유연성을 가지는 비행체를 위한 속도/방위각 정합 전달 정렬 알고리즘 설계
Design of Transfer Alignment Algorithm with Velocity and Azimuth Matching for the Aircraft Having Wing Flexibility
Article information
Trans Abstract
A transfer alignment is used to initialize, align, and calibrate a SINS(Slave INS) using a MINS(Master INS) in motion. This paper presents an airborne transfer alignment with velocity and azimuth matching to estimate inertial sensor biases under the wing flexure influence. This study also considers the lever arm, time delay and relative orientation between MINS and SINS. The traditional transfer alignment only uses velocity matching. In contrast, this paper utilizes the azimuth matching to prevent divergence of the azimuth when the aircraft is stationary or quasi-stationary since the azimuth is less affected by the wing flexibility. The performance of the proposed Kalman filter is analyzed using two factors; one is the estimation performance of gyroscope and accelerometer bias and the other is comparing aircraft dynamics and attitude covariance. The performance of the proposed filter is verified using a long term flight test. The test results show that the proposed scheme can be effectively applied to various platforms that require airborne transfer alignment.
1. 서 론
전달 정렬은 플랫폼(항공기, 선박 등) 운용 중에 플랫폼에 장착된 관성항법장치(이하 INS)를 초기화하고, 자세를 정렬하며, 관성 센서 오차를 교정하는 데 이용 된다. 비행 중 정렬로 알려진 공중 전달 정렬은 항공기 본체의 항법장치(이하 MINS)를 이용하여 항공기 날개에 전달 정렬이 요구되는 관성항법장치(이하 SINS)를 장착한 발사체가 있는 구조이다. 이러한 형태의 시스템은 기본적으로 레버 암(Lever arm)과 상대 자세(Relative orientation)에 의한 영향을 고려하여 두 시스템 간의 정보를 교환하여야 한다. 또한 항공기가 움직일 때 날개 유연성(Flexibility)에 의한 휨 현상이 발생한다.
일반적인 전달 정렬 시스템에서 항공기의 MINS는 정밀한 관성항법/위성항법 결합시스템(이하, INS/GNS S)이 사용되고 SINS는 INS의 성능이 MINS에 비하여 낮은 INS/GNSS가 이용되는 경우가 많다.
전달 정렬은 주로 칼만 필터가 이용되는데 MINS와 SINS의 항법 해를 비교하여 측정치로 이용한다. 시스템에 따라 요구되는 전달 정렬 정확도 및 전달 정렬에 소모할 수 있는 시간이 다르므로 이를 고려하여 측정치 정합(matching)의 형태를 선정해야 한다. 가장 기본적인 측정치 정합은 속도 정합이며[1-5], 급속 전달 정렬이 필요한 경우 자세 정합이 이루어진다[1-4,6,7]. 일반적인 전달 정렬은 속도 정합을 사용한다. 하지만 속도의 순시치를 사용하는 경우 측정치 잡음이 상대적으로 크기 때문에 전달 정렬 성능이 열화될 수 있다. 일반적으로 빠른 전달 정렬 수행 및 전달 정렬 성능 확보를 위해 칼만 필터 갱신 주기 동안의 평균 속도를 사용한다[1,27,28]. 평균 속도를 사용함으로써 진동 잡음을 제거하고 측정치 갱신 주기에 동기가 맞지 않은 상태 변수 추정 문제를 줄일 수 있다.
속도 정합의 경우 방위각(Heading) 오차가 수평 자세인 롤(Roll), 피치(Pitch) 오차보다 크다. 방위각 오차의 추정 성능의 향상을 위해서는 회전을 포함한 운동을 하여야 하는데 이러한 운동을 하지 못하면 정렬 성능이 크게 저하된다[1,2,6,7]. 따라서 방위각 오차 추정 성능은 회전 운동이 없는 운동의 마지막과 전달 정렬 완료 시점 사이에서 저하된다. 이러한 문제의 해결을 위하여 MINS의 자세 정보를 이용할 수 있다[1,2,5].
자세 정합은 전달 정렬을 위한 운동 조건을 완화시켜 방위각 오차의 계속되는 성능저하를 막을 수 있다. 그러나 자세 정합을 이용하는 경우 관성센서 오차 교정을 위해서 더 많은 시간이 필요하다[1,2]. 또한 날개 휨 현상에 대한 영향을 크게 받게 되고, 기동에 따라서 오차 추정 성능이 다르게 나타난다[1,2,7]. 이를 위하여 칼만 필터에 날개 휨을 위한 상태 변수를 모델링 할 수 있다[8,9]. 날개 유연성을 다양한 방법으로 모델링 하는 연구들이 진행됐지만[10-15] 다양한 요인에 따라 불규칙하게 변하는 날개의 유연성을 정확하게 모델링 하는 것에는 한계가 있다. 최근 딥러닝 기술을 활용하여 날개 유연성 모델링을 생성하는 연구 및 날개 유연성을 학습하여 전달정렬에 적용하는 연구들이 진행되고 있으나[14,16-19], 이를 위해서는 다량의 데이터 확보가 필수적이기 때문에 현실적인 무기체계 운용 면에선 적용하기 힘들 것으로 보인다.
날개 유연성에 대한 모델링이 없는 경우, 롤 운동 동안 상대적인 롤 자세가 크게 영향을 받는다. 이는 항공기가 일반적으로 기동을 위해서 롤 운동이 필요하기 때문이다. 이러한 문제의 해결을 위하여 상대적인 자세 변화를 유발하는 날개 유연성을 칼만 필터에 모델링 하는 연구들이 진행되어 왔으나[8,9], 복잡한 모델링 기법이 요구되고[1,20] 칼만 필터 차수를 증가시켜 효율이 저하 되는 문제가 있다.
본 논문은 날개 유연성을 가지는 항공기를 위한 속도/방위각 정합 전달 정렬 알고리즘을 설계한다. 알고리즘은 MINS와 SINS 사이의 레버 암과 시간지연, 상대 자세를 고려하였다. 날개 유연성 오차를 보상하기 위해 일반적인 속도 정합에서 방위각 정합을 포함하여 전달 정렬 필터를 설계하였다. 방위각 정합을 포함함으로써 항공기가 정지 상태 혹은 준 정지 상태에 있을 때 방위각의 발산을 막을 수 있다. 날개 휨에 의해 변화하는 상대 자세를 직접 칼만 필터에 추가함으로써 날개 유연성 오차 모델의 추가에 따른 칼만필터의 차수 증가 및 복잡성을 제거하였다. 레버 암은 일반적인 방법으로 보상하였으며[6,21], 시간지연은 GPS로부터 송신되는 1PPS와 GPS 시간을 이용하여 추정하였다[22]. 제시된 전달 정렬 알고리즘의 성능은 실제 비행시험을 통해 증명하였다. 또한 제시된 알고리즘을 통해 다양한 플랫폼에 실제 공중 전달 정렬이 효과적으로 적용될 수 있음을 보였으며, SINS 순수항법 성능 분석을 위하여 자이로와 가속도계 추정 바이어스 및 비행체 기동에 따른 정렬 정밀도를 평가하였다.
2. 속도/방위각 정합 전달 정렬 알고리즘 설계
전달 정렬은 일반적으로 SINS 오차 모델(시스템 모델)과 MINS와 SINS 항법 정보를 비교하여 생성되는 정보(측정치 모델)를 이용하여 칼만 필터로 구현된다. 따라서 전달 정렬 칼만 필터를 구현하고자 하는 대상에 적절한 시스템 모델과 측정치 모델을 선정하여야 하고 더 나아가 그들의 통계적인 특성을 알고 있어야 한다.
2.1 시스템 모델
속도/방위각 정합 전달 정렬을 위한 시스템 오차 모델(SINS 오차모델)은 다음과 같이 구성될 수 있다[1,4,21,23].
여기서, 첨자 i,e,n,b 는 각각 관성 좌표계, 지구 좌표계, 항법 좌표계, 동체 좌표계를 의미한다. 자세 오차(
여기서, ×는 왜대칭(skew-symmetric) 행렬을 의미하며 다음과 같이 정의된다.
속도 오차(
SINS 자이로 오차(
식 (7)의 가속도계 오차는 중력 오차(
시스템 모델 (1)의 나머지 항들은 다음과 같다.
여기서, Ω는 지구 회전 각속도이며,
식 (10)은 다음과 같이 이산화된 상태 공간 모델로, 시변 선형 시스템이다.
여기서,
2.2 측정치 모델
속도/방위각 정합 전달 정렬을 위한 측정치는 속도 오차와 방위각 오차이므로 MINS와 SINS의 속도와 방위각의 차이에 의하여 결정된다. 그런데 이미 언급하였듯이 측정치를 구성하기 위하여 고려해야 할 사항이 있다. 이들은 시각 지연(time delay)과 레버 암에 의하여 발생하는 속도, 유연성(flexibility)에 의한 상대적인 자세의 차이이다[6,24-26].
MINS가 단지 INS만을 이용하는 시스템이라면 절대시간을 정할 수 없다. 그러나 INS/GPS를 이용하는 시스템인 경우 GPS를 이용하여 절대시간 정보를 얻을 수 있다. SINS 역시 GPS와 같은 위성 항법 시스템을 이용한다면 절대시간을 정할 수 있으므로 MINS가 정보를 전달할 때의 시간 정보를 같이 준다면 시각 지연의 문제는 쉽게 해결할 수 있다. 그런데 SINS가 전달 정렬을 끝내기 전까지는 GPS를 이용할 수 없는 상황이라면 측정치 동기를 위해 SINS의 기준 시각을 결정해야 한다. 본 연구에서는 기준 시각 결정을 MINS로부터 수신하는 1PPS와 항법 정보의 시간을 이용한다. 지연 오차로 인해 SINS가 MINS로부터 수신한 항법 정보는 과거 시점의 정보이다. SINS은 MINS로부터 1PPS를 수신하는 시점부터 다음 1PPS를 수신한 시점까지 받은 시간 정보를 확인하여 1PPS 시각을 결정한다. 이렇게 결정된 기준 시각은 1PPS를 수신 시 마다 1초 단위로 증가하게 된다. 이를 기준으로 SINS는 1 ms 단위로 시간을 증가시켜 항법 계산에 사용하는 관성 데이터 생성 시점에 대한 msec 수준의 시간 정보를 계산한다. 이러한 과정을 통해 MINS처럼 SINS 도 1PPS를 기준으로 데이터 생성 시마다 항법 정보의 시간을 1 ms 단위로 계산할 수 있다. Fig. 1은 항법 정보 생성 및 시각 기준을 설명하는 그림이다.

Navigation data generation and data generation timing
SINS은 관성 데이터와 시간 정보를 400개의 배열을 사용한 링 버퍼 형태로 저장한다. Fig. 1에서 알 수 있듯이 지연 오차로 인해 SINS가 항법 정보를 수신한 시점에서 MINS의 시간 정보는 SINS에서 생성된 관성 데이터 시간보다 이전의 시간을 가진다. 이러한 시간 지연 때문에 SINS는 Fig. 2와 같이 측정치 동기화를 위한 작업을 진행한다. SINS가 MINS로부터 항법 정보를 수신하면 마지막으로 저장된 배열에서 역순으로 올라가 SINS와 MINS의 데이터를 비교한다. 저장된 SINS 시간과 수신된 MINS의 시간을 비교하여 시각 차이가 가장 작은 배열을 찾으면, 그 SINS의 배열 정보가 MINS 항법 정보와 동기된 정보가 된다[22].

Measurement synchronization
시각 지연은 일반적으로 측정할 장비가 없는 경우는 칼만 필터의 상태 변수에 시각 지연을 포함시켜 추정한다[24,25]. 그러나 크기가 시스템에 의존하며 매번 일정하지 않아 현실적으로 그 값을 정확하게 추정하기가 쉽지 않다. 따라서 외부 장비를 이용한 제시된 방법이 효율적이다.
레버 암에 의한 속도 차이는 MINS와 SINS가 상대적인 거리를 두고 있으므로 MINS에서 측정된 속도와 SINS에서 측정된 속도는 지렛대 속도만큼 차이가 발생한다. 따라서 MINS와 SINS 사이의 거리 벡터
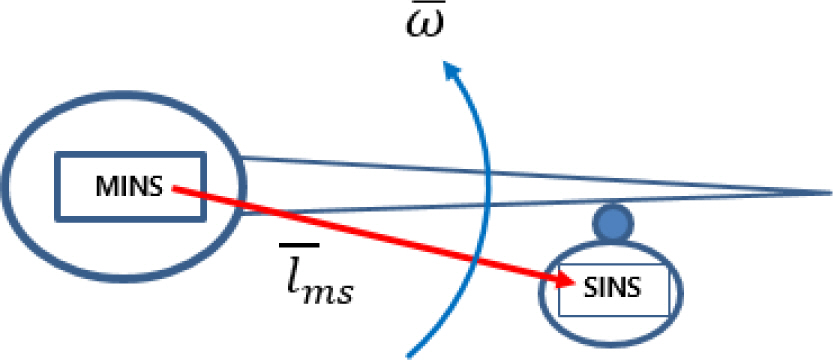
Lever arm effect
레버 암에 의한 속도(
여기서
식 (11)과 (12)에 의하여 레버 암 속도 보상 오차는 다음과 같다.
식 (13)에서 오차항들의 곱은 무시하였다.
자세 정합은 일반적으로 빠른 전달 정렬과 기동 조건의 완화를 위하여 사용한다. 즉, 속도 정합은 자세의 추정에 시간이 오래 걸리고, 항공기 기동이 없거나 정속 주행을 할 때 자세의 추정에 문제가 발생한다. 특히 방위각의 추정이 어렵다. 그런데 자세 정합은 유연성 및 기타 원인에 의하여 Fig. 4와 같이 상대적인 자세 변화가 생기면 자세 오차의 추정치를 크게 편향시킬 수 있다.
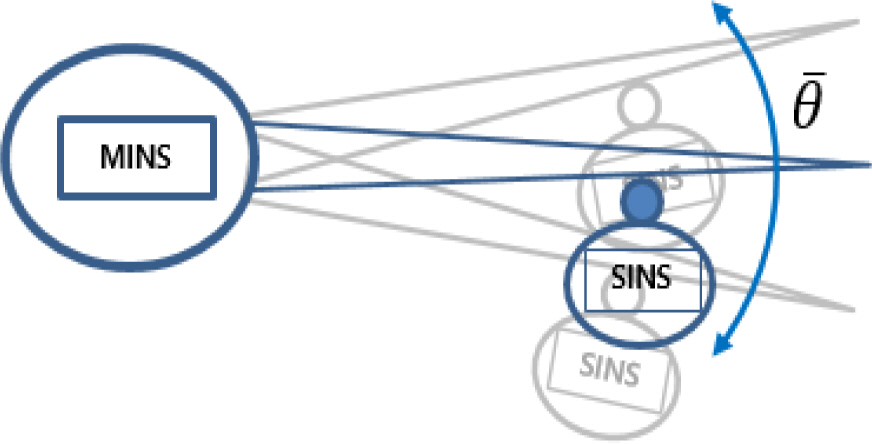
Relative orientation
이러한 문제의 해결을 위하여 상대적인 자세 변화를 유발하는 요소를 칼만 필터에 모델링 하여 추가할 수 있다. 하지만 이러한 경우 날개 유연성 상수가 필요하게 되는 등 앞서 언급한바와 같이 날개 모델링 상수 및 상태 변수 추정을 위한 매우 복잡한 모델링 기법이 요구되고 칼만 필터 차수를 증가시켜 효율이 저하 된다. 본 연구에서는 유연성에 의한 상대 자세 변화에 대한 영향이 최소화되도록 방위각 정합을 이용함으로써 정지 상태나 정속 상태에서의 속도 정합의 문제점을 해결하고, 식 (1)에서 알 수 있듯이 상대 자세(
자세 정합 방법은 오일러 각 정합과 쿼터니언 정합, DCM(Direction Cosine Matrix) 정합 등 다양한 형태로 설계될 수 있으나, 본 연구에서는 오일러 각의 요(yaw)에 해당하는 방위각 정합을 이용하므로 오일러 각 정합 방식을 통하여 방위각 부분을 추출하였다.
오일러 각 정합은 SINS와 MINS의 오일러 각의 차이를 이용한다.
여기서,
여기서,
식 (16)을 다시 오일러 각 오차에 대하여 정리하면 다음과 같다.
상대 자세(
식 (18)을 다시 정리하면 다음과 같다.
식 (19)를 다시 오일러 각 오차에 대하여 정리하면 다음과 같다.
식 (14)의 SINS와 MINS의 방위각 차이를 (17)과 (20)으로부터 칼만 필터 자세 오차로 나타내면 다음과 같이 된다.
결국 측정치는 다음과 같다.
여기서, 행렬 H(k)εR4×15는 식 (22)에 의하여 구성되며 v(k)εR4는 측정 잡음이다.
결국, 식 (10)과 (23)의 시스템 모델과 측정치에 의하여 다음과 같은 칼만 필터를 구현할 수 있다[3,4,22].
여기서,
식 (24)에서 P(k)는 대각선 성분은 오차 상태 변수의 자기 공분산으로 다음과 같이 주어진다.
여기서,
Pε = diag [Pεn Pεe Pεd]: 자세 오차 공분산
Pδv = diag [Pδvn Pδve Pδvd]: 속도 오차 공분산
Pβ = diag [Pβx Pβy Pβz]: 자이로 바이어스 공분산
Pα = diag [Pαx Pαy Pαz]: 가속도계 바이어스 공분산
Pη = diag [Pηx Pηy Pηz]: 상대 자세 오차 공분산
전달 정렬의 궁극적인 목표는 SINS의 자세를 구하는 것이므로 자세 추정 오차의 공분산을 이용하여 전달 정렬의 정밀도를 예측할 수 있다. 본 연구에서는 식 (27)을 이용하여 정렬 정밀도(Alignment Quality)를 파악한다.
설계된 속도/방위각 정합 전달 정렬 칼만 필터의 구조를 Fig. 5에 도시하였다. SINS는 200 Hz로 동작하며, 측정치는 MINS로부터 25 Hz로 제공된다. 그리고 전달 정렬 칼만필터는 1초 단위로 갱신되도록 설계하여 SINS와 MINS 정보는 1초 평균을 구하여 칼만필터에 적용하였다. 텔레메트리로 획득되는 데이터 주기는 각각 SINS의 센서 데이터는 200 Hz, 항법 데이터는 50 Hz, GPS는 1 Hz이며. MINS는 1 Hz이다.
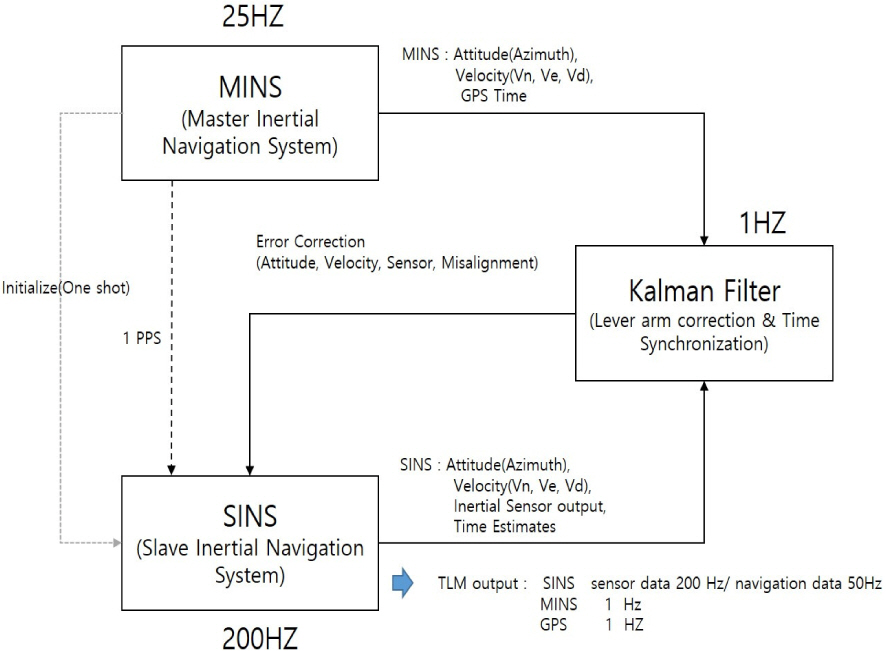
Transfer alignment using kalman filter with velocity and azimuth matching
3. 시험 및 결과분석
제시된 속도/방위각 정합 칼만 필터는 MINS를 장착한 항공기 날개에 SINS를 장착하여 시험하였다. SINS의 INS는 MINS에 비하여 저급 항법장치를 사용하였다. MINS와 SINS 모두 INS/GPS를 이용할 수 있으나 전달 정렬 중에는 SINS는 GPS 정보를 이용하지 않는다. 이때 MINS의 경우 INS/GPS를 한 상태에서 항법 정보를 넘겨주기 때문에 전달 정렬 칼만 필터 설계 시 이를 고려하여 공분산을 설정하여야 한다.
본 논문에서 사용하는 전달 정렬 칼만 필터를 위한 초기 공분산(P(0))과 시스템 잡음 공분산(Q), 측정치 잡음 공분산(R)은 초기에 MINS가 원샷으로 제공하는 정보와 SINS의 관성 센서 성능을 고려하여 다음과 같이 선정하였다.
p(0) = diag[Pε Pδv Pβ Pα Pη]: 초기 공분산
Q = diag[Qε Qδv Qβ Qα Pη]: 시스템잡음 공분산
R = diag[Rδv Rδh]측정치 잡음 공분산
Fig. 6은 이동궤적과 관련된 수평(Fig. 6(a)), 수직 궤적(Fig. 6(b))을 도시하였다.
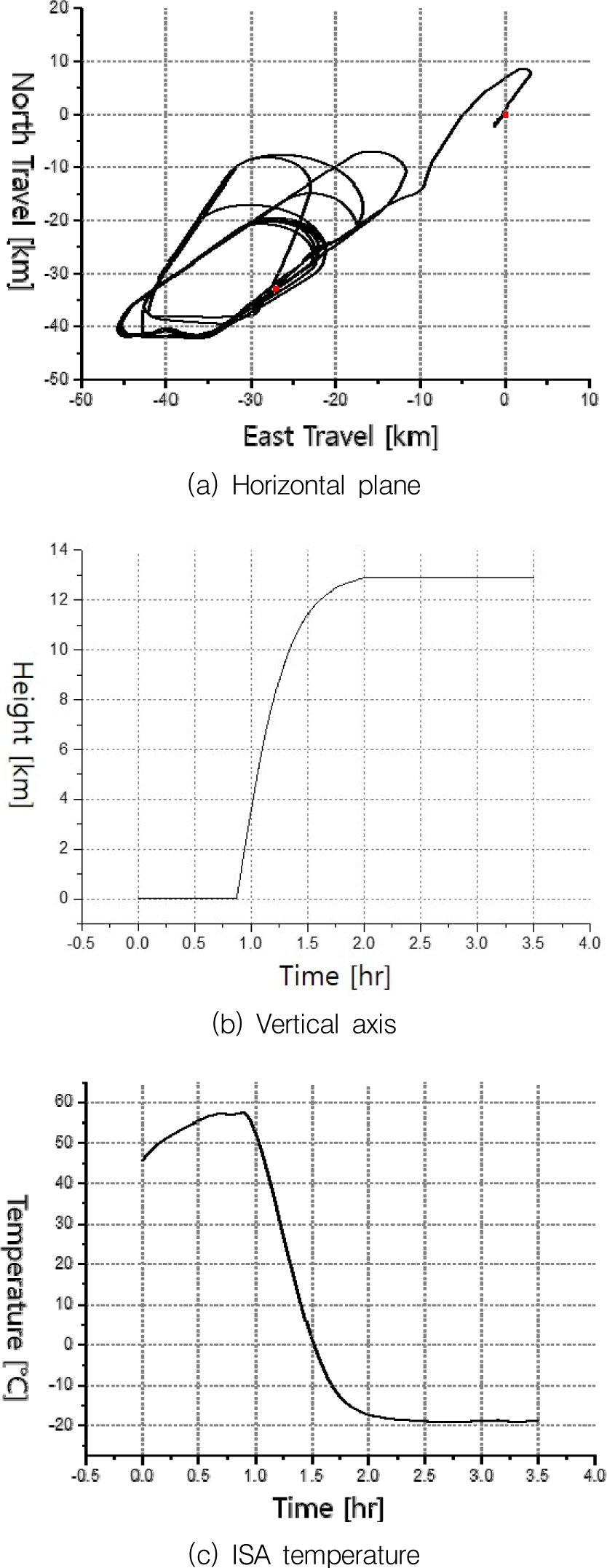
Trajectory and temperature for the test
초기에 약 1시간 지상에서 정지 및 이동한 후, 약 1시간 동안 직진 및 회전하며 상승하였다. 약 2시간에 걸쳐 일정한 고도에서 회전 및 직선 운동을 반복하였다. 그리고 Fig. 6(c)는 시험 동안의 SINS ISA(Inertial Sensor assembly)의 온도를 나타내고 있다. 초기에 지상에서 전자 부품의 발열에 의하여 온도가 상승하나, 고도가 상승 하면서 주변 온도가 하강하여 ISA 온도 역시 하강함을 볼 수 있다. 관성 센서의 자이로 특성은 온도와 밀접한 관계가 있으므로 센서 추정치를 분석하는데 있어 온도값은 중요한 변수이다.
Fig. 7(a)에는 아래(Vd)와 동쪽(Ve), 북쪽(Vn) 방향 속도의 변화를 도시하였다. 아래 방향 속도(Vd)는 상승할 때 발생하였다가 사라지는 것을 볼 수 있으며, 동쪽(Ve), 북쪽(Vn) 방향 속도는 회전과 직선 주행을 반복하므로 크기가 변화하는 것을 볼 수 있다.

Velocity and lever arm effect
Fig. 7(a)를 보면 지상에서 회전운동을 거의 하지 않았기 때문에 속도 변화가 적지만 고도가 상승한 후에서는 속도 변화가 크게 일어나는 것을 알 수 있다. Fig. 7(b)는 레버 암에 의하여 발생하는 MINS와 SINS 의 속도 차이를 나타내고 있다. Fig. 7(a)와 Fig. 7(b)를 비교한 결과 항공기의 속도 변화가 크게 있을 때 레버 암의 영향이 크게 나타남을 볼 수 있다. 또한 항체의 자세변화가 크게 있을 때도 레버암의 영향이 크게 나타나는 것을 알 수 있으며, 이는 Fig. 8(a)와 Fig. 7(b)에서 알 수 있다. 제시한 알고리즘에서 레버 암 보상을 위해 쓰이는 MINS와 SINS의 위치 차이는 x = 0.656 m, y = 2.96m, z = 1.015 m 이다.
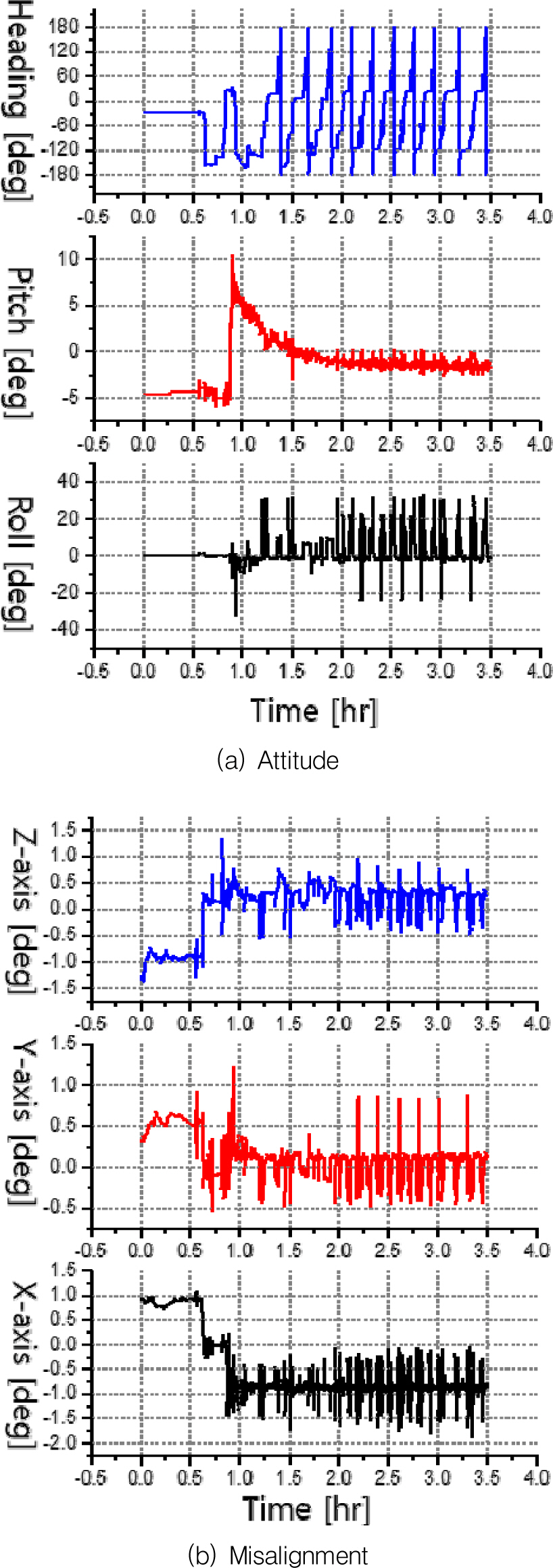
Attitude and misalignment
Fig. 8(a)는 방위각과 피치, 롤의 변화를 나타내고 있다. 자세의 경우 피치는 항공기가 상승할 때 나타나며, 회전할 때 방위각의 변화만 있어야 하나 항공기가 뱅크 턴(Bank Turn)을 함으로 회전시 마다 롤의 변화가 발생한다. Fig. 8(b)는 항공기의 기동에 의하여 나타나는 MINS와 SINS의 비정렬을 나타내고 있다. Fig. 7과 Fig. 8의 (a)에서 알 수 있듯이 항공기의 속도, 자세의 변화가 크게 있을 때 비정렬 및 레버암의 영향이 크게 나타남을 볼 수 있다. 이는 Fig. 7과 Fig. 8에서 나타난 운동이 SINS의 관성 센서의 오차를 추정하기에 충분한 운동임을 보여준다.
Fig. 9(a)는 가속도계 바이어스 추정치를 나타내고 있다. 가속도계 바이어스는 항공기가 초기에 지상에서 이동하는 동시에 수렴하였다. 그 후 고도 상승을 위한 피치 변화에 의하여 약간 변화를 가지나 방위각과 롤의 변화와는 관계없이 x, y, z축 각각 약 0.16, 0.03, 1.2 mg로 수렴하였다. 추정된 바이어스 1.2 mg는 보상이 안될 경우 관성 항법 위치 오차를 1분에 약 20 m 유발할 수 있는 센서 오차에 해당한다.

Accelerometer and gyro bias
Fig. 9(b)는 자이로 바이어스를 나타낸다. 자이로 바이어스는 약 2시간 기동 후에 수렴한다. 시험에서 1시간에 걸쳐 고도를 상승시킴으로써 자이로 바이어스 추정치가 온도의 변화에 따라 변화하는 것을 알 수 있었다. 즉 Fig. 6(c)에서 볼 수 있듯이 ISA 온도가 수렴한 후 자이로 바이어스 역시 수렴하는 것을 알 수 있다. 자이로 바이어스는 x, y, z축 각각 약 - 15, 3, 2 deg/hr로 수렴하였다. 바이어스 15 deg/hr는 관성 항법 위치 오차를 1분에 약 25 m 유발할 수 있는 센서 오차이다.
Fig. 8과 Fig. 9를 비교하면 관성 센서 바이어스는 수렴 후 방위각과 롤 변화에 따른 영향성이 줄어 들어 수렴성을 유지한 채로 적정한 수준 내의 변화를 보인다는 것을 알 수 있다. 뿐만 아니라 Fig. 7과 Fig. 9를 비교하였을 때, 속도 변화에 따른 레버암의 변화에도 영향을 받지 않고 수렴성을 유지하는 특성을 보인다. 이는 제안한 전달 정렬 알고리즘에서 레버암과 방위각 정합을 사용한 효과로 보여진다. 특히, 자이로 바이어스 추정치는 온도변화에 따른 자이로 오차 변화를 잘 반영하고 있다. Fig. 7 ∼ Fig. 9를 비교하였을 때, 유연성을 가지는 비행체에 대하여 제안된 속도/방위각 정합 전달 정렬 방식이 유효함을 알 수 있다.
Fig. 10에 식 (27)의 AQ(Alignment Quality, 정렬 정밀도)를 mil 단위(1 mil = 0.05625 deg)로 표시하여 나타내었다. 정밀도는 1.75 mil의 수준을 보이고 있으나 기동에 따라 변화하는 것을 볼 수 있다.
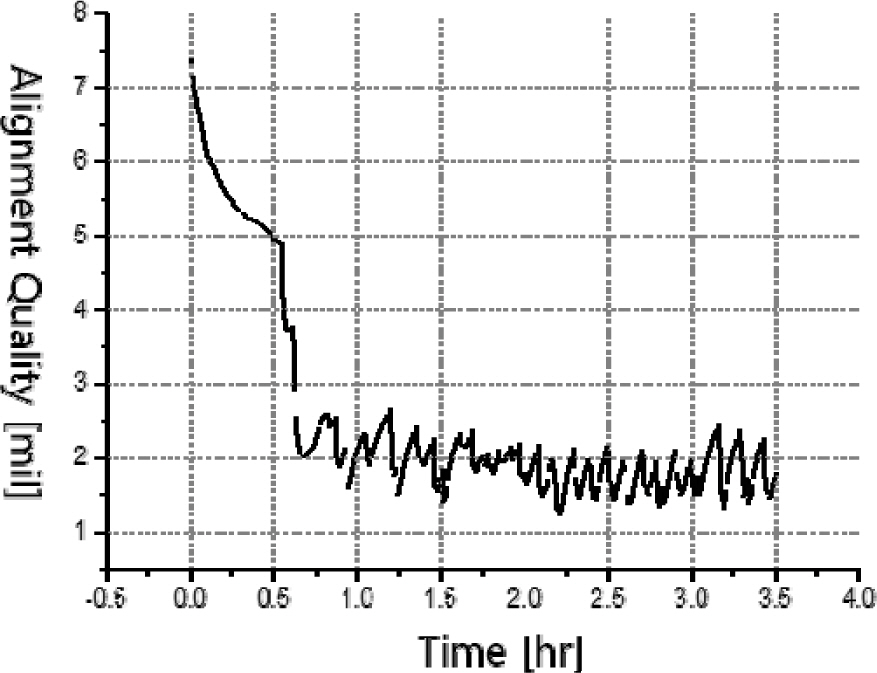
Alignment quality
회전 기동 구간과 직선기동 구간에서정렬 정밀도 변화를 분석하기 위해서 Fig. 11에 방위각 그래프와 AQ그래프를 겹쳐서 함께 도시하여 분석하였다. Fig. 10과 Fig. 11을 비교하여 분석하였을 때, 정렬 정밀도가 회전기동을 하는 구간에서는 향상되고, 직선기동을 하는 구간에서는 저하되고 있는 것을 알 수 있다. 방위각 변화 폭이 큰 부분(기동 상태), 즉 회전이 끝나는 시점에서 정밀도가 향상된 반면에 방위각 변화가 없는 직선구간(정속 상태)에서 정렬 정밀도가 떨어지는 것을 확인할 수 있다. 정렬 정밀도의 차이는 회전 기동 구간이 직선 기동 구간에 비해 크게는 1 mil 정도의 차이가 나고 있다.
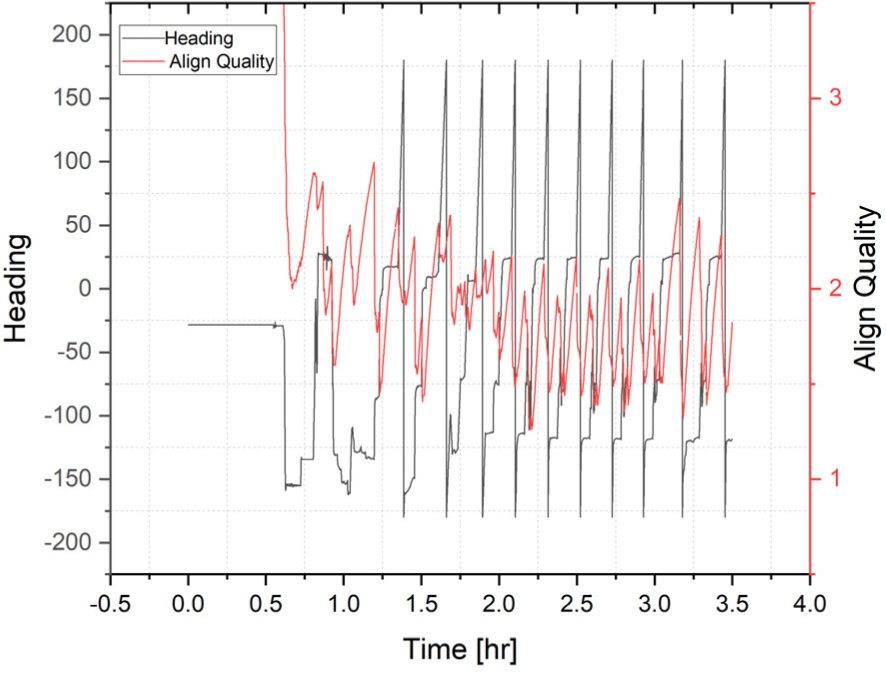
Alignment quality and heading analysis
이를 통해 회전과 유사한 기동을 장시간 수행하면 정밀도를 더욱 향상 킬 수 있다는 것을 알 수 있다. SINS는 스스로 정렬이 불가한 장비이므로 MINS를 통한 전달 정렬을 통하여 정렬 자세 오차를 1 mil에서 2 mil의 수준의 유지하기는 어렵지 않다. 1 mil 방위각 오차는 관성 항법 장치가 1 km 이동시 1 m의 오차를 유발하므로 전달 정렬 이후 SINS 단독 항법 성능을 높이기 위해서는 기동 직후에 운용하는 것이 유리하다.
4. 결 론
본 논문은 날개 유연성을 가지는 항공기를 위한 속도/방위각 정합 전달 정렬 알고리즘을 설계하여 실험을 통하여 그 성능을 파악하였다. 제안한 전달 정렬 알고리즘 성능 평가 기준은 SINS의 관성 센서(자이로, 가속도계) 오차 추정치를 통하여 파악하였다. 시험 결과로부터 알 수 있듯이 가속도계와 자이로 바이어스는 수렴 후 날개 유연성에 의한 방위각과 롤의 변화에 관계 없이 수렴하여 적정한 수준 내의 변화를 보인 것을 알 수 있으며, 레버 암에 의한 속도 변화에도 관계 없이 수렴성을 유지한 것을 알 수 있다. 이는 제안한 전달 정렬 방식에서 레버암에 의한 효과를 고려하고, 날개 유연성에 영향을 덜 받는 방위각 정합 방식을 채택한 효과로 보인다.
자이로 바이어스는 오차 추정치가 온도 변화에 따라 변화하지만 전달 정렬 수행 후 SINS가 단시간 동안 임무를 수행한다면 온도의 변화는 심하지 않을 것이므로 SINS가 전달 정렬에서 얻은 개선된 성능을 유지 한 채로 임무를 수행할 수 있다. 따라서 시험 결과로부터 제안한 알고리즘이 날개 유연성을 가지는 비행체에서 유효함을 알 수 있다.