



서 론
최근 무기체계는 네트워크중심전장(Network Centric Warfare)에서 지휘통제, 정보감시정찰 및 정밀타격체계 (C4ISR-PGM : Command Control Communication Computer Intelligence Surveillance Reconnaissance-Precision Guided Munition)들과 상호 연동하여 효과적인 통합작전 임무를 수행하기 위한 복합무기체계(System of Systems) 개념으로 운용되고 있다. 특히 대공유도무기체계는 표적까지 비행하여 공중 표적을 폭파시키는 유도탄, 유도탄을 운반하고 발사하는 발사대(Launcher System), 교전통제 임무를 수행하는 교전통제시스템(Engagement Control System), 표적 정보를 획득하는 레이더(Radar) 등으로 구성된다. 교전통제시스템은 전술데이터링크를 통하여 조기경보체계 등으로부터 위협 및 전장상황 정보와 상부 지휘통제체계로부터 지휘통제명령과 교전상황 정보를 공유하며 다른 정밀타격체계와 협동교전 임무를 수행하고, 체계 내부의 레이더, 발사대 및 유도탄을 통제하여 효과적인 교전통제 임무를 수행하는 시스템이다.
무기체계의 개발과 시험평가를 위하여 실제 전장환경과 동일한 시험환경을 제공하는 데는 시간, 공간, 안전, 비용 등으로 인한 많은 제약이 따르며, 이들을 해결하기 위하여 지난 수십 년 동안 M&S 기술을 광범위하게 활용하여 왔다[1]. M&S 분야에서는 1989년 국방 시뮬레이션 상호운용성 표준에 대한 워크숍을 시작으로 현재까지 분산 시뮬레이션(Distributed Simulation) 방식을 폭넓게 연구하고 활용하여 왔다[2]. 분산 시뮬레이션 분야에서는 높은 충실도 시뮬레이션을 위한 DIS (Distributed Interactive Simulation)[3], HLA(High Level Architecture)[4], 그리고 실제 시험평가 활동 지원을 위한 TENA(Test and Training Enabling Architecture)[5] 상호운용성 표준들을 제정하였고 활발히 사용하고 있다. 국외에서는 항공기/미사일방어 시스템의 개발과 시험을 위하여 프랑스 Thales는 DIS기반 SILS(Software In The Loop) 및 HILS(Hardware In The Loop) 시뮬레이션이 가능한 ITB(Integration Test Bed)[6], 독일 IABG도 HLA 기반 분산 시뮬레이션이 가능한 통합시험환경[7], 그리고 NATO에서도 DIS/HLA 기반의 분산테스트 베드[8]를 개발하여 사용하고 있다. 국내에서도 2006년부터 대공유도무기체계의 교전통제시스템을 개발하기 위하여 실 장비의 하드웨어/소프트웨어 통합시험과 체계 수준의 시험환경으로 HLA 기반의 분산 시뮬레이션이 가능한 통합시험시스템을 개발하여 사용하고 있다. 최근에는 응용 소프트웨어를 컴퓨터 아키텍처로부터 추상화하여 공유 컴퓨터 플랫폼에서 여러 응용 소프트웨어와 운영체제들을 동작시킬 수 있도록 하는 가상화 기술을 차세대 소프트웨어 기반의 군용 시스템에 적용하는 추세이다[9,10].
기존 HILS 용도로 개발된 통합시험시스템은 개발 초기에 목표 체계의 하드웨어가 없는 경우, 체계 요구사항분석, 운용개념 설계, 대안분석 및 소프트웨어 통합시험을 수행하기 위한 SILS 환경으로 구성하는 것은 거의 불가능하다. 무기체계의 전 개발 순기에 필요한 M&S 요구 능력을 제공하기 위해서는 LVC 기반의 SILS 및 HILS 시뮬레이션이 가능한 M&S 시험환경을 제공하여야 한다. 여러 모의기 페더레이트(Federate)들을 각각의 Standalone 컴퓨터에 설치하여 운용하는 HLA 기반의 분산 시뮬레이션 환경에서는 시뮬레이션 및 시험 구성의 변경에 따라 M&S 환경을 재구성하고 재도구화 하는 데는 많은 비용과 시간을 지불하여야 한다[2]. 예를 들어 발사장치 모의기를 하나 추가하기 위해서는 발사장치 페더레이트를 설치할 컴퓨터가 필요하고, 해당 인터페이스 요구를 충족하기 위한 HLA/RTI 및 TCP(Transport Control Protocol) 통신채널을 추가하는 등의 비용을 지불해야 한다. 이를 해결하기 위해서는 변경하고자 하는 시험환경의 구성에 따라 컴퓨팅 자원의 재구성과 확장성이 용이하여야 한다. 또한 국내에서 개발되어 운용되고 있는 유도무기체계에 대하여 소요군으로부터 운용 소프트웨어의 변경 또는 성능개선 요구가 있을 경우, 운용 소프트웨어의 유지보수를 위한 개발환경을 30년 이상의 수명주기 동안 유지하는 것이 필요하다. 최근 IT 기술이 매우 빠르게 발전하는 현실에서 유도무기체계에 적용되는 하드웨어와 소프트웨어 또한 기술발전 추세에 맞게 최신 기술을 적용하고 있으므로, 현재까지 군에 배치된 유도무기체계별로 서로 다른 개발환경을 확보하고 유지하는 것은 매우 어려운 문제이다. 특히 그 당시 적용되었던 하드웨어와 소프트웨어 개발환경이나 부품들이 단종되어 유지보수가 불가하더라도, 해당 유도무기체계의 수명주기 동안에 소프트웨어 유지보수를 원활하게 수행하기 위해서는 많은 기술적인 문제점이 있고 경제적인 비용이 소요된다.
위의 어려운 문제점들을 해결하기 위해서는 첫 번째로, 응용 소프트웨어 및 시험환경의 변경에 따라 프로세서, 메모리, 네트워크 등의 컴퓨팅 자원을 쉽게 재구성하고 확장할 수 있는 LVC 기반의 SILS 및 HILS 시뮬레이션 환경이 요구된다. 두 번째로, 무기체계의 수명주기 동안에 유지보수를 원활하게 수행하기 위해서는 레거시 개발환경에서 실행되는 응용 소프트웨어들을 특정 컴퓨터 하드웨어와 운영체제로부터 독립적으로 실행시킬 수 있는 컴퓨팅 개발환경을 제공하여야 한다. 본 논문에서는 두 가지 요구사항을 충족하기 위하여 컴퓨팅 자원의 유연한 재구성이 가능하고, 응용 소프트웨어와 운영체제를 특정 하드웨어 플랫폼에 독립적으로 실행시킬 수 있는 베어메탈 가상화 기술을 활용한 교전통제 통합시뮬레이션 베드를 제안한다. 이를 대공유도무기체계에 적용하여 교전통제 통합시험시뮬레이션 베드를 구축한 후 교전모의실험을 통하여 제시한 베드가 재구성이 용이하고 비용 대 효과적임을 확인하였다.
본 논문의 1장에서는 연구 필요성과 배경에 대하여 논의하였고, 2장에서는 교전통제 통합시험시스템 요구사항을 분석하였다. 3장에서는 제안한 가상화 기반 교전통제 통합시험시뮬레이션 베드에 대한 설계 내용을 기술하였고, 4장에서는 대공유도무기체계에 대한 적용사례와 5장에서는 교전모의실험 결과를 제시하였다. 마지막으로 6장에서는 결론을 기술하였다.
교전통제 통합시험시뮬레이션 요구분석
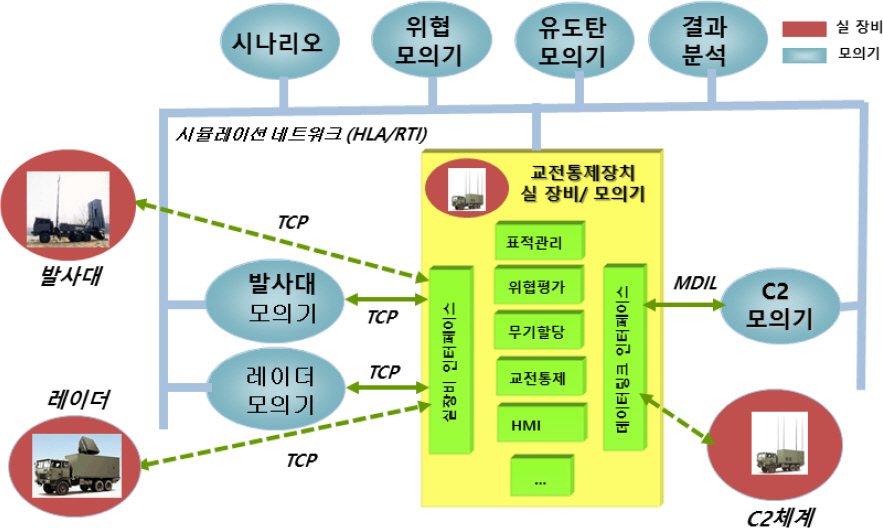
대공유도무기체계의 교전통제시스템은 Fig. 1과 같이 지휘통제 및 감시정찰 체계로부터 데이터링크를 통하여 전장정보를 공유하고 전장상황을 신속·정확하게 인식한다. 공중위협에 대한 위협평가, 무기할당, 교전계획을 수립하고, 대공유도무기체계의 유도탄 발사통제를 수행하여 유도탄을 발사시킨다. 또한 비행 중인 유도탄에 대하여 표적정보 갱신 등의 유도정보를 처리하며, 종말단계에서는 전장피해평가(Battle Damage Assessment)를 수행하여 표적의 피해여부를 평가하기까지의 교전체인 임무를 수행한다. 교전체인은 표적의 탐지부터 추적, 결심, 교전, 평가까지 일련의 순서로 수행된다.

본 장에서는 상기와 같은 교전통제 임무를 수행하는 대공유도무기체계 교전통제시스템의 개발과 시험평가를 수행하기 위한 모델링 & 시뮬레이션 요구사항에 대한 분석결과를 기술한다. V-모델 기반의 개발단계 중 체계 요구분석 단계에는 체계 수준의 성능과 운용개념을 분석하기 위한 시뮬레이션 환경이 필요하고, 설계 및 구현 단계에서는 소프트웨어 형상항목의 통합시험을 위한 SILS 환경이 요구되며, 소프트웨어 통합을 완료한 후 하드웨어/소프트웨어 통합과 체계수준의 통합시험을 위한 HILS 시뮬레이션 환경이 요구된다. 교전통제시스템의 통합시험시뮬레이션 환경 요소로는 전장환경, 지휘통제, 감시정찰, PGM 체계, 부 체계(Subsystem), 유도탄, 연동 네트워크가 있으며, 각 구성 요소별로 소요되는 시뮬레이션 요구사항은 Table 1과 같다. 각각의 모의모델은 시험환경 구성에 따라 해당 모의모델을 활용하거나 실 장비를 활용하여 LVC 시뮬레이션을 수행할 수 있어야 한다.
Table 1.
Requirement analysis results of ITSEC
| 구성 요소 | 시뮬레이션 요구사항 | 개발방안 |
|---|---|---|
| 전장환경 | 항공기, 탄도탄, 플랫폼, 전장환경 | 구성모델 |
| 지휘통제 | 지휘통제체계, 작전통제체계 | 구성모델실 장비 |
| 감시정찰 | 조기경보레이더, 조기경보기 | 구성모델 |
| PGM체계 | 요격체계 | 구성모델 |
| 부 체계 | 레이더, 발사대 | 구성모델실 장비 |
| 유도탄 | 유도탄 | 구성모델 |
| 네트워크 | HLA/RTI, DDS, TCP, UDP, LINK16[11], MDIL[12] | 구성모델 |
| 교전통제 | 교전통제시스템 | 구성모델실 장비 |
가상화 기반 교전통제 통합시험시뮬레이션 설계
분산 시뮬레이션 환경에서는 각 모의기 소프트웨어를 하나의 페더레이트로 할당하고 한 대의 Standalone 컴퓨터에 설치하여 운용하기 때문에 시험환경 변경 요구에 맞게 컴퓨팅 자원을 재구성하는 것은 많은 시간과 비용이 소요된다. 또한 여러 운영체제와 응용 소프트웨어를 포함하는 레거시 모의 모델들을 실행시키기 위한 컴퓨팅 환경을 제공하는 데도 많은 어려움이 따른다. 가상화 기술은 새로운 응용 소프트웨어를 기존의 하드웨어와 소프트웨어 구성환경에 쉽게 결합할 수 있도록 하는 가상화 환경을 제공하여 통합, 시험 및 운용을 위한 사람의 노력을 감소시켜 많은 비용을 절감할 수 있게 해준다[13]. 이들 분산 시뮬레이션 환경에서의 문제점들을 해결하기 위하여 레거시 운영체제 및 응용 소프트웨어들을 특정 하드웨어나 운영체제에 독립적으로 동작할 수 있게 하고, 시험환경 구성에 따라 물리적 컴퓨팅 자원을 효과적으로 배분하는 것을 가능하게 하는 컴퓨팅 자원의 가상화 기술을 교전통제 통합시험시뮬레이션 환경에 적용하였다. 대체로 응용 소프트웨어를 가상머신 기반으로 동작시키는 것은 물리적 머신에 직접 동작시키는 것과 비교해 3.3 % 정도 오버헤드가 발생하는 것으로 나타났다[14]. 요즈음 컴퓨터의 연산처리 능력이 급속도로 발전함으로 인해서 이 정도의 오버헤드는 가상화 기술의 장점들을 활용하기 위해서는 지불해야 하는 수준이라고 판단된다.
가상화 환경에서 하이퍼바이저(Hypervisor)는 호스트 컴퓨터에 여러 개의 운영체제와 응용 소프트웨어들을 동시에 실행할 수 있게 해주는 소프트웨어로 가상머신모니터(Virtual Machine Monitor)라고도 한다. Type1 가상화 방식은 Fig. 3과 같이 호스트 베어메탈(Bare- metal) 또는 네이티브(Native) 방식이라고 부르며, 하이퍼바이저가 호스트 운영체제 없이 하드웨어 위에 곧바로 설치되는 방식으로 하이퍼바이저가 직접 하드웨어를 제어할 수 있기 때문에 가상머신을 실행시키는 오버헤드가 적다. Type2 가상화 방식은 호스트 컴퓨터의 하드웨어에 호스트 운영체제를 설치하고, 그 위에 하이퍼바이저를 설치하는 방식으로 호스트 운영체제 위에서 하이퍼바이저가 구동되기 때문에 상대적으로 오버헤드가 크지만 호스트 운영체제가 하드웨어를 관리해 주므로 별도 관리도구가 필요 없다. 또 다른 가상화 방식인 컨테이너(Container)는 운영체제 수준의 가상화 기술로 호스트 운영체제를 공유하며 그 위에 여러 응용 소프트웨어를 실행시키는 격리된 환경을 제공하는 방식으로, 다른 가상화 방식에 비해 실행속도가 빠르다. 그러나 컨테이너 방식은 다양한 게스트 운영체제하에서 실행되는 응용 소프트웨어들을 동작시킬 수 없어 본 연구에서는 고려하지 않았다.

본 통합시험시뮬레이션 베드는 각각의 응용 소프트웨어를 서로 다른 운영체제 하에서 실행시킬 수 있는 동작환경을 제공하는 하이퍼바이저 가상화 방식 중에서 가상화 오버헤드가 적고 리소스 관리가 유연한 Type1 방식을 적용하였다. 가상화 기반 교전통제 통합시험시뮬레이션 베드는 Fig. 4와 같이 여러 호스트 컴퓨터들을 가상 네트워크로 연결하고, 각 호스트 컴퓨터의 하드웨어에 직접 하이퍼바이저를 설치하고 그 위에 게스트 운영체제와 응용 소프트웨어를 포함하는 가상머신을 실행시키는 Type1 가상화 방식으로 구성한다. 응용 소프트웨어를 가상화 기반으로 실행시키기 위해서는 시뮬레이션 개체들을 어떻게 페더레이트와 VM으로 할당하고 호스트 컴퓨터에 배분하여 실행시켜야 할지를 고려해야 한다. 즉 VM들을 어느 정도의 크기 단위(Granularity)로 나누어 호스트들 간에 컴퓨팅 부하 균형을 잘 유지하는지가 가상화 컴퓨팅 성능에 영향을 미친다. 여기서 개체는 주어진 기능과 역할을 실행하는 시뮬레이션 객체로 차량, 유도탄, 표적 등이 해당된다. 페더레이트는 하나 또는 여러 개체들을 HLA 시뮬레이션 개념으로 캡슐화한 컴포넌트이다. VM은 하나 또는 여러 개의 페더레이트들로 구성된 컨테이너이다. 호스트는 여러 개의 VM들을 동작시키는 하드웨어 자원을 제공하는 컴퓨터이다. 이때 기존의 분산 HLA 시뮬레이션 환경에서 사용하였던 레거시 모델을 VM기반 시뮬레이션 환경에서도 호환성을 유지하며 실행시키기 위하여 시뮬레이션 개체들을 페더레이트들로 캡슐화 하여 각각 VM에 할당하고, 페더레이트 VM들 간에는 HLA/RTI 통신으로 연동하도록 한다. 사용자는 각 호스트의 컴퓨팅 부하와 리소스를 분석하여 여러 호스트들 간에 부하 균형을 유지하도록 시뮬레이션을 수행하기 전에 VM들을 정적으로 할당하여 호스트들에 배치한다.
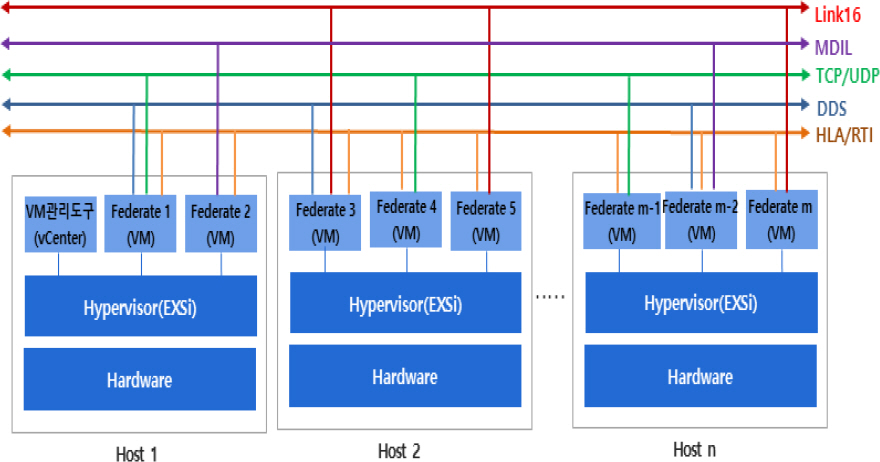
본 통합시험시뮬레이션 베드는 모의모델을 가상머신으로 할당할 때 멀티코어 CPU와 스토리지 뿐만 아니라 모의모델이 요구하는 연동 네트워크를 분배하는 것이 중요하다. 본 통합시험시뮬레이션 베드는 Fig. 4와 같이 구성하여 여러 페더레이트 VM들을 각각 멀티코어에 할당하고, 각 VM별로 소요되는 연동 네트워크는 하이퍼바이저가 제공하는 가상 네트워크(Virtual Network)에 할당한다. 교전통제 통합시험시뮬레이션 환경을 구성하는 모의모델들은 m개의 페더레이트 VM 들로 구성되고, n개의 호스트 컴퓨터들로 구성된다고 가정한다. 모든 페더레이트1~m VM들은 각각의 가상 네트워크 채널을 할당받아 HLA/RTI FOM(Federate Object Model)[15] 기반으로 객체(Object) 및 인터랙션 데이터를 상호 교환하기 위하여 HLA/RTI 통신용 네트워크로 연결된다. 페더레이트1, 3, m-2는 DDS 통신을 위하여 필요한 가상 네트워크 채널을 할당받아 DDS 통신용 네트워크로 연결된다. 이와 마찬가지로 페더레이트1, 4, m-1은 TCP/UDP 통신을 위하여 필요한 가상 네트워크 채널을 할당받아 TCP/UDP 통신용 가상 네트워크로 연결되고, 페더레이트3, 5, m은 Link-16 통신을 위하여 필요한 가상 네트워크 채널을 할당받아 Link-16 통신용 가상 네트워크로 연결된다. 가상머신 도구로는 VMware 사의 ESXi 베어메탈 하이퍼바이저[16]와 ESXi 하이퍼바이저 기반의 인프라 관리도구인 vCenter[17]를 사용한다. vCenter는 ESXi 호스트에 설치된 여러 가상머신들을 하나의 가상환경으로 생성하고 중앙에서 가상머신들을 관리해 주는 도구이다. 교전통제 통합시험시뮬레이션 베드는 호스트1~n에 각각 ESXi 하이퍼바이저가 설치되고 그 위에 여러 페더레이트 VM들이 설치된다. 또한 호스트1에는 vCenter가 설치되어 ESXi 하이퍼바이저 기반으로 설치된 가상머신과 호스트 자원의 관리를 수행한다.
가상화 기반 교전통제 통합시험시뮬레이션 베드에는 전체 시뮬레이션 시나리오 생성 및 배포와 페더레이트들의 운용과 시뮬레이션 결과의 로깅을 통제하는 운용통제장치 페더레이트가 있고, 페더레이트 VM들을 호스트 컴퓨터에 할당하고 VM 동작 상태를 모니터링하고 관리해 주는 vCenter가 설치되어 운용된다. 전체 시뮬레이션을 수행하는 운용자 측면에서 시뮬레이션을 통제하는 운용통제장치와, VM 관리를 담당해주는 vCenter도구를 별도로 이원화하여 운용하는 것은 매우 불편하다. 따라서 본 논문에서는 운용통제장치에서 각각의 호스트와 연동하여 페더레이트 VM들을 제어할 수 있도록 소프트웨어 원격제어기(Remote Controller)를 제시하였다. 운용자가 시뮬레이션 환경 요구에 따라 모의모델들을 VM들로 생성하여 각 호스트에 설치하고 가상화 시뮬레이션 환경을 구축하는 것은 vCenter 를 사용한다. 그 이후 구축된 가상화 통합시험시뮬레이션 베드에서 시뮬레이션을 수행하기 위하여 호스트에 설치된 VM들의 실행을 제어하고, 시뮬레이션 시나리오 관리와 운용은 운용통제장치 단독으로 수행하도록 한다.
원격제어기는 VM 운용을 제어하는 역할을 수행하기 위하여 ‘VM SW 목록 전송’, ‘VM SW 실행/종료’, ‘VM 전원해제’ 기능을 수행한다. 여기서 ‘VM SW 목록 전송’은 VM에 탑재된 SW 목록을 전송하는 것이며, ‘VM SW 실행/종료’는 VM에 탑재된 SW를 실행하고 종료하는 것을 의미하며, ‘VM 전원해제’는 가상환경의 VM 컴퓨터 전원을 해제한다는 의미로 VM에 탑재된 모든 운영체제와 SW를 종료시키는 것으로 윈도우 운영체제의 ‘시스템 종료’ 명령을 수행하는 것과 동일하다. 운용통제장치에서 VM 전원인가 기능은 vCenter에서 제공하는 유틸리티 프로그램을 사용하여 운용통제장치에서 직접 VM 전원인가를 수행할 수 있도록 하였다. 먼저 운용통제장치에서 VM을 실행시키기 위한 VM 전원인가 명령을 수행하여 VM을 실행시키면, 데몬 형태로 동작하는 원격제어기가 자동으로 실행된다. 원격제어기와 운용통제장치와는 UDP 통신으로 연결되며, 운용통제장치와 원격제어기간에 위의 기능을 수행하는 제어명령 메시지들을 사용하여 운용통제장치는 원격제어기를 통하여 VM들의 운용을 제어한다. Fig. 5에서 보여준 운용 시퀀스 다이어그램에서 운용통제장치와 원격제어기 간의 VM 운용제어를 위한 절차는 청색으로 표시하였다.
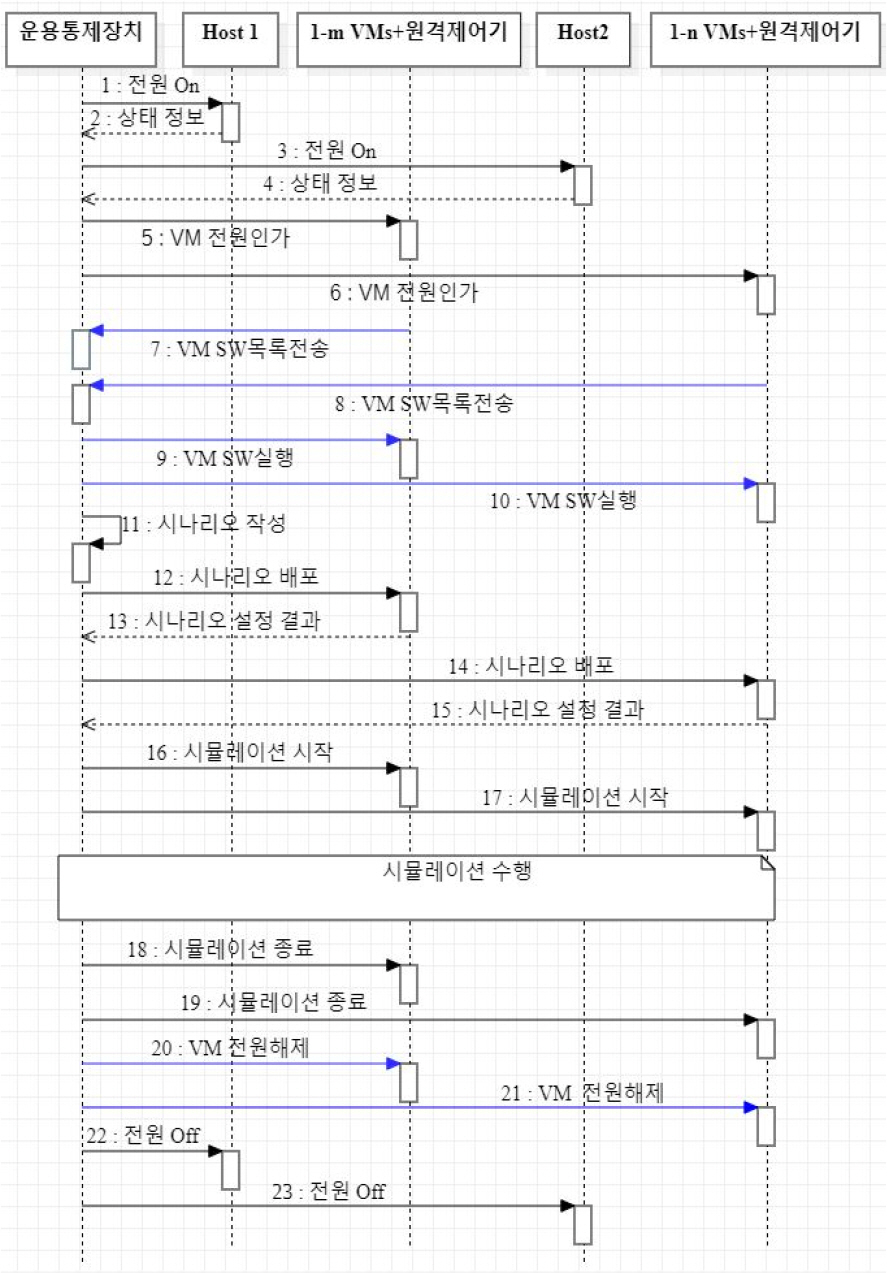
운용통제장치에서 원격제어기를 통하여 호스트 컴퓨터와 페더레이트 VM들을 제어하고, 시뮬레이션을 통제하는 시퀀스 다이어그램은 Fig. 5에서 보여준다. 전체 시뮬레이션을 통제하는 운용통제장치와 2대의 호스트가 구성되어 있고, 호스트1에는 m개, 호스트2에는 n개의 페더레이트 VM들이 설치되어 있는 시뮬레이션 환경에 대한 시퀀스 다이어그램이다.
운용통제장치가 각각의 호스트 전원을 On하면 각 호스트는 장비상태를 운용통제장치로 보낸다. 운용통제장치에서 VM별로 VM 전원인가 명령을 보내어 VM을 실행시키면 VM이 동작하고 VM별로 원격제어기 데몬이 실행된다. 원격제어기는 INI 파일을 로드하여 VM별로 탑재된 SW 목록을 운용통제장치로 전송한다. 운용통제장치에서는 시험환경 구성에 따라 VM 별로 필요한 VM SW을 선택한 후 각 VM에게 VM SW실행 명령을 보내어 VM에 탑재된 SW을 실행시킨다. 운용통제장치에서는 시뮬레이션을 수행하기 위한 시나리오를 편집해서 각 페더레이트 VM에게 해당 시나리오를 배포하고 각 VM으로부터 시나리오 설정결과를 받는다. 운용통제장치는 시뮬레이션 준비가 완료되면 시뮬레이션 시작 명령을 각 페더레이트 VM에게 보내어 시뮬레이션을 수행한다. 모든 시뮬레이션 수행이 끝나면 운용통제장치는 각 페더레이트 VM에게 시뮬레이션 종료 명령을 보내어 해당 페더레이트 VM에서 실행되고 있는 시뮬레이션을 종료한다. 그 다음으로 운용통제장치는 각 호스트에 동작되고 있는 모든 VM들에게 VM 전원해제 명령을 보내어 전체 VM 실행을 종료한다. 마지막으로 운용통제장치는 각 호스트의 전원을 Off하여 모든 시뮬레이션 운용을 종료한다. 따라서 운용통제장치는 소프트웨어 원격제어기를 통하여 운용자가 호스트 전원제어, VM 실행통제 및 시뮬레이션 운용통제를 단독으로 수행할 수 있는 시뮬레이션 환경을 제공한다.
적용사례
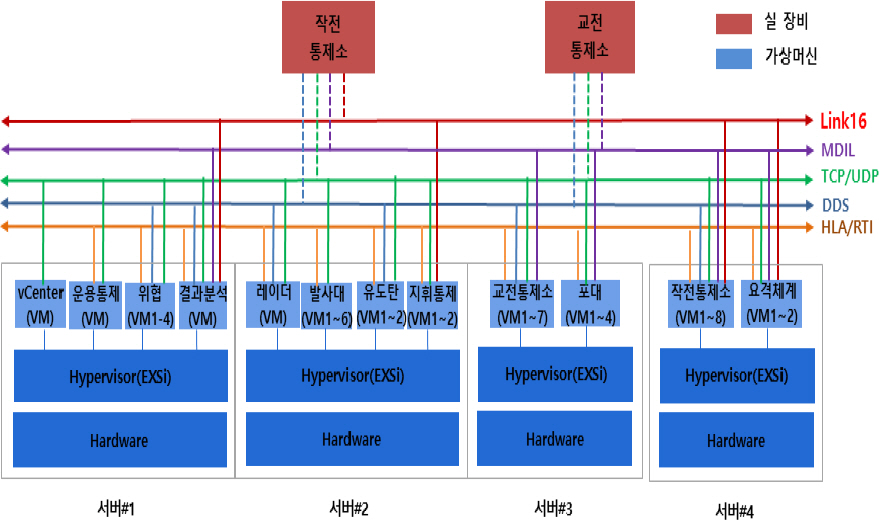
대공유도무기체계는 적 항공기 또는 탄도탄 공격으로부터 아군의 중요 시설 및 지역을 방어하는 유도무기이다. 대공유도무기체계는 상부 작전통제를 담당하는 작전통제소와 포대의 교전통제를 담당하는 교전통제소, 표적의 탐지/추적을 담당하는 레이더, 여러 발의 유도탄을 탑재하고 발사통제를 담당하는 여러 대의 발사대로 구성된다. 대공유도무기체계는 상부 지휘통제체계들과 연동하여 통합방공작전을 수행하며 인접의 요격체계들과도 연동된다. 대공유도무기체계의 작전통제소와 교전통제소의 통합 및 시험을 위해서는 공중위협, 지휘통제체계, 요격체계, 작전통제소, 교전통제소, 레이더, 발사대를 모의해주는 모의기 또는 실제 장비와 직접 연동하여 시험을 수행하기 위한 LVC 기반의 통합시험시스템이 요구된다. 또한 전체 모의기 들의 운용을 통제하고 시험 데이터를 기록하고 분석하기 위한 운용통제장치와 결과분석장치가 필요하다. 대공유도무기체계의 교전통제 통합시험시뮬레이션 베드는 Fig. 6과 같이 상당히 복잡한 분산 시뮬레이션 시험환경이 요구된다. 즉 작전통제소와 연동되는 지휘통제체계 모의기, 요격체계 모의기, 포대모의기, 실 교전통제소 또는 교전통제소 모의기로 이루어지며, 교전통제소와 연결되는 레이더모의기, 발사대모의기, 유도탄모의기, 실 작전통제소 또는 작전통제소 모의기로 구성된다. 각 모의기를 연동하기 위한 시뮬레이션 네트워크와 실 장비를 연결하기 위한 응용 네트워크를 구축하기 위해서 이더넷 기반의 HLA/RTI, DDS, TCP/UDP, MDIL, LINK-16 네트워크를 구성하여야 한다. 기존 방식대로 Fig. 6과 같이 분산 시뮬레이션 환경을 사용하여 교전통제 통합시험시뮬레이션 베드를 구축할 경우, 각 모의기 소프트웨어구성항목(Computer Software Configuration Item)을 하나의 물리적 컴퓨터에 할당하고, 각 이더넷 포트를 하나의 물리적 채널에 할당해야 하므로 Table 2에서 살펴본 바와 같이 총 38대의 Standalone 컴퓨터들과 111개 이더넷 채널들이 요구된다.
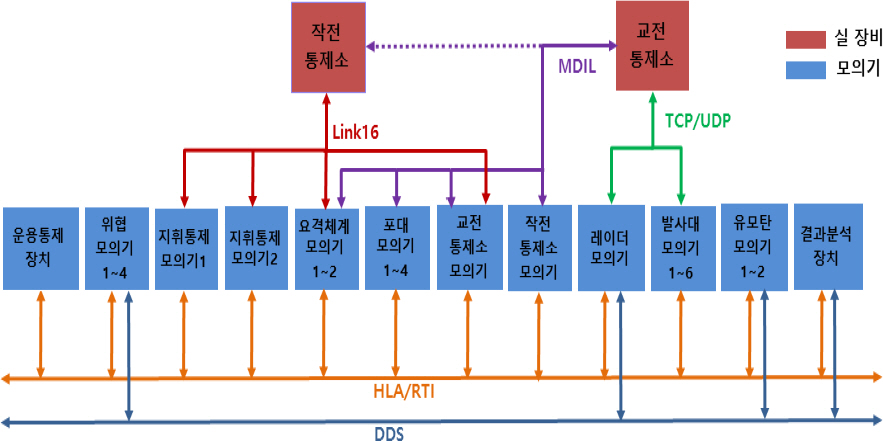
Table 2.
Computing resources for ITSEC bed
3장에서 제안한 가상화 기반 교전통제 통합시험시뮬레이션 베드를 적용하여 대공유도무기체계의 교전통제 통합시험시뮬레이션 환경을 Fig. 7과 같이 설계하였고, 가상화 컴퓨팅 환경의 구성과 성능은 아래와 같다.
○ 서버 : Dell PowerEdge R740 4조
- CPU : 3.1 GHz 20 Core, 2Way
- RAM : 256 GB
- SSD : 960 GB
- 네트워크
・ 10 Gb Quad Port NIC 2조
・1 Gb Quad Port NIC 2조
○ 스위치 : Juniper QFX5100-48T
○ 가상화 도구 : VMware ESXi, vCenter
모든 모의기 소프트웨어 구성항목들은 각 서버에 하이퍼바이저를 설치한 후 소프트웨어 구성항목별로 하나의 가상머신으로 생성하여 멀티코어에 할당하고, 요구되는 네트워크는 Ethernet 기반의 HLA/RTI, DDS, TCP/UDP, MDIL, LINK-16 채널을 가상 네트워크에 할당하여 구성하였다. 각각의 이더넷 채널을 연결하기 위하여 네트워크 스위치를 사용하였다. 국내외에서 개발된 기존의 많은 HLA/RTI 기반 통합시험시스템들은 하나의 컴퓨터에서 하나의 소프트웨어구성항목을 실행시키는 형태로 구축되었다. Table 2에서 요구되는 컴퓨팅 자원 요구사항을 기존 방식대로 하나의 소프트웨어구성항목을 하나의 컴퓨터에 할당하여 실행시킨다고 가정하면 38개 컴퓨터들이 요구된다. 가상화 컴퓨팅 환경에서는 38개 모의기 소프트웨어 구성항목들을 각각 가상머신으로 생성하여 서버의 멀티코어에 할당하고, 111개 이더넷 통신채널들은 각각 가상 네트워크에 할당함으로써 Table 2와 같이 4대 서버들이 필요하다. 본 논문에서 제시한 가상화 기반 통합시험시뮬레이션 베드는 기존 분산 시뮬레이션 환경과 비교할 경우 상당히 적은 컴퓨팅 자원을 사용하여 구축할 수 있었다. 따라서 무기체계의 전 수명 주기 동안 시험환경을 개발하고 유지하기 위한 컴퓨팅 자원, 설치 공간, 전력 소모 및 유지보수 등의 비용을 상당히 절감할 수 있다. 또한 시험구성 변경에 따른 컴퓨팅 부하와 통신채널 등의 컴퓨팅 자원의 추가 요구를 여유 용량의 CPU 멀티코어와 통신채널에 할당하여 컴퓨팅 자원을 유연하게 재구성함으로써 별도 추가 하드웨어를 구축하지 않고도 시험구성의 변경사항을 수용할 수 있는 확장성을 용이하게 제공할 수 있다.
교전모의실험
본 장에서는 가상화 기반 교전통제 통합시험시뮬레이션 베드를 사용하여 항공기 및 탄도탄 위협에 대하여 아군 지역을 방호하는 교전모의실험에 대한 결과를 기술한다. 대공방어용 요격체계의 교전모의실험을 수행하기 위해 교전통제소모의기, 레이더모의기, 발사대모의기, 유도탄모의기, 작전통제모의기, 위협모의기, 운용통제장치 및 결과분석장치를 사용하였다. Fig. 8은 이러한 교전모의실험을 수행하기 위하여 구성한 VM 환경을 보여주고, 사용된 모의기 VM 들은 청색, 사용되지 않은 모의기 VM들은 빗금으로 표시하였다.
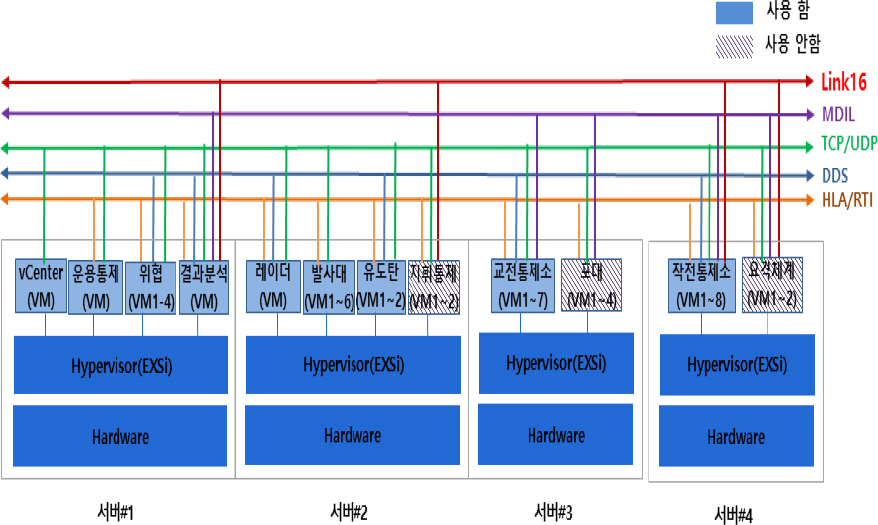
컴퓨팅 자원 재구성 관점에서 살펴보면, 서버1에는 vCenter, 운용통제장치, 위협모의기 4개 및 결과분석장치로 구성된 VM 7개를 실행시키기 위하여 vCenter에서 VM당 4개의 코어를 할당하면 총 코어 28개와 이더넷 네트워크 11개의 컴퓨팅 자원을 할당한다. 서버2, 서버3 및 서버4에서도 Fig. 8과 같이 할당된 VM들을 실행시키기 위한 컴퓨팅 자원을 서버1과 마찬가지로 vCenter에서 용이하게 재구성할 수 있음을 확인하였다. 응용 소프트웨어 재구성 관점에서 살펴보면, 서버2에는 레이더모의기, 발사대모의기 6개, 유도탄모의기 2개, 지휘통제모의기1, 지휘통제모의기2 VM들을 구성하여 할당한다. 서버1, 서버3 및 서버4에도 Fig. 8과 같이 응용 소프트웨어 VM들을 할당하여 실험구성에 맞게 재구성할 수 있음을 확인하였다. 또한 하나의 서버에 여러 운용체제를 사용하는 측면에서 살펴보면, 서버3에서는 Linux 운영체제 기반으로 동작하는 교전통제소모의기 VM 7개와 Windows 운영체제 기반으로 동작하는 포대모의기 VM 2개를 동일한 서버에 할당하여 운용하였다. Fig. 9는 운용통제장치 운용 화면으로 교전모의실험에서 구성한 모의기 들의 운용 상태를 보여주고, 각 모의기별 화면의 상단은 전원, 소프트웨어 실행 및 시나리오 배포 상태를 나타내고, 하단의 바 차트는 모의기별로 할당된 물리적 네트워크와 가상 네트워크의 연결 및 동작 상태를 보여주고 있다. 본 논문에서 제시한 원격제어기를 통하여 vCenter를 사용하지 않고 운용통제장치 단독으로 Fig. 9에서 보여준 상단 메뉴 바에서 청색으로 표시된 ‘전원인가’, ‘전원해제’, ‘SW실행’ 및 ‘SW종료’ 명령을 수행하여 VM 운용을 제어할 수 있음을 확인하였다. 이와 같이 가상화 기반의 교전통제 통합시험시뮬레이션 베드에서는 컴퓨터 하드웨어나 소프트웨어를 변경하지 않고도 사용자가 원하는 시험구성에 따라 컴퓨팅 자원과 VM들을 유연하게 재구성하여 필요한 교전모의실험을 수행할 수 있다.

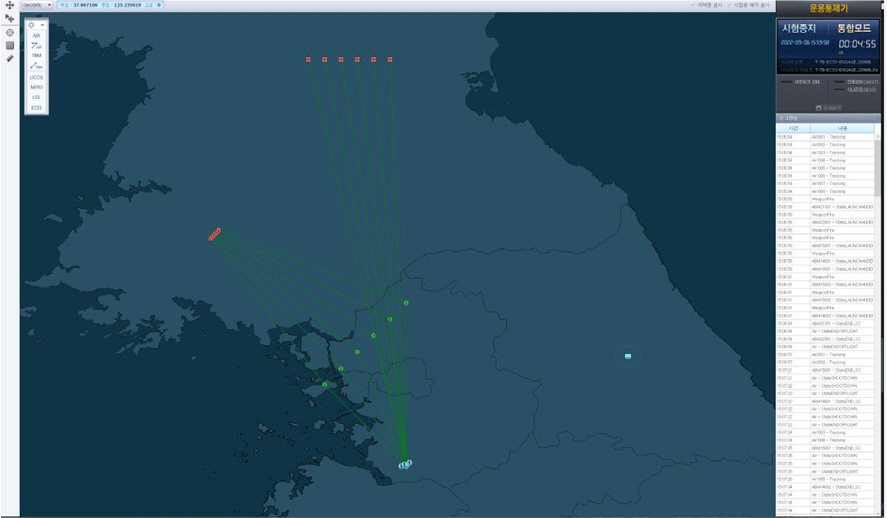
교전모의실험 시나리오는 적의 항공기 및 탄도탄 위협으로부터 아군 지역을 방어하기 위하여 Fig. 10과 같이 구성하였다. 레이더, 발사대 및 교전통제소로 구성된 요격체계는 서해안 지역에 배치하였고, 상부의 작전통제소는 강원도 지역에 배치하였다. 항공기 표적은 황해도 부근 비행장에서 6기가 이륙하여 서해안 지역을 공격하고, 탄도탄은 평남 지역에서 탄도탄 6기를 발사해서 서해안 지역에 탄착하도록 교전 시나리오를 설정하였다. 교전통제소 모의기에서 교전모드는 자동모드로 설정하여 항공기와 탄도탄 표적이 탐지되면 자동으로 교전계획을 수립하고 위협 표적에 대하여 최적의 요격탄을 선택하고 발사하여 교전하도록 하였다. Fig. 11은 원거리에 있는 항공기 표적 6기에 대하여 항공기용 요격탄 6기가 발사되어 표적을 향하여 비행하고, 근거리에서 날아오는 탄도탄 표적 6기에 대하여 탄도탄용 요격탄 6기가 발사되어 항공기와 탄도탄 표적에 대한 동시교전을 수행하고 있다.
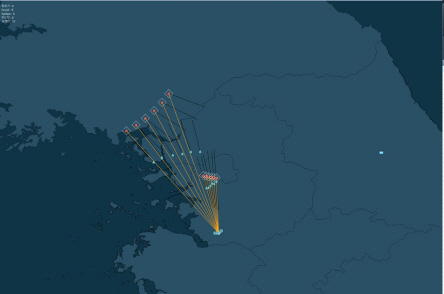
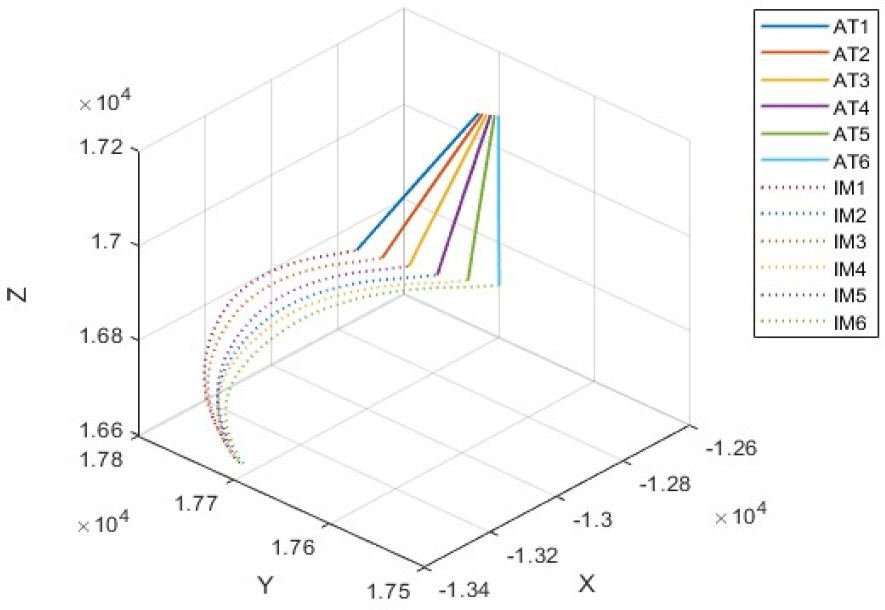
아래 Fig. 12와 13은 결과분석장치에 기록된 데이터를 임의로 가공하여 전체적인 비행궤적의 형태만을 보여주기 위한 그림으로 절대적인 위치 값은 의미가 없다. Fig. 12는 실선으로 표시된 항공기 표적 6기에 대하여 점선으로 표시된 요격탄 6기가 발사되어 항공기 표적을 요격하는 비행 궤적을 보여준다. Fig. 13은 실선으로 표시된 탄도탄 표적 6기에 대하여 점선으로 표시된 요격탄 6기가 발사되어 탄도탄 표적을 요격하는 비행 궤적을 나타낸다. 위에서 설명한 바와 같이 사용자가 원하는 시험환경과 교전모의실험 요구사항에 따라 본 연구에서 개발한 가상화 기반 교전통제 통합시험시뮬레이션 베드를 사용하여 특정 모의모델들을 가상머신들로 생성하여 할당하고, 시험환경에 필요한 컴퓨팅 자원을 재구성한 후 교전상황 시나리오를 설정하여 교전모의실험을 효과적으로 수행할 수 있었다.

결 론
지난 수십 년 동안 무기체계의 개발과 시험평가를 수행하기 위하여 M&S 기반의 분산 시뮬레이션 기술을 활용한 통합시험환경을 활발히 연구하고 활용해 왔다. 본 연구에서는 분산 시뮬레이션 환경에서의 어려운 문제점을 해결하기 위하여 컴퓨팅 자원의 재구성이 용이하고 레거시 소프트웨어의 운용환경을 효과적으로 제공할 수 있는 베어메탈 기반의 가상화 기술을 활용한 교전통제 통합시험시뮬레이션 베드를 제시하였다. 이를 대공유도무기체계에 적용하여 설계하고 구현한 후 항공기 및 탄도탄 표적의 대공방어에 대한 교전모의실험을 효과적으로 수행할 수 있었다. 본 교전통제 통합시험시뮬레이션 베드는 LVC 기반의 SILS 및 HILS 시뮬레이션 환경을 제공하고, 시험환경 구성에 따른 컴퓨팅 자원의 재구성과 확장이 용이하며, 레거시 어플리케이션을 하드웨어나 운영체제에 독립적으로 실행시킬 수 있는 운용환경을 유연하게 제공할 수 있다. 또한 무기체계의 수명주기 동안 시험환경을 개발하기 위한 컴퓨팅 자원과 유지보수 비용을 상당히 절감할 수 있다는 것을 확인하였다.
추후 서버의 고장 등으로 통합시험시뮬레이션 베드의 운용이 중단된 경우, 고장을 탐지하고 시험환경 구성에 따른 응용 소프트웨어 부하를 컴퓨팅 자원에 맞게 동적으로 재할당하고 복구할 수 있는 고장감내 기법의 연구도 필요할 것으로 판단된다.




