



서 론
높은 효율성으로 많은 분야에 사용되고 있는 구동장치는 사용하는 에너지원에 따라 유압식, 공압식, 전기식 구동장치로 구분 할 수 있으며, 항공우주 및 유도무기 등 여러 분야에서 연구가 진행되고 있다[1-3].
일반적으로 항공기에 장착하여 사용하는 유도무기체계는 구동장치를 이용한 조종면 제어를 통해 탄이 최적의 경로로 목표지점에 도달하도록 하며, 이러한 성능에 대한 신뢰성을 검증하기 위해 수십 차례의 비행시험을 수행하게 된다. 그러나 장거리를 비행하는 유도탄은 높은 고도에서 운용됨으로서 가혹한 저온 환경에 노출되어 시스템 내 구동 장치 및 자체 배터리 성능이 저하될 우려가 있다[4,5]. 특히, 유도키트를 사용하는 공대지 중거리 유도탄[6]은 항공기에 장착된 상태에서 높은 고도까지 이동 후 투하되기 때문에 투하 시점에 날개 전개를 위한 구동 모터 제어 시 저온에서의 큰 돌입 전류로부터 내부 전원이 불안정해 질 수 있는 가능성이 있게 된다.
기존에는 시스템의 큰 전류 발생에 대비하여 슬라이닥 전압조정기(Slidac Voltage Regulator, SVR)형 장치를 통해 전압 강하 보상시간을 단축시키는 방안을 제시하였다[7]. 또한 고효율 리튬이온 배터리에 지능형 히팅 시스템을 적용하는 연구도 진행이 되었다. 히팅 시스템을 자동적으로 구현하기 위해 배터리 관리 시스템(Battery Management System, BMS)을 기반으로 연산 알고리즘을 적용하여 저온에서 운용하는 시스템의 문제를 완화할 수 있었다[8]. 그러나 이러한 방법들은 복잡성 및 전력 소비를 증가시키며, 또한 부피와 무게 증가 등으로 성능 저하를 유발하게 된다.
본 논문에서는 유도키트를 사용하는 공대지 유도탄의 투하 후 날개 전개 시 시스템 안정성 확보를 위한 구동 모터 작동 로직 설계 방안을 제안한다. 작동 로직을 설계하기 위해 온도에 따른 모터의 소모 전류를 확인하였으며, 이를 기반으로 모터 작동 로직 선정을 위한 절차를 제시하였다. 그리고 절차를 통해 도출한 구동 로직으로 별도의 장치나 시스템 추가 없이 저온에서 날개 전개 시 배터리 전압 강하를 완화하여 유도키트의 향상된 전개구동장치 운용 시스템 안정성을 검증하였다.
유도키트 시스템
2.1 유도키트의 구성
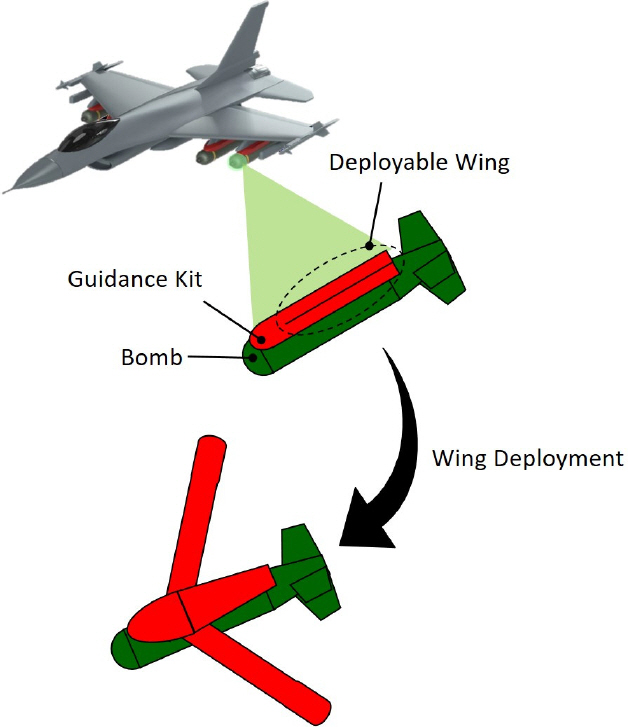
공대지용 중거리 유도탄에 장착되는 유도키트는 유도장치, 전개장치, 항법장치, 분리장치 그리고 각종 배선과 전원공급용 배터리로 구성되어 있다. 유도키트는 Fig. 1과 같이 탄이 투하 된 후 날개의 전개가 가장 먼저 이루어지며, 항법장치의 신호를 받은 유도장치는 지속적으로 위치를 파악하고 조종면의 구동 명령을 통하여 목표 지점까지 활공하게 된다. 그러므로 유도키트는 안정적인 활공으로 임무를 수행하기 위해서 시스템의 각 구성품에 적절한 전원이 지속적으로 공급되어야 한다.
2.2 유도키트의 날개 전개 운용 로직
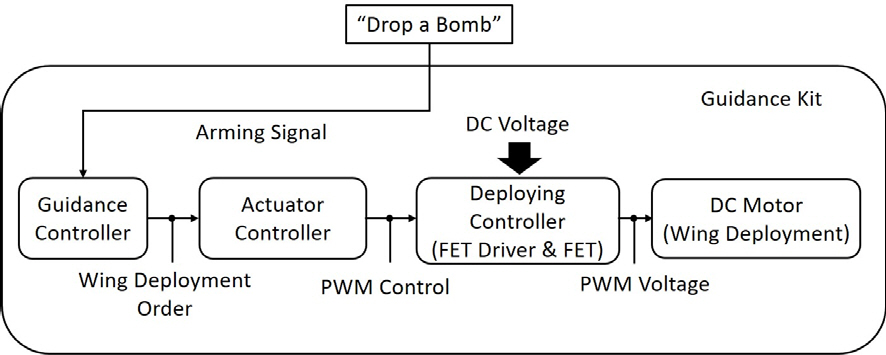
Fig. 2의 유도키트 작동 로직 순서는 유도키트를 장착한 탄이 항공기에서 투하된 다음 유도키트의 날개가 전개되기까지를 나타낸다. 먼저, 유도키트 내에 유도조종부에서는 항공기에서 탄 투하에 대한 장전선의 물리적인 감지를 통해 장전신호를 받아 날개 전개 명령을 작동회로에 전달한다. 그리고 작동제어부에서는 펄스 폭 변조(Pulsed Width Modulation, PWM) 신호를 구동부에 전달하면서 DC 모터 구동을 통해 날개가 전개되며, 이때 모터의 돌입 전류에 의해 시스템 전원의 전압 강하를 초래하게 된다. 따라서 유도키트 시스템의 안정성을 향상시키기 위해서는 실제 운용 환경에서 전개 모터 구동 시 소모 전류 완화를 통해 전압 강하를 완화시키는 안정적인 제어 로직을 선정할 필요가 있다.
DC 구동 모터 특성
3.1 DC 모터 원리
모터의 구동 제어 로직을 선정하기 위해 유도키트 내 DC 모터의 전기적인 특성을 파악해야 한다. Fig. 3에서는 DC 모터의 등가 회로를 나타내었으며, 모터의 인가전압 V in(V)은 (1)과 같이 표현 될 수 있다[9].
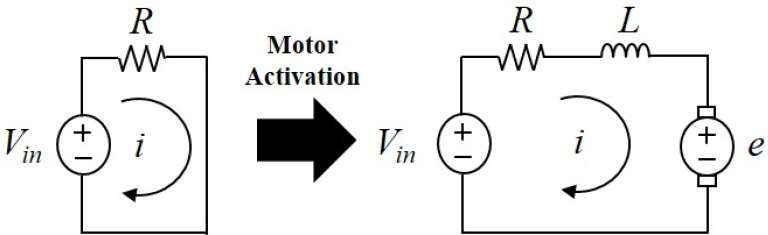
여기서 R(Ω)은 모터 저항, i(A)는 모터 소모 전류, L(H)은 코일 인덕턴스, e = K θ(V)는 역기전력, K는 기전력 상수, θ(rad)는 회전각이다. 그리고 식 (1)로부터 모터전류는 다음과 같다.
여기서 a = L d i d t + e
모터의 저온 특성을 고려한 구동 로직 설계
4.1 온도 시험 준비
유도키트를 장착하는 유도탄의 실제로 활공하는 환경은 주로 저온이므로 모터 작동에 대한 안정성을 확보하기 위해서는 DC 모터가 저온에서 어떤 특성을 갖는지 파악할 필요가 있다.
유도탄이 활공하는 저온 환경을 모의하기 위해 DC 모터가 장착된 개발용 유도키트를 탄에 장착하여 Fig. 4과 같이 저온 챔버에 배치하였다. 여기서 사용된 날개 전개용 DC 모터의 제원은 Table 1과 같으며, 유도키트의 날개를 정해진 시간 내에 완전히 전개하기 위해 모터의 정격 전압 이상인 28 V를 유도키트에 인가하였다.
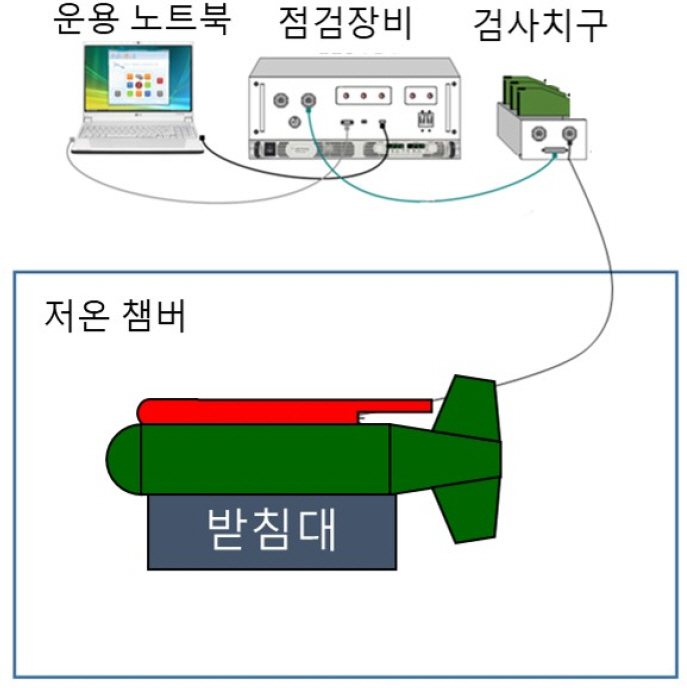
Table 1.
Spec of DC motor
| Name | Values |
|---|---|
| Normal voltage | 22 Vdc |
| Motor resistance | 0.2 Ω |
| Maximum output | 80 W @ 3000 rpm |
| Maximum torque | 0.25 Nm |
| Size | 60 mm(Ø) × 136 mm(L) |
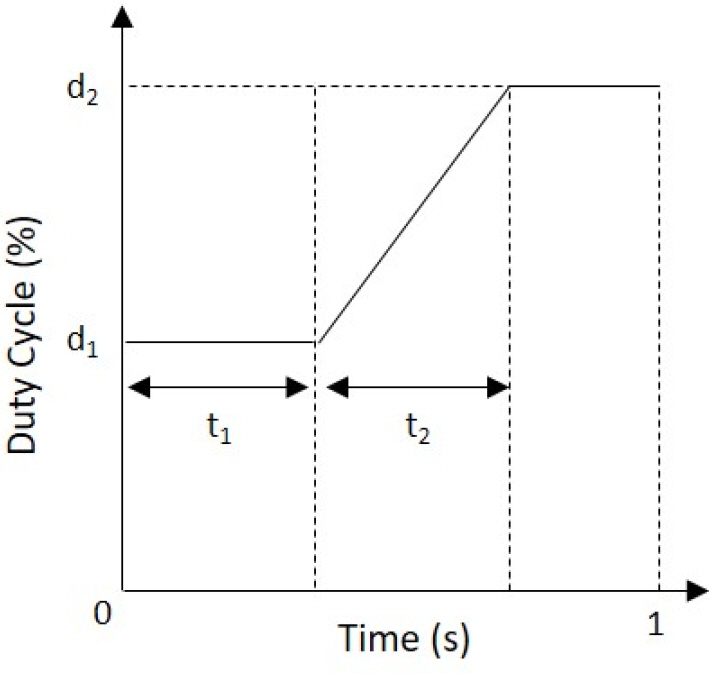
모터의 돌입 전류를 완화시키기 위해 시험에 적용된 날개 전개 구동 로직은 Fig. 5와 같으며, PWM 방식의 인가전압에 대한 초기 duty cycle(d1)의 유지시간(t1) 그리고 d2 = 100 % 까지 상승하는 시간(t2)을 조정하였다. 여기서 PWM의 주기는 10 kHz 이다.
4.2 온도에 따른 구동 모터 소모전류 결과
시험을 위해 일반적으로 10 kft 이상에서 운용되는 공대지 유도탄을 참고하여 −30 ℃ ∼ −54 ℃의 온도 범위를 설정하였다[10]. 시스템의 온도 안정화를 위하여 약 1시간 이상 지난 후 Fig. 5에서 설정한 로직대로 전압을 DC 모터에 인가하여 유도키트의 날개를 전개하였다. 그리고 날개 전개 시 모터에서 소모되는 전류를 1 ms 간격으로 측정하였다.
Fig. 6에서는 d1을 100 %로 하여 모터를 동작시켰을 때, 측정된 전류를 나타낸다. 전압을 모터에 인가한 시점에 발생한 돌입 전류가 25 ℃ 상온에서는 약 29 A, 저온에서는 31 A이었으며, 0.2 s 이후에도 모터가 회전하기 위해 소모되는 전류도 저온에서 20 A 이상으로 상온대비 더 상승하였다. 이러한 이유는 Table 2에 나타낸 모터의 윤활유 점도가 상온대비 저온에서 매우 높아지는 특성으로부터 정지하고 있는 모터의 마찰력이 상온보다 훨씬 커짐에 따라 모터가 작동하는데 필요한 전력도 더 커지는 것으로 판단된다.
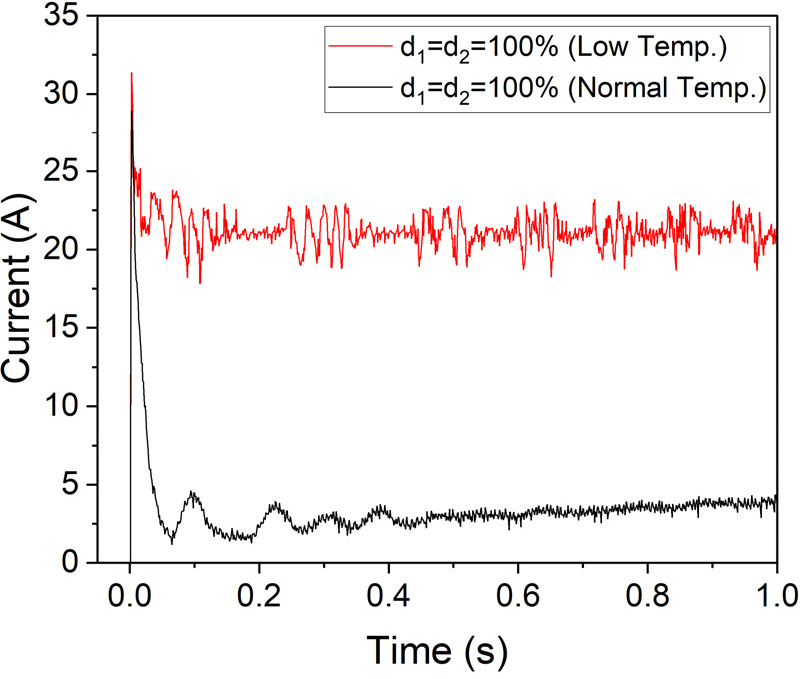
Table 2.
Spec of AeroShell grease 7
| Name | Type and Values | |
|---|---|---|
| Oil type | Synthetic ester(Diester) | |
| Thickener type | Microgel | |
| Viscosity | -40 ℃ | 1150 |
| 40 ℃ | 10.3 | |
| 100 ℃ | 3.1 | |
Fig. 7에서는 d1을 20 %, 30 %, 40 %로 조정한 초기 인가전압에 대해 상온에서의 모터 소모 전류 결과를 나타냈다. 그리고 Fig. 8에는 상온 대비 t1과 t2를 증가시켜가며 모터를 작동했을 때의 전류 결과를 정리하였으며, Table 3에서는 저온에서 수행한 모든 로직들에 대해 t1과 t2에서 발생한 최대 전류 결과를 정리하였다.
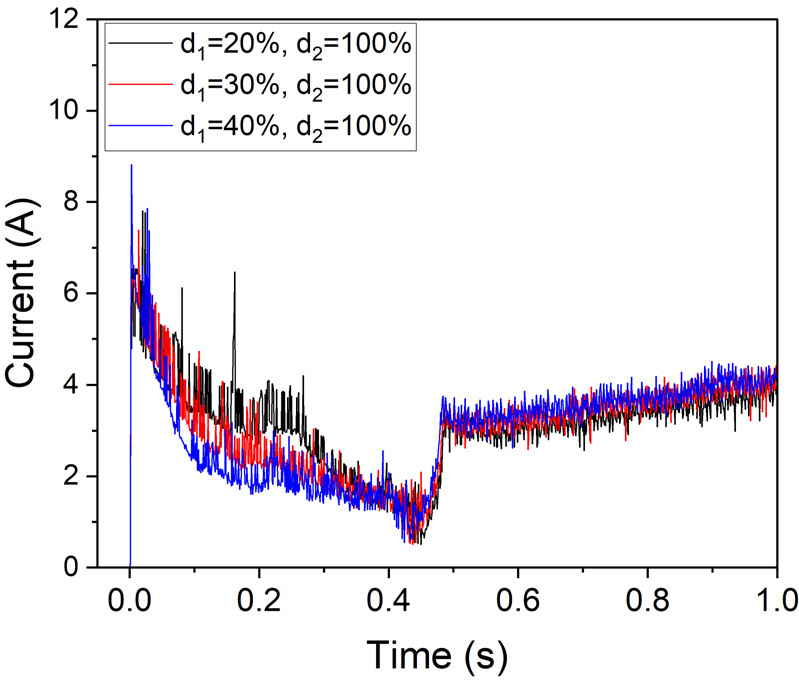
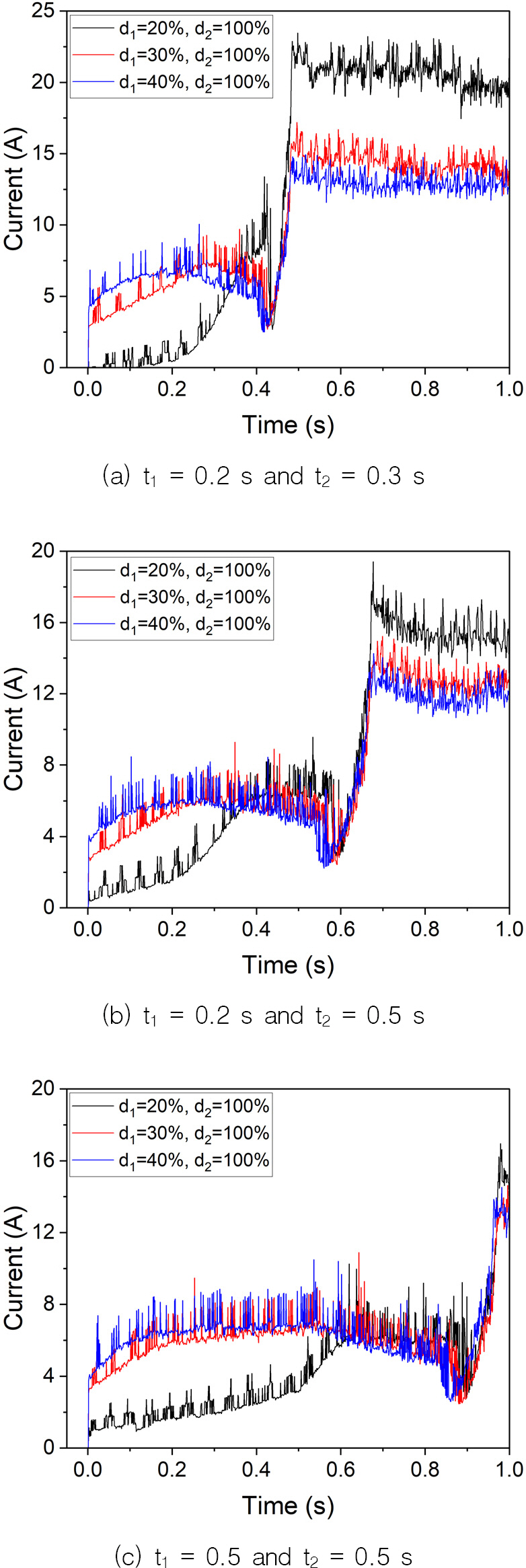
Table 3.
Maximum currents in low temperature
먼저 상온에서는 예상했듯이 d1 = 40 %에 대한 로직에서 가장 높은 돌입 전류 결과를 보였으나 저온에서는 공통적으로 d1 = 20 %에서 d2 = 100 % 도달 시의 t2에 대한 최대 소모전류가 가장 높은 것으로 확인되었다. 이는 상온 대비 저온에서 점도가 더 높아 d1 = 20 %의 전압으로는 모터의 높아진 정지 마찰력보다 적은 전력이 인가되어, 모터가 구동을 하지 못하였고 t1 동안 역기전력이 거의 발생되지 않았다. 그리고 t1시간 이후 d2 = 100 %로 상승되면서 모터 구동이 본격적으로 시작되어 최대 소모전류가 상온 대비 훨씬 커지는 것으로 예측할 수 있다. 또한, 저온에서 t1과 t2를 증가시켰을 때 모터의 회전을 통한 역기전력이 더 확보되면서 d2 달성 시에 대한 최대 전류가 작아짐을 확인했다.
이러한 결과로부터 모터의 돌입 전류를 완화시켜 시스템 전압 강하를 완화하기 위해서는 d1을 100 % 보다 작게 설정할 필요가 있으나 저온에서는 날개 전개 시간을 고려하여 짧은 시간 내에 역기전력을 확보하기 위해 d1을 모터가 구동하기 위한 최소 전압 이상으로 높게 설정할 필요가 있으며, d2 달성 시에 대한 전류 완화를 위해 t1과 t2를 적절히 증가시켜 구동 로직을 설계할 필요가 있게 된다.
4.3 안정적인 모터 구동 로직 설계 및 검증
Fig. 6과 Fig. 7 그리고 Fig. 8의 결과로부터 상온 대비 저온에서 모터 구동 시 최대 전류 소모가 더 커지는 특성을 확인하였다. 따라서 유도키트 시스템의 안정성을 향상시키기 위해서는 저온에서의 최대 소모전류를 우선적으로 완화시킬 필요가 있게 된다. Fig. 9에서는 유도키트 전원의 전압강하를 완화시키는 안정적인 모터 구동 로직을 선정하기 위해 수행한 날개 전개 시험 절차를 나타냈다. 여기서 최초의 구동 로직에 대한 d1, t1, t2는 시험을 통해 점진적으로 증가시키면서 적절한 값을 선정하기 위해 가능한 한 작은 값으로 설정하였다.
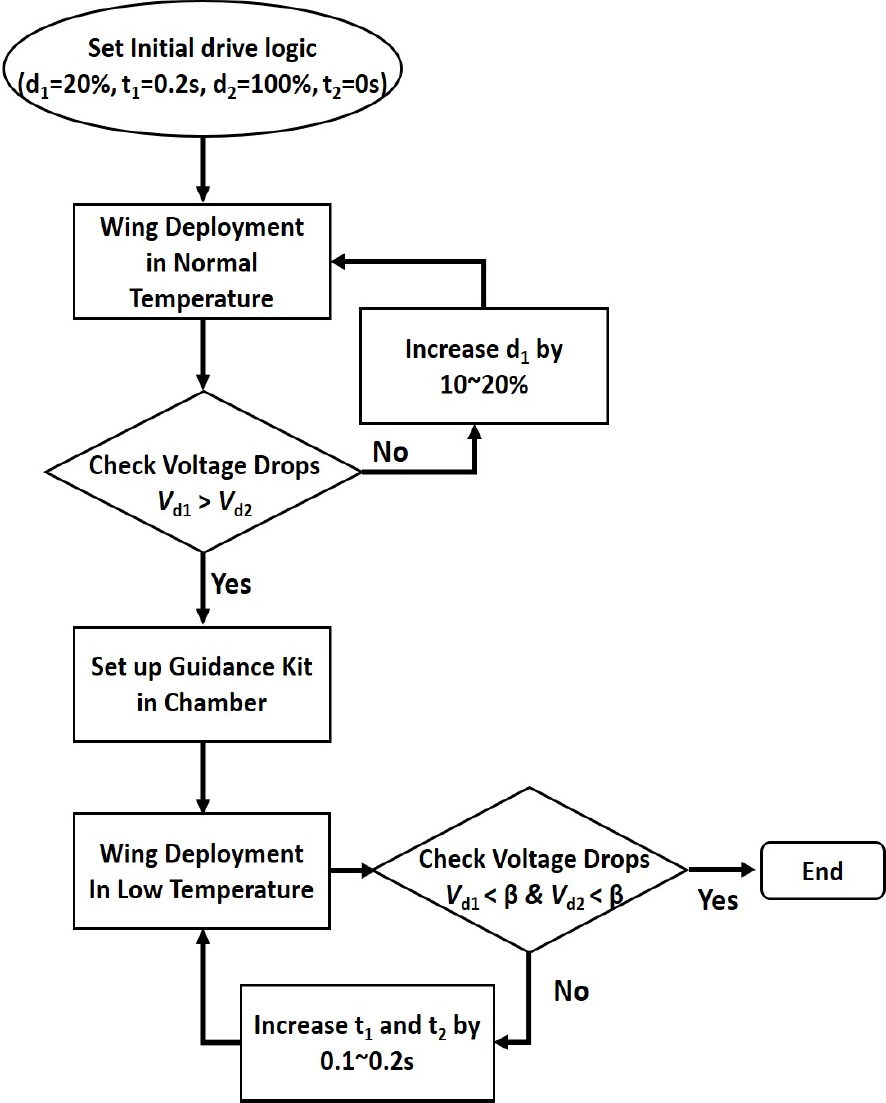
먼저 상온 시험에서는 저온에서 d2 달성 시점의 전류를 완화시키기 위한 d1을 정하기 위해 약 1 ms 간격으로 유도키트에 장착된 배터리의 전압을 확인하였다. 그리고 날개 전개를 수행하여 t1 동안의 배터리의 전압 강하(V d1)가 t1 이후의 전압 강하(V d2)보다 높은지 확인하여 만약, V d2이 V d1보다 크다면 d1을 10 % ∼ 20 % 더 증가시켜 모터 구동을 통해 날개 전개를 다시 수행하였다.
d1을 정한 다음에는 적절한 t1과 t2를 정해야한다. 하지만, 모터의 회전은 모터가 어느 정도의 가혹한 저온 환경에 얼마나 노출되는지에 따라 여러 영향을 받기 때문에 원하는 만큼의 최대 전류 완화를 위해 모터가 충분한 역기전력을 만들어내는 시점을 이론적으로 예측하기는 매우 어렵다.
따라서 제안하는 절차에서는 실제 유도키트가 가혹한 환경까지 노출될 수도 있는 점을 고려하여 Fig. 4와 같이 저온 챔버 내 배터리가 장착된 유도키트를 −54 ℃에서 1시간 이상 유지한 다음 날개 전개를 반복적으로 수행하였다. 그리고 수행하는 과정 중에 전압강하가 β 이상으로 발생하여 유도조종 시스템이 충분히 안정적일 수 있는 전압 이상을 만족하지 못한다면 t1과 t2를 증가시켰다. 여기서 t1과 t2가 필요 이상으로 너무 증가되면 날개가 전개되는 시간이 유도 성능에 영향을 미칠 만큼 길어져 버릴 수 있으므로 한 cycle 당 0.1 s ∼ 0.2 s씩만 증가시켜 1 s 내에 적절한 t1과 t2를 정하였다. Table 4에서는 피시험체의 주요 파라메타 요구 범위를 정리하였다.
Table 4.
System requirements for the stability
| Name | Requirement condition |
|---|---|
| System voltage (V) | > 19 |
| System current (A) | < 20 |
| Wing deployment time (s) | < 4 |
Table 5에서는 최종 선정된 구동 로직인 CASE 4와 최종 선정되기 전의 다른 로직들을 비교하였다. 그리고 Fig. 10과 Fig. 11에서는 해당 로직들로부터 수행한 유도키트 날개 전개에 대해 800 Hz 주기로 측정된 배터리 전압 결과를 나타냈다.
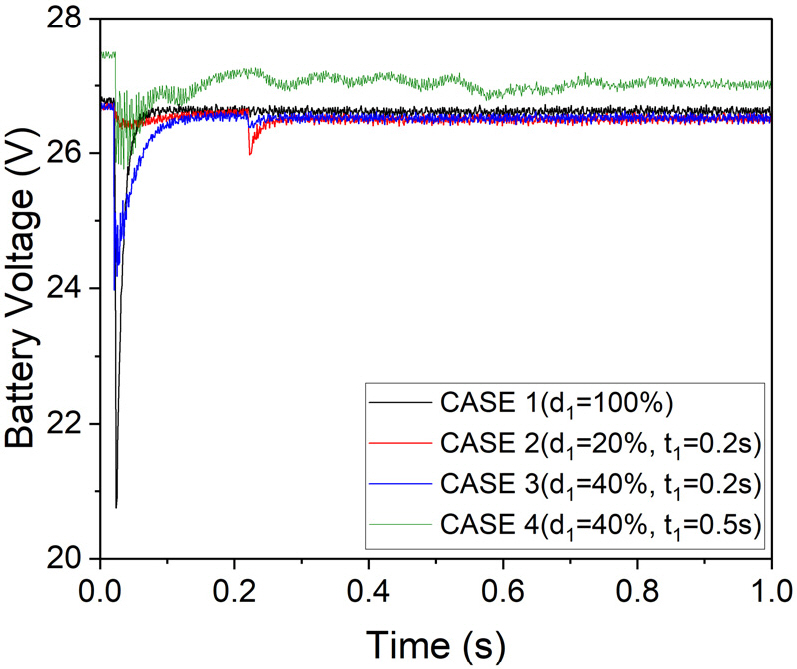
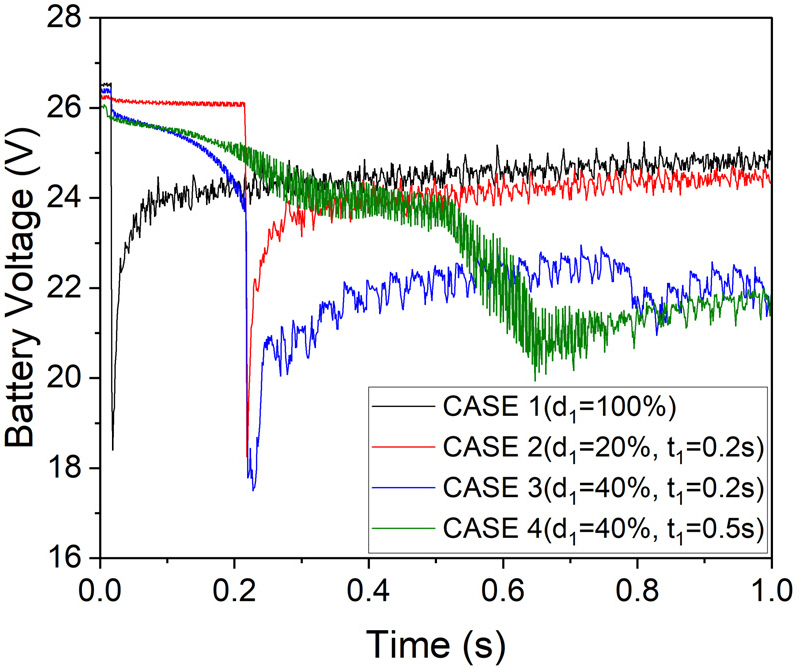
Table 5.
Comparison of applied motor logics in wing deployment test
CASE 1, 2, 3에서는 전압의 100 % duty cycle이 모터에 인가되는 부분에서 모터에서 큰 전류가 발생해 8 V 이상의 전압 강하가 발생함을 확인하였다. 다른 한편으로 CASE 4는 CASE 2 대비 d1을 20 % 증가시키고 t1와 t2에 대해 각각 0.3 s 증가시켰다. 그 결과, 날개 전개 시간(t wing)이 3 s까지 증가하였지만 이전 로직들 대비 전압 강하를 23 % 이상 완화시켜 Table 4의 요구치 범위를 만족함으로서 시스템의 안정성이 향상됨을 확인할 수 있었다.
결 론
본 논문에서는 항공 무장에 활용되는 유도키트에서 구동 모터를 통한 날개 전개 시 시스템 안정성을 향상시키기 위한 구동 모터 로직 설계 방안을 제안하였다. PWM 모터 구동 방식에 대한 안정적인 로직을 설계하기 위해 실제 유도키트가 활공하는 저온 범위에서 윤활유 점도 증가에 따른 모터의 전류 변화량을 확인하였다. 그리고 윤활유 점도가 높아지는 저온에서 모터의 돌입 전류를 완화시키기 위한 초기 전압에 대한 duty cycle을 40 %로 설정하였다. 또한, 저온에서 반복적인 날개 전개 시험을 통해 40 % duty cycle과 100 % duty cycle로 상승하는 적절한 시간을 1 s 내로 정하였다. 그 결과, 선정한 로직에 대한 날개 전개를 통해 배터리의 최대 전압강하가 23 % 이상 완화됨으로서 유도키트 시스템의 향상된 안정성을 확인할 수 있었다.
시스템 설계 요구조건에 따라 적용 가능한 모터 제어 방식이 있지만 본 연구에서는 PWM 방식을 시간에 따른 인가전압에 대한 초기 duty cycle을 제어함으로써 목적을 달성하였다. 다만 시험 수행을 위한 시스템 운용 환경 구현과 반복적인 시험에서의 다소 많은 작업 및 시간 소요 등이 요구되는 점이 있었으며 추후 연구를 통해 이러한 점이 해소될 필요가 있다고 판단하였다.
만약, 시뮬레이션 등으로 시스템 운용 환경이 구현된다면 제안하는 구동 로직 설계 방안은 다른 시스템 요구조건에 맞게 비교적 쉽게 변형 적용하여 가혹한 환경에서 전기식 구동모터를 작동시켜야하는 무기체계 시스템의 안정성을 확보하는데 큰 도움이 될 수 있을 것이다.




