



1. ģ ė”
ėÆøė ģ ģ„ ķź²½ģ ģķ ė° ģģ ź°ė
ģ ė³ķģ ė°ė¼ ķź²©ģķģ²“ź³(Kill-Chains)ė” ģ§ķķź³ ģģ¼ė©°[5], ź³ ģ¬ģ/ź³ ė¹ģ©ģ ģė¹ė ėØģ¼ ģ²“ź³ ģ¬ģ“ģ ģ¬ģ ģ ģė ģ ė³“źµķģ ģ ģ ģø źµ¬ģ”°ė„¼ ź°ģ§ ė³µķ©ģ²“ź³(System of System) ė³“ė¤ ģ ģ°ķ ģ ė³“ ź²½ė”ė„¼ ķµķ“ ė ė§ģ ģ§ķģ²“ź³ ė° ķź²©ģ²“ź³ė„¼ ģ°ź²°ķ ģ ģė ģ ģķ ķ¬ģ¹(Kill Web) ź°ė
ģ“ ėģ
ėź³ ģė¤. ėķ, ė¤ģķ ė¬“źø°ģ²“ź³ź° DNA(Data, Network, AI(Artificial Intelligence) źø°ģ źø°ė° ģ“ģ°ź²° ė¤ķøģķ¬ė„¼ ķµķ“ ģ źø°ģ ģ¼ė” ģ°ź²°ėģ“ ź°ģģ ģ°°, ģ§ķķµģ ė° ģ ė°ķź²©ģ“ ė¬ģ±ė ģ ģėė” ģė¬“ ģ¤ķ ėģģ ģģė¤ģ“ ģ¬źµ¬ģ± ė ģ ģė ėŖØģģ“ķ¬ģ ź°ė
ģ¼ė” ė³ķķź³ ģė¤.
ėÆøźµģ 2018ė
ė¶ķ° źµź°ė°©ģģ ėµģ ģ 3ģ°Ø ģģģ ėµģ ė°ģķģ¬ ģøź³µģ§ė„, ė”ė“, ė¬“ģøģ²“ź³ ė± ģģØ ģģ¤ķ
ź°ė°ģ ź³ ėķķź³ ģė¤. ź·øģ¤ģģė ė¬“ģø ģ ķ¬źø°ė ķØź³¼ģ ģø ģė¬“ ė° ģģ ģ ģķķźø° ģķ“ ģ“źø°ģ¢
ģ ģ¼ģė”ė¶ķ° ģø”ģ ė ģ ė³“ė„¼ ģµķ©ķģ¬ ģ¤ģź° ģķ© ģøģģ ķµķ“ ģ ģø ģ ķ¬źø° ģ”°ģ¢
ģ¬ģ ģģ¬ź²°ģ ģ ģ§ģķźø° ģķ ź“ė Ø źø°ģ ģ“ ė·ė°ģ¹Ø ėģ“ģ¼ ķė¤. ķ¹ķ, ģ źø°ģ źø°ė ģ ģ ģ ķģ
ķģ¬ ģźµ° ė¬“ģøźø°ģ ģģØ źø°ėģ ź²°ģ ķź³ , ģ“ė„¼ ėØė
ģ¼ė” ģķķ ģ ģė ģøź³µģ§ė„ źø°ė° ģģØ źø°ė ģ°źµ¬ź° ģ ģ¤ķ ģźµ¬ėė¤. ģ ķ¬źø° ģ ģøģ”°ģ¢
ģ¬ė źµģ ģ¤ ė°ģ ź°ė„ķ ėŖØė ź²½ģ°ģ ėķ“ ėģ²ķ ģ ģėė” ģ¶©ė¶ķ ģź°ģ źµģ”ź³¼ ķė Øģ ė°ģ§ė§, ė¬“ģø ģ ķ¬źø°ģ ź²½ģ°ģė ģ¶©ė ė°©ģ§, ģė ė¹ķ ė° ģ“āģ°©ė„ źø°ė„ ė±ģ¼ė” ģ ķģ ģø ė²ģģģ źµ¬ķ ė° ź°ė°ėģ“ ģģ“ ģøź° ģģ¤ģ ģģ ģģØķź¹ģ§ė ė§ģ ģ°źµ¬ź° ķģķ ź²ģ¼ė” ķėØėė¤.
ź·øė źø° ėė¬øģ ėÆøźµ źµė°©ė¶ė ź³µź²©, ģ ģ°°, ģ ģģ ė±ģ ģė¬“ė„¼ ģ āė¬“ģø ķź³µźø°ź° ķģ
ķģ¬ ģķķė ė”ģ ģė§Ø(Loyal Wingman) ź³¼ģ ė„¼ ķµķ“ ģ ģø ģ ķ¬źø°ė„¼ ģėŖØģ±ģ ģ ė¹ģ© UAS(Unmanned Air System)ė” źµģ²“ķź±°ė ģ ź·¹ ķģ©ķģ¬ ķØģØģ ģø ģė¬“ ģķź³¼ ģ ķ¬źø°ģ ģģ”“ģ±ģ ė³“ģ„ķė ė°©ģģ ģ°źµ¬ķź³ ģė¤[6]. ėķ, DARPAė ģ ė¢°ķ ģ ģź³ , ķģ„ ź°ė„ķ ź³µģ¤źµģ ģ ģķķźø° ģķ“ ACE(Air Combat Evolution) ķė”ź·øėØ[7]ģ ķµķ“ ģøź° ģģ¤ģ AI ķģ¼ėæ ź°ė°ģ ģ§ķķź³ ģė¤. ACE ķė”ź·øėØģ ź°ė°ė AI ź³µģ¤źµģ ėŖØėøģ ģ¤ģ ģ ķ¬źø°ģ ķģ¬ķģ¬ ģ ė¢°ģ±ģ ź²ģ¦ķź³ ģ ģø ģ”°ģ¢
ģ¬ģģ ķģ
ź°ė„ģ±ģ ź²ģ¦ķė ź²ģ ėŖ©ķė” ķź³ ģė¤. ź·øė¬ė ė¬“ģøģ ķ¬źø° ģģ¤ķ
ģ ź“ķ ė§ģ ģ°źµ¬ė¤ģ“ ģ§ķėź³ ģģģė ė¶źµ¬ķź³ ģ ķµģ ģø ź³µģ¤ ģ ķ¬ģ źø°ė³øģė¦¬ ė° ģģ¹ģ ķ¬ź² ė³ķź° ģė ģķ©ģ“ė¤. ģµģ ė¬“ģ„ ģ“ģ©ģ“ė ģė¬“ ģ¬ź³ķ, ź²½ė” ģ¬ģ¤ģ ė±ģ ģķ ģģ¬ź²°ģ ģ ģ ģø ģ ķ¬źø° ģ”°ģ¢
ģ¬ģ ėģģ ė°ėė¤ ķėė¼ė, ķØģØģ ģø ė¬“ģøģ ķ¬źø°ģ ģ“ģ©ģ ģķ“ģė źø°ė³øģ ģø ź³µģ¤ ģ ķ¬ ė„ė „ģ ź°ģ§ ģøź³µģ§ė„ źø°ė° ź³µģ¤ źµģ ėŖØėø źø°ģ ģ ź°ģ„ ķµģ¬ģ ģ“ź³ ķģķ ģģė¼ź³ ķ ģ ģė¤.
ģ“ė„¼ ģķ“ ė³ø ė
¼ė¬øģģė ė¬“ģøģ ķ¬źø°ź° Dog-fightģ ź°ģ ģź³ ė“(WVR) ź³µģ¤ģ ģ ģ±ź³µģ ģ¼ė” ģķķ ģ ģėė” ź³µźµ°ģ ģ ģ źµė² ė° ģ”°ģ¢
ģ¬ ź²½ķģ ė°ķģ¼ė” ź³µėź³µ źµģ ģķģ ģķ ģ§ģėŖ
ģøģė„¼ źµ¬ģ¶ķģė¤. ź° ģ ģ ėØģ(ź³µź²©, ė°©ģ“ ė±) ė³ ķģ ź²°ģ ķė”ģøģ¤ė„¼ DBķ ķģź³ , ģ“ė„¼ źø°ė°ģ¼ė” ķøė¦¬ źµ¬ģ”°ė„¼ ķģ©ķģ¬ ģ ķ¬źø° źø°ėģ ź²°ģ ķė ķģ ėŖØėøģ ģ¤ź³ķģė¤. ģ ģ„ ģķ©ģ ė°ė¼ ģ ģøģ”°ģ¢
ģ¬ģ źø°ė ķģė„¼ ź²°ģ ķė ģģ¬ź²°ģ ė°©ģģ ė¹ ėŖ
ģģ ģ“ė©° ģ ėģ ģ¼ė” ģė³ķźø° ģ“ė µźø° ėė¬øģ ģ“ė„¼ ė¬“ģøģ ķ¬źø°ģ ģ ģ©ķźø° ģķ“ Genetic-Fuzzy ģź³ ė¦¬ģ¦[8]ģ ķģ©ķģė¤. Genetic-Fuzzy ģź³ ė¦¬ģ¦ģ ķµķ“ źø°ė ķģ ź²°ģ ģ ķģķ ķ¼ģ§ ė³ģģ ź° ė©¤ė²ķØģė¤ģ źµ¬ź° ź°ģ ķėķģ¬ ģµģ ģ źø°ėģ ź²°ģ ķź³ ģ źø°ģģ ģķģ ģ°ģė„¼ ķėØķėė° ģ¬ģ©ķģė¤.
ģ“ė„¼ ė°ķģ¼ė” ģ¤ź³ė ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģģ¹, ź°ė ė± ģ źø°ģģ źø°ķ ģ ė³“, ģ°ė£ė, ģė ė±ģ ģķ ź°ģ ģ
ė „ģ¼ė” ė°ģ ģ ķ¬ ģķ©ģ ķėØķź³ ģµģ ģ źø°ėķģė„¼ ź²°ģ ķģ¬ ė¹ķ ģ¶ģ ģ ģ ģģ±ķź³ ģ“ė„¼ ģ¶ģ¢
ķė ģ ģ“ ėŖ
ė ¹ ź°ģ ģģ±ķź² ėė¤. ģ ģ“ ėŖ
ė ¹ģ ė°ė¼ ģģ±ė Stick, Throttle, Rudder ė±ģ ģ”°ģ¢
ź°ģ ģ¤ķģģ¤ ģ ķ¬źø° ėģķ ėŖØėøģø JSBSim[9]ģ ģ ģ©ķģ¬ 6-DOF ėģķ źø°ė°ģ ģ ķ¬źø° źø°ėģ źµ¬ķķģė¤.
ģ°ė¦¬ė ģ ģķ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģ±ė„ģ ķź°ķź³ ź²ģ¦ķźø° ģķ“ģ ģøź° ģ”°ģ¢
ģ¬ģ ź·ģ¹źø°ė° AI źµģ ėŖØėø ź°ģ źµģ ģ ģķķė¤. źµģ ģ¤ķģ ģ§ķķźø° ģķ ģė®¬ė ģ“ģ
ķź²½ģ ģøź°ģ”°ģ¢
ģ¬ģ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėø ź°ģ źµģ ģ ė¬¼ė” ģ“ź³ , ģøź°ģ”°ģ¢
ģ¬ģģ ķģ
ėŖØģė„¼ ģ§ģķź³ ģµė 2:2 źµģ ģ“ ź°ė„ķėė” ģ¤ź³ėģė¤. źµģ ģ ģ°øģ¬ķė ź°ģ²“(ģøź°ģ”°ģ¢
ģ¬ ķ¹ģ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėø)ė¤ģ ģ¬ģ ģ¤ģ ģ“ ź°ė„ķė©°, ģ ģ²“ ģė®¬ė ģ“ģ
ķź²½ģ ģøź°ģ”°ģ¢
ģ¬ ķ¹ģ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ“ ģ”°ģ¢
ź°ė„ķ ģė®¬ė ģ“ķ° 2ģ, ģ“ģ© ķµģ ģ, ėŖØģ ģė² ė° FOV(Field Of View) 240Ā°~110Ā°ė„¼ ģ§ģķė ė ģ¤ķ¬ė¦° ė±ģ¼ė” źµ¬ģ±ėģė¤. 2ėŖ
ģ ģøź°ģ”°ģ¢
ģ¬ģ ź·ģ¹źø°ė° AI źµģ ėŖØėø ź° ģ“ 10ė²ģ ź·¼ģ ź³µģ¤źµģ ģ ģķķģź³ ź·ģ¹źø°ė° AI źµģ ėŖØėøģ“ 100 %ģ ģ¹ė„ ģ źø°ė”ķģė¤.
ģøź°ģ”°ģ¢
ģ¬ė„¼ ģėė” ķ ģ±ź³µģ ģø źµģ ź²°ź³¼ ėæė§ ģėė¼, ģ ģė ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøź³¼ ģė®¬ė ģ“ģ
ķź²½ģ źø°ģ”“ ģ ė¬øź° ģģ¤ķ
ģ“ ź°ź³ ģė ģ ė¬øź° ģģ”“ ė¬øģ , ģ ģ© ėģ ė° ķź²½ ė³ķģ ė°ė¼ ė°ģķė ź·ģ¹ ź°±ģ ģ ė²ź±°ė”ģź³¼ ģź°ģ“ ė§ģ“ ģėŖØėė ėØģ ė¤ģ ķ“ź²°ķė¤. ėķ, ź°ķķģµ, ė„ė¬ė ė± źø°ź³ķģµ ģź³ ė¦¬ģ¦ ė°©ģė¤ģ źµģ ģķ©ģģ ģ¼ź“ė ģ±ė„ ė³“ģ„ģ“ ģ“ė µź³ ėøėė°ģ¤ ķķģ ģė ė°©ģģ¼ė” ģģ±ė ź·ģ¹ģ ź²ģ¦ģ“ ė¶ź°ė„ķ ė¬øģ ė„¼ ķģ ķøė¦¬ źµ¬ģ”°ģģ ź²°ģ ė ķģė„¼ źµģ ģ¤ ģ¤ģź°ģ¼ė” ķģøķ ģ ģėė” ģė®¬ė ģ“ģ
ķź²½ģ ģ¤ź³ķģź³ ģ¤ķģ ķµķ“ ģ“ė„¼ ź²ģ¦ķģė¤. ģ“ė¬ķ ź²°ź³¼ė¤ģ ė°ķģ¼ė”, ģ°ė¦¬ė ė³ø ģ°źµ¬ź° ģ ķ¬źø° ģ”°ģ¢
ģ¬ė¤ģź² ģ ģ ė° źµģ ģģ ź³ķģ ģķ ģ ģ ģė®¬ė ģ“ģ
ķź²½ģ ģ ź³µķź³ ģ“ė³“ ģ ķ¬źø° ģ”°ģ¢
ģ¬ė„¼ ģķ źµė² źø°ė°ģ ķė Ø ķź²½ģ ģ ź³µķ ģ ģģ ź²ģ¼ė” ė³øė¤. ź·øė¦¬ź³ ė¤ģķ AI ģź³ ė¦¬ģ¦ źø°ė°ģ ź³µģ¤źµģ ėŖØėø ė° UAS ķģ¬ ģģØķ ģė¬“ź“ė¦¬ ģķķøģØģ“ ź°ė°ģ ģķ źø°ģ“ź° ė ź²ģ¼ė” źø°ėķė¤.
ė³ø ė
¼ė¬øģ źµ¬ģ±ģ ė¤ģź³¼ ź°ė¤. 2ģ„ģģė ź³µģ¤źµģ ėŖØģė„¼ ģķ ź“ė Ø ģ°źµ¬ė¤ģ ė¶ģķė¤. ģ“ķ 3ģ„ģ ķµķ“ ģ ģķ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėø ģ¤ź³ ė“ģ©ģ źø°ģ ķź³ ģ“ė„¼ ģ ģ©ķź³ ź²ģ¦ķźø° ģķ ģė®¬ė ģ“ģ
ķź²½ģ 4ģ„ģģ ģ¤ėŖ
ķė¤. 5ģ„ģģė ģ ģė ėŖØėøģ ģ¤ķ ė° ź²ģ¦ ź²°ź³¼ė¤ģ ė¶ģķź³ 6ģ„ ź²°ė” ģģ ź°ģ ģ ź³¼ ķ„ķ ģ°źµ¬ ė°©ķ„ģ źø°ģ ķė¤.
2. ź“ė Ø ģ°źµ¬
ģ ķ¬źø° ź³µģ¤źµģ ėŖØģ ėŖØėøģ ģķ źø°ģ”“ģ ģ ķµģ ģø ģ ź·¼ė²ģ ģ ģø ģ ķ¬źø° ģ”°ģ¢
ģ¬ģ ķėģ ėŖØė°©ķźø° ģķ“ ģ ė¬øź°ģ ģķ ź·ģ¹ źø°ė° ģģ¤ķ
ģ ź°ė°ķź±°ė ķ“ė¦¬ģ¤ķ± ģ ė³“ źø°ė° ģģ¤ķ
, ė¶ė„ģ ė°©ģ(Classifier System)ģ ģ ģ ģ ģź³ ė¦¬ģ¦ źø°ė° ź°ķķģµ źø°ė² ė° źø°ź³ķģµ ģź³ ė¦¬ģ¦ģ ģ ģ©ķ ģ°źµ¬ė¤ģ“ ģė¤.
Burgin et al.ģ ģ°źµ¬[10,11]ė ź° źµģ ģķ©ģ ėķ ė¤ģķ ź·ģ¹ģ ģģ±ķź³ ģ“ė„¼ źø°ė°ģ¼ė” ź³µģ¤ ėŖØģ ģė®¬ė ģ“ģ
ģ źµ¬ģ±ķģė¤. ź·øė¬ė ģ“ė¬ķ ź·ģ¹ źø°ė° ģģ¤ķ
ģ ź°ģ„ ķģ¤ģ ģø źµģ ģė®¬ė ģ“ģ
ź²°ź³¼ė„¼ ė³“ģģ§ė§ źµģ ģķ© ģ ė°ģ ėķ ź·ģ¹ģ“ ķģķź² ėėÆė” ėŖØė ģķ©ģ ėķ ģøė¶ģ ģø ź·ģ¹ģ ėÆøė¦¬ ģ¤ģ ķ“ģ¼ ķė ė²ź±°ė”ģģ“ ģģ¼ė©° ėģ ģ ķ¬źø°ģ ė°ė¼ ź·ģ¹ ź°±ģ ģ ģź°ģ“ ė§ģ“ ģėŖØėė ėØģ ģ“ ģė¤. Kahneman et al.ģ ģ°źµ¬[12]ģģė ėÆøė źø°ė ģ¤ ź°ģ„ ėģ źø°ė ģ ģė„¼ ź°ė źø°ėģ ź²°ģ ķź³ ģ ķķė ė°©ģģ ģ ģ©ķģė¤. ģ“ė„¼ ķµķ“, źµģ ģė®¬ė ģ“ģ
ź²°ź³¼ė ģ¼ė¶ ź°ģ ėģģ¼ė ģģ ģøźøķ ģ ė¬øź° ģģ¤ķ
ģ ėØģ ģ ķ“ź²°ķģ§ė ėŖ»ķė¤.
ķ“ė¦¬ģ¤ķ± ģ ė³“ źø°ė° ģģ¤ķ
[13]ģ ģ ė³“ģ§ķ„(Information oriented) ģė®¬ė ģ“ģ
ģķ¤ķ
ģ³ė„¼ ź·¼ź°ģ¼ė” ģė®¬ė ģ“ģ
ģ ģķķė¤. ģ¼ģ, ģź° ė° ķµģ ė±ģ ķ¹ģ ķ ź°ģ“ ėŖ
ģė ģ ė³“ ķė ģ“ė²¤ķøė„¼ ķµķ“ ģė®¬ė ģ“ģ
ģ“ ģķėė¤. ģ¬źø°ģģ ź° ģ”°ģ¢
ģ¬ė ė°°ģ“ ķģ
ģ ė©ķ ėŖØėø(Mental Models)ģ ź°ģ§ź³ ģėė°, ģ“ź²ģ ėė(Surprise), ķ¼ė(Confusion) ė± ģķ©ģ ģ§ź°ķė ķ¹ģ ź°ģ ģ”°ģ¢
ģ¬ź° ź°ģ§ ģ ė³“ė§ģ¼ė” ģķ© ķź°(Situation Assessment)ź° ģ“ė£Øģ“ģ§ė¤. ģ“ė ė¤ė„ø ģė®¬ė ģ“ģ
ź°ģ²“ė¤ģ ź·øė¤ģ ķėģ ź³ģķė¤ė ź°ģ ķģ ķ“ė¦¬ģ¤ķ± ķØģė„¼ ķµķ“ ėŖ©ķė¬ģ±ģ ģø”ģ ķź³ ķėØ źø°ģ¤ź°ģ ė°ė¼ ķź³µźø°ģ źø°ėź³¼ ė¬“ģ„ģ ģ“ģ©ķė¤. ģ“ ė°©ģģ ģ”°ģ¢
ģ¬ģ ź²½ķģ ė°ķģ¼ė” ķźø°ģ ź²°ź³¼ ź°ģ ėķ ģ ė¢°ģ±ģ ź°ģ§ė§ ģķ©ķėØģ ģ”°ģ¢
ģ¬ ź°ģģ ė§ģ(Mind)ģ ė°ė„ø ķ¹ģ ź°ģ źø°ģ¤ģ¼ė” ķė ėØģ ģ“ ģė¤.
Holland et al.ģ ė
¼ė¬ø[14]ģģė źø°ģ”“ ź·ģ¹ źø°ė° ģģ¤ķ
ģ źµ¬ģ¶ķė ģģģź°ģ ėØģ¶ķź³ źµģ ģķ© ģ ģ²“ģ ėķ ģµģ ķ“ė„¼ ź²°ģ ķźø° ģķ“ ė¶ė„ģ ė°©ģģ ģ ģ ģ ģź³ ė¦¬ģ¦ źø°ė° ź°ķķģµ ė°©ė²ģ ģ¬ģ©ķģė¤. ģ“ ģ°źµ¬ė ģ¶ė „ ķøķ„ ģ ģ“ź° ź°ė„ķ ģ ķ¬źø°ģ ģ ģ źø°ėģ ģ¬ė¬ ģķ©ģ ėķ ķė Øģ ķµķ“ ź·ģ¹ģ ģģ±ķėė” ķė ė°©ģģ ģ“ģ©ķė¤. ģ“ė„¼ ģķ“ģ ź° źµģ ģķė„¼ ė°ģ“ėė¦¬ ķķė” ė¶ė„ķź³ ģø”ė©“ź° ź°ģ ėŖ©ģ ķØģė” ģ¤ģ ķ“ ź°ķķģµģ ģķķģė¤. ź°ķķģµ[15] źø°ė²ģ ģ ģ©ķė©“ ė¤ģķ ģ ķ¬źø° ėŖØėøģ“ė ģ”°ģ¢
ģ¬ź° ģ ģ“ķźø° ģ“ė ¤ģ“ ė¹ķ ģģź¹ģ§ ģ ģ źø°ėģ ģė®¬ė ģ“ģ
ķź³ ź·ģ¹ģ ģģ±ķ“ ė¼ ģ ģė ģ„ģ ģ“ ģė¤. ķģ§ė§ ģģ±ė ź·ģ¹ģ ź²ģ¦ģ“ ė¶ź°ė„ķź³ źµģ ģķ©ģģ źø°ėėė ģ¼ź“ė ģ±ė„ ė³“ģ„ģ“ ģ“ė µė¤ė ė¬øģ ź° ģė¤.
Genetic-fuzzy ģź³ ė¦¬ģ¦ģ ė¤ė„ø źø°ź³ķģµ ė°©ģė¤ģ ė¹ķ“ ėģ ź³ģ° ķØģØģ±ģ ź°ģ§ ėæė§ ģėė¼ ė¶ķģ¤ķź³ ė¬“ģģģ±ģ ź°ķ ķ¹ģ§ģ ź°ź³ ģė¤. ź·øė źø° ėė¬øģ ėģ ģ¼ė” ė³ķķė ģėė¦¬ģ¤ģ ģ ģķ ģ ģź³ ģ¤ģ ģ ė°ė„ø ģ§ź“ģ ģø ģė ė°©ģģ¼ė” ź³¼ģ ź³¼ ź²°ź³¼ģ ėķ ź²ģ¦ģ“ ź°ė„ķźø° ėė¬øģ ģ ģ“ ė¬øģ ģ ėė¦¬ ģ¬ģ©ėź³ ģė¤[16~18]. ė¬“ģø ģ ķ¬ķź³µźø°(UCAV) ģė¬“ė„¼ ģė®¬ė ģ“ģ
ķźø° ģķ“ Ernest et al.ģ ģ°źµ¬[19]ģģė Genetic Fuzzy Tree(GFT)ė„¼ ķģ©ķ ėŖØėøģ ģ ģķė¤. ģ ķ¬ģ”°ģ¢
ģ¬ģ ź°ģ ģ ė¬øź°ź° ģ¬ģ ģ ģķ ģ
ė „ź°ģ“ ģ¬ė¬ ź°ģ ķ¼ģ§ ģ¶ė” ķØģė” źµ¬ģ±ė ķøė¦¬ źµ¬ģ”°ģ ģ ģ©ėģ“ ģė¬“źø ģ ķ¬ ģķ©ģģ ģµģ ģģ¬ź²°ģ ģ ģ§ģķė źµ¬ģ”°ė„¼ ź°ź³ ģė¤. ė¬“ģø ģ ķ¬ķź³µźø°ģ ģė¬“ ģķģ ėŖ©ģ ģ¼ė” ģ ģ ėØģ ź³µź²©, ģ¹Øķ¬, ķķ¼ ė±ģ źø°ėģ ģ ģ“ķźø° ģķ“ 0ģģ 100ģ¬ģ“ģ ķė„ ź°ģ ģ¶ė „ķė ė°©ģģ ģ ģ©ķė¤. ė³µģ”ėź° ėź³ ėģ ģø źµģ ģķ©ģ ķØź³¼ģ ģ¼ė” ėŖØģķźø° ģķ ķ©ė¦¬ģ ģø ģ ź·¼ ė°©ė²ģ ģ ģķģ§ė§, ģė¬“źø źµģ ėŖØģė„¼ ėģģ¼ė” ķźø° ėė¬øģ ź·¼ģ ź³µģ¤źµģ ģ ģ ģ©ķźø°ģė ė¬“ė¦¬ź° ģė¤.
3. ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėø
ģ ķ¬źø° ģ”°ģ¢
ģ¬ģ ģ¬ģ ģ§ģģ“ ź³µģ¤źµģ ģ ģķ ģ ģ ķė Øģ źø°ģ¤ģ“ ėė źø°ģ”“ ķź²½ģģ ģ”°ģ¢
ģ¬ģ ģøģź³¼ ķėģ ėģ¼ķź² ėŖØģķ ģ ģė¤ė©“ ģ ķ¬źø°ė, ė¹ķģ ģ“ ė± ė ėģ ģģ¬ź²°ģ ėģ¶ģ“ ź°ė„ķ ź²ģ“ė¤. ź·øģ¤ģģė WVR ź·¼ģ ź³µģ¤źµģ ģ ėŖØģķźø° ģķ“ģė ź³µź²©, ė°©ģ“, ģ¤ė¦½ ģķ©ģģ źø°ėģ ź²°ģ ķźø° ģķ źø°ė³øģ ķ¬źø°ė(BFM, Basic Fighter Maneuvers)ģ ėķ ź³¼ģ
/ķģ ėŖØėøģ źµ¬ģ¶ķź³ ģ ķ¬źø° ģ”°ģ¢
ģ¬ė”ė¶ķ° ģ¬ģ ģ ģė³ė WVR ź·¼ģ ź³µģ¤źµģ ģ§ģģ ė°ķģ¼ė” ķ AI ģ”°ģ¢
ģ¬ ėŖØėøģ“ ź°ė°ėģ“ģ¼ ķė¤. ģ“ė„¼ ģķ“ ė³ø ģ„ģģ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėø ģķ¤ķ
ģ³ģ ģ“ė„¼ źµ¬ģ±ķė ģ§ģėŖ
ģø ķģķøė¦¬, ģ ģ ķģ ėŖØėø, ķģ ź²°ģ ģ ģķ ź·ģ¹źø°ė° ģģ¬ź²°ģ ėŖØėź³¼ 6-DOF ėģķ ė° ģ ķ¬źø° ė¹ķģ ģ“ė„¼ ģķ ģ”°ģ¢
ģ ģ“ ėŖØėøģ ėķ“ źø°ģ ķė¤.
3.1 ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėø ģķ¤ķ ģ²
WVR ź³µģ¤ģ źµģ ź·ģ¹ ė° ģ ģ ė±ģ ģ ķ¬źø° ģ±ė„ģ ė§ź² źµė²ģ“ė źµģ ź·ģ¹ ė±ģ¼ė” źø°ģ ėģ“ ģģ¼ė©° ģøė¶ ź³¼ģ
ģ ģ°Øė ģ”°ģ¢
ģ¬ ź°ģøģ ģķ© ķėØģ ė°ė¼ ģ§ķėź³ ģė¤. ģ“ģ ė³ø ģ°źµ¬ģģė ź³µėź³µ źµģ ź·ģ¹, ģ ģ źµė²ź³¼ źø° źµ¬ģ¶ė ź°ģź³µģ¤źµģ ėŖØėø[1] ė° ź°ė³ķ ģ ģ ģė®¬ė ģ“ķ°[2]ģ źµģ ė°ģ“ķ°ė„¼ ķģ©ķģ¬ źø°ė³øģ ķ¬źø°ė(BFM)ģ 1ė1 ź³µź²© ė° ė°©ģ“ źµģ ź·ģ¹ ė° ģ ģ ģ ķģ¤ķķģ¬ ėŖØėøė§ģ ģķķė¤. ģ“ė„¼ ė°ķģ¼ė”, źµģ ź·ģ¹ źø°ė° AIģ”°ģ¢
ģ¬ źµģ /ź³¼ģ
ģķ ėŖØėøģ ź°ė°ķź³ , ė¤ėė¤ źø°ģ¢
ė³ ėģ ģ ģ ģ ķģ¤ķķģ¬ 1ė2, 2ė1 ė° 2ė2 źµģ ėŖØģź° ź°ė„ķėė” ķė¤. źµ¬ģ¶ė ź³µėź³µ źµģ ź·ģ¹ź³¼ ź³¼ģ
ģķ ėŖØėøģ ģķ ģ§ģėŖ
ģøė ģ ė¬øź°(ģ ķ¬źø° ģ”°ģ¢
ģ¬) ģė¬øź³¼ ė³ėģ ź²ģ¦ź³¼ģ [3]ģ ķµķ“ ģ ķØģ±ź³¼ ģ ė¢°ģ±ģ ķė³“ķė¤.
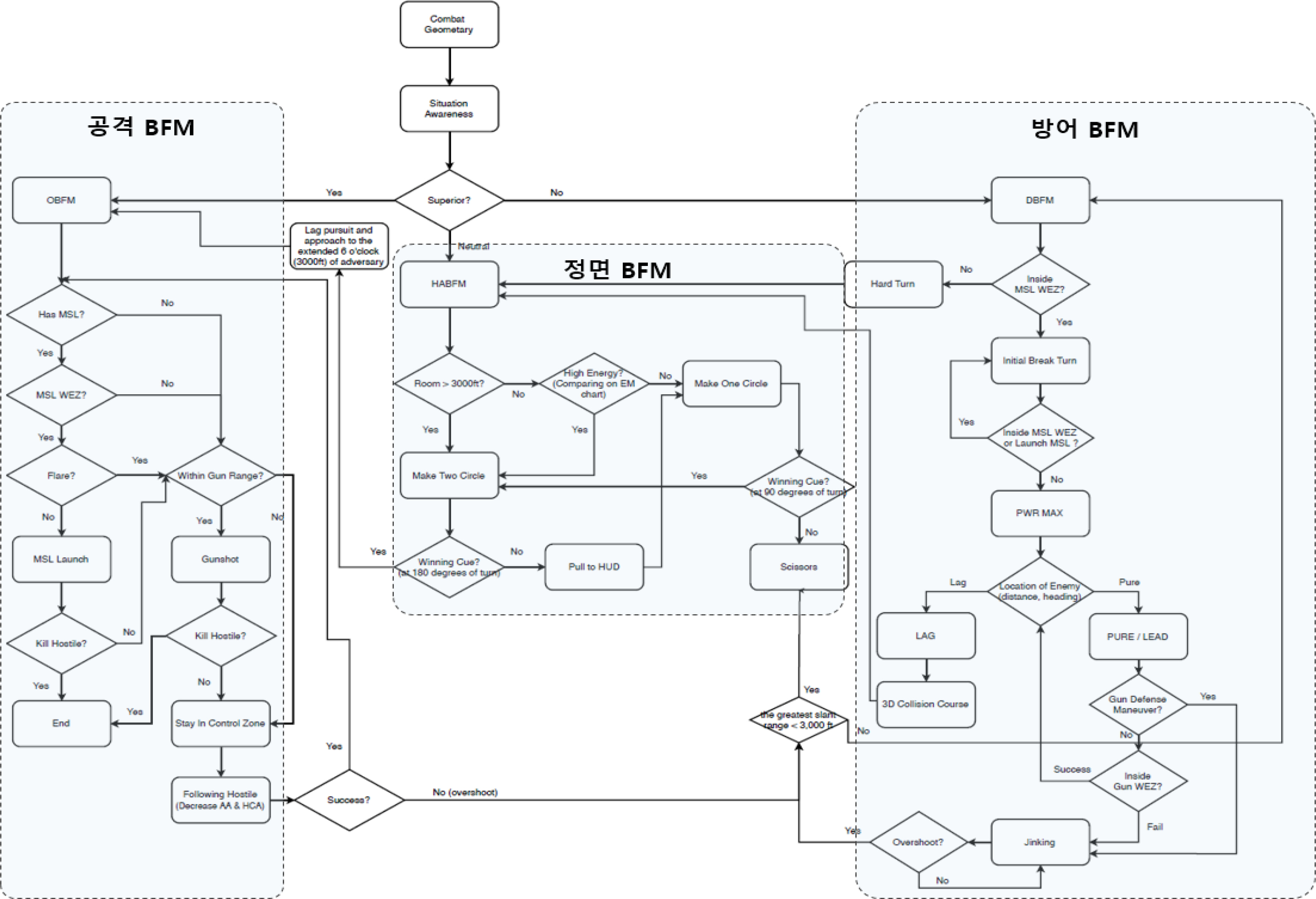
ė³ø ģ°źµ¬ģģ ģ ģķė ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģķ¤ķ
ģ²ė Fig. 1ź³¼ ź°ė¤. ģ ģė ėŖØėøģ ķ¬ź² ģ ķ¬ ģķ©ź³¼ ķģė„¼ ķėØķźø° ģķ“ ģ
ė „ ź°ė¤ģ ģ²ė¦¬ķė ģķ©ģøģ ėŖØė, ģ ķ¬ ģ¤ ģ ė¦¬ķ ģķ©ģ ģ ģ ķźø° ģķ ķģ ėŖØėø, ķģėŖØėøģģ ź²°ģ ė źø°ėģ ģķķźø° ģķ“ ģ ķ¬źø°ė„¼ ģ ģ“ķė ģ”°ģ¢
ģ ģ“ėŖØėøė” źµ¬ģ±ėė¤.

ģķ©ģøģ ėŖØėģ ģ ķ¬źø° ķģ¬ ģ¼ģģ ģ źø°ģģ źø°ķģ ė³“ ė±ģ ė°ķģ¼ė” ģ ķ¬źø° ķģģ źø°ėģ ķėØķźø° ģķ ģ ė³“ė„¼ ė“ė¹ķė¤. ģ ķ¬źø°ķķģģė ģźµ°źø°ģ ģ źø° ź°ģ ģėģ ź±°ė¦¬, Aspect Angle, Heading Cross Angle, Antenna Train Angleź³¼ ź°ģ 4ź°ģ§ ģģė¤ģ ģķ“ ģ“ė ģ ķ¬źø°ź° ģ°ģė„¼ ź°ģ§ėģ§ ķģ
ķ ģ ģė¤. ģ“ė„¼ ė°ķģ¼ė” ģ°ė¦¬ė ģ ķ¬ ģ“źø° ģ”°ź±“ ėæė§ ģėė¼ ģ ķ¬ ģ§ķ ģķ©ģģ ė§¤ ģź° ģźµ°źø°ź° ģ źø°ģ ėķ“ ģ°ģø, ģ“ģø ķ¹ģ ėė±ķģ§ė„¼ ķėØķė źø°ė„ģ¼ė” ķģ„ķģė¤.
ģ źø°ģ ģźµ°źø°ģ ģģ¹ ź“ź³ė„¼ ķµķ“ ģźµ°źø°ź° ķģ¬ ģ¤ė¦½/ź³µź²©/ė°©ģ“ ģ¤ ģ“ė¤ ģķ©ģøģ§ė„¼ ģė ¤ģ£¼źø° ģķ“ģ ė ģ“ė, GPS/INS ė± ģ ķ¬źø° ķģ¬ ģ¼ģė”ė¶ķ° ģø”ģ ėė ė°ģ“ķ°ė„¼ ź°ź³µķģ¬ ģ źø°ģģ ź±°ė¦¬, ź°ė, ģė ė° ģėģģ¹ ė±ģ ķ¹ģ§ ė°ģ“ķ°ė„¼ ģ¶ģ¶ķź³ ėØģ ģ°ė£ė, ģėģ§ ė±ģ ģ ė³“ģ ź²°ķ©ķ“ ģµģ ģ źø°ėģ ģ ķķźø° ģķ ķėØ ģ ė³“ė„¼ ģ ź³µķė¤. ģ ķķ ģķ©ģøģģ ģ źø°ģ ģźµ°źø°ģ ź°ėė§ģ ģ“ģ©ķ ģė ģź³ , ź°ėģ ź±°ė¦¬ ķ¹ģ ź°ė, ź±°ė¦¬, ź³ ė, ģėė„¼ ģ¢
ķ©ķ“ģ ź³ ė ¤ķ ģė ģė¤. ė³ø ģ°źµ¬ģģ ģķ©ģøģģ ģźµ°źø°ģ ź“ģ ģģ ģ źø°ģź² ģ°ģøķ ģķ©ģø OBFM(Offensive Basic Fighter Maneuvers), ė¶ė¦¬ķ ģķ© DBFM(Defensive Basic Fighter Maneuvers), ėė±ķ ģķ© HABFM(High-Aspect Basic Fighter Maneuvers)ģ¼ė” źµ¬ė¶ķė¤.
OBFMģ ģ źø°ė„¼ ģ¶ź²©ķė ģķ©ģ¼ė” ėÆøģ¬ģ¼ ģ ė¬“, WEZ(Weapon Engage Zone) ģ§ģ
ģ¬ė¶, źø°ģźµģ°Øź° ė±ģ ģ źø°ģģ ģėģ ė³“ ė±ģ ė°ķģ¼ė” źø°ėģ ģ ķķė¤. DBFMģ ģ¶ģ ė¹ķė ģķ©ģģ ģķķė ģ ģ ė”, ģ źø°ģ ģ¶ģ ģķģ ķź²½ģ ė³“ė„¼ ė°ķģ¼ė” ģ ė¦¬ķ ģ§ģ ģ ķė³“ķźø° ģķ źø°ėģ ģ ķķė¤. HABFMģ ģø”ė©“ź°ģ“ ėź±°ė ėė±ķ ģķ©ģģģ ģ ģ ė”, ģ źø°ģ ėģģ ģģ¹ ģ ė³“ė„¼ ė°ķģ¼ė” One Circle ķ¹ģ Two Circleģ ė§ė¤ė©“ģ ģ ė¦¬ķ ģģ¹ė„¼ ģ ģ ķźø° ģķ źø°ėģ ģķķė¤. ģ ģ ķģ ė³ė” BFM ź³µė źø°ė 12ģ¢
, OBFM ģ ģ© źø°ė 5ģ¢
, DBFM ģ ģ© źø°ė 2ģ¢
, HABFM ģ ģ© źø°ė 3ģ¢
ė± ģ“ 22ģ¢
ė„ģ ģ ķ¬ źø°ėģ ģė³ķź³ ģ“ė„¼ ė°ķģ¼ė” ģ ķ¬źø°ģ ķģ ėŖØėøė§ģ ģ§ķķģė¤.
3.2 ģ ģ ėØģ ķģ ėŖØėø
ģķ©ģøģ ėŖØėģģ ģ ė¬ė ķģ ķėØ ģ ė³“ė ģ ģ ėØģ ķģ ėŖØėøė” ģ ė¬ėģ“ ģµģ ģ ģ ķ¬źø°ėģ ź²°ģ ķź² ėė¤. ģ“ė„¼ ģķ“ ėؼģ ģ ģ źµė² ė° ģ”°ģ¢
ģ¬ ź²½ķģ ė°ķģ¼ė” ģ§ģėŖ
ģøģė„¼ źµ¬ģ¶ķė¤. ģģ ģøźøķ 3ź°ģ§ ģķ©ģøģģ ź°ė
ė¤ź³¼ ķ“ė¹ ģźµ°źø°ģ ģ źø°ģ ź“ź³ ė° źø°ė ģķģ ģ°Øė„¼ ģ ģķė¤. ģķ© ė³ ģ ķ¬źø°ė ģ ģ°Øģ ķėØź·¼ź±° ė±ģ ģė³ķź³ ģ źø°ģ źø°ėģ ė°ė¼ ģźµ°źø°ģ ėģ ģ ģ°Ø ėķ ķ¬ķØķź³ ģė¤. 1ė1, 1ė2, 2ė1, 2ė2 ģķ©ė³ źµģ ģķ© ģ¤ ģ ģ źµė²ģ ģė ģźµ°źø°ź° ģģ ģ“ģøģ“ź±°ė 2ė2ģø ģķ©ģ ėķ ģ§ģėŖ
ģøė ģ”°ģ¢
ģ¬ģ ģź²¬ģ ė°ķģ¼ė” ģģ±ķģė¤.
źµ¬ģ¶ė ģ§ģėŖ
ģøģė Fig. 2ģ ź°ģ“ ķøė¦¬ źµ¬ģ”°ė„¼ ķģ©ķģ¬ ģ ģ ķģ ė³ ģ ķ¬źø° źø°ėģ ź²°ģ ķźø° ģķ ķģ ėŖØėøė§ģ ģķķė¤. ķģėŖØėøģ ķģķøė¦¬(Behavior Tree) źµ¬ģ”°ė„¼ ķģ©ķģ¬ ģķ©ģøģ ėŖØėė”ė¶ķ° ģ ė¬ė ģ ė³“ė”ė¶ķ° ģ“ė¤ źø°ėģ ģ ķķ“ģ¼ ģ źø°ė³“ė¤ ģ ė¦¬ķ ģķ©ģ ģ ģ ķ ģ ģėģ§ ķģķøė¦¬ģ źø°ė°ķ źø°ė ź³ķģ ź²°ģ ķė¤. ģ ģ ėØģ ķģķøė¦¬ė„¼ Fig. 3ź³¼ ź°ģ“ ķģ ķė¦ėė” ė³ķķ ķ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ“ ģµģ ģ ģ ģ ķģė„¼ ėģ¶ķėė° ķģ©ķģė¤.

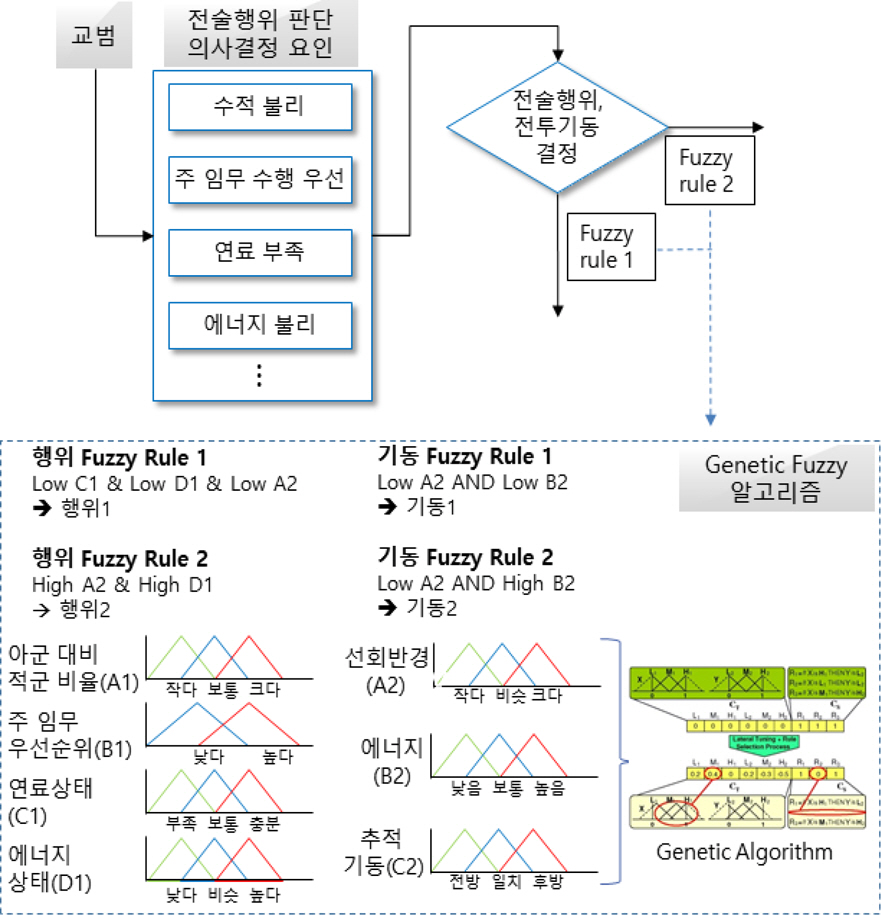
ź·øė¼ģė ė¶źµ¬ķź³ ģøź° ģ”°ģ¢
ģ¬ė„¼ ģķ ģ ģ ķė Ø źµė²ģ ģķ©ģ ķėØķźø° ģķ ģģź° ģ¶ģģ ģ“ź³ ķķģ“ ėŖØķøķźø° ėė¬øģ ģ źø°ģģ ģķģģ ģ ė¦¬ķØ(Superior)ģ ģ ėģ ģ¼ė” ķėØķźø° ģķ“ Fig. 4ģģ ķķė ź²ģ²ė¼ Genetic-Fuzzy źø°ė°ģ ģµģ ź·ģ¹ ė° źµ¬ź° ź°ģ ėģ¶ķ ģ ģėė” ģ ģ©ķģė¤. ģ ė¦¬ķØģ ķėØķźø° ģķ“ģ ė³ø ģ°źµ¬ģģė ģģ ė¶ė¦¬, ģ£¼ ģė¬“ ģķ ģ°ģ , ģ°ė£ ė¶ģ”±, ģėģ§ ė¶ė¦¬ ė±ģ ģģ¬ź²°ģ ģģė¤ģ ģ ģ©ķė¤. ė¹ ėŖ
ģģ ģ“ź³ ģė³ģ“ ģ“ė ¤ģ“ ź·ģ¹ģ ģė³ķģ¬ ģ ķ¬źø° ģ ģ ķģģ ģ ķ¬źø°ė ź²°ģ ģ ķģķ ķ¼ģ§ė³ģ ė©¤ė²ķØģė¤ģ źµ¬ź° ź°ģ ķėķģ¬ ģµģ ģ źø°ėģ ź²°ģ ķ ģ ģėė” ģ¤ź³ķģė¤. ģ ėģ ģ¼ė” ķėØķźø° ėŖØķøķ ģģė¤ģ Fuzzy ė³ģė” ģė³ķź³ ź·ø ģµģ ź°ģ Genetic ģź³ ė¦¬ģ¦ģ ģ“ģ©ķģ¬ Fuzzy ė©¤ė² ė³ģģ ķė„ ė¶ķ¬ė„¼ ķėķėė°, ģźµ° ėė¹ ģ źµ° ė¹ģØ, ģ£¼ ģė¬“ģ ģ°ģ ģģ, ģ°ė£ģķ ė±ģ ģģ¬ź²°ģ ģģė¤ģ ķ¼ģ§ ė³ģė” ģ¤ģ ķź³ ģ“ė„¼ ė°ķģ¼ė” ģ ģ ķģė„¼ ź²°ģ ķźø° ģķ Genetic-Fuzzy źø°ė°ģ ķ¼ģ§ ź·ģ¹ģ ģ¤ģ ķė¤. ķ¼ģ§ ź·ģ¹ģ ģķ“ ģ ģ ķģź° ź²°ģ ėė©“ ģµģ ģ ģ ķ¬ źø°ėģ ź²°ģ ķźø° ģķ Fuzzy ė©¤ė² ķØģė¤ģ źµ¬ź° ź° ģģ Genetic-Fuzzy źø°ė°ģ ķ¼ģ§ ź·ģ¹ģ ģ ģ©ķģė¤. ģ“ģ²ė¼ ķėė źµ¬ź° ź°ģ ģķ“ ź²°ģ ė źø°ėģ ģ”°ģ¢
ģ ģ“ ėŖØėøė” ģ ė¬ėģ“ ģ ķ¬źø° ģ”°ģ¢
ģ ģķ ģ¶ģ ģ ģģ±ģ ķģ©ėė¤.
3.3 ģ”°ģ¢ ģ ģ“ ėŖØėø
ķģ ėŖØėøģģ ź²°ģ ė ģ ģ źø°ėģ ģ”°ģ¢
ģ ģ“ ėŖØėøģ ķµķ“ ģ ķ¬źø° ģ ģ“ź° ģķėė¤. Fig. 5ģģ źø°ģ ķ ģ”°ģ¢
ģ ģ“ ėŖØėøģ ģėģ§ ź“ė¦¬, ģ ķ ė°ź²½ź³¼ ģ¤ģ¬ģ , ķź³µźø° źø°ė ķ¹ģ± ė±ģ ģ“ģ©ķģ¬ ģ ķ¬źø°ģ źø°ė ģģ¹ė„¼ ź²°ģ ķė ģ¶ģ ģ ģ ģģ±ķė¤. 3ģ°Øģ ģ¢ķė” ģģ±ė ģ¶ģ ģ ģ ģ¶ģ¢
ķźø° ģķ ģ¤ķ±(Stick), ģ¤ė”ķ(Throttle), ė¬ė(Rudder) ģ”°ģ¢
ėŖ
ė ¹ ź°ģ¼ė” ģ ķ¬źø°ė„¼ ģ ģ“ķźø° ģķ“ ė³ø ģ°źµ¬ģģė ģ¤ķģģ¤ ėģķ ėŖØėøģø JSBSim ėŖØėøģ ķģ©ķģė¤. JSBSimģ 6-DOF ėģķ ėŖØėøź³¼ ė¤ģķ ģ ķ¬źø°ģ ė¹ķģ ģ“/ģ¶ģ§ ėŖØėøė¤ģ ģ§ģķė¤.
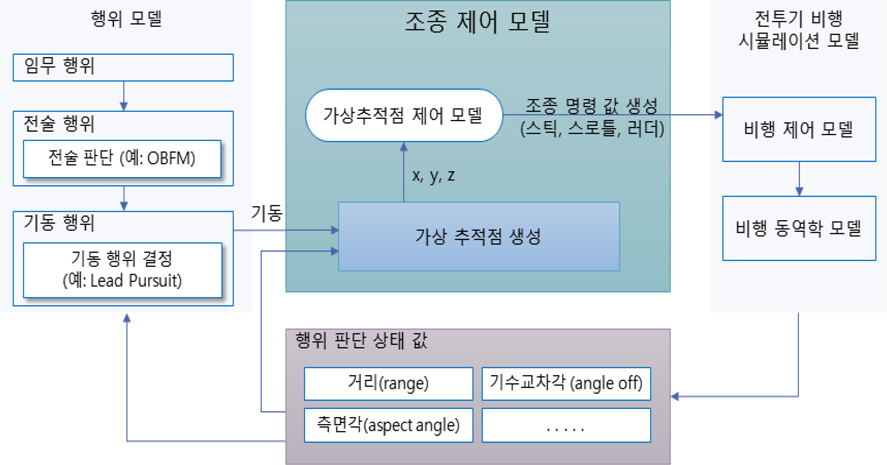
ķ¹ķ, AI ģ”°ģ¢
ģ¬ ėŖØėøģģ ė¹ķģ ģ“ė„¼ ģķ ė¤ģķ ģ ź·¼ģ“ ģģ“ģģ§ė§, ė³ø ė
¼ė¬øģģė ģµģ źø°ėģ ź²°ģ ķź³ ģ¶ģ ģ ģ ģ¶ģ¢
ķė ė¹ķ ģ”°ģ¢
ė°©ģģ ģ ģ©ķģė¤. ģźµ°źø°/ģ źø°ģ ģģ¹, ė°©ķ„ ė° ķź²½ ģ ė³“ ė±ģ ķ¬ķØķė ģķ ź° Sė„¼ ģ
ė „ģ¼ė” ė°ģ ģ ķ¬źø°ė„¼ ģ ģ“ķė ź³¼ģ ģ ķ¬ź² ķėØ(Decision), ģ ė(Guidance), ģ ģ“(Control) ģø ėØź³ė” źµ¬ė¶ėė¤. ķėØ ėØź³ė ģģ źø°ģ ķėė” ķģ¬ ģķė„¼ ė°ķģ¼ė” ģ“ė¤ źø°ėģ ģ ķķ“ģ¼ ģ ė¦¬ķģ§ė„¼ ź²°ģ ķģ¬ ė¹ķ ģ¶ģ ģ ģ ģģ±ķė¤. ģ ė ėØź³ė ķ“ė¹ ģ¶ģ ģ ģ¼ė” źø°ģ²“ė„¼ ģģ§ģ“źø° ģķ ģ¤ķ±, ģ¤ė”ķ, ė¬ė ė±ģ ģ”°ģ¢
ź°ģ ģģ±ķė¤. ė§ģ§ė§ ģ ģ“ ėØź³ė ģ”°ģ¢
ź°ģ ģ“ģ©ķģ¬ ģ ķ¬źø°ģ ė¹ķģ ģ“ė„¼ ė“ė¹ķź³ ģķė„¼ ģ
ė°ģ“ķø ķė¤.
źø°ģ”“ģ Min-max tree search, RL(Reinforcement Learning), GFT źø°ė° heuristic, Fuzzy rule ė± źø°ė²[20~24]ģ ģ ģ©ķ AI ģ”°ģ¢
ģ¬ ėŖØėøė¤ģ ģ¶ģ ģ ė° ģ”°ģ¢
ź° ģģ± ź³¼ģ ģģ“ ģ źø°ģ ģģ§ģė§ģ ģ¶ģ¢
ķźø° ėė¬øģ ģ“ė„¼ ģķ“ ģ¶ė „ėė ģ¶ģ§, ģ ģ“ ėŖ
ė ¹ ź°ė¤ģ ģ ė¢°ģ±ģ ė³“ģ„ķ ģ ģė¤. ėķ, ģ¤ģ ģ ķ¬źø° źø°ė ģķģ ė°ģķ ģ ģź³ ģ ģ©ķė ė¬¼ė¦¬ ģģ§ģ ė°ė¼ ģ ķ¬ ź²°ź³¼ź° ė¬ė¼ģ§ ģė ģė¤. ė°ė©“, ģ ģķ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ źø°ģ”“ ėŖØėøė¤ ėė¹ ģø ėØź³ģ ź±øģ¹ ė¹ķ ģ”°ģ¢
źµ¬ģ”°ė” ģ¤ź³ėģ“ ģģ¤ķ
ģ ė³µģ”ėė ė¤ģ ģ¦ź°ķģ§ė§, ėģķź³¼ ė¬¼ė¦¬ ė²ģ¹ģ źø°ė°ķ ģ¤ģ ģ ķ¬ źø°ėģ ėķ ź²ģ¦ģ“ ź°ė„ķź³ ķ¹ģ źø°ė ė³ė” ķģķ ģ”°ģ¢
ėŖ
ė ¹ź°ģ ķģøķ ģ ģźø° ėė¬øģ ėģ ģ¶©ģ¤ėė„¼ ė°ķģ¼ė” ģ“ė³“ ģ”°ģ¢
ģ¬ ķė Øģ ģķ“ģė ķģ©ķ ģ ģė¤. ėķ, ģø ėØź³ģ ź±øģ¹ ģ ģ“ źµ¬ģ”°ė ANN(Artificial Neural Network)[4], Naive Bayesian ėŖØėø[25]ģ ķģ©ķģ¬ ģ¶ģ ģ ģ ź²°ģ ķė ė°©ģģ ģ ģ©ķ ģ°źµ¬ė¤ģģė ģ ģ©ėģ§ė§, ė³ø ģ°źµ¬ė Genetic Fuzzy ģź³ ė¦¬ģ¦ģ ķģ©ķģ¬ ģķė„¼ ķėØķźø° ėė¬øģ ź³ģ°ėģ ģµģķķģ¬ ģ ģķ ģģ¬ź²°ģ ģ“ ķģķ ź³µģ¤źµģ ėŖØėøģ ģ ķ©ķź³ ģ¤ģź°ģ¼ė” źµģ ģķ© ė° ģģ¬ź²°ģ ź³¼ģ ź³¼ ģ”°ģ¢
ėŖ
ė ¹ ź° ķģøė ź°ė„ķė¤.
4. ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėø ģė®¬ė ģ“ģ ķź²½
ģøź° ģ”°ģ¢
ģ¬ģ ģ ķ¬ė„¼ ķµķ“ ģ ģķ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģ±ė„ģ ź²ģ¦ķźø° ģķ“ ģė®¬ė ģ“ķ°ė„¼ ķ¬ķØķ ģė®¬ė ģ“ģ
ķź²½ģ źµ¬ģ±ķģė¤. ģ¬źø°ģģ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ źµģ ė° ģ”°ģ¢
ė„ė „ģ ķģøķ ģ ģź³ ėģź° ģ āė¬“ģø ķģ
ģ ķ¬ ėŖØģė„¼ ź³ ė ¤ķģ¬ ģ¤ź³ė„¼ ģ§ķķė¤. ė³ø ģ°źµ¬ģģė ģ“ė„¼ ģķ“ ģ”°ģ¢
ģ ģė®¬ė ģ“ķ° 2źø°ģ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėø 2źø°ė„¼ ėģģ ģ“ģ© ź°ė„ķź² ķģ¬ ė¤ģķ ź°ģ²“ ģ”°ķ©ģ¼ė” ģµė 2ė2 źµģ ģ“ ź°ė„ķ ķź²½ģ źµ¬ģ¶ķģė¤.
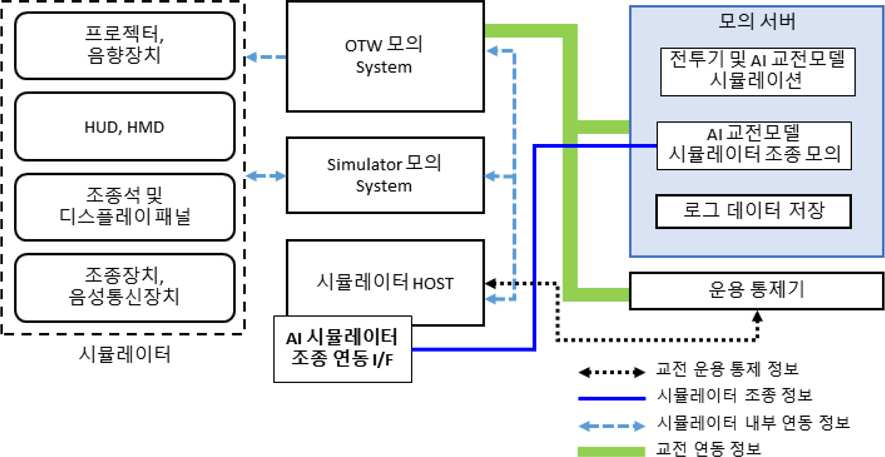
4.1 ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėø ķµķ© ģė®¬ė ģ“ģ ķź²½
ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģķ ķµķ© ģė®¬ė ģ“ģ
ķź²½ģ Fig. 6ź³¼ ź°ģ“ ģė®¬ė ģ“ģ
ģ“ģ© ķź²½ź³¼ ģė®¬ė ģ“ģ
ģģ¤ķ
ģ¼ė” źµ¬ģ±ėė¤. ģė®¬ė ģ“ģ
ģ“ģ© ķź²½ģ ė¤ģ 4ź°ģ ėŖØė, ź³µģ¤źµģ ėŖØėø(ģźµ°) ė ź³µģ¤źµģ ėŖØėø(ģ źµ°), ź³µģ¤źµģ ėŖØėø ķģ¬ ģė®¬ė ģ“ķ° ė ģøź° ģ”°ģ¢
ģ¬ ķģ¹ ģė®¬ė ģ“ķ°, ź³µģ¤źµģ ėŖØėø ķģ¬ ģė®¬ė ģ“ķ° ė ź³µģ¤źµģ ėŖØėø ķģ¬ ģė®¬ė ģ“ķ° ź·øė¦¬ź³ ź³µģ¤źµģ ėŖØėøź³¼ ģøź° ģ”°ģ¢
ģ¬ģ ģ āė¬“ģø ķģ
ģ“ģ©ģ“ ź°ė„ķėė” ģ¤ź³ėģė¤. ź·øė¦¬ź³ ź³µģ¤źµģ ģ ģ ģ©ķ F-15źø, KF-16źø ė° FA-50źø ģ ķ¬źø°ģ ė¹ķ ėģķ, ė¹ķģ ģ“ ėŖØģ ėŖØėø, ė ģ“ė, RWR(Radar Warning Receiver) ź·øė¦¬ź³ IRST(InfraRed Search and Track) ė±ģ ķģ¬ ģ„ė¹ ėŖØģ ėŖØėø, AIM-9, Gun, Flare ė° Chaff ė± ė¬“ģ„ ė° ķķ¼ ģ„ė¹ ėŖØģ ėŖØėø ė±ģ ź°ė°ķģ¬ ķµķ© ģ“ģ©ģ“ ź°ė„ķėė” ķģė¤.

ģė®¬ė ģ“ģ
ģģ¤ķ
ģ ź³µģ¤źµģ ėŖØėø, ģė®¬ė ģ“ķ°, ģ”°ģ¢
ģ¬ ėŖØėø, ėŖØģ ģģ§ ė° ķģ ėŖØėøė§ ė° ź²°ź³¼ė¶ģ S/W ė±ģ źµ¬ģ±ģģė¤ė” ģ“ė¤ģ ø ģģ¼ė©°, ź° źµ¬ģ±ģģė¤ģ DIS(Distributed Interactive Simulation) ķģ¤ģ ķģ©ķģ¬ ģ ķ¬źø° ė° AI ź³µģ¤źµģ ėŖØėøģ ģķģ ė³“, ėŖØģ ģ“ė²¤ķø ģ ė³“ ė±ģ ź³µģ ķė¤. ķµķ© ģė®¬ė ģ“ģ
ķź²½ģ ģ ķ¬źø° ė° ķģ¬/ė¬“ģ„ ź“ė Ø ėŖØėøė¤ź³¼ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ“ ģė®¬ė ģ“ģ
ģģ¤ķ
ģ ķµķ“ źµģ ģ ģķķź² ėė¤. ėķ, ģė®¬ė ģ“ģ
ģģ¤ķ
ģ źµģ ģ ėŖØģķźø° ģķ ģėė¦¬ģ¤ ģ¤ģ , ģ ķ¬źø° ģ¤ģ , źµģ ź²°ź³¼ ė¶ģ ė° ė”ź·ø ģ ģ„/ź“ė¦¬ź° ź°ė„ķėė” ģ¤ź³ėģė¤.
4.2 ģė®¬ė ģ“ķ° ģ¤ź³
ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėø ź²ģ¦ģ ģķ ģė®¬ė ģ“ķ°ė ģøź° ģ”°ģ¢
ģ¬ ėė ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ“ ģ”°ģ¢
ķ ģ ģėė” ģė®¬ė ģ“ķ° 2ģź³¼ ģ“ģ© ķµģ ģģ¼ė” źµ¬ģ±ķģ¬ ģ¤ź³ ė° ź°ė°ķģė¤. ģė®¬ė ģ“ķ°ė ģģ¼ź° ģķ 240Ā°, ģģ§ 110Ā°(ā20Ā°~90Ā°) ģģģ ģ§ģķė 3ģ±ė ėģ¤ķ¬ė¦°, F-16/F-35źø/KF-21źø ģ”°ģ¢
ģģ ģ ķģ ģ¼ė” ėŖØģķ ģ ģė ź°ė³ķ ģ”°ģ¢
ģ, Prepar 3Dė„¼ ģ¬ģ©ķ OTW(Out The Window) ėŖØģ PCģ HUD(Head Up Display), MFD(Multi Function Display) ķė©“ģ ėŖØģķė ģė®¬ė ģ“ķ° ėŖØģ PC ė±ģ¼ė” źµ¬ģ±ėė¤.
Fig. 7ģ ģė®¬ė ģ“ķ° źµ¬ģ±ģ ģøė¶ ķėŖ©ģ ķķķ ź²ģ¼ė”, ģ“ė¬ķ źµ¬ģ±ģ ģøź° ģ”°ģ¢
ģ¬ģ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģ¶ź°ķģ¬ ģµė 2ė2 źµģ ģ“ ź°ė„ķėė” ķģė¤. Host PCģģė ė¬“ģ„, ė ģ“ė, RWR ė±ģ ķģ¬ ģ„ė¹ė„¼ ėŖØģķź³ AI źµģ ėŖØėøź³¼ ģøź° ģ”°ģ¢
ģ¬ź° ź°ģ ģ”°ź±“ģģ źµģ ģ ģķķ ģ ģėė” ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģ”°ģ¢
ź° ģ°ėģ ģķ ģøķ°ķģ“ģ¤ź° ģ“ģ©ėė¤. ģ“ė„¼ ķµķ“ źµģ ģ ģķķė ėģ ė°ģ“ķ° ģ°ė ģ§ģ°ģ ģµģķķź³ ėŖØģ ķė ģ ėźø°ķė„¼ ź°ė„ķź² ķģ¬ ģķķ źµģ ģ“ ģķė ģ ģėė” ķģė¤.
ģ“ė„¼ ė°ķģ¼ė” Fig. 8ģ²ė¼ ģ¤ģ źµ¬ģ±ė ģė®¬ė ģ“ķ° ķź²½ģ ķµķ“ źµģ ģ ģķķØģ¼ė”ģØ ģøź° ģ”°ģ¢
ģ¬ģ ź²½ķź³¼ ė
øķģ°ź° ė“źø“ ģ ģ ķėØź³¼ źø°ėķģ ė° źµģ ģķ ź³¼ģ ģ źø°ė”ķź³ ģ“ģ© ķµģ ģģģ ķģøģ“ ź°ė„ķėė” ģ¤ź³ķģė¤. ėķ, ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ“ ģģ±ķ ģ”°ģ¢
ėŖ
ė ¹ ź°ģ¼ė” ģė®¬ė ģ“ķ°ź° ėģķėė” ķģ¬ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėø ģģ ģ źµģ ģķ ź³¼ģ ģ ź°ģķ ķ ģ ģė¤.

5. ģ¤ķ ź²°ź³¼ ė° ė¶ģ
ģ ķ¬źø°ģ WVR ź³µģ¤źµģ ė„ė „ģ ė¶ģ¬ķź³ ź·øź²ģ ėŖØģķźø° ģķ“ ė³ø ė
¼ė¬øģģ ģ ģķ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģ±ė„ź³¼ ģ“ģ©ģ±ģ ź²ģ¦ķź³ ķź°ķźø° ģķ“ ź³µźµ° ģ ķ¬źø° ģ”°ģ¢
ģ¬ģ źø°ė³øģ ķ¬źø°ėģ źø°ė°ķ 1ė1 Dog-Fight źµģ ģ ģķķģė¤. źµģ ģģ ģ”°ź±“ģ ģ¤ė¦½ ģ”°ź±“ģ¼ė” ź³ ė(5,000~20,000 ft, 500 ft ėØģ), ģė(300~450 kts, 1 kts ėØģ), ģėź±°ė¦¬(2,000~3,000 ft, 100 ft ėØģ)ė„¼ ģ§ģ ķ ė²ģ ė“ģģ ėØģ ź°ģ źø°ģ¤ģ¼ė” ėė¤ķź² ģ¤ģ ķģė¤. źµģ ź²°ź³¼ė„¼ ķģ ķźø° ģķ ķ¼ķ“ ķź°ė ź°ģģ ź³µź²© ģģģ źø°ģ²“ ģģ ģėæ ķķė” ė°°ģ¹ķź³ ź·ø ė²ģ ģģ ģė źø°ģ²“ź° ė¤ģ“ģ¤ė©“ health gaugeė„¼ ģ°Øź°ķė ģ¤ģ½ģ“ė§ ė°©ģģ ģ ģ©ķģė¤. ź°ģģ ź³µź²© ģģ ė²ģė ģ ķ¬źø° źø°ģ ģ 2Ā°, ģµė 3,000 ft ź±°ė¦¬ė” ģ¤ģ ķģė¤. ģ ķ¬ ģ¹ė¦¬ ģ”°ź±“ģ ģė źø°ģ²“ģ health gaugeė„¼ 0ģ¼ė” ė§ė¤ź±°ė 300ģ“ė” ģ¤ģ ķ ģ ķ¬ ģź° ė“ģ ģėė³“ė¤ ėģ health gaugeė„¼ ģ ģ§ķė ź²ģ¼ė” ģ¤ģ ķģė¤. ź·øė¦¬ź³ źµģ ģ¤ 1,000 ft ģ“ķė” ź³ ėź° ė“ė ¤ź°ė©“ health gaugeź° 0ģ“ ėģ“ ģ¦ģ źµģ ģ“ ģ¢
ė£ėėė” ģ¤ģ ķė¤.
ģ źµģ ģ”°ź±“ģ ė°ķģ¼ė”, ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģ±ė„ ź²ģ¦ģ ģķ“ ģøź° ģ”°ģ¢
ģ¬ģģ ź³µģ¤ źµģ ģ ģ§ķķģė¤. źµģ ģķ ģ ģøź° ģ”°ģ¢
ģ¬ģź² 1ģź°ģ ģ ģ ģź°ģ ė¶ģ¬ķ ķ ģ¤ķģ ģ§ķķ ź²°ź³¼, Table 1ģ²ė¼ 2ėŖ
ģ ģ ķ¬źø° ģ”°ģ¢
ģ¬ź° ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģėė” ź° 5ķģ© ģ“ 10ķģ ź³µģ¤źµģ ģ ģķķģź³ , ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ“ 100 % ģ¹ė„ ģ ė³“ģė¤. ėė¶ė¶ģ źµģ ģ“ 3ė¶ ģ“ė“ģ ģ¢
ė£ė ė§ķ¼ ģ ģ ėŖØėøģ ź³µģ¤źµģ ģ±ė„ģ“ ģ°ģķØģ ķģøķ ģ ģģė¤. ģ“ė¬ķ ź²°ź³¼ė ģė”ģ“ ģ”°ģ¢
ķź²½ģģ ģøź° ģ”°ģ¢
ģ¬ź° ź²Ŗģ ė¶ķģ ėÆģ ģ”°ģ¢
ź°ģ ź³ ė ¤ķėė¼ė ģ ģė ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ“ ģøź° ģ”°ģ¢
ģ¬ ģģ¤ģ Dog-fight źµģ ģ±ė„ģ ė³“ģė¤ź³ ķ ģ ģė¤. ķģ§ė§ źµģ ģ“ ė°ė³µ ė ģė” ģøź° ģ”°ģ¢
ģ¬ė¤ģ“ ģ ģ°Ø ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ źø°ėģ ģ ģķė ėŖØģµģ ė³“ģø ģ ģ ė³“ģ, ģ¶©ė¶ķ ģ ģ ģź°ģ“ ģ£¼ģ“ģ§ė¤ė©“ Table 1ģ ź²°ź³¼ģė ė¤ė„ø ģģģ źµģ ź²°ź³¼ź° ėģ¬ ź²ģ¼ė” ģģėė¤.
TableĀ 1.
Dog-fight result of rule-based AI engagement model vs. human pilot
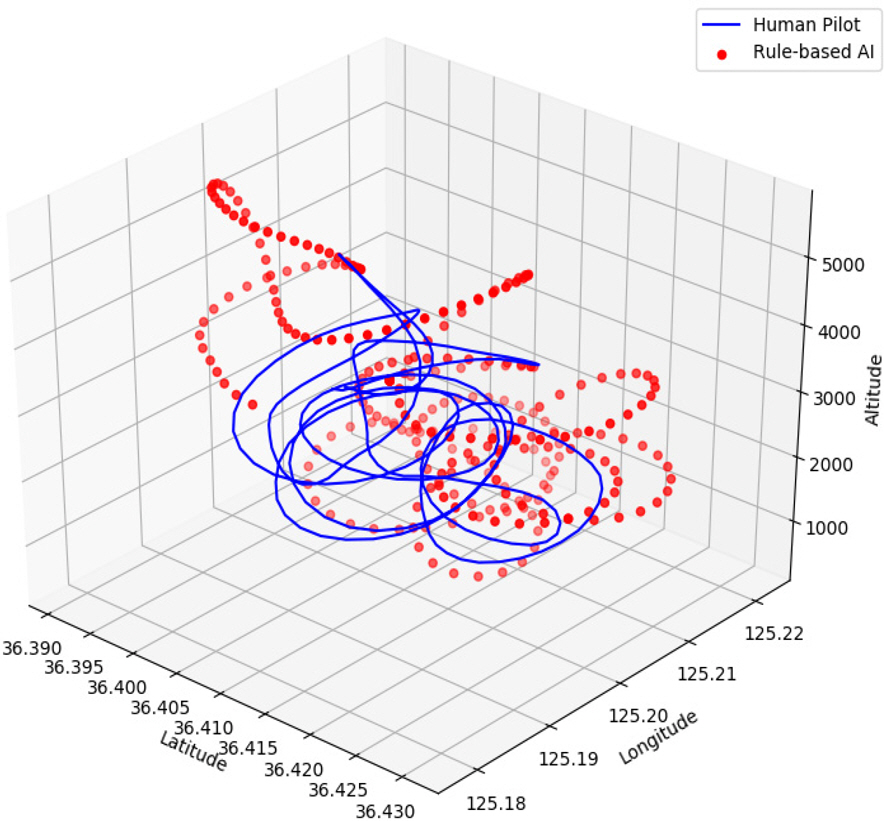
Fig. 9ė ģė®¬ė ģ“ģ
ķź²½ ģ¤ ģ“ģ©ķµģ ģ ķė©“ģ¼ė” źµģ ģ§ķ ģķ©ź³¼ ķģķøė¦¬ė„¼ ķµķ“ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ“ ģ ķķ ģ ģ ķģ ė° ģ ķ¬źø°ėģ ģ¤ģź°ģ¼ė” ķģøķ ģ ģģģ ė³“ģ¬ģ£¼ź³ ģė¤. ģźµ°ź³¼ ģ źµ°ģ ė¹ķ ź²½ė”, ģ ķ¬źø° ģģø ė° ģ ė³“ ė±ģ źµģ ģķ©ģ 3ģ°Øģģ¼ė” ģė³ ź°ė„ķź³ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ“ ģ ķķ BFM ģ ģ ķģģ ģ ķ¬ źø°ė ź²°ģ ź³¼ģ ģ ķģķøė¦¬ė„¼ ķµķ“ ź°ģķķģ¬ ģ¶ė „ķė¤. ė„ė¬ėź³¼ ź°ģ źø°ź³ķģµ ģź³ ė¦¬ģ¦ė¤ģ“ ėøėė°ģ¤ ė°©ģģ ģėģ¼ė” ģģ±ė ź²°ź³¼ģ ėķ ģ¤ź° ź³¼ģ ź²ģ¦ģ“ ė¶ź°ė„ķ ė°ė©“, ģ ģ ėŖØėøģ ķģķøė¦¬ė„¼ ķµķ“ ģ ģ ķģģ ģ ķ¬źø°ė ź²°ģ ź³¼ģ ģ ģė³ķ ģ ģģ¼ėÆė”, ģ ķ¬źø° ģ”°ģ¢
ģ¬ė¤ģź² ģ ģ ķģ, źø°ė ė° ģģ ź³ķģ ģķ źµė² źø°ė°ģ ģ ģ ģė®¬ė ģ“ģ
ķė Ø ķź²½ģ ģ ź³µķ ģ ģģ ź²ģ¼ė” ė³øė¤. ėķ, ģ ģø ģ”°ģ¢
ģ¬, ź³µģ¤źµģ AI ź³µģ¤źµģ ėŖØėøģ ģ”°ķ©ķģ¬ ģ āė¬“ģø ė³µķ© ģ“ģ© ź°ė
ģ ė¶ģķź³ ģė¬“ ķØź³¼ė„¼ ķģøķ ģ ģė ģė®¬ė ģ“ģ
ķź²½ģ¼ė”ė ķģ©ķ ģ ģģ ź²ģ¼ė” ģź°ėė¤.

ģ ķ¬ ź²°ź³¼ ė¶ģģ ģķ“ ź³µģ¤źµģ ģ ģķķė©“ģ ģģ§ķ ģ ģė ģ ķ¬źø° ģģ¹ ģ ė³“(ģ¢ķ, ź³ ė, ģė, ź²½ė), ģģø ģ ė³“(Roll, Pitch, Yaw, AOA, AOS), ģ ģ“ ėŖ
ė ¹ ė° ė¬¼ė¦¬ ģ ė³“ ė± ģ“ 45ģ¢
ė„ģ ģģ ė°ģ“ķ°(raw data)ė„¼ ķėķģė¤. Fig. 10ź³¼ 11ģ ģģ§ė ģģ ė°ģ“ķ°ė„¼ ė°ķģ¼ė” ģøź° ģ”°ģ¢
ģ¬ģ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģ ģ²“ ė¹ķź²½ė”ģ ģ ķ¬źø° ģģøģ ė³“(Roll, Pitch, Yaw)ė„¼ ė¶ģķ ź²°ź³¼ģ“ė¤. Fig. 10ģ ķµķ“ ģ ģ ģėÆģ“, ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģøź° ģ”°ģ¢
ģ¬ ėė¹ ė¶ķģķ źø°ėģ“ ģ ź³ ģµģ ģ ė¹ķź²½ė”ė„¼ ģ ķķź³ ģ“ė ź²°źµ ė ģ ģ ė¬¼ė¦¬ ģėģ§ė” ķØģØģ ģø ź³µģ¤ źµģ ģ ģķķģ¬ ģ ķ¬ė„¼ ģ¹ė¦¬ķė¤ź³ ķėØķ ģ ģė¤. ģ“ė° ź²°ź³¼ė Fig. 11ģ ģ ķ¬źø° ģģøģ ė³“ ė¶ģģģė ė³“ģ“ėė°, ģøź° ģ”°ģ¢
ģ¬ģ ģ ķ¬źø° ģģøė ģ¬ķź² ķė¤ė¦¬ė ė°ė©“, ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģøź° ģ”°ģ¢
ģ¬ ėė¹ ė¶ėė½ź³ ė³“ė¤ ģģ ģ ģø ģģø ė³ķė„¼ ė°ķģ¼ė” źµģ ģ ģķķė¤ė ź²ģ ķģøķ ģ ģģė¤. ģģ ė°ģ“ķ° ģģ§ģ ķµķ źµģ ź²°ź³¼ ė¶ģģ ķ„ķ ė³“ė¤ ė¤ģķź² ģ ģ©ė ģ ģė¤. ģģ§ė ė°ģ“ķ° ź°ģ ģź“ź“ź³ė ģøź³¼ź“ź³ ė±ģ ķµź³ģ ė¶ģģ ė°ķģ¼ė” ģė®¬ė ģ“ģ
ķź²½ź³¼ źµģ ėŖØėø ź²½ėķ ėæė§ ģėė¼ ģ”°ģ¢
ģ¬ ķė Øģ ģķ ė°±ģ
ė°ģ“ķ°ė”ė ķģ©ģ“ ź°ė„ķ ź²ģ¼ė” ķėØėė¤. ėķ, ģė Øė ė² ķ
ė ģ ķ¬ ģ”°ģ¢
ģ¬ģ źµģ ė°ģ“ķ°ė„¼ ķėķģ¬ źø°ź³ķģµ źø°ė°ģ AI ģ”°ģ¢
ģ¬ ź°ė°ģė ķģ© ź°ė„ķ ź²ģ¼ė” źø°ėķė¤.

6. ź²° ė”
ėÆøė ģ ģ„ģ ģ āė¬“ģø ķģ
ģ²“ź³ė„¼ ė°ķģ¼ė” ėŖØģģ“ķ¬ ģ ģ¼ė” ģ§ķėź³ ģė¤. ķ¹ķ, ģķėź° ėģ ź³µėź³µ ģė¬“ė„¼ ģķ AI ģ”°ģ¢
ģ¬ ź°ė°ģ ė§¤ģ° ģ¤ģķ ģ°źµ¬ ė¶ģ¼ģ“ė¤. ģ“ė„¼ ģķ“, ė³ø ė
¼ė¬øģģė ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøź³¼ ģ“ė„¼ ėŖØģķ ģ ģė ģė®¬ė ģ“ģ
ķź²½ģ ģ ģķģė¤. ģøź° ģ”°ģ¢
ģ¬ģģ źµģ ģ ķµķ“ ģ ģķ ź·ģ¹źø°ė° AI ź³µģ¤źµģ ėŖØėøģ ģ±ė„ģ ź²ģ¦ķģź³ źµģ ģķ ź³¼ģ ģ ź°ģģ ģ¼ė” ķģøķ ģ ģģģ ķģøķģė¤. ź·øė¦¬ź³ źµģ ģ¤ ģģ§ė ģģ ė°ģ“ķ°ė„¼ ė¶ģķģ¬ źµģ ź²°ź³¼ė„¼ ė³µźø°ķź³ ė ķØģØģ ģø ģ ķ¬ ģķģ ģķ ķė Ø ķź²½ģ ģ ź³µķ ģ ģģė¤. ėķ, ģ āė¬“ģø ķģ
ģ“ ź°ė„ķėė” ģė®¬ė ģ“ģ
ķź²½ģ źµ¬ģ±ķØģ¼ė”ģØ ė³ø ģ°źµ¬ ź²°ź³¼ź° ģ āė¬“ģø ė³µķ© ģė¬“ ź°ė
ģ ģ ė¦½ķź³ ķė Øķ ģ ģė źø°ģ“ź° ė ź²ģ¼ė” źø°ėķė¤. ģ“ė¬ķ ź²°ź³¼ė¤ģ ė°ķģ¼ė” ģ°ė¦¬ė ķ„ķ ė³“ė¤ ė¤ģķ AI ģź³ ė¦¬ģ¦ źø°ė°ģ ź³µģ¤źµģ ėŖØėø ź°ė°ź³¼ ģė¬“ ģ¬ķ ė¹, ź²½ė” ģ¬ķģ ė± UASė„¼ ģķ ģģØķ ģķķøģØģ“ģ ķģ¬ź° ź°ė„ķ ź²ģ¼ė” ķėØķė¤.




