



1. 서 론
해양무인체계 기술의 최고선진국인 미국을 중심으로 우리나라를 비롯한 각 주요 선진국들은 군집 무인수상정(USV, Unmanned Surface Vehicle) 기술 개발에 힘쓰고 있다[1]. 군집 무인수상정은 미래 해상전을 주도할 비대칭 전력으로 인명 손실을 최소화하고 전투력 우위를 확보하기 위한 자율제어 기반의 다중 해양무인플랫폼이다. 군집 운용은 일반적으로 단일 운용에 비해 해양 수색/정찰, 수송, 구조작업, 기뢰 탐색 및 대장선 엄호 등 광범위한 지역의 임무에서 효율적이고 폭넓은 응용전망을 가지며, 무인수상정 간에 협동임무가 가능하도록 지속적인 연구가 수행되고 있다[2,3].
대형 선박 및 소형 어선이 왕래하는 실제 해상환경에서 선박 충돌사고는 경제적 손실을 초래하기 때문에 자율운항에서 충돌회피는 매우 중요한 사안이다. 이에 따라 국제해상충돌예방규칙(COLREG, International Regulations for Preventing Collisions at Sea, 1972)에서 선박 간 조우 시 충돌회피를 위한 절차를 제시하고 있으며, 최근 COLREGs 준수를 고려한 충돌회피 알고리즘에 대해 다양한 연구가 진행된 바 있다. 관련된 연구로 Y. Cho.외는 COLREGs를 고려한 확률적 속도 장애물(PVO, Probabilistic Velocity Obstacle) 기반 충돌회피 방법을 제안하였으며[4], D. Kim.외 및 H. Kim.외에서는 COLREGs 조건을 최근접점에서 상대선과의 거리(DCPA, Distance to Closest Point of Approach), 최근접점에 이르는 시간(TCPA, Time to Closest Point of Approach)을 이용한 충돌회피 방법을 제안하였다[5,6]. W. Naeem. 외는 방향 우선 순차적 선택(DPSS, Direction Priority Sequential Selection)을 활용한 경로생성 방법을 이용하였다[7]. 하지만 위의 연구는 다수의 무인수상정 운용에는 적용할 수 없다. 군집 무인수상정 운용을 위해서는 대형을 형성하고 주어진 경로를 추종할 수 있는 편대 제어(formation control) 기술이 필요하다. 최근 무인항공기 또는 지상 이동로봇 분야에서 활용되는 편대/군집 주행 알고리즘을 군집 무인수상정 편대 제어에 적용한 연구가 다수 발표된 바 있으나 대부분 편대 제어 및 장애물 회피에만 중점을 두고 있어 COLREGs 조건을 고려한 연구는 아직 미흡한 실정이다[8–10].
따라서 본 논문에서는 다양한 COLREGs 상황에서의 충돌회피가 가능한 군집 무인수상정 편대 제어 알고리즘을 제안한다. 안정적인 편대 제어를 위해서는 상황에 따른 무인수상정 속도와 방향 제어를 고려한 알고리즘이 필요하다. 특히, DWA(Dynamic Window Approach)는 이동체의 운동특성을 고려한 최적의 속도와 각속도를 도출하는 알고리즘으로 특정조건에 따라 이동체의 속도와 방향에 제약을 주는데 용이하다[11]. 기존에 D. Kim.외에서 COLREGs 조건을 DWA 알고리즘에 적용한 충돌회피 방법이 연구된 바 있으며, 본 연구에서는 기존 논문의 내용을 확장하여 COLREGs 제약조건을 고려하고 군집 무인수상정 각각의 최적의 속도와 가속도를 계산함으로써 강건한 대형 유지와 충돌회피가 가능한 편대 제어 알고리즘을 제안한다.
본 논문의 구성은 다음과 같다. 2장에서는 관련된 연구에 대해 소개하고 3장에서는 제안된 방법에 대해 상세하게 설명한다. 4장에서는 다양한 COLREGs 상황에서의 시뮬레이션 결과를 통해 제안된 방법의 효용성을 검증하고 끝으로 5장에서는 결론을 맺는다.
2. 관련 연구
2.1 편대 제어 알고리즘
기본적으로 편대/군집 주행 알고리즘 크게 행동기반(Behavior-based)[12], 가상구조(Virtual structure)[13], 선도-추종(Leader-follower)[14] 방법으로 분류된다. 최근 군집 무인수상정 운용에 있어 가상구조와 선도-추종을 활용한 연구가 많다. X. Yan 외 및 G. Tan 외에서 가상구조 기반의 APF(Artifical Potential Field)를 활용한 군집 무인수상정 편대 제어 알고리즘을 제안하였다[15,16]. 대형 형성과 유지에는 용이하지만 가상구조에 의존적이고 대형의 변형에 취약하다. 또한 APF는 이동체의 속도를 반영할 수 없어 동적 장애물 회피를 위해서 추가적인 알고리즘이 필요하다. 선도-추종은 선도 이동체가 경로를 따라 이동하면 추종 이동체들이 선도 이동체와 일정한 상대 거리 및 방향각을 유지하면서 이동하는 기하학적인 관계를 이용하는 방법으로 S. He 외에서는 선도 이동체(leader)의 의존성을 개선한 편대 제어 알고리즘을 제안하였다[17]. 본 논문에서는 위 연구들과 마찬가지로 가상구조와 선도-추종과 같은 기존 방법을 활용 및 결합하고 COLREGs 제약조건을 고려하여 기존 연구보다 실용적인 방법을 제안한다.
2.2 국제해상충돌예방규칙(COLREGs)
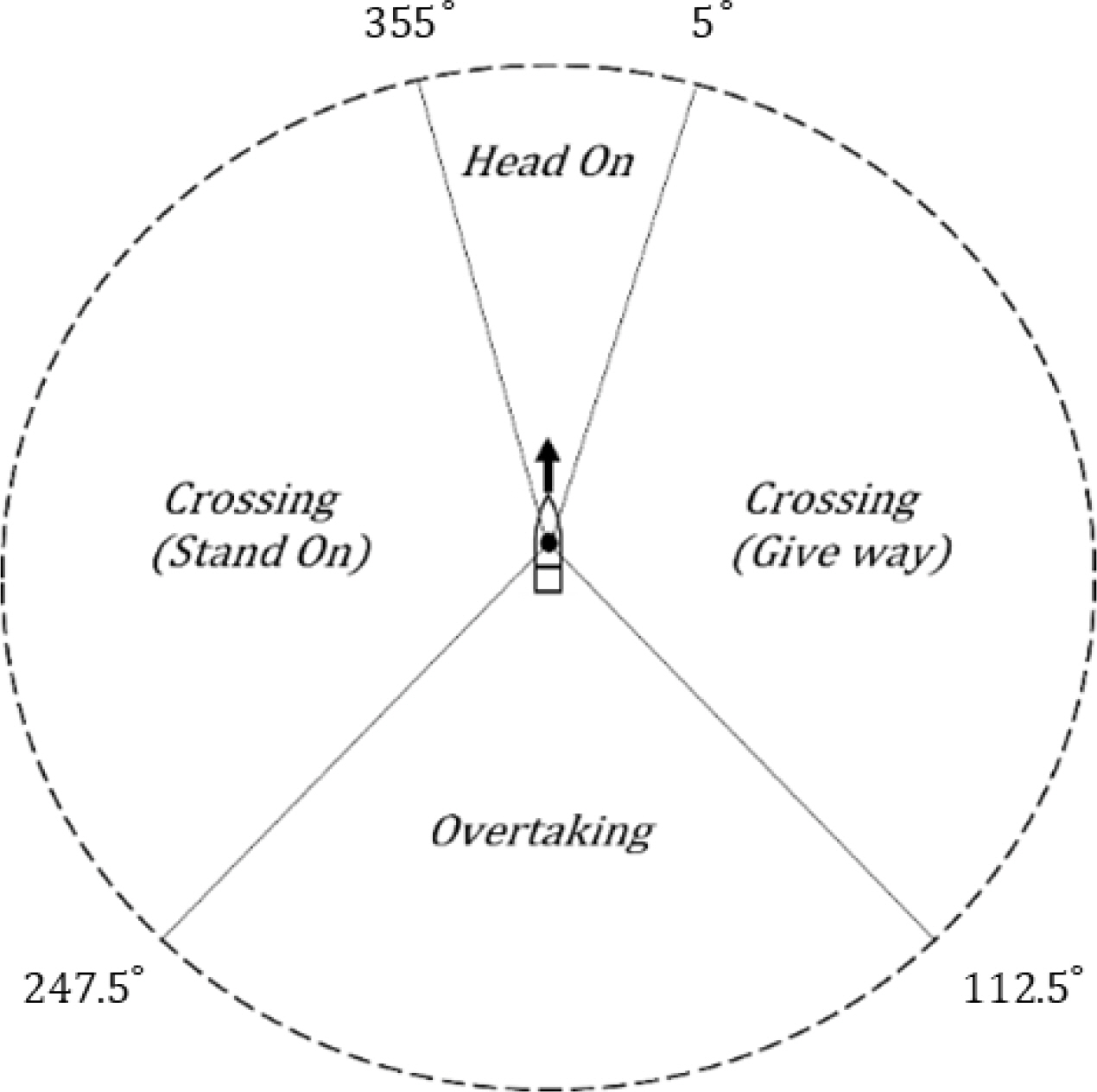
해상환경에서 선박 간 충돌 회피는 국제해상규칙인 COLREGs에 따라야하며 군집 무인수상정 또한 향후 실해역 운용을 고려하여 충돌 위험을 초래하지 않도록 편대 제어를 수행해야한다. Fig. 1에서 보듯이 COLREGs에서는 타선이 자선을 기준으로 상대적인 위치에 따라 대표적으로 정면 상태(head on), 횡단 상태(crossing), 추월 상태(overtaking)로 나타낼 수 있다. 이외에도 여러 상황을 규정하고 있으나 추월을 제외한 나머지 상황에서 자선은 우현으로 침로를 변경하여 타선을 좌현에 두고 좌현 대 좌현으로 항과 해야한다.
본 연구에서는 제안된 방법이 모든 COLREGs 조건을 준수하면서 안정적인 편대 제어가 가능함을 확인하기 위해 시뮬레이션 상에서 타선의 위치와 진행방향을 다양하게 설정하였다.
3. COLREGs 기반 군집 무인수상정의 편대 제어
3.1 경로 계획 알고리즘
해상환경에서 군집 무인수상정의 편대를 제어하기 위해 가상의 선도수상정과 실제 추종수상정으로 분류한다. 가상의 선도수상정은 초기에 설정된 경로점/목표점을 향해 이동하고 추종수상정들은 가상의 선도수상정을 따라 이동한다. 이에 따라 편대 제어를 위해서는 기본적으로 각각의 무인수상정은 동적/정적 장애물 회피뿐만 아니라 군집 내 선체 간 충돌 방지가 고려된 경로계획이 필수적이다.
본 연구에서는 이동체의 운동특성을 반영하여 경로를 계획할 수 있고 장애물 탐지 정보를 반영한 최적 이동 조건을 도출할 수 있는 DWA 알고리즘을 활용한다.
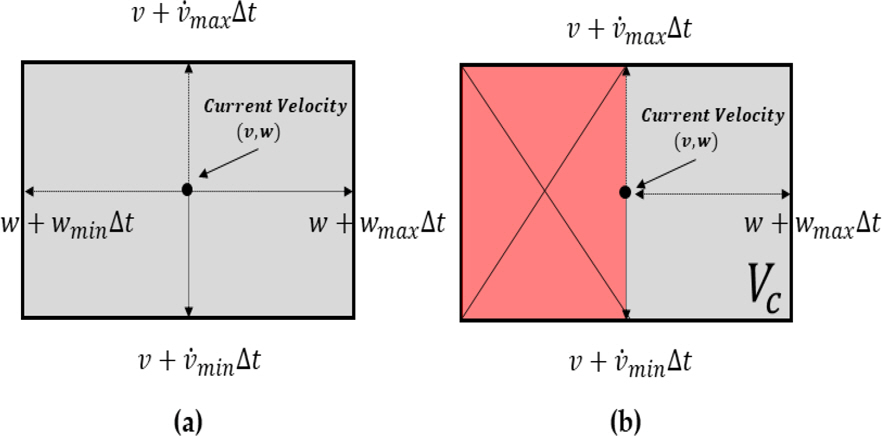
DWA 알고리즘은 무인수상정의 현재 선속도와 각속도가 포함된 운동모델에서 다음 시간까지 취할 수 있는 제어입력 범위를 나타내는 dynamic window를 계산하고 그 범위 내에서 제어입력을 샘플링하여 사전에 정의한 목적함수가 최대가 되는 제어입력 쌍을 도출한다. Fig. 2는 생성된 dynamic window를 나타낸다[18].

세로축과 가로축은 각각 선속도 v와 각속도 w를 나타내며, Vs는 무인수상정이 취할 수 있는 선속도와 각속도의 최대·최소 제어범위, Vd는 무인수상정이 다음 제어입력 시간 Δt동안 취할 수 있는 선체 가감 사양이 반영된 v, w의 범위는 식 (1)과 같이 표현된다. v ˙ w ˙
Vα는 장애물을 탐지하는 센서에 의해 관측된 장애물의 충돌범위와 무인수상정의 최대 감속 값으로부터 계산된 안전한 제어입력 범위이다. 최종적으로 제어입력의 범위 Vr은 식 (2)와 같이 Vs, Vd, Vα의 교집합에 해당하는 영역을 나타낸다[18].
Vr에서 제어입력 쌍 v, w을 샘플링하여 DWA 알고리즘의 목적함수 G(v, w)가 식 (3)과 같이 가장 큰 값을 갖는 입력 쌍 v, w를 도출한다[18].
여기서, σ는 필터를 위한 계수이고 α, β, γ는 목적함수를 이루는 각 항에 대한 가중치이다. heading (v, w) 항은 제어입력 후 무인수상정의 진행 방향과 목표지점으로부터 선수각에 대한 차이를 나타내고 clearance (v, w) 항은 제어입력 후 센서에 탐지된 장애물과의 최단거리, velocity (v, w) 항은 제어입력 후 무인수상정의 속도를 나타낸다[18].
3.2 편대 제어 알고리즘
가상의 선도수상정을 따라 추종수상정들은 사전에 정해진 대형을 이루며 편대 이동을 하게 된다. 본 논문에서는 안정적인 편대 제어를 위해 가상구조와 선도-추종 방법을 응용하였다. 가상의 선도수상정 위치를 기준점으로 생성된 가상구조는 Fig. 3과 같이 나타낸다.
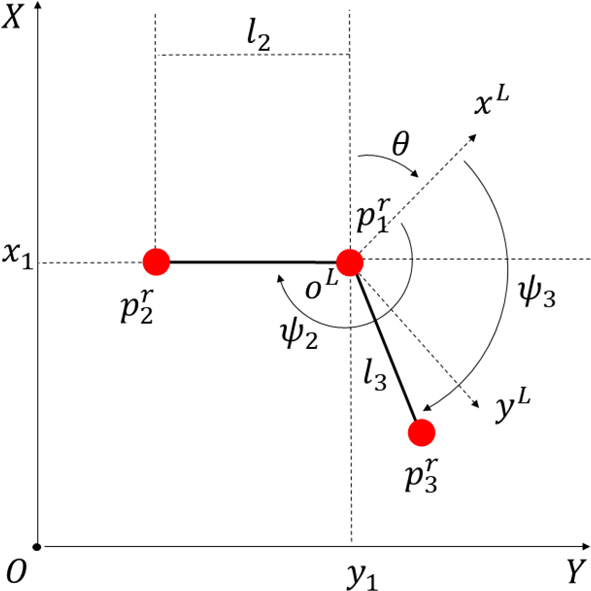
가상구조를 수학적으로 표현하기 위해 임의의 위치좌표 p(x, y)∈R2는 XOY 지구고정좌표계를 적용한다. 여기서, p 1 r p i r p 1 r p 1 r
여기서, R(θ + ψi) 는 XOY 지구고정좌표계에서 가상의 선도수상정의 진행방향 θ 을 기준으로 ψi만큼 회전된 가상구조점 p i r p 1 r
Fig. 4에서 보듯이 가상의 선도수상정을 기준으로 가상구조점이 생성되면 설정된 경로를 따라 이동한다. 각각의 가상구조점은 추종수상정들의 지향해야할 목표점 역할을 수행한다.
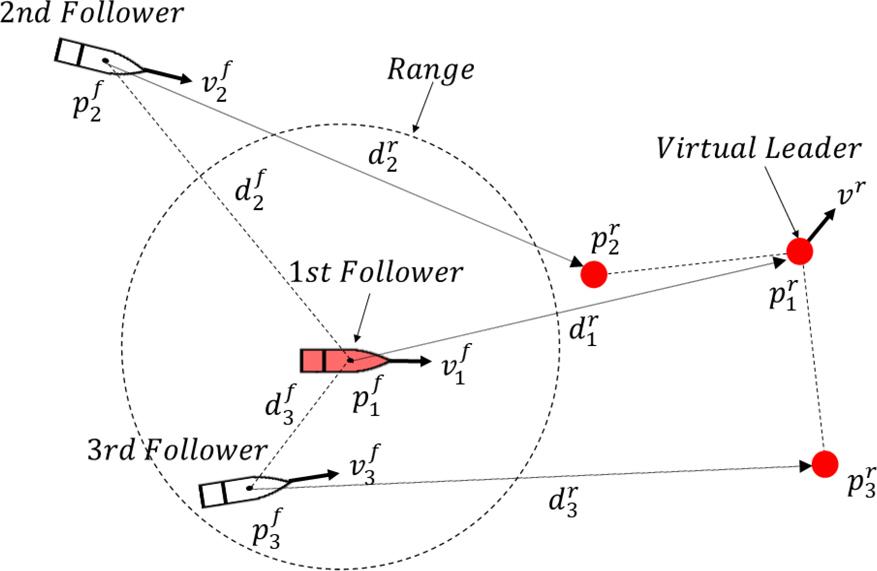
여기서, p i r p i f
r 는 휴리스틱하게 결정되는 값으로 가상구조와 실제 군집을 이루는 중심 간 떨어진 거리에 영향을 미친다. r가 작을수록 가상의 선도수상정의 움직임에 무인수상정 편대가 민감하게 반응하기 때문에 군집의 형상이나 크기에 따라 적절한 값을 설정해야한다. 또한 안정적인 편대 제어를 위해서는 편대를 갖추기 전에는 가상의 선도수상정은 이동하지 않으며, 실제 수상정의 장애물 식별이 가능한 센서 범위 이내로 움직임이 제한된다. 먼저 실제 수상정들이 군집형상 범위 내에 합류하여 자리에 위치해야하고 일정한 편대를 유지하기 위해 가상구조와 실제 수상정 간의 떨어진 거리에 따라 적절한 속도 조절이 필요하다. Fig. 4에서 d i f d i r v i f v i max
여기서, ζi는 i번째 추종수상정의 속도 제한 인자로 0과 1사이 값을 가지며 Φ(∗)는 scale factor이다. 식 (7)을 앞서 3-1절에서 언급한 dynamic window를 생성하는 식 (1)에 적용하면 무인수상정의 제어 가능한 최대 속도를 제한할 수 있다. 즉, i번째 수상정의 현재 속도 u i f v + v ˙ m i n △ t ≤ v ≤ v + v ˙ m a x △ t × ξ
3.3 COLREGs 기반 충돌 회피
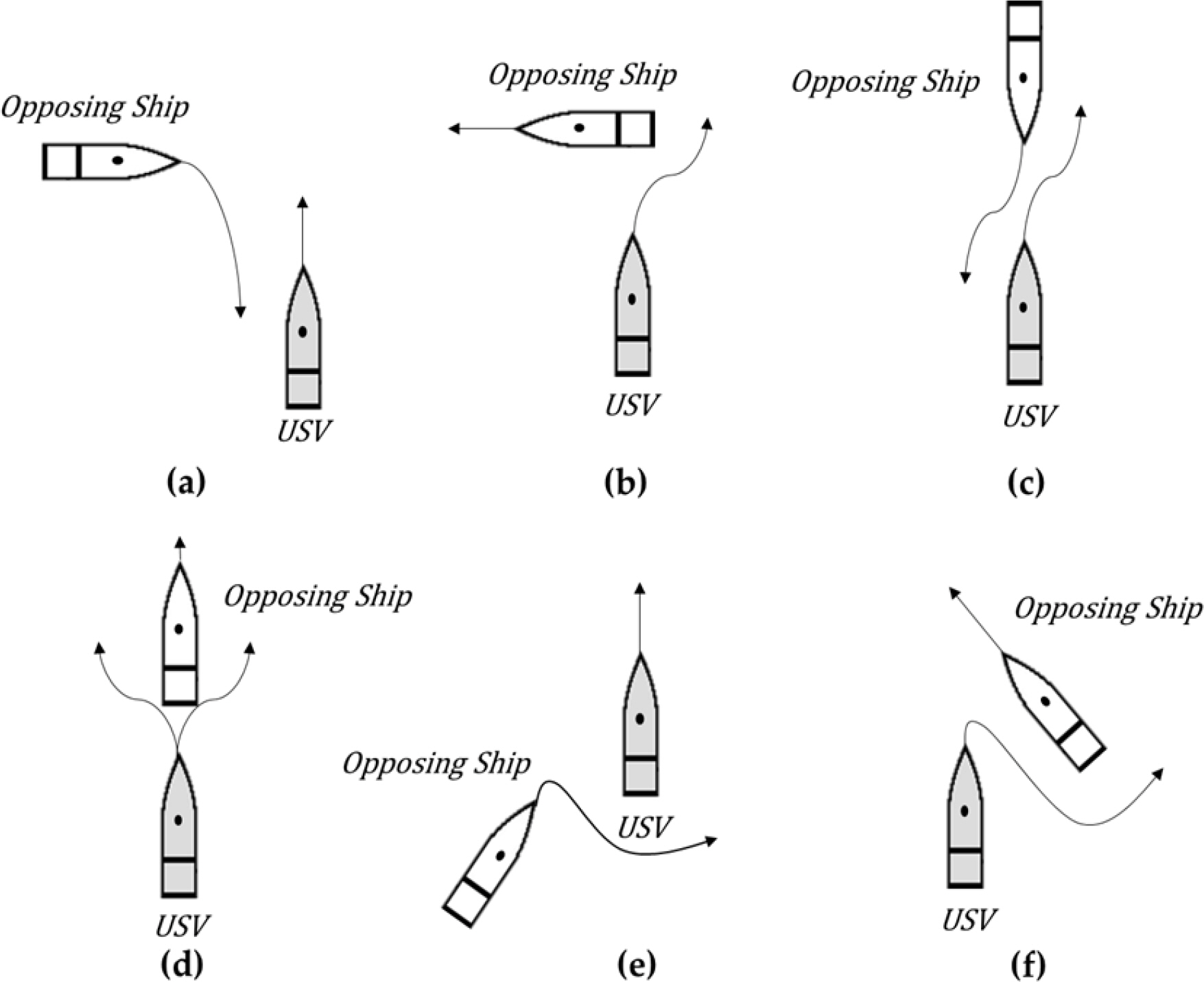
본 연구에서 COLREGs 상황은 Fig. 5에서 보듯이 타선(opposing ship)의 위치와 진행방향에 따라 다음과 같이 (a) Crossing(stand on), (b) Crossing(give way), (c) Head on, (d) Overtaking, (e) Parallel-crossing(stand on), (f) Parallel-crossing(give way) 총 6가지로 분류한다.
제안된 방법에서는 가상의 선도수상정과 타선의 위치정보로부터 COLREGs 상황을 결정할 수 있으며, 가상의 선도수상정의 dynamic window에서 각속도 범위를 제한함으로써 간단하게 COLREGs 조건에 따른 침로 변경이 가능하다. 예를 들어 Fig. 5에 (c) Head on 상황에서 타선과의 상대 위치를 알고 있다면 Fig. 6(b)에서 보듯이, 가상의 선도수상정의 좌측 각속도 범위를 비활성화시켜 w ≤ w + w ˙ m a x △ t
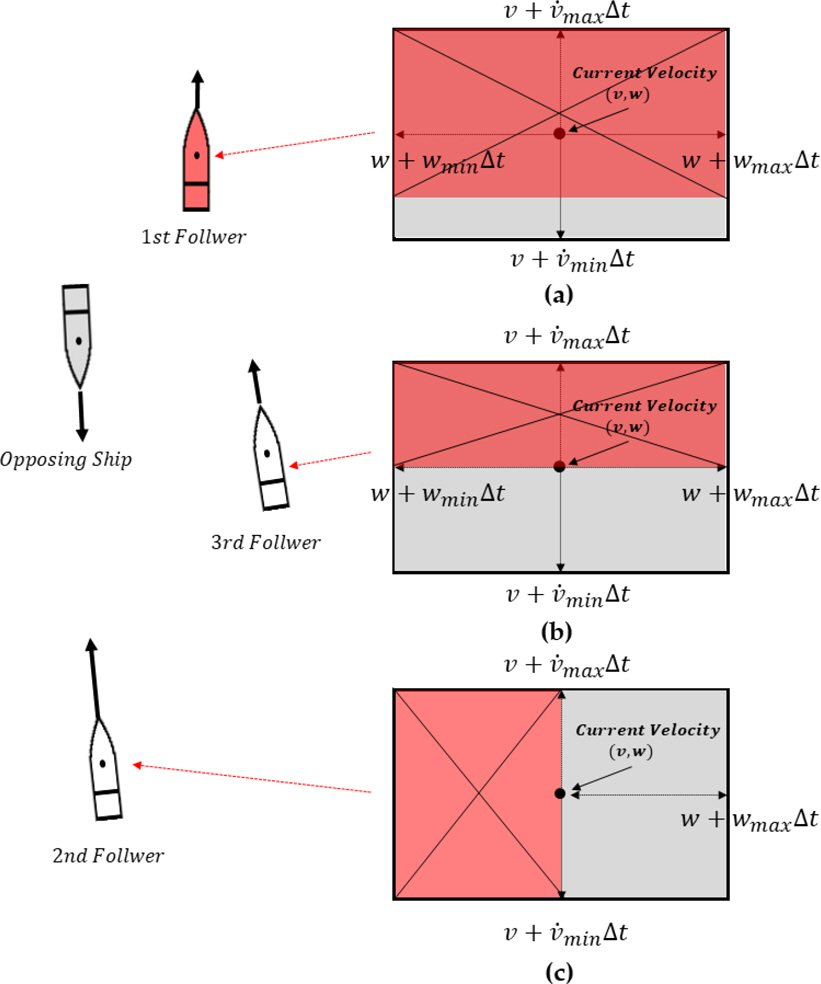
결과적으로 앞서 언급한 각속도 제어와 식 (6)과 식 (7)을 활용하여 제안된 방법에서는 dynamic window의 속도 제어만으로 COLREGs기반 충돌회피와 편대 제어를 수행한다. 예를 들어 Fig. 7은 3대의 수상정이 편대 제어 중 타선을 조우한 경우이다. 타선이 첫 번째 추종수상정을 지나 두 번째 추종수상정과 head on 상황에 놓여있고 대열에 상당히 떨어져있을 때 각각의 수상정들의 dynamic window를 보여주고 있다. Fig. 7(a)는 속도의 강한제한이 걸려 서행을 유도하고 Fig. 7(c)는 두번째 추종수상정이 COLREGs에 따른 우현 회피를 최대 속도로 수행하게 된다.
4. 시뮬레이션
본 논문에서 제안한 방법을 검증하기 위해 Unity3D 를 사용하여 시뮬레이터를 개발하였다. 본 시뮬레이터는 군집 무인수상정의 경로계획에 대한 검증 용도로 실제 해상환경에서 해류, 풍향 등 외부 간섭에 따른 선체 동역학적 요소는 고려하지 않는다. 시뮬레이션을 수행하기 전에 가상의 선도수상정과 추종수상정의 경로 계획을 위한 DWA 매개변수들을 Table 1과 같이 설정하였으며, 장애물의 경우 일정 범위 내에 접근한 경우 탐지된 것으로 간주한다.
Table 1.
Parameters for DWA
먼저 본 연구에서 개발한 시뮬레이터 검증을 위해 아래 Fig. 8과 같이 간단한 충돌회피 모의를 수행하였다. 파란색 궤적은 기존의 DWA, 빨간색 궤적은 COLREGs가 적용된 DWA를 나타낸다. 회색 궤적은 타선의 이동 궤적을 나타낸다.
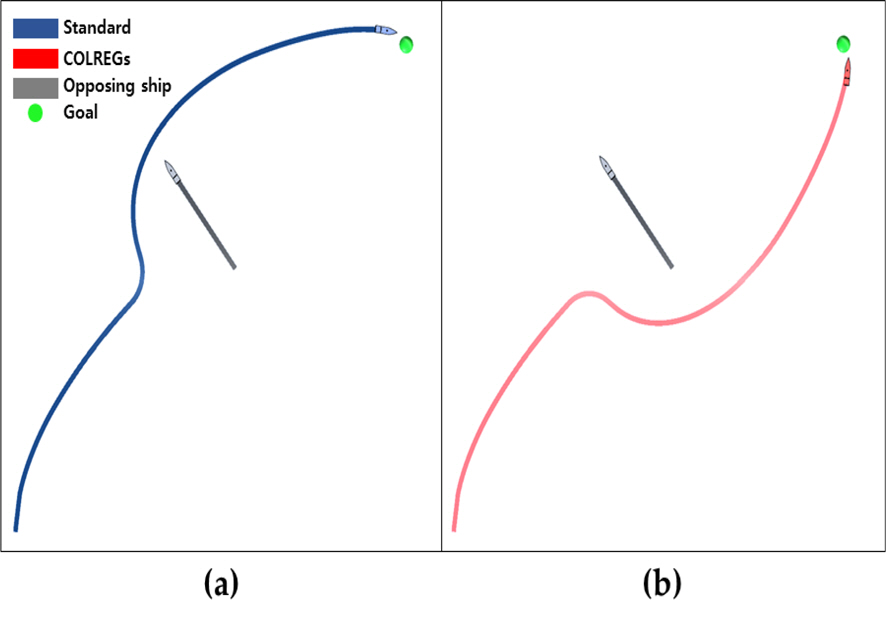
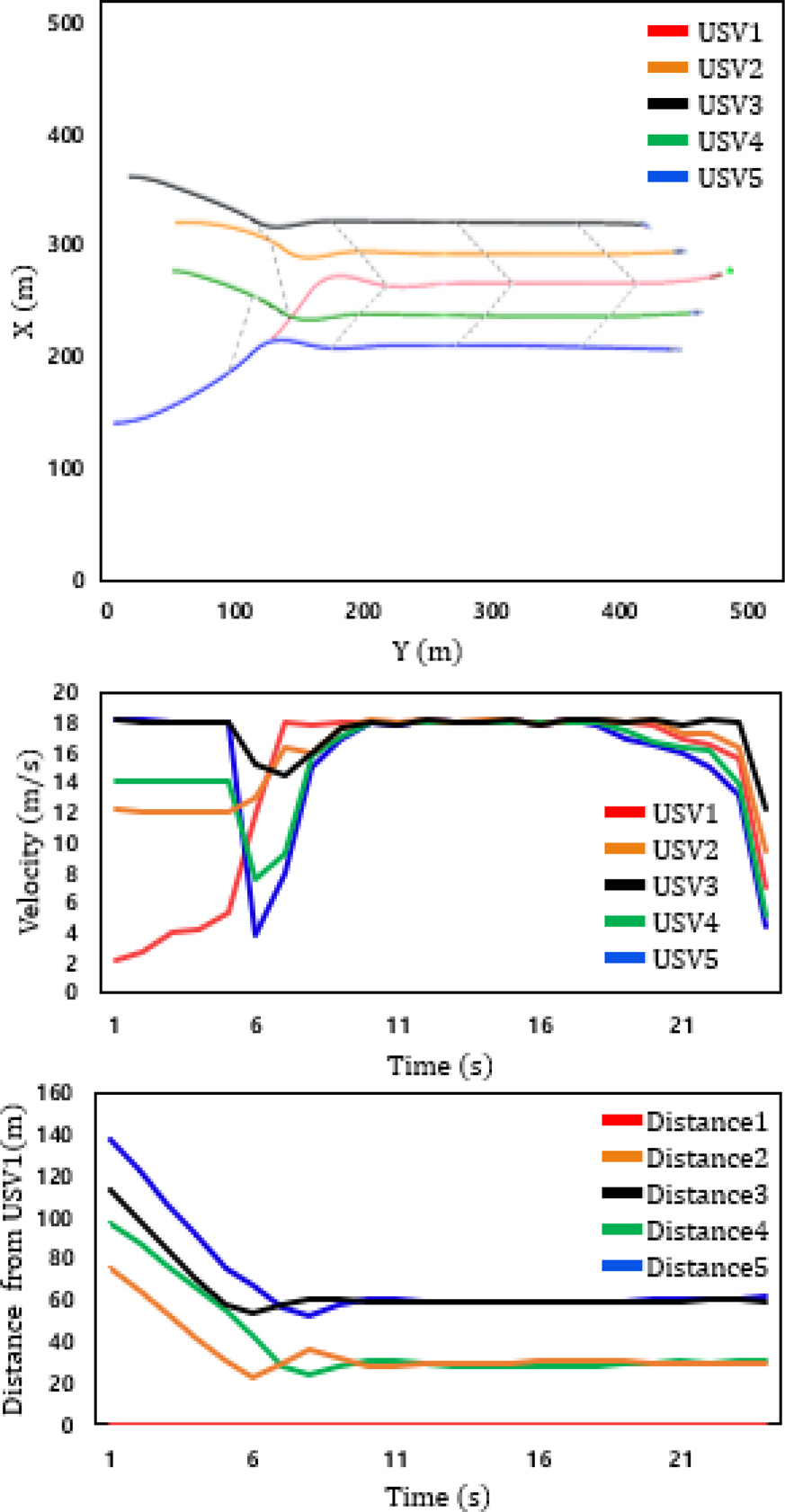
Fig. 8에서 타선이 자선의 우현에서 가로질러 가는 상황에서 기존 DWA와 달리 COLREGs가 적용된 DWA는 우현 회피를 수행하여 목적지를 향해 이동하는 것을 확인함으로써 본 시뮬레이터가 잘 동작함을 확인하였다. 다음으로 제안된 방법을 평가하기 위해 가로 500 m, 세로 500 m 맵에서 총 5대의 무인수상정에 대해 목표지점을 설정한다. 시뮬레이션은 이동 경로선상에 타선이 없는 경우와 있는 경우에 대해 진행한다. 첫 번째, 타선이 없는 경우 5대의 무인수상정이 설정된 대형을 형성하고 안정적으로 유지하면서 목표점까지 이동하는지 확인한다. 두 번째는 이동 경로선상에서 타선을 조우한 경우 COLREGs 상황에 따라 충돌 회피를 수행하는지 확인한다. 대형 유지거리는 30 m로 설정하였고 무인수상정들의 초기 위치는 일정 범위 내에서 무작위로 배치된다. Fig. 9-10은 V형 대형과 일자 대형에 따른 이동궤적과 시뮬레이션 결과를 보여준다.
Fig. 9-10은 모두 초기 위치에서 사전에 정의된 대형을 갖추기 위해 가상의 선도수상정을 추종하는 USV1을 기준으로 이동하며 대형이 갖춰지기 전까지 USV1은 저속으로 이동함을 보여주고 있다. Fig. 9에서 USV1를 기준으로 멀리 떨어져 있을수록 빠른 속도로 대형에 합류하는 것을 확인할 수 있다. 초기 가장 멀리 떨어져 있는 USV3과 USV5가 약 6초에 합류되고 편대는 V형 대형을 유지하면서 목표지점까지 이동한다. 시뮬레이션 결과에서 이동 궤적과 약 6초에서 21초까지 USV1으로부터 각 수상정들의 간격이 일정하게 유지하는 것을 통해 안정적인 편대 제어를 수행하였음을 확인하였다.

위 Fig. 10에서는 일자 대형에 따른 이동궤적과 시뮬레이션 결과를 보여준다. 약 11초까지 USV1이 대형 중심으로 천천히 이동하는 동안 나머지 수상정들은 빠른 속도로 일자 대형을 갖춘다. 마찬가지로 11초 이후부터 일정한 속도와 간격을 유지하는 것을 확인하였다. 결과적으로 타선 또는 장애물이 없는 경우 제안된 방법을 통한 편대 제어가 안정적으로 수행됨을 확인하였다.
두 번째로 타선의 위치 및 진행 방향에 따라 (a) Crossing(stand on), (b) Crossing(give way), (c) Overtaking, (d) Head on, (e) Parallel-crossing(stand on), (f) Parallel-crossing(give way) 총 6가지의 COLREGs 시나리오를 설정한다. 아래 Fig. 11과 Fig. 12에서는 각각의 COLREGs 상황에서 군집 무인수상정의 이동궤적과 타선과의 거리를 나타낸다.

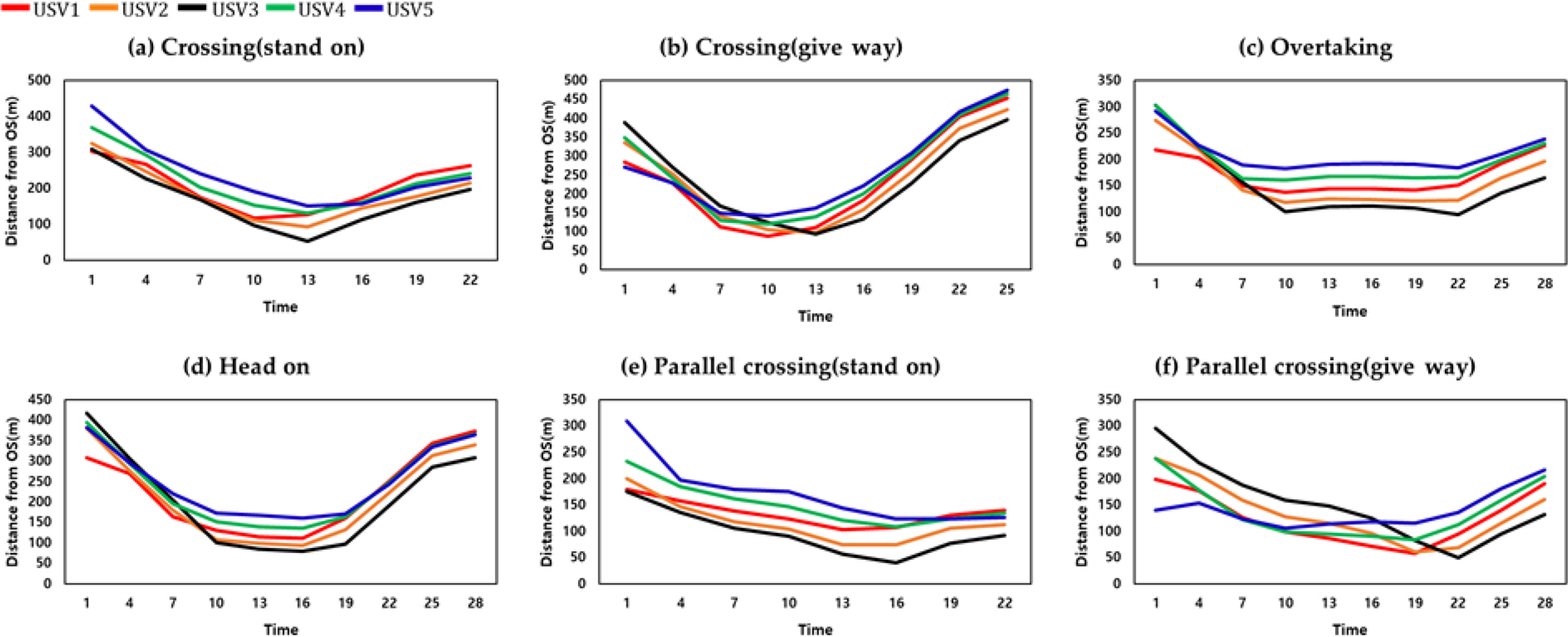
일정한 시간마다 무인수상정 편대의 위치를 연결하여 군집 이동 경로를 확인한다. 회색 궤적은 타선의 이동 경로를 나타낸다. 먼저 (a) Crossing(stand on)에서는 타선이 군집의 좌측에서 다가오는 상황으로 군집은 타선을 이미 좌현에 두고 있기 때문에 COLREGs 에 따라 기존 이동 경로를 유지하면서 목적지에 도달함을 보여준다. (b) Crossing(give way)에서는 타선이 군집의 우측에서 다가오는 상황으로 군집이 좌현 회피하지 않고 COLREGs에 따라 우현 회피를 위해 감속하여 이동함을 보여준다.
(c) Overtaking은 군집 무인수상정의 이동 경로선 상에 저속 운항 중인 타선을 우현 회피하여 추월하는 모습을 보여준다. 추월하는 상황에서는 좌우측 상관없이 회피를 수행한다.
(d) Head on은 타선이 군집 무인수상정 이동 경로선 상에 정면에서 접근하는 상황으로 COLREGs에 따라 우현 회피하는 것을 확인하였다. (e) Parallel crossing (stand on)은 타선이 군집의 좌측 후미에서 빠르게 접근하는 상황으로 (a)와 마찬가지로 현재 속도 및 방향을 유지한다. 그러나 (f) Parallel crossing(give way)는 군집의 우측 후미에서 빠르게 접근하는 상황으로 COLREGs에 따라 우현 회피를 위해 감속하면서 타선과의 안전거리 확보 후 우현 회피를 수행하는 것을 보여준다.
따라서 제안된 방법은 다양한 COLREGs 상황에서 안정적으로 대형을 유지하면서 충돌 회피가 가능함을 이동궤적과 타선과의 떨어진 거리를 통해 확인할 수 있었다.
5. 결론 및 고찰
본 논문에서는 국제해상충돌예방규칙에 따른 군집 무인수상정의 편대 제어 알고리즘을 제안하였다. 무인수상정의 운동특성을 고려한 경로 계획을 위해 DWA 알고리즘을 사용하였고 안정적으로 군집 대형을 유지하면서 이동하기 위해 가상구조와 선도-추종 방법을 응용한 가상구조 기반 가상 선도-추종 방법을 제안하였다. 또한 가상의 선도수상정의 dynamic window를 활용하여 기존의 경로계획 알고리즘에 COLREGs 조건을 추가함으로써 다양한 COLREGs 상황에서 충돌 회피가 가능함을 시뮬레이션 상에서 확인하였다. 그러나 본 연구에서 활용된 검증용 시뮬레이터는 해상에서의 풍향, 파도, 해류와 같은 외부간섭과 선체 동역학적 특성이 반영되지 않아 이러한 부분을 고려한 추가 연구가 필요하다. 따라서 향후에는 제안된 방법의 효용성을 높이기 위해 해상환경 및 선체 동역학 모델을 수립하고 모의를 통한 분석이 추가로 진행될 것이다.




