, 산성도 8.0인 해수의 온도는 10 ℃, 압력은 1 atm으로 가정하였다. 이와 같이 매질의 성분에 따라, 그리고 매질의 환경에 따라 흡수되는 음향신호를 고려한 거리 당 전달손실 레벨 TLα는 식 (5)와 같이 흠읍계수와 거리로 표현할 수 있다.
2.1.3 광대역 표적신호의 모델링
본 연구에서는 표적신호를 생성함에 있어 보다 실제적인 해상환경에 따른 영향성을 모사하기 위하여 표적이 발생하는 음향신호에 대해 광대역 음원으로 모델링하고 발생 소음이 전파되는 과정에서 감쇄, 즉 전달손실 현상에 대한 분석과 적용을 연구하였다. 일반적인 소나방정식에서 제시하는 거리에 따른 감쇄 영역인 기하학적 전달손실에 이어 매질을 구성하는 화학적 성분의 수심에 따른 수온, 압력에 의한 음향 전파 특성 이론을 추가로 가정하여 적용함으로써 표적으로부터 발생되어 해수를 통해 전달되는 음향신호 레벨은 식 (6)과 같이 광대역음원 준위와 전달손실 레벨로 모델링 할 수 있다.
SL은 시작 주파수와 주파수 대역으로 계산되어지는 광대역 음원 준위, TL 은 거리에 따른 전달손실인 TLg와 매질의 화학적 특성에 의한 흡음에 따른 전달손실인 TLα의 합으로 표현되는 전달손실 레벨을 의미한다. 본 연구에서의 보다 실제적인 표적신호의 생성과 전달, 최종 어뢰소나가 수신하게 될 표적의 음향신호 레벨은 n개의 주파수와 대역폭들에 대한 음원준위를 계산하여 소음세기의 누적을 통한 광대역 음원 준위를 식 (7)과 같이 모델링하였다.
2.2 실제적인 주변소음 모델링 연구
실제 수중환경에서 수신되는 표적소음은 표적에서 발생하는 소음원을 그대로 수신할 수 없다.
본 연구에서는 표적신호 모델링과 동일하게 실제적인 소음원 모사를 위해 광대역소음원을 수신하는 상황을 가정하여 주변잡음에 대한 광대역 소음원 준위를 Fig. 4와 같이 모델링하였다. 주변소음신호 또한 표적신호와 마찬가지로 주파수대역 내의 각 주파수성분에 대한 세기의 합으로 근사화한 광대역음원으로 모델링 할 수 있다. 본 절에서는 어뢰소나가 수신하는 주변잡음의 광대역소음세기와 광대역 소음원 준위를 식 (8)과 같이 정의함으로써 넓은 주파수대역으로 확장하여 모사하는 방법을 제시한다.
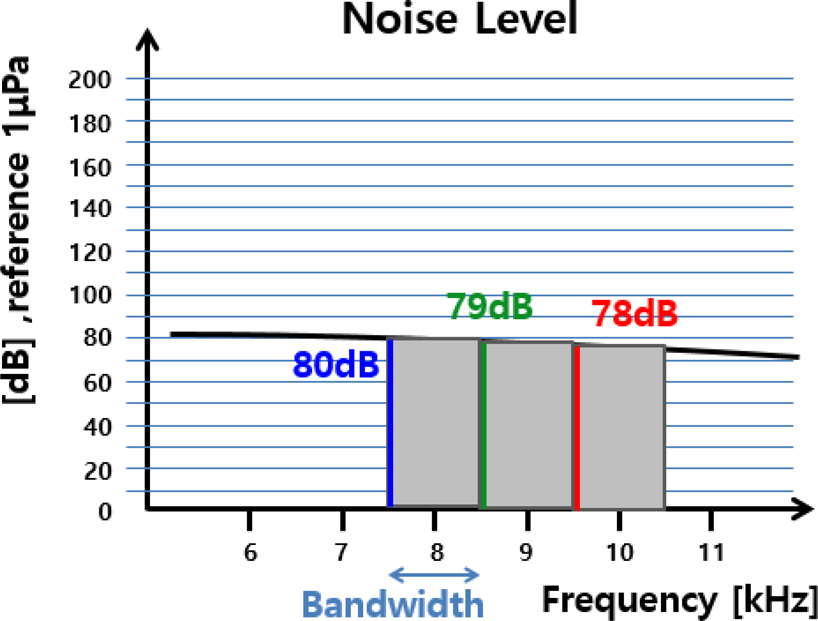
Broadband noise level
2.2.1 주변환경 잡음 모델
광대역소음원을 기본 모델로 하는 주변잡음은 주파수대역에 따라 환경적인 요소에 의한 실험적인 영향성 분석 결과를 토대로 모델링할 수 있다[5].
20 Hz 미만의 초저주파대역에서는 해류에 따른 해수면의 움직임 혹은 운동에 의한 압력 변화에 의해 잡음의 영향을 받을 수 있고, 500 Hz 미만의 주파수대역에서는 주변 선박 등 교통량의 증가에 따른 추진기소음의 영향으로 잡음이 발생할 수 있다. 50 kHz 미만에서는 바람의 세기 즉 속력에 따라 파고가 일어나고 이에 따른 해수면의 교란의 영향, 50 kHz 이상의 초고주파 대역에서는 수온에 따라 해수를 구성하는 분자의 열 교란에 의한 영향으로 잡음을 정의할 수 있다. Fig. 5는 Wenz 곡선을 모델링한 결과를 나타내며, 바람의 속력에 따른 해상상태를 Table 1과 같이 8가지로 분류하였다.
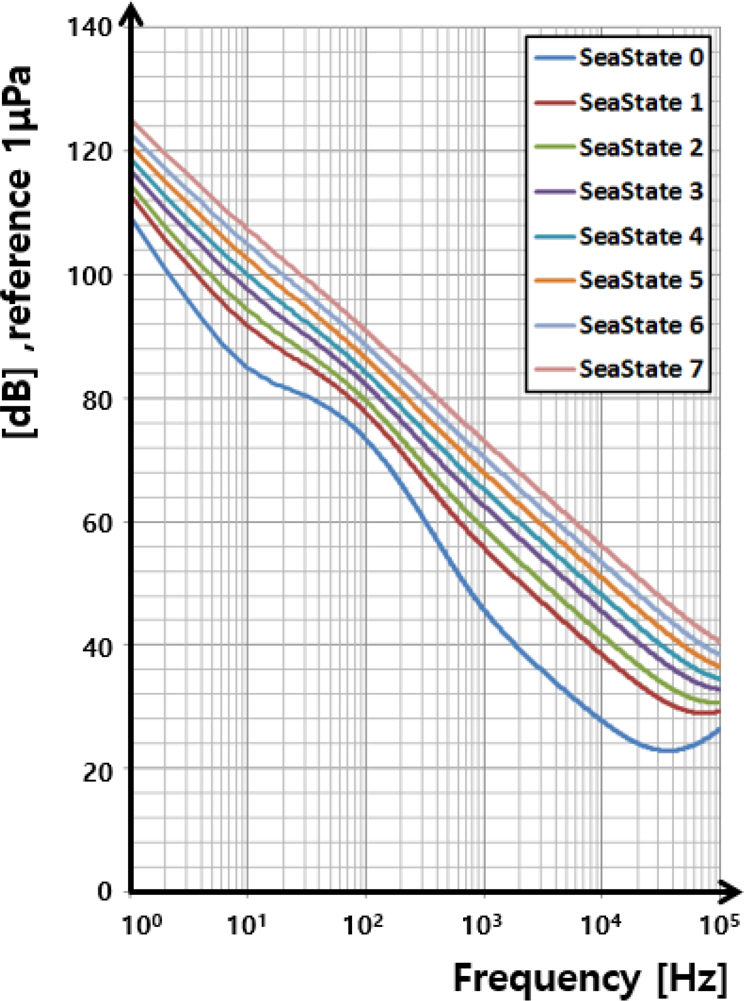
Approximated Wenz curve model
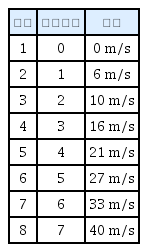
Sea state from wind speed
본 연구에서는 주파수 대역 별 영향성이 높은 환경 요소를 정의한 Wenz 곡선을 근사화하도록 한국 해역의 소음측정자료를 이용하여 새롭게 소음 모델을 향상시킨 식 (9)의 계수를 적용하였다[6].
NLturbulance은 20 Hz 미만의 해류의 영향에 의한 환경잡음 레벨, NLtraffic은 500 Hz 미만의 교통량의 영향에 의한 환경잡음 레벨을 의미하며 Tr은 1 이하의 해상 선박밀도를 의미한다. NLwind는 50 kHz 미만에서바람의 속력인 vwind에 따른 파고 등 해상상태의 영향, NL50k은 50 kHz 이상 초고주파 영역에서의 해수의 수온 영향에 의한 환경잡음 레벨을 의미한다[7].
2.2.2 어뢰자체소음 모델
표적을 향해 기동하는 유선유도 어뢰는 전투체계의 명령을 통해 속력을 제어하는데 본 연구 대상 잠수함에 탑재되는 어뢰는 저속, 중속, 고속의 단계로 속력 제어가 가능하다. 어뢰의 속력이 증가하기 위해서는 명령을 받은 어뢰의 추진부에 의해 프로펠러의 RPM 이 증가하고 따라서 어뢰자체가 발생하는 소음이 증가하게 된다. 이처럼 속력 제어에 의한 어뢰자체소음의 변화는 어뢰 선수에 탑재된 어뢰소나가 인지하는 시스템잡음으로 모델링 할 수 있다. 수중운동체에 대한 유체소음특성 분석을 통한 자체소음 모델링 연구가 잠수함 등의 플랫폼의 종류에 따라 진행되고 있으며[1,8,9], 본 연구에서는 현실적인 운용군의 경험치를 기반으로 해석함으로써 최종 운용군의 모의훈련 기능으로의 활용성을 목적으로 풀어내고자하였다.
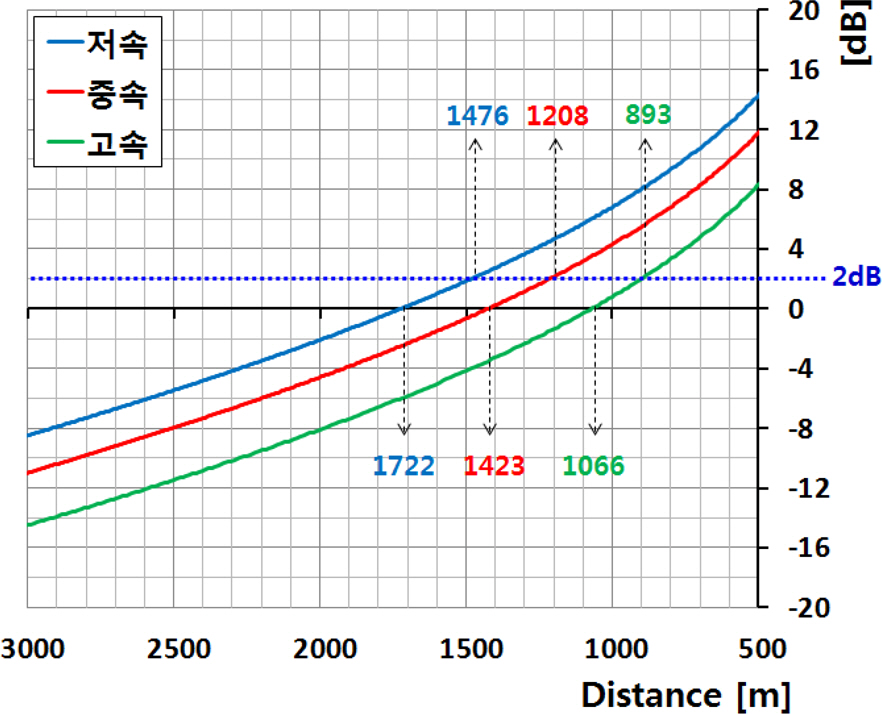
본 연구에서는 어뢰속력에 따른 어뢰소나의 표적 접촉거리에 대해 운용군의 실제 훈련어뢰 발사 경험을 기반으로 반복 시뮬레이션을 수행하여 실험적 데이터를 수집하였다. 운용군의 실제 해상 어뢰발사훈련을 통한 경험치를 기반으로 어뢰표적간 거리에 따른 어뢰소나의 탐지준위를 시뮬레이션을 통해 추산하여 평균값을 Table 2와 같이 도출하였다. 유선유도어뢰는 3단계의 명령속력을 수신하여 기동하며, 실제 어뢰소나는 주변소음이 공존하는 환경으로부터 표적신호를 탐지하기 위한 표적의 신호 대 잡음비(SNR) 측정준위에 대해 0 dB 이상의 신호를 표적 후보 신호로 탐지하고, 2 dB를 넘는 신호에 대해 표적으로 확정한다.

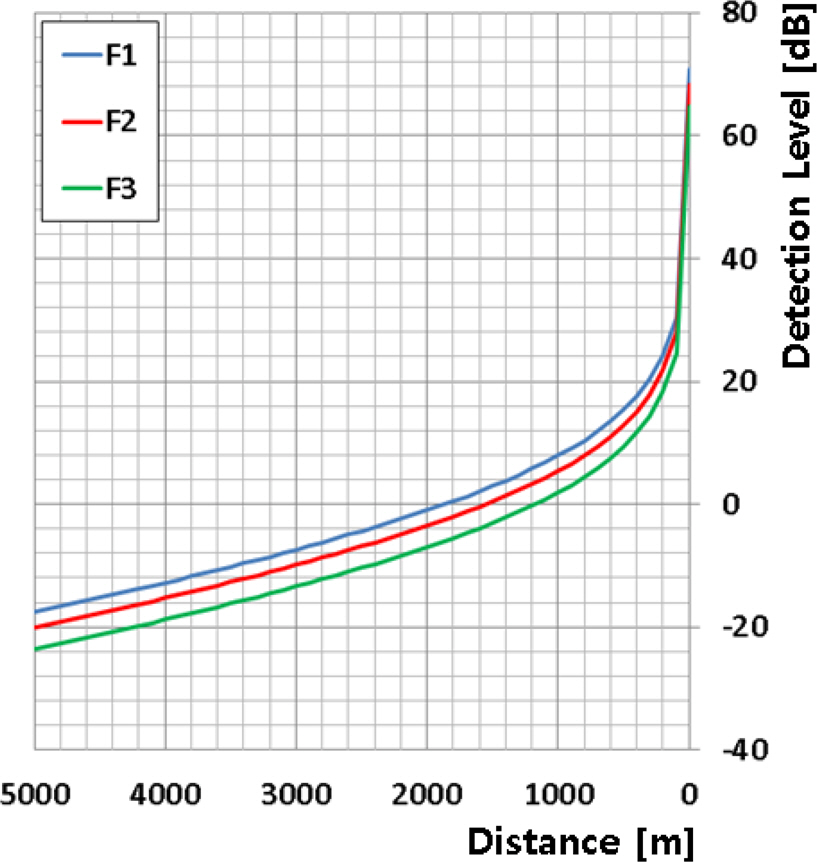
Target detection level from torpedo speed
Fig. 6은 실험적 데이터의 평균값을 비교한 결과이다. 어뢰로부터 표적 간 거리 2 km 이내에서 1 km 까지 근접한 사이에서 탐지가 이루어지며 이때 어뢰속력에 따른 탐지거리가 구분이 되는데 어뢰 명령속력이 F1, F2, F3로 증가할 수 록 표적소음원의 감쇄로 인해 탐지거리가 짧아지는 경향을 확인할 수 있다.
Target detection results
본 연구에서는 운용군의 경험치를 기반으로 실험적 데이터 수집을 거쳐 Fig. 7과 같이 구간 선형 모델(Piecewise linear model) 설계를 통해 어뢰속력 증가에 따른 소음 영향을 주변소음모델링에 고려하도록 연구하였다. 어뢰속력 저속을 기준으로 어뢰소나의 표적 접촉거리를 시뮬레이션을 통해 설정한 뒤 어뢰속력을 중속, 고속으로 증가시키며 어뢰속력 별 표적 접촉거 리를 데이터로 확보하여 최적화된 어뢰속력 별 어뢰자체소음 준위를 식 (10)과 같이 모델링하였다.
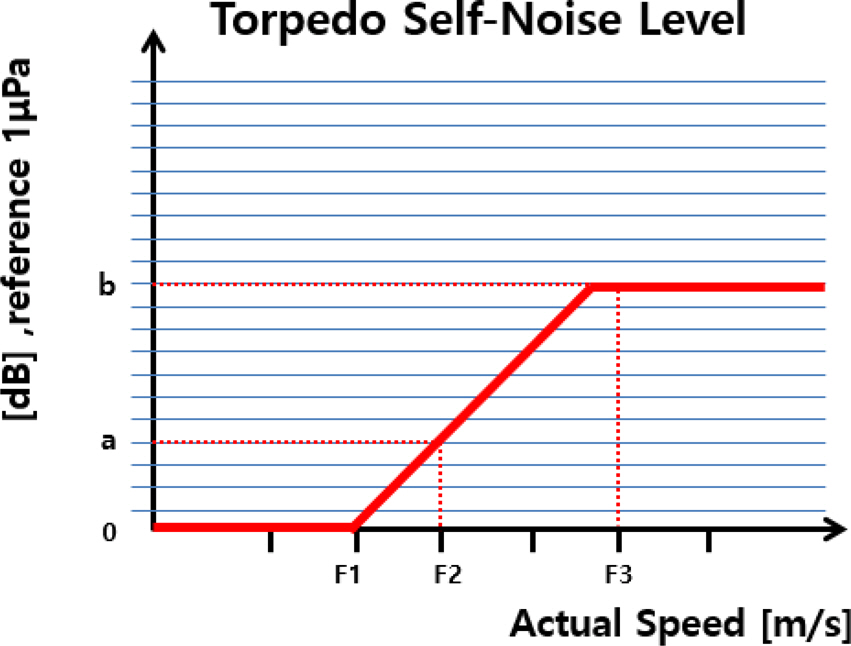
Torpedo self-noise level
NLv는 어뢰속력에 따른 어뢰자체소음(Torpedo self-noise) 레벨을 의미하며 S는 어뢰의 주행속력, F1은 저속, F2는 중속, F3는 고속을 의미한다. a와 b는 실험적으로 수집된 결과로써 대상 어뢰의 성능, 즉 어뢰의 주행가능 속력 및 어뢰소나의 표적 접촉거리에 따라 설계변경 가능한 파라미터이다. 본 연구에서는 실제 경험치를 바탕으로 한 실험적 모델을 통해 설계파라미터를 도출해냄으로써 어뢰의 종류 및 제원에 따라 운용자가 설정 입력하여 시나리오에 따른 유연한 운용을 지원할 수 있다.
2.2.3 광대역 주변소음의 모델링
본 연구에서는 주변소음에 따른 영향성을 고려하기위해 주변환경소음 ANL과 어뢰속력 증가에 따른 어뢰자체소음 TNL을 반영하여 보다 실제적인 주변소음 모사를 위해 n개의 대역폭들에 대한 음원준위를 계산하여 소음세기의 누적을 통한 광대역음원 준위를 식 (11)과 같이 모델링하였다.
2.3 광대역 어뢰소나 표적탐지 모델링 연구
어뢰소나가 주변소음환경으로부터 표적신호를 탐지하기 위한 표적의 신호 대 잡음비를 로그 스케일로 변환하여 기준소음레벨을 적용하면 신호세기와 신호레벨 간의 관계를 통해 표적신호의 음원준위와 주변소음의 레벨로 표현할 수 있다. 어뢰소나의 표적신호 탐지 모델링을 위해 표적으로 의심되는 신호들에 대해 각각 계산된 신호 대 잡음비 준위가 탐지 문턱 값 DT를 넘는 신호인지를 비교한다. DI는 빔의 방향성을 나타내는 지향지수이며, BL 은 수동 어뢰소나의 빔 패턴에 따라 어뢰소나가 수신하는 소음의 손실 준위를 의미한다[3]. LS은 식 (7)의 광대역 표적신호 모델링 결과이며 LN은 식 (11)의 광대역 주변소음 모델링 결과로써 식 (12)와 같다.
본 연구에서는 어뢰소나의 표적신호 탐지 과정에 있어서 실제적인 해상환경에 따른 영향성을 근사화한 음파전달 감쇄현상 모사를 위하여 음파의 화학적 전달손실 모델 적용, 환경에 의한 감쇄 및 어뢰 시스템 특성에 따른 감쇄 가능성들에 대한 분석을 통해 표적소음 및 주변소음에 대한 광대역음원 모델링을 연구하였다. 수중음파탐지환경에서 소나방정식이라는 기본 이론을 근간으로 방정식의 각 항에 대한 기존 모델링 연구결과들 가운데에서 보다 실제 어뢰발사 환경에 근접하도록 해수 매질을 구성하는 화학적 성분에 대한 실험을 통한 전달손실 모델[4] 및 한국해역에서의 측정을 기반으로 한 주변소음모델[5,6] 등 실험치를 기반으로 한 모델을 분석 및 선정하여 어뢰소나 표적탐지 모델링에 적용하였다. 또한, 특정 주파수보다는 실제처럼 넓은 대역에 걸친 주파수대의 소음원을 생성 하고, 운용군의 실제 경험을 근간으로 한 현상 해석적인 자체소음 모델링을 추가함으로써 최종적으로 운용군에서 요구한, 실제 어뢰발사 상황과 근접한 탐지거리를 시뮬레이션 모델로 실현화하여 운용군이 본 연구결과를 실시간 팀웍훈련에 활용할 수 있도록 개발하였다.
3. 어뢰소나 표적탐지 시뮬레이션 결과
본 연구에서는 표적신호 및 잡음신호의 광대역음원 생성과 표적소음의 전달손실, 주변환경소음 및 어뢰자체소음 모델링을 통해 환경에 따른 영향성이 반영된 실제적인 어뢰소나 표적탐지 시뮬레이션을 수행하였다. 비교를 위해 기본 소나방정식을 적용한 시뮬레이션을 통해 본 연구에서 제시하는 모델링 방안에 대한 개선된 결과를 도출한다.
3.1 시뮬레이션 시나리오
시뮬레이션은 Fig. 8과 같이 정지된 표적을 향하여 등속 직선기동을 하는 시나리오이며, 해상상태는 1, 교통량은 0.5, 어뢰의 속력은 저속(10 m/s), 중속(12 m/s), 고속(18 m/s)으로, 어뢰자체소음 모델링을 위한 설계변수인 a와 b는 각 각 2 dB, 5 dB로 설정하였다.
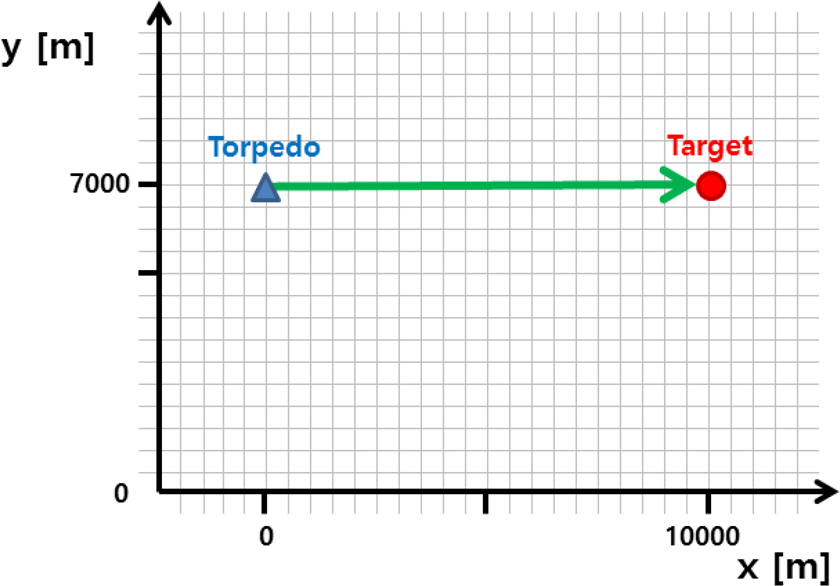
Simulation scenario
표적신호의 광대역 기본 음원준위는 75 dB, 기준주파수는 21.4 kHz, 주파수대역폭은 860 Hz로 설정하였으며, 어뢰소나의 수동 빔 패턴은 Fig. 9와 같이 정의하여 수직방향 0도 기준으로 수평방향의 빔 패턴을 고려하였다.

Reception beam pattern
3.2 어뢰속력에 따른 표적탐지 시뮬레이션 결과본
본 시뮬레이션은 고정 음원준위 설정값 입력을 통한 기본 소나방정식의 표적탐지 성능과 본 연구에서 제시한 어뢰소나 표적탐지 모델을 비교함으로써 탐지변별력이 향상됨을 통해 성능을 평가하고자 한다.
Fig. 10은 운용자가 표적소음원 준위 75 dB, 주변환경소음원 준위 15 dB의 고정값을 설정한 기본 소나방정식에 따른 표적탐지 시뮬레이션 결과로써 오직 표적이 발생하는 소음세기와 잡음세기, 거리에 따른 전달손실을 제외하고 해상상태 및 어뢰속력에 따른 어뢰소나의 표적접촉 거리 차이가 없어 표적탐지에 대한 변별력을 갖기에 한계가 있다. Fig. 11은 어뢰속력 별 어뢰와 표적 간 거리에 따른 소음 준위의 감쇄차이를 통해 표적을 향하여 접근하는 어뢰의 어뢰소나가 표적신호를 탐지하고 접촉하는데 있어 Fig. 10과 달리 어뢰속력에 따른 변별력을 보여준다.

Target detection with basic sonar equation
Target detection by torpedo speed
실제 어뢰처럼 어뢰소나가 수신한 소음원 준위가 0 dB 이상일 경우 표적 후보로 탐지하고 2 dB 이상일 경우 표적으로 간주하여 접촉한다. 어뢰속력이 저속, 중속, 고속으로 증가할수록 어뢰자체소음 증가에 따른 어뢰소나에서 수신하는 표적소음원의 감쇄로 인해 표적신호 탐지 및 접촉 거리가 짧아지는 것을 확인할 수 있다. 이로써 운용군은 훈련 시 단지 표적의 소음원과 환경잡음 소음원의 입력에만 의존한 탐지성능이 아닌, 유도수의 어뢰속력 변경 운용에 따른 탐지성능의 차이를 경험할 수 있다.
3.3 해상상태에 따른 표적탐지 시뮬레이션 결과
본 시뮬레이션은 운용자의 해상상태 선택입력에 따른 주변환경소음의 영향으로 인한 표적 소음의 감쇄 차이를 통해 탐지 성능의 차이를 확인하기 위함이다. 시뮬레이션에서 표적을 향하는 어뢰의 속력은 중속(12 m/s), 교통량은 중간인 0.5로 설정하였으며 표적신호의 광대역 기본 음원준위는 75 dB, 기준주파수는 21.4 kHz, 주파수대역폭은 860 Hz로 설정하였다.
Fig. 12는 본 연구에서 제시한 모델링 결과로써 해상상태에 따른 주변환경소음의 영향으로 표적신호의 감쇄로 인해 해상상태가 나빠질수록 어뢰소나의 표적 탐지 및 접촉 거리가 짧아지는 결과를 보여준다. 따라서 운용군은 본 시뮬레이션을 통한 훈련 시 해상환경 설정값 입력을 통해 표적소음원의 감쇄 영향성을 발현시켜 어뢰소나의 표적탐지 성능을 제어할 수 있어 시나리오에 따른 다양한 어뢰운용을 경험할 수 있다.

Target detection by sea state
4. 결 론
훈련 및 작전 상황에서 실제 어뢰발사는 환경적인 요인으로 인한 위험(Risk)을 동반하고 있어, 실 어뢰에 대한 발사훈련 실패 및 작전 실패는 많은 인력과 비용으로 관리되는 군수물자인 어뢰를 잃어버리거나 낭비하는 상황으로 이어져 투입된 자원과 지원세력 등 운용군의 막대한 손실을 야기한다. 따라서 실제 어뢰발사 전 작전 시나리오를 통해 운용군의 팀웍훈련을 반복 수행함으로써 운용능력을 고취시키기 위한 시뮬레이션 기능은 운용군에게 있어서 반드시 요구되는 기능이다. 본 연구에서는 잠수함 통합전투체계 개발에서 보다 실제적인 어뢰발사훈련 환경을 요구하는 운용군의 경험을 토대로 어뢰소나 표적탐지 환경에 대한 분석, 모델링 및 시뮬레이션 방법을 제시하였다. 실제 어뢰발사 환경은 넓은 주파수대역에서 어뢰와 표적 간 음파전달에 있어 다양한 요인에 의한 신호의 손실 및 감쇄가 발생하기 때문에, 본 연구에서는 이러한 요인에 대해 실험치 기반의 모델 연구결과 활용과 운용군의 경험치를 기반으로 분석, 모델링함으로써 손 실 및 감쇄 요인에 대해 가상의 어뢰발사훈련 상황에서 다양하게 설정 가능하도록 시뮬레이션 개발에 반영하였다. 이처럼 운용군의 훈련의 질을 향상시키기 위한 목적으로 보다 실제적인 환경 모사를 위해 특정 주파수가 아닌 해상환경의 광대역 주파수에 대한 표적 및 잡음신호를 가정하여 음원을 모델링하였다. 또한, 표적신호 모델링에서는 잠수함이 운용되는 해수매질을 고려한 음향신호 전달손실 연구에 근거한 근사화 모델을 적용하였고[4], 어뢰소나의 표적신호 탐지 준위에 감쇄요인이 되는 잡음신호 모델링에서는 주파수대역에 따른 영향성을 갖는 주변환경 잡음 이론을 한국 해역에 접목시킨 근사화 모델[5,6], 운용군의 실제 경험치를 기반으로 데이터수집 및 분석을 통해 어뢰속력의 증가에 따른 자체소음에 대한 모델링 연구를 수행하였다. 이를 통해 고정된 탐지 문턱 값으로부터 어뢰소나의 표적신호 탐지 변별력을 향상시킴으로써 실제 유선유도 어뢰 발사 후 운용 시 어뢰속력 운용 및 해상환경에 따른 어뢰소나 표적탐지 여부 및 탐지대상 표적과의 잔여 거리에 연계되는 다양한 운용 설정값을 통해 실제 운용절차를 훈련에 적용할 수 있도록 개선하였다.
본 연구를 통하여 개발된 어뢰소나 표적탐지 모델은 현재 Fig. 13과 같이 잠수함 운용부대의 육상 전술훈련장의 무장시뮬레이터 및 잠수함 전투체계의 모의훈련기능에 탑재되어 운용군의 작전 운용 능력 향상 및 향후 잠수함 승조원을 육성하기 위한 기반이 되고 있다. 본 연구의 결과를 바탕으로 잠수함 운용군의 어뢰발사 팀웍훈련을 위한 시나리오, 실제 작전과의 연계 및 실 해상데이터를 이용한 연구 및 발표된 다양한 최신 수중음향탐지 모델링 기술에 대한 분석,[10] 연구를 통하여 향후 지속 발전시켜나간다면 잠수함 운용군의 역량 향상에 기여할 수 있는 활용이 기대된다.

Land based training center