



기 호 설 명
η: EOTS Pan 각도(엔코더)
J: 관성모멘트
Tm : 모터토크
Td : 외란토크
fc : Closed-Loop 대역폭
ω : 가진주파수
1. 서 론
EOTS는 전자광학추적장비로서 운용자의 고품질의 영상을 제공할 뿐만 아니라 표적 혹은 좌표를 탐지, 추적, 지향 등 다양한 임무를 수행한다[1,2]. 이와 같은 임무를 수행하기 위해서는 EOTS가 장착되는 플랫폼으로부터 전달되는 외란(토크외란)에도 LOS오차를 최소화해야 한다. 이를 목적으로 고안된 알고리즘을 ‘안정화 알고리즘’이라고 한다. 관성공간에서 LOS오차를 자이로로 측정하고 이 신호를 피드백 받는 구조로 EOTS에 적용된다. 안정화 알고리즘은 현재까지 다양하게 개발되어 왔으며, 본 논문에서는 PID제어기의 단점을 보안하고 선형시불변시스템에 적용이 가능한 알고리즘을 적용하였다. 알고리즘 성능을 평가하는 방법으로는 대표적으로 대역폭 평가와 rate table을 이용하여 LOS오차를 평가하는 방법이 있다. 대역폭 평가의 경우 입출력 신호를 비교하여 시스템이 입력을 얼마나 빨리 추종하는지 그리고 오차를 얼마나 빨리 보상하는지를 판단할 수 있다[3,4,5]. 이는 다양한 시스템들을 동일한 환경에서 성능을 비교할 수 있다는 장점이 있지만 안정화 성능을 간접적으로 확인해야 한다는 단점이 있다. 또 다른 방법으로는 ‘rate table’을 이용하는 방법이다[6,7]. Rate table은 다양한 외란(회전운동)을 발생시킬 수 있는 장비이다. Rate table에 EOTS 를 고정하고 특정 외란을 발생시켜 안정화 성능을 정량적인 값으로 확인할 수 있다는 장점이 있다. 하지만 이 방식은 설비구축에 많은 예산이 소요되고 외란조건을 어떻게 설정하느냐에 따라 실험환경이 달라지므로 상호 비교가 어려운 단점이 있다.
본 논문에서는 EOTS에 적용되는 운동방정식을 분석하고, 외란에 강인한 제어기 설계하였다. 설계된 알고리즘은 대역폭 실험을 통해 주파수영역에서의 성능을 확인하였으며 이와 더불어 외란모델을 이용한 시간영역에서의 성능 또한 확인하였다. Rate table이 없는 환경에서 시간영역의 성능을 확인하기 위해 ‘외란모델’을 고안하여 성능평가를 수행하였다. EOTS에 발생하는 외란을 분석하고 이를 모사한 외란모델을 설계하는 방안을 제시하고 최종적으로 실제 시스템에 외란모델을 적용하여 안정화 성능을 측정하였다.
2. EOTS 안정화 알고리즘
2.1 EOTS 좌표계
Fig. 1은 EOTS의 좌표계 구성을 보여주고 있다. EOTS가 장착되는 부분을 나타내는 Platform좌표계(Oplf)와 Zplf축을 중심으로 회전하는 Pan좌표계(Opan)가 존재한다[8]. Tilt축 좌표계도 또한 존재하나 본 논문에서는 Pan좌표계를 중심으로 서술한다. Pan좌표계의 회전축에는 ‘관성공간 각속도’를 측정하는 자이로 (θz.pan)와 Zplf축을 중심으로 Platform좌표계와 Pan좌표계의 ‘상대회전량’을 측정하는 엔코더(η)가 장착되어 있다.

Pan좌표계는 Platform좌표계를 기준으로 엔코더만큼 회전한 좌표계이다. 이를 각속도행렬로 표현하면 식 (1)과 같이 표현할 수 있다. 여기서 θ ˙ z / p a n θ ˙ L O S
2.2 EOTS 운동방정식
EOTS는 3차원 회전이 발생하는 환경에서 운용되기 때문에 다음 식 (2)와 같이 오일러 운동방정식이 적용된다.
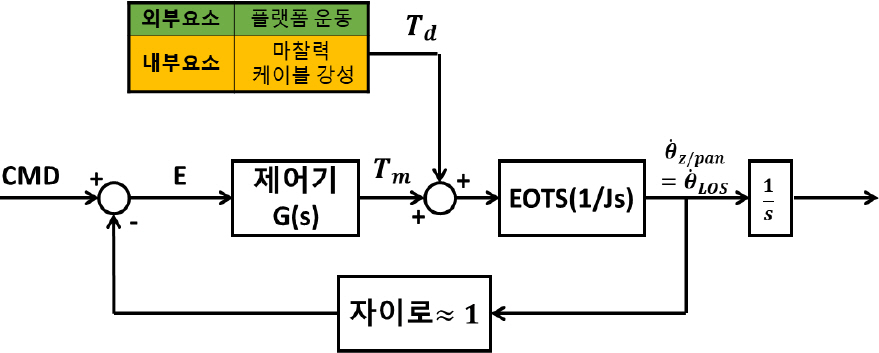
식 (2)의 오른쪽 항은 모터토크(Tm)와 EOTS 회전축에서 발생하는 마찰력, 케이블 강성 등을 의미하는 내부 토크외란(Td/in)으로 이루어져 있다[9]. 식 (2)를 θ ˙ z / p a n
(3)
식 (3)에서 알 수 있듯이 외부의 각속도, 각가속도에 의해 외부 외란토크(Td/out)가 발생하게 된다. 모터토크 외의 나머지 항들은 LOS오차를 발생시키는 외란성분이며, 이를 상쇄시키도록 모터토크를 조절하도록 안정화 알고리즘은 설계된다. 본 논문에서는 토크외란을 외부 토크외란과 내부 토크외란으로 구분하여 분석을 수행하였다.
2.3 안정화 알고리즘 설계
EOTS는 운용자가 감시정찰 임무를 수행할 수 있도록 고품질 영상을 제공해야한다. 특히 외란에 의해 LOS오차가 발생하더라도 실시간으로 빠르게 보상이 이루어져야 한다. 안정화 알고리즘은 Fig. 2와 같이 자이로를 통해 LOS를 측정하고 피드백루프를 사용하여 사용자의 명령을 추종하도록 알고리즘이 구성되어 있다.
(4)
이상적인 EOTS의 구조는 외란토크가 0으로 오직 모터토크에 의해서만 LOS가 변하는 방식이다. 하지만 실제 환경에 회전축에서 발생하는 내부 외란토크와 플랫폼으로부터 전달되는 외부 외란토크가 발생한다. EOTS에 전달되는 외란토크는 넓은 대역으로 분포되어 있으며, 이러한 외란특성에 대응하고 LOS오차를 최소화하기 위해서는 높은 대역폭을 가진 안정화 알고리즘이 필요하다. 높은 대역폭 설계에 유리한 제어기는 Type2형태이며, Fig. 3은 Type2에서 나타나는 외란에 대한 주파수응답특성이다[10].
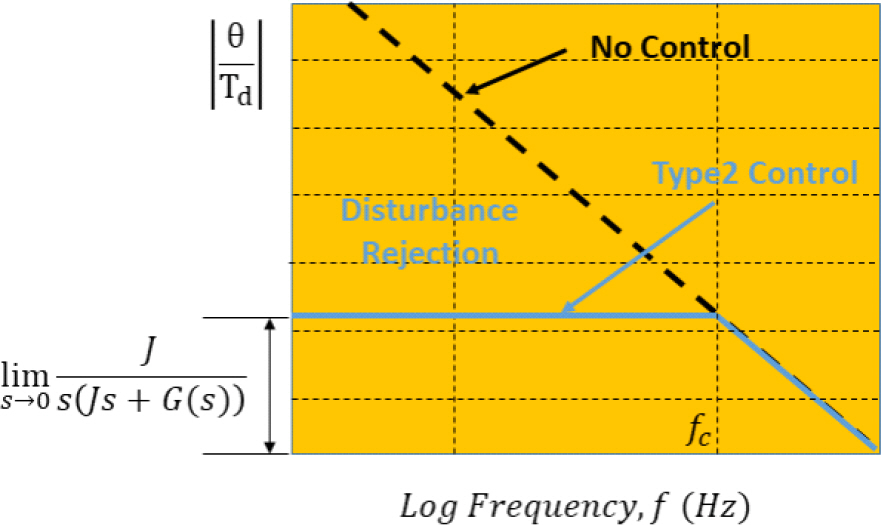
Fig. 3은 시스템의 Closed-Loop대역폭(fc)이 높을수록 더 높은 주파수 외란에 대응할 수 있고 더불어 외란에 대한 강인성 증가를 의미한다. EOTS와 같은 서보시스템에 대표적으로 적용되는 Type2제어기는 PID 이다. PID제어기는 PI제어기에서 발생하는 위상지연을 D제어기를 통해 보상할 수 있다. 하지만 D제어기는 주파수가 높아질수록 신호를 증폭시키는 경향이 있어 센서잡음과 같은 고주파신호에 의해 시스템을 불안정하게 만들 수 있다. 이러한 불안정성을 방지하기 위해 D제어기를 Lead보상기로 대체하였다. Lead보상기는 필요한 만큼만 위상보상이 가능하고 고주파신호를 증폭시키지 않는 특성이 있어 안정적인 제어알고리즘 설계에 유리하다.
Fig. 4는 EOTS에 적용된 알고리즘으로 명령과 자이의 오차를 측정하고 고주파 잡음을 제거하기 위해 LPF (Low Pass Filter)를 추가하였다. PI제어기는 외란으로 발생하는 오차를 보상하는데 탁월한 성능이 있지만 위상지연을 발생시킨다는 특성에 높은 대역폭 확보에 방해요인으로 작용한다. 이를 보상하기 위해서 Lead보상기를 직렬형태로 연결하여 위상지연을 보상하였다[11]. 제어기 출력은 모터의 최대토크로 제한을 두었으며, Anti-Windtup기법을 이용하여 적분포화를 방지하였다[12]. 즉 Fig. 2의 제어기는 LPF-PI-Lead형태로 적용되었으며, Laplace-domain으로 표현하면 식 (5)와 같다.
(5)
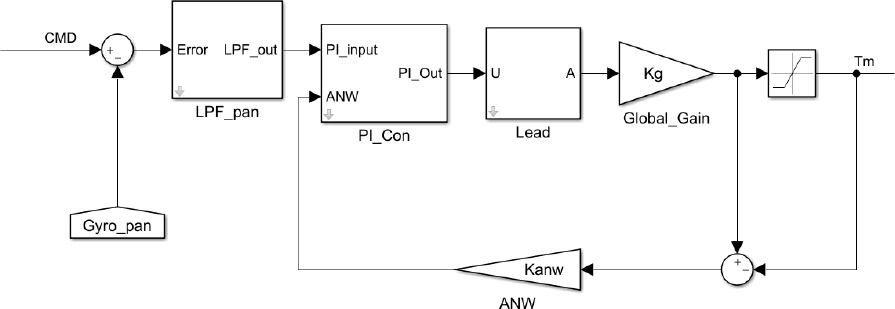
위상지연을 최소화하기 위해 LPF의 차수를 1차로 설정하였다. 식 (5)에 사용되는 변수들은 시정수(τ), 전역이득(Kg), 비례이득Kp, 적분이득Ki, Lead(s)의 분모 항(a), 분자 항(b)를 의미한다. 식 (5)를 식 (4)에 대입하고 입력(CMD(s))을 0으로 간주하면 식 (6)과 같이 외란토크(Td(s))에 대비 LOS진폭을 예측할 수 있다.
Fig. 3에서 보여주듯이 스탭외란(Td = 1/s)에 대한 LOS진폭을 산출하면 알고리즘의 안정화 성능을 예측할 수 있다. 이를 위해 식 (7)과 같이 스탭외란에 대한 최종값 정리를 이용하면 안정화 알고리즘의 강인성을 예측할 수 있다[13].
식 (7)을 통해 알 수 있듯이 외란감쇠성능은 제어기의 영점의 곱과 비례하는 것을 알 수 있다. 충분한 외란감쇠성능과 안정적인 제어특성을 위해 Open-Loop의 이득교차점을 30 Hz 이상, 위상여유를 50~40도가 되도록 설계하였다[14,15]. 제어기의 변수는 Table 1과 같이 선정하였다.
Table 1.
Controller(G(s)) parameters
| 구분 | 변수 | 값 |
|---|---|---|
| LPF(s) | τ | 1/(160π) |
| PI(s) | Kg | 0.8912 |
| Kp | 1 | |
| Ki | 10π | |
| Lead(s) | a | 498 |
| b | 86 |
Table 1의 계수를 식 (7)에 대입하면 외란에 대한 강인성은 -13.69 dB로 예측할 수 있다. 또한 동일한 LPF가 적용된 LPF-PID와 LPF-PI-Lead의 주파수응답특성을 비교하게 되면 Fig. 5와 같은 특성을 확인할 수 있다.
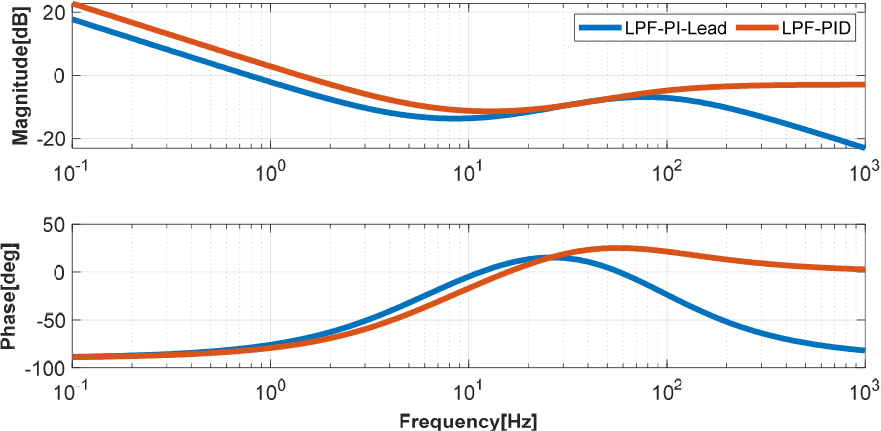
Fig. 5에서 보여주듯이 LPF-PI-Lead는 저주파대역에서는 충분한 진폭비(Magnitude)를 가지고 있다. 또한 PID제어기는 달리 고주파로 넘어갈수록 진폭비가 감소하는 것을 알 수 있다. 즉 사용자의 명령을 잘 추종함고 동시에 PID의 문제점을 개선하여 잡음의 영향은 약해지도록 설계된 것을 확인할 수 있다. 이와 더불어 위상(Phase)선도에서 확인할 수 있듯이 30 Hz 부근에서 위상이 보상되는 것을 확인할 수 있다.
2.4 EOTS 주파수응답특성
Type2제어기가 적용된 EOTS의 응답특성을 확인하기 위해 주파수 응답특성실험을 진행하였다. DSA(Dynamic Signal Analyzer)으로부터 각속도 명령이 EOTS로 전달되면 Fig. 6과 같은 흐름을 통과한 후 자이로신호가 DSA로 전달된다. 가진주파수(ω)를 변화시키면서 각속도 명령과 자이로 신호를 비교하면 EOTS의 응답특성을 확인할 수 있다.
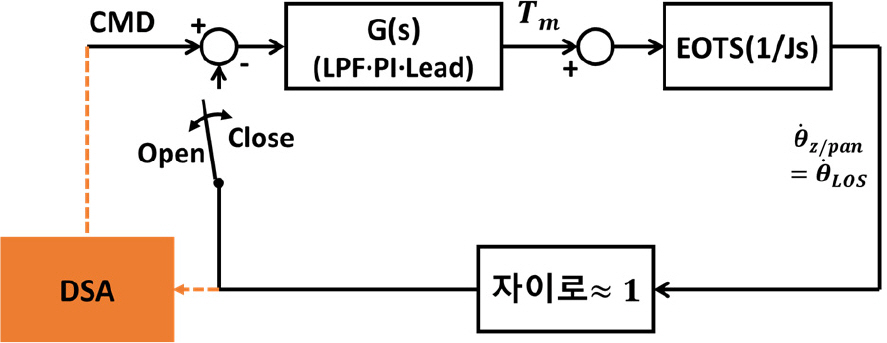
각속도 명령의 주파수를 변화하면서 자이로신호와 비교하였다. 주파수응답특성은 Open-Loop, Closed-Loop 두 가지 모두 수행하였으며, 우선적으로 Open-Loop에서의 이득교차점과 위상여유를 확인하여 상대안정도를 평가하고. 그 이후 Closed-Loop의 대역폭을 확인하였다. Fig. 7은 Open-Loop상황에서 EOTS 주파수응답특성을 보여주고 있다.
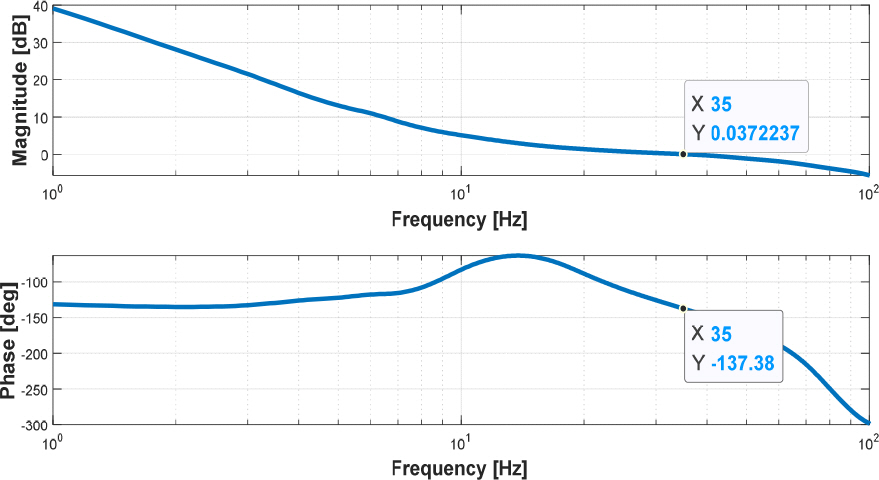
Fig. 7에서 보여주듯이 Open-Loop 주파수응답특성은 저주파에서 높은 진폭비를 가지고 있어, 명령 추종에 탁월한 응답을 가지고 있는 것을 알 수 있다. 또한 이득교차점은 35 Hz로 측정되었으며, 위상여유는 42.62°로 시스템의 상대안정도도 탁월한 것을 알 수 있다. Fig. 6의 스위치를 close시키면 EOTS의 Closed-Loop대역폭을 측정할 수 있다. 대역폭 측정 시 가진주파수가 증가할수록 구동 가능한 최대 각속도가 감소하기 때문에 측정신호에서 잡음의 영향이 증가하게 된다. Fig. Fig. 8은 저주파(5 Hz)와 고주파(60 Hz)에서의 대역폭 실험 시 잡음의 영향을 단편적으로 보여주고 있다.

Fig. 8에서 보여주듯이 60 Hz에서는 잡음에 의해 진폭의 크기를 결정하기 어려워진다. 이러한 잡음의 영향을 상쇄시키기 위해 RMS(Root Mean Square)를 이용하여 진폭비를 계산하였다. 1000 Hz 간격으로 신호를 측정 시 Sine파형의 주기가 30주기 이상이면 식 (8)과 같이 근사화 할 수 있다.

Fig. 9에서 보여주듯이 Sine파형이 30주기 이상일 경우 모든 주파수영역에서 잡음과 위상의 영향을 상쇄한다는 점을 검증하였다. 안정화 대역폭(fc)은 60 Hz 이상으로 판단하여 10 Hz 간격으로 진폭비를 산출하였다. 측정 결과는 Fig. 10에 나타내었다.

Table 2.
Magnitude of EOTS in closed loop
| Freq (Hz) | CMD (RMS) | Gyro (RMS) | Mag. (dB) |
|---|---|---|---|
| 60 | 0.7071 | 1.5465 | 6.80 |
| 70 | 1.4142 | 1.4216 | 0.05 |
| 80 | 1.4142 | 0.9517 | -3.44 |
Closed-Loop에서의 대역폭은 Magnitude(dB)가 -3 dB 를 갖는 주파수를 의미한다. 즉 본 논문에서 사용된 EOTS의 안정화 대역폭은 약 80 Hz 부근에 도달한 것을 확인할 수 있으며, 이는 안정화 알고리즘이 넓은 주파수대역을 가진 외란으로부터 LOS오차를 보상할 수 있다는 점으로 해석할 수 있다.
3. 외란모델 설계
외란모델을 설계하기 위해 관성행렬은 주파수실험과 3D모델링을 이용하여 측정하였으며, 플랫폼에서 발생하는 각속도( θ ˙ → p l f )
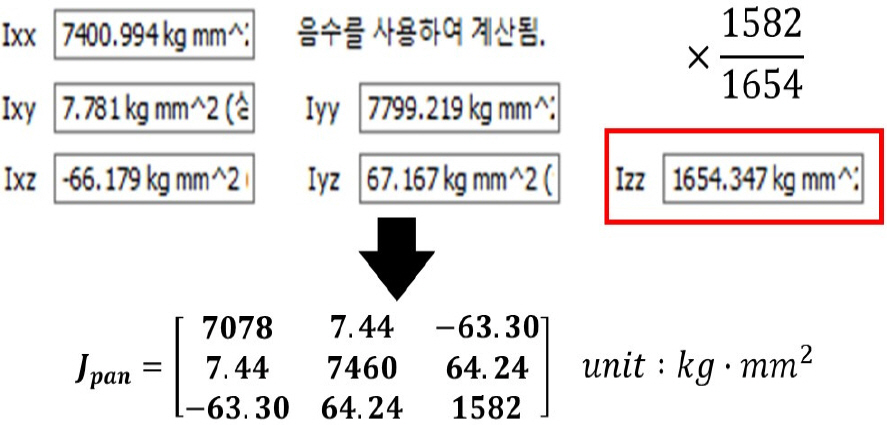
3.1 관성행렬 측정
식 (2)의 변수인 관성행렬은 전달함수의 주파수 특성을 이용하여 측정할 수 있다. EOTS를 선형시불변시스템으로 가정하면 식 (9)과 같이 표현할 수 있다. 여기서 b와 k는 각각 회전축에서 발생하는 점성계수와 강성계수를 의미한다.
식 (9)를 주파수에 따른 전달함수의 크기로 나타내면 식 (10)과 같이 표현된다. 회전축의 관성모멘트는 가진주파수의 제곱과 곱해지므로 가진주파수가 높아질수록 관성모멘트 항이 지배적으로 변하게 된다.
Pan축의 관성모멘트(Jzz/pan)를 측정을 위해 30 Hz Sine파형을 모터토크를 인가하였다. 잡음의 영향을 줄이기 위해 측정된 데이터의 RMS를 이용하여 진폭비를 계산하였고 Fig. 11은 30 Hz Sine파형에 대한 입출력(입력 : Tm, 출력 : θ ˙ z / p a n = θ ˙ L O S

3.2 플랫폼각속도 분석
개발 중인 EOTS가 장착되는 플랫폼의 종류는 드론이다. 드론이 비행 중에 발생하는 외란은 마운트를 통해 1차적으로 감쇠가 일어나고 마운트에서 감쇠되지 않은 외란이 EOTS에 전달되게 된다. 즉, EOTS의 외란은 마운트를 통과한 외란을 의미한다. 본 논문에서는 드론이 호버링(Hovering) 중 발생하는 각속도를 측정하였으며, 이를 기반으로 한 외란모델을 설계하기 위해 Fig. 13과 같이 하드웨어를 구성하여 데이터를 취득하였다.

무선통신 모듈을 이용하여 샘플링 간격은 200 Hz로 IMU와 GCS가 통신되도록 하드웨어를 구성하였다. 측정된 플랫폼각속도의 특성을 파악하기 위해 랜덤진동분석에 탁월한 PSD(Power-Spectrum-Density)을 산출하였다[16]. 그 결과는 Fig. 14에 나타내었다. x축은 Log10 (주파수), y축은 10*log10(PSD) Scale을 사용하였다.

측정된 신호를 DSP(Digital Signal Processor)에서 구현하기에는 어려움이 있어 동일한 PSD선도를 나타낼 수 있도록 정규화를 진행하였다[17]. 파랑선도는 측정된 신호의 PSD그래프이며, 주황선도 주파수를 1/3Octave 간격으로 총 25개의 대표주파수로 분리한 PSD선도이다. 두 선도는 동일한 PSD값이 나타내고 있으며, 주황선도로 표현되는 랜덤진동은 식 (11)과 같이 총 25개의 Sine파형을 조합하여 표현할 수 있다. 여기서 기호 t, ϕ는 각각 시간과 위상을 의미한다. 위상(ϕn)은 주파수별로 랜덤하게 설정하였다.
3.3 외부 외란토크(Td/out) 설계
Fig. 15와 같이 정규화된 각속도는 최종적으로 토크외란으로 변환해야 한다. Fig. 16에 나타나 있는 절차를 통해 Matlab/Simulink환경에서 가상의 외란토크를 만들어 낼 수 있다.


4. 실험 및 결과
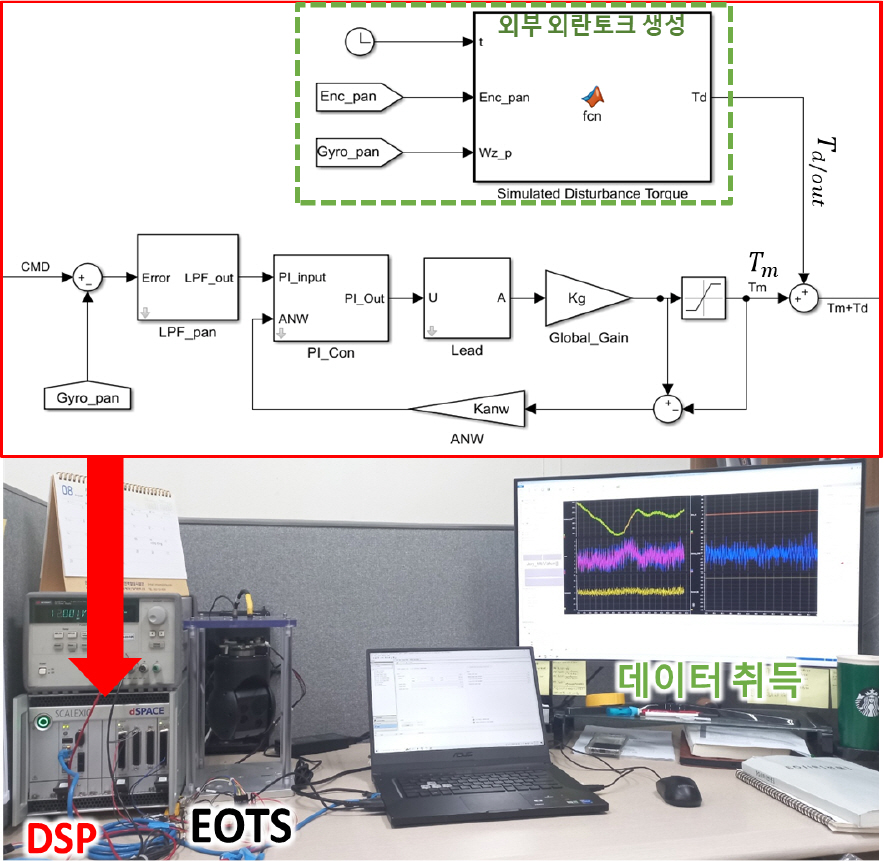
EOTS의 안정화 알고리즘 개발과 성능예측을 위한 환경은 Fig. 17과 같다.
DSP는 EOTS에서 측정된 엔코더와 자이로신호를 피드백 받아 Fig. 17의 안정화 알고리즘을 수행과 동시에 외란모델을 생성한다. 외란토크는 Fig. 16의 절차를 통해 제어기출력과 합쳐진다. 합쳐진 최종신호에 따라 EOTS의 모터에서 토크가 발생되고 Pan축의 LOS 가 움직이게 된다. 안정화 성능을 예측하기 위해 실험시간 50초, 총 5번의 실험을 수행하였으며, 측정된 신호의 RMS로 LOS오차를 산출하였다. Table 3은 각 회당 LOS오차를 보여주고, Fig. 18은 5회 차에 측정된 LOS오차와 외란토크를 나타내고 있다. 총 5번의 실험동안 최대 68.60 urad(rms), 최소 54.68 urad(rms)이 측정되었으며, 평균적으로 60.41 urad(rms)이 측정되었다.

실험결과 플랫폼(드론)이 비행중인 상황에서도 EOTS 는 안정화 알고리즘을 통해 LOS를 유지하는 것을 예상할 수 있다. LOS오차의 평균치인 60.41 urad는 EOTS로부터 1 km 떨어진 지점에서 약 6 cm 오차를 의미하며, 운용자에게 균일하고 고품질 영상을 제공할 수 있는 충분한 성능이다.
5. 결 론
EOTS는 플랫폼의 흔들림에도 영향을 받지 않고 균일한 영상을 전달해야한다. 본 논문에서 외부 외란이 전달되더라도 관성공간에서 LOS를 유지할 수 있는 안정화 알고리즘을 제시하였다. 외란에 대해 강인한 제어기를 설계를 위해서는 높은 Closed-loop대역폭이 필요하며, 이를 만족하기 위해 LPF-PI-Lead제어기를 제시하였다. LPF-PI-Lead제어기는 PID제어기의 단점을 보안할 수 있는 탁월한 성능을 지닌 제어기로, 저주파영역에서는 고이득을 보장하는 동시에 고주파 성분을 감쇠시켜 시스템의 안정성을 향상시킬 수 있다. 더불어 목표 이득주파수에서 충분히 위상지연을 보상하여 높은 대역폭 설계에 매우 유리한 제어기이다. 또한 Fig. 3과 식 (7)을 통해 주파수영역에서의 강인성을 손쉽게 예측할 수 있는 장점을 지니고 있다.
제시한 알고리즘의 성능을 확인하기 위해 EOTS의 운용환경에서 발생하는 외란을 모사하는 방안을 제시하였다. PSD를 이용하여 정규화된 각속도와 식 (10)과 3D 모델링 프로그램을 통해 예측된 관성행렬을 변수로 외란모델을 모사하였다. 모사된 외란모델은 제어기 출력과 합쳐져 시간영역에서 정량적인 시선안정화 성능을 예측할 수 있는 가상환경을 조성하였다. 제시한 절차를 통해 설계된 외란모델은 운용환경에서 발생하는 다양한 외란토크를 모사할 수 있는 점, rate table과 같은 고가의 설비가 없는 개발환경에서도 EOTS의 시선안정화 성능을 예측할 수 있다는 점 그리고 3차원 회전이 일어나는 모든 시스템에 적용할 수 있는 범용성을 가진다는 장점이 있어 개발 간 성능예측에 있어 개발비용과 시간을 단축할 수 있는 방안이라 판단된다. 추후 선회, 급기동 등 다양한 조건의 데이터를 추가하고 Pan/Tilt가 서로 커플링되어 있는 관계를 적용하여 단일 축이 아닌 2축 모두 적용이 가능도록 개선된 외란모델을 연구할 예정이다.




