진동분석을 통한 회전익 드론의 블레이드 착빙 예지
Prognosis of Blade Icing of Rotorcraft Drones through Vibration Analysis
Article information
Trans Abstract
Weather is one of the main causes of aircraft accidents, and among the phenomena caused by weather, icing is a phenomenon in which an ice layer is formed when an object exposed to an atmosphere below a freezing temperature collides with supercooled water droplets. If this phenomenon occurs in the rotor blades, it causes defects such as severe vibration in the airframe and eventually leads to loss of control and an accident. Therefore, it is necessary to foresee the icing situation so that it can ascend and descend at an altitude without a freezing point. In this study, vibration data in normal and faulty conditions was acquired, data features were extracted, and vibration was predicted through deep learning-based algorithms such as CNN, LSTM, CNN-LSTM, Transformer, and TCN, and performance was compared to evaluate blade icing. A method for minimizing operating loss is suggested.
1. 서 론
4차 산업혁명에 들어선 현재 사회는 로봇공학, 인공지능, 빅데이터, IoT, 무인자율 등 최첨단 기술이 발전하는 새로운 시대의 중심에 있다. 이중 인공지능은 대량의 데이터 저장기술, 컴퓨터의 능력 향상, 머신러닝 및 딥러닝과 같은 알고리즘의 발달로 빅데이터, 모바일과 같은 여러 기술과의 연계가 가능하여 4차 산업혁명의 핵심기술로 주목받고 있다[1-2].
4차 산업혁명과 함께 성장한 드론 산업은 현재 급격히 팽창 중이며, 세계 방위산업 분야에서도 드론을 ICT, SW, 센서 등 첨단기술의 융복합시스템으로 인식하여 정찰용, 공격용, 지원용 등 다양한 드론 개발을 위한 연구를 진행 중이다[3]. 드론을 군용 무기체계로 활용하는 경우, 임무에 따라 전천후 운용을 요구하기 때문에 군용 드론은 작전 지역에 따라 여러 기상 상황에 노출하게 된다.
기상은 2003∼2007년 사이에 미국에서 발생한 항공기 사고의 20 % 이상을 차지할 정도로 비행체에는 중요 사고요인 중 하나이며[4], 그중 착빙은 결빙되는 온도 이하의 대기에 노출된 항공기가 과냉각 수적 혹은 구름 입자와 충돌하여 얼음층이 형성되는 현상으로 항공기 운용에 치명적인 결함을 유발한다[5]. 착빙 현상이 항공기의 블레이드에 발생하게 되면 항공기에 여러 문제를 야기하는데, 특히 회전익 항공기의 경우 착빙은 양력과 로터의 추력을 감소시키며 심한 진동을 유발한다[6,7]. 일부 연구에 따르면, 회전익 항공기의 착빙이 정상 운용에 비해 최대 70 %의 추력 손실을 유발하고, 전력 소비를 최대 250 % 증가시킬 수 있음을 확인할 수 있었으며[8], 비행 중 이러한 착빙위험에 드론이 노출된다면 드론은 통제력을 상실하게 되어 사고로 연결될 수 있다. 그러므로 드론이 자신의 상태를 파악하고 착빙이 발생하지 않는 고도로 상승 및 하강 비행을 할 수 있도록 사전에 진단하는 예지 기능이 필요하다.
따라서, 본 연구에서는 드론을 대상으로 실험을 통해 정상상태와 착빙을 유도한 비정상 상태의 진동 데이터를 수집하고, 획득된 데이터를 바탕으로 특징을 추출하여 정상과 비정상 상태의 차이를 확인하였다. 이후 딥러닝 기법을 적용하여 블레이드의 착빙을 예측하고, 모델의 정확성을 나타내는 여러 가지 척도를 통해 성능을 평가하였다.
2. 실험 장치 및 방법
드론을 대상으로 정상과 비정상 상태의 데이터를 획득하기 위해 Fig. 1과 같이 전원공급장치, 드론, 블레이드, 가속도 센서 등으로 실험 환경을 구성하였으며, 사용한 드론의 사양은 Table 1과 같고, 블레이드는 13,200 rpm으로 운용하였다. 드론에 부착된 가속도 센서와 DAQ를 이용하여 실시간으로 진동 데이터를 수집하였으며, 장기간 데이터 수집을 위해 전원공급장치를 사용함으로써 유선 드론의 형식으로 운용하였다.

Drone data acquisition system diagram

Specification of drone
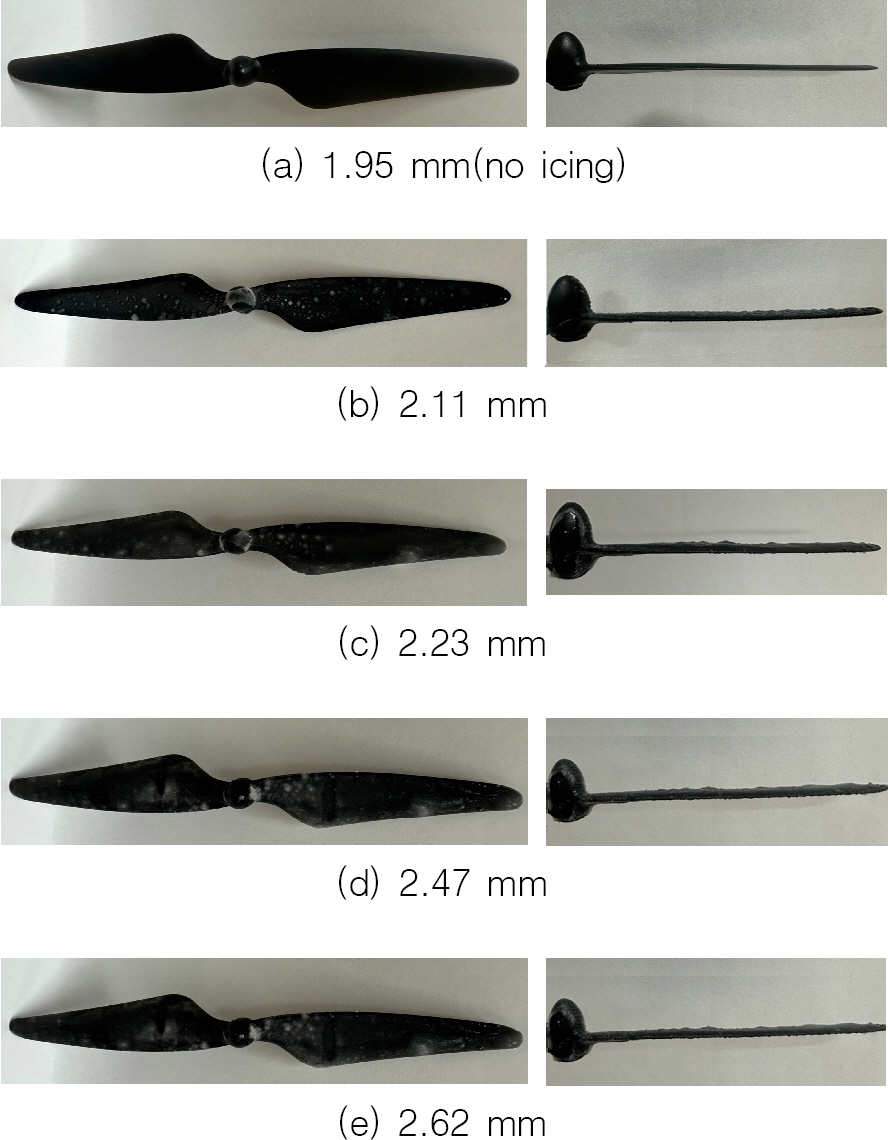
자연환경에서 블레이드의 일정한 결빙조건을 구현하는 것은 매우 어렵기 때문에 인공 결빙조건을 묘사하여 적용하였다[9]. −10 ℃를 유지하는 저온 챔버에서 블레이드를 향해 물을 3회씩 분사하여 Fig. 2와 같이 얼음층을 생성하였으며, 이때 블레이드의 최대 두께는 각각 1.95(착빙 미실시), 2.11, 2.23, 2.47, 2.62 mm이다. 사진에서 좌측은 블레이드 전체를 상부에서 촬영한 모습이고, 우측은 블레이드 절반을 확대하여 정면에서 촬영한 내용이다.
Thickness of blades after icing
3. 데이터 수집 및 특징 추출
3.1 데이터 수집
드론 블레이드 착빙 전과 착빙 두께별 진동 변화를 분석하여 고장을 사전에 예지하기 위해 데이터를 29,640,000개 수집하였다. 이때, 데이터 획득 중 샘플링 속도가 너무 빠른 경우 데이터의 노이즈 발생이 컸으며, 이는 딥러닝 학습에 방해요소로 작용하기 때문에 샘플링 속도를 25.6 ks/s로 설정하여 데이터를 수집하였다. 착빙 전과 착빙 두께별 진동 데이터는 Fig. 3과 같으며, 착빙이 발생하면서 착빙 전인 정상상태에 비해 진폭이 상승하였다. 착빙 두께 변화에 따른 최대 피크값과 평균 피크값은 Table 2와 같이 착빙의 두께가 증가함에 따라 드론의 진폭이 증가하였으며, 블레이드 두께가 2.47 mm 이상의 경우 진동의 평균 피크값이 2배 이상 커졌다. 특히, 블레이드 두께가 2.62 mm의 경우 진동이 커 정상적인 드론 운용이 제한되었다.

Vibration data due to blade thickness variation

Value peak of vibration data
획득한 데이터를 이용하여 착빙으로 유발된 블레이드의 과도한 진동을 진단 및 예지하기 위해서는 모델에 적합한 형태로 데이터를 전처리해야 한다. 이를 위해 시계열 데이터를 주파수 영역으로 변경시키는 일반적인 방법으로 FFT(Fast Fourier Transform)가 있으나, 샘플링에 따라 주파수 분해능이 떨어지고, CNN(Convolution Neural Network)과 같이 필터를 사용하는 모델은 필터의 크기에 따라 특징점의 패턴을 분석하기 어려운 경우가 발생한다[10]. 이러한 문제점을 해결하기 위해 연속 웨이블릿 변환(CWT: Continous Wavelet Transform) 데이터를 딥러닝에 적용할 수 있다[11].
드론에서 추출된 진동데이터를 식 (1)과 같은 방정식을 통해 웨이블릿 변환을 수행하였으며, 드론에서 발생하는 진동의 주파수와 진폭 등을 파악함으로써 정상상태와 착빙상태의 차이를 확인할 수 있었다.
3.2 특징 추출
드론 블레이드의 착빙현상을 예측하기 위해 정상 및 결빙상태의 데이터를 가속도 센서를 통해 수집하였다. 그러나. 수집된 시간 영역의 데이터를 통해서 상태를 판단하는 것은 쉽지 않기 때문에 딥러닝 모델이 데이터를 구분할 수 있도록 특징을 추출하는 과정을 거쳐야 한다. 통계적 방법을 통해 13개의 특징을 추출하였으며, 추출된 특징들의 상관관계를 확인하기 위해 Fig. 4와 같이 상관관계를 히트맵으로 시각화하였다. 상관계수는 두 변수 간의 공분산을 표준편차로 나눈 수치로 −1에서 +1까지의 값을 가지게 된다. 변수 간 상관계수에 따라 계수가 1(-1)에 수렴하면 양(음)의 상관관계를 가짐을 의미한다.

Correlation heatmap
상관계수가 높은 변수들을 모델에 적용할 경우 과적합이 발생하여 부적절한 결과가 발생할 수 있기 때문에 Table 3과 같이 상관관계가 낮은 평균(Mean), 제곱합 평균의 제곱근(Root Mean Squrare), 첨도(Kurtosis), 왜도(Skewness)와 주어진 시간 간격 내 진동신호의 피크값과 RMS 값의 비를 나타내는 융기인자(Crest Factor)를 특징으로 선정하여 딥러닝 모델 적용에 적용하였다[12,13].

Data feature extraction
4. 고장예지 모델 개발
4.1 딥러닝 모델
일반적으로 고장 예지를 수행하기 위한 모델로 인공신경망과 회귀를 이용한 기법을 많이 사용하고 있으나, 회귀기법은 비선형 데이터를 활용하기 어려우며, 시계열 데이터는 비선형성을 따를 수 있기 때문에 인공신경망을 이용한 딥러닝 모델로 시계열 데이터의 입⸱출력 사이의 복잡한 관계를 학습토록 하였다.
학습에 사용한 알고리즘은 CNN, LSTM, CNN-LSTM, TCN, Transfomer로 알고리즘 모델에 대한 구성은 Table 4와 같다. CNN 모델은 주로 이미지를 인식하여 분류하는 모델로 알려져 있으나, 가속도계 데이터와 같이 1차원 시계열의 데이터 분석에 적합하게 1차원의 합성곱으로 구성하여 Convolution Layer와 Pooling Layer 를 통해 주요 특징을 파악할 수 있게 하였으며, 추출된 특징을 Flatten Layer를 통해 1차원 데이터로 변환해 예측을 진행하였다. 그리고 LSTM 모델은 시계열 데이터를 예측하는데 사용하는 대표적인 모델이며, 기존의 LSTM의 성능을 향상시키기 위해 고안된 CNN 기반 특징 융합레이어와 LSTM 기반 시계열 예측 레이어로 구성되어 있는 CNN-LSTM 모델을 사용하였다. 시퀀스 데이터를 처리하기 위해 설계된 딥러닝 모델로 기존 RNN이나 LSTM 모델과 비교하여 계산 효율성과 성능 면에서 여러 장점을 보여주는 TCN 모델과 자연어 처리에 유용한 Transformer 모델을 적용하였다.

Deep learning composition
딥러닝 모델의 최적화를 위해 각각의 네트워크 층에서 파라미터를 최적화하는 방법인 Adam 최적화 기법을 적용하였으며[14], 실제값과 예측값의 차이를 수치화해주는 손실 함수는 연속형 변수를 예측할 때 사용되는 평균 제곱 오차(MSE, Mean Squared Error)를 사용하였다. 또한, Epoch 수를 2,000회로 설정하고 과도한 학습으로 인한 과적합을 방지하기 위해 Early Stopping Callback 함수를 적용하여 학습 진행중에 손실값이 20회 이상 감소하지 않으면 학습을 조기에 종료시키는 방법을 적용하였다[15].
4.2 모델 학습 결과
딥러닝 모델의 학습 과정을 평가하기 위해 주요 평가지표 중 하나인 손실값을 Fig. 5와 같이 나타내었다. 학습 초기에 Epoch가 낮아 Loss값이 크고 Accuracy가 다소 낮은 경향을 보이고 있으나, Epoch가 점차 증가 하면서 고장예지 모델들이 실제와 예측값의 오차를 감소시키는 학습을 진행하였다. 또한, Early Stopping 함수에 의해 예지 모델들이 과적합을 방지하고 최적의 성능을 보이고 있음을 알 수 있다.

Loss function
모델학습 후 예측성능을 평가하기 위한 지표로 평균 제곱근 오차(Root Mean Square Error)와 평균 절대 오차(MAE)를 사용하였다. 일반적으로 평균 절대비율 오차(MAPE: Mean Absolute Percentage Error)가 예측모델을 평가하는 지표로 사용되나 예측값이 0이 있거나 혹은 0에 근접하는 경우 값이 매우 커지거나 계산이 불가능한 단점이 있기 때문에 식 (2)와 식 (3)과 같이 정의되는 RMSE와 MAE를 성능지표로 사용하였다[16].
RMSE와 MAE는 0에 가까울수록 예측의 정확도가 높다고 판단할 수 있으며, 결과를 Table 5에 나타내었다. RMSE와 MAE 값은 TCN, Transformer, CNN-LSTM, LSTM, CNN 순으로 높은 예측의 정확성을 보이고 있다. 정량화된 지표에 의한 성능 분석 뿐만 아니라 예측에 대한 추세를 가시적으로 확인하기 위해 모델의 예측을 Fig. 6과 같이 나타내었다. 그림과 같이 전체적으로 진동데이터의 작은 피크값들을 예측하고 있으나, Transformer 모델의 경우 큰 피크에 대해서 특징 학습이 떨어지는 것으로 보아 상대적으로 작은 진폭에 대한 학습능력이 뛰어난 것으로 보인다.

Specification of Drone

Prognosis visualization
RMSE, MAE와 같은 성능지표와 달리 그래프에서 보이는 성능을 재확인하기 위해 Transformer 모델을 제외한 다른 4가지 모델에서 일정 수준 이상의 오차들을 산출해 평균을 내어 Table 6과 같이 모델들의 예측오차 수준을 나타내었다. 표로부터 TCN, CNN-LSTM, LSTM, CNN 순으로 성능이 우수함을 확인할 수 있었으며, TCN 모델이 다른 모델에 비해 크고 작은 진폭에 대해 더 정확한 예측을 하였다.

Mean peak prediction error
따라서, 딥러닝을 기반으로 한 TCN 모델을 통해 드론 블레이드의 착빙을 예측하고, 운용자에게 예측정보를 전달하여 드론의 고도 하강 혹은 지역 이탈 등의 행동을 취할 수 있다면, 드론의 신뢰성 있는 운용이 가능할 것으로 판단된다.
5. 결 론
드론을 운용하는데 있어 기상의 영향을 고려한 결함 중 하나인 블레이드 착빙에 대해 정상 및 비정상 상태의 차이를 확인하고, 모델별 고장예지 성능을 비교 분석하였다. 본 연구를 통해 얻어진 결과를 요약하면 다음과 같다.
1) RMSE와 MAE 값은 TCN, Transformer, CNN-LSTM, LSTM, CNN 순으로 우수한 결과를 제시하였다.
2) TCN 모델은 평균 피크 오차에서 가장 좋은 성능을 나타내어 드론 블레이드의 착빙 예지에 가장 적합하다.
3) TCN 모델을 통해 착빙에 대한 고장예지를 수행 시 운용자에게 정확한 예측정보를 전달하여 드론 운용에 있어 신뢰성을 확보할 수 있을 것으로 판단된다.
후 기
본 논문은 과학기술정보통신부 및 정보통신기획평가원의 지역지능화혁신인재양성사업(Grand ICT연구센터, IITP-2023-2020-0-01612)의 연구결과로 개발된 결과물이며, 이에 감사드립니다.