



서 론
1.1 연구배경 및 목적
UHF(Ultra High Frequency)무전기의 주파수 도약(Frequency Hopping)방식인 HQ(Have Quick)은 교신에 사용하는 주파수를 해당 무전기에서 운용가능한 주파수 내에서 수시로 변경해가면서 교신하기 때문에 감청 및 교란을 위해서는 교신 주파수를 계속 추적해야 하는 기술적 어려움이 있었다. 하지만 주파수 추적 기술이 발전함에 따라 기존 HQ 무전기의 주파수 도약 방식으로는 완벽한 대응이 제한되는 사항이다. 이에 미국에서 개발되어 NATO가 사용하고 있는 SATURN (Second Generation Anti jam Tactical UHF Radio for NATO) 무전기로의 성능개량에 대한 검토가 진행되고 있다[1].
STANAG 4372에 정의된 SATURN 기능으로 운용 가능한 공지통신 무전기는 HQ Ⅱ와 동일하게 주파수도약 방식을 사용하나, 주파수 도약을 아날로그에서 디지털 방식으로 바꿈에 따라 데이터 변조 방식 및 주파수 도약 속도를 증가시켜 감청 및 교란에 대한 보안기능 및 항재밍 능력을 비약적으로 발전시켰다.
하지만 주파수 도약 방식을 사용하는 무전기로 교신하기 위해서는 동일한 시간정보로 교신 대상들 간의 동기상태를 유지하고 사전에 약속된 암호화된 도약 패턴으로 주파수를 변경하여야 한다. 만약 교신 대상들 간의 도약 시간과 도약 주파수가 일치 하지 않으면 교신이 불가능하게 된다. 이러한 문제점을 해결하기 위하여 교신을 주고받는 복수의 무전기의 시간 동기화를 위해 SATURN 무전기에 입력하는 시간정보가 TOD(Time Of Day)이다.
TOD는 UTC(협정세계시)를 기준으로 하며, SATURN 무전기에 입력하는 방법에는 1) GPS(Global Positioning System, 위성항법시스템) 수신기로부터 연산된 UTC 시간정보를 SATURN 무전기에 연동 또는 GPS 신호를 SATURN 무전기에 직접 입력하여 SATURN 무전기 내부에서 TOD 도출, 2) 비행 전 수동으로 입력, 3) 중계기 또는 타 항공기에서 TOD 정보를 수신 등이 있다. 중계기에서 TOD 정보를 수신하는 방법은 현재 HQ을 운용하는 주요 방법이며 수동 장입에 비해 효율적이다. 하지만 1)TOD 중계기가 무력화되거나, 2) 중계기의 전파송신범위 밖이거나 3) 중계기에서 연산한 TOD 정보의 오차가 운용 범위를 벗어날 경우 주파수 도약 교신이 제한된다[2]. 반면 무전기에 GPS를 연동하는 방법은 지구 전체에 송신되는 GPS신호를 수신하여 어디서나 TOD 정보를 생성하여 사용할 수 있다는 장점이 있다. 또한 항공기에서 GPS를 통하여 TOD 정보를 연산한 후 타 항공기에 TOD를 중계할 수 있게 됨에 따라 개별 항공기가 중계기와 같은 역할을 수행할 수 있다.
1.2 연구범위 및 방법
본 논문에서는 공지통신 무전기 성능개량을 위한 자동 TOD 연동방안에 대하여 제안하였다. GPS신호를 활용하여 SATURN 무전기에 TOD를 연동하기 위해 다양한 종류의 레거시 항공기에 장착되어 있는 L1 Band GPS안테나를 MOPS(Minimum Operational Performance Standard, 최소 운용 성능 규격)에 맞게 개조하기 위한 이론적 배경을 확인하고 그에 맞는 설계안을 제시하였다.
개조에 대한 성능검증으로는 개조 전과 후에 대하여 위성 추적 및 TOD 정보생성 능력을 비교하기 위하여 주요 항목들을 수치화 및 저장 가능한 GPS 수신기를 사용하였다. 실제 항공기에 장착되어 있는 GPS 안테나를 개조 및 연결하여 일정 시간동안 주요항목들의 수치들을 수집 및 저장하였고, 추후 비교 및 분석함으로써 성능향상에 대한 검증 방법으로 제안하였다.
본 논문에서 제안한 방안을 통해 공지통신 무전기 성능개량 시 자동 TOD 연동이 가능하며 공지통신무전기를 활용한 작전운용능력 향상이 기대된다.
SATURN 무전기 자동 TOD 연동 방안
2.1 GPS 신호를 활용한 자동 TOD 연동
GPS 신호를 활용하여 SATURN 무전기에 자동 TOD를 연동하는 방안은 Fig. 1. SATURN 무전기의 자동 TOD 연동 구조는 (b)와 (c), (d)이다. 3가지 자동 TOD 연동 방안은 기존 HQ 무전기의 운용개념 및 제작사 별 SATURN 무전기의 입출력 구성에 따라 구분되며, 기존 항공기에 장착된 GPS 안테나를 이용하는 설계개념은 동일하다.
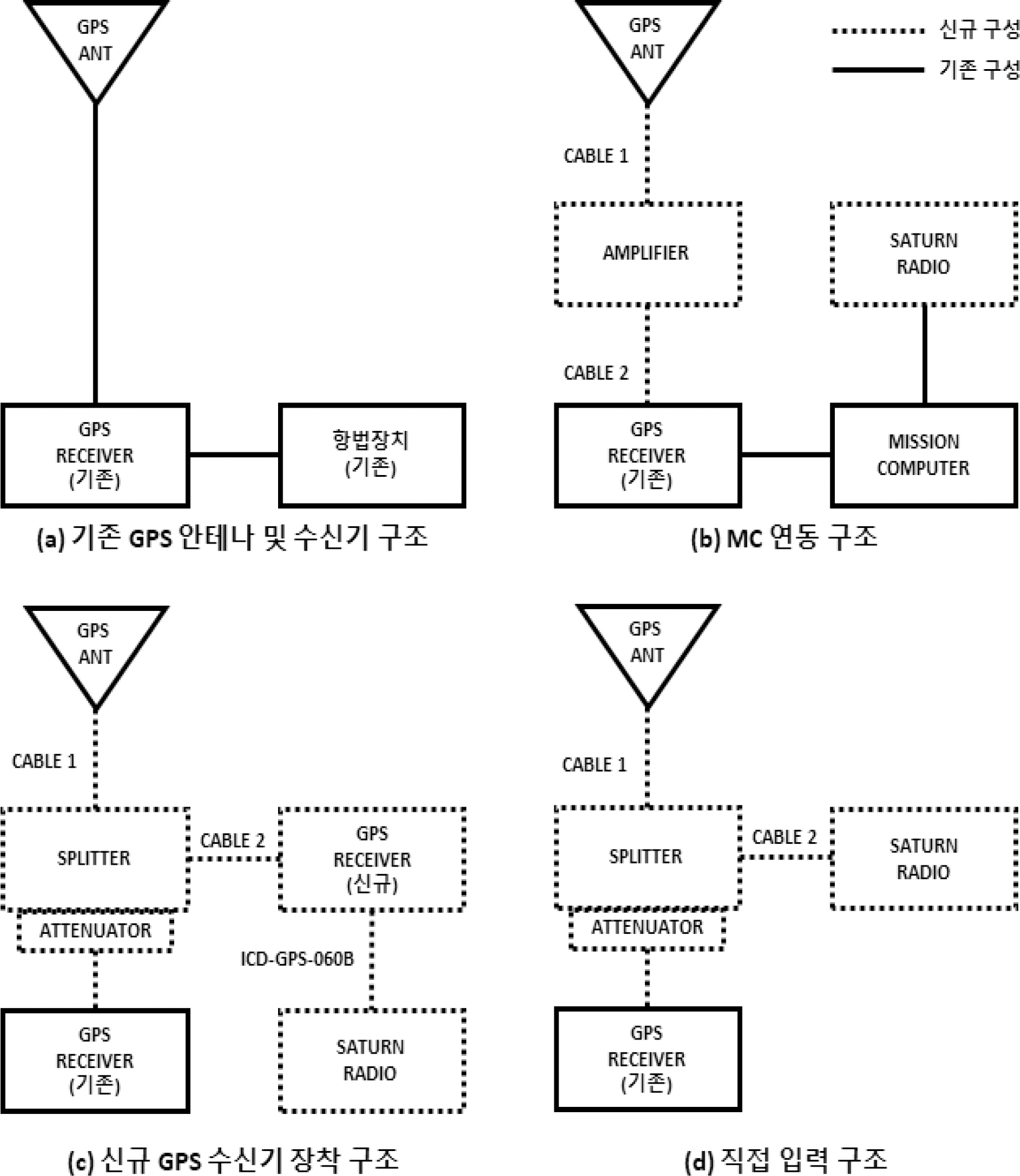
먼저 항공기의 GPS 안테나와 수신기의 구조는 Fig. 1 (a)와 같이 GPS 안테나와 수신기가 직접 연결되며 GPS 수신기는 항법장치와 연동되고 UHF 무전기와는 연동되지 않는다.
Fig. 1 (b)는 HQ 무전기와 임무 컴퓨터(Mission Computer)가 연동된 운용개념을 가지는 연동형 항공기에 대한 자동 TOD 연동방안으로, SATURN 무전기가 HQ 무전기를 대체하여 신규 장착되며 1553B 통신을 이용하여 기존 GPS 수신기로부터 넘겨받는 TOD 정보를 임무 컴퓨터가 처리하여 SATURN 무전기에 넘겨주는 기존 구성을 그대로 사용한다. 다만, 기존 GPS 안테나가 MOPS 규격에 부합하지 않아 GPS 위성 추적 성능이 부족한 경우에, GPS 안테나와 수신기 사이에 신규로 증폭기(Amplifier) 및 Cable을 연동하여 MOPS 규격을 만족하도록 연동한다.
Fig. 1 (c)와 (d)는 HQ 무전기와 임무 컴퓨터가 연동되지 않는 운용개념을 가지는 독립형 항공기에 대한 자동 TOD 연동방안으로, SATURN 무전기가 GPS 정보를 받아들이는 형태에 따라 구분되어진다. 먼저 (c)와 같이 SATURN 무전기가 GPS 정보를 Digital 정보로 받아들이는 경우, STANAG 4372에서 요구하는 Data형식인 ICD-GPS-060B에 맞춰 전달해 주어야 한다[3]. 이 때, 기존 GPS 수신기가 ICD-GPS-060B 형태로 GPS 정보 전달이 불가능한 경우, 신규 GPS 수신기를 장착하여 SATURN 무전기가 GPS 정보를 받아들일 수 있도록 한다. 반면 Fig. 1 (d)와 같이 SATURN 무전기 내에 GPS 수신기가 내장되어 SATURN 무전기 스스로 TOD 정보를 연산해 낼 수 있는 경우, Analog GPS 정보를 분기해서 입력해 준다.
Fig. 1 (c), (d) 역시 항공기에 장착된 기존 GPS 안테나가 MOPS 규격을 만족하지 않아 GPS 위성추적성능이 떨어지는 경우, MOPS 규격에 맞게 개조가 필요하며, Fig. 1 (b)와 다르게 신호 분기가 필요하므로 분할기(Splitter)를 적용한다. 또한 GPS 안테나를 MOPS 규격에 맞게 개조하는 경우, 공통적으로 GPS 수신기에 입력 가능한 최고 전력범위 내에서 Analog GPS 신호 증폭이 가능하다. 반면 기존 GPS 수신기의 입력 가능한 최고 전력이 확인 불가능한 경우에는 설계상에서 발생한 잉여이득을 감쇠기(Attenuator)를 사용하여 감쇠시킴으로써 기존 GPS 수신기를 운용하는 입력 전력과 동일하게 하여 기존 GPS 수신기에 미치는 영향을 최소화 시킨다.
2.2 항공기용 GPS 안테나 규격
항공기와 항공기 전자 시스템과 관련된 기술과 과학을 발전시키는 비영리 단체인 RTCA에서 생성한 규격 들 중, 항공기 용 GNSS 안테나에 대한 규격은 RTCA DO-228과 DO-301이 있다. DO-228은 GPS(미국)와 GLONASS(러시아)에 대한 항공기용 GNSS(Global Navigation Satellite System, 범지구 위성항법 시스템) 안테나의 MOPS이며, 수동 안테나와 수동 안테나에 증폭기가 직접된 능동 안테나 2가지 형태에 대하여 정의하고 있다[4].
DO-301은 GPS(미국)와 GALILEO(유럽)에 대한 항공기용 GNSS 안테나의 MOPS이고, 능동 안테나 운용에 필요한 최소 운용 성능에 대해서만 정의하고 있으며, DO-228에 정의된 능동 안테나 최소 성능에 비해 몇 가지 항목이 추가 및 보완되었다[5].
DO-301 규격의 주요 성능 항목인 G/T Ratio(Gain to Noise Temperature Ratio, 이득 대 잡음온도 비)는 GPS 안테나의 패턴이득과 GPS 안테나 및 GPS 안테나의 하위소자들을 전부 포함한 잡음온도에 대한 비로써, GPS 시스템에서 반송 주파수(L1, 1575.42 MHz)에 실려 있는 위치 및 시간정보를 복조하기 위해서 필요한 신호 대 잡음비(Signal To Noise Ratio, S/N)를 구성하는 주요 항목이다. G/T Ratio는 고도각(Elevation Angel) 5도, 전체 방위각 및 전체 환경온도에 대해서 L1±8 MHz 주파수 범위내에서 −32.6 dB/K, L1±2 MHz 주파수 범위내에서 −31.6 dB/K 보다 작지 않아야 한다. 고도각 5도는 실 운용 환경에서 안테나가 신호를 안정적으로 수신할 수 있는 최소한의 각도이며, 아래 식 (1)과 같이 표현된다.
GA는 후방 증폭기 이득을 제외한 안테나 패턴만의이득을 의미한다. TSYS는 안테나와 하위 구성품들의 입력온도의 합으로 Kelvin 단위로 표현된다. S/NO는 신호의 크기가 잡음 대비 얼마나 크냐에 대한 수치이고, k는 볼츠만 상수로 1.38065×10−23 W/Hz/K이며, GS 는 안테나의 등가 수동 이득으로 GA와 동일한 개념이다. TA는 유효 안테나 온도로 DO-301 Appendix A에서 일반적으로 75 K에서 100 K 사이의 값을 가진다고 명시하고 있으며, TR는 하위 구성품 중 첫 번째 구성품의 입력온도로 단위는 Kelvin이다. GR는 하위 구성품 중 첫 번째의 이득을 적용한다. 식 (2)는 신호 대 잡음비(S/NO)를 입력 쪽에서 정의한 것으로, 안테나의 등가 수동 이득인 GS는 패턴이득인 GA로 바로 변환 가능하다. TSYS는 식 (3)과 같이 하위 구성품들 중 첫 번째의 이득(GR)이 클수록 TA와 TR의 합에 수렴한다. 결론적으로 식 (2)의 맨 오른쪽 항과 같이 신호 대 잡음비의 최소값은 위성으로부터 송신된 신호가 안테나로 입력되는 최소 신호(SMIN)와 볼츠만 상수 k, G/T Ratio로 구성되며, 설계자가 G/T Ratio를 크게 할수록 신호 대 잡음비(S/NO) 성능이 좋아져 신호의 세기가 미약한 위성을 탐지할 확률이 높아진다. G/T Ratio는 DO-228과 같이 수동 안테나에 단순히 증폭기를 내장한 수준에서 벗어나, 안테나와 증폭기가 유동적으로 연동된 시스템 측면에서 필요한 성능을 정의했다는 점에 의미가 있다. 이를 활용하면, DO-228에서 정의한 수동 안테나에 외부 증폭기를 연동하는 방식으로 DO-301에서 제시한 G/T Ratio 요구 성능을 만족하는 시스템을 설계할 수 있다.
2.3 Legacy 항공기 GPS 안테나 장착 현황
항공기에 장착되어 있는 GPS 안테나를 활용하여 SATURN 무전기에 자동으로 TOD를 연동하기 위해서는 기존 항공기의 GPS 안테나에 대한 현황 파악이 필요하다. 현재 진행 중인 <피아식별장비 성능개량 사업>을 통해 확인한 기존 항공기의 GPS 안테나 종류는 MAGR(Miniaturized Airbone Global Positioning System)용 GPS 안테나(수동)와 TAWS(Terrain Awareness and Warning Systems)용 GPS 안테나(능동), 일반 GPS 안테나 3종류이며 아래 Table 1과 같다.
Table 1.
Types of legacy aircraft GPS antenna
| 항목 | 유형1 | 유형2 | 유형3 |
|---|---|---|---|
| 안테나 | 수동 | 수동&능동 | 능동 |
| 채널 | L1&L2 | L1 L1&L2 | L1 |
| 수신기 | MAGR | PLS Doppler EGI | TAWS |
| 규격 | DO-160 | DO-160 | DO-160 DO-301(A社 제품) |
| 제조사 | A社 | A社, B社 | A社, B社 |
규격 버전은 조금씩 다르지만, 모든 안테나가 공통적으로 항공장비에 대한 환경시험규격인 RTCA DO-160은 만족하고 있다. 유형1의 MAGR용 GPS 안테나는 후방에 별도의 IF 증폭기가 있기 때문에 L1&L2 대역을 수신하는 수동 안테나가 적용되어있다. 대조적으로 유형3의 TAWS GPS 안테나는 L1 대역만을 사용하며 능동 안테나를 사용한다. 유형2의 해당하는 GPS 안테나는 GPS 수신기 종류에 따라 채널과 수동/능동 안테나로 구분되며, 능동 안테나의 경우 DO-228 규격에 정의되어 있는 안테나 이득을 가진다.
2.4 SATURN 무전기와 GPS연동을 위한 설계
각 유형에 대해서 DO-301에서 정의한 G/T Ratio를 만족시키는 설계를 위해서는 각 소자들의 잡음온도 값을 알아야 한다. 이득을 가지는 하위 구성품의 경우 주로 증폭기이며, 성능 지표중 하나인 잡음지수(Noise Figure)를 식 (4)와 식 (5)를 활용하여 잡음온도(Noise Temperature)로 변환한다. 손실을 가지는 하위 구성품의 경우 주로 Cable이며, 마찬가지로 Cable 손실값을 식 (6)을 활용하여 잡음온도 값으로 변환한다. 모든 하위구성품의 잡음온도 값을 식 (3)에 대입 할 수 있어야 G/T Ratio 계산이 가능하다[5,6].
TE는 유효 잡음온도, T0는 주변 온도이며 둘 다 Kelvin으로 표현되며, F는 잡음지수로 Noise Factor, L 은 Loss Factor 이다. 식 (5), (6)에 공통적으로 T0(주변온도)가 들어가는데, 항공기의 경우 주요 작전 비행 고도에 해당하는 Sky 온도값을 대입하여 설계하는것이 타당하지만, 사계절이 있는 우리나라에서 Sky 온도는 계절별로 바뀌기 때문에 가장 더운 여름날의 평균 기온 중 최고값인 298.4 K(+25.4 ℃)을 올림한 300 K (+27 ℃)을 적용하여 설계하였다[7]. ISA(International Standard Atmosphere) 표와 같이 고도가 1000 ft 올라갈수록 온도가 −2 ℃씩 떨어지기 때문에 G/T Ratio는 개선되는 방향으로만 움직인다[8].
유형1에 대해서 Fig. 1 (d)와 같이 항공기를 개조하기 위해 모든 구성품들의 잡음지수와 손실, 이득을 확인하고 이를 활용하여 시스템 전체의 TSYS(Noise Temperature)로 환산한 후 G/T Ratio를 만족하도록 설계를 진행하면 Table 2와 같다. 앞서 언급한 바와 같이 Sky 온도는 300 K이 적용되어 있으며, 유효 안테나 온도는 DO-301에서 제시한 최대값인 100 K를 적용하였다. 안테나 이득의 경우 대표적인 안테나 제작사에서 Elevation Angle = 5 deg 일때의 이득을 −4.5 dBic로 제작하기 때문에 그대로 적용하였다[9].
Table 2.
Design for automatic TOD(long cable) sync.
항공기에 장착되어 있는 기존 GPS 안테나에 수신되는 신호를 분할하여 SATURN 무전기와 연동하도록 설계하기 때문에 GPS신호가 분할되는 과정에서 신호의 감쇠가 없도록 증폭기(Amplifier)나 능동 분할기(Active Splitter)를 항공기에 신규 장착해야 한다. 예를 들어 Fig. 1 (b)와 같은 경우 GPS신호의 분기가 필요없는 경우 증폭기를 사용하고, Fig. 1 (c)와 (d)의 경우 GPS신호의 분기가 필요하기 때문에 증폭기 이후에 연결되는 분할기를 사용하거나 Table 3과 같이 이득이 큰 분할기 하나만을 사용한다.
Table 3.
Design for automatic TOD(short cable) sync.
GPS안테나와 분할기간의 Cable 길이가 길어질수록(감쇠가 클수록) G/T Ratio 성능이 안 좋아지기 때문에 분할기의 장착위치는 Cable1 길이와 항공기 진동을 함께 고려하여 선정해야 한다. Table 2에서 Cable1의 길이는 현재 진행 중인 <피아식별장비 성능개량 사업> 진행간 항공기의 GPS안테나에서 피아식별장비까지의 경로를 자동 TOD 연동되도록 개조한 설계이력을 반영하여, 2 m를 적용하였고 Cable1의 손실을 산정하였다. Cable2와 Cable3의 길이(손실값)는 피아식별장비 자동 TOD 연동시에 사용되었던 최장 길이의 Cable 길이를 적용하였지만, GPS 안테나의 장착위치와 피아식별장비의 장착위치가 가까운 기종의 경우에는 Table 3과 같이 Cable2만으로 연결이 가능하기 때문에 하위 구성품 연결이 불필요하다.
Cable1,2,3는 TNC와 SMA 커넥터가 조립 가능한 RF 동축 Cable인 RG402 Cable을 가정하였으며, L1 대역인 1.5 GHz에서 1 m당 0.43 dB의 기대 손실값을 가진다[10]. Cable의 단위 m당 손실값이 큰 경우, ARINC 743A에서 요구하는 전체 Cable 손실인 −13 dB를 넘어갈 수 있기 때문에 Cable에 조립 가능한 커넥터 종류와 배선 경로 상 Cable의 굽힘각을 고려하여 Cable의 두께를 선택하여야 한다.
앞서 식 (3)에서 설명한 바와 같이 하위 구성품 중 첫 번째 회로의 이득(GR)이 크면 TSYS가 TA와 TR의 합에 수렴하지만, 현재 설계에서는 하위 구성품의 첫 번째 회로의 이득은 Cable 1의 손실값이다. 차선책으로 하위 구성품 중 두 번째인 능동 분할기 뒤에 연결된 구성품의 잡음온도값들의 영향력을 최소화 시키면서, 최장 길이를 가정한 Cable2와 Cable3의 손실값을 포함하여도 DO-301에서 정의한, MBTTG(Minimum Boresight Total Transducer Gain, at θ = 90°, 상승각 90도에서 최소 전체 전달 이득)의 규격인 29.5 dB 이상을 만족할 수 있도록, 능동 분배기의 이득을 34 dB로 설정하였다. 상기와 같은 설계 진행시, G/T Ratio는 −30.15 dB/K, MBTTG는 30.8 dB이며 DO-301에서 정의한 기준을 만족한다.
유형 2의 능동 안테나와 유형 3의 경우는 이미 안테나에 증폭기가 직접된 형태로, 유형 1과 다르게 Cable1이 증폭기 후방에 연결되기 때문에 G/T Ratio와 MBTTG를 만족시키기 위한 이득이 일부 확보된 상태이다. 유형 1과 같이 능동 분할기를 적용하여 설계하되 기존 GPS 수신기 쪽으로 전달되는 잉여 이득 중 일부 또는 전부를 감쇠기로 감쇠하여 기존 GPS 수신기의 입력되는 신호의 크기를 제한한다. 단, 감쇠기의 위치는 반드시 능동 분배기 후방에 연결되어야 한다.
시험방법 및 측정
3.1 시험 목적 및 개요
본 논문에서 제안한 자동 TOD 연동 방안에 대한 검증을 위해서 실제 항공기에 장착되어 있는 GPS 안테나를 사용하여 개조 전/후의 성능을 확인하고 분석한다. 개조를 통해 향상된 G/T Ratio는 GPS 신호 수신경로의 신호 대 잡음비의 성능을 개선하여 개조 전에는 탐지할 수 없었던 작은 위성신호도 감지 가능하게 되며 이는 결국 위성의 탐지 숫자가 증가하는 결과로 이어진다. 위성을 4개 이상 감지한 순간부터 비교적 정확한 TOD(=UTC)가 생성되며, C/NO(Carrier To Noise Ratio, 10log(S/NO))값 확인을 통해 수치적으로 G/T Ratio 개선되었는지 확인한다[11].
3.2 시험 조건
위성이 매 순간마다 움직이고 있기 때문에 GPS 성능 확인시험은 동일한 시간에 동시에 수행되어야 하나 항공기에 장착된 동일 GPS 안테나를 사용해야 하기 때문에 시간을 나눠서 시험을 진행하되 시험 간 시간차이는 가능한 짧게 한다. 시험은 성능 검증에 필요한 중요 항목들을 일정 시간 간격으로 저장하고 추후 비교 가능하도록 출력할 수 있으며 이전 추적 이력을 지우고 매번 새롭게 GPS 위성을 추적하는 Cold Start 기능을 가지고 있는 독립적인 GPS 수신기를 사용한다.
3.3 시험 구성 및 방법
Fig. 2는 <피아식별장비 성능개량 사업> 진행 간, 피아식별장비에 TOD를 연동하고 그 성능을 시험한 방법으로 SATURN 무전기와 TOD 연동도 동일한 방법으로 시험이 가능하다.
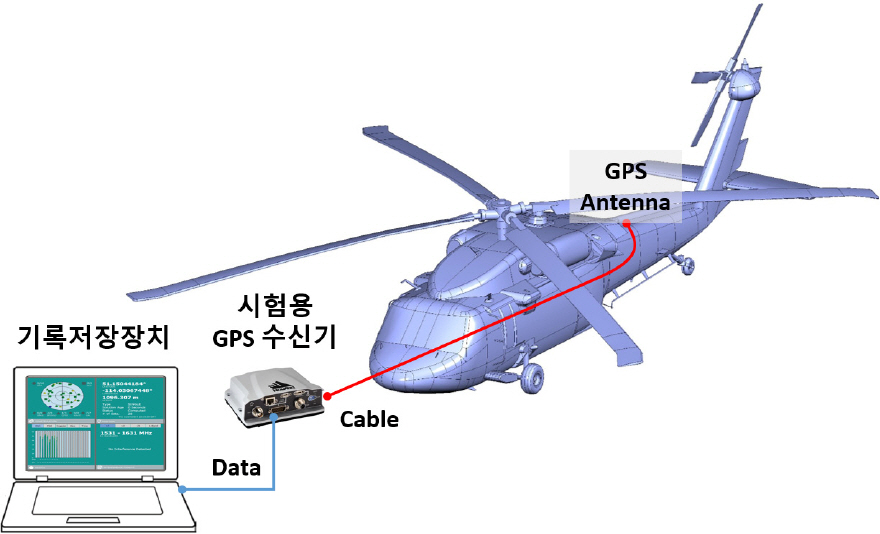
GPS 안테나가 위성을 추적할 수 있는 탁 트인 야외 공간에 항공기를 위치시킨 후, 개조 전 GPS 안테나에 연결된 Cable을 시험용 GPS 수신기에 입력하고, 기록저장장치를 통해 성능검증에 필요한 주요 항목들을 5분간 기록한다. 기록이 완료되면 시험용 GPS 수신기의 Cold Start기능을 활성화 후, 제안된 자동 TOD 연동 방안에 따라 항공기 개조를 완료한 후 SATURN 무전기에 입력되는 Cable 출력을 측정용 GPS 수신기에 연결하여 시험을 재 수행한다.
3.4 시험 결과
<피아식별장비 성능개량 사업> 진행 간 피아식별장비와 TOD 연동 개조 전/후 시험결과는 다음 Table 4와 같다.
Table 4.
Test results before and after modification
시험에 사용한 GPS 안테나는 L1, L2 채널을 모두 수신하며, 시험용 GPS 수신기는 Novatel 社의 PWRPAK7을 사용하였고, 개조 전/후 5분간에 탐지된 모든 위성에 대한 C/NO값과 탐지 위성수의 평균값을 기록하였다. 개조 전/후의 시험 시간의 차이는 약 39분이다.
제안된 방법으로 개조된 SATURN 무전기 입력경로에서의 탐지 위성수 및 C/NO값은 변화가 확인된 반면, 감쇠기를 사용하여 개조 전/후 이득을 동일하게 한 기존 항공기 GPS 수신기 경로에서는 개조 전/후가 동일하였다. 또한 시험용 GPS 수신기가 모든 GNSS 위성을 추적하는 과정에서 GPS의 채널 주파수와 인접한 GLONASS 신호가 항공기에 장착된 GPS 안테나로부터 적절한 패턴이득을 얻지 못한 상태에서 C/NO 값을 연산하였고, 이는 최대 및 평균탐지의 경우 GPS 만을 고려한 경우에 비해 GLONASS를 같이 고려한 경우 C/NO값이 떨어지는 결과를 만들어 내고 있다.
Table 4에서 개조 전 최소 탐지 위성수를 보면 시험용 GPS수신기에서는 GPS 위성을 2개 까지만 추적한 반면에 기존 항공기의 GPS 수신기는 개조 전/후 동일하게 위성을 4개 까지 추적 한 것을 확인 할 수 있다. 이는 일반적으로 GPS 수신기가 이전 위성 추적이력을 가지고 있는 경우, 더 빠르게 위성 탐지가 가능하다는 점에서 차이가 발생한 것으로 판단할 수 있다.다만 개조 후 시험용 GPS 수신기가 위성을 최소 9개 까지 추적한 것과 항공기의 GPS 수신기가 시간과 좌표 연산에 필요한 최소 위성수인 4개 까지만 추적한 상황을 고려하면, 레거시 항공기들의 GPS안테나가 반드시 MOPS 기준으로 개조되어야 할 필요성을 확인할 수 있다.
시험결과를 살펴보기 위해 식 (2)를 참고하여 DO-301에서 제안하는 S/NO이 최소값인 경우(G/T Ratio 31.6 dB/K인 경우)에 대해서 C/NO를 계산해 보면, −128.5 dBm + 198.6 dBm/Hz/K −31.6 dB/K = 38.5 dB/Hz 가 나온다. −128.5 dBm은 IS-GPS-200에서 정의한 값으로 위성에서 송신한 신호가 지상에서 최소 이 값으로 측정되도록 해야 한다는 기준값이며 식 (2)에서 SMIN 값에 해당한다. 지상에서 측정한 값이 이 값보다 작은 경우에는 위성에서 송신하는 신호의 전력을 증가한다. 볼츠만 상수 k를 log 취하고 10을 곱한 경우 198.6 dBm/Hz/K가 계산된다[5,10,12].
<피아식별장비 성능개량 사업>을 통해 Table 4의 항공기의 G/T Ratio는 −31.55 dB/K로 설계되었으며, 해당 설계치에 따른 기대 C/NO 값은 앞서와 같은 방식으로 계산하면, 38.55 dB/Hz가 계산된다. Table 4의 개조 후 GPS와 GLONASS를 함께 고려한 경우의 C/NO 평균을 확인하면 38.58 dB/Hz로 이는 앞서 식 (2)를 산술적으로 계산한 최소 C/NO 값과 매우 유사한 값이며, GPS만을 고려한 경우인 39.35 dB/Hz로 계산해도 0.8 dB의 매우 근소한 차이가 나는 값이다. 이 결과를 통해 해당 항공기의 GPS안테나 및 하위 구성품들에 대하여 G/T Ratio를 만족시키기 위한 개조가 적절하게 이루어졌음을 통계 및 산술적으로 확인할 수 있다.
결 론
본 논문을 통해 우리 군의 차세대 공지통신 무전기가 될 SATURN 무전기의 운용폭을 넓히기 위한 자동 TOD 연동 방안에 대하여 제시하였다.
먼저 지상 또는 타 항공기의 중계 역할을 활용한 TOD 수신의 문제점과 GPS 안테나를 통해 자동 TOD 를 연동하는 방식의 장점을 제시하였고, GPS안테나 개조를 위한 이론적 배경인 최소 운용 성능 규격과 <피아식별장비 성능개량 사업>간 쌓은 설계경험을 활용하여 SATURN 무전기 자동 TOD 연동안을 도출하였다. 또한 연동안의 핵심인 G/T Ratio 개선을 확인할 수 있는 검증된 시험방안을 제시하였고, 시험결과 설계과정에서 기대한 값을 달성함을 통계 및 산술적인 방법으로 확인하였다.
본 연구에서 제시한 항공기 성능개량 및 성능검증 방안을 차세대 공지통신 무전기 성능개량에 적용하면 신규 GPS 안테나 장착 없이 기존 GPS 안테나를 최소한으로 개조함으로써 GPS 신호가 닿는 전세계 어디에서든 효과적으로 SATURN 무전기를 운용할 수 있을 것으로 기대된다.




