이중 전동식 진동 시험기를 이용한 무인 비행체의 비행진동 환경시험 연구
A Study On Flight Vibration Environmental Test of Unmanned Aerial Vehicle using Dual Electric Vibration Exciters
Article information
Trans Abstract
Analysis of dynamic characteristics and flight vibration test for unmanned aerial vehicles was studied by using dummy test body. The FEM model for dummy test body was supplemented by results of modal and random vibration test. The free end boundary condition to simulate flight environments was made by test setup using bungee cable. Prior to the flight vibration test using a dual electric vibration exciters, the test procedure to calculate quantitative vibration level was studied by using military specification. The actual test was successfully done by using the analysis and pretest results. From the analysis results, it was possible to determine the feasibility of the test by predicting the excitation force of the flight vibration test and to get the response of any point which could not be measured by the test. The results of this study will much contribute to the Test and Evaluation of unmanned aerial vehicles.
1. 서 론
체계 수준의 무인 비행체의 비행진동 환경시험은 적합한 환경 규격의 정의, 적당한 시험 장치의 구성 및 적절한 시험 절차 등에 대한 연구가 선행되어야 한다. 선행 연구로부터 무인 비행체와 유사한 물리적 특성을 갖는 더미 시험체를 제작하였다[1]. 동특성 및 랜덤 진동 해석과 시험 결과로부터 실제 시험에 요구되는 가진력을 예측하여 진동시험의 수행 가능성을 먼저 판단하였다.
본 논문은 무인 비행체의 비행 진동 환경 시험을 대비하여 가진력을 예측한 결과를 기반으로 이중 전동식 진동시험기를 이용한 더미 시험체의 비행진동 시험에 대하여 다루었다. 본 연구에 적용된 더미 시험체의 비행진동 시험으로부터 향후 수행될 실제 무인 비행체에 대한 비행진동 환경시험의 수행 가능성을 예측할 수 있을 것으로 판단된다. 본 연구에서 수행되 사전 시험 결과를 반영한 동특성 해석 모델을 이용하여 더미 시험체의 다양한 위치에서의 진동 양상 예측이 가능할 것으로 판단된다. 본 논문에서는 정량적인 비행진동 환경시험 절차에 대하여 먼저 논의하고 해석 및 시험 결과를 이용한 해석 모델의 업데이트를 수행하였다. 그리고 더미 시험체의 비행진동 시험을 위한 시험 구성, 사전 시험 및 본 시험 수행 절차를 확립하여 향후 진행될 실제 무인 비행체의 시험평가 분야에 활용될 수 있도록 하였다.
2. 비행진동 시험 절차 검토
2.1 시험 장치 구성
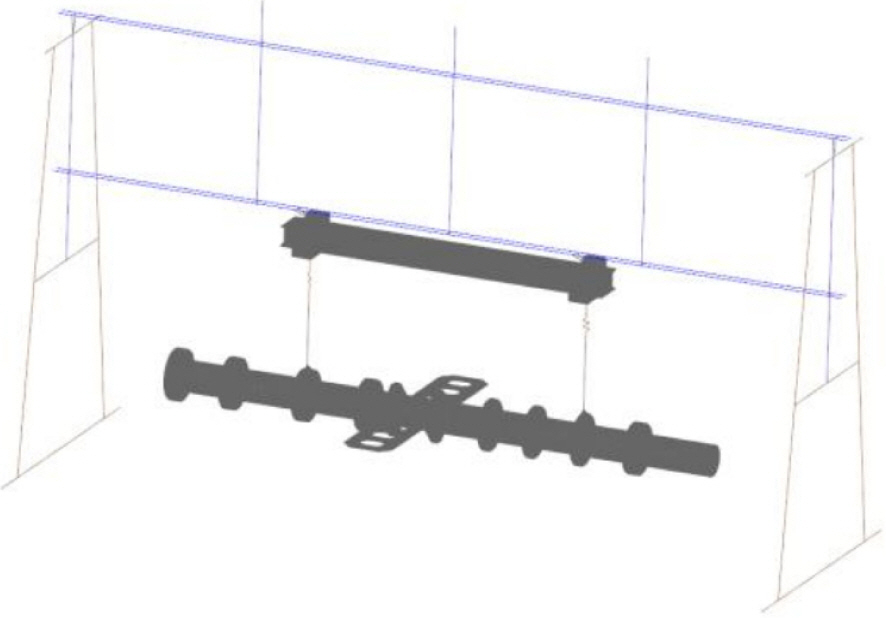
아래 Fig. 2는 시험 장치에 더미 시험체가 조립되어 이중 전동식 진동시험기에 장착된 개념도를 보여주고 있다. 이중 전동식 진동시험기는 전방과 후방 2개의 가진기로 구성되며 더미 시험체를 스팅어를 이용하여 진동시킨다. 본 연구를 위해 제작된 Fig. 3의 더미 시험체는 댐핑 특성이 거의 없는 구조 강재(Structure Steel)로만 제작되었고, 무인 비행체의 감쇠 값과 유사한 감쇠 효과를 부여하기 위해 내부에 약 200 kg 정도의 모래주머니를 장착할 수 있도록 하였다. 동특성 시험 결과로부터 모래주머니의 분포를 변경시킴으로써 더미 시험체의 감쇠 효과를 실제 무인 비행체와 유사하게 변경시켜 진동 시험에 적용하였다. 더미 시험체와 가진기의 스팅어는 본 연구에서 제작한 클램프를 적용하였다. 시험 중 적용된 클램프의 재질과 체결력이 가진기 제어를 위한 진동 시험의 중요한 인자임이 확인되어 이에 대한 추가적인 검토를 수행하였다.

Concept of test configurations

Dummy test body
2.2 시험 절차 검토
본 비행진동 시험은 MIL-STD-810G/Method 514.7 4.5 Test Execution 4.5.5의 시험 절차를 준용하여 수행되었다[3]. 비행진동 시험을 위해 사전 시험(Pretest) 단계에서 주변 환경 계측으로부터 환경 노이즈 레벨 확인, 강체 모드 주파수 확인 및 조절, 충격 해머를 이용한 주파수 응답 함수 계측으로부터 고유 모드 추출, 상반성 및 반복성 확인 시험으로부터 최적의 센서 장착 위치 및 가진 위치를 선정하였다. 특히 충격 해머를 이용한 모달 시험을 실시하여 더미 시험체와 시험장치의 조립체에 대한 시스템 특성 확인 및 시험 구성의 모드 세트를 추출하였다.
사전 시험이 정상 종료되어 시험 조건에 대한 시험 장치의 설정 값이 결정되었고 이후 더미 시험체의 횡 방향 및 수직 방향 각각에 대한 진동 시험을 진행하였다. 본 연구에서 적용한 진동 시험 절차를 단계별로 정리하면 다음과 같다.
Step 1. 더미 시험체의 강체 모드 주파수 계측 및 요구 기능을 만족하는지 확인
Step 2. 더미 시험체의 모달 시험 수행(시험 전후 동특성 변화 확인을 위함)
Step 3. 더미 시험체 상태 확인 및 시험 구성에 대한 육안검사 수행
Step 4. 진동 시험기 상태 확인을 위한 저 레벨 진동시험 수행
Step 5. 진동 시험기를 조절하여 모니터링 센서에서 가진축을 시험 조건에 적합하도록 설정
Step 6. 가진축의 입력 응답(R1)을 만족하도록 입력 진동을 조정할 때, 비정렬(off-axis) 축 응답(R2, R3)을 계측하고 식 (1)을 사용하여 비정렬 축 응답 수준 확인.
Step 7. 가진 프로파일 만족여부를 확인
Step 8. 시험중 진동 레벨과 시험체 상태 모니터링
Step 9. 60분 이상 시험 수행 후 가진 종료
Step 10. 시험체 및 시험 구성에 대한 시험 후 검사
Step 11. 가진축을 변경하여 1 ∼ 10단계 반복 수행
Step 12. 시험 종료 후 시험체의 기계적 상태 확인
위 식에서,
Ri = Response level [g2/Hz] for i=1∼3
Ai = Test requirement level [g2/Hz] for i=1∼3
2.3 이중 전동식 진동시험기 제어 알고리즘
본 연구에서 적용된 진동시험기에는 더미 시험체의 형상과 중량을 고려하여 Fig. 4와 같은 MIMO(Multiple Input Multiple Output) 제어 알고리즘이 적용되었다. 비행진동 규격으로 랜덤 진동시험 중 가속도 자료를 수집하여 이에 대한 평균 PSD 값을 계산하고 아래 식 (2)를 적용하여 평균 PSD 값을 업데이트한다. 업데이트된 PSD 값에 대한 진동시험기의 알람 등 이상 유무를 확인하고 문제가 없다면 역 전달 함수(Inverse Transfer Function)을 계산하여 가진기의 피드백 제어 값으로 적용한다[4].
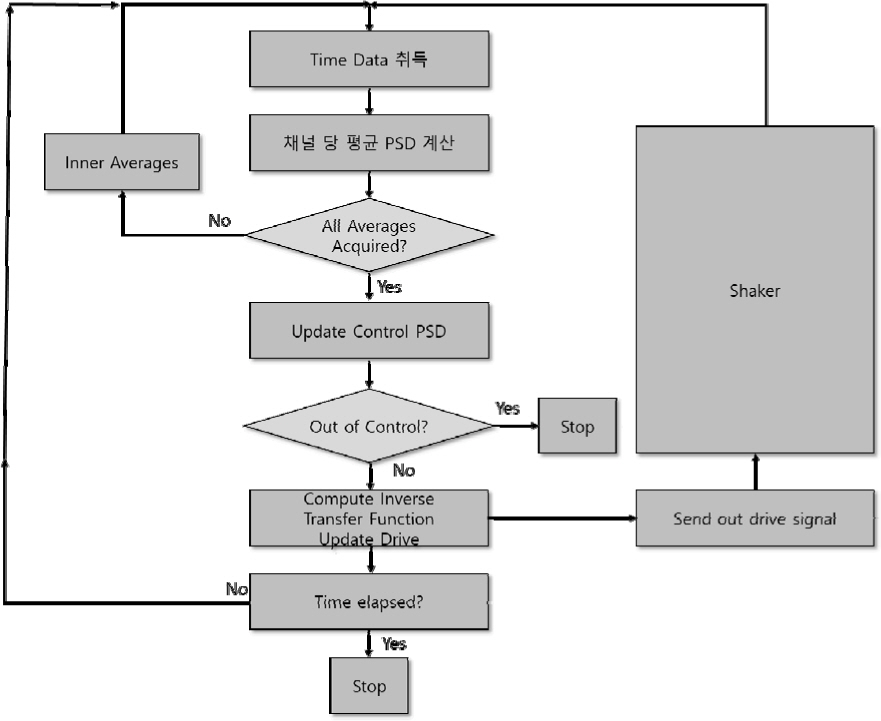
MIMO random control algorithm
위 식에서,
j: the control loop count
Gj+1: the current estimate of the control PSD
W: the exponential weighting factor
3. 사전 해석 및 시험 장치 구성
비행진동 시험에 앞서 랜덤 진동 해석 결과와 동특성 시험에서 획득한 주파수 응답 함수를 포함하고 있는 시험 모델을 이용하여 시험 구성의 안전성과 가진 프로파일의 만족 여부를 검토하였다.
3.1 해석 모델을 이용한 검토
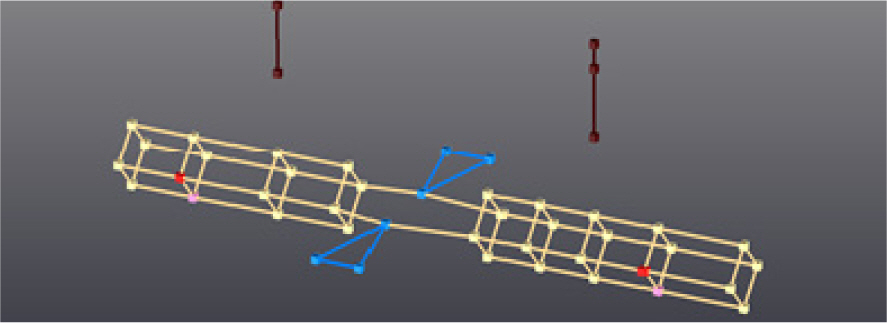
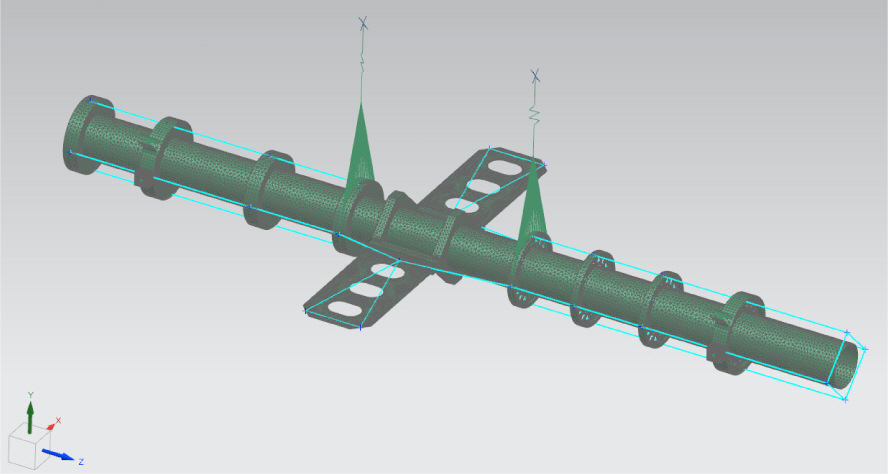
시험 전 비행진동 시험 해석 모델로부터 가진 위치 및 가진력 예측, 적용 가속도 센서의 스펙 만족 예측, 가진기 제어 센서의 응답 예측 그리고 더미 시험체와 시험 구성의 안정성을 확인하였다, Fig. 5는 Fig. 1의 시험 구성을 해석 모델로 구성한 것으로 시험구성과 더미 시험체의 해석 모델을 1차원, 2차원 및 3차원 유한 요소를 이용하여 작성하였다. 시험 구성을 검토하여 Fig. 6과 같이 수평축(Lateral Axis) 및 수직축(Vertical Axis) 시험을 위한 가진 위치를 선정하고 가진 위치에 가장 근접한 클램프에 모니터링 센서를 위치시켰다.
Analysis modeling of test configuration
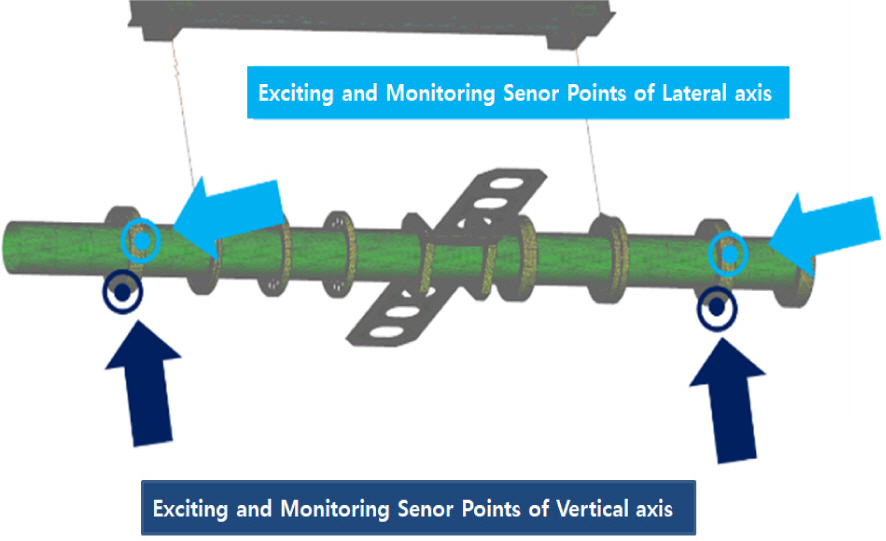
Modeling of excitation points and monitoring sensors
본 해석에서는 가진력을 보수적으로 계산하기 위해 다음과 같은 조건을 가정하였다. 시스템 감쇠는 3 % 로 가정하고 스펙트럼 밀도 행렬(Spectral Density Matrix)의 비대각 성분(Cross Spectral Density)은 식 (3)을 적용하여 계산하였다. 식 (3)에서 2개 가진기는 동일 위상(ψjk = 0)으로 진동하며 γjk = 0.05 즉, 낮은 상관(Coherence) 관계로 가정하였다[5]. 첨자 j, k는 각각 전방 및 후방 가진기를 의미한다.
수평축 및 수직축 가진력 해석 결과는 Fig. 7∼8과 같다. 모니터링 센서 위치에서의 PSD 응답은 Fig. 7과 같이 비행진동 가진 프로파일과 동일하다. 가진 위치에서 응답력은 Fig. 8로부터 1 Hz의 분해능으로 3σ를 적용하여 계산한 결과 전방 및 후방 가진 위치에서 수평축 시험의 경우 각각 101,184 Nrms, 96,180 Nrms 로 계산되었다. 수직축의 경우도 수평축과 같은 방법으로 해석하여 전방 가진 위치에서 110,073 Nrms, 후방 가진 위치에서 108,650 Nrms로 계산되었다. 본 결과는 랜덤 진동시험으로부터 계산된 결과와 어느 정도 유사하였다[1].
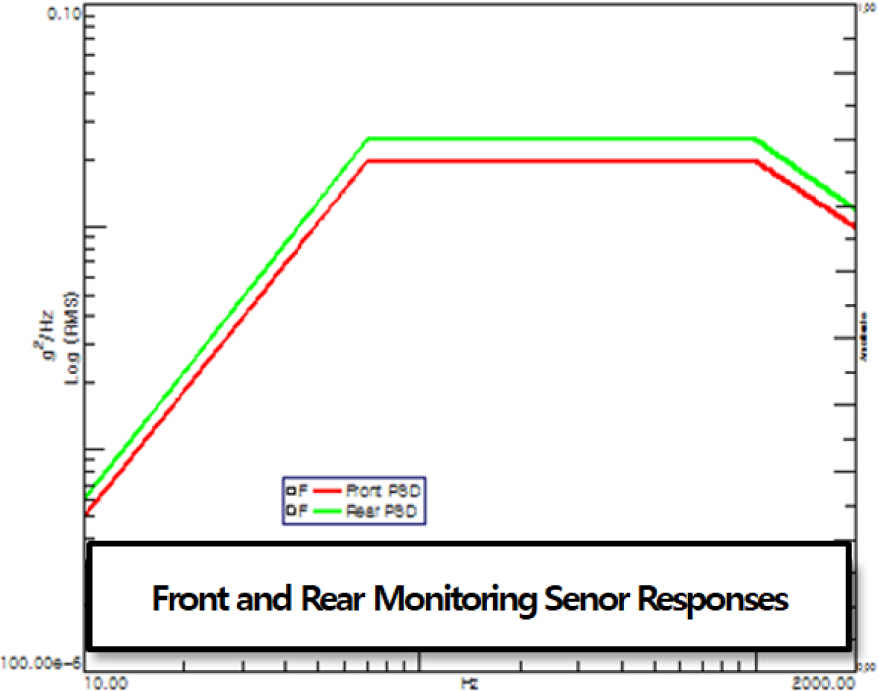
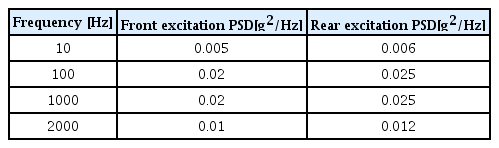
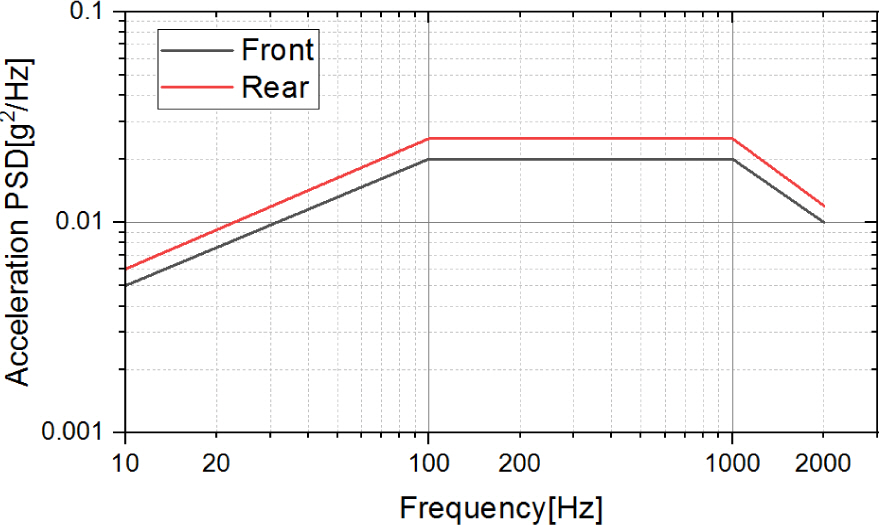
Input acceleration PSD profiles
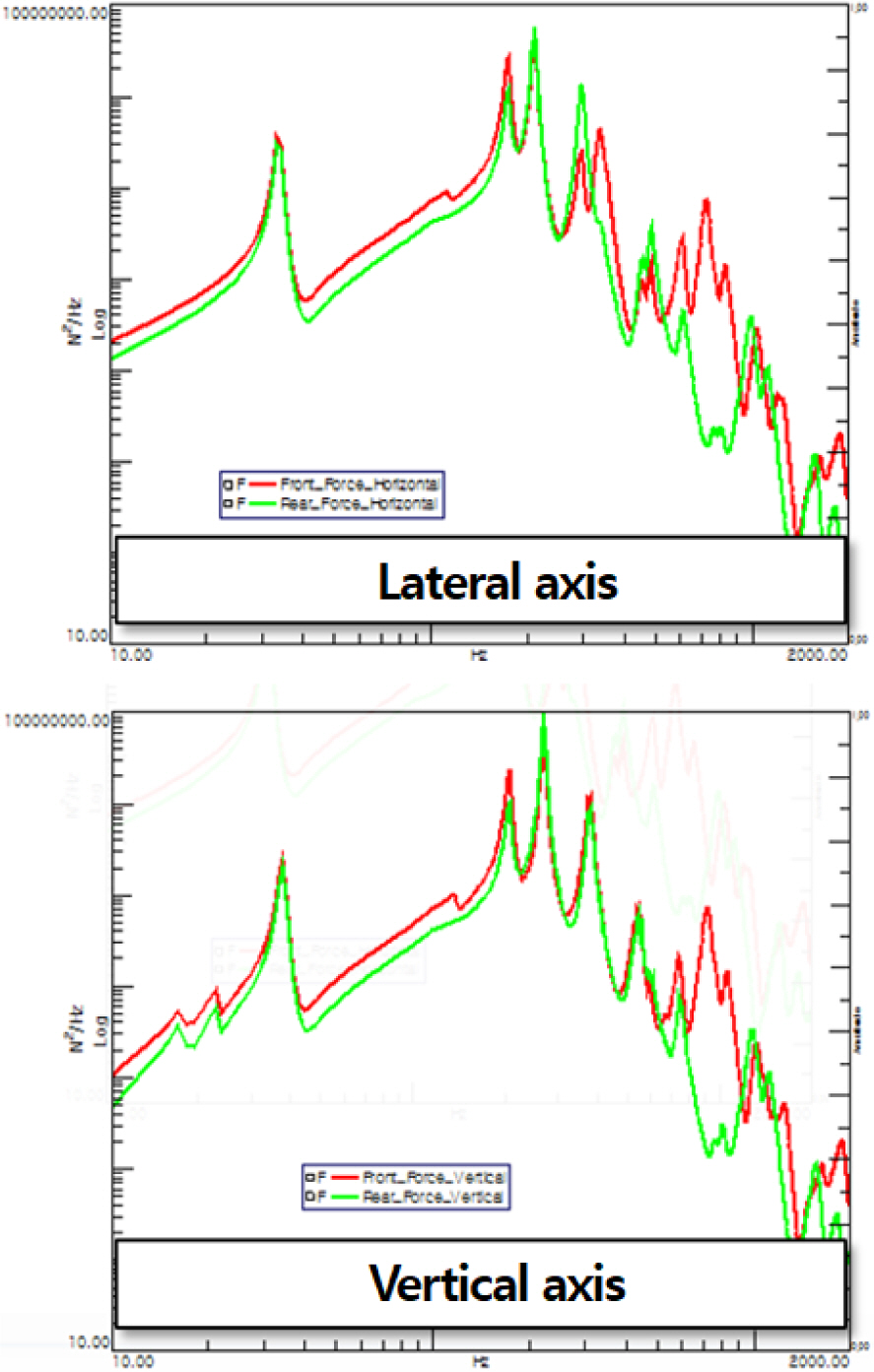
Analysis results of exciting force PSD
3.2 시험 장치 구성
위의 해석 결과를 기반으로 더미 시험체에 대한 비행진동 시험이 수평축 및 수직축에 대하여 각각 1시간 이상을 가진하는 방식으로 수행되었다. Fig. 9는 수평축 및 수직축에 대한 시험 구성을 보여주고 있다. Fig. 10과 Table 2에 비행진동 시험에 적용한 가속도 센서 들의 장착 위치와 계측 채널 할당 내역에 관하여 나타내었다. 시험에 적용된 계측 장비 H/W는 지멘스(Simense) 사의 SCADAS vibco를 S/W는 동일 회사의 테스트랩(Testlab)을 사용하였다.
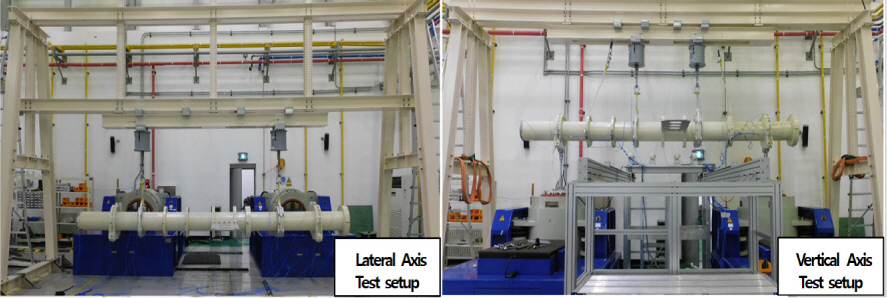
Test configuration of dummy test body
Arrangement of acceleration sensors

Measurement channels contents
본 시험에 앞서 정량적인 시험 환경 구성을 위한 사전 시험으로 시험 구성의 강체 모드를 확인하기 위한 강체 모드(Suspension Mode) 확인 시험, 주위 환경 잡음의 크기를 확인하기 위한 주변 잡음(Ambient Noise) 계측, 시험 구성의 상반성(Reciprocity)과 반복성(Repeatability) 확인 시험 결과로부터 본 비행진동 시험 구성의 적합성을 확인하였다.
수평축 시험 구성의 강체 모드 주파수 검사 결과 더미 시험체 전방부가 주로 움직이는 4 Hz와 후방부가 주로 움직이는 6 Hz가 계측되었다. 수직축 시험 구성에 대한 강체 모드 주파수는 4.3 Hz로 계측되었다. 군사 규격에서 강체 모드가 5 ∼ 20 Hz 범위에 존재하도록 요구하고 있으므로 향후 시험평가 대상이 되는 무인 비행체의 환경시험에서는 스프링 강성을 증가시킬 예정이다[2]. 주변 환경 노이즈의 측정 결과 대부분의 주파수 영역에서 약 100배 이상의 차이를 보여주고 있음을 확인하였다. 시험 구성의 상반성 확인은 더미 시험체의 서로 다른 2개 위치에 대한 충격 해머 시험을 통하여 0∼150 Hz 구간에 대한 주파수 응답 함수의 일치성을 비교 검토하는 것으로 수행하였다. 시험 결과로부터 상반성이 충분히 성립하여 선형으로 판단할 수 있었다. 시험 구성의 반복성 확인 시험은 충격 해머를 이용하여 측정된 상관성을 비교하여 수행하였고 잘 일치하고 있음을 확인하였다.
3.3 동특성 시험
시험 구성에 대하여 이중 전동식 진동시험기와 연결하지 않은 자유단 경계 조건에 대한 충격 해머 시험으로부터 수평축 및 수직축에 대한 동특성 시험을 수행하였다. 동특성 시험으로부터 주파수 응답 함수를 측정하였고 더미 시험체의 고유 진동수 및 고유 모드를 확인하였다. Fig. 11과 12에 수평축 및 수직축에 대한 동특성 시험 결과를 보였다. 비행진동 시험 전과 후 동특성 시험 결과를 비교함으로써 시험체의 기계적 저하 징후를 간접적으로 확인할 수 있었다. 향후 더미 시험체의 동특성 시험 결과와 무인 비행체의 동특성 시험 결과를 비교하면 실제 무인 비행체 비행진동 시험에 대한 가진기의 제어 성능을 예측할 수 있을 것으로 판단된다.
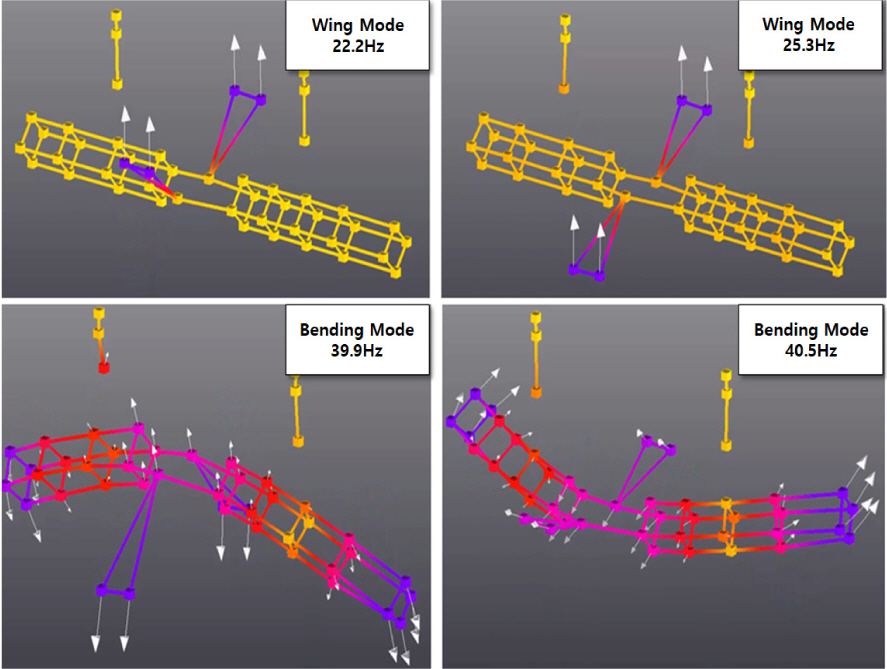
Results of modal test about lateral axis
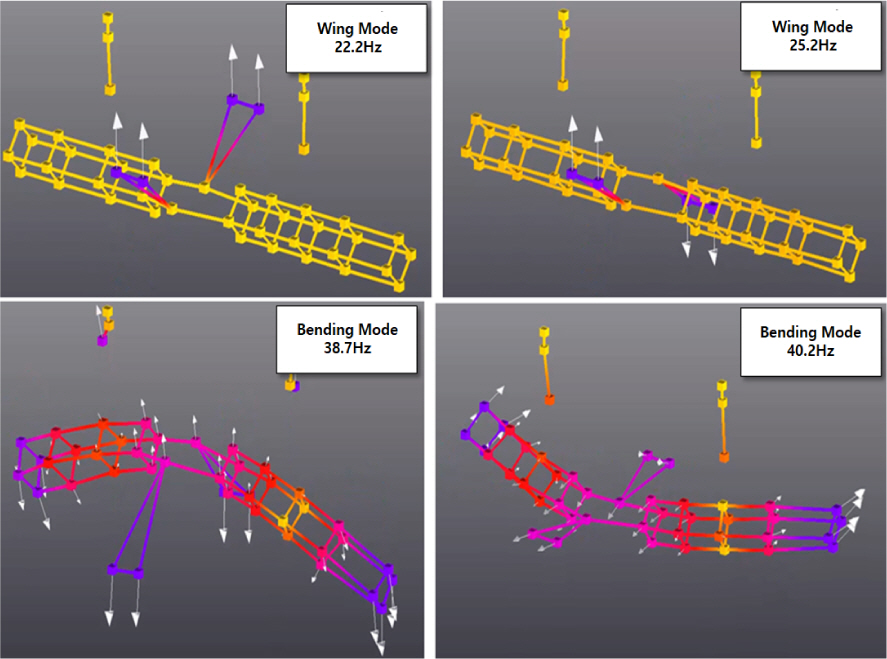
Results of modal test about vertical axis
4. 더미 시험체 비행진동 시험
사전 시험 및 해석을 통하여 시험 장치 및 더미 시험체에 대한 검토를 완료하고 비행진동 시험을 수행하였다. 이중 전동식 진동시험기와 더미 시험체는 스팅어를 이용하여 Fig. 13과 같은 방법으로 연결하였다.
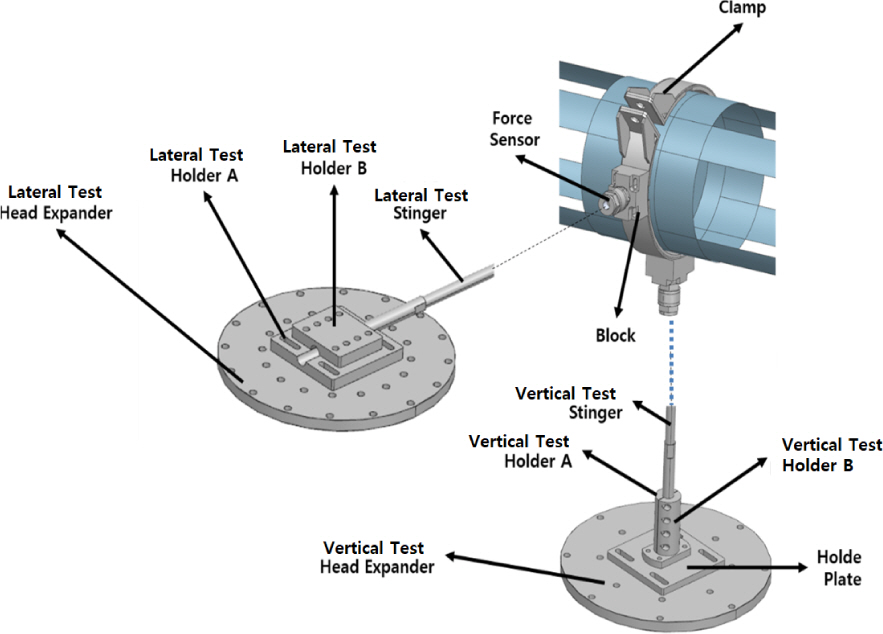
Stinger connection of lateral and vertical test
4.1 수평축 비행진동 시험
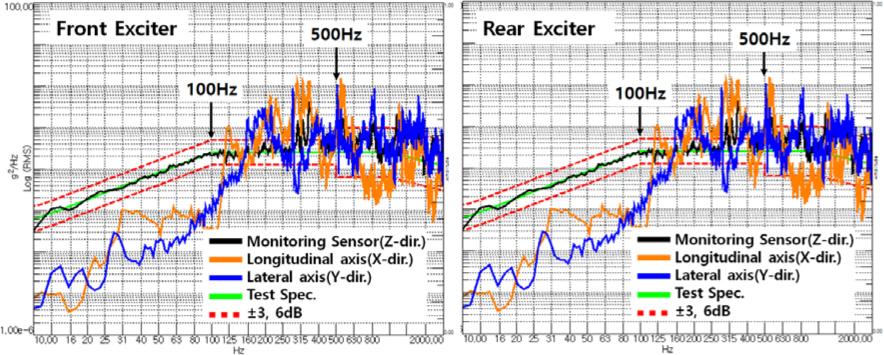
수평축 비행진동 시험은 3 dB를 시작으로 최대 수준으로 가진량을 상승시키는 절차로 1시간 이상 동안 정상적으로 수행되었다. Fig. 14는 더미 시험체 전방과 후방의 모니터링 센서에 계측한 가속도 PSD 응답으로 일부 고주파수에서 규격을 벗어나는 구간을 보이고는 있으나 비행진동 규격으로 진동시험기가 잘 제어됨을 확인할 수 있었다.
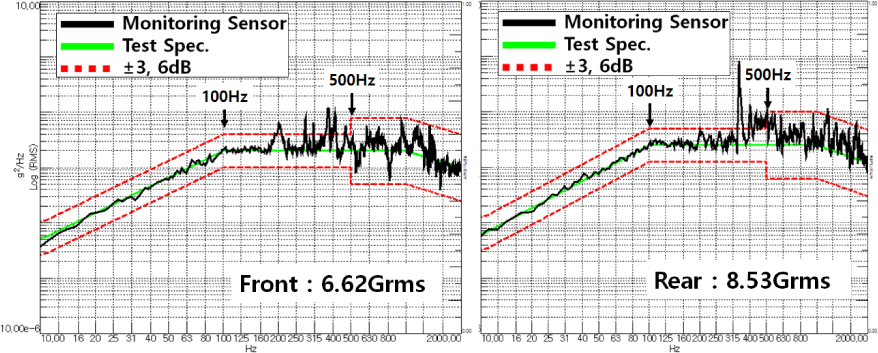
Response of monitoring sensors about lateral test
수평축 Off-Axis 응답 확인 결과는 식 (1)을 이용하여 확인하였다. 식 (1)에서 R1은 수평축, R2는 수직축 그리고 R3는 길이축에 대한 PSD 응답을 나타내고 A는 비행진동 규격의 PSD 응답을 나타낸다. 측정 결과를 Fig. 15에 나타내었다. 10∼80 Hz 구간에서는 Off- Axis 조건을 만족하고 있으나 이후 주파수 범위에서는 조건을 만족하지 못해 비행진동 규격보다 과한 진동 세기가 더미 시험체에 부가되고 있으나 시험 수행에는 문제가 없음을 확인하였다.
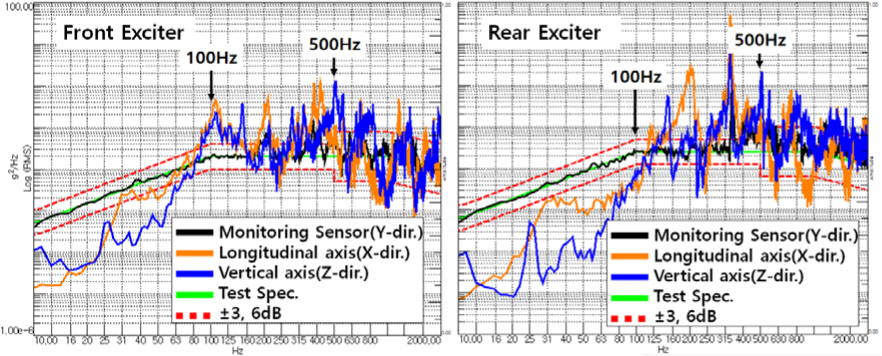
Off-Axis response about lateral test
Fig. 16은 전방 스팅어와 후방 스팅어에 장착한 포스(Force) 센서의 PSD 응답을 계측한 결과로 전방 가진기의 경우 12,460 Nrms, 후방 가진기의 경우는 9,145 Nrms의 횡방향 가진력이 계산되었다. 이는 해석 결과와 크게 다르지 않았으며 이중 전동식 진동시험기의 안전한 운용 범위 내임을 확인할 수 있었다[1].
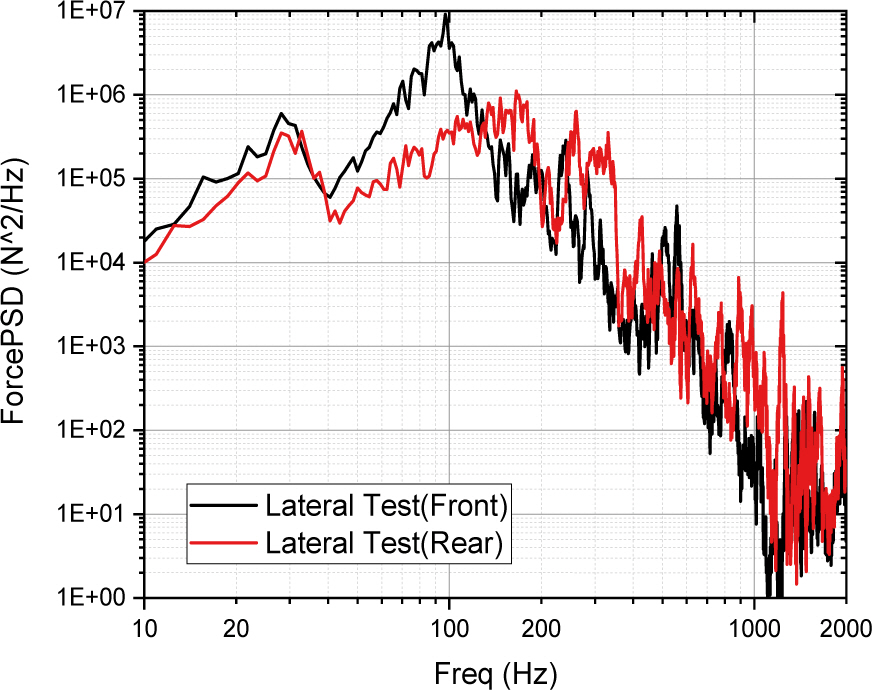
Front and rear exciting force PSD
수평축 시험 중 더미 시험체 몸체의 가속도 센서 계측 부위에서는 시험 규격 이상의 진동 신호가 계측되지는 않았다. 다만 시험 중 큰 변위를 보인 날개 끝단에서 시험 규격보다 더 큰 가속도 응답이 계측되었다. 이로부터 실제 무인 비행체의 주익 장착 부위에서도 유사한 취약성이 나타날 것으로 예측된다.
4.2 수직축 비행진동 시험
4.2 수직축 비행진동 시험 수직축 비행진동 시험도 수평축과 동일한 절차로 수행하였다. 3 dB를 시작으로 최대 수준으로 가진량을 상승시키는 절차로 1시간 이상 동안 정상적으로 수행되었다. 아래 Fig. 17은 더미 시험체 전방과 후방의 모니터링 센서에 계측한 PSD 응답으로 수평축 비행진동 시험과 유사하게 일부 고주파수에서 규격을 벗어나는 구간을 보이고는 있으나 비행진동 규격으로 진동시험기가 잘 제어됨을 확인할 수 있었다. 수직축 Off-Axis 응답 확인 결과를 Fig. 18에 나타내었고 수평축과 유사한 특성을 보였다.
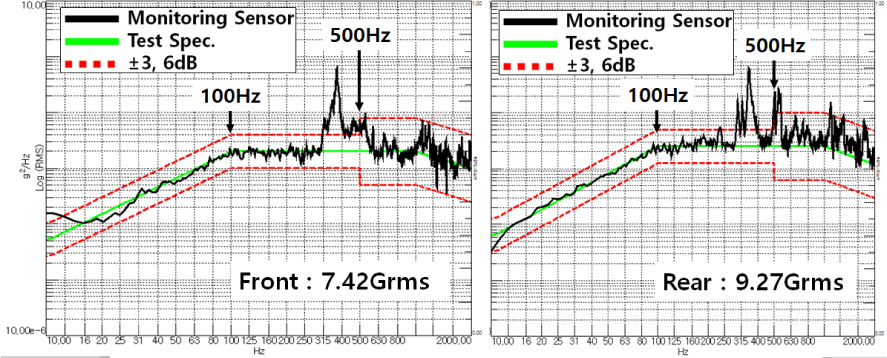
Response of monitoring sensors about vertical test
Off-Axis response about vertical test
Fig. 19는 전방 스팅어와 후방 스팅어에 장착한 Force 센서의 PSD 응답을 계측한 결과이다. 전방 가진기의 가진력은 13,233 Nrms로 후방 가진기의 가진력은 12,961 Nrms로 계산되었고 이는 가진기의 안전한 운용범위 내임을 확인할 수 있었다.

Front and rear exciting force PSD
수직축 시험에 대한 더미 시험체 주요 부위에 대한 가속도 응답의 경우도 수평축 시험과 유사한 측정 내용을 보였다. 본 시험 결과는 향후 실제 무인 비행체에 대한 진동 시험을 수행하는데 주요 관심 부위로 검토될 예정이다.
5. 비행진동 시험 후 추가 검토
5.1 클램프 결합력 검토
더미 시험체에 조립되어 가진기의 스팅어와의 연결 장비인 클램프의 결합력은 가진기의 제어 특성에 큰 영향을 준다. 더미 시험체에 완전하게 고정되면 제어 특성이 좋아질 수 있으나 반대로 시험체에 변형을 줄 수 있기 때문에 최적의 결합력을 찾을 필요가 있다.
본 연구에서는 진동 시험 중에 나타난 비교적 큰 가진력을 줄이기 위한 방안으로 가진기 제어 성능을 향상시킬 수 있는 관련 시험을 하였다. 클램프 토크 조절 나사의 인가 토크를 3가지 경우, 즉 125, 170 그리고 200 Nm에 대한 진동 시험을 수행하여 가진기의 제어 성능 향상 여부를 검토 하였다.
Fig. 20은 각 경우에 대한 가진기 출력단의 하중 계측 결과를 비교한 것으로 동일한 가진기 출력에 대해 클램프의 결합력이 클수록 가진력이 커짐을 확인하였다. Fig. 21에 보인 바와 같이 가진기 제어 성능도 체결 토크가 커짐에 따라 향상됨을 확인할 수 있다. Fig. 22는 클램프와 인접한 더미 시험체의 근접 위치에 대한 동특성 시험결과로부터 주파수 응답 함수를 획득하여 비교한 결과로 결합 토크가 커질수록 주파수 응답 함수 간의 차이가 줄어들고 있음을 확인하였다. 따라서 클램프와 더미 시험체는 접촉면이 넓을수록 제어 성능이 향상됨을 알 수 있었다.

Comparison of shaker excitation force by clamping torques
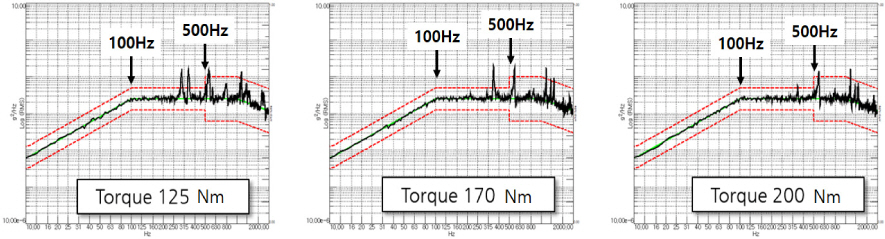
Comparison of shaker control performance by clamping torques
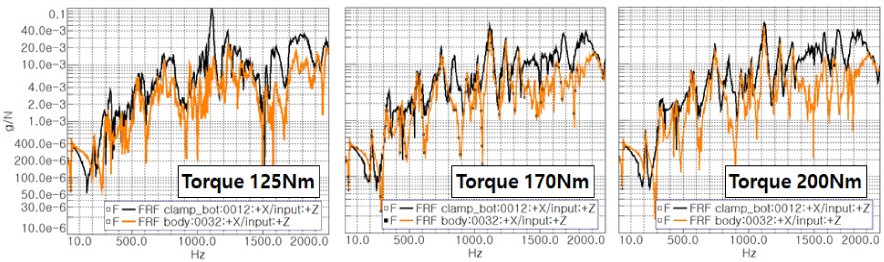
Comparison of frequency response function by clamping torques
본 시험으로부터 클램프 결합 토크는 125 Nm에서 170 Nm로 변할 때 일부 주파수 구간에서 제어 경향 및 가진력이 향상되는 방향으로 변화되고 있으나 170 Nm에서 200 Nm로 변경 시에는 유의미한 변화가 없었다.
클램프에 인가되는 토크 값이 커짐에 따라 가진기의 제어 성능 개선됨을 확인하였고, 특히 클램프와 더미 시험체가 접촉되지 않는 토크 인가 볼트 부위의 주파수 응답 함수의 차이가 상대적으로 매우 크게 나타났다. 결합 토크 값이 170 Nm로 변경될 때 주파수 응답 함수 차이가 심하던 정도가 상당 부분 개선되고 있음을 확인하여 최종적으로 결합 토크를 170 Nm로 결정하였다.
5.2 스팅어 연결 전 후 동특성 변화
가진기의 스팅어를 더미 시험체에 연결함에 따른 동특성 변화 정도를 확인하기 위하여 충격 해머를 이용한 더미 시험체에 대한 동특성 시험을 하였다. 수평축 시험 구성에 대하여 밴딩 모드는 스팅어 장착 전후로 0.9 Hz 정도, 수직축 시험 구성에 대해서는 스팅어 장착 전후로 0.4 Hz 정도 상승됨을 확인하였다. 따라서 스팅어의 체결로 인한 시험 구성의 동특성 변화는 미미함을 확인할 수 있었다.
6. 해석 모델 업데이트
본 연구에서는 동특성 시험 결과를 이용하여 해석 모델을 업데이트하고 비행진동 시험 결과와 비교 검토하였다. 해석 모델을 업데이트하기 위해 지멘스사의 Simcenter3D S/W를 이용하였다. 테스트랩을 이용하여 수행된 동특성 시험 결과와 Simcenter3D의 Nastran을 이용한 유한 요소 해석 결과를 상호 결합(Correlation)하여 해석 모델을 향상시킬 수 있었다.[6] 자유단 경계조건을 고려하여 스프링 조립체 이후를 시험 데이터를 이용한 업데이트용 유한 요소 모델로 구성하였다. 테스트랩에서 동특성 시험 시 구성한 시험 형상을 유한 요소 모델에 맵핑하여 Fig. 23과 같은 통합 모델을 구성하였다.
Mapping FEM model with test model
통합 모델의 해석 및 시험 결과를 상관(Correlation)시켜 MAC(Modal Assurance Criteria) 값을 계산하였다. 특정된 4개 고유 진동수에 대한 MAC의 평균값이 0.934로 계산되어 해석과 시험 결과가 잘 상관되어 있음을 확인하였다. Fig. 24는 보정된 해석 모델과 시험 모델의 모드 형상을 비교한 것이다.
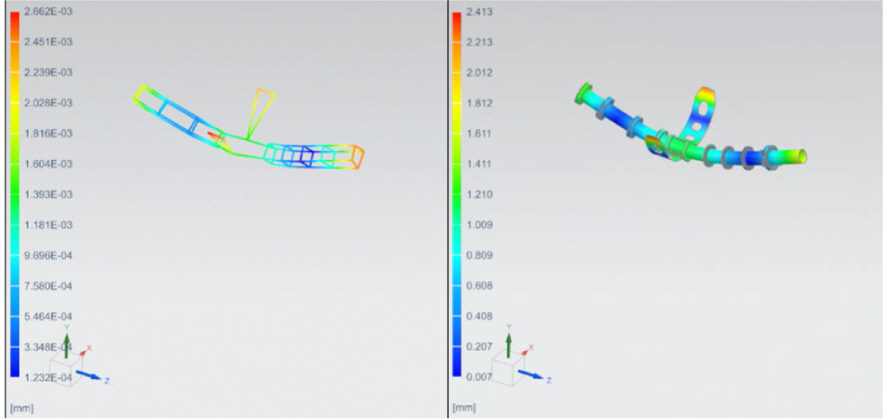
Comparison of modal properties with test (left) and correlated analysis model(right)
동특성 시험으로 획득한 주파수 응답 함수를 보정된 해석 모델에서 계산한 주파수 응답 함수와 비교한 결과를 Fig. 25에 나타내었다. 고유 진동수가 보정된 100 Hz 까지는 주파수 응답 함수가 잘 일치하고 있음을 확인하였다. 이는 본 연구에서 획득된 시험 모델의 동특성 시험 결과가 100 Hz까지이기 때문이다. 향후 연구에서 비행 진동 규격 범위인 2000 Hz까지의 동특성 시험 결과를 획득하여 통합 모델의 구성을 검토할 예정이다.

Comparison of frequency response function with test and analysis results
시험 모델로부터 업데이트된 해석 모델을 이용하여 비행진동 규격을 입력으로 한 랜덤 진동 해석을 수행하였다. Fig. 26과 같이 더미 시험체를 이용한 비행진동 시험에서 측정한 PSD와 어느 정도 유사한 해석 결과를 얻을 수 있었다. 이러한 결과를 기반으로 비행진동 시험에서는 센서를 장착해야 획득할 수 있는 시험 데이터를 해석 모델을 통하여 임의의 관심 위치에 대해서도 획득할 수 있음을 확인하였다. 이로부터 무인 비행체 내부에 탑재되는 장비에 대한 응답을 사전에 예측하여 탑재 장비의 비행진동 규격을 개선하는데 기여할 수 있을 것으로 판단된다.
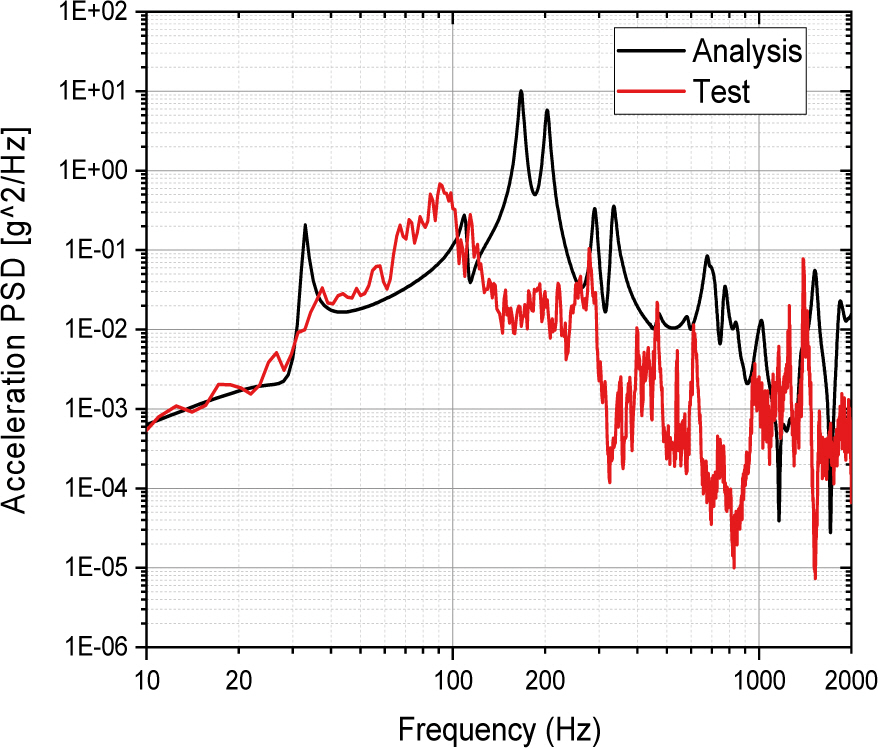
Comparison of frequency response function with test and analysis results
7. 결론
본 연구를 통하여 무인 비행체와 유사한 더미 시험체를 설계 및 제작하여 조립체 수준의 비행진동 규격을 적용한 진동 시험을 수행하였다. 더미 시험체를 적용한 비행진동 시험은 시험체의 형상을 고려하여 이중 전동식 진동시험기를 이용하여 2개 위치를 동시에 가진하는 MIMO 제어 방식으로 수행되었다. 대형 고중량 시험체에 대한 진동 시험은 그 제어가 매우 어렵지만 다양한 변수에 대한 사전 시험을 검토함으로써 성공할 수 있었다. 본 연구에서 수행한 더미 시험체 비행진동 시험을 통하여 실제 무인 비행체에 대한 비행진동 환경시험의 수행 가능성을 확인할 수 있었 다. 이는 무인 비행체의 운용 신뢰도 향상에 기여할 수 있을 것으로 판단한다. 또한 시험 모델을 이용하여 해석 모델을 업데이트하였고 이로부터 시험 모델에서 획득할 수 없는 다양한 위치에서의 응답을 획득할 수 있는 가능성을 확인하였다. 본 연구로부터 무인 비행체에 탑재되어 다양한 임무를 수행하는 전자 장비의 생존성을 향상할 수 있는 비행 환경 규격 현실화에 적용할 수 있을 것으로 판단된다.