고기동 항공기 하부 장착 파드의 공력 및 관성하중 분석 연구
Analyses on Aerodynamic and Inertial Loads of an Airborne Pod of High Performance Fighter Jet
Article information
Abstract
Abstracts
A fighter performing a reconnaissance mission is equipped with a pod that drives optical/infrared sensors for acquiring and identifying target information on the lower part of the fuselage. Due to the nature of the reconnaissance mission, the fighter performs high speed evasive maneuvers, and the resulting load should be considered importantly for the development of the pod. This paper concerns a numerical investigation into the inertial and aerodynamic loads of the airborne pod of high performance aircrafts. For the aerodynamic load analysis, the pylon and pod shapes are added to the fighter 3D model, and the commercial software was used for static and dynamic analysis. Considering the practical mission conditions, the common/extreme conditions were established respectively in the static and dynamic situations of pods and the driving torque could be tripled under dynamic conditions. In the analysis of inertia load, a 3-DOF model considering roll and turning maneuvers was derived by the Lagrangian method, and then the numerical integration method was applied to the analysis. As a results, it was conformed that the inertia load was generally induced at a low level compared to the aerodynamic load, but depending on the unbalance mass condition of the pod, the inertia load cannot be negligible.
기호 설 명

1. 서 론
전투기는 작전 임무 수행 시 동체 및 날개 하부에 탑재체로 통칭되는 각종 무장, 연료탱크, 파드를 장착한 상태에서 고속으로 기동한다. 전투기는 고유의 비행 한계 및 각 탑재체의 탑재 위치, 중량, 수량 등에 따라 비행기동이 제한되며 전투기 날개만의 공력이 아닌 무장 자체의 공력특성과 간섭이 존재한다[1]. 이런 상호작용으로 인하여, 전투기 하부에 장착하는 파드의 설계 및 개발 시에는 탑재 비행체의 임무환경이 동시에 고려되어야 한다.
파드는 공중 및 지상 표적을 탐지·식별하기 위해 고해상도 영상을 생성하고, 조종사가 지정한 표적을 추적하여, 표적 좌표 생성 및 LGB(laser guided bomb) 투하를 위한 레이저 조사 등에 활용되며, 각종 영상 정보를 지상국에 전송하기도 하는 중요한 임무를 수행하게 된다. 그러므로 파드의 설계·개발 시에는 시스템의 요구성능을 보장하기 위하여 전투기와의 적합성(compatibility)을 입증하는 것이 매우 중요하다[2].
전투기 하부에 탑재되는 파드의 전산 수치해석은 설계, 개발, 운용 등의 영역에 대하여 다양하게 수행되어 왔다. Lee et al.[3]은 파드의 유한요소모델을 이용하여 고유진동수 및 모드형상을 해석하고 이를 실험값과 비교함으로써 파드 동특성 모델을 개발 검증하는 연구를 수행하였으며, Lee and Lee[4]는 파드 내부의 카메라 모듈의 진동특성을 해석하기 위한 3차원 유한요소모델을 생성하고 고유진동 해석값을 실험값과 상호 검증한 바 있다. Park et al.[5]은 파드 구조물의 플러터 현상 등 동특성 안정성을 예측하기 위한 연구를 수행하였다. Jang and Yu[6]는 정상 유동장 조건에서 외부 돌출된 파드에 의한 발생 공력을 해석하는 연구를 수행하였다. O’Brien et al.[7]과 Godiksen[8]은 전투기에서 무장분리 시, 흡입구와 파드 주변의 공력상태를 해석하여, 파드의 무장분리 영향성을 해석하는 연구를 수행하였다. Kim et al.[9]은 항공기용 파드 설계 및 개발 과정에서 제공된 요구도 조건에서 비행 안전과 관련된 환경, 전자기 시험 등을 검토하는 연구를 수행한 바 있다. 그러나 기존 연구들 가운데, 전투기의 정찰임무 수행 중 회피기동을 고려한 고기동 상황 조건하에서, 파드의 공력 및 관성하중을 종합적으로 해석한 연구는 상대적으로 부족하다. 파드 내부의 영상 측정부는 정확한 영상정보 획득을 위하여, 목표 지점을 포착한 후 이를 전투기 회피/선회 기동상황에서도 지속적으로 안정하게 유지하여야 한다. 만약 영상 측정부를 회전시키는 모터 구동부의 토크가 부족하면 급격한 롤기동 및 선회기동 등의 고기동 하에서 목표물을 놓칠 수 있으며, 과다한 모터 토크 선정은 파드의 무게 및 내부 부품 배치에 영향을 미치게 된다. 따라서 구동부 모터의 토크 선정을 위한 정확한 파드 하중 분석이 요구된다. 회전토크에 영향을 미치는 요인은 영상 측정부의 관성모멘트, 하네스(harness) 또는 실(seal)과의 마찰, 파드 불균형 질량, 공기하중 등을 고려할 수 있다.
본 연구는 초기 설계단계 시 고기동 비행환경에서 영향정보 획득을 위하여 장착한 하부 노출 파드에 부가되는 공기역학적, 운동역학적 하중을 분석하였다. 장착 전투기와의 적합성을 위해서 실제적인 정적·동적 환경을 부여하고 파드가 견뎌야하는 공력하중을 계산하였으며, 운동역학적 분석은 파드를 장착한 전투기가 일정한 고도를 유지한 상태에서 롤기동과 선회기동을 수행하는 가정 하에 3자유도 단순화 모델링 후, 운동방정식을 유도하고, 파드 헤드부에 부가되는 회전모멘트를 해석하였다.
2. 파드 형상
전투기는 연료탱크, 무장 및 파드를 장착할 수 있는여러 개의 스테이션(station)이 동체 및 날개에 있으며, 항법 파드, 타겟팅 파드 등은 일반적으로 동체 중앙 스테이션의 좌·우측에 탑재된다. 본 연구에서 파드와 파드 파일런이 전투기에 부착되는 위치는 각종 기술도서(technical orders)와 정비교범(organizational maintenance) 및 실사 등을 참조하여 설정하였으며 Fig. 1과 같이 동체의 우측에 위치한 것으로 설정하였다.
Location of pod at KAFA fighter jet
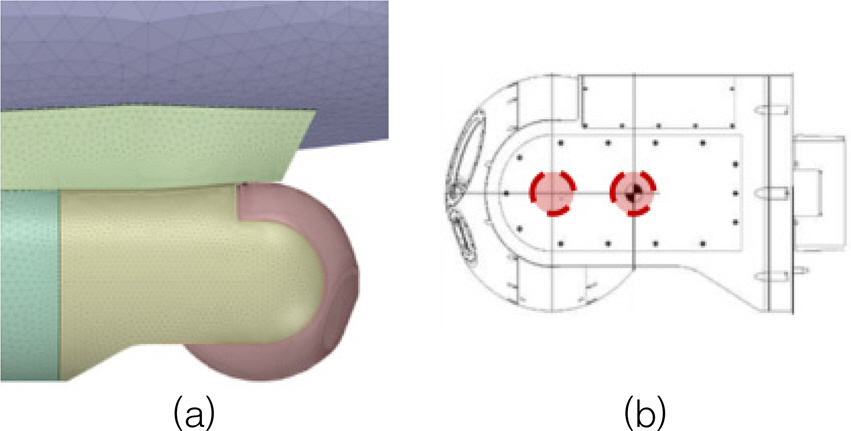
파드는 Fig. 2(a)와 같이 크게 EO/IR 센서가 위치해 있는 헤드(head)와 전장 장비가 위치해있는 바디(body)로 구성된다. 특히 헤드부는 피치(pitch) 운동을 담당하는 구형 부분(Fig. 2(b), 이하 볼(ball) 이라고 표현)과 roll 운동을 담당하는 부분(Fig. 2(c), 이하 로테이터(rotator)로 표현)으로 구분이 된다.
Pod geometry and parts: (a) pod geometry, (b) ball, (c) rotator, (d) pylon
실제 환경에서 파드의 볼과 로테이터 부위도 구동이 가능하기 위해 일정 이격(gap)이 존재한다. 이격의 유무에 따라 파드가 받는 공력하중 해석에 영향이 있으므로 Fig. 2(d)와 같이, 파드의 볼과 로테이터, 그리고 파드 파일런(pylon) 사이 이격이 구현된 형상으로 파드의 전산해석이 진행되었다.
3. 정적 공력하중 해석
3.1 KAFA 전투기 형상 풍동실험 검증
3.1.1 KAFA 전투기 풍동실험 및 전산해석 조건
전산해석을 통해 얻게 되는 공력하중 값의 신뢰성 및 타당성 검증을 위해 공군사관학교 전투기(이하 KAFA 전투기로 칭함) 모델 공력계수의 전산해석 결과와 풍동실험 결과를 상호비교하였다. KAFA 전투기 모델은 풀 사이즈 모델의 17 % 정도 크기에 해당하며 모델의 제원은 Table 1과 같다.
Specification of KAFA wind tunnel model
KAFA 전투기 모델의 재질은 알루미늄이며 2축 스트러트(strut)에 맞도록 제작되었다. 풍동실험 시 전방 스트러트를 상하로 이동하면서 받음각을 변화시켜가며 실험을 수행하였다.
전산해석을 위한 solver는 상용프로그램인 ANSYS Fluent 2020R1 Solver를 사용하였으며 수치해석 및 solver 조건은 Table 2에 정리하였다.
Numerical condition and solver settings
3.1.2 풍동시험 및 전산해석 결과
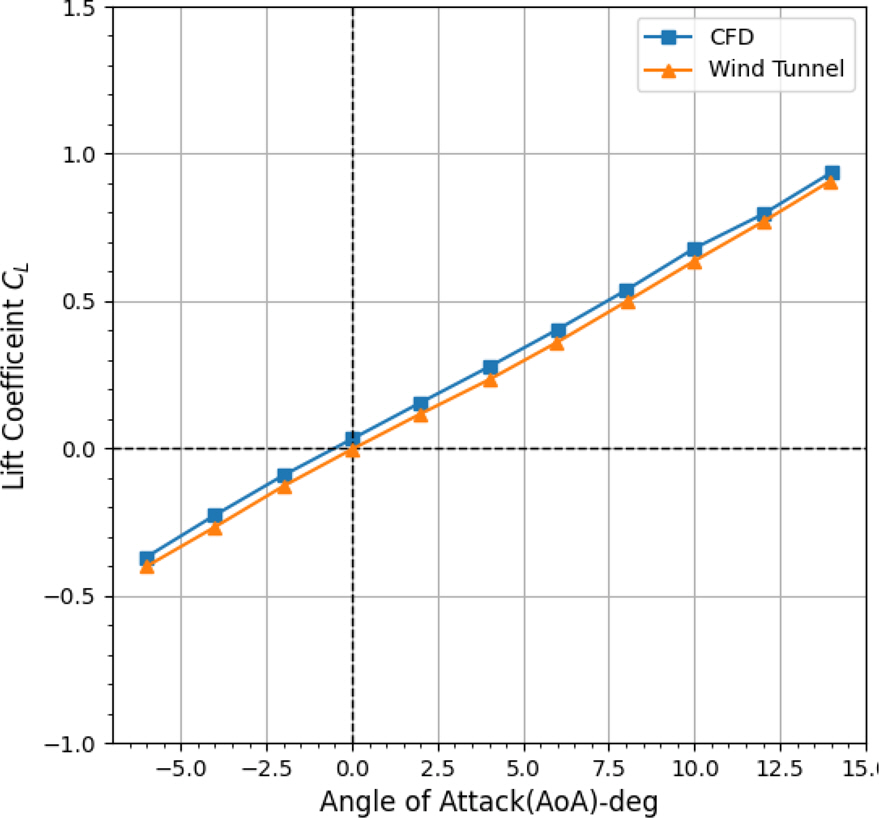
전산해석 결과와 풍동실험 결과를 비교하기 위해 KAFA 전투기 모델의 기하학적 상사성과 격자 품질에 대한 검증을 수행하였다. 주어진 받음각 범위에서 실속 현상이 발생하지 않아 양력계수는 받음각과 선형의 관계를 가지며 풍동시험을 통해 얻은 −6~14 deg의 받음각 범위에서 KAFA 전투기의 양력계수 기울기는 6.49×10−2/deg으로 전산해석을 통해 얻은 양력계수 6.46×10−2 /deg와 비교하여 0.46 % 가량의 미미한 오차를 보였다.(Fig. 3)
3.2 전투기 파드 비행하중 해석
3.2.1 정적 비행하중 해석 조건
파드의 공력 하중 예측을 위해 연료와 파드만 탑재된 상태의 전투기로 고기동이 가능한 실제 조건을 상정하고 비행한계 범위를 기술도서를 참고하여 Table 3의 조건 및 최대 가속 하중배수는 7.33 g를 적용하였다.

Flight envelope of KAFA fighter jet
지상 표적을 탐지 및 획득하기 위한 고해상도 영상을 생성하는 파드 장착 전투기의 공대지 임무고도를 고려하여 10,000~30,000 ft 범위에서 무장투하 후 가장 빠른 선회율(turn rate)로 복귀하는 상황을 가정하였으며 하중배수 조건들은 기술도서에 근거하였다.
정적하중 해석 조건은 최대 선회율 조건(maximum turn rate condition)과 극한조건(extreme condition)으로 경우를 나누어 설정했다. 최대 선회율 조건은 파드만 장착 중인 전투기가 최대 하중배수 한계인 7.33 g 내에서 선회율이 가장 빠른 지점을 의미한다. 공대지 타격 후 가장 빠르게 선회하여 이탈하는 상황을 가정하였으며 Fig. 4는 중량 26,000 lb의 KAFA 전투기의 에너지 기동 선도(energy maneuver diagram)으로 빨간 원으로 표시된 부분이 최대 선회율 조건에 해당하는 지점이다.

Energy maneuver diagram of KAFA fighter jet
극한조건은 전투기가 7.33 g의 하중배수에서 최대 후기연소기(max afterburner)의 사용으로 최대 비행속도로 선회 중인 비행조건을 의미하며 파드에 가장 큰 하중 부하가 있을 것으로 예측되는 지점이기도 하며 Fig. 4에 초록색 원으로 표시된 지점이다.
정적 비행하중 해석을 하기 위한 전산해석 조건은 Table 4와 같다. Poly-hexcore 격자를 통해 격자수를 대폭 감소시켰으며 SST k-ω 난류모델을 통해 경계층이 있는 외부유동에서 공력해석의 정확성을 제고하였다.

Numerical condition
3.2.2 정적 비행하중 해석 결과
파드에 부하되는 실제적인 하중 해석을 위해 파드 구동부(Fig. 5(a))의 정적 하중해석을 진행하였다. 파드구동부의 볼(ball, Fig. 2(b))의 모멘트 중심 위치는 (4.4948, 0.4064, 1.133) 설정하였다.
(a) Moving part of pod and (b) c.o.g location
Fig. 6(a)에는 최대 선회율 조건 하 전투기와 전투기 파드의 절대압력 contour를 표시하였다. 고도가 증가할수록 밀도가 낮아지며 고도별 선회율이 가장 빠른 지점의 속도가 증가하고 천음속 구간에 도달하여 국소적인 충격파 및 팽창파를 수반하며 파드 주변의 공력과 모멘트에 영향을 미치는 것을 관찰할 수 있다.
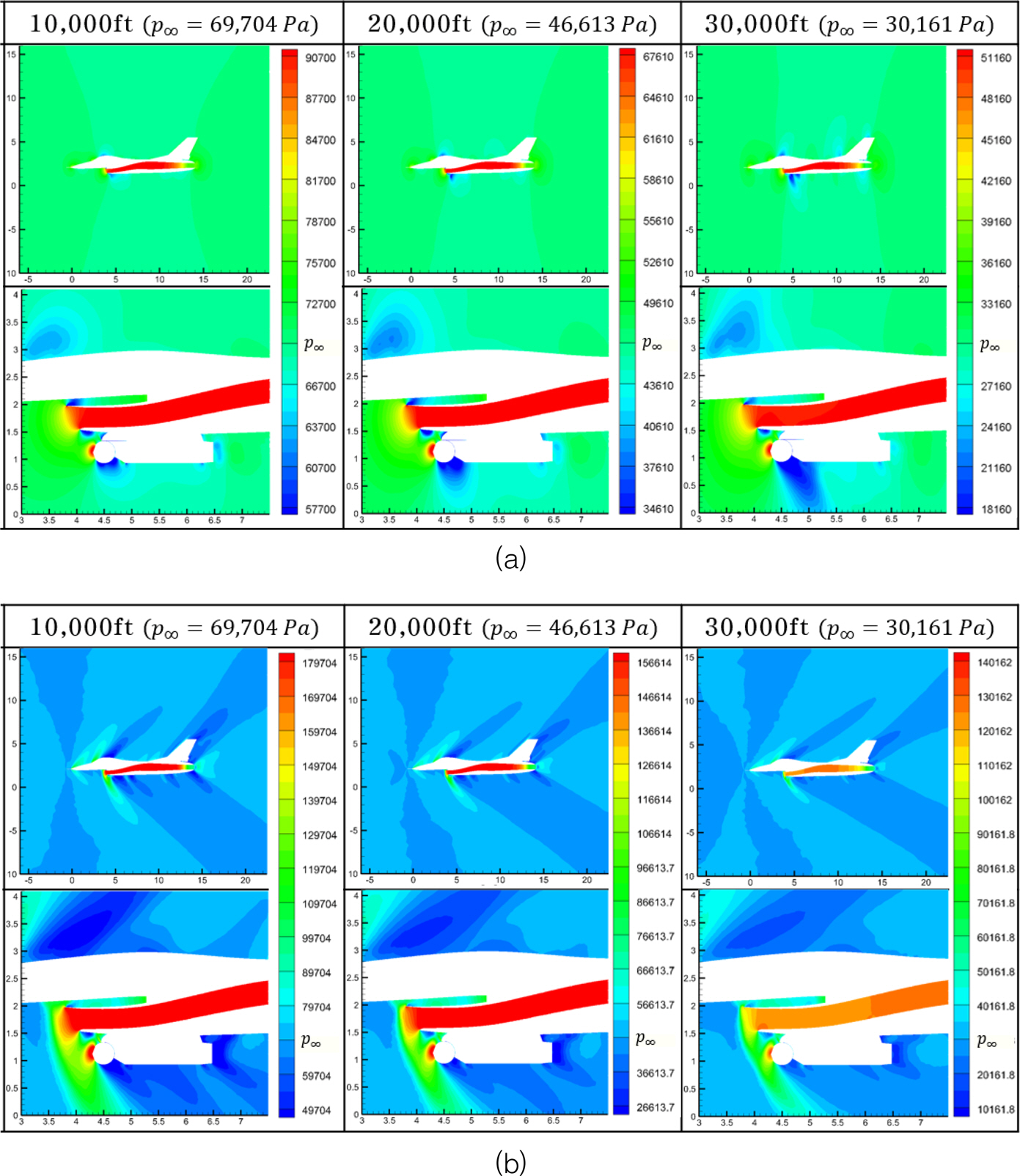
Absolute pressure contour at different altitude of pod under (a) common, (b) extreme condition
최대 선회율 조건은 30,000 ft 지점을 제외하고는 최대 하중배수한계 내 KAFA 전투기의 선회율이 가장 빠른 지점으로 설정하였으므로 Table 3 조건에서 운용고도가 선형적으로 증가하더라도 파드 공력에 영향을 미칠 동압의 크기와 상관관계는 미비하다. 30,000 ft에서는 최대 선회율 조건을 만족하기 위해 7.33 g가 아닌 6.8 g로 기동중인 상황을 가정하여 동압은 상대적으로 다른 고도에 비해 낮다.
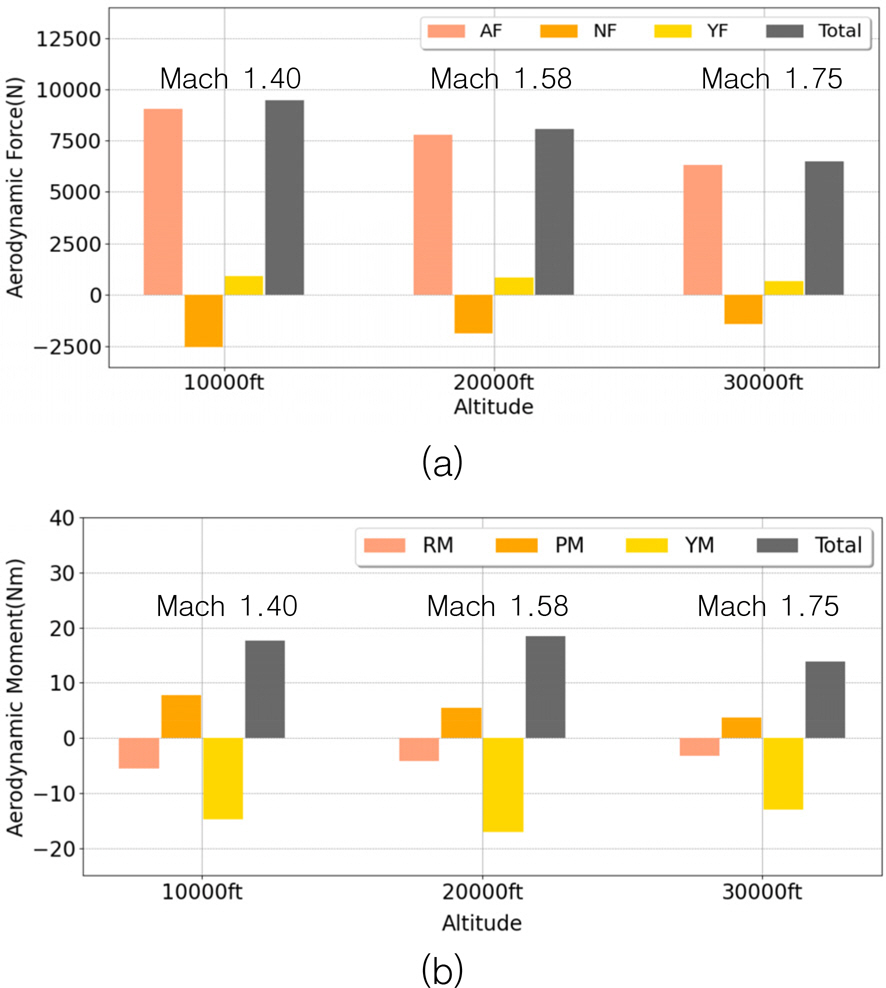
Fig. 7은 볼의 공력과 공력모멘트를 나타낸 그래프이며 Fig. 7(a)에는 고도에 따른 수직력(NF), 축력(AF), 측력(YF)을, Fig. 7(b)에는 고도에 따른 롤링모멘트(RM), 피칭모멘트(PM), 요잉모멘트(YM)를 표시하였다. 각각의 그래프에는 힘과 모멘트의 절대 크기를 나타내는 ‘Total’로 표시된 절대값을 표시하였는데 이는
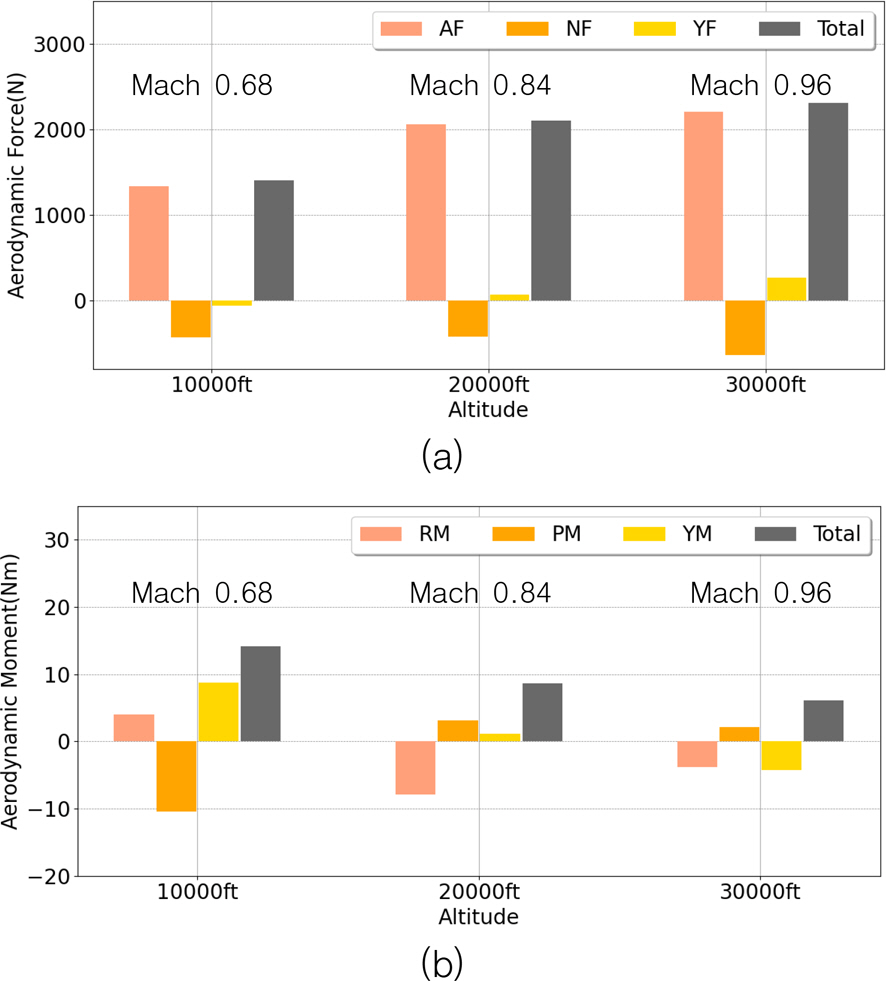
Force & moment at different altitude of ball (common condition): (a) force-altitude graph, (b) moment-altitude graph
공기역학적 힘과 모멘트로 인한 공력하중을 대략적으로 예측하기 위함이다.
Fig. 7(a)에서 축력의 영향이 전체 공력에 가장 큰 영향을 미치는 것을 알 수 있으며 볼이 느끼는 공력의 크기는 최대 선회율 조건(maximum turn rate condition)에서 약 2,000 N으로 예상된다.
Fig. 7(b)는 볼의 공력모멘트를 나타낸 것이며 그 크기는 10 N·m 내외로 예상된다. 파드의 경우 흡입구와 근접한 거리로 파드 구동부 정면 방향 평면 기준 비대칭적인 유동 흐름으로 인해 특정 방향 모멘트의 지배적인 영향성을 비교하기 어렵지만 공력의 크기와 같은 경향으로 고도에 따라 감소하고 있음을 볼 수 있다.
Fig. 6(b)에는 극한조건에서 전투기와 전투기 파드의 절대압력 contour를 표시하였다. 극한조건은 후기연소기가 사용된 상황에서 7.33 g의 하중 배수를 유지하면서 최대 비행속도를 갖는 지점을 설정하였다. 극한 조건에서는 고도가 증가함에 따라 동압의 크기가 감소하는 경향을 가지고 있으며 매우 고속의 조건에서 운행하므로 모든 고도에서 충격파를 수반함을 관찰할 수 있다.
절대압력 contour를 보면 흡입구 형상으로 인해 발생하는 충격파가 파드 유동에 직접적인 영향을 주며 이에 따라 파드의 공력하중에 큰 영향을 미칠 수 있음을 확인할 수 있다.
Fig. 8은 극한조건에서 볼의 공력과 공력모멘트를 나타낸 것이다. 동압의 크기가 고도에 따라 감소하는 형태로 일정한 경향성을 가지고 있음을 볼 수 있다.
Force & moment at different altitude of ball (extreme condition): (a) force-altitude graph, (b) moment-altitude graph
Fig. 8(a)의 히스토그램을 통해 극한조건에서 볼에 가해지는 공력의 크기는 10,000 N 내외가 될 것으로 예측된다. 이는 아음속 또는 천음속 영역의 최대 선회율 조건 상태의 볼의 평균 공력인 2,000 N 보다 5배 이상 큰 값이며 이는 충격파에 의한 영향 때문으로 판단된다. Fig. 8(b)를 보면 볼에 작용하는 공력모멘트 크기는 15 N·m 정도로 예상된다. 공력 모멘트 중에서도 요잉 모멘트의 영향이 큰데 흡입구의 충격파가 파드 좌측부의 압력을 우측보다 상대적으로 크게 증가시킴에 따라 요잉모멘트가 크게 영향을 받은 것으로 판단된다.
4. 동적 공력하중 해석
4.1 동적 비행하중 해석 조건
동적 비행하중 해석조건을 설정하기 위해 하중비행시험의 비대칭(unsymmetric) 기동을 고려하였다. 파드 장착 KAFA전투기의 최대 하중배수를 7.33 g로 상정하였으므로 받음각 0 deg에서 7.33 g에 해당하는 롤(roll) 각인 82.16 deg로 롤(roll)하는 전투기를 가정하였다.
정적하중 해석조건과 비슷하게 동적하중 해석조건은 일반조건(common condition)과 극한조건(extreme condition)의 두 가지 경우로 나누었다. 일반조건은 최대 롤 변화율이 167 deg/s인 조건이며, 극한조건은 최대 롤 변화율이 324 deg/s인 조건이며, 이는 전투기 기술도서 등을 근거하였다.
전투기가 롤 기동을 하게 된다면 Fig. 9에 나타난 바와 같이 원심력에 의해 파드에는 롤링 모멘트가 가해진다. 롤 기동 중에는 롤링모멘트에 의한 원심력이 영향을 미칠 수 있으며, 롤 기동 시작과 끝 부근의 큰 롤 가속도에 의한 접선력도 고려돼야 한다. 전투기는 수평비행 상황에서 82.16 deg의 선회각을 갖도록 롤 운동을 하게 되는데 이때 초기값(φ = 0 deg)과 최종값(φ = 82.16 deg)의 롤 각 변화를 연속적으로 나타내기 위해 계단함수의 일종인 sigmoid 함수를 개량하여 식 (1)과 같이 표현하였다. 식 (1)을 구성하는 파라미터값은 앞서 두 가지로 나눈 일반조건(common condition)과 극한조건(extreme condition)의 최대 롤 변화율(roll rate)을 만족시킬 수 있는 값을 찾아 구현하였으며, Fig. 10, 11은 각 조건에 따른 롤 각, 각속도, 각가속도를 시간 변화에 대하여 나타낸다.
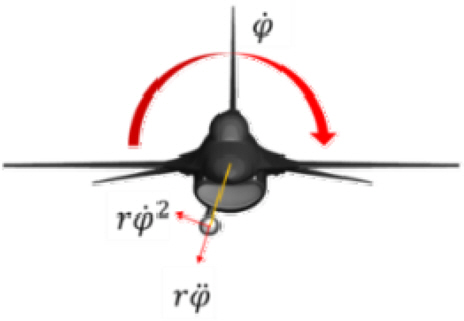
Roll motion of KAFA fighter jet
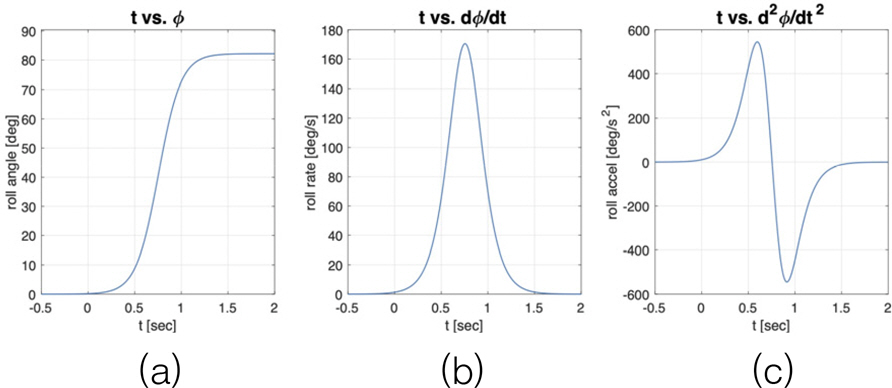
Modified sigmoid function for roll motion in common condition: (a) displacement, (b) velocity, (c) acceleration over time

Modified sigmoid function for roll motion in extreme condition: (a) displacement, (b) velocity, (c) acceleration over time
∗φf=82.16, a=8.13(common)/15.8(extreme), b=100, td=0.2
전투기의 동적 비행하중 해석을 위한 전산해석 조건은 앞서 정적 비행하중 해석의 20,000 ft 조건과 같다.
일반조건과 극한조건 모두 비정상 해석을 수행하였으며 physical time step은 0.002 s로 설정하였다. 롤 운동하는 전투기 모사를 위해 sliding mesh 기법을 활용하여 전투기 형상 주변에 전투기의 무게중심 축과 동일한 축의 원통형 공간 격자를 생성하였으며 이를 앞서 선정한 각속도로 회전시켰다. 실제 선회 기동 시 날개 양쪽 자유류 속도 차이가 발생하지만 최대 선회율 조건을 가정하여도 날개 양끝단에서 자유류 속도 차이는 1 % 이내로 계산 과정에서 고려하지 않았다.
원통형 공간 격자가 시간에 따라 회전하게 되면 원통형 공간 격자와 자유류 공간 격자가 만나는 곡면에서 표면 격자의 불일치가 발생하는데 이를 다루기 위해 해당 곡면을 interface 면으로 정의하였다. Interface 면에서 유동 변수 및 numerical flux를 interpolation 하면 표면격자의 불일치를 극복하고 비정상 해석을 수행할 수 있다. Fig. 12(a)는 KAFA 전투기 표면 격자이며 Fig. 12(b)는 비정상 해석을 위한 interface 면이다. Fig. 12(b)의 노란색 격자가 interface 면에 해당하며 이 표면이 회전시켜 비정상 해석을 수행하였다.
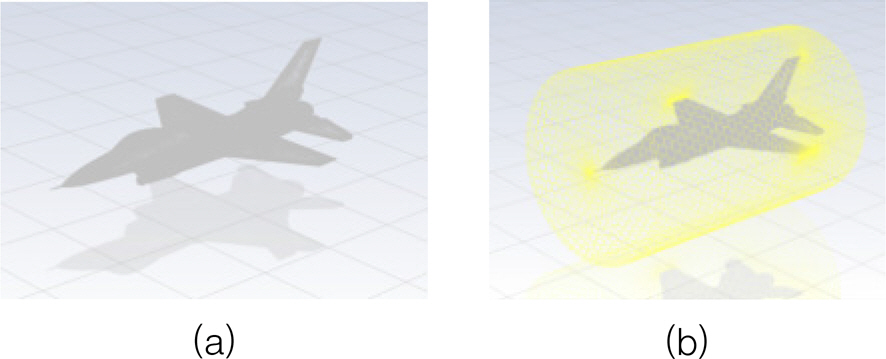
(a) Surface mesh of the fighter jet, (b) interface surface for sliding mesh
4.2 동적 비행하중 해석 결과
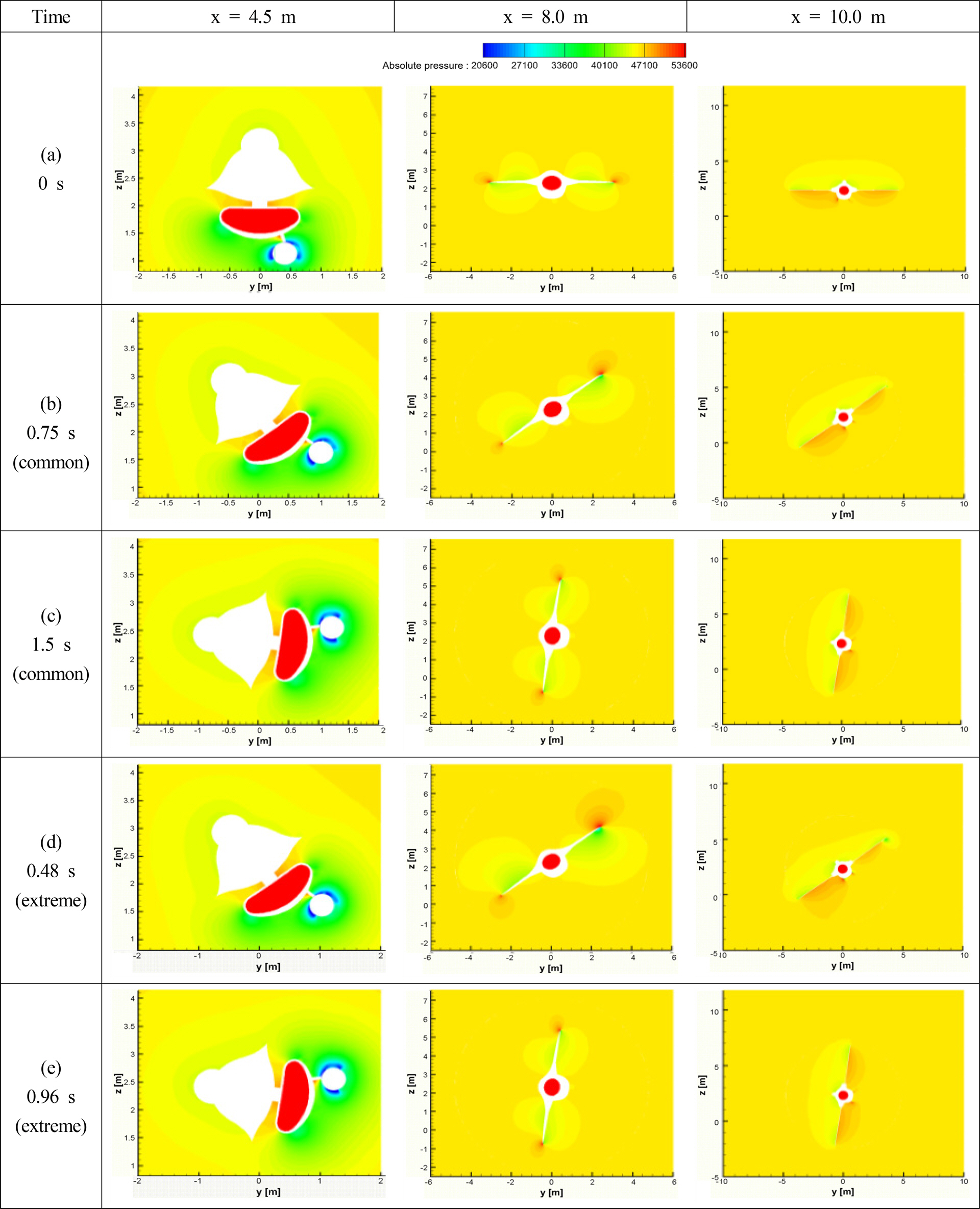
앞서 선정한 동적 비행하중 해석조건을 바탕으로 일반조건과 극한조건에 대해 전산해석을 수행하고 특정 yz 단면의 시간에 따른 압력 contour 및 공력 그래프를 도출하였다. Fig. 13은 시간에 따른 압력 contour 를 도출하기 위해 선정한 특정 yz 단면을 3차원으로 시각화한 것이다. 각각 × = 4.5 m, 8.0 m, 10.0 m에 해당한다. × = 4.5 m의 경우는 파드의 카메라 부분의 정중앙을 보여주며, × = 10.0 m의 경우는 전투기의 trailing edge 근처의 단면을 보여주고 있다. 마지막으로 × = 8.0 m의 경우는 전투기의 정중앙을 보여주고 있다.

Surface mesh of the fighter jet
Fig. 14.(a), (b), (c)는 일반조건에서 롤 기동 시 0, 0.75, 1.5초 지점에서 Fig. 13 위치의 KAFA 전투기 주변 압력 contour를 나타낸 것이다. 시간에 따라 전투기가 시계 반대 방향으로 회전하고 있음을 확인할 수 있다. 특히, 각속도가 점점 증가하는 0.6~0.9초 지점에서는 동체 및 날개 주변으로 비대칭적인 압력장이 형성되는 것을 볼 수 있다. 전투기의 우측 날개 상단과 좌측 날개 하단은 유동이 압축되는 것을 볼 수 있고 우측 날개 하단과 좌측 날개 상단은 유동이 팽창하는 것을 볼 수 있다. 그러나 파드 주변의 유동은 각속도가 증가하여도 크게 변하지 않는 것을 볼 수 있는데 그 이유는 전투기의 무게중심으로부터 파드까지의 길이가 짧아 롤 각속도에 따른 선속도가 매우 느리기 때문이다.
Angular displacement, rate and acceleration of the fighter jet over time
Fig. 14.(c), (d)는 극한조건에서 롤 기동을 하는 KAFA 전투기의 시간과 위치에 따른 주변 압력 따 압력 contour이다. 시간에 따라 전투기가 시계 반대 방향으로 회전하고 있음을 확인할 수 있다. 특히, 각속도가 점점 증가하는 0.36~0.6 sec 지점에서는 동체 및 날개 주변으로 비대칭적인 압력장이 형성되는 것을 볼 수 있다. 일반조건의 경우와 유사하게 전투기의 우측 날개 상단과 좌측 날개 하단은 유동이 압축되는 것을 볼 수 있고 우측 날개 하단과 좌측 날개 상단은 유동이 팽창하는 것을 볼 수 있으나 압축과 팽창 정도가 일반조건의 경우에 비해 강함을 알 수 있다. 각속도가 최대가 되는 0.48 s에서는 좌측 날개의 끝(wing tip) 부근에서 상대적으로 강한 wingtip vortex가 형성됨을 확인할 수 있다. 파드 주변의 유동은 일반조건의 경우와 마찬가지로 각속도가 증가하여도 크게 변하지 않는 것을 확인할 수 있다. 공력 하중의 경우, solver 특성상 reference frame에 대해 계산된 값이므로 이를 body frame에 대한 값으로 변환하였다. Fig. 15은 각각 body frame으로 변환된 일반조건과 극한조건에서의 시간에 따른 파드 구동부의 공력 하중 그래프이다.
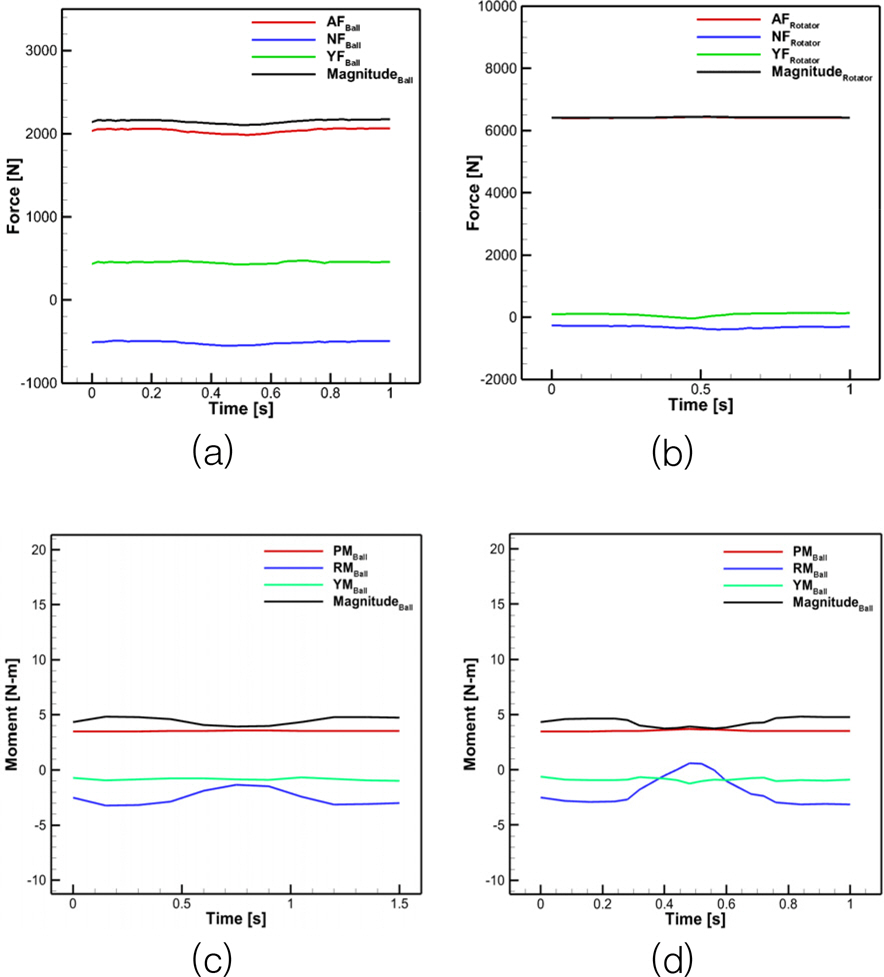
Aerodynamic force and moment of pod: (a) force of ball(extreme condition), (b): force of rotator(extreme condition), (c): moment of ball(common condition), (d): moment of ball(extreme condition)
Fig. 15에서 각 그래프의 양 끝단에 있는 지점은 롤 운동의 초기값(φ = 0 deg)과 최종값(φ = 82.16 deg)에서 계산된 공력 하중이다. KAFA 전투기가 선회를 시작하는 순간과 기동을 멈춘 순간은 각속도의 변화가 없으므로 정상상태와 동일한 상황이며 해당 그래프는 이를 나타내고 있다.
한편, Fig. 15(a), (b)는 극한조건 조건에서 볼과 로테이터의 시간에 따른 공력의 크기를 나타내는 그래프인데 시간에 대한 크기의 변화가 거의 없이 일정한 값을 나타낸다. 일반조건에서도 결과는 동일하게 시간과 관계없이 공력의 크기는 거의 일정한 값을 나타낸다. 이를 통해 일반 또는 극한조건에서의 공기역학적 힘은 파드 구동부에 대해 거의 변함이 없음을 알 수 있다.
Fig. 15(c), (d)는 각각 일반/극한 조건 하 시간에 따른 볼의 모멘트를 나타낸 것이다. 시간에 따른 변화가 미비한 공기역학적 힘과 유사하게 검은색으로 표시한 전체 모멘트 크기는 시간에 따른 변화가 미비하지만 롤 모멘트의 경우 시간에 따른 크기에 유의미한 변화가 있다. 일반조건보다 극한 조건에서 롤 모멘트의 크기가 급격하게 변화하는 것을 확인할 수 있는데 이는 각속도의 변화가 극심한 극한조건의 각변화구간에서 (Fig. 11) 각속도가 증가함에 따라 파드 주변 유동의 압축 및 팽창 정도가 커지기 때문이다.
Fig. 15(c), (d)를 통해 파드 구동부는 전투기의 급격한 롤 운동으로 인해 롤 모멘트 크기 변화가 커질 수 있다. 총 모멘트의 절대값 크기의 변화는 미비하지만 실제 파드가 노출되는 운용환경에 따라 파드가 받는 모멘트는 달라질 수 있으며 설계 시 이에 대한 고려가 선행되어야할 것이다.
5. 동적 관성하중 분석
공력하중과 더불어, 공력의 효과를 제외한 기체와 파드 간의 운동학적 분석을 통하여, 동적 관성하중을 분석하였다. 이를 통하여, 롤 기동 및 선회기동 시에, 파드 헤드부에 부가되는 회전관성 모멘트를 분석하는 것을 목표로 한다. 연구방법은 관성 좌표에서 기체와 파드의 좌표를 정의하고, 라그랑지안(Lagrangian) 방법 이용하여 운동방정식을 유도하고, 수치적분 기법을 사용하여 회전 기동에 따라 파드 헤드부에 부가되는 회전모멘트 값을 계산한다.
5.1 3자유도 모델
일정한 고도와 선회반경을 유지한 상태에서 정상선회(coordinated turn)를 가정한 상태에서 비행체와 파드는 Fig. 16과 같이 3자유도 모델로 단순화 모델링할 수 있다. 이때 각 좌표축은 전투기 본체의 롤운동(φ)과 선회운동(θ), 그리고 파드 헤드의 롤운동(α) 방향을 정의한다. 3자유도 모델에서 전투기와 파드 헤드의 무게중심 좌표는 아래 식 (2)와 같이 표현할 수 있다.
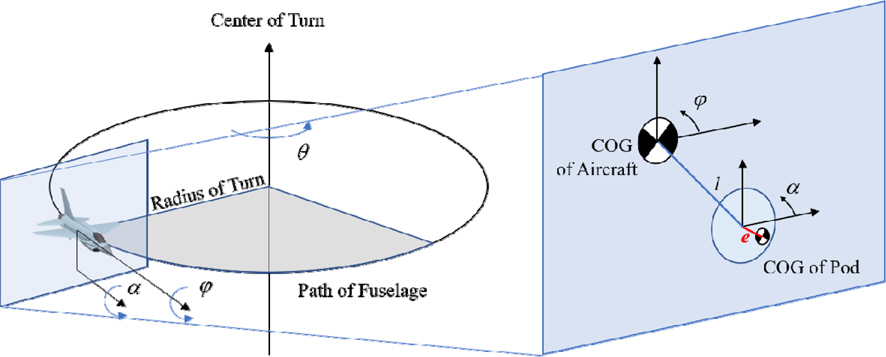
Coordinates for 3-DOF model with an enlarged view of lateral cross-section of aircraft
속도성분은 식 (3)과 같다.
기체의 공기 항력, 파드헤드부의 마찰력 등 에너지 소실요소가 없다고 가정하면, 운동에너지와 위치에너지는 다음 식 (4)와 같이 표현될 수 있다.
라그랑지안 방법에 적용하기 위하여 일반좌표(generalized coordinate) q를 정의하고, 식 (5)의 미분요소는 MATLAB® symbolic toolbox를 이용하여 유도하였다.
기체의 롤 방향 회전각(φ)에 대한 라그랑지안 성분은 식 (6)과 같이 표현된다.
파드 헤드의 롤 방향 회전각(α)에 대한 라그랑지안 성분은 식 (7)과 같이 표현된다.
기체의 선회 방향 회전각(θ)에 대한 라그랑지안 성분은 식 (8)과 같이 표현된다.
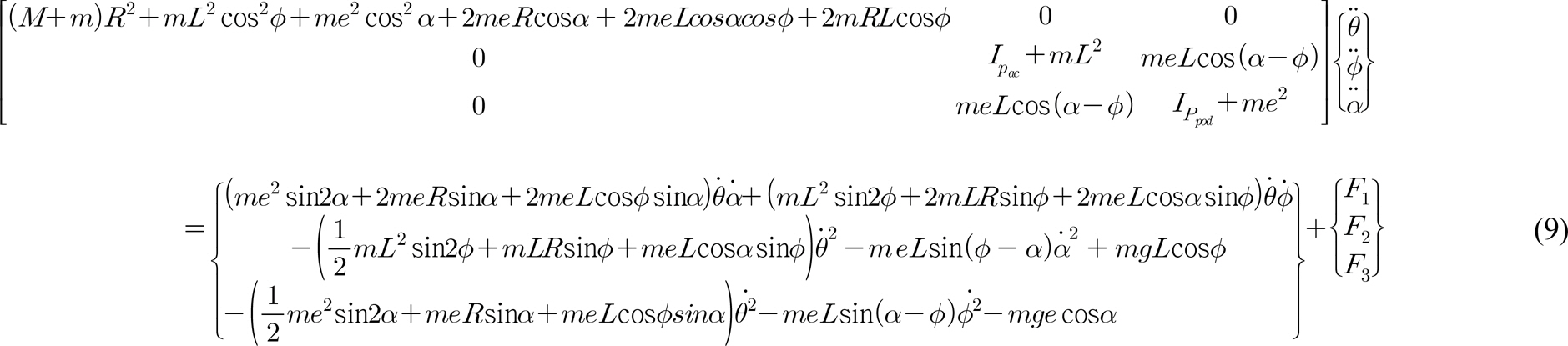
이를 정리하고, 외력을 고려한 기체와 탑재체의 롤기동 및 선회운동을 고려한 방정식은 아래와 같은 행렬식인 식 (9)로 표현할 수 있다.
한편, 기체의 롤기동을 모사하기 위하여 롤 운동의 입력값을, 동적공력하중에서 사용되었던, 식 (1)의 sigmoid 함수를 동일하게 적용한다. 식 (1)의 시간미분을 통하여 회전가속도를 식 (10)과 같이 얻어지며, 기체의 회전관성 모멘트 IPpod를 곱하여, 식 (9) F2에 대입함으로써, 롤 기동 입력을 부가한다.
5.2 관성해석
관성해석은 두 가지 상황을 구분하여 수행한다. 먼저 순수 롤 기동 하에서 기체의 롤 기동이 파드 헤드부에 부가하는 회전 토크를 해석한다. 다음으로 롤 기동과 선회기동이 동시에 수행될 때 발생하는 파드 헤드부의 회전토크를 해석한다. 이때, 동적 공력해석에서 적용된 극한조건(extreme condition) 상태를 가정하여, 롤 기동은 기체가 초기 롤각 0 deg에서 최종 82.16 deg 까지 최대 324 deg/s의 롤각속도를 갖는 조건을 설정하며, 롤 기동의 구현은 앞서 설명한 시그모이드 함수를 사용하였다. 선회기동은 선회반경 1 km 조건에서, 선회각 0 deg에서 진입 후, 105 deg까지 회전가속도 7.33 g 상태를 유지하는 상태를 가정하였다.(Fig. 17 참조[11]) Table 5는 관성해석에 사용된 파라미터값을 나타낸다. 기체와 파드 헤드부의 운동상태 해석은 식 (9)의 연립미분방정식을 상용 수치적분 루틴인 MATLAB® ode15s를 적용하여 수행하였다.

Simulation scenario: the coordinated turn in 7.33 G condition

Parameters of inertial load analysis
Fig. 18(a)는 파드 헤드의 불균형 질량 상태가 0.01 kg·m일 때 순수 롤 기동 하에서 파드 헤드의 롤 운동 각(좌측 y축) 및 각속도(우측 y축)를 나타내며 Fig. 18(b)는 발생되는 토크 값을 나타낸다. 이때 최대 토크값은 0.39 N·m이다. Fig. 19는 파드 헤드의 불균형 질량 상태가 0.05일 때 파드 헤드의 운동상태 및 발생 토크를 나타내고 있으며, 최대 토크값은 1.96 N·m이다.

In case of roll only motion with unbalance 0.01 kg·m (e = 0.14 mm) on pod head: (a) roll angle and rate of pod head, (b) induced torque on pod head
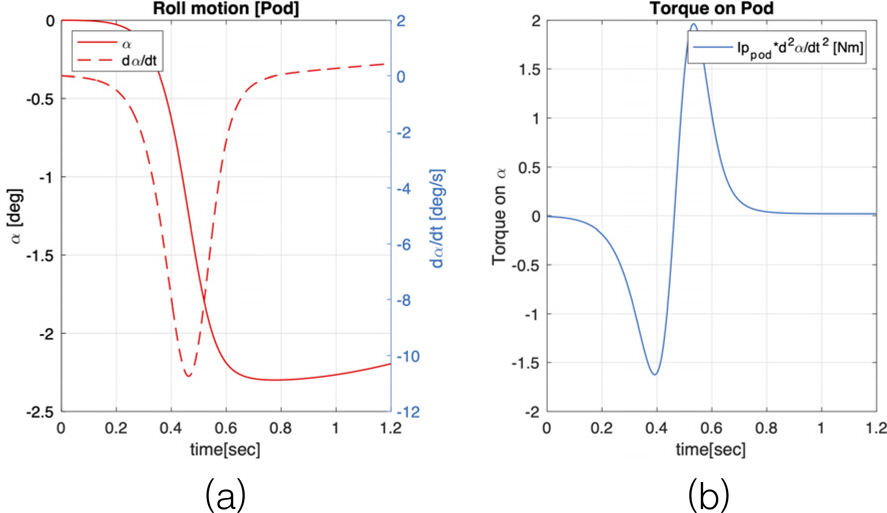
In case of roll only motion with unbalance 0.05 kg·m (e = 0.71 mm) on pod head: (a) roll angle and rate of pod head, (b) induced torque on pod head
Fig. 20은 파드 헤드의 불균형 질량이 0.01 kg 상태에서, 롤기동과 선회기동이 동시에 수행되는 상황에서 기체와 파드헤드의 운동상태를 나타내고 있다. (a)는 기체의 선회각(좌측 y축)과 선회 각속도(우측 y축)를 나타내고 있으며, 선회각이 0 deg에서 105 deg까지 진행되며, 선회 각속도는 15.4 deg/s로 유지되고 있음을 알 수 있다. (b)는 기체의 롤각(좌측 y축) 및 롤 각속도(우측 y축)를 나타낸다. (c)는 탑재체 무게중심에서의 롤각(좌측 y축) 및 롤 각속도(우측 y축)를 나타낸다. (d)는 이에 따른 파드 헤드의 발생 토크를 나타내고 있으며, 최대토크는 약 1.14 N·m로 해석 되었다.

In case of roll and turn motion with unbalance 0.01 kg·m (e = 0.14 mm) on pod head: (a) turn angle and rate of aircraft, (b) roll angle and rate of aircraft, (c) roll angle and rate of pod head, (d) induced torque on pod head
Fig. 21은 파드 헤드의 불균형 질량이 0.05 kg 상태에서 롤기동과 선회기동이 동시에 수행되는 상황에서 기체와 파드헤드의 운동상태를 나타내고 있으며, 최대토크는 약 5.65 N·m로 해석 되었다.
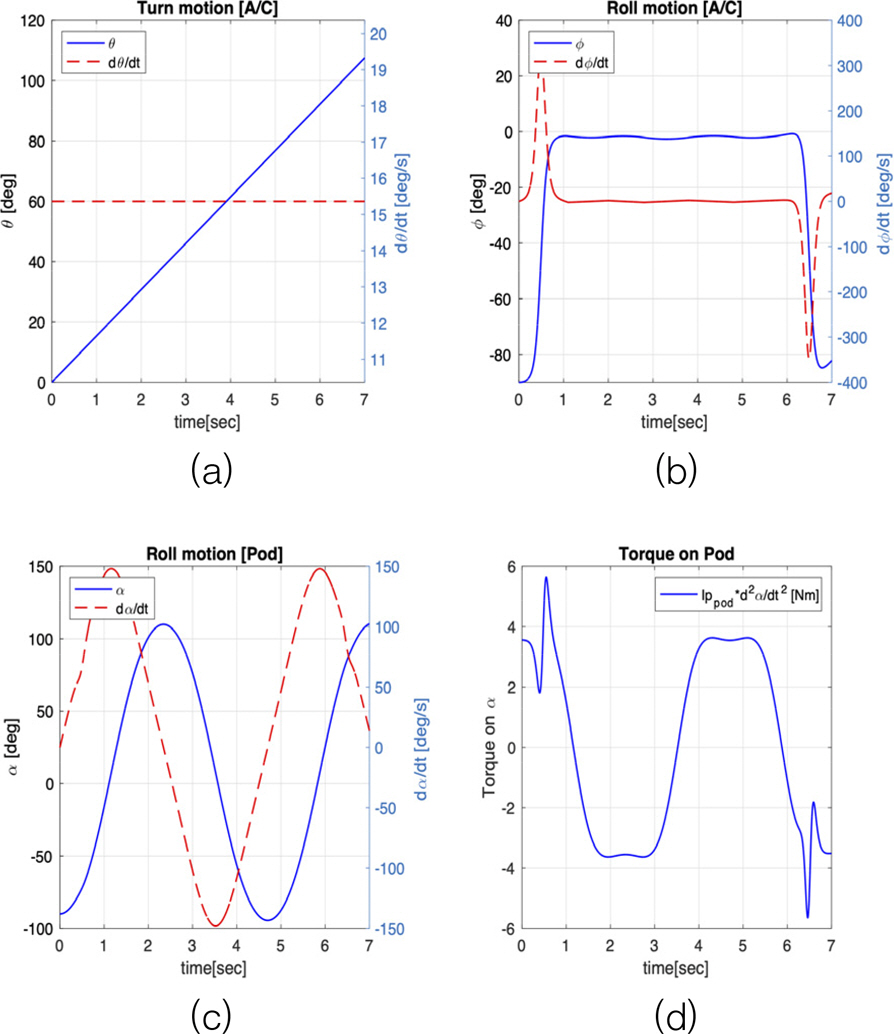
In case of roll and turn motion with unbalance 0.05 kg·m (e = 0.71 mm) on pod head: (a) turn angle and rate of aircraft, (b) roll angle and rate of aircraft, (c) roll angle and rate of pod head, (d) induced torque on pod head
Table 6은 파드헤드의 불균형 질량값을 세분화하여, 순수 롤기동과 롤기동 및 선회기동의 동시수행 조건에서의, 파드 헤드부에 발생되는 토크값을 각각 나타내고 있다. 이를 통하여 관성하중은 공력하중에 비하여 상대적으로 영향이 작지만, 파드 헤드부의 불균형 질량 상태에 따라 주요 고려요인이 될 수 있다는 것을 확인할 수 있다.

Inertial loads on pod head in the roll only and the roll and turn combined motions
6. 결 론
본 연구에서는 전투기 하부 장착 파드의 고기동 회피기동을 고려한 공력하중 및 관성하중을 분석하기 위한 전산해석을 수행하였다. 공력하중 예측을 위하여 유한요소 전투기-파이런-파드 통합모델을 개발하고 정적해석 및 동적해석을 수행하였다.
전산해석은 KAFA전투기의 임무조건을 고려하여 파드의 정적/동적인 상황에 각각 최대선회율조건, 일반조건, 극한조건을 설정한 후에 kw-SST 난류 모델을 통해 파드 구동부 공기역학적 힘과 모멘트를 구하였다.
관성하중은 롤 기동과 선회기동 시 파드 헤드부의 로테이터의 회전모멘트를 예측하기 위하여, 라그랑지안 방법을 적용하여 3 자유도 동역학 방정식을 유도하여 수치적분법 적용하였다. 관성하중은 공력하중에 비하여 상대적으로 매우 낮은 하중을 부가하였으나, 헤드부의 불균형 질량이 커질 경우, 설계요소로 고려해야 함을 확인하였다. 향후 연구는 파드의 실질적인 구조 및 선두부의 기하학적 형상과 전투기와의 간섭효과를 고려한 3차원 공력분포에 대한 분석이 필요하며, 관성해석은 병진운동을, 고려한 추가 자유도 설정, 구동모터 및 베어링 선정, 마찰 모델 등이 고려된 연구가 수행되어야 할 것으로 생각된다.
후기
본 연구는 정부(국방과학연구소)의 재원으로 LIGNex1의 지원을 받아 수행되었습니다.