간섭계측 합성개구소나 성능 평가를 위한 해상 시험장 선정에 관한 연구
The Study of Selecting a Test Area for Validating the Proposal Specification of InSAS(Interferometric Synthetic Aperture Sonar)
Article information
Trans Abstract
This paper provides a case study of development testing and evaluation of design goal of Interferometric SAS (Synthetic Aperture Sonar) system that is developing supported by Civil-Military Technology Cooperation Center in offshore fields. For Deep water operating capabilities evaluation, We have surveyed candidate field, bathymetric mapping and target identification over 200 m depth, East Sea. In testing phase, We have provided environmental information of testing field include water column, seabed and weather condition in real time. And to compare excellency of developing InSAS, we have gather commercial imaging sonar system data with same target. This case study will support the Test Readiness Review of future underwater surveillance system developing via investigate marine testing field environment, testing facilities and planning.
1. 서 론
본 연구는 민군겸용기술로 개발된 합성개구소나의 개발시험 및 운영시험에 활용한 시험장 선정에 관한 것이다. 시험평가 기본계획은 시스템 개발 과정에서 요구된 성능지표를 확인하기 위한 필수과정이다. 시험평가의 주목적은 개발요구자 혹은 개발자 자신이 설계목표의 도달 수준을 판정하는 정보를 제공하는 것이다. 연구사업 입안시 시스템 사용자의 운영 시나리오와 요구성능을 기반하여 개발기획 단계에서부터 시험에 필요한 인력, 예산, 지원자산 등을 시험 계획 수립에 반영해야 한다. 평가는 기술구현 수준에 따라, 개발자 주관으로 이루어지는 개발시험평가와 수요자가 주관으로 수행되는 운영시험평가로 나눌 수 있으며, 이를 하나의 통합시험과정을 구성할 수도 있다. 개발시험평가는 설계 목표를 구현하기 위해 개발된 체계를 시제품이 각종 요구사항 및 규격과 상세기술 척도에 부합하는지를 검증하기 위한 기초자료를 제공하거나 기술을 확인, 위험을 예견, 운용시험 진행을 위한 준비상태를 결정하기 위해 수행하고 있다. 운용시험평가는 소요군에 의해 작전운용성능 충족여부를 확인하고, 전장상황을 고려하여 실제 사용할 운용자가 적용해야할 작전환경 및 이와 동일하거나 유사한 3계절의 조건에서 교리, 편성, 종합군수지원요소 등을 포함하여 군운용의 적합성, 운용효과 달성 정도 등을 검증하고 있다[1]. 해외의 경우, 국책연구 수행을 위한 시험장 선정 연구가 진행된 사례가 있다. 미국과 캐나다 해군의 경우, 무인체에 장착하여 다양한 임무를 수행하는 멀티빔 음향측심기의 현장 시험 성능 평가를 위해, 해상 시험장을 선정하였다[2]. 시험장 고려요소로는 시험장 고유의 지형환경, 평균 해황뿐만 아니라 부두 지원시설과의 거리 등도 고려해야한다. 특히 음향측심 장비의 경우, 목표물 탐지능력 및 탐지된 목표물 위치 정보에 대한 수직 및 수평 해상도 평가를 위해 크기가 다른 복합 목표물을 수중에 거치하여 시험장을 구축해야한다.
한편, 본 연구의 시험대상인 합성개구소나는 사이드스캔 소나(Side Scan Sonar)의 일종으로 해저면 구성체의 음향임퍼던스 차이를 영상화하는 탐색 장비이다. 최근에는 사이드스캔 소나 송수파기를 복수개 장착하여, 해저면 영상과 해저지형의 3차원적 기복을 동시에 취득하기 위한 변형 사이드 스캔 소나 즉 인터페로메트리(interferometry sonar) 소나가 개발되어 활용되고 있다. 그리고, 사이드스캔 소나의 선수방향(along-track direction)공간 해상도는 송수파기의 물리적 길이와 예인속도에 종속되며, 현방향(across-track direction) 해상도는 주파수에 종속된다. 송수파기의 길이가 길수록 빔폭이 좁은 음향 빔을 합성해 될 수 있는데, 물리적 한계를 고려하여 너무 긴 송수파기는 구현하기 어렵다. 일정한 각도로 퍼지는 음향 빔은 거리에 따라 공간해상도가 나빠지는데, 이런 방사되는 빔 특성을 보완하고, 선수방향 해상도를 거리에 무관하게 유지하기 위한 방법이 고안되었다. 이를 합성개구소나(Synthetic Aperture Sonar, SAS)라 하며, 동일 주파수를 사용한 전통적인 사이드스캔 소나보다 주사폭은 넓고, 공간해상도가 좋은 영상을 제공하고 있어 현재 주목받고 있는 기술이다. 위성레이다 시스템에서 먼저 개발된 합성개구 신호처리 기법은 송수신 센서를 이동하면서 여러 위치에서 취득한 데이터를 동시에 활용하여 물리적인 센서의 구경(aperture) 크기보다 더 큰 배열 구경 효과를 가져 옴으로써 영상 해상도를 높이는 방법으로서 능동형시스템 뿐만 아니라 동일한 원리로 수동형 시스템에 대해서도 적용 가능하다[3]. 이론적 연구는 1970년대부터 실시되었으나, 매우 많은 연산량 때문에 상업 제품으로 구현되는데 어려움이 따랐다. 그러나 2000년대 전산시스템의 비약적 발전에 힘입어 상업적으로 시스템이 개발되어 활용되었다[4]. 국내에서도 합성개구소나에 대한 연구는 2010년대에서부터 진행되었고[5], 다양한 이론적 연구에 기반하여, 시제품 개발 단계까지 도달하였다[6,7].
합성개구소나 시스템은 기존 사이드스캔 소나에 비하여, 정확한 안테나의 움직임에 대한 정보에 기반하기 때문에, 취득 신호의 정확한 위치를 확보할 수 있는 장점이 있다. 또한, 합성개구소나 시스템의 원 개발 목표인 거리에 불변하는 공간해상도 확보라는 성능을 만족하기 위하여, 여러 가지 영상화 알고리즘이개발되고 있다. 영상과 해저면 기복 정보를 동시에 제공하는 간섭계측 합성개구소나(Interferometric Synthetic Aperture Sonar, 이하 InSAS)의 핵심 성능 기준은 탐지거리와 분해능이다. 소나 시스템의 목표물 검출 성능은 빔 형성 방식(FM, AM)에 따른 영상 해상도 비교,탐지거리에 따른 영상 해상도 비교 등 해상시험을 통해 평가되고 있다[8].
개발된 소나 시스템의 성능 평가는 구현 시스템의 설계 모수로부터 추정될 수 있으나, 이를 현장 검증을 통해 확정하는 개발시험평가가 필요하다. 시스템 각부 기능 및 성능 시험을 위한 현장의 자연 환경은 제어될 수는 없으나, 환경에 대한 다각적인 정보 수집과 인위적 환경 구성을 통해 시험 환경을 구성할 수 있다.
본 연구에서는 개발 중인 InSAS 시제에 적용된 다양한 알고리즘 기반 영상화 시스템의 해상도 평가를 위해 실해역 시험 계획과 수행결과를 제시한다. 본 논문은 개발된 InSAS시스템의 기능 및 성능 평가를 위해 수행한 현장시험장 설계 및 환경조사를 경험을 토대로 소나 시험 환경에 고려해야 할 사항들을 검토하였다. 2장에서 개발시제 평가를 위한 성능 지표와 시험장 조건을 소개하고 3장에서 현장시험장 선정 및 시험장 환경정보 취득결과를 제시하고 4장에서는 소나 시스템 성능 분석을 위한 현장 시험장에 대하여 고찰하였고, 마지막으로 결론으로 구성하였다.
2. InSAS 소나 성능 평가 지표
음향을 기반으로 한 영상화 시스템의 성능은 다양한 요소의 정성 및 정량적 수치로 평가된다. 예를들어, 탐지거리(Swath Range), 운영심도(Operating Depth), 영상분해능(Spatial Resolution), 운영속도(Operating Speed)는 시스템의 핵심적인 성능을 나타내는 항목이다. 개별 운영 성능은 시스템 설계 시 목표 성능으로 제시되어 있으며, 모든 구성품이 이를 구현하기 위하여 고려되었음을 전제한다. 그럼에도 불구하고, 시스템으로 구현되었을 경우에는 개별 성능 간의 영향관계 등에 의하여 특정 운영 환경에서만 성능을 만족하는 경우가 나타날 수 있다. 개발된 소나 시스템의 주요 성능을 파악하기 위하여, 수중 목표물에 대한 정보를 정확히 알고 있어야 한다. 기능 및 성능 평가를 수행하기 위한 환경조건과 수중목표물 정보를 포함하여 시험준비상태(Test Readiness)가 검토되어야 한다.

Interferometric synthetic aperture sonar on the deck of RV Eardo, KIOST(Korea Institue of Ocean Science and Technology)
2.1 영상탐지용 InSAS 시스템 현장시험장 조건
영상탐지용으로 개발한 InSAS 시스템의 목표 성능을 검증하기 위해서, 각각의 성능을 검증할 수 있는 조건을 갖춘 현장정보를 확보해야 하는 것은 시스템 개발과정에서 중요하다. 실 해역의 기상 상황, 개발된 시제를 안정적으로 운영할 수 있는 모선 조건, 탐지성능을 확인할 수 있는 인공구조물 등의 제반 조건이 만족해야 한다. 해양에서 진행되는 시험평가는 고가의 연구선을 사용해야 하고, 항구를 벗어나 시험조건이 갖추어진 특정해역을 찾아 수행해야 하며, 예측불확도가 높은 기상 조건 하에서 실행해야 하는 어려움이 있다. 또한, 해양 특히 수중에서 작동하는 제품 개발에 있어 인양 및 진수 시의 충격 등에 민감하기 때문에, 안전하게 장비를 진회수를 할 수 있는 연구보조 장비가 필수적으로 구축되어 있어야 한다. 미 해군의 NAVOCEANO와 캐나다 수로국(CHS)에서는 소나 장비의 현장 기능 시험 평가를 위한 시험장 선결조건에 대한 검토를 하고, 목표물 탐지 성능 평가를 위한 인공구조물의 제작 투입을 시행한 사례가 있다[2].
Table 1은 해상시험장 선택시 고려해야 할 항목들과 본 시험에서 검토한 내역을 정리한 것이고, Table 2는 해상시험평가장에 대한 계획 수립 및 현장 시행시에 필요한 환경정보를 정리한 것이다.
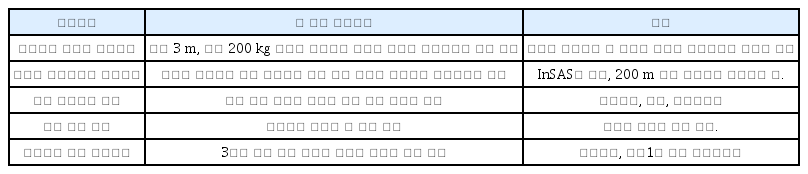
Considering items of offshore test field for underwater mapping system

Providing oceanographic information of offshore test field
3. 현장시험장 선정 및 평가자료 구축
InSAS의 주요 목표성능으로, 운영심도 200 m 이상에서의 작동, 주사폭(Swath Width) 500 m, 해상도 3 cm 이며, 개별목표성능의 구현을 확인하기 위하여 시험 조건에 맞는 시험장을 선별하였다. 수심 200 m 이상에서의 기능/성능 확인과 주사폭 평가를 위해서 수심 200 m 이상에 존재하는 목표물의 선정이 필요하다. 이를 위해 해양수산부에서 구축한 침몰선박 DB를 조회하여, 항구와 가장 가까운 해역에 존재하는 경북 왕돌초 남쪽의 침몰선 주변을 시험장으로 선택하였다. 그리고, 영상해상도 평가를 위해서 고안한 인공구조물의 안전한 설치와 회수를 위해 수심이 낮고 정온한 환경의 거제 칠천도 해역을 선정하였다.
운영심도 성능 평가를 위한 인공 목표물은 2000년 8월 8일 충돌사고로 침몰된 우양블루호가 선정되었다. 우양블루호는 1982년 진수된 총톤수 2,180톤(L80.11 m × B14.00 m × D8.40 m)의 화물선으로, 동경 129°49′05.20″, 북위 36°25′05.74″ 지점에서 침몰했다[9]. 해난심판원의 기록을 근거로, 목표물로 지정한 우양블루호의 절대 위치와 주변 해저지형의 복잡도를 확인하기 위하여, 2020년 4월 8일 한국해양과학기술원 보유 연구선 이어도호에 장착된 Konsgberg사의 EM710(100 kHz) 멀티빔 음향측심기로 기록상의 주변해역을 수색하였다.
Fig. 2 (a)는 운영심도 기능 및 성능 시험 평가를 위한 시험장 해저지형이다. 동서 및 남북 약 4 km 정방형 영역이며, 동서방향 지형경사는 2.6°로 북서측 170 m 에서 남동측 400 m까지 수심이 깊어지는 지형이고, 탐색목표물 이외에는 특이한 인공물 및 자연지형이 존재하지 않는 평탄한 해역이다. 수심이 낮은 지역은 적색, 청색은 수심이 상대적으로 깊은 지역을 의미한다.
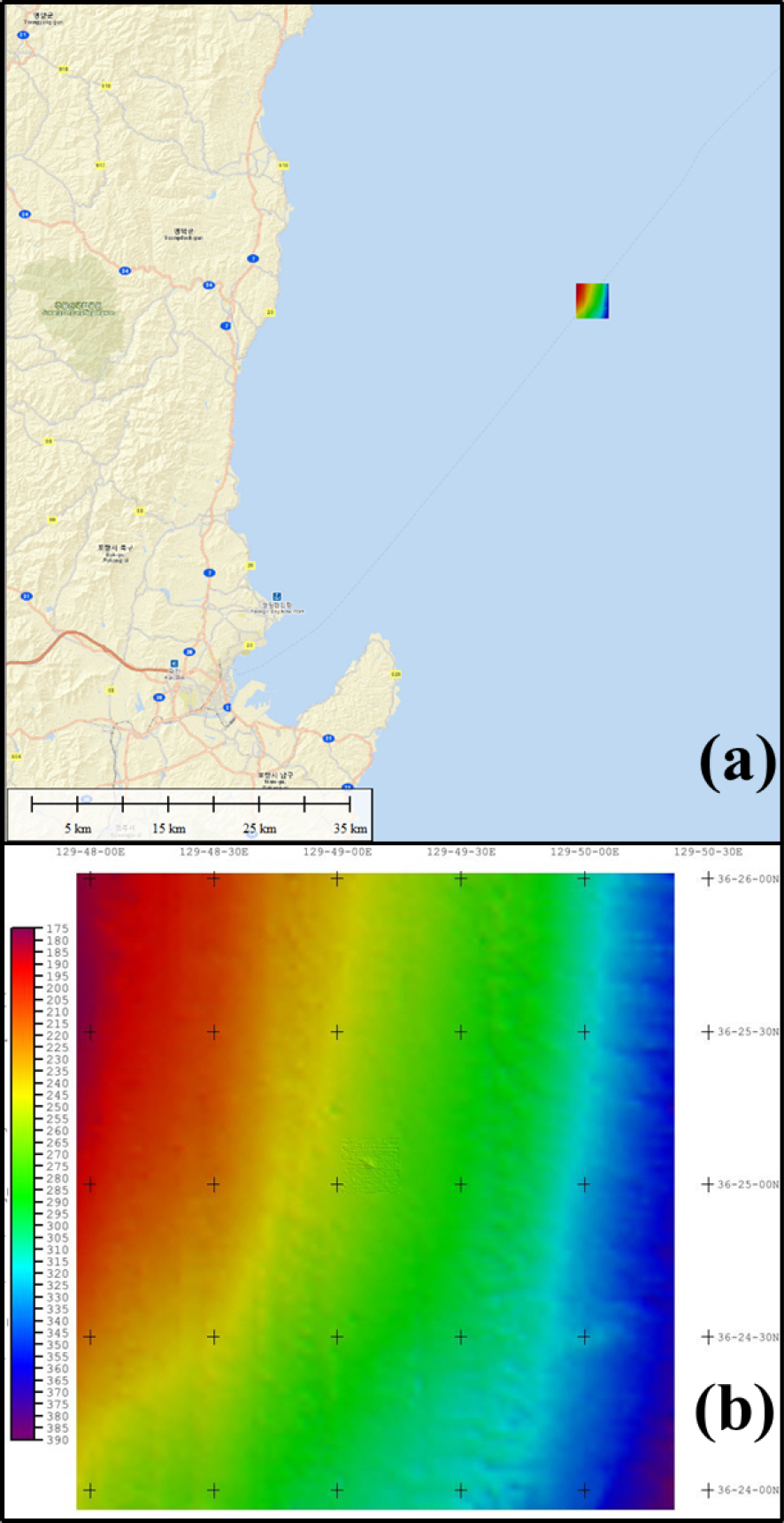
Deep sea test field for InSAS development test phase. (a) is a index map of pohang test field, (b) is bathymetric map of test field. Red color on bathymetric is shallow area and blue color represents deep area
Konsgberg사의 EM710(100 kHz) 멀티빔음향측심기로 확인된 우양블루호의 선미 위치는 36°25′5.06″ N, 129°49′6.21″ E이었으며, 길이 약 81 m임이 확인되었다. 본 해역은 동서방향 지형경사는 2.6°로 동쪽으로 진행해가면서 점점 깊어진다(Fig. 3). 침선은 경사면을 따라 선수가 동쪽에 선미가 서쪽으로, 북서-남동 방향으로 놓여 있다. 수심 측정 결과 선수부분 해저면 수심은 263 m, 선미의 해저면 수심은 260 m로 측정되었으며, 해저면의 요철이 거의 없는 평탄해저면에 오직 침몰선 하나만 존재하고 있어, InSAS의 운영심도 평가 및 탐지거리 평가를 위한 기능시험장의 조건을 충족하였다. Fig. 3. (a)에서 침선과 침전 주변 지형에 대한 3차원 모델을 보여주고 있으며, Fig. 3. (b)에서는 InSAS 개발시제에서 취득한 우양블루호의 소노그램 영상을 보여주고 있다. 이때 InSAS 예인체는 해수면 하 202 m, 해저면 상 65 m에서 예인되고 있었으며, 우측 탐사 레인지는 250 m이었다.

An underwater target for capability testing of InSAS. (a) 3D model of M/V wrecked wooyang blue by multibeam echo sounding. The subset photo on bethymetric model is a photo of M/V wooyang blue before sinking. (b) Sonogram of M/V wooyang by InSAS
수중무인이동체 혹은 수중예인체의 조향 및 추진 특성을 파악하기 위해서는 수심별로 특성이 다르게 나타나는 유속장의 파악이 필요하다. 수심별 유향과 유속을 실시간 관측하기 위하여, 본 연구에서는 시험기간 동안 연구선 선저에 부착된 도플러 음향유속계(Teledyne RDI-ADCP 150)를 이용하여 유향과 유속을 관측하였다(Fig. 4).
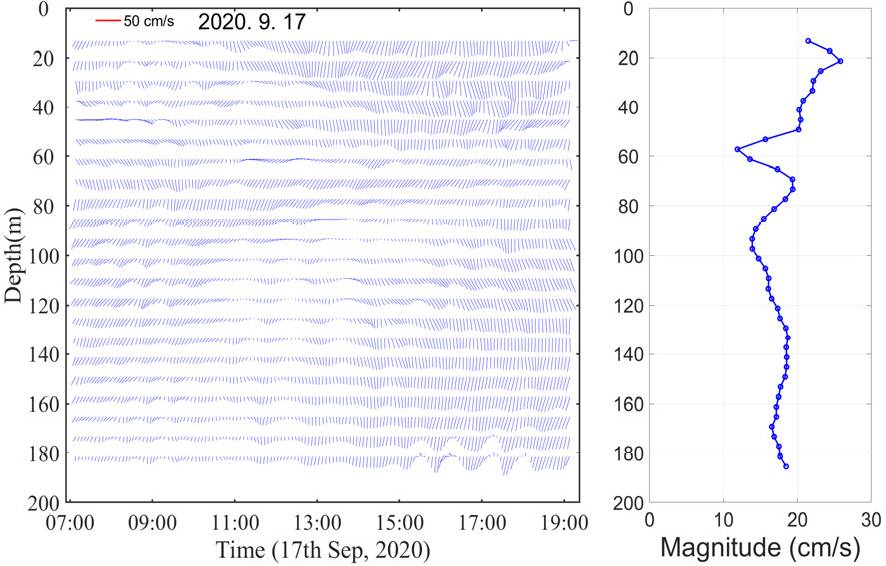
Underwater current profile at offshore test field during InSAS 2 nd development test. Left panel is time plot at each depth upto 200 m. Right panel is average speed during observation periods
2020년 9월 17일 07:00~19:00(Fig. 4 좌) 동해 시험현장의 유속을 보면 표층유속은 측정초기에는 약 20 cm/s 이하로 약하게 흐르다가 12:00경부터 점차 증가하여 15:00경에 38 cm/s 이상의 강한 유속이 나타났다. 같은 해역이라도 시간대에 따라 유속장 환경이 변화함을 알 수 있다. 또한 측정 시간 동안 층별 해수유동 평균을 구하였으며(Fig. 4 우), 수심 약 21 m에서 25 cm/s로 최대가 나타났고, 수심 약 57 m 부근에서 약 11 cm/s로 최소값을 보였으며, 수심 60 m부터 저층(수심 180 m)까지는 13~19 cm/s 범위로 분포하였으며 수심에 따른 유향의 변화는 없었다. 측정된 최대 유속 값을 기준으로 천해역 시험장 가능성을 평가하면, 예인체 이동 제한 속도(3노트)보다 시험장의 유속이 작아 시험장으로서 양호한 조건을 갖추고 있다.
유속장 뿐만 아니라, 최적 운영심도 기준을 확인하기 위한 수직음속구조를 파악하는 것도 중요하다. 최적 운영심도 기준을 확인하기 연구선에 설치된 SBE 911plus CTD를 사용하였다. 동해 시험 평가장에서 측정한 CTD 결과를 보면(Fig. 5), 적색선은 수온, 녹색선은 음속, 청색은 염분이며, 갈색선은 수심에 따른 밀도의 변화를 의미한다. 관측 결과 표층부터 수심 50 m 까지 표층혼합층이 나타나고, 수심 50 m부터 해저면까지 완만한 경사를 가지는 수온 약층이 형성되어 있다. 만약 수중예인체가 수온약층에 위치한다면, 음파가 대부분 산란되어 해저면 탐사에 제약이 발생할 수 있다. 따라서 수중예인체는 수온약층에서 발생할 수 있는 음향 산란을 피할 수 있는 수온약층 아래(수심 100 m 이심)에서 운영하는 것이 효율적이다. 해저면 영상을 획득하기 위해서는 음향 산란층인 수온약층의 시작 심도를 파악하는 것이 중요하며, 본 시험 실시 실시단계에서는 이를 반영하여 수행하였다.
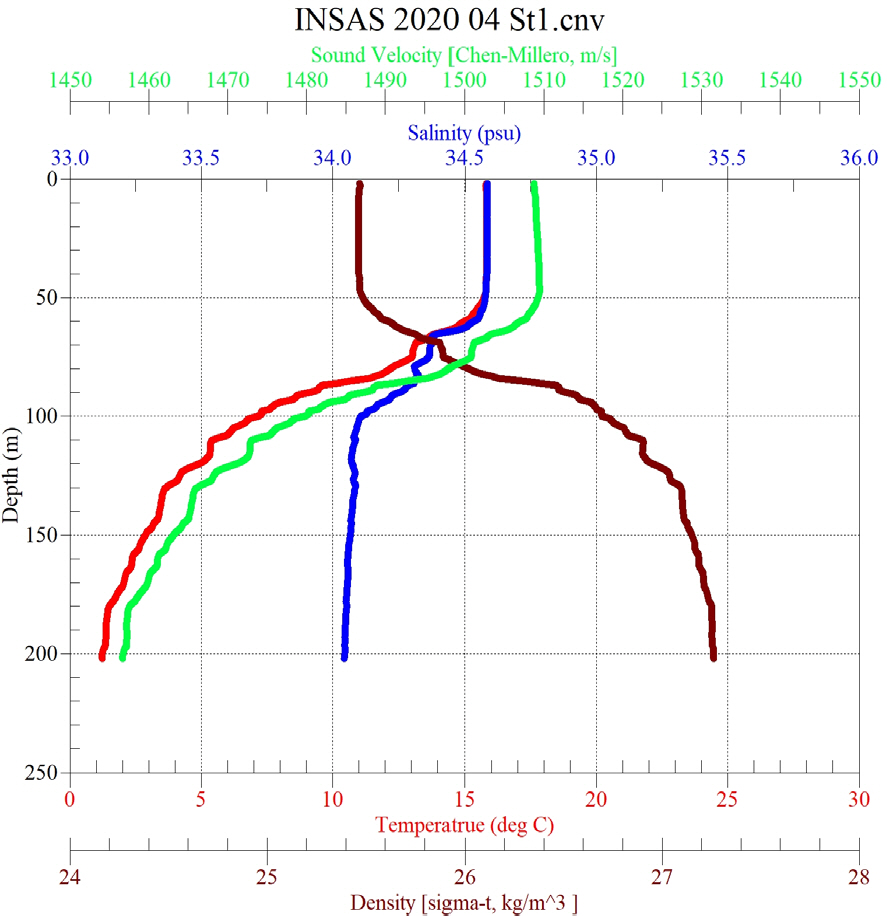
CTD observation result for decision of optimum operating depth of InSAS. The red plot is water temperature, the green is sound speed, the blue is salinity and the brown is density of water
수심 200 m 이상의 해역은 국내 서남해에는 존재하지 않으며, 동해에서도 육상에서 수십 km 이격된 대륙붕 외해지역이라, 기상 및 접근성이 제한된다.
천해역 시험장은 기상에 따른 현장시험의 제약에서 자유롭고, 부두와 인접하여 개발기간 동안 단계적 기 능구현 결과를 확인하는 장소로 활용된다. 천해역 시험장은 항로, 어로구역 및 양식장 등 시험 방해 요소가 배제된 지역이여야 하며, 굴곡이 없는 평탄하면서도 특징적인 목표물이 존재해야 한다. 이를 위해 한국해양과학기술원 남해연구소 부근 거제 칠천도 서측 해역의 인공어초 설치 지역을 멀티빔 음향측심으로 탐사하고(Fig. 6a), 강제시험어초가 설치되어 있는 수심 20 m 해역, 가로와 세로 모두 200 m 구역을 시험장으로 설정하였다(Fig. 6b).
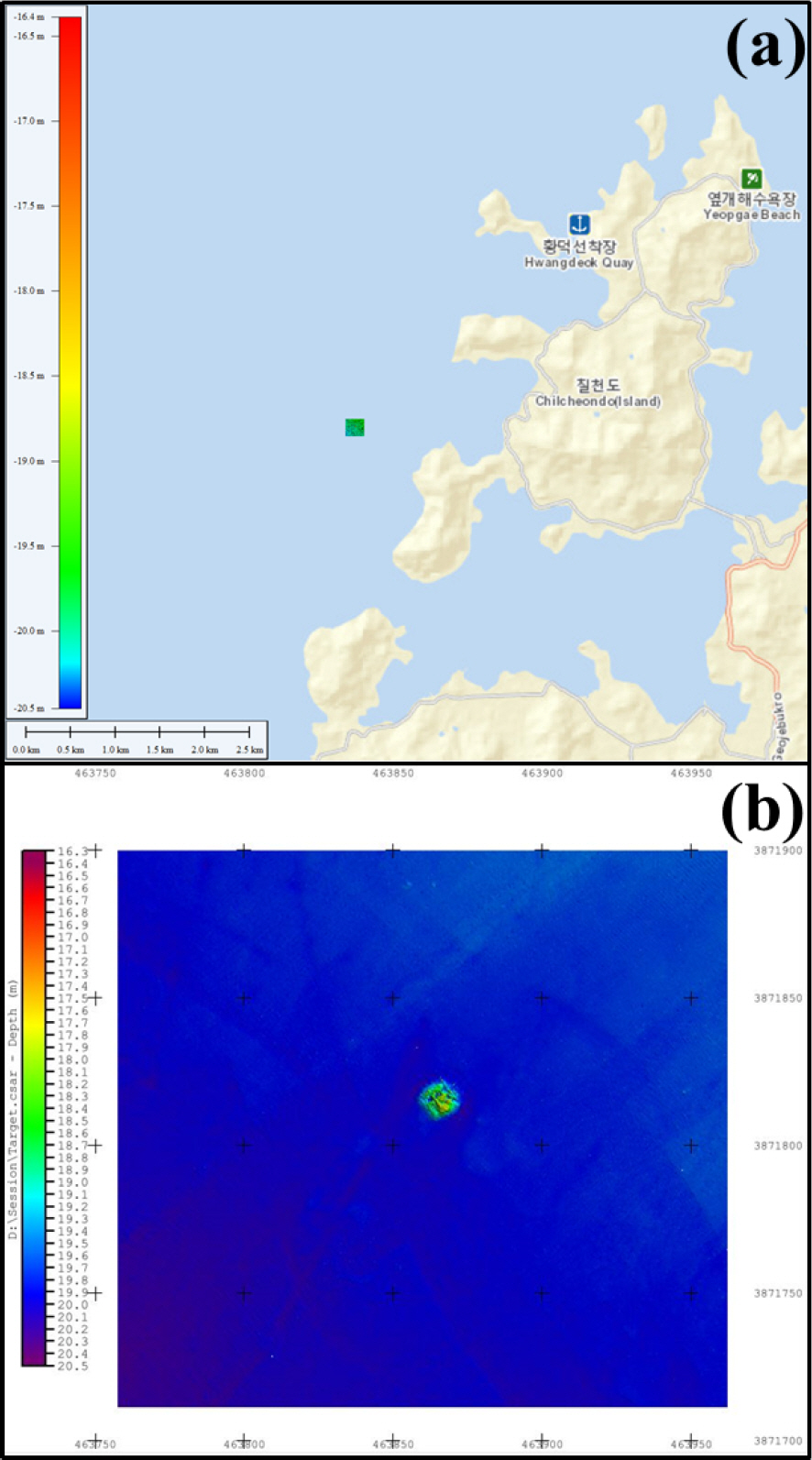
Shallow test filed for InSAS development test Phase(34°59′18.024″ N, 128°36′14.688″ E). (a) is index map of Geoje test field and (b) is bathymatric map of test field
Fig. 7은 InSAS 개발 시험평가를 위한 천해 시험장 해역에 설치된 상자형 강제어초(34°59′18.024″ N, 128°36′14.688″ E)는 가로 9 m (W) × 세로 × 9 m (L) × 높이 10.2 m (H)의 철로 제작된 어초로, 해저 20 m 바닥에 설치되어 있다[10].

Underwater target under shallow test field. Underwater target is artificial reef that was made of steel. Target dimension is 9 m (W) × 9 m (L) × 10.2 m (H). (a) is photo of steel artificial reef and (b) is water column imagery by multibeam echo sounder
InSAS의 일반적 장점은 기존 사이드스캔 소나에 비교하여 동일 주파수 대비 높은 해상도이다. 이를 평가하기 위하여, 미 해군에서 운용중인 3가지 타입의 모형 기뢰를 제작하고(Fig. 8), 시험 해역에 투입하여 해상도 시험의 목표물로 활용하였다. 모형 기뢰의 설치 후 기존 사이드스캔 소나(미국 Klein사의 System 3000 (445 kHz))를 통해 개별 모의기뢰의 설치위치 및 해상도를 평가하기 위한 대조영상을 취득하였다.

Comparison dataset and artificial target for targeting capability test of InSAS system. Upper panel is a mosaic imagery by klein 3000 system. Down panel show the dummy mine for test
InSAS의 경우, 동일 기능을 수행하는 기존 상용 사이드스캔 소나와 품질 비교 평가 또한 필요하다. 이를 위해 개발중인 InSAS 시스템(Fig. 9c)의 해상도 비교를 위해 미국 Klein사의 System 3000(445 kHz)(Fig. 9a)과 Kongsberg Maritime사의 EM710(100 kHz) 멀티빔 음향측심 후방산란 영상(Fig. 9b)을 비교하였다. Table 3은, 해상도 비교에 사용한 상용 장비의 주요 제원이다.
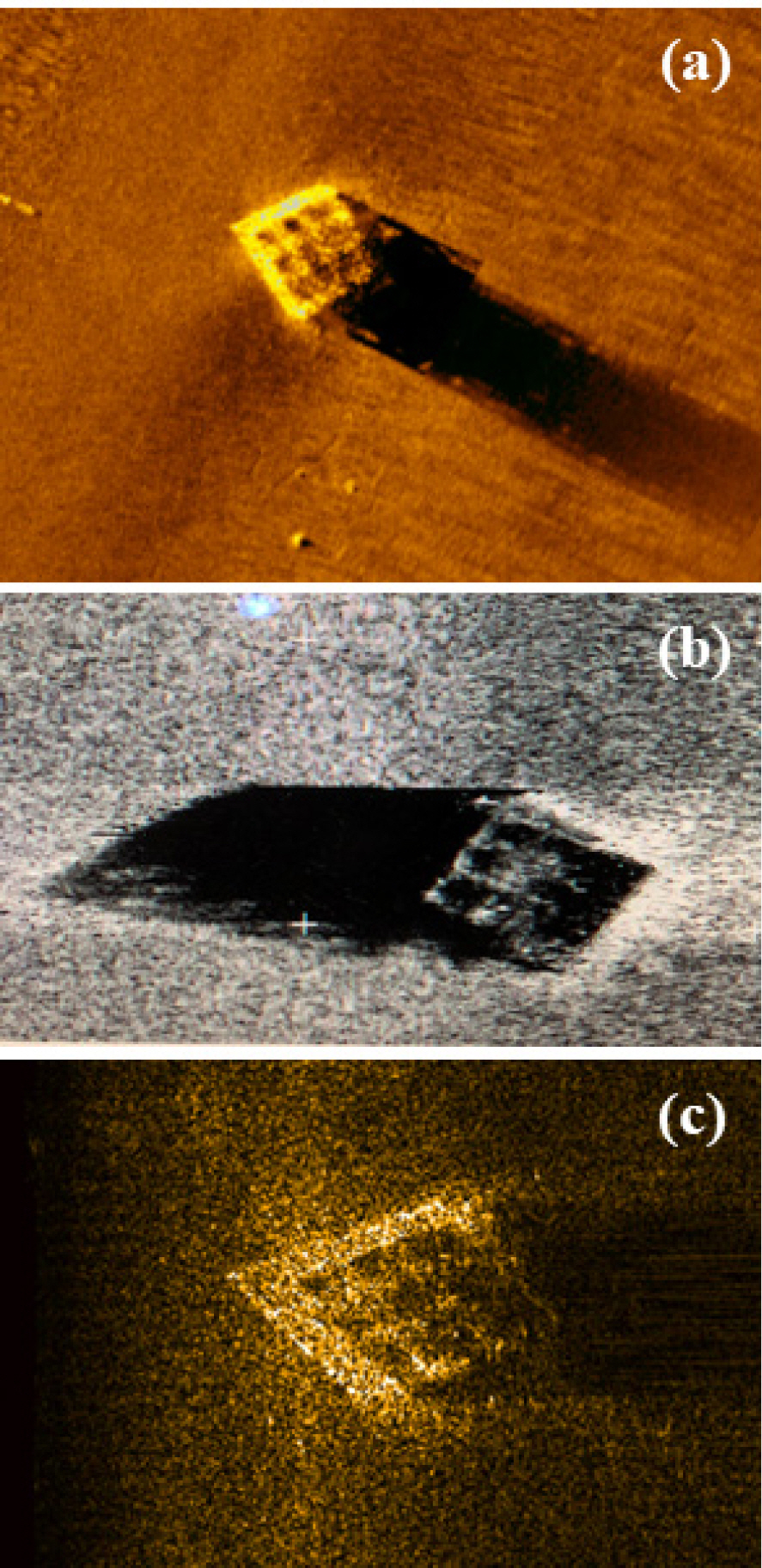
Comparing sonar imagery dataset for artificial reef target (a) traditional side scan sonar imagery (Klein System 3000) (b) backscatter imagery of Multibeam echo sounder (KM EM710) (c) InSAS imagery

Major Specification of comparison systems
단일 빔 형성 방식에서는 해상도를 높이기 위해 수평 빔 각도(Klein Sonar의 경우 0.2°)를 최대한 좁혀야 하나, 합성개구 소나에서는 연속된 빔을 이용하기 때문에 수평빔 각도(8°)가 크지 않아도 기존 시스템과 유사한 해상도를 도출할 수 있다. 음향을 이용한 영상탐사 시스템에는 다양한 구현 방식이 적용될 수 있으나, 영상의 선명성을 기준으로 목표물 탐지 가능성과 탐사 폭 효율이 주요 비교제원으로 활용된다.
4. 고 찰
개발 장비의 시험평가는 최종 연구개발 목표 달성을 위해 중요한 고려 사항이다. 해상시험장은 수요기관의 개발장비 요구성능과 운영주체의 운영 시나리오에 맞추어 준비되어야 하기 때문에 개발 초기 계획입안 단계에서부터, 개발시험평가 및 운영시험평가를 위한 평가단 및 시험지원자산 등을 고려한 시험평가기본계획서에 반영되어야 한다. 육상이나 공중 체계와 달리 수중 체계의 실험은 대형 시험선을 동원해야 하는 경우가 대부분이므로, 시험비용 자체가 전체 개발비용에서 차지하는 비율이 높다. 일례로 이번 InSAS 개발 시제 개발 단계에서 최대 운영 수심 200 m를 확인하기 위한 시험장 선정과 평가에 전체 연구비의 약20 %가 소요되었다.
이는 체계도입을 위한 시험평가에 비해 적은 비율이지만, 연구개발 단계임을 고려하면, 상당히 높은 수준이고 연구개발 계획시점부터 효율적으로 관리되어야 할 것이다. 시험을 위한 시험선 자체의 선정 또한 중요 고려사항이다. 해상시험에 동원해야 하는 선박은 보통 연간 운영계획을 가지고 있기에, 단계별 개발완료 및 평가시점을 예상하고, 가용한 기간 또한 사전에 계획되어야 한다. 본 연구사업에서 수행한 InSAS 개발시제 평가에서와 같이, 운영심도 평가를 하기 위해서는 해당 심도 이상의 예인케이블을 동적으로 운영할 수 있는 윈치와 A-Frame 등, 진회수를 위한 부가장비의 탑재여부도 연구선 선정 시 확인되어야 한다. 본 연구에서 선정된 해상시험장은 개발장비 운영심도에 적합한 수심 범위, 지형의 형태, 퇴적기반 정보, 수중 목표물의 정확한 위치와 형상이 확보된 물표, 수중을 채우고 있는 해수의 물리적 특성, 예를 들어 수층별 음속, 탁도 및 해류 방향과 속도 등을 별도의 탐사를 통해 확정하였다.
수중 탐색 시스템의 성능 평가는 특정 목표물을 기반으로 이루어진다. 이를 위한 목표물은 3차원 위치 정보와 형상 정보가 알려진 인공제작물이나 시설, 예를 들어 심층수 배관, 동해가스전 주변 송유관 시설, 침몰선 등이 가능하나, 시설보호 및 위치의 불확정성 때문에 이들에 대한 현장 조사가 필수적이다. 본 연구에서는 국립해양조사원에서 간행하는 항행통보 자료를 기반으로 수중 목표물 후보군을 선정하였고, 선정된 3군데의 후보 정점에 대하여 연구선을 이용하여 지구물리 및 해양물리조사를 수행하였다. 운영심도 기능 시험의 조건으로 200 m 이상 수심에서 InSAS를 작동시켜 영상이 생성되는 가를 확인해야 하는데, 수집된 영상 자료를 통해 해당 위치에서 동일한 물표의 영상이 나타나는지를 Fig. 3과 같이 확인 할 수 있었다. 해상시험장은 운영 가능한 시험선 기항지로부터 최대한 가까워야 하며, 이를 통해 시험선 운영 시간과 실험시행자의 피로도를 최소화 할 수 있는 해역을 선정해야 한다. 최종시험평가가 아닌 개발 단계에서도 단위기능의 구현성능 확인을 위한 일상적인 실험을 위해 해황 영향을 덜 받는 시험장 확보가 필요하다. 본 연구개발 단계에서는 연구기지와 가깝고, 지형적 영향으로 해황의 영향을 덜 받는 거제도 북측 해안을 선정하여 개발단계에서 식별해야 하는 요소들을 안정적으로 취득할 수 있었다.
InSAS와 같은 수중체계 개발에 있어, 해양물리 특성 파악은 시스템이 가진 환경인식 센서 및 이를 입력으로 하여 제어되는 시제 항법 알고리즘의 특성을 파악하는데 필수적이다. 예를 들어, 2020년 9월 17일 동해 시험현장의 유속 측정결과와 같이 동일해역이라도 수심대역에 따라 유속이 다르다는 현장 정보는 구현된 제어 시스템의 외력 평가에 정량적 요소로 알고리즘 성능 개선에 실질적 도움을 제공한다. 또한, 수온약층의 심도를 실시간 파악하여 점차 증가하는 해상시제 개발시험평가 및 운영시험평가 등에 대비하여, 민군겸용 기술 개발을 위한 해상시험장에 대한 국가적 설치운영을 고려해 보아야 한다. 개별 연구 사업에서 시험장을 준비하기 위해 예산을 투입하기보다, 연구수행기관과 수요기관 공통의 이해를 위해 수중지질 및 물리환경과 해황을 실시간으로 제공하고 어업 행위 등의 외란을 배제할 수 있는 동서남해 해상 시험장과 시험평가선의 항구적인 확보와 운영이 필요하다.
5. 결 론
간섭계측 합성개구소나 개발시제의 성능평가를 위한 해상시험장 선정 및 시험환경 측정에 대한 연구를 수행하였다. 개발시제의 목표 제원의 자체 평가를 위한 근거리 천해 해상시험장과 심도에 따른 운영성 평가를 위한 200 m 이상 해역에 존재하는 인공목표물이 있는 해역을 원거리 해상시험장으로 선정하였다. 문헌상으로 보고된 시험장 내 인공목표물의 실제 위치와 형상을 파악하기 위하여, 멀티빔 음향측심기와 InSAS 를 이용하여 실제 정보를 취득하였고, 시험 기간의 해황 및 해역의 해양물리적 특성(수층별 음속 및 유향과 유속)을 측정하여 환경에 따른 시제의 동적 반응을 평가할 수 있도록 관련 정보를 제공하였다.
InSAS의 해상도 평가를 위해, 미 해군이 사용하고 있는 3가지 기뢰를 모사하여 인공목표물을 만들었다. 제작한 모의 기뢰를 시험장 임의 해역에 설치하였으며 상용 사이드스캔 소나 및 멀티빔 음향탐사를 실시하여 InSAS 성과와 비교할 수 있도록 비교군 자료를 제시하였다. 환경정보가 잘 알려진 수중 실해역 시험장은 증대하고 있는 유사 수중탐색체계 개발 및 수중이동체의 실제 운영성능 향상을 위한 연구개발 과정에 필수적인 구성 항목이다. 연구기획 단계에서부터 실제 시제의 운영 시나리오에 맞춘 해상시험장 조건 및 해상시험 설계에 대한 고려가 반영되어야 한다. 실제 환경에서 운영가능한 수중무인체계 및 탐색 체계 개발을 위해 국가해양공간계획 상에 국가적 차원의 해상시험장을 반영해야 한다. 수중체계 기능 및 성능 시험을 위한 시험장 환경 조성 및 실시간 정보취득을 위한 수중체계에 대한 시험인프라 조성에 대한 연구가 필요하다.
후 기
본 연구는 민군협력진흥원의 “민군 기술 협력사업”의 지원을 받아 수행된 연구결과이다(과제번호: 15-CM- SS-01, 과제명: 예인형 간섭계측합성개구소나(InSAS) 개발).