



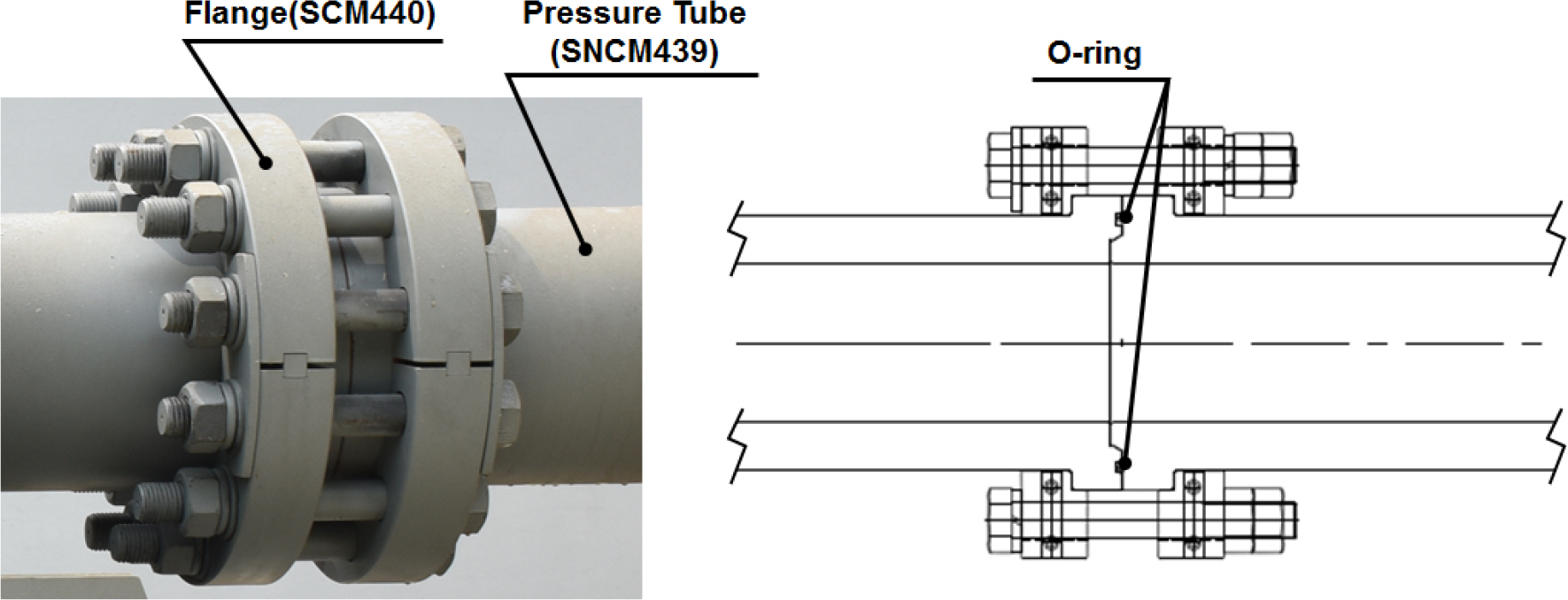
ņä£ ļĪĀ
ĒāäņĢĮņØś ļ░£ņĀä ņČöņäĖņŚÉ ļö░ļØ╝ ĻĖ░ņĪ┤ ņ×¼ļלņŗØ ĒāäņĢĮņŚÉņä£ ņ¦Ć ļŖźĒāä ĒśĢĒā£ņØś ĒāäņĢĮņØ┤ ļ░£ņĀäĒĢśĻĖ░ ņŗ£ņ×æĒĢśņśĆņ£╝ļ®░, ņØ┤ņŚÉ ļö░ļØ╝ ĒāäņĢĮ ļé┤ļČĆņŚÉ ĻĄ¼ļÅÖņןņ╣ś, ĒĢŁļ▓ĢļČĆ, ļ░Å ņ£ĀļÅäļČĆņÖĆ Ļ░ÖņØĆ ņĀäņ×Éņןļ╣äļōżņØ┤ ņĀüņÜ®ļÉśĻĖ░ ņŗ£ņ×æĒĢśņśĆļŗż. ĒĢśņ¦Ćļ¦ī, ĒāäņĢĮņØś Ļ▓ĮņÜ░ ņ£ĀļÅäĒāäĻ│╝ ļŗ¼ļ”¼ ļ░£ņé¼ņŗ£ ņĄ£ļīĆ 15,000 G ņØ┤ņāüņØś Ļ│ĀņČ®Ļ▓®ņØ┤ ļ░£ņāØĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ņ¦ĆļŖźĒāä ļé┤ļČĆņŚÉ ņןņ░®ļÉśļŖö ļČĆĒÆłņØś ļé┤Ļ│ĀņČ®Ļ▓®ņä▒ņØ┤ ņÜöĻĄ¼ļÉśņŚłļŗż[1ŌĆō4]. ņāüĻĖ░ ļČĆĒÆłņØś ļé┤Ļ│ĀņČ®Ļ▓®ņä▒ ĒÅēĻ░Ćļź╝ ņ£äĒĢ┤ ĒāäņĢĮ ļé┤ļČĆņŚÉ ņŗ£ĒŚśĒÆłņØä ņןņ░®ĒĢśĻ│Ā ĒśĖņłśļéś ņŚ░ņĢłņłś ņ¬Įņ£╝ļĪ£ ĒāäņØä ļ░£ņé¼ĒĢśĻ▒░ļéś ņłśņ¦üņ£╝ļĪ£ ĒżĒāäņØä ļ░£ņé¼ĒĢśņŚ¼ ļČĆļō£ļ¤¼ņÜ┤ ņ×ģņ×ÉĻ░Ć Ļ╣öļ”░ ĒÜīņłśņśüņŚŁņ£╝ļĪ£ ĒÜīņłśĒĢśļŖö ļ░®ļ▓ĢņØ┤ ņ׳ļŗż. ņŗ£ĒŚśĒāäņØś ĒÜīņłśļź╝ ņ£äĒĢ┤ Chung ņØĆ ņŚ¼ļ¤¼ņןņØś ņ¢ćņØĆ ĻĖłņåŹ ĒīÉņØä Ļ┤ĆĒåĄĒĢśļÅäļĪØ ĻĄ¼ņä▒ĒĢ£ ĒÜīņłśņןļ╣äļÅä Ļ░£ļ░£ĒĢśņśĆļŗż[5]. ĒĢśņ¦Ćļ¦ī, ņāüĻĖ░ņÖĆ Ļ░ÖņØĆ ļ░®ļ▓Ģņ£╝ļĪ£ļŖö ņŗ£ĒŚś ļ░Å ĒÜīņłśņŗ£ ļ░£ņāØĒĢśļŖö Ļ│╝ļÅäĒĢ£ ņŗ£Ļ░äĻ│╝ ļ╣äņÜ®, ņŗ£ĒŚśņ▓┤ņŚÉ Ļ░ĆĒĢ┤ņ¦ĆļŖö ņøÉņ╣ś ņĢŖļŖö ĒĢśņżæ ļō▒ņØś ļ¼ĖņĀ£ņĀÉņ£╝ļĪ£ ņØĖĒĢ┤ U.S. Army, ARDECņŚÉņä£ļŖö ĒāäļÅäņĢĢņČĢ Ļ░ÉņåŹņןļ╣äļź╝ ņØ┤ņÜ®ĒĢ£ ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äļź╝ Ļ░£ļ░£ĒĢśņśĆļŗż[6,7]. ĒāäļÅäņĢĢņČĢņØä ņØ┤ņÜ®ĒĢ£ ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äļŖö ņ┤łņØīņåŹ ņŗ£ĒŚśĒāäņØä Ļ░ĆņŖżņÖĆ ļ¼╝ņØ┤ ņČ®ņ¦äļÉ£ ņĢĢļĀźĻ┤ĆņŚÉ ņ¦äņ×ģņŗ£ņ╝£ ņČ®Ļ▓®Ēīīļź╝ ļ░£ņāØņŗ£ĒéżĻ│Ā ņØ┤ļĪ£ ņØĖĒĢ£ ņĢĢļĀźņ”ØĻ░Ćļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņŗ£ĒŚśĒāäņØä Ļ░ÉņåŹņŗ£ĒéżļŖö ņןļ╣äņØ┤ļŗż.
SongĻ│╝ KimņØĆ ĒāäļÅäņĢĢņČĢņØä ņØ┤ņÜ®ĒĢ£ ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äņŚÉņä£ Ļ░ĆņŖż ļ░Å ļ¼╝ ņČ®ņ¦äļ¤ēņØś ļ│ĆĒÖöņŚÉ ļö░ļźĖ ņŗ£ĒŚśĒāäņØś Ļ░ÉņåŹĒŖ╣ņä▒ņØä ĒÖĢņØĖĒĢśĻĖ░ ņ£äĒĢ┤ HLL Riemann ņåöļ▓äņÖĆ 1ņ░©ņøÉ ņśżņØ╝ļ¤¼ ļ░®ņĀĢņŗØņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņØ┤ļĪĀņĀü ĒĢ┤ļź╝ Ļ░£ļ░£ĒĢśņśĆļŗż[8].
ņØ╝ļ░śņĀüņ£╝ļĪ£ ļ░£ņé¼ņןļ╣äļĪ£ļČĆĒä░ ļ░£ņé¼ļÉ£ ņŗ£ĒŚśĒāäņØś Ļ░ÉņåŹĒŖ╣ņä▒ņØä ĒÖĢņØĖĒĢśĻĖ░ ņ£äĒĢ┤ Ļ░ĆņåŹļÅä ņä╝ņä£Ļ░Ć ņןņ░®ļÉ£ ņØ┤ļĀźņןņ╣śļź╝ ņé¼ņÜ®ĒĢśļéś[9ŌĆō13], ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äņŚÉņä£ ņØ┤ļĀźņןņ╣śļź╝ ņØ┤ņÜ®ĒĢĀ Ļ▓ĮņÜ░ ņØ┤ļĀźņןņ╣ś ĒÜīņłśņŗ£ ņåÉņāü ņ£äĒŚśļ┐É ņĢäļŗłļØ╝ ņŗ£Ļ░ä ļ░Å ļ╣äņÜ® ņĖĪļ®┤ņŚÉņä£ļÅä ļŗ©ņĀÉņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż.
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äļé┤ ņŗ£ĒŚśĒāäņØś ņóģļ¦ÉņåŹļÅäņÖĆ Ļ░ÉņåŹļÅäņŚÉ ņśüĒ¢źņØä ļ»Ėņ╣śļŖö Ļ░ĆņŖż ļ░Å ļ¼╝ ņČ®ņ¦äļ¤ē ņĪ░Ļ▒┤ņØä Ļ│äņé░ĒĢśĻĖ░ ņ£äĒĢ┤ SongĻ│╝ KimņŚÉ ņØśĒĢ┤ Ļ░£ļ░£ļÉ£ ņØ┤ļĪĀņĀü ĒĢ┤Ļ░Ć ņ┤łņØīņåŹņ£╝ļĪ£ ļ░£ņé¼ļÉ£ 155 mm ņŗ£ĒŚśĒāäņØś ņŗżĒŚś Ļ▓░Ļ│╝ņÖĆ ņ£Āņé¼ĒĢ£ņ¦Ć ļ╣äĻĄÉĒĢśņśĆļŗż. ņ”ē, HLL Riemann ņåöļ▓ä ļ░Å 1ņ░©ņøÉ ņśżņØ╝ļ¤¼ ļ░®ņĀĢņŗØņØä ņØ┤ņÜ®ĒĢ£ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ņÖĆ ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äņŚÉņä£ CW(Continuous Wave) ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżņŚÉ ņØśĒĢ┤ ņŗżņŗ£Ļ░ä Ļ│äņĖĪļÉ£ ņŗ£ĒŚśĒāäņØś ņåŹļÅäļź╝ ļ╣äĻĄÉĒĢśņŚ¼ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝Ļ░Ć ĒāĆļŗ╣ĒĢ£ Ļ▓āņØä ĒÖĢņØĖĒĢśņśĆļŗż. ļö░ļØ╝ņä£, ņłśņ╣śĒĢ┤ņäØņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äņØś Ļ░ĆņŖż ļ░Å ļ¼╝ ņČ®ņ¦äļ¤ē ņĪ░Ļ▒┤ņØä Ļ│äņé░ĒĢĀ ņłś ņ׳ņØä Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ĒĢśņśĆļŗż.
ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣ä
2.1 ņŗ£ĒŚśņןļ╣ä Ļ░£ņÜö
ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äļŖö Ļ░ĆņåŹņןļ╣äņŚÉņä£ ļ░£ņé¼ļÉ£ ņŗ£ĒŚśĒāäņØä ņĢłņĀäĒĢśĻ▓ī ĒÜīņłśĒĢśļŖö ņןļ╣äņØ┤ļ®░ Fig. 1Ļ│╝ Ļ░ÖņØ┤ ņ┤Ø ĻĖĖņØ┤ 179 mņŚÉ 6Ļ░£ņØś ĻĄ¼Ļ░äņ£╝ļĪ£ ĻĄ¼ļČäļÉ£ļŗż. ĒÜīņłśņןļ╣äļé┤ņŚÉļŖö ņĢĢļĀźņä╝ņä£ 10Ļ░£ņÖĆ CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗż 1Ļ░£Ļ░Ć ņ׳ņ¢┤ ņŗ£ĒŚśĒāäņØ┤ ņĢĢļĀźĻ┤Ć ļé┤ļČĆļź╝ ņØ┤ļÅÖĒĢśļŖö ļÅÖņĢł ņĢĢļĀźņØ┤ļĀźĻ│╝ ņåŹļÅäņØ┤ļĀźņØä ņŗżņŗ£Ļ░äņ£╝ļĪ£ ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż.
ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äļŖö ņŗ£ĒŚśĒāäņØ┤ ņ┤łņØīņåŹņ£╝ļĪ£ ņØ┤ļÅÖĒĢĀ ļĢī ņĀäļ░®ņŚÉ ņČ®Ļ▓®ĒīīĻ░Ć ļ░£ņāØĒĢśņŚ¼ ņŗ£ĒŚśĒāäļ│┤ļŗż ļ╣ĀļźĖ ņåŹļÅäļĪ£ ņĀäĒīīļÉśĻ│Ā ņČ®Ļ▓®Ēīī Ēøäļ░®, ņ”ē ņŗ£ĒŚśĒāä ņĀäļ░®ņØś ņĢĢļĀźņØ┤ ņāüņŖ╣ĒĢ©ņŚÉ ļö░ļØ╝ Ļ░ÉņåŹļÅäĻ░Ć ņ”ØĻ░ĆĒĢ£ļŗż.

2.2 ņŗ£ĒŚśņןļ╣ä ĻĄ¼ņä▒
Ļ░ĆņåŹņןļ╣äļĪ£ 155 mm ņŗ£ĒŚśĒāä ļ░£ņé¼Ļ░Ć Ļ░ĆļŖźĒĢ£ K9 ņ×ÉņŻ╝Ēż ļ¼┤ņןņØä ņé¼ņÜ®ĒĢśņśĆļŗż. K9 ĒżņŗĀ ļüØļŗ©ņŚÉļŖö ļ░┤ļō£ņ╗żĒä░Ļ░Ć ņןņ░®ļÉśņ¢┤ ņŗ£ĒŚśĒāä ļ░£ņé¼ņŗ£ ļÅÖļ░┤ļō£ļź╝ ņĀ£Ļ▒░ĒĢĀ ņłś ņ׳ļÅäļĪØ ĻĄ¼ņä▒ĒĢśņśĆļŗż. Ļ░ĆņåŹņןļ╣äņÖĆ ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣ä ņé¼ņØ┤ņŚÉļŖö ņŗ£ĒŚśĒāäņØ┤ ļ░£ņé¼ļÉĀ ļĢī ļ░£ņāØĒĢśļŖö ņČöņ¦äĻ░ĆņŖżņÖĆ ļ»ĖņŚ░ņåī ņČöņ¦äņĀ£Ļ░Ć ņĢĢļĀźĻ┤Ć ļé┤ļČĆļĪ£ ņ¦äņ×ģĒĢśņ¦Ć ņĢŖļÅäļĪØ ņØ┤Ļ▓®ņŗ£ņ╝░ļŗż.
ĒÜīņłśņןļ╣äļŖö 1 m, 3 m, 6 mņØś ņĢĢļĀźĻ┤ĆņØä ņĪ░ĒĢ®ĒĢśņŚ¼ 6Ļ░£ ĻĄ¼Ļ░äņ£╝ļĪ£ ĻĄ¼ņä▒ĒĢśņśĆļŗż. ņĢĢļĀźĻ┤Ć ņØ┤ņØīļ¦ż ņé¼ņØ┤ņŚÉļŖö Fig. 2ņÖĆ Ļ░ÖņØ┤ ņśżļ¦üņØ┤ ņéĮņ×ģļÉśņ¢┤ ņČ®ņ¦äļÉ£ Ļ░ĆņŖżļéś ņČ®Ļ▓®Ēīī ņĢĢļĀźņØ┤ ņĢĢļĀźĻ┤Ć ņÖĖļČĆļĪ£ ļłäņäżļÉśņ¦Ć ņĢŖļÅäļĪØ ĻĄ¼ņä▒ĒĢśņśĆļŗż.
ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äļŖö Table 1Ļ│╝ Ļ░ÖņØ┤ ĻĖ░ļŖźļ│äļĪ£ 6Ļ░£ ĻĄ¼Ļ░äņ£╝ļĪ£ ĻĄ¼ļČäĒĢĀ ņłś ņ׳ļŗż.
Table┬Ā1.
Length of SRS(Soft Recovery System) section
| Section | Length (m) |
|---|---|
| GVT(Gas Vent Tube) | 3 |
| PET(Projectile Entrance Tube) | 30 |
| HPT(High Pressurized Tube) | 103 |
| WFT(Water Filled Tube) | 31 |
| WST(Water Spout Tube) | 6 |
| WB(Wedge Brake) | 6 |
Ļ░ĆņŖż ļ░░ĻĖ░Ļ┤Ć(GVT)ņØĆ 3 m ĻĖĖņØ┤ņØś ņĢĢļĀźĻ┤Ćņ£╝ļĪ£ ņŖ¼ļĪ»ņØ┤ ņøÉņŻ╝ļ░®Ē¢źņ£╝ļĪ£ ļ░░ņ╣śļÉśņ¢┤ ņןņĢĮņØś ņČöņ¦äĻ░ĆņŖżĻ░Ć ļ░░ĻĖ░ļÉĀ ņłś ņ׳ļÅäļĪØ ņäżĻ│äĒĢśņśĆļŗż. Ļ░ĆņŖż ļ░░ĻĖ░Ļ┤Ć ņ¦äņ×ģĻĄ¼ļŖö ļ░£ņé¼ņ▓┤ņØś ņČ®Ļ▓®ņŚÉ ļīĆņØæĒĢĀ ņłś ņ׳ļÅäļĪØ Ļ░ĢĻ▒┤ĒĢ£ ņ¦Ćņ¦ĆļīĆļĪ£ ĻĄ¼ņä▒ļÉśņŚłņ£╝ļ®░ ņŗ£ĒŚśĒāäņØ┤ ņĢĢļĀźĻ┤ĆņŚÉ ņĢłņĀäĒĢśĻ▓ī ņ¦äņ×ģĒĢĀ ņłś ņ׳ļÅäļĪØ ĒĢśļŖö ņŚŁĒĢĀņØä ĒĢ£ļŗż.
ņāüņĢĢĻ┤Ć(PET)ņØĆ ņŗ£ĒŚśĒāä ņ¦äņ×ģņŚÉ ļö░ļźĖ ņČ®Ļ▓®Ēīī ļ░£ņāØĻ│╝ Ļ│ĄĻĖ░ ņĢĢņČĢņØä ņ£äĒĢ£ 6 m ņĢĢļĀźĻ┤Ć 5Ļ░£ļĪ£ ĻĄ¼ņä▒ļÉ£ļŗż. ņāüņĢĢĻ┤ĆĻ│╝ Ļ│ĀņĢĢĻ┤Ć(HPT) ņé¼ņØ┤ņŚÉļŖö ļģĖņ╣ś(notch)Ļ░Ć ņ׳ļŖö Ļ▓®ļ¦ē(AL1050, 2T)ņØ┤ ņéĮņ×ģļÉśļ®░ Ļ▓®ļ¦ēņØĆ ņČ®ņ¦äļÉ£ Ļ░ĆņŖżĻ░Ć ļłäņäżļÉśņ¦Ć ņĢŖļÅäļĪØ ņĢĢļĀźĻ┤ĆņŚÉ ņØ┤ņżæņ£╝ļĪ£ ņśżļ¦üņØ┤ ņéĮņ×ģļÉ£ļŗż. ņŗ£ĒŚśĒāäņØ┤ ņāüņĢĢĻ┤ĆņŚÉ ņ¦äņ×ģĒĢśļ®┤ Ļ▓®ļ¦ēņØĆ ĒīīņŚ┤ņĢĢ(burst pressure)ņØä ņ┤łĻ│╝ĒĢśļŖö ņČ®Ļ▓®ĒīīĻ░Ć ļÅäļŗ¼ĒĢśĻĖ░ ņĀäĻ╣īņ¦Ć ņČ®Ļ▓®Ēīīļź╝ ļ░śņé¼ņŗ£ņ╝£ ņŗ£ĒŚśĒāäņØä Ļ░ÉņåŹņŗ£Ēé©ļŗż. ņŗ£ĒŚśĒāäĻ│╝ Ļ▓®ļ¦ē ņé¼ņØ┤ļź╝ ņÖĢļ│ĄĒĢśļŖö ņČ®Ļ▓®ĒīīņØś Ēü¼ĻĖ░Ļ░Ć ĒīīņŚ┤ņĢĢņØä ņ┤łĻ│╝ĒĢśļ®┤ Ļ▓®ļ¦ēņØĆ ĒīīņŚ┤ĒĢ£ļŗż.
Ļ│ĀņĢĢĻ┤Ć(HPT)ņØĆ Ļ░ĆņŖżĻ░Ć ņČ®ņ¦äļÉśļŖö ĻĄ¼Ļ░äņ£╝ļĪ£ ņĀäņ▓┤ ņĢĢļĀźĻ┤Ć ņżæ ĻĖĖņØ┤Ļ░Ć Ļ░Ćņן ĻĖ┤ ĻĄ¼Ļ░ä(103 m)ņØ┤ļŗż. ņĀäļ░®ņŚÉļŖö Ļ▓®ļ¦ēĻ│╝ Ēøäļ░®ņŚÉļŖö ņĀäļŗ©ļ¦üņØ┤ ņ׳ļŖö Ēö╝ņŖżĒåżņØ┤ ļ░░ņ╣śļÉśņ¢┤ Ļ░ĆņŖż ļłäņäżņØä ļ░®ņ¦ĆĒĢśļ®░ ņČ®Ļ▓®Ēīīļź╝ ļ░śņé¼ņŗ£ņ╝£ ņŗ£ĒŚśĒāäņØä Ļ░ÉņåŹņŗ£ĒéżļŖö ņŚŁĒĢĀņØä ĒĢ£ļŗż. Fig. 3ņŚÉ ņĢĢļĀźĻ┤Ć ļé┤ļČĆņŚÉņä£ ņ¦äĒ¢ēĒĢśļŖö ņŗ£ĒŚśĒāäĻ│╝ Ēö╝ņŖżĒåż ņé¼ņØ┤ņŚÉņä£ ļ░£ņāØĒĢśļŖö ņČ®Ļ▓®ĒīīņØś ņ¦äĒ¢ē Ļ░£ļģÉļÅäļź╝ ļéśĒāĆļé┤ņŚłļŗż.

ļ¼╝ ņČ®ņ¦äļČĆ(WFT)ļŖö 31 mņØś ņĢĢļĀźĻ┤Ćņ£╝ļĪ£ ĻĄ¼ņä▒ļÉśļ®░ ņŗ£ĒŚś ņĪ░Ļ▒┤ņŚÉ ļö░ļØ╝ ņĢĮ 10 kg ~ 30 kgņØś ļ¼╝ņØ┤ ņČ®ņ¦äļÉśļ®░ ļīÉņØä ņäżņ╣śĒĢśņŚ¼ Ēö╝ņŖżĒåżņØ┤ ņ¦äĒ¢ēĒĢśĻĖ░ ņĀäĻ╣īņ¦Ć ļ¼╝ņØä Ļ░Ćļæś ņłś ņ׳ļÅäļĪØ ĻĄ¼ņä▒ĒĢśņśĆļŗż. Ēö╝ņŖżĒåżņØ┤ ņČ®Ļ▓®ĒīīņŚÉ ņØśĒĢ┤ ņĀäļŗ©ļÉśņ¢┤ ņØ┤ļÅÖņØä ņŗ£ņ×æĒĢśļ®┤ ņČ®ņ¦äļÉ£ ļ¼╝ņØś ņ¦łļ¤ēņØ┤ Ēö╝ņŖżĒåżņŚÉ ļŹöĒĢ┤ņ¦ĆĻ│Ā ļ¼╝ĻĖ░ļæźņØ┤ ĒśĢņä▒ļÉśļ®┤ņä£ ļ¼╝Ļ│╝ ņĢĢļĀźĻ┤Ć ļé┤ļČĆ Ēæ£ļ®┤ņé¼ņØ┤ņŚÉ ļ¦łņ░░ļĀźņØ┤ ņ”ØĻ░ĆĒĢ£ļŗż. Ēö╝ņŖżĒåżņØĆ ļ¦łņ░░ļĀźņŚÉ ņØśĒĢ┤ Ļ░ÉņåŹĒĢśļ®░ ņČ®Ļ▓®ĒīīļŖö ņŗ£ĒŚśĒāäĻ│╝ Ēö╝ņŖżĒåż ņé¼ņØ┤ļź╝ ņÖĢļ│ĄĒĢśļ®┤ņä£ ņŗ£ĒŚśĒāäņØä Ļ░ÉņåŹņŗ£Ēé©ļŗż.
ĒåĀņČ£ļČĆ(WST)ļŖö 6 m ņĢĢļĀźĻ┤Ćņ£╝ļĪ£ ņøÉņŻ╝ļ░®Ē¢ź ļ░Å ņČĢļ░®Ē¢źņŚÉ ņŖ¼ļĪ»ņØ┤ ņ׳ņ¢┤ ņČ®ņ¦äļÉ£ ļ¼╝ņØ┤ Ēö╝ņŖżĒåżņŚÉ ņØśĒĢ┤ ĒåĀņČ£ļÉśļŖö ņśüņŚŁņØ┤ļŗż.
ņÉÉĻĖ░ ļĖīļĀłņØ┤Ēü¼ļČĆ(WB)ļŖö 3ļŗ©ņØś ļ¦łņ░░ļ░öļĪ£ ĻĄ¼ņä▒ļÉśļ®░ ļ¦łņ░░ļĀźņŚÉ ņØśĒĢ┤ ņŗ£ĒŚśĒāäņØä ņĄ£ņóģ Ļ░ÉņåŹņŗ£Ēé©ļŗż. ņÉÉĻĖ░ ļĖīļĀłņØ┤Ēü¼ļČĆņŚÉņä£ ņŗ£ĒŚśĒāäņØ┤ ļ®łņČöņ¦Ć ļ¬╗ĒĢĀ Ļ▓ĮņÜ░ ļ¬©ļל ĒÜīņłśļČĆļĪ£ ņ¦äņ×ģĒĢ£ļŗż.
Fig. 4ņŚÉ ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣ä ņĀäĻ▓ĮņØä ļéśĒāĆļé┤ņŚłļŗż.

2.3 CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗż ĻĄ¼ņä▒
CW(Continuous Wave) ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżļŖö Fig. 5ņÖĆ Ļ░ÖņØ┤ ĻĖēņĀäļČĆ, ņåĪņłśņŗĀļČĆ, ņŗĀĒśĖņ▓śļ”¼ļČĆļĪ£ ĻĄ¼ņä▒ļÉśļ®░ Ļ░üĻ░üņØĆ ņ╝ĆņØ┤ļĖöļĪ£ ņŚ░Ļ▓░ļÉśņ¢┤ ņ׳ņ¢┤ ņŗżņŗ£Ļ░äņ£╝ļĪ£ ņŗ£ĒŚśĒāäņØś ņåŹļÅä ļ░Å Ļ▒░ļ”¼ Ļ▓░Ļ│╝ļź╝ ĒÜŹļōØĒĢĀ ņłś ņ׳ļŗż. CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżļŖö ņŗ£ĒŚśĒāäņŚÉ ņŚ░ņåŹņĀüņ£╝ļĪ£ ņĀäĒīīļź╝ ņåĪņŗĀĒĢśņŚ¼ ņŻ╝Ēīīņłś ļ│ĆņØ┤ļź╝ Ļ▓ĆņČ£ĒĢ©ņ£╝ļĪ£ņŹ© ņåŹļÅäļź╝ Ļ│äņĖĪĒĢĀ ņłś ņ׳ļÅäļĪØ ĻĄ¼ņä▒ĒĢśņśĆļŗż[14,16].
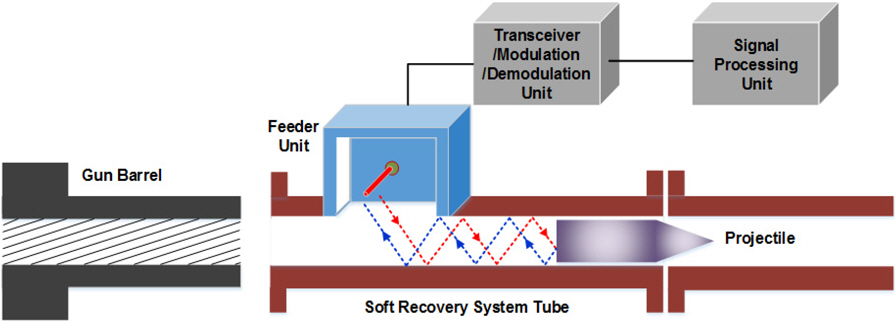
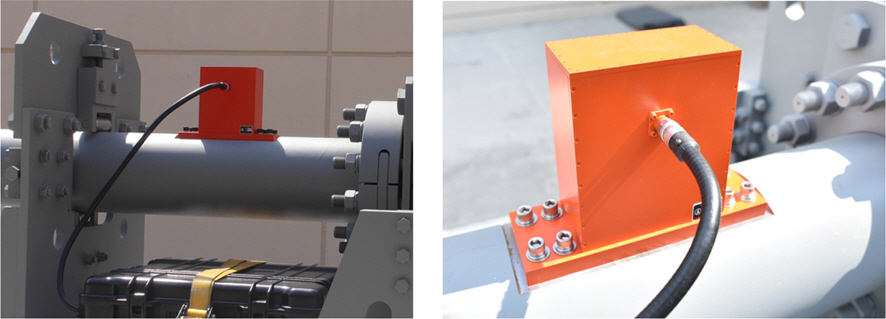
ĻĖēņĀäļČĆ(feeder unit)ļŖö ņĢĢļĀźĻ┤Ć ļé┤ļČĆļĪ£ ņĀäĒīīļź╝ ņåĪņłśņŗĀĒĢśļŖö ņŚŁĒĢĀņØä ņłśĒ¢ēĒĢśļ®░ ņāüņĢĢĻ┤Ć ņ×ģĻĄ¼ ņāüļČĆņŚÉ Fig. 6Ļ│╝ Ļ░ÖņØ┤ ņäżņ╣śĒĢśņśĆļŗż.
ņåĪņłśņŗĀļČĆ(transceiver unit)ņØĆ ņŚ░ņåŹĒīī(Continuous Wave)ļź╝ ņāØņä▒ĒĢśņŚ¼ ĻĖēņĀäļČĆļź╝ ĒåĄĒĢ┤ ņåĪņŗĀĒĢśĻ│Ā ņĢĢļĀźĻ┤Ćļé┤ ņŗ£ĒŚśĒāä Ēøäļ░®ņŚÉ ļ░śņé¼ļÉśņ¢┤ ĻĖēņĀäļČĆļź╝ ĒåĄĒĢ┤ ņłśņŗĀĒĢ£ļŗż.
ņŗĀĒśĖņ▓śļ”¼ļČĆ(Signal processing unit)ļŖö ņåĪņłśņŗĀļČĆĻ░Ć ņŚ░ņåŹĒīīļź╝ ņāØņä▒ĒĢśļÅäļĪØ ņ¦üņĀæļööņ¦ĆĒäĖĒĢ®ņä▒ĻĖ░ļź╝ ņĀ£ņ¢┤ĒĢśļ®░ ņĀäĒīī ņŗĀĒśĖļź╝ ņłśņŗĀĒĢśņŚ¼ ļÅäĒöīļ¤¼ ņŻ╝Ēīīņłśļź╝ ņČöņČ£ĒĢ£ļŗż. ņØĖĒä░ĒÄśņØ┤ņŖżļČĆļŖö ņČöņČ£ļÉ£ ļÅäĒöīļ¤¼ ņŻ╝Ēīīņłśļź╝ ņŚ░ņé░ĒĢśņŚ¼ ņŗ£ĒŚśĒāäņØś ņåŹļÅä ļ░Å Ļ▒░ļ”¼ļź╝ ļÅäņŗ£ĒĢ£ļŗż.
ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äļŖö ņŗżļ”░ļŹö ĒśĢĒā£ņØś ņĢĢļĀźĻ┤ĆņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņŗ£ĒŚśĒāäņØä Ļ░ÉņåŹņŗ£ĒéżĻĖ░ ļĢīļ¼ĖņŚÉ ņĢĢļĀźĻ┤ĆņØä ņøÉĒśĢ ļÅäĒīīĻ┤Ć(Circular waveguide)ņ£╝ļĪ£ ļ│╝ ņłś ņ׳ļŗż. CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżņØś ĻĖēņĀäļČĆļŖö ņĢĢļĀźĻ┤Ć ļé┤ļČĆļĪ£ ņĀäĒīīļź╝ ņåĪņłśņŗĀĒĢśļ®░, ņĢĢļĀźĻ┤Ć ļé┤ļČĆņŚÉņä£ ņŻ╝ĒīīņłśņŚÉ ļö░ļØ╝ ņŚ¼ļ¤¼ Ļ░Ćņ¦Ć Ļ│Āņ░©ļ¬©ļō£(higher modes)Ļ░Ć ņĀäĒīīļÉĀ Ļ▓ĮņÜ░ Ļ░üĻ░üņØś ļ¬©ļō£ņŚÉ ļö░ļØ╝ ņĀäĒīīņåŹļÅäĻ░Ć ļŗżļź┤ļ»ĆļĪ£ ņŗ£ĒŚśĒāäņØś ņåŹļÅä ļ░Å Ļ▒░ļ”¼ļź╝ ņĀĢĒÖĢĒĢśĻ▓ī Ļ│äņĖĪĒĢśĻĖ░ ņ¢┤ļĀĄļŗż. ļö░ļØ╝ņä£, dominant mode(TE11)ļ¦īņØ┤ ņŚ¼ĻĖ░ļÉśļÅäļĪØ ĻĖēņĀäļČĆļŖö 1.4 GHz ļīĆņŚŁņØä ņé¼ņÜ®ĒĢśņśĆļŗż. Dominant modeļ×Ć cutoff ņŻ╝ĒīīņłśĻ░Ć Ļ░Ćņן ļé«ņØĆ modeļź╝ ļ£╗ĒĢśļ®░ ņĢĢļĀźĻ┤Ć ļé┤ļČĆņŚÉņä£ cutoff ņŻ╝Ēīīņłśļ│┤ļŗż ņ×æņØĆ ņŻ╝ĒīīņłśļŖö ņĀäĒīīļÉśņ¦Ć ņĢŖĻ▓ī ļÉ£ļŗż.
ļÅäĒöīļ¤¼ ļ░®ņŗØņØś ņĖĪņĀĢ ņøÉļ”¼ļŖö ņåŹļÅä Ļ│äņĖĪ ņåĪņłśņŗĀ ņŻ╝Ēīīņłś ļ│ĆņØ┤ļź╝ Ļ▓ĆņČ£ĒĢśļŖö Ļ▓āņØ┤ļŗż. RF Ļ│äņĖĪņןļ╣äņØś ņåĪņŗĀņŻ╝ĒīīņłśļŖö 1.4 GHzļĪ£ņä£ Ļ┤Ćļé┤ Ēīīņן(╬╗g)ņØĆ ņŗØ (1)Ļ│╝ Ļ░Öļŗż. Vp ļŖö TE11 ļ¬©ļō£ņŚÉņä£ņØś Ļ┤Ćļé┤ ņ£äņāü ņåŹļÅä(5.06E8 m/s)ņØ┤ļ®░, Freq.ļŖö ņé¼ņÜ® ņŻ╝Ēīīņłś(1.4 GHz), cļŖö Ļ┤æņåŹņØä ņØśļ»ĖĒĢ£ļŗż.
ņāśĒöīļ¦ü ņŻ╝ĒīīņłśļŖö 100 kHzļĪ£ ļÅäĒöīļ¤¼ ņŻ╝Ēīīņłś(Fd)ļź╝ Ļ▓ĆņČ£ĒĢśļ®░ ņĖĪņĀĢ ļŹ░ņØ┤Ēä░ļŖö AD ņāśĒöīļ¦ü 12 bitļĪ£ ļ│ĆĒÖśļÉ£ļŗż. ļÅäĒöīļ¤¼ ņŻ╝Ēīīņłś(Fd)ņÖĆ ļīĆņāüņ▓┤ ņåŹļÅä(Vr)ņÖĆņØś Ļ┤ĆĻ│äņŗØņØĆ ņŗØ (3)Ļ│╝ Ļ░Öļŗż. ļö░ļØ╝ņä£, ņĖĪņĀĢļÉ£ ņŻ╝Ēīīņłś ņä▒ļČäņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņŗ£ĒŚśĒāäņØś ņåŹļÅäļź╝ ņŗżņŗ£Ļ░äņ£╝ļĪ£ Ļ│äņé░ĒĢĀ ņłś ņ׳ļŗż.
CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżņØś ĻĖ░ļĪØņŗ£ņĀÉņØĆ ļÅäĒöīļ¤¼ ņŗĀĒśĖĻ░Ć Ļ░Éņ¦ĆļÉśļŖö ņŗ£ņĀÉņØĖ ņŗ£ĒŚśĒāäņØ┤ ņāüņĢĢĻ┤Ć(PET)ņŚÉ ņ¦äņ×ģĒĢĀ ļĢīņØ┤ļŗż.
2.4 ņĢĢļĀźņä╝ņä£ ĻĄ¼ņä▒
ņĢĢļĀźņä╝ņä£ļŖö ņāüņĢĢĻ┤ĆņŚÉ 3Ļ░£ļź╝ ļ░░ņ╣śĒĢśņśĆĻ│Ā Ļ│ĀņĢĢĻ┤ĆņŚÉ 7Ļ░£ļź╝ ļ░░ņ╣śĒĢśņśĆļŗż. ņĢĢļĀźņä╝ņä£ļŖö ļÅÖņĀü ņĢĢļĀź ĒÖśĻ▓ĮņŚÉ ņé¼ņÜ®ņØ┤ Ļ░ĆļŖźĒĢśļÅäļĪØ ņŗżļ”¼ņĮś ņ¦æņĀü ņä╝ņä£ ĒāĆņ×ģņØä ņé¼ņÜ®ĒĢśņśĆļŗż.
ņāüņĢĢĻ┤ĆĻ│╝ Ļ│ĀņĢĢĻ┤Ć Ēøäļ░®ņØś 3Ļ░£ ņĢĢļĀźņä╝ņä£ļŖö Ļ▓®ļ¦ē ņĀäļ░®Ļ│╝ Ēö╝ņŖżĒåż ņĀäļ░®ņŚÉņä£ņØś ņĢĢļĀź ņØ┤ļĀźņØä Ļ│äņĖĪĒĢśĻĖ░ ņ£äĒĢ┤ 1 m ņØ┤ļé┤ņŚÉ ļ░░ņ╣śĒĢśņśĆņ£╝ļ®░ ņĢĢļĀź Ļ░ĢĒĢś ņŗ£Ļ░äņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņŗ£ĒŚśĒāäņØś ņåŹļÅäļź╝ Ļ│äņé░ĒĢĀ ņłś ņ׳ļÅäļĪØ ĒĢśņśĆļŗż[17]. Ļ░ü ņĢĢļĀźņä╝ņä£ņØś ņ£äņ╣śļŖö CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗż ņ£äņ╣śļź╝ ĻĖ░ņżĆņ£╝ļĪ£ Table 2ņÖĆ Ļ░Öļŗż. ņĢĢļĀźņä╝ņä£ļŖö ņŗ£ĒŚśĒāäņØ┤ K9 Ļ░Ģļé┤ņŚÉņä£ ļ░£ņé¼ļÉśļŖö ņŗ£ņĀÉņØä ĻĖ░ņżĆņ£╝ļĪ£ ņĢĢļĀźņØ┤ļĀźņØä ĻĖ░ļĪØĒĢśļÅäļĪØ ĻĄ¼ņä▒ĒĢśņśĆļŗż.
ņŗ£ĒŚś Ļ▓░Ļ│╝ ļ░Å Ļ│Āņ░░
3.1 ņŗ£ĒŚś ņĪ░Ļ▒┤
ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äņŚÉņä£ CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗż Ļ│äņĖĪņØä ĒåĄĒĢ┤ ņŗ£ĒŚśĒāäņŚÉ ļīĆĒĢ£ Ļ░ÉņåŹĒŖ╣ņä▒ņØä ĒÖĢņØĖĒĢśĻĖ░ ņ£äĒĢ┤ Table 3Ļ│╝ Ļ░ÖņØ┤ ņŗ£ĒŚśĒāä, ņןņĢĮ, Ļ▓®ļ¦ē, Ēö╝ņŖżĒåż, Ļ░ĆņŖżņĢĢ ļ░Å ļ¼╝ ņČ®ņ¦äļ¤ē ņĪ░Ļ▒┤ņØä ņé¼ņÜ®ĒĢśņśĆļŗż.
Table┬Ā3.
Test conditions of test projectile firing
| Projectile | Propellant | Diaphragm thickness /notch depth | Piston mass (rubber, wood) | Gas Pressure/Water Mass1) |
|---|---|---|---|---|
| Test Projectile (43.7 kg) | K677 No.5 | 2 mm/0.9 mm | 4 kg | 62 psi/25 kg |
ņŗ£ĒŚśĒāäņØĆ Fig. 7Ļ│╝ Ļ░ÖņØ┤ 513.2 mmņØś ĻĖĖņØ┤ņŚÉ 43.7 kg ņØś ņ¦łļ¤ēņØä Ļ░Ćņ¦Ćļ®░, ļé┤ļČĆņŚÉļŖö ņĢīļŻ©ļ»ĖļŖä ļŹöļ»Ėļź╝ ņéĮņ×ģĒĢśņŚ¼ 155 mm ņ¢æņé░ĒāäĻ│╝ ņ£Āņé¼ĒĢ£ ņ¦łļ¤ēņ£╝ļĪ£ ņĀ£ņ×æĒĢśņśĆļŗż. ņŗ£ĒŚśĒāäņØś ņ×¼ņ¦łņØĆ Steel 4340ņØ┤ļ®░ 38 mm ĒÅŁņØś ļÅÖļ░┤ļō£Ļ░Ć ĒĢśļŗ©ņŚÉ ņÜ®ņĀæļÉśņ¢┤ ņ׳ļŗż. ņŗ£ĒŚśĒāäņØĆ K9 Ļ░Ģļé┤ņŚÉņä£ ļ░£ņé¼ņŗ£ ņןņĢĮņŚÉ ņØśĒĢ£ ņĢĢļĀź(ņĢĮ 35,000 psi)ņØä ļ░øņ£╝ļ®░, Ļ┤Ćļé┤ņŚÉņä£ļŖö ņØ┤ļĪĀņĀüņ£╝ļĪ£ 2,000 psi ņØ┤ĒĢśņØś ļ░śņé¼ņČ®Ļ▓®Ēīī ņĢĢļĀźņØ┤ ņŗ£ĒŚśĒāä ņĀäļ░®ņŚÉ ņĀüņÜ®ļÉśļ»ĆļĪ£ ņŗ£ĒŚśĒāäņØ┤ ņĢĢļĀźĻ┤Ćļé┤ļź╝ ņØ┤ļÅÖĒĢśļŖö ļÅÖņĢłņŚÉļŖö ĻĄ¼ņĪ░Ļ▒┤ņĀäņä▒ ļ¼ĖņĀ£ļŖö ņŚåņØä Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ĒĢśņśĆļŗż.

K9 Ēżļ»ĖņĪ░ļ”Įņ▓┤ ņĢĮņŗżļé┤ Ļ░Ģļé┤ņĢĢļĀźņØĆ ļé┤ļČĆņŚÉ ņäżņ╣śļÉ£ ņĢĢļĀźņä╝ņä£ļĪ£ ņŗżņŗ£Ļ░ä Ļ│äņĖĪļÉśļ®░, ņāüņÜ® ĒöäļĪ£ĻĘĖļשņØä ĒåĄĒĢ┤ Ļ▓░Ļ│╝Ļ░Ć ĒÜŹļōØļÉ£ļŗż. ņČöņ¦ä ņןņĢĮņØĆ K677 ļŗ©ņ£äņןņĢĮ #5ĒśĖļź╝ ņé¼ņÜ®ĒĢśņśĆļŗż.
Ļ▓®ļ¦ēņØĆ 2 mm ļæÉĻ╗śļĪ£ ņĀ£ņ×æļÉśļ®░ ļģĖņ╣ś Ļ╣ŖņØ┤ļŖö 0.9 mm ļź╝ ņĀüņÜ®ĒĢśņśĆļŗż. Ēö╝ņŖżĒåżņØĆ ļéśļ¼┤ņÖĆ Ļ│Āļ¼┤ļź╝ ņĀüņĖĄĒĢśņŚ¼ 4 kgņØś ņżæļ¤ēņ£╝ļĪ£ ņĀ£ņ×æĒĢśņśĆņ£╝ļ®░ ņĀäļŗ©ļ¦üņØ┤ ņןņ░®ļÉśņ¢┤ ņČ®Ļ▓® ĒīīņŚÉ ņØśĒĢ┤ ņĀäļŗ©ļÉĀ ņłś ņ׳ļÅäļĪØ ĻĄ¼ņä▒ĒĢśņśĆļŗż.
3.2 ņŗ£ĒŚś Ļ▓░Ļ│╝
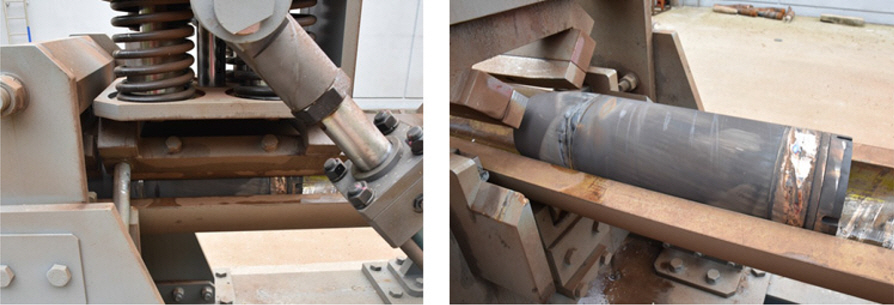
ņŗ£ĒŚś Ļ▓░Ļ│╝ļź╝ Table 4ņŚÉ ļéśĒāĆļé┤ņŚłļŗż. ņŗ£ĒŚśĒāä ņåŹļÅäļŖö ņāüņĢĢĻ┤Ć ņ×ģĻĄ¼ņŚÉņä£ CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżņŚÉ ņØśĒĢ┤ 775.4 m/s ņØś ņŗ£ĒŚśĒāä ņåŹļÅäļź╝ Ļ│äņĖĪĒĢśņśĆņ£╝ļ®░ ņÉÉĻĖ░ ļĖīļĀłņØ┤Ēü¼ļČĆņŚÉņä£ ļ®łņČöņŚłļŗż. Ļ░Ģļé┤ ņĢĢļĀźņØĆ 33,450 psiļĪ£ Ļ│äņĖĪļÉśņŚłļŗż.
Table┬Ā4.
Test results of SRS projectile firing
| Velocity1)(m/s) | Chamber Pressure2) (psi) | Residual Velocity |
|---|---|---|
| 775.4 | 33,450 | 0 m/s |
K9 ĒżņŚÉņä£ ļ░£ņé¼ļÉ£ ņŗ£ĒŚśĒāäņØĆ Fig. 8Ļ│╝ Ļ░ÖņØ┤ ņÉÉĻĖ░ ļĖīļĀłņØ┤Ēü¼ļČĆ 2ļŗ©ņŚÉņä£ ĒÜīņłśļÉśņŚłļŗż. Ēāäņ▓┤ņŚÉ ĻĘĀņŚ┤ņØ┤ļéś ļ│ĆĒśĢņØĆ ļ░£ņāØĒĢśņ¦Ć ņĢŖņĢśĻ│Ā Ēāäņ▓┤ ļÅÖļ░┤ļō£ļŖö ļ░┤ļō£ņ╗żĒä░ņŚÉ ņØśĒĢ┤ ņĀ£Ļ▒░ļÉ£ Ļ▓āņØä ņ£ĪņĢłņ£╝ļĪ£ ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż.
ņāüņĢĢĻ┤ĆĻ│╝ Ļ│ĀņĢĢĻ┤Ć ņé¼ņØ┤ņŚÉ ņäżņ╣śļÉ£ Ļ▓®ļ¦ēņØĆ Fig. 9ņÖĆ Ļ░ÖņØ┤ ņŗ£ĒŚśņĀäņŚÉļŖö ļģĖņ╣śĻ░Ć ņ׳ļŖö ņāüĒā£ļĪ£ ņäżņ╣śļÉśņŚłļŗżĻ░Ć ņŗ£ĒŚśĒāäņØ┤ ĒåĄĻ│╝ĒĢ£ ĒøäņŚÉļŖö ņÖĢĻ┤Ć ĒśĢĒā£ļĪ£ ĒÜīņłśļÉśņŚłļŗż. ņØ┤ļŖö ņČ®Ļ▓®ĒīīļĪ£ ņØĖĒĢ┤ ĒīīņŚ┤ļÉ£ Ļ▓®ļ¦ēņØä ņŗ£ĒŚśĒāäņØ┤ ĒåĄĻ│╝ĒĢśļ®┤ņä£ ņĢĢļĀźĻ┤Ć ļé┤ļ▓Įļ░®Ē¢źņ£╝ļĪ£ ļ▓īļĀżņŻ╝ĻĖ░ ļĢīļ¼ĖņØ┤ļŗż.
Ļ│ĀņĢĢĻ┤ĆĻ│╝ ļ¼╝ ņČ®ņ¦äļČĆ ņé¼ņØ┤ņŚÉ ņäżņ╣śļÉ£ Ēö╝ņŖżĒåżņØĆ Fig. 10Ļ│╝ Ļ░ÖņØ┤ ņĀäļŗ©ļ¦üĻ│╝ Ēö╝ņŖżĒåżņØ┤ ĒĢ£ ļ¬Ėņ▓┤ļĪ£ ļÉśņ¢┤ ņ׳ļŗżĻ░Ć ņČ®Ļ▓®ĒīīņŚÉ ņØśĒĢ┤ ņĀäļŗ©ļ¦üņØ┤ ņĀäļŗ©ļÉśļ®┤ Ēö╝ņŖżĒåżņØĆ ļ¼╝ņØä ļ░Ćņ¢┤ļé┤ļ®┤ņä£ ĒÜīņłśņןļ╣ä ņÖĖļČĆļĪ£ ņØ┤ļÅÖĒĢśņŚ¼ ļ¬©ļל ĒÜīņłśļČĆļĪ£ ņ¦äņ×ģĒĢśņśĆļŗż.

CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżļź╝ ņé¼ņÜ®ĒĢśņŚ¼ Fig. 11Ļ│╝ Ļ░ÖņØ┤ ņŗ£ĒŚśĒāäņØś ņåŹļÅä ļ░Å Ļ▒░ļ”¼ ņØ┤ļĀźņØä Ļ│äņĖĪĒĢśņśĆļŗż. ļÅäĒöīļ¤¼ Ļ│äņĖĪ Ļ▓░Ļ│╝ņŚÉņä£ ņŗ£ĒŚśĒāäņØś ņØ┤ļÅÖņŚÉ ļö░ļØ╝ ņĖĪņĀĢļÉ£ ļÅäĒöīļ¤¼ ņŻ╝Ēīīņłśļź╝ ĻĖ░ņżĆņ£╝ļĪ£ ļīĆņāüņ▓┤ņØś ņł£Ļ░äņåŹļÅäļź╝ Ļ│äņé░ĒĢśĻ│Ā ņł£Ļ░äņåŹļÅäļź╝ ĻĖ░ņżĆņ£╝ļĪ£ ļłäņĀüĻ▒░ļ”¼ļź╝ Ļ│äņé░ĒĢśņśĆļŗż.
Fig. 12 ļ░Å 13ņŚÉ Ļ░üĻ░ü ņāüņĢĢĻ┤ĆĻ│╝ Ļ│ĀņĢĢĻ┤ĆņØś ņĢĢļĀźņØ┤ļĀźņØä ļéśĒāĆļé┤ņŚłņ£╝ļ®░ ņČ®Ļ▓®ĒīīņØś ļ░£ņāØĻ│╝ ļ░śņé¼ ņČ®Ļ▓®ĒīīņØś ņāØņä▒ņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. ņĢäņÜĖļ¤¼ ņŗ£ĒŚśĒāäņØ┤ ņĢĢļĀźņä╝ņä£ ņ£äņ╣śļź╝ ņ¦Ćļé£Ēøä ĻĖēĻ▓®ĒĢ£ ņĢĢļĀźĻ░ĢĒĢśĻ░Ć ļ░£ņāØĒĢśļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ņ£╝ļ®░ ņØ┤ļź╝ ĒåĄĒĢ┤ ņŗ£ĒŚśĒāäņØś ņåŹļÅäļź╝ Ļ│äņé░ĒĢĀ ņłś ņ׳ļŗż.

ņāüĻĖ░ ņŗ£ĒŚśņØä ĒåĄĒĢ┤ ĒāäļÅäņĢĢņČĢņŗØ ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äĻ░Ć ņ┤łņØīņåŹ ņŗ£ĒŚśĒāä ĒÜīņłśņŚÉ ņĀüņÜ®ņØ┤ Ļ░ĆļŖźĒĢ©ņØä ĒÖĢņØĖĒĢśņśĆņ£╝ļ®░, ņĢĢļĀźĻ┤Ć ļé┤ļČĆļź╝ ņøÉĒśĢļÅäĒīīĻ┤Ćņ£╝ļĪ£ Ļ░ĆņĀĢĒĢśņŚ¼ ņŗ£ĒŚśĒāä ņåŹļÅäļź╝ CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżļź╝ ĒåĄĒĢ┤ Ļ│äņĖĪĒĢĀ ņłś ņ׳ņØīņØä ĒÖĢņØĖĒĢśņśĆļŗż.
ĒĢ┤ņäØņĀü ļ¬©ļŹĖ ļ░Å Ļ▓░Ļ│╝ Ļ│Āņ░░
4.1 ņłśņ╣śĒĢ┤ņäØ ļ¬©ļŹĖ Ļ░£ņÜö
ņ┤łņØīņåŹņ£╝ļĪ£ ļ░£ņé¼ļÉ£ ņŗ£ĒŚśĒāäņØ┤ ĒÜīņłśņןļ╣äļĪ£ ņ¦äņ×ģĒĢśļ®┤ ņŗ£ĒŚśĒāäņØś ļ╣ĀļźĖ ņØ┤ļÅÖņåŹļÅäļĪ£ ņØĖĒĢ┤ ņČ®Ļ▓®ĒīīĻ░Ć ļ░£ņāØĒĢśļ®░ ņĢĢļĀźĻ┤Ć ļ░®Ē¢źņØä ļö░ļØ╝ ņłśĒÅēņ£╝ļĪ£ ņĀäĒīīļÉ£ļŗż. ņČ®Ļ▓®ĒīīļŖö ņŗ£ĒŚśĒāäņØś ņĀäļ░®ņŚÉņä£ ļ░£ņāØĒĢśņŚ¼ ņ¦äĒ¢ēļ░®Ē¢źņØś Ļ▓®ļ¦ē ļ░Å Ēö╝ņŖżĒåżņŚÉņä£ ļ░śņé¼ļÉśĻ│Ā ļ░śņé¼ļÉ£ ņČ®Ļ▓®ĒīīļŖö ņŗ£ĒŚśĒāäņØś ņäĀļæÉļČĆņŚÉ ņ×æņÜ®ĒĢśļŖö ņ£ĀļÅÖņĢĢļĀźņØä ĻĖēĻ▓®ĒĢśĻ▓ī ņāüņŖ╣ņŗ£ņ╝£ ņŗ£ĒŚśĒāäņØä Ļ░ÉņåŹņŗ£Ēé©ļŗż. ņŗØ (4)ņÖĆ Ļ░ÖņØ┤ ņśżņØ╝ļ¤¼ ļ░®ņĀĢņŗØņØä ņ¦Ćļ░░ļ░®ņĀĢņŗØņ£╝ļĪ£ ĒĢśņŚ¼ ņłśņ╣śĒĢ┤ņäØņØä ņłśĒ¢ēĒĢśņśĆņ£╝ļ®░ ĒÜīņłśņןļ╣ä ņĀäņ▓┤ņŚÉ ļīĆĒĢ£ ņØ╝ņ░©ņøÉ Ļ│ĀņĀĢĻ▓®ņ×ÉĻ│äļź╝ ņäżņĀĢĒĢśņśĆļŗż[8].
ņØ┤ļĢī ļ│┤ņĪ┤ļ│Ćņłś ļ▓ĪĒä░ UņÖĆ ņ£Āļ¤ē ļ▓ĪĒä░ FļŖö ņŗØ (5)ņÖĆ Ļ░Öļŗż. ŽüņÖĆ pļŖö ņ£ĀļÅÖņØś ļ░ĆļÅäņÖĆ ņĢĢļĀźņØ┤Ļ│Ā uļŖö xļ░®Ē¢źņØś ņ£ĀļÅÖņåŹļÅä, eļŖö ļŗ©ņ£ä ņ¦łļ¤ēļŗ╣ ņĀäņŚÉļäłņ¦ĆļĪ£ ļé┤ļČĆņŚÉļäłņ¦Ćļź╝ ļéśĒāĆļéĖļŗż.
ņČ®Ļ▓®ĒīīņÖĆ Ļ░ÖņØ┤ ņ£ĀļÅÖņŚÉ ļČłņŚ░ņåŹņä▒ņØ┤ ĒżĒĢ©ļÉśļŖö Ļ▓ĮņÜ░ ņ┤łĻĖ░ņ╣ś ļČłņŚ░ņåŹ ļ¼ĖņĀ£ņØĖ Riemann ļ¼ĖņĀ£ļź╝ ņĀüņÜ®ĒĢĀ ņłś ņ׳ļŗż. ņĢäņÜĖļ¤¼ Godunov ĻĖ░ļ▓ĢņŚÉ ļö░ļØ╝ ņØ┤ņé░ĒÖöļÉ£ ņĀüļČä ĒśĢĒā£ļĪ£ Ēæ£ĒśäĒĢśļ®┤ ņŗØ (6)Ļ│╝ Ļ░Öļŗż.
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö HLL Riemann solverņŚÉ ņØśĒĢ£ ĒĢ┤ļŖö ĒīīņåŹņØĖ SLĻ│╝ SRņŚÉ ņØśĒĢ┤ 3Ļ░£ņØś ĻĄ¼Ļ░äņ£╝ļĪ£ ļéśļłī ņłś ņ׳ņ£╝ļ®░, Ļ░ü ĻĄ¼Ļ░äņŚÉņä£ ļ│┤ņĪ┤ļ│ĆņłśĻ░Ć Ļ│äņé░ļÉśļ®░ ņŗØ (7)Ļ│╝ Ļ░ÖņØ┤ Ēæ£ĒśäĒĢĀ ņłś ņ׳ļŗż[15].
ņŗ£ĒŚśĒāäņØś ņåŹļÅäņÖĆ ļ│Ćņ£äļŖö ņŗØ (8)Ļ│╝ Ļ░ÖņØĆ ņÜ┤ļÅÖ ļ░®ņĀĢņŗØņ£╝ļĪ£ļČĆĒä░ Ļ│äņé░ĒĢĀ ņłś ņ׳ļŗż.
ņŚ¼ĻĖ░ņŚÉņä£ MprojņØĆ ņŗ£ĒŚśĒāäņØś ņ¦łļ¤ē, ņśżņØ╝ļ¤¼ ļ░®ņĀĢņŗØņ£╝ļĪ£ļČĆĒä░ Ļ│äņé░ļÉśļŖö PprojļŖö ĒāäļæÉļČĆņŚÉ ņ×æņÜ®ĒĢśļŖö ņĢĢļĀź, PatmņØĆ ņŗ£ĒŚśĒāä Ēøäļ░®ņŚÉ ņ×æņÜ®ĒĢśļŖö ļīĆĻĖ░ņĢĢņØ┤Ļ│Ā AprojļŖö ņŗ£ĒŚśĒāäņØś ļŗ©ļ®┤ņĀüņØ┤ļŗż.
4.2 CW ļÅäĒöīļ¤¼ Ļ│äņĖĪĻ▓░Ļ│╝ņÖĆ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ņØś ļ╣äĻĄÉ
ņŗ£ĒŚśĒāä ņåŹļÅäņŚÉ ļīĆĒĢ┤ ņØ┤ļĪĀņĀü/ņŗżĒŚśņĀü ļ╣äĻĄÉļź╝ ņ£äĒĢ┤ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Table 5ņÖĆ Ļ░ÖņØ┤ ņŗ£ĒŚś ņĪ░Ļ▒┤Ļ│╝ ļÅÖņØ╝ĒĢ£ ļ│Ćņłś ļź╝ ņØ┤ņÜ®ĒĢ£ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ņÖĆ CW ļÅäĒöīļ¤¼ Ļ│äņĖĪ Ļ▓░Ļ│╝ļź╝ ļ╣äĻĄÉĒĢśņśĆļŗż. ņĢäņÜĖļ¤¼ CW ļÅäĒöīļ¤¼ ņŻ╝Ēīīņłś ņłśņŗĀĻ░ÆņŚÉļŖö ļģĖņØ┤ņ”łĻ░Ć ĒżĒĢ©ļÉśĻĖ░ ļĢīļ¼ĖņŚÉ ĒĢäĒä░ļ¦üņØ┤ ņÜöĻĄ¼ļÉśļ®░ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Averaging ĒĢäĒä░(ĒÅēĻĘĀĻ░»ņłś: 50Ļ░£)ņÖĆ Kalman ĒĢäĒä░(Process Noise Variance: 0.10, Measure Noise Variance: 2.00)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ CW ļÅäĒöīļ¤¼ Ļ│äņĖĪĻ░ÆņØä ļ│┤ņĀĢĒĢśņśĆļŗż[18].
Table┬Ā5.
Parameters of numerical analysis
| Parameter | Value |
|---|---|
| Projectile mass(kg) | 43.7 |
| Burst pressure, diaphragm, piston(psi) | 120 |
| Gas pressure(psi,) | 62 |
| Water filled mass(kg) | 25 |
| Piston mass(kg) | 4 |
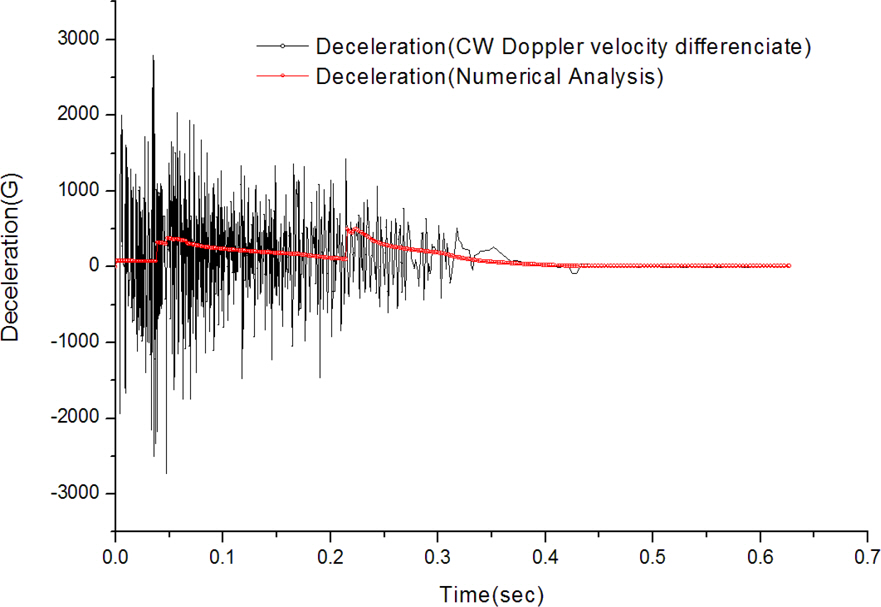
Fig. 14ņŚÉ ņŗ£ĒŚśĒāäņØś CW ļÅäĒöīļ¤¼ Ļ│äņĖĪņŚÉ ņØśĒĢ£ ņåŹļÅäņÖĆ ņØ┤ ņåŹļÅäņŚÉ ņØśĒĢ£ Ļ▒░ļ”¼ Ļ▓░Ļ│╝ļź╝ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ņÖĆ ĒĢ©Ļ╗ś ļÅäņŗ£ĒĢśņśĆļŗż. Ļ░ü ļŹ░ņØ┤Ēä░ļź╝ ļÅÖņØ╝ĒĢ£ ņŗ£Ļ░äņČĢņŚÉņä£ ļ╣äĻĄÉĒĢśĻĖ░ ņ£äĒĢ┤ ņŗ£ĒŚśĒāäņØ┤ ņāüņĢĢĻ┤Ć(PET) ņ×ģĻĄ¼, ņ”ē CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗż ĒĢśļČĆļź╝ ĒåĄĻ│╝ĒĢśļŖö ņŗ£ņĀÉņØä ĻĖ░ņżĆņ£╝ļĪ£ ļ╣äĻĄÉĒĢśņśĆļŗż.
Fig.┬Ā14.
Comparisons of CW doppler radar measurements and numerical analysis results of test projectile
ņåŹļÅä ņĖĪļ®┤ņŚÉņä£ ņłśņ╣śĒĢ┤ņäØņØś ņ▓½ ļ▓łņ¦Ė ļ│ĆĻ│ĪņĀÉņØĆ Ļ▓®ļ¦ēņØ┤ ņäżņ╣śļÉ£ 30 m ņ£äņ╣śņŚÉņä£ 0.04ņ┤łņŚÉ ļ░£ņāØĒĢśļ®░ ņåŹļÅä ņ░©ņØ┤ļŖö 3.55 m/sļĪ£ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝Ļ░Ć ļŹö Ēü¼ļŗż. ļæÉ ļ▓łņ¦Ė ļ│ĆĻ│ĪņĀÉņØĆ Ēö╝ņŖżĒåżņØ┤ ņ׳ļŖö 130 m ņ£äņ╣śņŚÉņä£ 0.21ņ┤łņŚÉ ļ░£ņāØĒĢśļ®░ ņåŹļÅäņ░©ņØ┤ļŖö 27.41 m/sļĪ£ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝Ļ░Ć ļŹö Ēü¼ļŗż. ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ņŚÉņä£ ņåŹļÅäĻ░ÆņØĆ ļČäļ¬ģĒĢśĻ▓ī Ļ░ÉņåŹļÅäņŚÉ ņØśĒĢ┤ ņåŹļÅäņØś ĻĖ░ņÜĖĻĖ░Ļ░Ć ļ│ĆĒĢśļŖö Ļ▓āņØä ļ│┤ņŚ¼ņŻ╝ļŖö ļ░śļ®┤ CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżņŚÉ ņØśĒĢ£ ņŗ£ĒŚśĒāäņØś Ļ│äņĖĪĻ▓░Ļ│╝ļŖö ņāüņĢĢĻ┤Ć Ļ▓®ļ¦ēņŚÉņä£ņØś ļ│ĆĻ│ĪņĀÉļ¦īņØä ļ│┤ņŚ¼ņŻ╝ļ®░ Ēö╝ņŖżĒåż ļČĆĻĘ╝ņŚÉņä£ ĻĖ░ņÜĖĻĖ░ļŖö ļ│ĆĒĢśņ¦Ć ņĢŖļŖö ņ░©ņØ┤ņĀÉņØä ļ│┤ņŚ¼ņżĆļŗż.
Ļ│äņĖĪļÉ£ ņŗ£ĒŚśĒāäņØś ņåŹļÅäņÖĆ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ņØś ņ░©ņØ┤Ļ░Ć ļ░£ņāØĒĢśļŖö ņŗ£Ļ░äņØĆ 0.18ņ┤łņØ┤ļ®░, ņØ┤ņŗ£Ļ░äņØĆ Ēö╝ņŖżĒåżņØ┤ ĒīīņŚ┤ļÉśņ¢┤ ņØ┤ļÅÖĒĢśļŖö ņŗ£Ļ░äĻ│╝ ļÅÖņØ╝ĒĢśļŗż. ņ”ē, ņłśņ╣śĒĢ┤ņäØņŚÉņä£ Ēö╝ņŖżĒåżņØś ņØ┤ļÅÖņåŹļÅäĻ░Ć ņŗżĒŚś Ļ▓░Ļ│╝ņÖĆ ņ░©ņØ┤Ļ░Ć ļ░£ņāØĒĢ£ļŗżļ®┤ ņŗ£ĒŚśĒāäņØś ņŗżĒŚśĻ▓░Ļ│╝ņÖĆ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ ņé¼ņØ┤ņŚÉļÅä ņ░©ņØ┤Ļ░Ć ļ░£ņāØĒĢśĻ▓ī ļÉśļ»ĆļĪ£, Ēö╝ņŖżĒåżņØś Ļ▒░ļÅÖņŚÉ ļīĆĒĢ£ ņłśņ╣śĒĢ┤ņäØ ļ¬©ļŹĖņØś ļ│┤ļŗż ņĀĢĒÖĢĒĢ£ ļ¬©ņé¼Ļ░Ć ĒĢäņÜöĒĢĀ Ļ▓āņ£╝ļĪ£ ļ│┤ņØĖļŗż. ļśÉĒĢ£, ņłśņ╣śĒĢ┤ņäØņŚÉņä£ Ļ│äņé░ļÉ£ ļ░śņé¼ ņČ®Ļ▓®ĒīīņØś Ēü¼ĻĖ░Ļ░Ć ņŗżņĀ£ ņŗżĒŚśņŚÉņä£ļŖö ļåÆņ¦Ć ņĢŖĻ▓ī ļéśĒāĆļé£ Ļ▓āņ£╝ļĪ£ ļ│╝ ņłś ņ׳ļŗż. ņāü ĻĖ░ņÖĆ Ļ░ÖņØ┤ ļ│Ė ņŗżĒŚśņŚÉņä£ ņŗ£ĒŚśĒāäņØ┤ Ēö╝ņŖżĒåż ņ£äņ╣śļĪ£ ņĀæĻĘ╝ĒĢĀ ļĢī ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ņÖĆ Ļ░ÖņØĆ ĻĖēĻ▓®ĒĢ£ ņåŹļÅäņØś ļ│ĆĻ│ĪņĀÉņØ┤ ļéśĒāĆļéśņ¦Ć ņĢŖļŖö Ļ▓āņØĆ ņĢĢļĀźĻ┤Ć ļé┤ļČĆņŚÉņä£ Ļ░ÉņåŹļÅäļź╝ ņĄ£ņåīĒÖöĒĢ┤ņĢ╝ ĒĢśļŖö ņŗżĒŚśņ×É Ļ┤ĆņĀÉņŚÉņä£ ņóŗņØĆ ĒÜ©Ļ│╝ļĪ£ ļ░øņĢäļōżņØ╝ ņłś ņ׳ļŗż.
Ļ▒░ļ”¼ņĖĪļ®┤ņŚÉņä£ļŖö 0.26ņ┤ł ņØ┤ĒøäņŚÉ ņåŹļÅä ņ░©ņØ┤ņŚÉ ņØśĒĢ┤ Ļ▒░ļ”¼ņØś ņ░©ņØ┤ļÅä ļ░£ņāØĒĢśļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. CW ļÅäĒöīļ¤¼ Ļ│äņĖĪņŚÉ ņØśĒĢ£ ņåŹļÅä ņ░©ņØ┤ņŚÉ ņØśĒĢ┤ ļłäņĀüļÉ£ Ļ▒░ļ”¼ Ļ▓░Ļ│╝ļŖö 5 m ļé┤ņÖĖļĪ£ ĒÖĢņØĖļÉśņŚłļŗż.
ņĀäļ░śņĀüņØĖ ņåŹļÅäņÖĆ Ļ▒░ļ”¼Ļ░ÆņØś ļ╣äĻĄÉļŖö CW ļÅäĒöīļ¤¼ Ļ│äņĖĪĻ░ÆĻ│╝ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝Ļ░Ć ņ£Āņé¼ĒĢ©ņØä ļ│┤ņŚ¼ņŻ╝Ļ│Ā ņ׳ļŗż.
Fig. 15ļŖö Ļ░ÉņåŹļÅä Ļ▓░Ļ│╝Ļ░ÆņØś ļ╣äĻĄÉļź╝ ļéśĒāĆļé┤Ļ│Ā ņ׳ļŗż. CW ļÅäĒöīļ¤¼ Ļ│äņĖĪ ņåŹļÅäņØś ļ»ĖļČäĻ░ÆņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņłśņ╣ś ĒĢ┤ņäØ Ļ▓░Ļ│╝ņÖĆ ļ╣äĻĄÉĒĢśņśĆļŗż. ņłśņ╣śĒĢ┤ņäØņŚÉņä£ ļÅäņČ£ļÉ£ Ļ░ÉņåŹļÅä Ļ▓░Ļ│╝Ļ░Ć CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżņØś ņåŹļÅä Ļ▓░Ļ│╝ņ▓śļ¤╝ Ļ▓Ćņ”Ø ļ░Å ļ╣äĻĄÉĻ░Ć Ļ░ĆļŖźĒĢ£ņ¦Ć ĒÖĢņØĖĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŗż. ņłśņ╣śĒĢ┤ņäØņØś Ļ▓ĮņÜ░ ņĄ£ļīĆ Ļ░ÉņåŹļÅäļŖö 0.04ņ┤ł(Ļ▓®ļ¦ē ļČĆĻĘ╝)ņÖĆ 0.21ņ┤ł(Ēö╝ņŖżĒåż ļČĆĻĘ╝)ņŚÉņä£ ļ░£ņāØĒĢśļ®░, Fig. 14ņŚÉņä£ ļ│ĆĻ│ĪņĀÉņØ┤ ļéśĒāĆļéśļŖö ņŗ£Ļ░äĻ│╝ ņØ╝ņ╣śĒĢ£ļŗż. ņ”ē, ņŗ£ĒŚśĒāäņØś Ļ░ÉņåŹĒŖ╣ņä▒ņŚÉ Ēü░ ņśüĒ¢źņØä ļ»Ėņ╣śļŖö ļ░śņé¼ņČ®Ļ▓®ĒīīĻ░Ć ņŗ£ĒŚśĒāä ņĀäļ░®ņŚÉ ļČĆļö¬Ē×ī ņŗ£Ļ░äņØ┤ļŗż. ĒĢśņ¦Ćļ¦ī, CW ļÅäĒöīļ¤¼ Ļ│äņĖĪņŚÉ ņØśĒĢ£ Ļ░ÉņåŹļÅä Ļ░ÆņØĆ RF Ļ│äņĖĪņŚÉ ņØśĒĢ£ ĒŖ╣ņä▒ņ£╝ļĪ£ ņØĖĒĢ┤ Ļ│ĀņŻ╝Ēīīņłś ņä▒ļČäņØ┤ ļŗżņłś ļéśĒāĆļé£ Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. Table 6ņŚÉ ņĄ£ļīĆ Ļ░ÉņåŹļÅäņÖĆ ļ░£ņāØ ņŗ£Ļ░äņØä ļéśĒāĆļé┤Ļ│Ā ņ׳ļŗż. Ļ▓®ļ¦ē ļ░Å Ēö╝ņŖżĒåż ļČĆĻĘ╝ņŚÉņä£ Ļ░ÉņåŹļÅäņØś Ļ▓ĮņÜ░ RF Ļ│äņĖĪ ĒŖ╣ņä▒ņŚÉ ņØśĒĢ┤ ņ¦üņĀæņĀüņØĖ ļ╣äĻĄÉļŖö ņ¢┤ļĀżņÜ┤ Ļ▓āņ£╝ļĪ£ ļéśĒāĆļé¼ļŗż.
4.3 ņĢĢļĀź Ļ│äņĖĪĻ▓░Ļ│╝ņÖĆ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ņØś ļ╣äĻĄÉ
ņĢĢļĀźņä╝ņä£ļź╝ ņØ┤ņÜ®ĒĢ£ ņŗ£ĒŚśĒāäņØś ņåŹļÅä Ļ│äņé░ņØĆ Fig. 12 ļ░Å Fig. 13ņØś ņĢĢļĀźņØ┤ļĀź Ļ▓░Ļ│╝ļź╝ ņØ┤ņÜ®ĒĢśņśĆļŗż. ņĢĢļĀźņØ┤ļĀź Ļ▓░Ļ│╝ņŚÉņä£ ņŗ£ĒŚśĒāäņØ┤ ĒåĄĻ│╝ĒĢ£ Ēøä ļīĆĻĖ░ņĢĢ(14.7 psi)ņØ┤ĒĢśļĪ£ ļ¢©ņ¢┤ņ¦ĆļŖö ņŗ£Ļ░äĻ│╝ ņĢĢļĀźņä╝ņä£(#1~#3, #8~#10)Ļ░ä Ļ▒░ļ”¼ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņĢĢļĀźņä╝ņä£Ļ░ä ņżæņŗ¼ņŚÉņä£ ņŗ£ĒŚśĒāäņØś ĒÅēĻĘĀ ņåŹļÅäļź╝ Ļ│äņé░ĒĢśņśĆļŗż. Table 7 ļ░Å Fig. 16ņŚÉ ņĢĢļĀźņä╝ņä£Ļ░Ć ņ£äņ╣śĒĢ£ Ļ▒░ļ”¼ ĻĖ░ņżĆņ£╝ļĪ£ CW ļÅäĒöīļ¤¼ Ļ│äņĖĪņŚÉ ņØśĒĢ£ ņåŹļÅä, ņłśņ╣śĒĢ┤ņäØņŚÉ ņØśĒĢ£ ņåŹļÅä, ļ░Å ņĢĢļĀźņä╝ņä£ņŚÉ ņØśĒĢ┤ Ļ│äņé░ļÉ£ ņåŹļÅäļź╝ ĒĢ©Ļ╗ś ļÅäņŗ£ĒĢśņśĆļŗż. ņĢĢļĀźņä╝ņä£ Ļ│äņĖĪĻ▓░Ļ│╝ļź╝ ņŗ£Ļ░ä ņČĢņŚÉ ļéśĒāĆļé┤ņ¦Ć ņĢŖĻ│Ā Ļ▒░ļ”¼ ņČĢņØä ņØ┤ņÜ®ĒĢ£ ņØ┤ņ£ĀļŖö ņĢĢļĀźĻ▓░Ļ│╝ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņŗ£ĒŚśĒāäņØś ņāüņĢĢĻ┤Ć ņ¦äņ×ģņŗ£Ļ░äņØä ņĀĢĒÖĢĒ׳ ņČöņĀĢĒĢśĻĖ░ ņ¢┤ļĀĄĻĖ░ ļĢīļ¼ĖņØ┤ļŗż.
Table┬Ā7.
Comparisons of velocity between CW doppler, numerical analysis, and pressure transducers
| Location |
Velocity(m/s) |
||
|---|---|---|---|
| CW dopper | Numerical analysis | pressure transducer(avg) | |
| 29.18 m | 737.35 | 745.76 | 710.01 |
| 132.18 m | 286.39 | 288.49 | 279.58 |
Ļ▒░ļ”¼ņŚÉ ļö░ļźĖ ņåŹļÅä ļ│ĆĒÖöļź╝ ļ╣äĻĄÉĒĢ┤ļ│┤ļ®┤ Ļ▓®ļ¦ē ņ£äņ╣ś(29.18 m)ņŚÉņä£ CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗż Ļ│äņĖĪĻ▓░Ļ│╝ļź╝ ĻĖ░ņżĆņ£╝ļĪ£ ņłśņ╣śĒĢ┤ņäØĻ▓░Ļ│╝ļŖö 1.1 %, ņĢĢļĀźņä╝ņä£ņŚÉ ņØśĒĢ£ Ļ▓░Ļ│╝ļŖö ŌłÆ3.7 % ņ░©ņØ┤Ļ░Ć ļ░£ņāØĒĢśņśĆļŗż. ņ”ē, ņŗ£ĒŚśĒāäņØ┤ Ļ▓®ļ¦ēņŚÉ ĻĘ╝ņĀæĒĢĀ ļĢī ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ļŖö CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗż Ļ│äņĖĪĻ▓░Ļ│╝ņÖĆ ļ¦żņÜ░ ņ£Āņé¼ĒĢśļŗżĻ│Ā ļ│╝ ņłś ņ׳ņ£╝ļ®░, ņĢĢļĀźņä╝ņä£ņŚÉ ņØśĒĢ£ ņŗ£ĒŚśĒāä ņåŹļÅäņØś Ļ▓ĮņÜ░ ņłśņ╣śĒĢ┤ņäØ ļīĆļ╣ä ņśżņ░©Ļ░Ć ņāüļīĆņĀüņ£╝ļĪ£ Ēü¼ļŗżĻ│Ā ļ│╝ ņłś ņ׳ļŗż. ĻĘĖ ņØ┤ņ£ĀļŖö ņĢĢļĀźņä╝ņä£ņØś Ļ▓ĮņÜ░ 0.95 m ņØ┤Ļ▓®ļÉ£ ņ£äņ╣śņØś 2Ļ░£ ņä╝ņä£ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ĒÅēĻĘĀņåŹļÅäļź╝ Ļ│äņé░ĒĢśņśĆņ£╝ļ®░, ņŗ£ĒŚśĒāä ĒåĄĻ│╝ņŗ£Ļ░ä Ļ│äņé░Ļ│╝ņĀĢņŚÉņä£ ņśżņ░©Ļ░Ć ļ░£ņāØĒĢĀ ņłś ņ׳ņØä Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ĒĢśņśĆļŗż. ņ”ē, ņŗ£ĒŚśĒāä ĒåĄĻ│╝ņŚÉ ļö░ļźĖ ņĢĢļĀźĻ░ĢĒĢś ĻĖ░ņżĆĻ░ÆņŚÉ ļö░ļźĖ ņŗ£Ļ░äĻ│╝ ņŗżņĀ£ ņŗ£ĒŚśĒāäņØ┤ ĒåĄĻ│╝ĒĢ£ ņŗ£Ļ░äĻ│╝ ļŗżņåī ņ░©ņØ┤Ļ░Ć ņ׳ņØä Ļ▓āņ£╝ļĪ£ ļ│┤ņØĖļŗż.
Fig.┬Ā16.
Comparisons of velocities between numerical analysis, CW Doppler radar, and pressure transducers
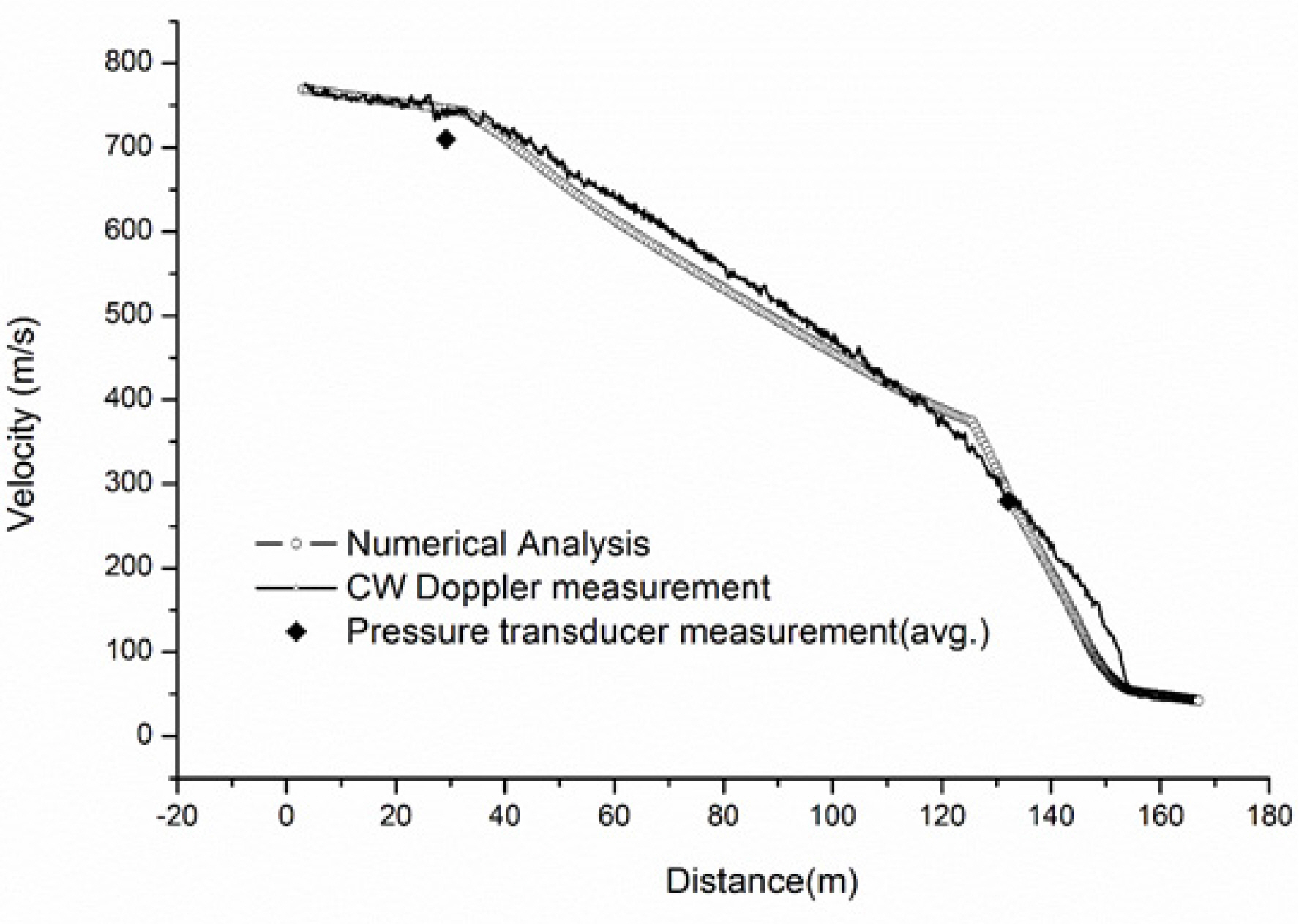
Ēö╝ņŖżĒåż ņ£äņ╣ś(132.18 m)ņØś Ļ▓ĮņÜ░ CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżļź╝ ĻĖ░ņżĆņ£╝ļĪ£ ņłśņ╣śĒĢ┤ņäØĻ▓░Ļ│╝ļŖö 0.7 %, ņĢĢļĀźņä╝ņä£ņŚÉ ņØśĒĢ£ Ļ▓░Ļ│╝ļŖö ŌłÆ2.4 %ņØś ņ░©ņØ┤Ļ░Ć ĒÖĢņØĖļÉśņŚłļŗż. Ļ▓®ļ¦ē ņ£äņ╣śņŚÉņä£ņÖĆ ņ£Āņé¼ĒĢśĻ▓ī ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ļŖö CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗż Ļ│äņĖĪĻ▓░Ļ│╝ņÖĆ ņ£Āņé¼ĒĢśņśĆĻ│Ā, ņĢĢļĀźņä╝ņä£ļŖö ļŗżņåī ņ×æņØĆ ņåŹļÅäĻ░ÆņØä ļéśĒāĆļé┤ņŚłļŗż. ņØ┤ļź╝ ĒåĄĒĢ┤ ņĢĢļĀźņä╝ņä£ ņ£äņ╣śļź╝ ĒåĄĻ│╝ĒĢśļŖö ņŗ£ĒŚśĒāä Ēøäļ░® ņĢĢļĀźĻĖ░ņżĆņØä ņ¢┤ļ¢╗Ļ▓ī ņäżņĀĢĒĢśļŖÉļāÉĻ░Ć ņżæņÜöĒĢĀ Ļ▓āņ£╝ļĪ£ ļ│┤ņØĖļŗż. ņĢäņÜĖļ¤¼ 123 m ņ£äņ╣śļź╝ ĻĖ░ņżĆņ£╝ļĪ£ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ļŖö ļ│ĆĻ│ĪņĀÉņØä ļ│┤ņØ┤ļéś CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗż Ļ▓░Ļ│╝ ņŚÉņä£ļŖö ļ│ĆĻ│ĪņĀÉ ņŚåņØ┤ ņŗ£ĒŚśĒāäņØ┤ Ļ░ÉņåŹĒĢśļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. ņłśņ╣śĒĢ┤ņäØņāüņØś ĻĖēĻ▓®ĒĢ£ ņåŹļÅä ĻĖ░ņÜĖĻĖ░ ļ│ĆĒÖöļŖö 4.2ņĀłņŚÉņä£ ļģ╝ņØśĒĢ£ ļ░öņÖĆ Ļ░ÖņØ┤ ņŗżņĀ£ ņŗżĒŚśņŚÉņä£ļŖö ņåŹļÅäņØś ļ│ĆĻ│ĪņĀÉņØ┤ ļ░£ņāØĒĢĀ ņĀĢļÅäņØś ļ░śņé¼ņČ®Ļ▓®ĒīīĻ░Ć ļ░£ņāØĒĢśņ¦Ć ņĢŖņØĆ Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ņŚłļŗż.
Ļ▓®ļ¦ē ļ░Å Ēö╝ņŖżĒåż ņ£äņ╣śņŚÉņä£ņØś ņŗ£ĒŚśĒāä ņåŹļÅä ļ╣äĻĄÉņŗ£ ņĀäļ░śņĀüņ£╝ļĪ£ CW ļÅäĒöīļ¤¼ Ļ│äņĖĪĻ▓░Ļ│╝, ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ ļ░Å ņĢĢļĀź Ļ│äņĖĪĻ▓░Ļ│╝Ļ░Ć Ļ▓®ļ¦ē ļ░Å Ēö╝ņŖżĒåż ļČĆĻĘ╝ņŚÉņä£ 4 % ņØ┤ļé┤ņØś ņ░©ņØ┤ļź╝ Ļ░¢ļŖö Ļ▓āņ£╝ļĪ£ ļéśĒāĆļé¼ļŗż.
Ļ▓░ ļĪĀ
ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ļŖö K9 ĒżņŚÉņä£ ļ░£ņé¼ļÉ£ ĒāäņĢĮņØś ĒÜīņłśļź╝ ņ£äĒĢ┤ Ļ░£ļ░£ļÉ£ ņĀĆĻ░ÉņåŹ ĒÜīņłśņןļ╣äņØś ņŗżĒŚśĻ▓░Ļ│╝ņÖĆ ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ļź╝ ļ╣äĻĄÉĒĢśņśĆļŗż.
ņłśņ╣śĒĢ┤ņäØņØä ĒåĄĒĢ┤ Ļ│äņé░ļÉ£ Ļ░ĆņŖż ļ░Å ļ¼╝ ņČ®ņ¦äļ¤ēņØĆ ņŗ£ĒŚśĒāäņØś ņóģļ¦ÉņåŹļÅä ļ░Å Ļ░ÉņåŹļÅäņŚÉ Ēü░ ņśüĒ¢źņØä ļ»Ėņ╣śĻĖ░ ļĢīļ¼ĖņŚÉ ņĀĢĒÖĢĒĢ£ ņØ┤ļĪĀņĀü ĒĢ┤ Ļ░£ļ░£ņØ┤ ĒĢäņÜöĒĢśļ®░, Ļ░£ļ░£ļÉ£ ņØ┤ļĪĀņĀü ĒĢ┤ļź╝ Ļ▓Ćņ”ØĒĢśĻĖ░ ņ£äĒĢ┤ ļ│Ė ņŗ£ĒŚśņØä ņłśĒ¢ēĒĢśņśĆļŗż. Ļ░£ļ░£ļÉ£ ņŗ£ĒŚś ņןļ╣äņŚÉļŖö ņŗ£ĒŚśĒāäņØś ņåŹļÅä ļ░Å Ļ▒░ļ”¼ļź╝ Ļ│äņĖĪĒĢśĻĖ░ ņ£äĒĢ£ CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗż ļ░Å ņĢĢļĀźņä╝ņä£ļź╝ ņןņ░®ĒĢśņśĆĻ│Ā ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ņÖĆ ļ╣äĻĄÉļź╝ ņ£äĒĢ┤ ņŗ£ĒŚśņØä ņłśĒ¢ēĒĢśņśĆļŗż. ņ┤łņØīņåŹņ£╝ļĪ£ ļ░£ņé¼ļÉ£ ņŗ£ĒŚśĒāäņØĆ ņČ®ņ¦äļÉ£ Ļ░ĆņŖżņÖĆ ļ¼╝ņŚÉ ņØśĒĢ┤ Ļ░ÉņåŹļÉśņ¢┤ ĒÜīņłśņןļ╣äņØś ņóģļ¦Éļŗ©ņŚÉņä£ ļ®łņČöņŚłņØīņØä ĒÖĢņØĖĒĢśņśĆĻ│Ā, Ļ│äņĖĪļÉ£ ņŗ£ĒŚśĒāäņØś ņåŹļÅä ļ░Å Ļ▒░ļ”¼ļź╝ 1ņ░©ņøÉ Euler ļ░®ņĀĢņŗØĻ│╝ Godunov HLL Riemann Solver ļ░®ļ▓ĢņØś ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝ņÖĆ ņāüĒśĖ ļ╣äĻĄÉĒĢśņŚ¼ ņØ┤ļĪĀņĀü ĒĢ┤ļź╝ ļ░öĒāĢĒĢśņŚ¼ ļ¦īļōżņ¢┤ņ¦ä ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝Ļ░Ć ĒāĆļŗ╣ĒĢ©ņØä ĒÖĢņØĖĒĢśņśĆļŗż. ņØ┤ļź╝ ĒåĄĒĢ┤ ņŗ£ĒŚśĒāäņØś ņåŹļÅäņŚÉ ļö░ļźĖ Ļ░ĆņŖż ļ░Å ļ¼╝ ņČ®ņ¦äļ¤ēņØä Ļ│äņé░ĒĢĀ ņłś ņ׳Ļ▓ī ļÉśņŚłļŗż.
ĒĢśņ¦Ćļ¦ī, CW ļÅäĒöīļ¤¼ ļĀłņØ┤ļŗżņŚÉ ņØśĒĢ┤ Ļ│äņĖĪļÉ£ Ļ░ÉņåŹļÅäļŖö ņłśņ╣śĒĢ┤ņäØņŚÉņä£ ļÅäņČ£ļÉ£ Ļ░ÉņåŹļÅäņÖĆ ļ╣äĻĄÉĻ░Ć ņ¢┤ļĀżņøĀņ£╝ļ®░, ņØ┤ņŚÉ ļīĆĒĢ£ ņČöĻ░ĆņĀüņØĖ ņŚ░ĻĄ¼Ļ░Ć ĒĢäņÜöĒĢĀ Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ĒĢśņśĆļŗż. ņĢäņÜĖļ¤¼ ņłśņ╣śĒĢ┤ņäØņŚÉņä£ Ēö╝ņŖżĒåżņØś Ļ▒░ļÅÖņØä ļ│┤ļŗż ņĀĢļ░ĆĒĢśĻ▓ī ļ¬©ņé¼ĒĢśņŚ¼ ņŗżĒŚśĻ▓░Ļ│╝ņÖĆ ņ░©ņØ┤ļź╝ ņĄ£ņåīĒÖöĒĢ┤ņĢ╝ ĒĢĀ Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ĒĢśņśĆļŗż.




