



1. 서 론
무인기 체계는 무인기, 데이터링크, 지상통제장비로 구성되는 복합체계로서, 지상통제장비 내부에 위치하거나 또는 외부에 위치한 조종사가 데이터링크를 사용하여 무인기를 직접 통제하여 활주, 이륙, 비행, 착륙 등을 수행하는 대표적인 무인 체계이다.
특히 군용 무인기는 사전에 입력된 임무계획에 따라 내부 조종사나 외부 조종사의 도움이 없이도 스스로 항로를 인식하고 판단하여 자율 비행하는 비행체로서[1], 임무비행 중에 항로 및 임무를 재설정하거나, 가시선 미확보에 의한 데이터링크 두절, 시스템 고장 등의 동적 상황에 자율적인 비행안전성을 확보하는 것이 매우 중요하다. 이러한 이유로 무인기의 항공전자 아키텍처 설계는 비행안전을 중요시하는 감항성(Airworthiness)을 고려한 설계가 필요하게 되었다.
본 논문은 군용 무인기의 감항성을 고려한 항공전자 아키텍처의 최초의 설계 사례를 언급한 내용이다.
2 무인기의 항공전자 아키텍처 설계
2.1 무인기의 항공전자 아키텍처 설계
무인기는 비행조종계통, 항공전자계통, 비행센서계통, 전기계통, 탑재데이터링크 계통, 임무장비(EO/IR: Electro Optic Infra-Red, SAR: Synthetic Aperture Radar)로 구성된다. 데이터링크 계통은 가시선 1차, 2차, 위성 데이터링크의 3중화로 설계한다. 지상통제장비는 주조종사 운용장치, 부조종사 운용장치, 센서운용사장치, 데이터베이스관리장비, 임무계획장비 등으로 구성한다.
지상통제장비로부터 생성한 통제명령은 상향 가시선 1차/2차, 위성 데이터링크를 사용하여 무인기에 전달되고, 무인기의 비행 상태 정보와 탑재 임무장비로부터 획득한 임무장비 영상은 하향 가시선 1차, 위성 데이터링크를 통해 지상통제장비로 전송된다. 가시선 2차 데이터링크는 작은 대역폭 때문에 임무장비 영상정보를 송신하지 않는다.

글로벌호크의 항공전자 아키텍처는 이중화로 구현된 통합임무관리컴퓨터(IMMC: Integrated Mission Management Computer)가 비행안전과 관련된 비행조종 기능은 물론 임무수행과 관련된 임무장비 관리기능까지 수행하는 중앙집중형 구조이다. 가시선/위성 데이터링크를 통해서 지상의 조종사 명령을 수신한 통합임무관리컴퓨터는 통합연동장치(IIU: Integrated Interface Unit)를 통해서 대기자료센서, 항법센서, 레이더고도계 등의 각종 비행센서들의 자료를 전달받아 적절한 비행조종명령을 생성한 후에 추진제어장치, 조종면구동계통, 착륙계통으로 전달하여 비행제어를 수행하며, 피아식별장치, 방어지원장치(Defensive System), 통신장치, 항법장치 등의 장비들을 MIL-STD-1553B(이하 1553B) 버스로 연동한다.
Fig. 2는 설계한 무인기의 항공전자 아키텍처로서 무인기 비행을 담당하는 비행조종계통과 임무장비의 영상촬영 임무 기능을 분리한 분산형 구조로서 비행안전에 중점을 두고 있음을 보여준다. 비행안전에 직접적인 영향을 주는 필수장비인 비행조종컴퓨터(FLCC: Flight Control Computer)는 무인기 항공전자 아키텍처의 중심에 위치한다. 디지탈 비행조종컴퓨터는 동체장착 대기자료시스템(FMADS: Fuselage Mounted Air Data System), 날개장착 대기자료시스템(WMADS: Wing Mounted Air Data System), 레이더고도계(RALT: Radar Altimeter), 복합항법장치(EGI: Embedded GPS/INS), 항재밍 위성항법장치(AJ-GPS: Anti Jamming Global Positioning System) 등의 비행센서 계통으로부터 제공되는 무인기 위치, 속도, 자세 정보 등을 사용하여, 비행에 필요한 명령을 생성한다. 비행조종컴퓨터는 비행조종 명령을 생성하여 추진제어모니터링장치(IPCMU: Integrated Propulsion Control Monitoring Unit), 연료량측정장치(FPP: Fuel Probe Processor) 등의 추진연료계통과 조종면 작동기, 조종면 제어기로 구성된 조종면구동계통, 그리고 이륙, 착륙을 위한 착륙제동제어기(LBCU: Landing and Brake Control Unit), 조향제어기(SCU: Steering Control Unit), 착륙장치(Landing Gear) 등으로 구성된 착륙유압계통과 연동하여 비행 및 이륙, 착륙임무를 수행한다.
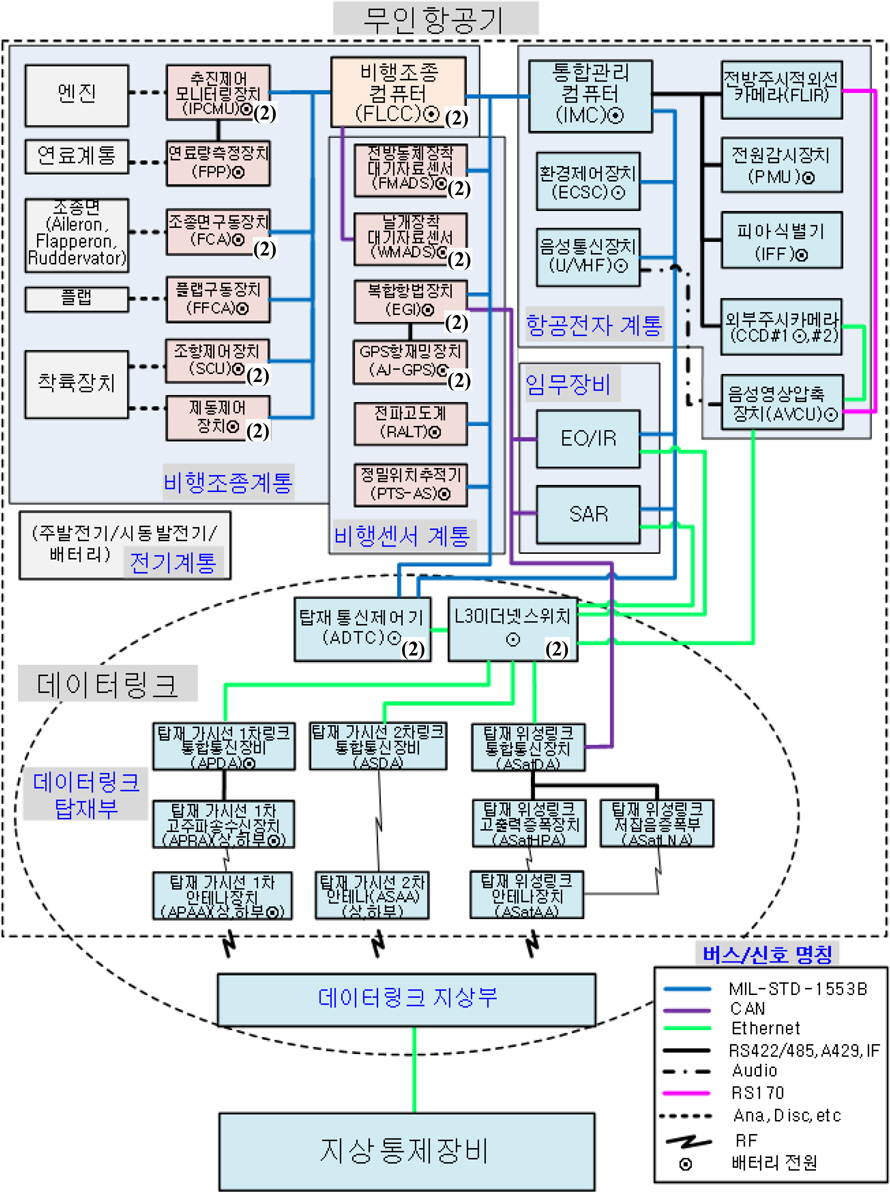
항공전자계통은 통합관리컴퓨터(IMC: Integrated Management Computer)를 중심으로 무인기 내부의 온도와 습도를 제어해 주는 환경제어장치(ECSC: Environment Control System Controller), 지상체 조종사와의 교신을 위한 초고주파 음성통신장치(U/VHF: Ultra High Frequency/Very High Frequency), 피아식별장치(IFF: Identification Friend or Foe), 주/야간 비행 중 무인기 전방의 적외선 영상을 획득하는 전방주시 적외선카메라(FLIR: Forward Looking InfraRed), 무인기 전방 및 후방에 위치하여 무인기 외부 및 무인기 동체 영상을 획득하는 외부주시 카메라(CCD: Charge Coupled Device), 그리고 음성통신데이터와 획득한 영상 데이터를 압축하여 지상통제장비로 전송하기 위한 음성영상압축장치(AVCU: Audio Video Compression Unit), 전원계통의 상태정보를 알려주는 전원감시장치(PMU: Power Monitoring Unit) 등과 연동하도록 구성하였다. 또한 통합관리컴퓨터는 임무장비의 운용을 통제할 수 있도록 구성하였다. 특히 글로벌호크의 통합임무관리컴퓨터가 비행조종 기능과 임무관리 기능을 모두 수행한 것과 달리 비행조종컴퓨터와 통합관리컴퓨터는 각각 분리 구성하여 임무장비의 성능개량에 의해 항공전자계통에 수정사항이 발생하더라도 비행조종컴퓨터에는 영향이 없도록 설계하여, 무인기의 감항인증 사안에 영향을 미치지 않게 하기 위함이다.
탑재데이터링크 계통은 탑재데이터링크제어기(ADTC: Airborne Datalink Terminal Controller)가 중심에 위치하여 탑재 가시선 데이터링크 통신과 탑재 위성 데이터링크 통신 자료를 통합한다. 탑재 가시선 데이터링크는 탑재 가시선 1차링크 통합통신장치(APDA: Airborne Primary Datalink Assembly), 탑재 가시선 1차링크 고주파송수신장치(APRA: Airborne Primary datalink RF Assembly), 탑재 가시선 1차링크 안테나 장치(APAA: Airborne Primary datalink Antenna Assembly), 그리고 탑재 가시선 2차링크 통합통신장치(ASDA: Airborne Secondary Datalink Assembly), 탑재 가시선 2차링크 안테나장치(ASAA: Airborne Secondary datalink Antenna Assembly)로 구성된다. 위성데이터링크는 탑재 위성링크 통합통신장치(ASatDA: Airborne Satellite Datalink Assembly)가 중심에 위치하여 탑재 위성링크 고출력증폭장치(ASatHPA: Airborne Satellite datalink High Power Amplifier), 탑재 위성링크 저잡음증폭기(ASatLNA: Airborne Satellite datalink Low Noise Amplifier), 탑재 위성링크 안테나장치(ASatAA: Airborne Satellite datalink Antenna Assembly) 등으로 구성된다.
지상데이터링크 계통으로부터의 지상 가시선 1차, 지상 가시선 2차, 지상 위성링크의 상향채널을 통하여 지상통제장비의 조종사 명령을 전송하며, 무인기 상태정보와 외부주시카메라의 전방 시야 확보 영상과 임무장비에서 획득한 영상을 가시선 1차링크, 위성링크의 하향채널을 통하여 지상통제장비로 전송한다. 무인기 상태정보는 가시선 2차링크를 통하여 추가로 지상통제장비로 전송한다. 임무장비 계통은 외부의 영상정보를 획득하기 위한 계통으로 전자광학영상장치(EO/IR: Electro Optic Infra-Red), 합성개구레이다(SAR: Synthetic Aperture radar) 장비로 구성된다.
2.2 다중화 아키텍처 설계
무인기 구성품의 다중화는 체계안전 신뢰도 목표치 설정에 의해 결정된다. 체계의 안전 목표치는 NATO 무인기 체계 감항인증 기준인 STANAG-4671의 SubPart-F 중 AMC.1309(b)에서 제시하는 요구사항을 만족하도록 선정[3]하였으며, 그 결과물은 Table 1이다.

무인기 체계는 24시간 비행 기준 1,000 임무비행 당 5회(손실율: 2.08×10−4/FH: Flight Hour) 이하의 중사고 발생확률 내에서 체계안전 신뢰도를 만족하도록 설정하였다. 이 설정값은 글로벌호크 무인기 시스템의 체계 신뢰도 수준(1.19×10−4/FH)과 유사하다. 체계안전 신뢰도 요구조건은 비행 시 발생될 수 있는 인적 요인과 외부 환경 그리고 체계의 기술적 고장에 의한 중사고 가능성을 포함하지만, 체계설계 단계에서 체계안전 신뢰도 만족을 위해서는 기술적 요인에 의한 고장을 최소화하는 것이기 때문에 이를 위해 무인기 체계는 전체 중사고 확률의 20 % 이하인 25,000 비행시간 당 1회 이하(4×10−5/FH)로 기술적인 고장(Technical Failures)에 의한 중사고 발생 확률을 갖도록 체계안전 목표를 설정하였다.
체계안전 신뢰도 분석을 위한 기능적 위해성 분석(FHA: Functional Hazard Analysis) 결과, 통제불능으로 무인기 추락을 초래하거나 운용요원의 사망을 초래하는 치명적(Catastrophic) 위해성 항목은 18개, 무인기 상실 가능성이 있어 강제 착륙을 초래하거나, 운용요원의 심각한 업무부하 증가나 심각한 부상을 초래하는 위험적(Hazardous) 위해성 항목은 38개가 식별되었다. 기능적 위해성 분석결과의 분포결과는 Table 1과 같다.
Fig. 3은 고장계보분석(FTA:Fault Tree Analysis) 결과이다. 설계 초기에 설정한 무인기의 체계안전 신뢰도를 만족시키기 위해서 비행조종계통의 아키텍처는 다중화 설계가 필요하였으며, 비용 대 효과 측면을 고려하여 이중화 설계로 설정하였다.

치명적/위험적 기능고장 요소에 대한 체계 고장계보분석 결과, 1.72×10−6/FH 손실율로 목표치인 4×10−5/FH 이하를 만족하였다. 각 계통 별 체계안전 신뢰도 분석 결과는 Table 2와 같다.
2.3 무인기 항공전자 데이터버스 설계
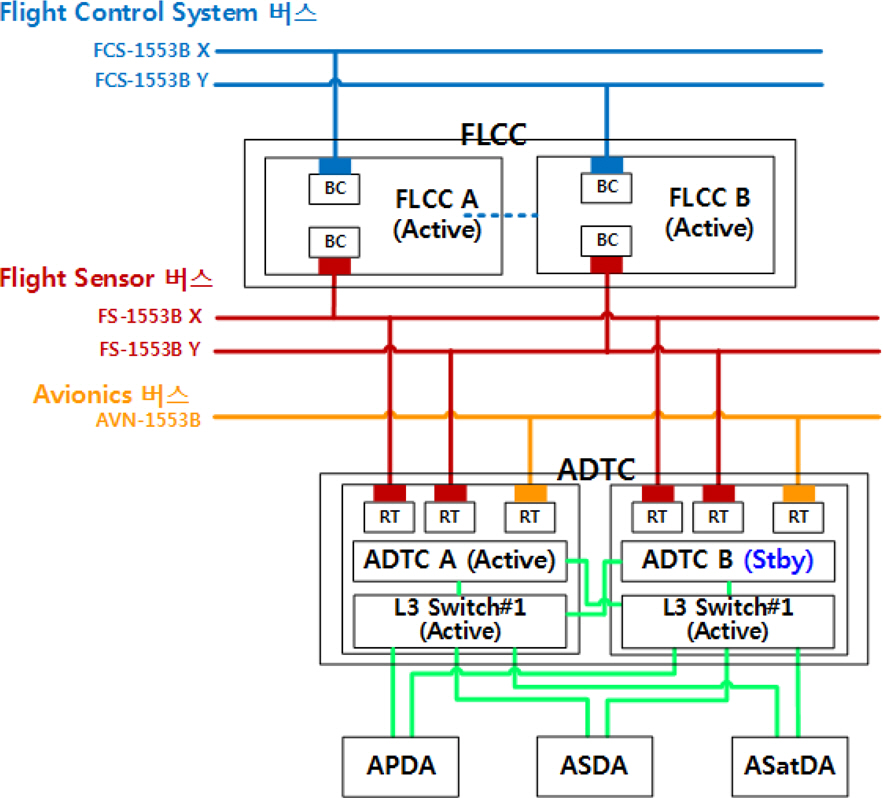
무인기를 구성하는 탑재 전자장비들 간의 데이터통신 방식으로 비행안전 필수장비나 임무 필수장비에는 고신뢰성을 갖고 있는 1553B 버스를 적용하였으며, 비행조종컴퓨터의 제어루프가 50 Hz로 수행되므로 1 Mbps의 저속의 데이터통신 속도로 인한 데이터 병목현상이 생길 것을 예측하여 2 층의 버스(X, Y)로 구성하였다. 즉, 비행조종계통을 위한 데이터버스(FCS-X, FCS-Y)와 비행센서계통을 위한 데이터버스(FS-X, FS-Y)로 분리하여 설계하였고, 또한 각 계통장비의 내부연동이나 레가시 장비와의 연동을 위해 CAN(Control Area Network) 통신, RS-422/485 통신도 적용하였다.
항공전자계통을 위한 데이터버스(AVN-X)는 통합관리컴퓨터를 중심으로 비행안전 필수(Flight/Safety Critical) 장비를 제외한 임무 필수(Mission critical) 장비를 연동하도록 설계되었으며, 단층의 1553B 버스를 사용하여 통합관리컴퓨터가 EO/IR, SAR 장비를 통제하도록 설계하였다. 1553B 버스는 기본적으로 이중화(Dual Redundant) 특성을 보유한 통신이기 때문에 임무필수장비에 적용하기에는 충분한 신뢰도를 갖고 있어 단층의 버스 구조를 적용하였다.
임무장비(EO/IR, SAR)는 1553B 버스를 사용하여 통합관리컴퓨터의 통제로 명령과 상태정보를 송수신하고, EO/IR, SAR 장비가 획득한 대용량의 영상데이터와 외부주시 CCD 카메라와 전방주시 적외선카메라로 획득한 대용량의 영상데이터는 1 Gbps(Giga bit per second) 이더넷(이하 GbE) 통신으로 이더넷 스위치를 통해서 탑재데이터링크제어기와 연동되어 지상으로 전송된다.
탑재 데이터링크 장비는 지상에 있는 지상통제장비의 조종사로부터 무인기 통제명령, 임무장비 운용명령을 가시선링크 및 위성링크의 상향채널을 통하여 수신하고, 무인기 상태정보와 임무장비에서 획득한 영상까지 하향채널을 통하여 지상통제장비로 전송해야 하기 때문에 1553B 데이터버스 외에 GbE 통신방식을 모두 보유하도록 설계하였다.
탑재 데이터링크 장비에 1553B 데이터버스 적용 시 비행센서계통과 항공전자계통의 데이터버스에 연동되도록 하였고, 비행조종계통의 데이터버스는 직접 연동하지 않고 비행조종컴퓨터가 종합하여 요약한 다음 비행센서계통의 데이터버스에 실어 탑재 데이터링크 장비로 전송되도록 설계하였다. Table 3은 1553B 버스를 사용하는 탑재장비의 RT 주소 할당표이다.
Table 3.
RT address allocation
날개장착 대기자료장치와 비행조종컴퓨터 간의 통신인터페이스는 CAN 버스를 사용하였다. 비행조종컴퓨터와 1553B 버스로 연동하는 복합항법장치의 항법정보 중 200 Hz 갱신 주기의 최신 데이터를 탑재 위성데이터링크 장비, EO/IR, SAR 장비에 제공하기 위해 독립적인 CAN 버스를 추가하였고, 복합항법장치가 Broadcast 방식으로 항법정보를 제공하도록 설계하였다. Table 4는 CAN 버스 장비 연동표이다.
2.4 무인기 데이터링크 아키텍처 설계
데이터링크 아키텍처는 가시선 데이터링크(1차 링크, 2차 링크)와 위성 데이터링크의 3중 링크로 구현해 무인기의 생존성을 강화하였다.
탑재데이터링크제어기는 탑재1차링크 통합통신장치(APDA), 탑재 2차링크 통합통신장치(ASDA), 탑재위성통신장비(ASatDA)를 제어 및 통합하여 비행체와 지상 조종사 간의 데이터 통신을 담당하는 역할을 한다. 탑재데이터링크제어기는 무인기 체계의 다중화 요구사항 및 안전 요구도를 고려하여 이중화로 설계하였으며, Hot/Standby 방식을 적용하여 Hot 장비가 고장이 나더라도 즉시 Standby 장비로 대체가 가능하도록 하였다.
비행조종컴퓨터는 이중화로 설계되어 Active/Active 방식으로 동작하는데, 각각의 1553B 버스에 이중화된 각각의 탑재데이터링크제어기가 Active/Standby 방식으로 연동되도록 하여 각각의 탑재데이터링크제어기에 별도의 RT주소를 할당하였다. 이중화 운용 개념은 Active 탑재데이터링크제어기 문제 발생 시 Standby 탑재데이터링크제어기로 전환 운용 하는 것이다. Fig. 4는 비행조종컴퓨터와 탑재데이터링크제어기 간의 1553B 버스 연동 아키텍처이다.
또한 1차링크/2차링크/위성링크 탑재통신장비는 비행조종계통, 항전계통, 임무장비와 이더넷 연동을 필요로 하여, 외부 GbE 스위치 연동과 탑재데이터링크제어기 내부 스위치 연동의 대안 분석 결과로 탑재장비의 중량을 최소화하는 측면에서 탑재데이터링크제어기 내부에 GbE 스위치를 이중화하는 것으로 설계 하였다. 선택한 GbE 스위치는 다음과 같은 특징을 가진다.
Table 5.
L3 GbE switch port allocation
지상통제장비의 조종사는 가시권 영역에서는 가시선 데이터링크를 주링크로 설정하고, 비가시권 영역에서는 위성데이터링크를 주링크로 설정하여 임무를 수행한다.
데이터링크 네트워크는 지상통제장비 기준으로 상향 명령이나 하향 상태정보 등의 무선링크를 통해 주고받는 패킷들은 패킷 처리의 유연성을 위해 UDP 멀티캐스트 기반으로 연동한다. 지상통제체계와 데이터링크 구간의 메시지는 NATO STANAG-4586 메시지 포맷의 헤더 일부분을 적용하였으며[4], 탑재데이터링크제어기 이후의 무인기 내부의 1553버스를 사용하는 항공전자장비와의 연동은 레가시 메시지로 탑재데이터링크제어기 내에 위치한 비행체고유모듈(VSM: Vehicle Specific Module) 소프트웨어에서 메시지 변환이 이루어진다. 데이터링크 장비 간 메시지는 STANAG-4586 메시지 형태를 그대로 사용한다.
주링크를 가시선 데이터링크로 선택된 경우 가시선 1차 데이터링크를 사용하며, 가시선 1차 링크가 두절된 경우, 가시선 2차 데이터링크를 사용하며, 가시선 2차 링크도 두절된 경우에 위성 데이터링크를 사용하게 된다. 주링크를 위성 데이터링크로 선택한 경우에는 위성 데이터링크를 사용하다가 두절된 경우 가시선 1차 데이터링크를 사용하며, 1차링크도 두절된 경우에 가시선 2차 데이터링크를 사용한다. 가시선/위성 데이터링크는 무선 구간에서의 링크 두절 시, 통신장치와 안테나장치 모두 링크 재연결을 계속적으로 시도한다. 가시선 1차 링크, 가시선 2차 링크, 위성링크 모두 연결이 되지 않는 경우 무인기는 사전에 계획된 귀환경로를 따라 착륙 대기지점으로 이동하여 일정시간 동안 링크 재연결을 시도하고 링크가 복구되지 않으면, 무인기는 공중배유를 수행하여 착륙중량을 맞춘 후에 사전 계획된 활주로로 자동착륙을 수행한다.
2.5 무인기 전기계통 설계
무인기의 전력 공급원은 3가지이며 주발전기, 시동발전기 및 배터리로 구성된다. 주발전기는 엔진에 연결된 외부의 기어박스를 통해 엔진의 회전력을 전달 받아 115 V, 3상의 교류 전압을 발생시킨 후 다시 직류변환기를 거쳐 28 V 직류전압을 생성하여 무인기 탑재장비들의 주 전원으로 사용한다. 시동발전기는 엔진의 보조 기어박스에 직접 체결되어 회전하면서 28 V 직류전압을 생성하여 보조 전원으로 사용한다. 배터리는 엔진고장으로 인하여 주발전기와 시동발전기가 동시에 전력을 공급하지 못하는 비상 상황의 경우에 대비한 백업전원으로 비행안전 필수장비(Fig. 2에서 ⊙ 표시)들의 전원을 공급하도록 구성하여 비행종료 지점까지 비행할 수 있는 전력을 공급한다.
무인기의 전력소모는 전기부하분석을 통해 계산된다. 전기부하분석은 항공기 전기계통 설계를 위해 가장 먼저 수행되어야 하며, 무인기에 장착되는 각 전기장비들의 교류와 직류의 전기 소모량을 분석하고, 무인기 운용조건, 운용시간 등을 고려하여 항공기 각 구성품의 전기부하를 분석한다. 이러한 전기부하 분석 결과는 발전기, 배터리 등 전원과 TRU(Transformer Rectifier Unit)와 같은 전기변환 장치의 용량을 선정하는 것은 물론 각 전원 발생 및 변환장치와 버스 할당을 위해 사용된다. 또한 각종 컨텍터(Contactor), 릴레이(Relay), 커넥터(Connector) 등을 포함한 전기 분배 장치 선택과 전선 굵기(Wire gauge) 선정 시에도 전기부하분석 결과를 적용한다.
무인기의 지상에서의 최초 전력공급은 외부의 지상전원공급기로부터 교류전원과 직류전원을 입력으로 받아 엔진시동을 걸어 운용이 가능하도록 설계하였다. Fig. 5는 전기계통 구성도이다.

2.6 무인기 자율화 설계
무인기의 자율화는 비행과 관련한 자율화(Autonomous vehicle operation)와 임무장비 촬영임무와 관련한 자율화(Autonomous payload operation)로 구분할수 있다. 무인기의 비행 자율화는 비행조종컴퓨터에 저장된 비행항로점 정보와 비행조종컴퓨터 OFP의 운용로직의 조합이 주어진 비행 상황에 자율적으로 잘 대처하는 가로 판단한다. 임무장비 촬영임무의 자율화는 무인기가 촬영이 가능한 특정 항로점에 도달하여 자동으로 사전 계획된 목표물을 잘 촬영하는 가로 판단한다. Table 6은 무인기의 자율화수준을 정의한 분류체계이다[5].
Table 6.
Taxinomy of UAV levels of autonomy
Table 6에서 글로벌호크 무인기는 비행 자율화 레벨 2 수준의 무인기로 분류되어 있어 체계운용자가 항로점을 지정하여 자동비행을 수행하는 수준으로 보이며, 임무장비 자율화 레벨 2로 분류되어 있어 지상의 센서운용자가 목표 지점을 지정하면 지정한 목표지점을 자동촬영하는 수준으로 판단된다. 설계한 무인기는 사전에 계획된 항로점으로 자동비행 할 수 있는 기능을 보유하나 체계운용자의 통제하에서의 자동비행을 수행하기 때문에 레벨 2 수준으로 판단되며, 임무장비는 지상의 센서운용자의 통제하에 자동촬영을 수행하거나 사전계획된 비행항로점을 따라 목표 지점의 자동 촬영도 할수 있는 레벨 3 수준의 자율화로 판단된다.
2.7 무인기 항공전자 체계의 검증 환경 구축
무인기의 선진국인 미국에서 이미 개발된 무인기의 고장율을 분석한 자료를 인용하면, 100,000 비행시간에 근거한 미국의 군용무인기(RQ-1 프레데터, RQ-2 파이오니어, RQ-5 헌터)의 시스템 고장 평균의 주요 계통별 비율은 Table 7과 같다. Table 7에서 전원/추진계통과 비행조종계통의 고장율이 63 %로 전체 고장의 절반 이상을 차지하고 있다[6]. 즉, 전원/추진계통과 비행조종계통은 비행안전 필수계통에 해당하는 장비들로서 치명적인 기능고장을 초래하여 무인기 손실율에 중요한 비중을 차지한다는 점이다. 따라서 개발 단계에서도 전원/추진계통과 비행조종계통의 면밀한 설계와 충분한 검증은 차후 양산 이후 운용단계에서의 시스템 신뢰도 향상에 직접적인 영향을 준다고 할 수 있다.
개발 단계에서 비행조종계통의 고장율을 낮추는 방법은 과거부터 수행해 온 체계 수준의 무인기 체계 HILS[7]나 계통 수준의 비행조종 HILS 환경을 구축하여 검증할 수 있다. 또한 전원/추진계통의 고장율을 낮추는 방법으로 엔진 시험실에 발전기 등의 전기계통을 통합하여 시험할 수 있는 계통 실험실을 구축하여 전원/추진계통의 검증을 할 수 있다. 그러나 비행조종 HILS 환경에서의 비행조종컴퓨터 단독의 고장주입 시험이나 전원/추진계통의 단독 시험 환경에서는 전원/추진계통의 고장 발생에 따른 체계 전체의 파급 영향성이나 전원계통의 과도현상에 기인한 비행조종계통의 영향성에 대해 확인이 불가능하기 때문에 비행조종계통과 전원/추진계통 뿐만 아니라 항공전자, 데이터링크를 포함하는 무인기와 지상체까지 포함하는 무인기 체계 SIL 시험환경의 구축이 필요하다[8]. 무인기 체계 SIL 시험환경은 정상적인 장비 간 연동 및 체계 전체의 연동을 확인하는 시험 외에 비정상 운용시험, 비상 운용시험과 같은 다양하고 충분한 검증을 할수 있도록 구축하는 것이 매우 중요하다. 특히 무인기 운용상에 통제권변경이나 임무교대와 같은 다수의 무인기 간의 운용로직 검증도 중요하기 때문에 확장성을 보유하도록 면밀히 검토하여 설계되어야 한다. Fig. 6은 무인기 체계개발 단계에서 검증해야 할 주요 내용을 간략하게 표현한 것이다.

실험실 수준에서의 검증이 완료되면 활주로 환경에서의 데이터링크 안테나의 지향 특성과 무인기와 지상통제장비까지 포함하는 체계 전체의 연동을 고려한 체계통합시험이 필요하다. 체계통합시험의 범위는 비행시험 이전에 지상에 할 수 있는 모든 시험을 포함한다. 여기서 저속활주 시험 정도는 포함할 수 있다. 고속활주 시험부터는 비행시험의 범주에 포함된다.
3. 결 론
군용 무인기의 항공전자 체계 아키텍처를 설계함에 있어, 최초로 NATO 무인기 체계 감항인증 기준을 도입하여 그 기준을 충족하도록 설계하였고, 그 결과를 제시하였다. NATO 무인기 감항인증 기준인 STANAG-4671의 SubPart-F 장비 분야 중 AMC.1309(b)에서 제시하는 요구사항을 참고하여 체계안전 신뢰도 목표값을 설정하였다. 기능적 위해성 분석과 고장계보분석을 통해 설계한 항공전자 아키텍처가 체계안전 목표치를 충족하기 위해 비행조종계통이 이중화로 설계가 필요함을 확인하였고, 재 분석을 통해 최종 설계한 항공전자 아키텍처가 설정한 체계 안전신뢰도 목표값을 충족함을 확인하였다.
설계한 항공전자 아키텍처는 무인기 제작 후, 체계 SIL 통합시험과 체계통합시험, 비행시험을 통하여 설계의 적합성을 입증하였고, 국내 군용 무인기 개발의 기반 기술이 되었다.
설계한 무인기 항공전자 아키텍처는 차세대 무인기 시스템 개발 시 좋은 예가 될 것이며, 이 후에 차세대 용으로 한 단계 더 발전된 형상이 될 것으로 기대한다.




