



서 론
전자파를 반사 또는 방사하는 전방표적에 대한 탐지 및 추적은 군사적으로 가장 중요한 기능 중 하나이다. 모노펄스 기법은 전방표적에 대한 방향 탐지에 가장 널리 사용되는 기법으로서, 대부분의 경우 비행체의 노즈부에 평면배열안테나 또는 카세그레인 안테나 등을 배치하여 운용한다. 상기한 안테나들은 좁은 빔 폭 및 높은 안테나 이득을 위하여 탑재 가능한 범위 내에서 최대한 크게 제작되므로, 이러한 안테나들이 장착되는 경우 비행체 노즈부의 활용에 큰 제약이 존재한다. 노즈부의 활용을 위한 대안으로서, 안테나를 노즈부 외곽이나 비행체의 동체 측면에 배열한 단원형배열안테나(single-ring circular array antenna)를 구성하여 모노펄스 기법을 적용할 수 있다. 하지만 배열을 구성하는 안테나 수가 많다면 배치에 어려움이 존재할 뿐만 아니라 시스템의 복잡도가 증가하며, 배열을 구성하는 안테나 수가 적다면 배열안테나의 빔 폭 및 안테나 부엽 준위가 증가하여 원활한 방향탐지 및 추적에 어려움이 있을 수 있다[1].
이에 단원형배열안테나의 경우, 모노펄스 기법보다는 간섭계(interferometer) 방식으로 전방표적에 대한 방향탐지 및 추적을 수행하는 것이 유리하다. 간섭계는 간섭계를 구성하는 안테나 소자 간 이격거리가 클수록 우수한 각도 추적 정확도를 가지나, 안테나 간 이격거리가 반 파장 이상일 경우 표적의 각도와 위상차 간 일대일 대응 관계가 성립하지 않는 모호성 문제가 발생할 수 있다. 이와 같이 간섭계는 각도 추적 정확도와 모호성(ambiguity) 문제 간 trade-off 관계가 존재하므로[2], 우수한 각도 추적 정확도를 얻기 위해서는 모호성의 해결이 필수적이다. 모호성 해결을 위해서는 동일 선상에 위치한 세 개 이상의 안테나를 사용하거나[2], 진폭 비교 기법(amplitude comparison)을 사용하는 방안[3] 등이 제안되어왔다. 동일 선상에 위치한 세 개 이상의 안테나를 사용하여 전방표적의 방향을 탐지하는 간섭계 시스템은, 다섯 개의 안테나를 십자가 형태로 배열한 후 좌/우의 안테나와 중앙에 위치한 안테나 수신 신호의 위상을 이용하여 표적의 방위각을 도출하고, 상/하의 안테나와 중앙에 위치한 안테나 수신 신호의 위상을 이용하여 표적의 고각을 도출한다[4]. 이는 배열 중앙의 안테나를 필요로 하므로 노즈부 활용 목적에는 적합하지 않다.
진폭 비교 기법의 경우, 2차원 평면상에서는 진폭 비교 결과값과 표적의 각도 사이에 선형적인 관계가 성립하므로 이를 이용하여 편리하게 간섭계 모호성 문제를 해결할 수 있으나, 3차원 공간상에서는 선형적인 관계가 성립하지 않으므로 적용에 많은 한계가 존재한다. 이에 대한 상세한 설명은 2.2절에서 기술한다.
본 논문에서는 공간분할테이블의 개념을 제안하고 이를 이용하여 단원형배열안테나 전방의 3차원 공간에 대한 간섭계 모호성 문제를 해결하는 방안에 대하여 기술한다. 이를 위해 2장에서는 간섭계 및 진폭 비교 기법에 대한 간단한 설명과 제한점에 대하여 서술하고, 3장에서는 공간분할테이블의 개념과 이를 이용한 모호성 해결 방안에 대하여 기술한다. 다음으로 4장에서는 단원형배열안테나에 제안한 방법을 적용한 결과를 기술한다.
배열안테나 기반 방향탐지 기법
2.1 간섭계
간섭계는 두 개 이상의 수신 안테나를 이용하여 표적의 방향을 도출하는 시스템으로서, 수신 신호 간의 위상차를 이용하여 표적의 각도를 계산한다[2]. Fig. 1과 같이 네 개의 안테나를 배치한 배열안테나에서, 안테나 간 위상차와 표적의 방위각 θAZ, 고각 θEL 간의 관계는 식 (1), (2)와 같다. 아래 식에서 ϕUD는 U/D 안테나 간의 위상차, ϕRL는 R/L 안테나 간의 위상차를 의미하며, DUD, DRL는 각각 U/D, R/L 안테나 간 이격거리이다.

이 때, 간섭계를 이용하여 도출한 표적 각도의 RMS 각도 오차는 식 (3)과 같이 표현되며[5], 이로부터 주어진 SNR에서 안테나 간 이격거리가 클수록 우수한 각도 추적 정확도를 나타냄을 알 수 있다.
하지만 식 (1), (2)로부터 안테나 간 이격거리가 반 파장(λ/2) 이상일 경우, 표적의 각도와 위상차 간 일대일 대응 관계가 성립하지 않는 모호성 문제가 발생 할 수 있음을 쉽게 예측할 수 있으므로, 우수한 각도 추적 정확도를 얻기 위해서는 모호성 문제에 대한 대책이 필요하다.
간섭계를 이용하여 모호성 문제를 해결하기 위해서는 서로 다른 간격을 갖도록 세 개 이상의 안테나를 배열하고 상호 위상차를 비교하는 방법[4]이 있으나, 이 방법은 배열 중앙에 위치하는 안테나로 인하여 비행체 노즈부 활용에 제약이 따른다.
2.2 진폭 비교 기법
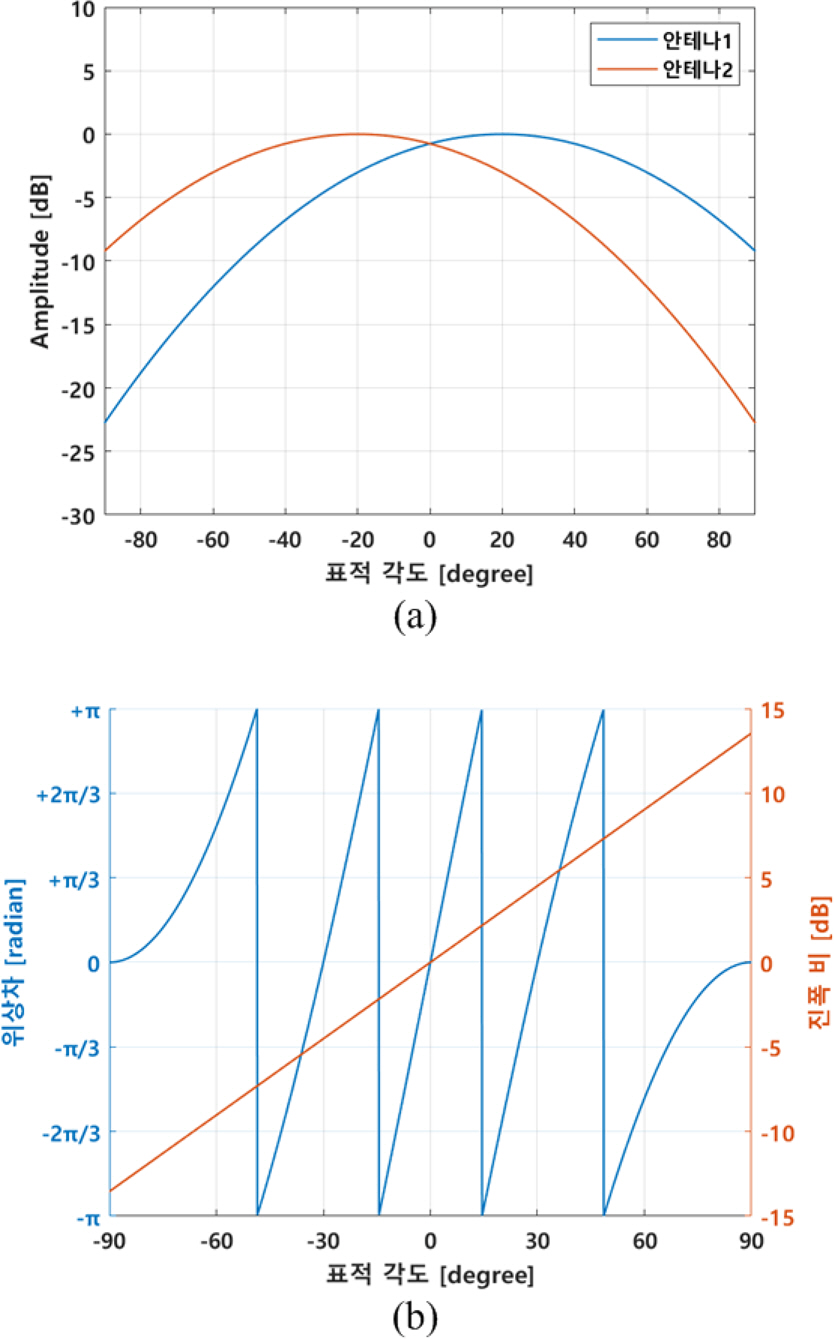
진폭 비교 기법은 배열을 구성하는 안테나 수신 신호 간의 진폭(amplitude) 비를 이용하여 표적의 각도를 계산한다[3]. 이를 위해서는 배열을 구성하는 안테나에 기구적 또는 전기적 방법을 통해 배열의 기준방향 (boresight) 기준으로 기움각(θs)을 주어 각 안테나의 주 빔 방향에 차이를 둔다. 일반적으로 진폭 비교 기법은 간섭계 방식에 비하여 낮은 수준의 각도 추적 정확도를 나타내나 모호성 문제에서 상대적으로 자유롭다는 장점을 갖는다. 예를 들어, 2차원 평면상에 일렬로 배치된 가우시안(Gaussian) 패턴을 갖는 두 안테나 수신 신호의 진폭 비와 해당 평면상에 위치한 표적의 각도 간에는 일대일 대응 관계가 존재한다. 따라서 2차원 평면에서는 두 안테나 수신 신호의 진폭 비와 위상차를 함께 이용하여 표적의 각도를 계산함으로써 간섭계의 모호성 문제를 쉽게 해결할 수 있다 (Fig. 2).
Fig. 2.
(a) Antenna beam pattern (b) Phase difference and amplitude ratio (D = 2λ, θs = 20°, HPBW θ3 = 80°)
하지만 표적이 배열 전방 3차원 공간상에 존재할 경우에는 상기한 관계가 성립하지 않는다. Fig. 3은 가우시안 패턴을 갖는 네 개의 안테나를 Fig. 1과 같이 배열하였을 때, R/L 안테나 수신 신호의 진폭 비 a1, U/D 안테나 수신 신호의 진폭 비 a2를 갖는 방위각/고각 쌍을 각각 적색과 청색 선으로 나타낸 것이다.

그림에서 배열 전방 전반구(frontal hemisphere) 영역의 흑색 실선은 지구의 위/경도와 유사한 형태로써, 수평방향 흑색 실선은 동일 고각, 수직방향 흑색 실선은 동일 방위각을 갖는다. 동일한 진폭 비 a2를 갖는 방위각/고각 쌍(청색 실선)들에서 방위각에 따라 고각 값에 차이가 존재하는 위 결과로부터, 진폭 비교 기법은 간섭계와는 달리 상하 안테나의 수신 신호만으로는 표적의 고각을 특정할 수 없음을 알 수 있다. 또한 동일한 진폭 비 a1를 갖는 방위각/고각 쌍(적색 실선) 결과는 표적의 방위각과 진폭 비 간 관계 역시 단순하지 않음을 나타낸다.
공간분할테이블을 이용한 방향탐지 및 추적
3.1 공간분할의 목적
단원형배열안테나를 적용한 방향탐지 시스템의 정밀한 각도 추적을 위해서는 매우 정밀한 각도 추적 정확도가 필요하므로, 단원형배열안테나를 적용한 방향탐지 시스템은 간섭계 방식으로 표적의 방향탐지 및 추적을 수행하는 것이 적절하다. 하지만 위의 2장에서 기술한 바와 같이, 간섭계의 우수한 각도 추적 정확도 성능을 활용하기 위해서는 모호성 문제를 해결해야만 한다.
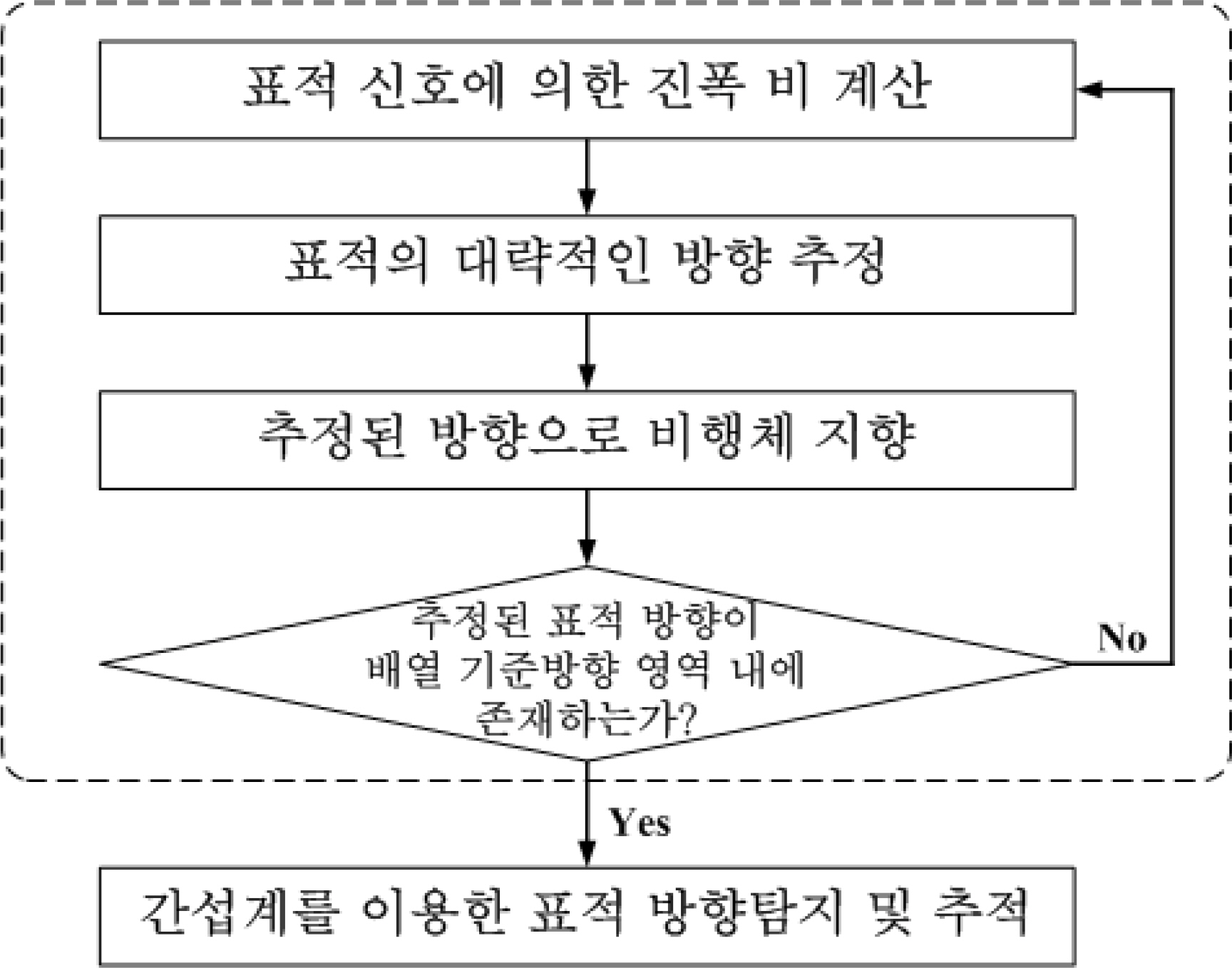
이에 본 논문에서는 진폭 비교 기법과 공간분할테이블[6]을 이용하여 배열 전방 3차원 공간상에서 간섭계 모호성을 제거하고자 한다. 2장에서 언급한 바와 같이 배열 전방 3차원 공간상에서는 표적의 방위각/고각과 진폭 비 사이에 단순한 선형 관계가 성립하지 않으므로, 본 논문에서는 배열 전방의 공간을 여러 개의 영역으로 분할한 후 진폭 비를 이용하여 어느 영역에 표적이 존재하는지를 판단하는 방안을 제안하였다. 표적이 존재하는 영역을 찾고 해당 영역 방향으로 방향탐지 시스템을 탑재한 비행체를 지향하는 절차를 반복적으로 수행함으로써 배열 기준방향 부근 영역으로 표적을 위치시킬 수 있으며, 이는 모호성 문제를 해결하여 간섭계 방식으로 표적의 방향탐지 및 추적을 수행할 수 있게 한다. 예를 들어, Fig. 2와 같은 경우, 배열 기준방향(0°)을 중심으로 ±14.4° 이내에 표적이 위치하게 하면 간섭계 적용 시 모호성 문제가 발생하지 않게 된다.
3.2 공간분할격자
Fig. 5와 같이 배열 전방의 3차원 공간상에 배열의 기준방향과 θSD,m (m = 1, …, M)의 각을 갖는 점들을 연결한 원뿔 Ωm을 생성한다. Ω1 내부의 영역을 첫 번째 분할 레벨, Ωm과 Ωm-1 사이의 영역을 m 번째 분할 레벨이라 하고, 각 레벨의 크기 dm을 식 (4)와 같이 정의한다.

이 때, 첫 번째 분할 레벨의 크기 d1는 배열 기준방향 영역의 크기를 결정하므로 간섭계 모호성이 발생하지 않는 각도 범위(± θua)를 참고하여 정해야한다. 배열 기준방향을 중심으로 ± θua 이내에서 모호성이 발생하지 않는 경우 d1 = 0.8 θua 정도로 설정한다. 또한 상기한 반복적인 표적 존재 영역 탐색 및 비행체 지향 작업의 효율을 향상시키기 위하여, 분할 레벨 m 이 증가할수록 분할 레벨의 크기 dm을 점차 증가시킴으로써 배열 기준방향에서 멀어질수록 분할 영역의 크기가 커지도록 한다. 이 때, 생성된 분할영역의 형태가 정사각형에 가깝도록 dm의 증가폭을 정하는 것이 바람직하다.
배열의 중심을 원점으로 하는 반지름 1의 구를 가정하고, 그 구와 원뿔 Ωm이 교차하는 원을 Cm이라 한다. 원 Cm은 2πsin θSD,m의 둘레를 가지며, 이를 N 등분 하는 점들이 공간분할격자 구성을 위한 꼭짓점들이 된다. 이 때, 원 위의 점 사이의 간격을 분할 레벨의 크기와 비교하여 아래의 식 (5)를 만족하는 경우, 원을 2N 등분하여 꼭짓점들을 생성함으로써 분할영역 간의 크기 편차를 줄이도록 한다.
상기한 변수들을 조절함으로써 임의의 공간분할격자를 구성할 수 있으며, 본 논문에서는 상기한 변수들을 M = 8, N = 8, θSD,1 = 6°, θSD,2 = 12°, θSD,3 = 20°, θSD,4 = 30°, θSD,5 = 42°, θSD,6 = 56°, θSD,7 = 72°, θSD,8 = 90°로 설정하여 Fig. 6과 같은 공간분할격자를 구성하였다.
3.3 공간분할테이블
설명의 편의를 위하여 Fig. 6에는 네 개의 안테나를 배열하여 두 개의 진폭 비교 축(R/L축, U/D축)만을 나타내었으나, 방향탐지 성능 향상을 위해 안테나를 추가하여 진폭 비교 축의 수(K)를 증가시킬 수 있다. 이 때, 분할영역의 수는 진폭 비교 축의 개수와는 관계없이 상기한 M, N의 값에 따라서만 결정된다. Fig. 7은 RU/LD축과 LU/RD축이 추가되어 네 개의 진폭 비교 축을 갖는 경우를 나타낸다.

표적 신호의 특성 벡터 T → R j →
여기서, ti는 표적 신호에 의한 i번째 진폭 비교 축의 dB 단위 진폭 비를 의미한다. ri,j는 j번째 분할 영역에 대한 i번째 진폭 비교 축의 dB 단위 진폭 비를 의미하며, ri,j에 대한 상세한 설명은 3.3.1 ~ 3.3.3절에 기술한다.
표적 신호의 특성 벡터 T → R j → T → R j →
표적이 존재할 것으로 예상되는 분할 영역을 결정하면, 해당 분할 영역의 방향 벡터 D j → D j → D j → D j →
실제 표적의 방향과 추정 방향 D j →
실제 방향탐지 시스템 적용 시에는, 공간분할격자 구성 후 각 분할영역의 방향벡터를 구하고 단원형배열안테나 제작 후 측정을 통해 각 분할영역의 특성 벡터를 구하여 아래 Table 1과 같은 공간분할테이블을 생성한다. 생성된 공간분할테이블을 사전에 방향탐지 시스템에 장입한 후 실제 운용 시 이를 활용함으로써 표적에 대한 방향탐지 및 추적을 수행하게 된다.
Table 1.
Space division table (M = 8, N = 8 case)
| 분할영역 | 방향 벡터 | 특성 벡터 |
|---|---|---|
| 1 |
|
|
| 2 |
|
|
| ⋮ | ⋮ | ⋮ |
| 89 |
|
|
분할 영역은 영역을 구성하는 꼭짓점의 수, Z에 따라 배열 기준방향 영역(Z = N), 일반 영역(Z = 4), 재분할 발생 영역(Z = 5)의 세 가지로 구분할 수 있으며, 각 영역에 대한 상세한 설명과 R j →
3.3.1 배열 기준방향 영역
배열 기준방향 영역은 공간분할테이블의 1번 분할영역으로서, 이 영역 내에 표적이 위치할 경우 간섭계 모호성 문제가 발생하지 않는다. 배열 기준방향에서는 진폭 비교 축에 관계없이 0 dB의 진폭 비 값을 가지므로, 상기한 식 (7)의 ri,1은 다음과 같다.
3.3.2 일반 영역
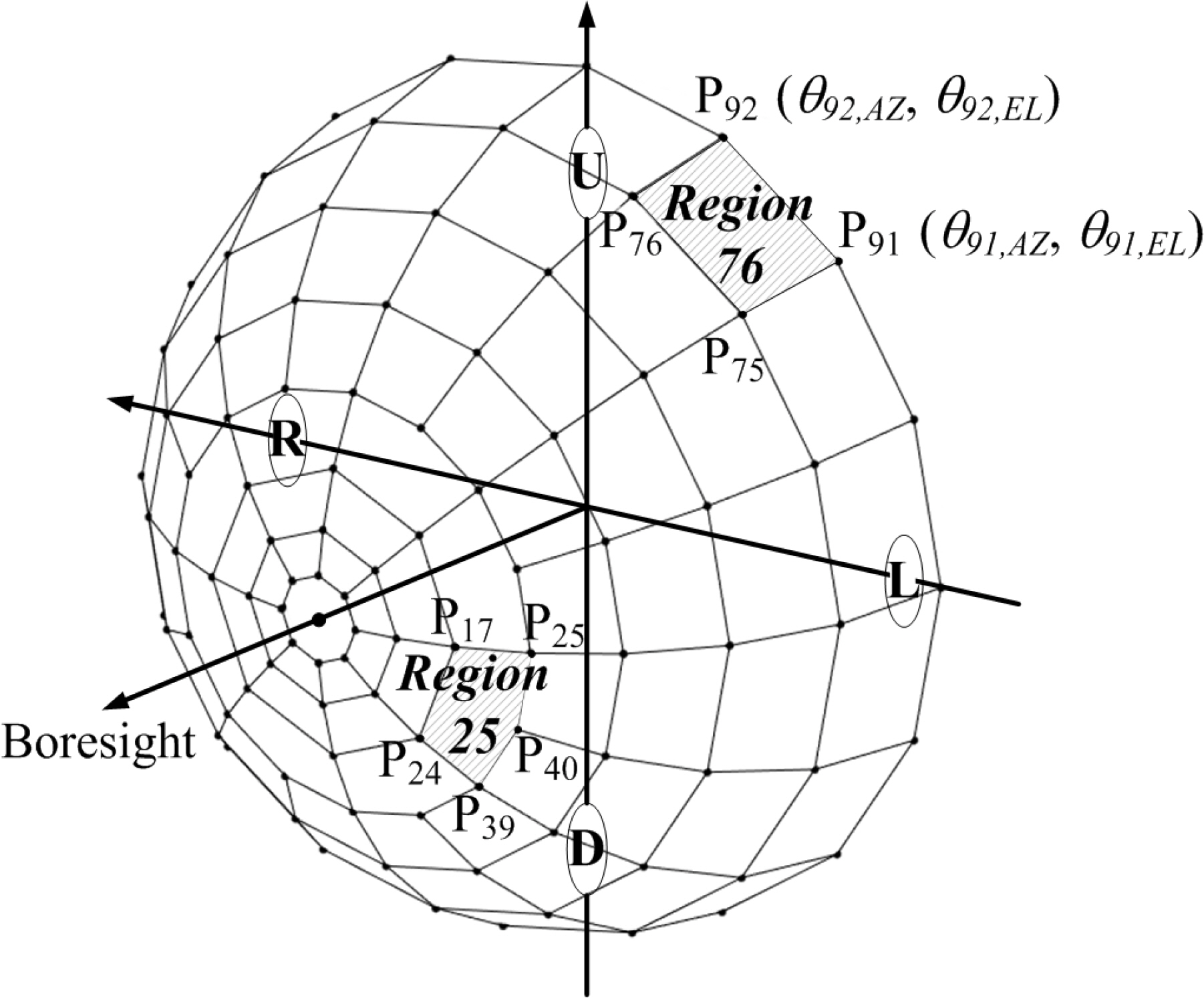
공간분할격자로 분할되는 대부분의 영역은 네 개의 꼭짓점으로 구성된 일반 영역이다. 일반영역의 경우, 영역을 구성하는 네 꼭짓점에서의 진폭 비를 이용하여 분할 영역의 특성 벡터 R j →
표적이 P a →
예를 들어, Fig. 6과 같이 두 개의 진폭 비교 축(R/L 축, U/D축)이 존재하는 경우, 첫 번째 진폭 비교 축을 R/L축, 두 번째 진폭 비교 축을 U/D축이라 하면, P75‒P76‒P91‒P92로 구성되는 일반 영역의 특성 벡터 R 76 → [ a 1.75 + a 1.76 + a 1 , 91 + a 1 , 92 4 , a 2 , 75 + a 2 , 76 + a 2 , 91 + a 2 , 92 4 ]
3.3.3 재분할 발생 영역
상기한 바와 같이 식 (5)를 만족하는 경우, 공간분할격자 구성을 위한 꼭짓점 생성 방법이 달라짐으로 인하여 Fig. 6의 25번 영역과 같이 다섯 개의 꼭짓점으로 구성되는 분할 영역이 발생하게 된다. 이 때, 다섯 개 꼭짓점의 진폭 비를 모두 이용하여 특성 벡터를 계산하면 배열 기준방향과 먼 쪽으로 특성 벡터에 치우침이 존재할 수 있으므로 영역 외곽의 네 개 꼭짓점만을 이용하여 특성 벡터를 계산한다. 예를 들어, Fig. 6의 경우, P17‒P24‒P25‒P39‒P40로 구성되는 재분할 발생 영역의 특성 벡터 R 25 →
방향탐지 및 추적 시뮬레이션
4.1 시뮬레이션 변수 설정
상기한 공간분할테이블을 이용한 방향탐지 및 추적 알고리즘에 대하여 Monte Carlo 시뮬레이션을 통해 성능을 확인하였다. 배열 기준방향 ±75° 범위에 표적의 초기 방향을 random하게 설정하고, 신호 대 잡음비(SNR)는 5 ~ 30 dB로 하였다. 진폭 비교 축의 수 K 는 2, 4의 두 가지로 하였으며, 진폭 비교 축이 2개인 경우 R/L축과 U/D축, 4개인 경우는 이에 더하여 대각선 방향으로 RU/LD축과 LU/RD축을 추가로 설정하였다. 배열을 구성하는 안테나 소자의 방사 패턴은 80° 및 100° 3 dB 빔 폭(θ3dB)의 가우시안 패턴을 가정하였으며, 진폭 비교 적용을 위한 안테나 기움각(θs)은 15° 및 20°로 두었다. 또한 안테나 간 이격거리 d는 0.24 m 및 0.48 m로 두었다. 각 경우에 대하여 2,000회의 시뮬레이션을 수행하여 표적이 배열 기준방향 영역(1번 분할영역) 내로 위치하기까지 필요한 횟수를 구하였다.
4.2 시뮬레이션 결과
아래의 Fig. 7은 SNR 30 dB, 진폭 비교 축 4개, 안테나 소자의 3 dB 빔 폭과 기움각이 각각 80° 및 20°인 경우에 대하여, 표적의 초기 방향이 방위각 40°, 고각 50°일 때의 방향탐지 및 추적 과정을 나타낸다. 초기 표적의 방향은 Fig. 7의 청색 원으로 표시하였다. 표적으로부터의 수신 신호를 이용하여 상기한 식 (8)에 따라 표적이 60번 분할영역에 위치함을 계산하여 비행체를 D 60 → D 5 →
Table 2~9는 진폭 비교 축의 수(K) 및 SNR에 따른 반복 횟수를 비교하고 있다. 표로부터 SNR이 높을수록 반복 횟수가 감소함을 알 수 있으며, 이는 표적이 존재하는 분할 영역을 결정할 때 표적으로부터의 수신 신호의 세기가 잡음에 비하여 강할수록 표적이 존재하는 분할 영역을 정확히 결정할 수 있기 때문으로 판단된다. 또한 동일한 SNR을 갖는 경우 진폭 비교 축의 수를 증가시켜 반복 횟수를 줄일 수 있음을 확인하였다. 이에 단원형배열안테나를 적용한 방향탐지 시스템 운용 시, 운용 환경을 고려하여 SNR이 낮을 것으로 예상되는 경우 진폭 비교 축의 수를 증가시키는 것이 보다 효율적일 것으로 판단된다.
Table 2.
Number of iterations (θ3dB = 80°, θs = 15°, d = 0.24 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 6.31 | 3.29 | 2.24 | 1.89 | 1.70 | 1.65 |
| 4 | 4.77 | 2.74 | 2.02 | 1.77 | 1.65 | 1.62 |
Table 3.
Number of iterations (θ3dB = 80°, θs = 20°, d = 0.24 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 4.97 | 2.95 | 2.15 | 1.84 | 1.68 | 1.63 |
| 4 | 3.71 | 2.44 | 1.97 | 1.75 | 1.65 | 1.61 |
Table 4.
Number of iterations (θ3dB = 100°, θs = 15°, d = 0.24 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 9.08 | 3.88 | 2.32 | 1.82 | 1.68 | 1.60 |
| 4 | 5.36 | 2.79 | 1.98 | 1.73 | 1.63 | 1.60 |
Table 5.
Number of iterations (θ3dB = 100°, θs = 20°, d = 0.24 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 6.44 | 3.06 | 2.15 | 1.76 | 1.66 | 1.62 |
| 4 | 3.88 | 2.37 | 1.89 | 1.68 | 1.60 | 1.57 |
Table 6.
Number of iterations (θ3dB = 80°, θs = 15°, d = 0.48 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 4.95 | 2.85 | 2.13 | 1.82 | 1.69 | 1.62 |
| 4 | 3.72 | 2.35 | 1.93 | 1.76 | 1.66 | 1.60 |
Table 7.
Number of iterations (θ3dB = 80°, θs = 20°, d = 0.48 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 4.99 | 2.94 | 2.09 | 1.82 | 1.69 | 1.64 |
| 4 | 3.69 | 2.42 | 1.96 | 1.76 | 1.65 | 1.63 |
결 론
이 논문에서는 단원형배열안테나에서 배열 전방의 3차원 공간에 대한 간섭계 모호성 문제를 해결하기 위하여, 공간분할테이블의 개념을 제안하고 이를 이용한 표적의 방향탐지 및 추적 방안에 대하여 기술하였다. 또한 다양한 경우에 대한 Monte Carlo 시뮬레이션[7]을 통하여 제안한 방법이 성공적으로 동작함을 확인하였다.
이를 통하여 본 논문에서 제안한 방법을 이용해 표적 방향탐지 및 추적 시스템 구축 시 비행체 노즈부를 다른 목적으로 활용할 수 있음을 확인하였다. 공간분할테이블 생성 시 필요한 사전 측정의 횟수 및 방향탐지 시스템에 공간분할테이블을 장입하는데 소요되는 메모리는 분할 영역의 수와 비례하며, 제안한 알고리즘의 효율은 공간 분할 형태에 의해 영향을 받으므로, 향후 최적의 공간 분할 방안에 대한 연구가 필요할 것으로 판단된다.




