모노펄스 레이다를 이용한 비균질 클러터 환경에서의 강건한 지면거리측정 방법
Method for Robust Ground Ranging Using Monopulse Radar in Heterogeneous Clutter Environment
Article information
Trans Abstract
Aircraft radar has special function which is ranging from aircraft to ground of antenna boresight. Because ranging information is used to calibrate altitude of aircraft or to drop a conventional bomb, the measuring have to be precise and robust. Therefore, we propose a simple and efficient method using monopulse radar for ground ranging. Proposed method calculates balancing weight according to linearity of monopulse ratio and mixes two ranging measurements in proportional to the weight. By exploiting balancing weight, radar is able to react to various environment as monopulse ratio contains characteristics of clutter environment. As a result, robust ranging information can be achieved. We use DEM(Digital Elevation Model) in order to simulate heterogeneous environment. In experimental result, it is shown that proposed method shows better accuracy and precision in any environment.
1. 서 론
레이다는 특정 방향으로 전자기파를 방사하고 다른 물체에 의해 반사되어 돌아오는 신호를 분석함으로써 물체에 대한 정보를 획득한다. 이에 일반적인 레이다는 다양한 전투체계에 통합되어 관심 표적(탱크, 공장, 전투기, 미사일 등)의 탐지 및 추적을 수행하고 표적 거리, 각도 오차 및 표적 Radar Cross Section(RCS) 등의 정보 제공 역할을 도맡는다. 하지만 항공용 레이다는 이외에도 특별한 역할을 수행하는데 레이다로부터 지면까지의 정밀한 시선거리를 측정하여 항공기에 제공하는 것이다.(Fig. 1 참조) 이를 Air-to-Ground Ranging (AGR)이라 명명하는데[1] AGR에 의해 제공된 시선거리(이하 경사거리)는 항공기의 항법 정보 수정 또는 폭탄 투하 임무 등의 역할에 사용된다. 최신 무장은 적외선 또는 레이저를 통한 유도, 데이터링크를 통한 중기 유도, 탐색기를 통한 종말 유도 등의 기능을 탑재하고 있기 때문에 폭탄 투하 임무에 정밀한 경사거리 측정이 중요하지 않겠지만 유도 기능이 없는 재래식 무장의 경우 오직 관성과 중력에 의한 탄도를 기반으로 투하하기 때문에 정확한 경사거리 측정이 반드시 선행되어야 한다.
Ground ranging of aircraft
이처럼 AGR은 항공기의 임무 수행에 중요한 역할을 수행하지만 현재 알고리즘에서는 제약사항이 존재한다. 바로 비균질 지면 환경에서의 거리측정 정확도 저하 현상이다. 이에 본 논문에서는 2장에서 AGR 알고리즘의 원리와 거리측정 정확도 저하 현상을 설명하고 3장에서는 이러한 한계를 극복하기 위한 방법을 제안한다. 그리고 4장에서는 제안 방법을 증명하기 위한 실험 환경 구성방법과 실험 결과를 제시한다.
2. 경사거리 측정 방법
본 절에서는 레이다를 이용한 경사거리 측정 방법을 설명하고 특성 및 한계점을 분석한다.
경사거리 측정에는 모노펄스 레이다[2]의 특성을 이용한다. 모노펄스 레이다는 안테나 단면을 2등분 또는 4등분 하여 단 한 번의 송신으로도 표적까지의 각도를 측정할 수 있는 레이다를 총칭한다. 모노펄스 레이다에서 빔 수신시 등분된 각 단면에서의 수신 신호 처리 방법에 따라 다른 신호가 생성되는데 모두 합하면 합채널 신호, 차를 구하면 차채널 신호, 차채널과 합채널의 비를 구한 것을 모노펄스 비라고 명명한다. 이때 빔조향 중심점의 모노펄스 비가 null이 되도록 설계 되는데 Fig. 2에서 확인 할 수 있다. 즉 레이다의 빔조향 중심점에서는 반드시 모노펄스 비가 0이 되고 수신 신호에서 모노펄스 비 MR이 0이 되는 지점(zero-crossing 점)을 찾으면 빔조향 중심 지면까지의 경사거리를 구할 수 있게 된다.
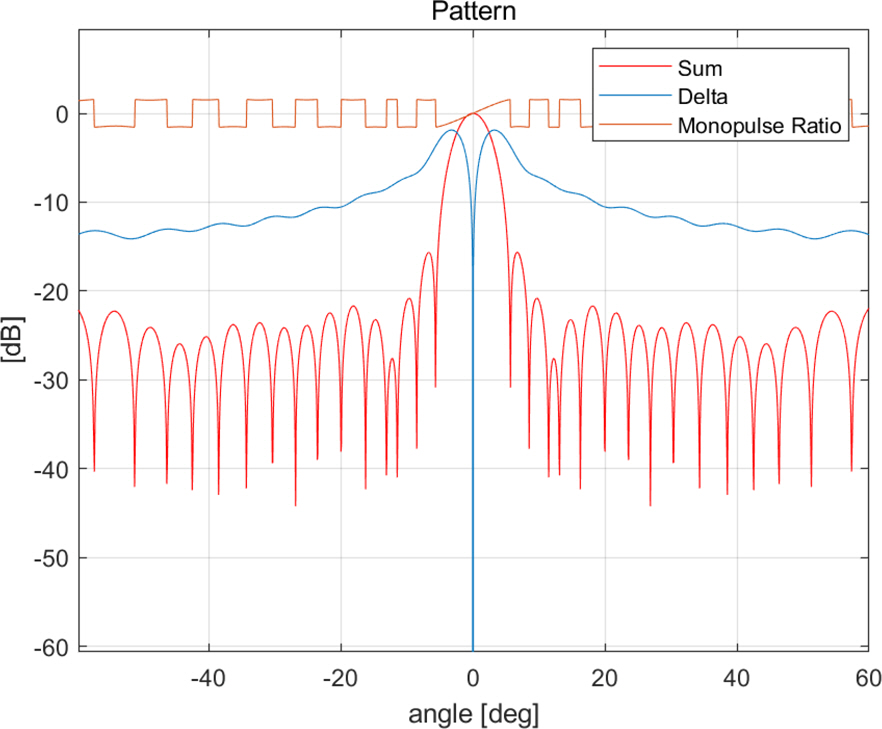
Beam pattern of monopulse radar ※ monopulse ratio is unit less
2.1. Air-to-Ground Ranging
뒤이어 나올 내용의 이해를 위해 AGR의 전체 과정을 다음과 같이 요약한다. 사용되는 변수의 설명은 Table 1을 참조한다.
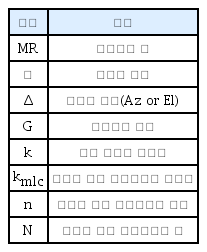
List of variables
2.1.1 주엽빔 영역 탐색
모노펄스 비는 boresight 중심으로 3 dB 빔폭 이내에서 선형성을 가지고 null-to-null 빔폭 범위까지 그러한 경향을 유지하지만(Fig. 2. 참조) 그 이외의 영역에서 수많은 zero-crossing을 형성한다. 이에 레이다 boresight 중심 근방의 신호 즉, 레이다 주엽빔 영역을 찾아야 하고 이를 위해 가드채널을 이용한다. 가드채널은 빔패턴 특성에 의해 부엽에서는 합채널 보다 신호 세기가 강하기 때문에 다음의 식을 적용하면 주엽빔 영역을 찾을 수 있다. 이때 x는 설계 파라미터로 빔 패턴에 따라 주엽빔 영역만을 선택할 수 있도록 설정한다.
2.1.2 주엽빔 영역 신호들의 모노펄스비 계산
일반적인 phase 비교 모노펄스 안테나의 모노펄스 비는 수식 (2)와 같이 계산한다[3]. phase 성분만을 얻기 위해
2.1.3. Curve fitting에 의한 zero-crossing 검출
zero-crossing 점은 환경에 따른 반사파의 fluctuation 특성에 의해 큰 편차를 가진다. 이 편차를 줄이기 위해 3차 curve fitting을 수행하는데 구하고자 하는 3차 함수는 식 (3)과 같이 표현할 수 있다.
계수 c를 구하는 과정이 curve fitting의 과정이 되며 식 (4)와 같이 수행한다.
이때 inv는 역함수를 의미하고 T는 전치행렬을 나타내며 C, K는 식 (5)와 같다.
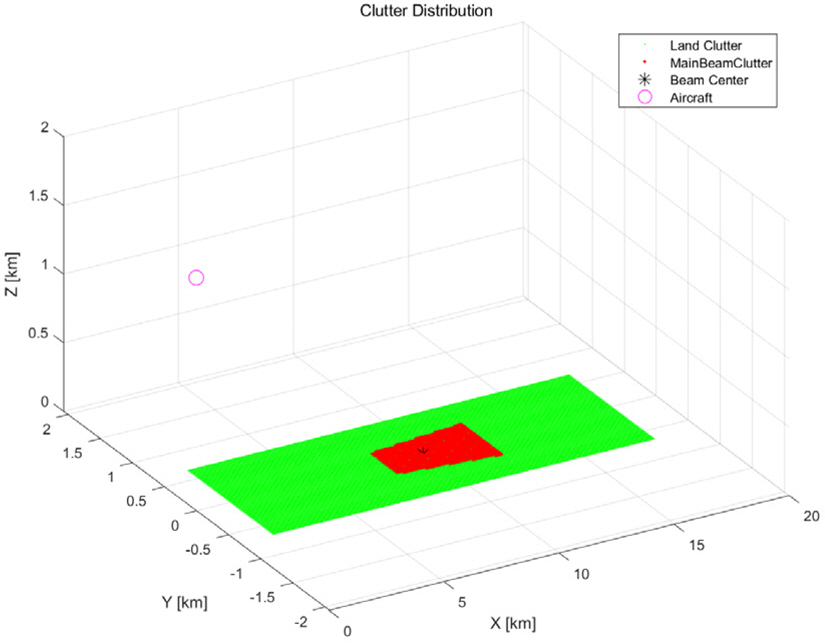
위와 같이 3차 Curve fitting을 수행하고 3차 함수 P(k)의 해를 찾으면 그 값이 레이다와 지면까지의 거리가 된다. Fig. 3은 시뮬레이션으로 모사한 균질한 지면 클러터 환경이고 Fig. 4는 이러한 환경에서 획득한 모노펄스 비와 3차 curve fitting의 결과이다. 시뮬레이션 환경은 아래의 Table 2와 같다.
Homogeneous clutter environment
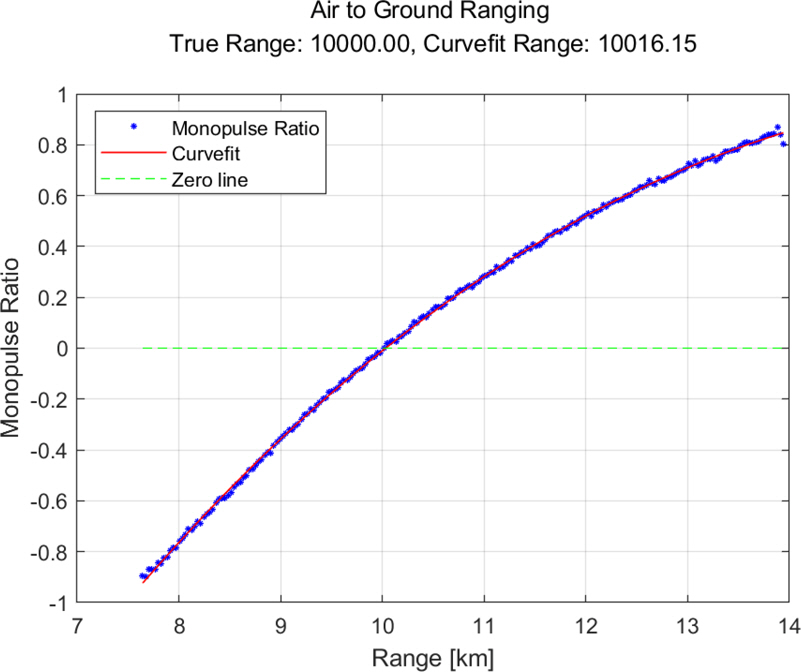
Curve fitted monopulse ratio

Simulation scenario
2.2 비균질 환경에서의 시선거리측정
AGR의 신뢰도는 모노펄스의 정확도에 의해 결정되고 모노펄스 정확도는 자항공기의 기동 또는 지면의 형태에 의해 달라진다. 자항공기 기동은 자세 보정을 통해 극복할 수 있지만[4] 지면 정보는 실시간 확보가 어렵기 때문에 쉽게 극복 할 수 없다. 그렇기 때문에 항공기 전방의 지형이 비균질 환경일 때 AGR의 신뢰도는 크게 저하하게 된다. 환경이 균질하다는 것은 전방 지형의 반사계수가 유사하고 지면의 고저차가 심하지 않음을 의미한다. 그렇기 때문에 레이다에 반사되어 돌아오는 신호는 극명한 파워 차이나 거리 왜곡에 의한 간섭 현상으로부터 자유로울 수 있다. 이와 대비되는 비균질 환경은 서로 다른 지형이 혼재하는 즉 서로 다른 반사계수가 혼재하거나 고도 편차가 커서 신호의 불연속 수신이 이루어지는 환경을 일컫는다. 이러한 비균질 환경에서는 다양한 스캐터러 신호의 간섭과 phase 왜곡 현상에 의해 모노펄스 비의 선형성이 유지되지 못하고 이로 인해 fitting에 의한 오차가 발생하게 된다.
Fig. 5에 비균질 환경에 대한 예시를 모의하여 제시하였다. 본 논문에서 지면 클러터는 −10 dB의 반사계수를 가지는 Wooded hills를 가정하였고 Digital Elevation Model(DEM)[5]의 고도 정보를 이용하여 고저차를 구현하였다. 해면 클러터는 Naval Research Laboratory의 NRL 모델[6]을 사용하여 반사계수를 계산하였고 고도는 0 m 고정하여 고저차가 존재하지 않게 하였다. RCS 계산과 같은 보다 자세한 환경 모의 방법은 4장에서 확인할 수 있다.
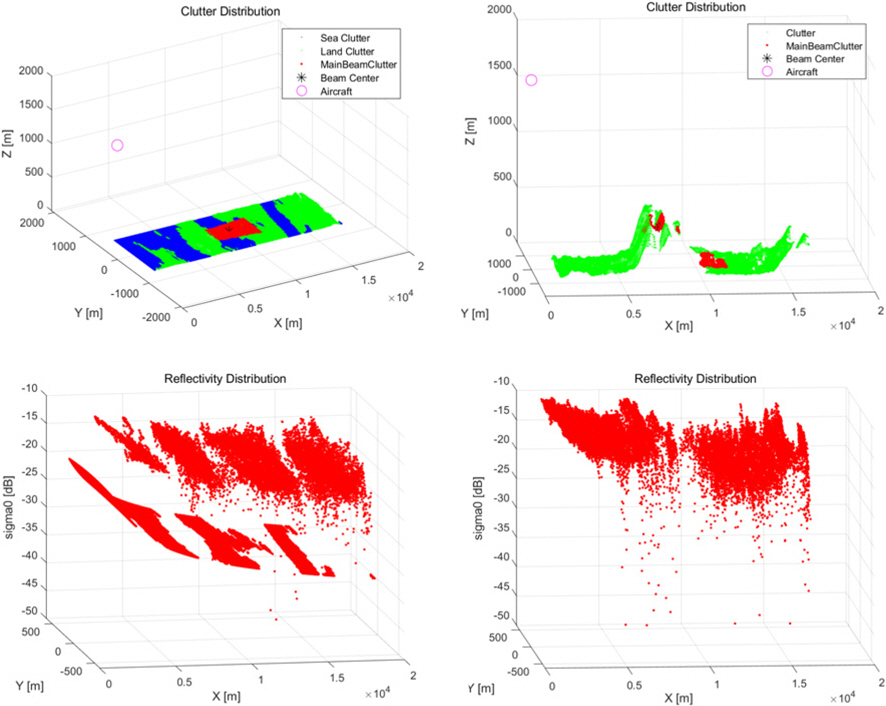
Heterogeneous clutter environment
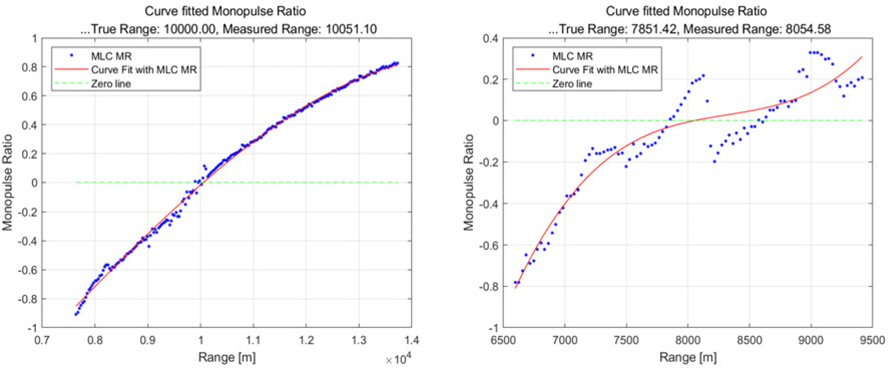
첫 번째 지형은 남해 다도해 부근으로 해면 클러터와 고도차가 존재하는 지면 클러터가 혼재해 있다. 그 결과로 클러터 간의 RCS 차이가 극명하게 되어 상대적으로 약한 해면신호가 지면 신호에 의해 묻히게 된다. 이로 인해 해면 영역 및 지면과 해면의 경계에서 모노펄스 비의 분산이 증가함을 Fig. 6 왼쪽 그래프에서 확인 할 수 있다. 두 번째 지형은 산간 지역으로 고도차가 극명하다. 이러한 고도차는 클러터 간의 RCS 격차를 만들뿐더러 수신 신호의 연속성을 깨뜨리게 된다. 균질지형이었다면 지형의 x축 거리 순서대로 신호가 반사되어 수신되겠지만 극명한 고도차에 의해 x축 거리상으로 멀리 있는 반사신호가 x축으로 더 가까운 신호와 보강상쇄간섭을 일으켜서 수신될 수 있다. 이러한 결과로 인해 모노펄스 비의 선형성은 크게 파괴되고 Fig. 6의 오른쪽 그래프와 같은 모습을 보인다.
Monopulse ratio in heterogeneous clutter environment
다음 장에서는 이렇듯 환경에 따라 요동치는 AGR 의 신뢰도를 향상시키기 위한 방법을 제시한다.
3. 제안 방법
레이다 신호는 표적(AGR의 경우 클러터)과 형성하는 반사 각 또는 여러 가지 환경 변화에 의해 fluctuation하게 되고 이를 swerling case별로 분류한다. 반사신호의 fluctuation에 의해 모노펄스 null 점 역시 흔들리게 되는데 그 결과로 경사거리측정 결과가 거리 게이트 크기만큼의 편차를 갖게 된다. 신뢰성 높은 경사거리측정을 위해 2.1.3에서 소개하였던 curve fitting 방법이 사용되는데 비균질 환경에서는 이 curve fitting 에 의해 거리측정값이 큰 오차를 갖게 된다. Fig. 6 오른쪽 그림을 보면 모노펄스 null점은 정밀하게 boresight 중심 근처(7800 m)에 형성되었지만 phase가 많이 손상됨으로 인해 curve fitting이 어긋남을 확인 할 수 있다.
이에 본 논문에서는 다양한 환경에서 신뢰성 높은 거리측정을 위해 1) 모노펄스 null과 curve fitting 결과의 융합 방법 2) 정밀한 모노펄스 null 추출 방법을 제안한다.
3.1 가중치 기반 거리 융합
모노펄스 비의 선형성에 따라 가중치를 부여해 거리를 융합하는 방법을 식 (6)과 같이 나타낸다.
이때 Rnull은 모노펄스 null점이 형성된 거리이고 Rcurve fit은 curve fitting에 의해 찾아진 거리이다. α는 curve fitting 신뢰도를 나타내는 가중치로서 0~1 사이의 값을 가진다. 수신 신호 모노펄스 비의 선형성에 따라 α값이 결정되고 두 가지 거리 측정값이 조합되어 새로운 거리 측정 결과를 도출한다. 제안 방법의 핵심 변수인 가중치 α는 식 (7), (8)과 같이 계산된다. 이때 Curve1sti와 Curve3thi는 각각 모노펄스 비의 1차, 3차 curve fitting된 값을 나타낸다.
μ는 fitting curve가 얼마나 MR 값과 유사한지를 표현하는 값이다. Fig. 7을 참조하면 데이터의 분포를 가장 큰 오차를 가지며 표현하는 선은 1차 함수 이고 고차 함수가 될수록 데이터를 정밀하게 표현하게 된다. 그렇기 때문에 식 (8)과 같이 1차 fitting 오차로 3차 fitting 오차를 나눠줌으로써 curve의 fitting 오차 분포를 정규화 시킬 수 있다.

1st & 3rd order curve fitting
tanh는 정규화된 μ값을 0~1 사이에 위치시키기 위해 필요한 활성화 함수[7]이며 식 (9)와 같이 나타낸다.
Fig. 8을 보면 0 이상의 정수에 대해 tanh를 취하면 반드시 0~1 사이의 값을 갖게 된다. μ값이 tanh함수를 거치기 때문에 0 ≤ α ≤ 1이 성립하고 비로소 α는 융합 가중치로서의 역할을 수행할 수 있게 된다.
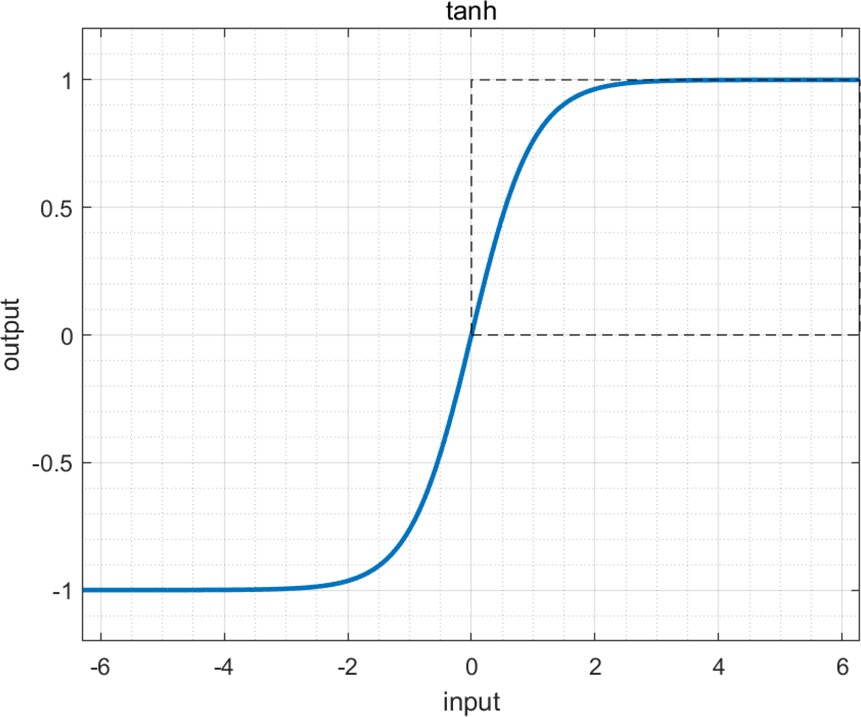
Hyperbolic tangent
c는 tanh 함수 내에서 μ의 분포 중심 위치를 결정하는 설계 파라미터이다.
직관적 이해를 돕기 위해 예시를 들어 수식을 부연 설명하면, 3차 curve fitting이 완벽하게 수행되어 Curve값이 MR 값과 유사해지면 μ값이 0에 근접하여 α→1이 된다. 그러면 식 (6)에서 보이듯 Rfusion ≃ Rcurve fit이 된다. 반대로 Curve 값이 MR 값과 크게 다르게 되면 α→0이 되고 Rfusion ≃ Rnull이 된다.
3.2 모노펄스 null 대푯값 추출
Rnull을 계산하려면 하나의 zero-crossing을 찾아야 하는데 Fig. 6과 같이 복잡한 지형에서는 zero-crossing 점이 여러 개 형성될 수도 있다. 본 논문에서는 합채널 파워를 이용한 무게중심을 계산함으로써 대푯값을 추출한다.
위 식에 따라 계산하여 아래 Fig. 9와 같이 boresight 에 가까운 zero-crossing을 찾을 수 있게 된다.
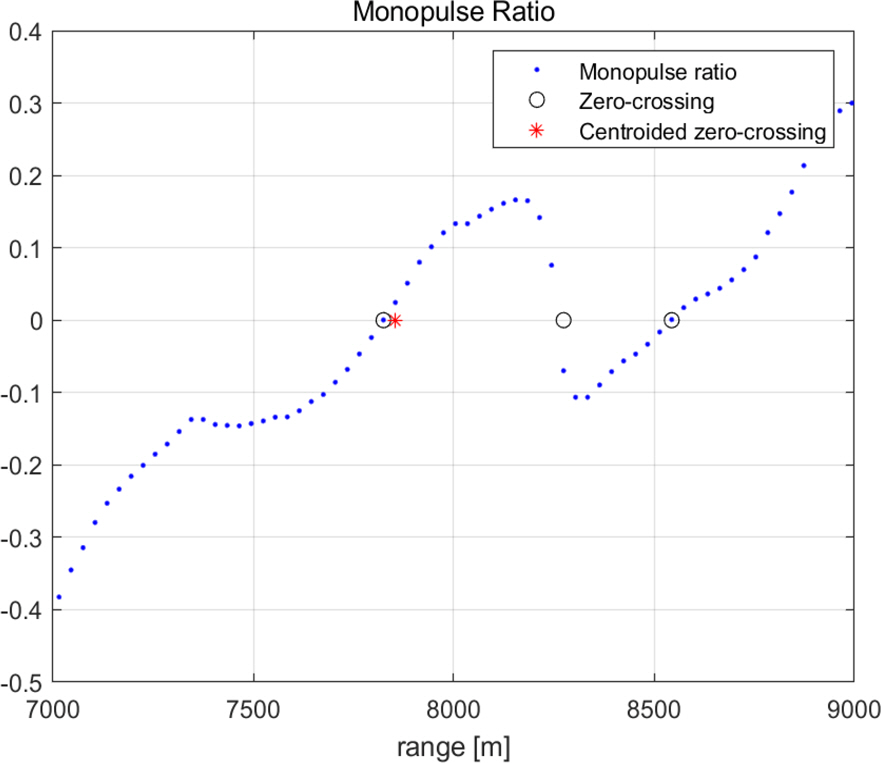
Zero-crossing extraction from monopulse ratio
본 제안방법의 장점은 수식 (6), (7), (8)과 같이 적은 추가 연산만으로 복잡한 환경에서의 강건하고 정확한 거리측정결과를 얻을 수 있음에 있다.
거리측정에 Rnull 만을 사용한다면 신호 세기 fluctuation에 의한 분산이 크기 때문에 거리측정 결과의 정밀도가 현저하게 떨어진다. 그리고 경우에 따라 여러 개의 zero-crossing이 형성 될 수 있기 때문에 모노펄스의 선형 특성을 보지 않고는 정확한 점을 찾을 수가 없다. 반면에 Rcurve fit 만을 사용한다면 상기에 언급했듯이 모노펄스 비의 선형성이 손상됐을 경우에 측정오차가 기하급수적으로 증가하게 된다. 모노펄스 비의 선형 정도를 측정하여 두 값을 융합하는 제안 알고리즘은 여러 환경에 대응할 수 있다는 점에서 가장 유연한 거리 측정 방법이라고 할 수 있다.
4. 실험 및 결과
제안방법의 검증을 위해 30 m 해상도의 Digital Elevation Model(DEM)을 활용하여 클러터 환경을 구성하였다. 반사 신호는 X band 송신 주파수를 사용하여 모의하였다. 신호를 모의할 때는 단위 클러터들의 RCS가 먼저 계산되어야 하는데 RCS(σ)는 클러터의 Reflectivity(σ0)와 클러터의 단위면적(Aclutter)의 곱으로 표현된다.
지면의 경우는 Constant Gamma 모델[8]을 사용해서 쉽게 Reflectivity를 모사할 수 있는데 수식은 식 (12)와 같다.
γ(Reflectivity Coefficient)는 지형의 반사정도를 대표하는 수치로 Table 3에서 수치를 확인할 수 있다. 본 논문에서의 지면은 Wooded hills를 가정했다. ψ는 레이다 조향빔과 지면이 이루는 경사각(Grazing Angle)이고 단위는 radian이다.
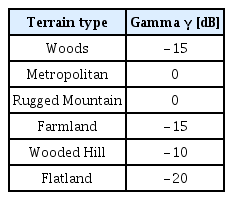
Reflectivity coefficient
해면의 경우는 보다 정밀한 모사를 위해 Naval Research Laboratory의 NRL 모델을 사용한다. 이때 X band 주파수를 기반으로 계산하였고 편파는 수직편파, Sea state[9]는 잔잔한 물결을 상정하여 level 2를 적용하였다. 조향빔과 해면이 이루는 경사각에 따라 Reflectivity는 달라지지만 평균적으로 −30 dB로 계산되어 본 논문에서 지면 Reflectivity로 상정한 −10 dB와는 20 dB 가까운 차이를 보였다.
위와 같은 환경 생성 조건 아래에서 시뮬레이션은 2절에서 설명한 균질 환경과 비균질 환경 두 개를 이용하여 총 세 개의 지형에 대해 수행하였다. 실험 결과의 신뢰도를 확보하기 위해 각 지형마다 100번씩 반복하여 거리측정을 수행하였으며 거리 오차 및 편차로 Table 4에 표기하였다. 시뮬레이션 시나리오는 참조를 위해 Table 5에 명시한다.

Simulation result [m]

Simulation scenario
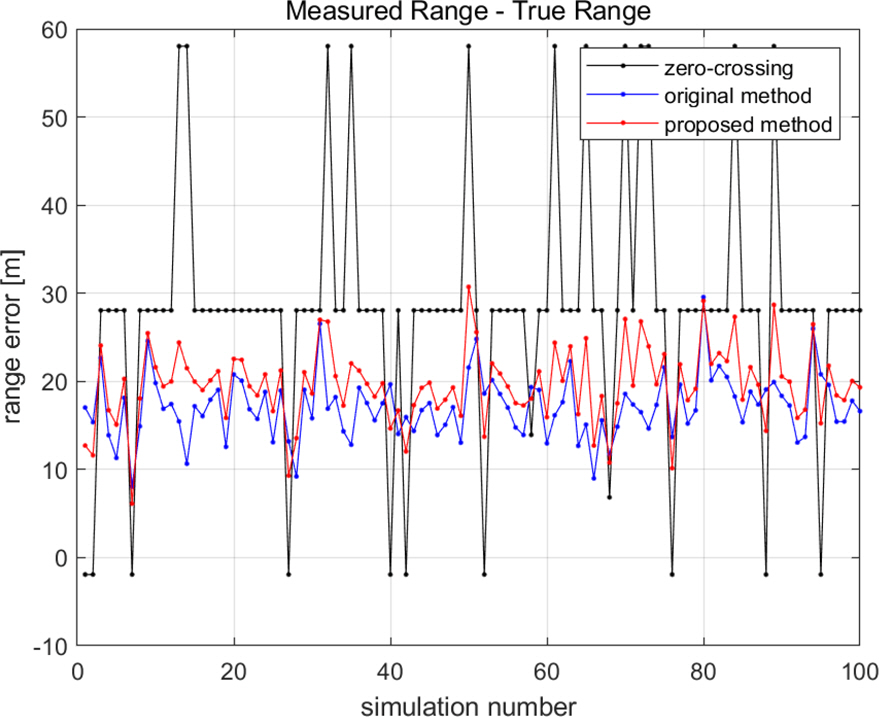
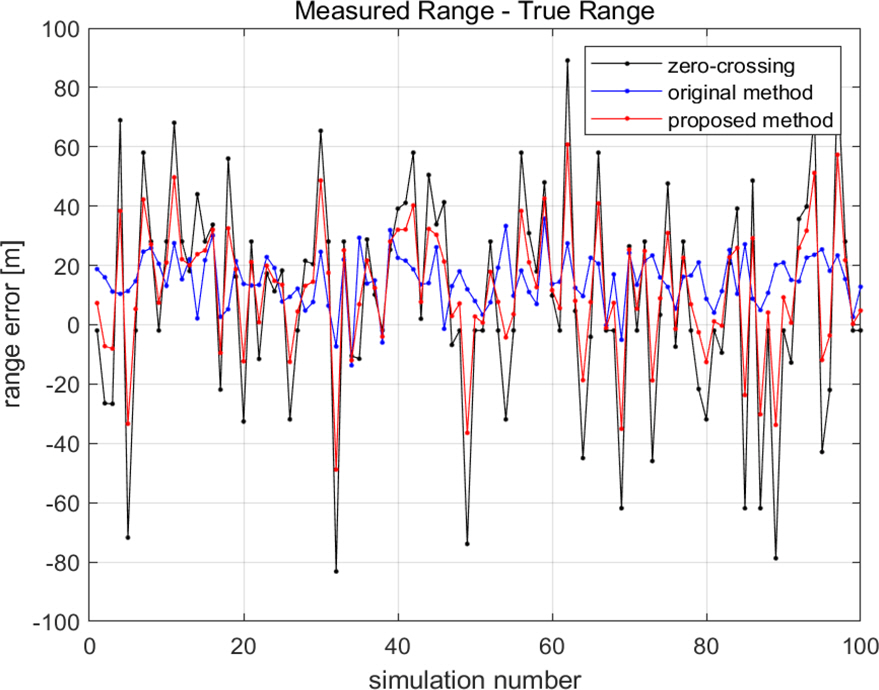
기존의 거리측정 방법인 Rcurve fit의 거리 오차 및 편차는 균질 클러터 환경 또는 비균질 정도가 적은 환경에서는 보다 나은 정확도와 정밀도를 보임을 확인할 수 있지만, 비균질 정도가 큰 환경에서는 현저하게 저하된 정확도를 보인다. 이에 반해, 제안방법 3.2를 이용해 측정한 Rnull의 거리 오차 및 편차는 클러터 환경에 큰 영향을 받지 않고 일관된 양상을 보임을 확인 할 수 있다. 다만, 1~2 거리 샘플만큼의 큰 측정 오차와 편차를 보여서 정확성 및 정밀성에서 가장 떨어지는 성능을 보이며 반사신호의 CNR(Clutter to Noise Ratio)이 낮을수록 경향은 더욱 두드러질 것으로 예상된다. 앞선 두 거리 측정 결과를 융합한 Rfusion의 거리 오차 및 편차에서는 두 방법의 결과가 잘 조화되었음을 확인할 수 있다. 균질환경에서는 Rcurve fit의 높은 정확도와 정밀도를 보여주고 비균질 환경에서는 Rcurve fit에 대한 신뢰도를 줄여 Rnull에 근사한 측정값을 보여준다. 무엇보다 가장 큰 장점은 범용성에 있다. 기존 거리 측정 방법은 균질 환경에서로 사용이 제한되고 Rnull 같이 zero-crossing만 추출하는 방식은 측정 정확도가 CNR에 크게 의존하게 된다. Rfusion은 앞선 두 가지 방식의 논리 OR 연산으로 여길 수 있기 때문에 다양한 환경에서의 강건한 거리 측정이 가능해진다. 전체 시뮬레이션 결과는 Fig. 10, 11, 12에 나타내었으며 각 제안 방법의 복잡도 참조를 위해 MATLAB 코드 기반으로 10000번에 걸쳐 반복한 알고리즘 평균 수행 시간을 Table 6에 표기하였다. 수치로 확인 할 수 있듯이 제안 알고리즘은 기존 알고리즘 대비 1 ms 이하의 추가 연산이 요구된다. 실시간 코드로 구현될 경우 체감 연산량 차이 없이 보다 강건한 거리 추정 성능을 얻을 수 있다.
Simulation result in homogeneous environment
Simulation result in heterogeneous environment 1
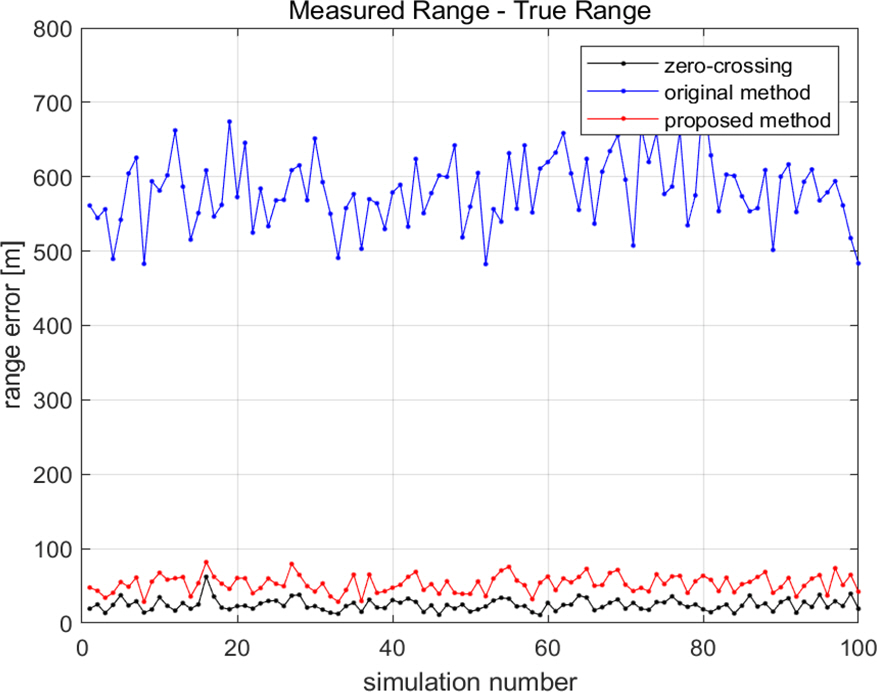
Simulation result in heterogeneous environment 2

Computation time of algorithm
5. 결 론
본 논문에서는 항공기 레이다의 필수 기능 중 하나인 경사거리측정 기능을 보다 다양한 환경에서 강건하게 수행할 수 있는 방법에 대해 제안하였다. 신호의 모노펄스 비를 이용해 두 가지 방법으로 거리를 측정하고 모노펄스 비의 선형성에 따라 가중치를 부여해 두 결과를 융합함으로써 비균질 환경에서도 신뢰도 높은 거리측정 결과를 도출하였다. 적은 연산량 만으로도 구현이 가능하며 기존에 존재하던 거리측정 방법을 정교하게 다듬을수록 제안하는 방법의 성능 또한 개선되기 때문에 시스템에 즉시 구현되어 사용 될 수 있을 것으로 예상된다.