



ĻĖ░ĒśĖņäżļ¬ģ
az: ņżæĻ░äļ░øņ╣©ļīĆ Ļ░ĆņåŹļÅä
ca, ka: Ļ┤Ćņä▒ļīÉĒŹ╝ņØś ņĀÉņä▒Ļ│äņłśņÖĆ Ļ░Ģņä▒
C1, K1: ņāüļČĆ ļ¦łņÜ┤ĒŖĖņØś ņĀÉņä▒Ļ│äņłśņÖĆ Ļ░Ģņä▒
C2, K2: ĒĢśļČĆ ļ¦łņÜ┤ĒŖĖņØś ņĀÉņä▒Ļ│äņłśņÖĆ Ļ░Ģņä▒
fa: Ļ┤Ćņä▒ļīÉĒŹ╝ ĻĄ¼ļÅÖļĀź
fe: ņāüļČĆļ░øņ╣©ļīĆņŚÉ Ļ░ĆĒĢ┤ņ¦ĆļŖö ņÖĖļČĆ ĻĖ░ņ¦äļĀź
ft: ļ▓ĀņØ┤ņŖżņŚÉ ņĀäļŗ¼ļÉśļŖö ņĀäļŗ¼ļĀź
ma: Ļ┤Ćņä▒ļīÉĒŹ╝ ņ¦łļ¤ē
M1, M2: ņāüļČĆ ļ░øņ╣©ļīĆņÖĆ ņżæĻ░ä ļ░øņ╣©ļīĆņØś ņ¦łļ¤ē
ws(k), wc(k) : Ļ░▒ņŗĀļÉ£ k-ņŖżĒģØ ĒĢäĒä░ Ļ│äņłś
xs(k), xc(k): k-ņŖżĒģØ ņāśĒöīļÉ£ ņĀĢĒśäĒīī, ņŚ¼ĒśäĒīī ņŗĀĒśĖ
ylim: ņØ┤ĒĆäļØ╝ņØ┤ņĀĆ ņĪ░ņĀĢĻ│äņłś
╬▓: ņØ┤ĒĆäļØ╝ņØ┤ņĀĆ ņĪ░ņĀĢĻ│äņłś
╬╝: FxLMS ņĢīĻ│Āļ”¼ņ”śņØś Ļ░▒ņŗĀ Ļ│äņłś
ņä£ ļĪĀ
ņ×ÉļÅÖņ░©, ĒĢŁĻ│ĄĻĖ░, ņäĀļ░Ģ ļō▒ņØś ņłśņåĪĻĖ░Ļ│äņŗ£ņŖżĒģ£ņŚÉņä£ Ēāæņ×¼ņןļ╣äņØś ļ│┤ĒśĖļź╝ ņ£äĒĢ£ ņןļ╣äņØś ņ¦äļÅÖ Ļ░ÉņćĀĻ░Ć ņżæņÜöĒĢśļ®░, ļśÉĒĢ£ Ēāæņ×¼ ņןļ╣äņŚÉņä£ ļ░£ņāØļÉśļŖö ņ¦äļÅÖ ļ░Å ņåīņØīņØ┤ ņŗ£ņŖżĒģ£ ņÖĖļČĆļĪ£ ņĀäļŗ¼ļÉśļŖö Ļ▓āņØä ņ░©ļŗ©ĒĢśļŖö Ļ▓āņØ┤ ņżæņÜöĒĢśļŗż[1]. ĒŖ╣Ē׳ ĻĄ░ņÜ®ĒĢ©ņĀĢņŚÉņä£ļŖö ņ¦äļÅÖĻ│╝ ņåīņØīņØ┤ ņÖĖļČĆļĪ£ ņĀäĒīīļÉśļ®┤ ņāØņĪ┤ņä▒ņØä ņ£äĒśæļ░øĻ▓ī ļÉ£ļŗż[2ŌĆō4]. ļö░ļØ╝ņä£ ĒĢ©ņĀĢ ņŗ£ņŖżĒģ£ņŚÉņä£ ņןļ╣äļŖö ņŗ£ņŖżĒģ£ ĻĄ¼ņĪ░ļ¼╝ņŚÉ ņ¦üņĀæ ņĪ░ļ”ĮĒĢśņ¦Ć ņĢŖĻ│Ā ļ¦łņÜ┤ĒŖĖļź╝ ĒåĄĒĢ┤ ņĪ░ļ”ĮĒĢ£ļŗż[1ŌĆō4].
ĒŖ╣Ē׳ ņĀĢņłÖ ņÜ┤ņÜ®ņØ┤ ĒĢäņłśņĀüņØĖ ņ×ĀņłśĒĢ©ņŚÉņä£ ņŚöņ¦ä ļ¦łņÜ┤ĒŖĖņŚÉ ļīĆĒĢ£ ņŚ░ĻĄ¼Ļ░Ć ļ¦ÄņØ┤ ņ¦äĒ¢ēļÉśņ¢┤ ņÖöļŗż. ļ¦łņÜ┤ĒŖĖņØś ļ░░ņ╣ś ļ░®ļ▓Ģ, ĒśĢĒā£ ļ░Å ņĀ£ņ¢┤ļ░®ļ▓Ģ ļō▒ ļŗżņ¢æĒĢ£ ņŚ░ĻĄ¼ Ļ▓░Ļ│╝Ļ░Ć ņĀ£ņŗ£ļÉśņ¢┤ ņ׳ļŗż[4]. Ļ░Ćņן ļ│┤ĒÄĖņĀüņ£╝ļĪ£ ņé¼ņÜ®ļÉśļŖö Ļ│Āļ¼┤ļ¦łņÜ┤ĒŖĖļŖö Ļ│ĀņŻ╝Ēīī ļīĆņŚŁņŚÉņä£ ņÜ░ņłśĒĢ£ ņĀäļÅÖņĀłņŚ░ ĒÜ©Ļ│╝Ļ░Ć ņ׳ņ¦Ćļ¦ī, Ļ│Ąņ¦äņŻ╝Ēīīņłś ļīĆņŚŁņŚÉņä£ļŖö ņ¦äļÅÖņĀłņŚ░ņä▒ļŖźņØś ĒĢ£Ļ│äĻ░Ć ņ׳ļŗż. ņØ┤ļ¤¼ĒĢ£ ņłśļÅÖĒśĢ ļ¦łņÜ┤ĒŖĖņØś ņä▒ļŖź Ļ░£ņäĀņØä ņ£äĒĢ┤ ņ£Āņ▓┤ņØś ļīÉĒĢæ ļ│ĆĒÖöļź╝ ņØ┤ņÜ®ĒĢśļŖö ļ░śļŖźļÅÖļ¦łņÜ┤ĒŖĖ, ņĢĢņĀäņ×æļÅÖĻĖ░ļéś ņĀäņ×ÉņäØ ĻĄ¼ļÅÖĻĖ░ļź╝ ņØ┤ņÜ®ĒĢ£ ļŖźļÅÖļ¦łņÜ┤ĒŖĖ, ņłśļÅÖļ¦łņÜ┤ĒŖĖņÖĆ ļŖźļÅÖļ¦łņÜ┤ĒŖĖļź╝ ļ│æĒ¢ē ņé¼ņÜ®ĒĢśļŖö ĒĢśņØ┤ļĖīļ”¼ļō£ ļ¦łņÜ┤ĒŖĖ ļō▒ņØ┤ ņĀ£ņŗ£ļÉśĻ│Ā ņ׳ļŗż[3ŌĆō7]. ļŖźļÅÖļ¦łņÜ┤ĒŖĖņØś ĒĢśļéśņØĖ Ļ┤Ćņä▒ļīÉĒŹ╝ļŖö ĻĖ░ņĪ┤ ņłśļÅÖļīÉĒŹ╝Ļ░Ć ņäżņ╣śļÉ£ ņןņåīņŚÉ ņČöĻ░ĆņĀüņ£╝ļĪ£ ļ│æĒ¢ēņäżņ╣śĻ░Ć ņÜ®ņØ┤ĒĢśļ®░, ņÜöĻĄ¼ļÉśļŖö ņäżņ╣ś Ļ│ĄĻ░äņØ┤ Ēü¼ņ¦Ć ņĢŖņĢä ļäÉļ”¼ ņØ┤ņÜ®ļÉśĻ│Ā ņ׳ļŗż[6ŌĆō8]. ĒŖ╣Ē׳ ņ×ĀņłśĒĢ©ņŚÉņä£ļŖö ņŚöņ¦ä ĻĖ░ņ¦äļĀźņØ┤ ļ░öļŗźņŚÉ ņĀäļŗ¼ļÉśļŖö ĒלņĀäļŗ¼ļźĀņØä ĒÜ©Ļ│╝ņĀüņ£╝ļĪ£ Ļ░Éņåīņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ ĒĢśņØ┤ļĖīļ”¼ļō£ ļ¦łņÜ┤ĒŖĖļź╝ ņé¼ņÜ®ĒĢśĻ│Ā ņ׳ļŗż[6ŌĆō8].
ĒĢśņØ┤ļĖīļ”¼ļō£ ļ¦łņÜ┤ĒŖĖņŚÉņä£ ņ¦äļÅÖņĀ£ņ¢┤ļ░®ļ▓Ģņ£╝ļĪ£ FxLMS (Filtered-x Least Mean Square) ņĢīĻ│Āļ”¼ņ”śņØä ļ¦ÄņØ┤ ņĀüņÜ®ĒĢśĻ│Ā ņ׳ļŗż[9]. ĒŖ╣Ē׳ ņŚöņ¦ä ļ¦łņÜ┤ĒŖĖņŚÉ ņĀäļŗ¼ļÉśļŖö ĻĖ░ņ¦äļĀźņØĆ ņŚöņ¦ä ĒÜīņĀäņåŹļÅäņØś ņĀĢņłśļ░░ ņŻ╝Ēīīņłśļź╝ Ļ░¢ļŖö ĒŖ╣ņ¦ĢņØ┤ ņ׳ņ£╝ļ®░, ņŚöņ¦ä ĒÜīņĀäņåŹļÅä ņĖĪņĀĢņØĆ ņÜ®ņØ┤ĒĢśļ»ĆļĪ£, Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØ┤ ĒÜ©Ļ│╝ņĀüņØ┤ļŗż[10ŌĆō12].
FxLMS ņĢīĻ│Āļ”¼ņ”śņŚÉņä£ļŖö ļ¼┤ĒĢ£ĒĢ£ Ēü¼ĻĖ░ņØś ņĀ£ņ¢┤ņ×ģļĀźņØäņĀäņĀ£ļĪ£ ĒĢśĻ│Ā ņ׳ņ£╝ļéś, ņŗżņĀ£ ņŗ£ņŖżĒģ£ņØĆ ņĀ£ņ¢┤ņ×ģļĀźņØś Ēü¼ĻĖ░ņĀ£ĒĢ£ņØ┤ ņ׳ņ£╝ļ»ĆļĪ£ ņØ┤ļź╝ Ļ│ĀļĀżĒĢ£ ņłśņĀĢļÉ£ FxLMS ņĢīĻ│Āļ”¼ņ”śņØ┤ ņĀ£ņĢłļÉśņŚłļŗż[13ŌĆō16]. ņØ┤ ņĢīĻ│Āļ”¼ņ”śļōżņØĆ ņĀ£ņ¢┤ņ×ģļĀźņØś Ēü¼ĻĖ░ ņĀ£ĒĢ£ņØä ļ¦īņĪ▒ĒĢśļÅäļĪØ ĒĢäĒä░ Ļ│äņłśņØś Ēü¼ĻĖ░ļź╝ ņĀüņØæņĀüņ£╝ļĪ£ ņĪ░ņĀĢĒĢśļŖö ļ░®ļ▓ĢņØ┤ļŗż. ĒĢśņ¦Ćļ¦ī Ļ┤Ćņä▒ļīÉĒŹ╝ņØś Ļ▓ĮņÜ░ ņĀ£ņ¢┤ņ×ģļĀź Ēü¼ĻĖ░ņØś ņĀ£ĒĢ£Ļ│╝ ņĢäņÜĖļ¤¼ ļīÉĒŹ╝ņ¦łļ¤ēņØś ņĄ£ļīĆĒŚłņÜ®ļ│Ćņ£äņĀ£ĒĢ£ņØ┤ ņ׳ļŗż. Ļ┤Ćņä▒ļīÉĒŹ╝ņŚÉņä£ ĻĄ¼ĒśäļÉśļŖö ņĀ£ņ¢┤ņ×ģļĀźņØĆ ļīÉĒŹ╝ņ¦łļ¤ēņØś Ļ┤Ćņä▒ļĀźņØ┤ļ»ĆļĪ£ ņ¦łļ¤ēņØś Ļ░ĆņåŹļÅäņŚÉ ļ╣äļĪĆĒĢśņŚ¼ Ļ│ĀņŻ╝Ēīī ņśüņŚŁņŚÉņä£ļŖö ļ│Ćņ£äĻ░Ć ņ×æņ¦Ćļ¦ī ņĀĆņŻ╝Ēīī ņśüņŚŁņŚÉņä£ļŖö Ēü░ļ│Ćņ£äĻ░Ć ņÜöĻĄ¼ļÉ£ļŗż. ļö░ļØ╝ņä£ ļīÉĒŹ╝ņ¦łļ¤ēņØś ļ│Ćņ£ä ņĀ£ĒĢ£ņØĆ ņĀ£ņ¢┤ņ×ģļĀź ņĀ£ĒĢ£Ļ│╝ļŖö ļ¼╝ļ”¼ņĀü ņ░©ņøÉņØ┤ ļŗżļźĖ ņČöĻ░ĆņĀüņØĖ ņĀ£ĒĢ£ņŚÉ ĒĢ┤ļŗ╣ĒĢ£ļŗż. ļ¦īņØ╝ ņĄ£ļīĆĒŚłņÜ®ļ│Ćņ£äļź╝ ņ┤łĻ│╝ĒĢśļŖö ņĀ£ņ¢┤ņ×ģļĀźņØ┤ Ļ░ĆĒĢ┤ņ¦Ćļ®┤ ļīÉĒŹ╝ņ¦łļ¤ēņØĆ ļīÉĒŹ╝ņØś ņĢłņĀäņØä ņ£äĒĢ┤ ņäżņ╣śĒĢśļŖö ĻĖ░ĻĄ¼ņĀü ņĀ£ĒĢ£ņןņ╣śņÖĆ ņČ®ļÅīĒĢśĻ▓ī ļÉśņ¢┤ ņåÉņāüņØ┤ ņ┤łļלļÉĀņłś ņ׳ņ£╝ļ®░, ļśÉĒĢ£ ņČ®ļÅīņŚÉ ņØśĒĢ£ ņČ®Ļ▓® ņ¦äļÅÖņØ┤ ņÖĖļČĆļĪ£ ņĀäĒīīļÉśņ¢┤ Ēö╝ĒāÉņ¦Ć Ļ░ĆļŖźņä▒ņØ┤ ļåÆņĢäņ¦äļŗż.
ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ļŖö ņØ┤ļ¤¼ĒĢ£ ļīÉĒŹ╝ņ¦łļ¤ēņØś ļ│Ćņ£ä ņĀ£ĒĢ£ņØä ļ¦īņĪ▒ĒĢśļŖö ļ▓öņ£äņŚÉņä£ ņĄ£ņĀüņØś ņĀ£ņ¢┤ņä▒ļŖźņØä ļ¦īņĪ▒ĒĢĀ ņłś ņ׳ļŖö ņłśņĀĢļÉ£ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀ£ņĢłĒĢ£ļŗż. ņØ┤ ļ░®ļ▓ĢņØĆ ļŖźļÅÖņåīņØīņĀ£ņ¢┤ņŚÉņä£ ņé¼ņÜ®ĒĢśļŖö ņØ┤ĒĆäļØ╝ņØ┤ņĀĆ[9,17] Ļ░£ļģÉņØä ĒÖĢņן ļÅäņ×ģĒĢ£ ņĢīĻ│Āļ”¼ņ”śņØ┤ļŗż.
ļ│Ėļ¼ĖņŚÉņä£ļŖö Ļ░äļŗ©ĒĢ£ ņłśļÅÖļ¦łņÜ┤ĒŖĖņØś Ļ░£ļģÉņŚÉ ļīĆĒĢ£ ņäżļ¬ģĻ│╝ Ļ┤Ćņä▒ ļīÉĒŹ╝ņØś ņäżņ╣ś ņ£äņ╣śņŚÉ ļö░ļźĖ ĒלņĀäļŗ¼ļźĀ Ļ░Éņåī ĒÜ©Ļ│╝ļź╝ ļČäņäØĒĢśļ®░, ļīÉĒŹ╝ņ¦łļ¤ēņØś ņĄ£ļīĆĒŚłņÜ®ļ│Ćņ£äļź╝ Ļ│ĀļĀżĒĢ£ ņłśņĀĢļÉ£ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀ£ņĢłĒĢśĻ│Ā, ĻĘĖ ĒāĆļŗ╣ņä▒Ļ│╝ ņä▒ļŖźņØä MatLab/Simulinkļź╝ ņØ┤ņÜ®ĒĢ£ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ĒåĄĒĢ┤ Ļ▓Ćņ”ØĒĢ£ļŗż.
ļ¦łņÜ┤ĒŖĖ
2.1 ņłśļÅÖļ¦łņÜ┤ĒŖĖ
Fig. 1ņØĆ ņØ╝ļ░śņĀüņØĖ ņłśļÅÖļ¦łņÜ┤ĒŖĖļź╝ ļ│┤ņØĖļŗż. ņāüļČĆ ņ¦łļ¤ē MņŚÉ ņÖĖļČĆĻĖ░ņ¦äļĀź fcĻ░Ć ņ×æņÜ®ĒĢśļ®░, ĒĢśļČĆņŚÉ ļīÉĒŹ╝(C)Ļ│╝ ņŖżĒöäļ¦ü(K)ļĪ£ ņØ┤ļŻ©ņ¢┤ņ¦ä ļ¦łņÜ┤ĒŖĖļź╝ ĒåĄĒĢ┤ ļ▓ĀņØ┤ņŖżņŚÉ ņŚ░Ļ▓░ļÉśņ¢┤ ņ׳ļŗż.

ņ¦łļ¤ē ļ│Ćņ£äļź╝ xļØ╝ ĒĢśļ®┤, ļ¦łņÜ┤ĒŖĖļź╝ ĒåĄĒĢ┤ ļ▓ĀņØ┤ņŖżņŚÉ ņĀäļŗ¼ļÉśļŖö ņĀäļŗ¼ļĀź(ft)Ļ│╝ ņÖĖļČĆĻĖ░ņ¦äļĀź(fe)ņØś ļ╣äņØĖ ĒלņĀäļŗ¼ļźĀ(force transmissibility)ņØä ļØ╝ĒöäļØ╝ņŖż ĒÅēļ®┤ņŚÉņä£ ļéśĒāĆļé┤ļ®┤
ņŚ¼ĻĖ░ņä£ ╬ČļŖö Ļ░ÉņćĀļ╣ä, ŽēnļŖö Ļ│Āņ£Āņ¦äļÅÖņłśņØ┤ļŗż.
ņŗØ (1)ņØś ĒלņĀäļŗ¼ļźĀņØś Ēü¼ĻĖ░ļź╝ ņŻ╝Ēīīņłś ĒÅēļ®┤ņŚÉņä£ ļéśĒāĆļé┤ļ®┤ Fig. 2ņÖĆ Ļ░ÖņØ┤ Ļ│Āņ£Āņ¦äļÅÖņłś 2

2.2 ļŖźļÅÖļ¦łņÜ┤ĒŖĖ
Fig. 1, 2ņÖĆ Ļ░ÖņØĆ ņłśļÅÖĒśĢ ļ¦łņÜ┤ĒŖĖņØś ĒŖ╣ņä▒ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņ¦äļÅÖ ņĀäļŗ¼ņØä Ļ░ÉņćĀņŗ£Ēé¼ ņłś ņ׳ņ£╝ļéś, Ļ│Ąņ¦äņŻ╝Ēīīņłś ņśüņŚŁņŚÉņä£ļŖö ņä▒ļŖźņØś ĒĢ£Ļ│äĻ░Ć ņ׳ļŗż. ĒŖ╣Ē׳ Ēāæņ×¼ĒĢ£ ņןļ╣äĻ░Ć ĒÜīņĀäĻĖ░ĻĖ░ņÖĆ Ļ░ÖņØ┤ ņ×Éņ▓┤ ĻĖ░ņ¦äļĀźņØä ļ░£ņāØņŗ£ĒéżļŖö Ļ▓ĮņÜ░ ņłśļÅÖĒśĢ ļ¦łņÜ┤ĒŖĖļĪ£ļŖö ņČ®ļČäĒĢ£ ņ¦äļÅÖņĀłņŚ░ņä▒ļŖźņØä ĻĖ░ļīĆĒĢśĻĖ░ ņ¢┤ļĀĄļŗż. ņØ┤ļź╝ ņ£äĒĢ┤ ļ░śļŖźļÅÖĒśĢ ļ¦łņÜ┤ĒŖĖ, ļŖźļÅÖĒśĢ ļ¦łņÜ┤ĒŖĖ, ņłśļÅÖļ¦łņÜ┤ĒŖĖņÖĆ ļŖźļÅÖĒśĢ ļ¦łņÜ┤ĒŖĖļź╝ Ēś╝ņÜ®ĒĢśļŖö ĒĢśņØ┤ļĖīļ”¼ļō£ ļ¦łņÜ┤ĒŖĖ ļō▒ ļŗżņ¢æĒĢ£ ļ¦łņÜ┤ĒŖĖĻ░Ć ņé¼ņÜ®ļÉ£ļŗż. ļŖźļÅÖĒśĢ ļ¦łņÜ┤ĒŖĖļŖö ņĀæņ┤ēĒśĢĻ│╝ ļ╣äņĀæņ┤ēĒśĢņ£╝ļĪ£ ļéśļłī ņłś ņ׳ņ£╝ļ®░, ļ¦łņÜ┤ĒŖĖņØś Ēü¼ĻĖ░, ļÅÖļĀźļ░Å ĒÜ©ņ£©ņä▒ ņĖĪļ®┤ņŚÉņä£ ļ╣äņĀæņ┤ēĒśĢ Ļ┤Ćņä▒ĒśĢ ļ¦łņÜ┤ĒŖĖĻ░Ć ņĄ£ĻĘ╝Ļ┤Ćņŗ¼ņØä ļ░øĻ│Ā ņ׳ļŗż[3-8].
Fig. 3ņØĆ Ļ┤Ćņä▒ļīÉĒŹ╝ņØś ņśłļĪ£ ņŖżĒöäļ¦üņ£╝ļĪ£ ņ¦Ćņ¦ĆļÉ£ ņżæĻ░äņØś ņ¦łļ¤ēņØĆ ņĖĪļ®┤ņØś ņĀäņ×ÉņäØņŚÉ ņØśĒĢ┤ ņāüĒĢś ņØ┤ļÅÖĒĢśĻ▓ī ļÉśļ®░, ĻĘĖ ļ░śļĀźņØĖ Ļ┤Ćņä▒ļĀźņØ┤ ļīÉĒŹ╝ ņäżņ╣śļ®┤ņŚÉ ņĀäļŗ¼ļÉ£ļŗż. Ļ┤Ćņä▒ļīÉĒŹ╝ļŖö ņĀæņ┤ēĒśĢ ņĢĪĒŖ£ņŚÉņØ┤Ēä░Ļ░Ć Ļ░¢ļŖö ļ¦łņÜ┤ĒŖĖ ņāüļČĆņÖĆ ĒĢśļČĆņŚÉ ņ×æņÜ®ļĀźĻ│╝ ļ░śļĀźņØä ļÅÖņŗ£ņŚÉ Ļ░ĆĒĢśļŖö ĒŖ╣ņ¦ĢņØä Ēö╝ĒĢĀ ņłś ņ׳ņ¢┤ ņ£Āļ”¼ĒĢśļŗż.
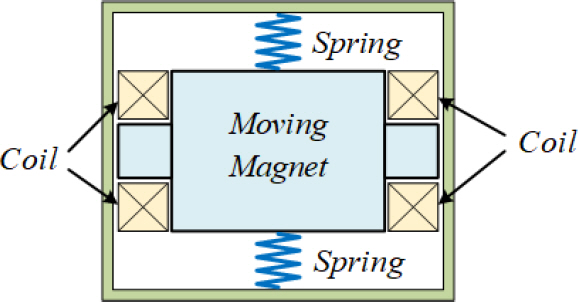
Fig. 4ļŖö ņØ╝ļ░śņĀüņØĖ 2-ļŗ©ņØś ņłśļÅÖĒśĢ ļ¦łņÜ┤ĒŖĖļź╝ ļ│┤ņØĖļŗż. ņāüļČĆļ░øņ╣©ļīĆ(M1)ņŚÉ ņןļ╣äĻ░Ć Ēāæņ×¼ļÉśļ®░, ĒĢśļČĆņØś ņłśļÅÖĒśĢ ļ¦łņÜ┤ĒŖĖļź╝ ĒåĄĒĢ┤ ņżæĻ░äļ░øņ╣©ļīĆ(M2)ņŚÉ ņŚ░Ļ▓░ļÉśĻ│Ā, ņżæĻ░äļ░øņ╣©ļīĆ ĒĢśļČĆņØś ņłśļÅÖĒśĢ ļ¦łņÜ┤ĒŖĖļź╝ ĒåĄĒĢ┤ ļ▓ĀņØ┤ņŖżņŚÉ ņŚ░Ļ▓░ļÉ£ļŗż. Ļ┤Ćņä▒ļīÉĒŹ╝ļŖö ņāüļČĆļ░øņ╣©ļīĆ ļśÉļŖö ņżæĻ░äļ░øņ╣©ļīĆņŚÉ ņäżņ╣śĒĢĀ ņłś ņ׳ļŗż. feļŖö ņÖĖļČĆĻĖ░ņ¦äļĀź, xņÖĆ zļŖö ņāüļČĆļ░øņ╣©ļīĆņÖĆ ņżæĻ░äļ░øņ╣©ļīĆņØś ļ│Ćņ£ä, C1, K1ņÖĆ C2, K2ļŖö Ļ░üĻ░ü ņāüļČĆņÖĆ ĒĢśļČĆ ļ¦łņÜ┤ĒŖĖņØś ņĀÉņä▒Ļ│äņłśņÖĆ Ļ░Ģņä▒ņØ┤ļŗż. Fa, FbļŖö Ļ┤Ćņä▒ ļīÉĒŹ╝ņØś Ļ┤Ćņä▒ļĀźņ£╝ļĪ£, FaļŖö Ļ┤Ćņä▒ļīÉĒŹ╝Ļ░Ć ņāüļČĆ ļ░øņ╣©ļīĆņŚÉ ņäżņ╣śļÉ£ Ļ▓ĮņÜ░ ņāüļČĆļ░øņ╣©ļīĆņŚÉ ņĀäļŗ¼ļÉśļŖö Ēל, FbļŖö Ļ┤Ćņä▒ļīÉĒŹ╝Ļ░Ć ņżæĻ░äļ░øņ╣©ļīĆņŚÉ ņäżņ╣śļÉ£ Ļ▓ĮņÜ░ ņżæĻ░äļ░øņ╣©ļīĆņŚÉ ņĀäļŗ¼ļÉśļŖö ĒלņØä ļéśĒāĆļéĖļŗż. FtļŖö ļ▓ĀņØ┤ņŖżņŚÉ ņĀäļŗ¼ļÉśļŖö ĒלņØ┤ļŗż. ņØ┤ ļ¦łņÜ┤ĒŖĖļŖö ņÖĖļČĆ ĻĖ░ņ¦äļĀź feĻ░Ć ļ▓ĀņØ┤ņŖżņŚÉ ņĀäļŗ¼ļÉśļŖö ĒלņĀäļŗ¼ļźĀņØä Ļ░Éņåīņŗ£ĒéżļŖöļŹ░ ļ¬®ņĀüņØ┤ ņ׳ņ£╝ļ»ĆļĪ£ FtņŚÉ ņżæņĀÉņØä ļæÉĻ│Ā ņ¢┤ļŖÉ ņ£äņ╣śņŚÉ ņäżņ╣śĒĢśļŖö Ļ▓āņØ┤ ņ£Āļ”¼ĒĢ£ņ¦Ć ļ╣äĻĄÉļČäņäØĒĢ£ļŗż.

Fig. 4ņØś ņÜ┤ļÅÖļ░®ņĀĢņŗØņØĆ ļŗżņØīĻ│╝ Ļ░Öļŗż.
ņŗØ (2)ņŚÉņä£ ĒלņĀäļŗ¼ļźĀņØĆ ņŗØ (3)Ļ│╝ Ļ░Öļŗż.
ņŚ¼ĻĖ░ņä£ w 1 ŌĆē = ŌĆē k 1 / M 1 , ŌĆē ╬Č 1 ŌĆē = C 1 / 2 ŌĆē k 1 / M 1 ,
ņŗØ (3)ņŚÉņä£ņÖĆ Ļ░ÖņØ┤ ļīĆņ▓┤ņĀüņ£╝ļĪ£ ņÖĖļČĆĻĖ░ņ¦äļĀźņØĆ ņāüļČĆņØś ļ¦łņÜ┤ĒŖĖņŚÉ ņØśĒĢ┤ 1ņ░©ņĀüņ£╝ļĪ£ ņĀäļŗ¼ļĀź Ļ░ÉņćĀĻ░Ć ņØ╝ņ¢┤ļéśļ®░, ļŗżņŗ£ ĒĢśļČĆņØś ļ¦łņÜ┤ĒŖĖņŚÉ ņØśĒĢ┤ 2ņ░©ņĀüņØĖ Ļ░ÉņćĀĻ░Ć ļ░£ņāØĒĢ£ļŗż. ļŗ© Fig. 2ņŚÉņä£ņÖĆ Ļ░ÖņØ┤ 2ļ▓łņ¦Ė Ļ│Āņ£Āņ¦äļÅÖņłś ļČĆĻĘ╝ ņØ┤ĒĢśņØś ņŻ╝Ēīīņłś ļīĆņŚŁņŚÉņä£ļŖö Ēל ņĀäļŗ¼ļźĀņØ┤ 1ļ│┤ļŗż ņ╗żņä£ ņ”ØĒÅŁļÉĀ ņłś ņ׳ļŗż.
Ļ┤Ćņä▒ļīÉĒŹ╝ļź╝ ņāüļČĆ ļ░øņ╣©ļīĆ ļśÉļŖö ņżæĻ░ä ļ░øņ╣©ļīĆņŚÉ ņäżņ╣śĒĢĀ Ļ▓ĮņÜ░ ĒÜ©ņ£©ņä▒ ņ░©ņØ┤ļź╝ ļČäņäØĒĢśĻĖ░ļĪ£ ĒĢ£ļŗż. ļČäņäØņØä ņ£äĒĢ┤ ņÜ░ņäĀ ļ¬©ļōĀ ņŻ╝ĒīīņłśņŚÉņä£ ņŖżĒÄÖĒŖĖļ¤╝ņØś Ēü¼ĻĖ░Ļ░Ć ļÅÖņØ╝ĒĢ£ ņÖĖļČĆĻĖ░ņ¦äļĀźņØ┤ ņ×æņÜ®ĒĢĀ ļĢī ļ▓ĀņØ┤ņŖżņŚÉ ņĀäļŗ¼ļÉśļŖö ĒלņĀäļŗ¼ļźĀņØä ņłśļÅÖļ¦łņÜ┤ĒŖĖļź╝ ņé¼ņÜ®ĒĢĀ ļĢīņØś ╬▒(<1)ļ░░(ļ¬©ļōĀ ņŻ╝Ēīīņłś ļ▓öņ£äņŚÉņä£)ļĪ£ Ļ░Éņåīņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ ĒĢäņÜöĒĢ£ Ļ░üĻ░üņØś Ēל FaņÖĆ Fbļź╝ ļ╣äĻĄÉĒĢ£ļŗż.
ņÜ░ņäĀ ņāüļČĆ ļ░øņ╣©ļīĆņŚÉ Ļ┤Ćņä▒ļīÉĒŹ╝ļź╝ ņäżņ╣śĒĢĀ Ļ▓ĮņÜ░(Fb = 0) ņøÉĒĢśļŖö ĒלņĀäļŗ¼ļźĀņØä ļ¦īņĪ▒ĒĢśĻĖ░ ņ£äĒĢ£ Ļ┤Ćņä▒ļĀź FaļŖö ļŗżņØīņØä ļ¦īņĪ▒ĒĢ┤ņĢ╝ ļÉ£ļŗż.
ņżæĻ░äļ░øņ╣©ļīĆņŚÉ Ļ┤Ćņä▒ļīÉĒŹ╝ļź╝ ņäżņ╣śĒĢĀ Ļ▓ĮņÜ░(Fa = 0) ņøÉĒĢśļŖö ĒלņĀäļŗ¼ļźĀņØä ļ¦īņĪ▒ĒĢśĻĖ░ ņ£äĒĢ£ Ļ┤Ćņä▒ļĀź FbļŖö ļŗżņØīņØä ļ¦īņĪ▒ĒĢ┤ņĢ╝ ļÉ£ļŗż.
ņŗØ (4)ņÖĆ (5)ņŚÉņä£ ļÅÖņØ╝ĒĢ£ ĒלņĀäļŗ¼ļźĀ Ļ░ÉņćĀļź╝ ĻĄ¼ĒśäĒĢśĻĖ░ ņ£äĒĢ£ FaņÖĆ FbņØś Ļ┤ĆĻ│äļŖö
ņŗØ (6)ņØś ņŻ╝ĒīīņłśņØæļŗĄĒĢ©ņłśļŖö Fig. 2ņÖĆ ļÅÖņØ╝ĒĢśļŗż. ļö░ļØ╝ņä£ ņ▓½ ļ▓łņ¦Ė Ļ│Āņ£Āņ¦äļÅÖņłś ņØ┤ņāüņØś ņŻ╝Ēīīņłś ņśüņŚŁņŚÉņä£ ņżæĻ░äļ░øņ╣©ļīĆņŚÉ ņäżņ╣śĒĢśļŖö Ļ▓ĮņÜ░Ļ░Ć ļŹö ĒÜ©Ļ│╝ņĀüņ×äņØä ņĢī ņłś ņ׳ļŗż. ņ”ē, ņżæļŗ© ļ░øņ╣©ļīĆņŚÉ ņäżņ╣śĒĢĀ ļĢī ļŹö ņ×æņØĆ Ēלņ£╝ļĪ£ ņøÉĒĢśļŖö ĒלņĀäļŗ¼ļźĀņØä ĻĄ¼ĒśäĒĢĀ ņłś ņ׳ņ£╝ļ®░, ĒŖ╣Ē׳ ņŻ╝ĒīīņłśĻ░Ć ņ”ØĻ░ĆĒĢĀņłśļĪØ ļŹö ņ×æņØĆ ĒלņØ┤ ĒĢäņÜöĒĢ©ņØä ņĢī ņłś ņ׳ļŗż. ļö░ļØ╝ņä£ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņżæĻ░ä ļ░øņ╣©ļīĆņŚÉ Ļ┤Ćņä▒ļīÉĒŹ╝ļź╝ ņäżņ╣śĒĢśļŖö Ļ▓ĮņÜ░ļź╝ ļīĆņāüņ£╝ļĪ£ ĒĢ£ļŗż.
Ļ┤Ćņä▒ļīÉĒŹ╝ņØś FxLMS ņĢīĻ│Āļ”¼ņ”ś ĻĖ░ļ░ś ņĀ£ņ¢┤
ņĢ×ņØś ļģ╝ņØśļź╝ ļ░öĒāĢņ£╝ļĪ£ Fig. 5ņÖĆ Ļ░ÖņØ┤ ņżæĻ░äļ░øņ╣©ļīĆņŚÉ Ļ┤Ćņä▒ļīÉĒŹ╝ļź╝ ņäżņ╣śĒĢ£ ņŗ£ņŖżĒģ£ņØś ņĀ£ņ¢┤ļź╝ Ļ│ĀļĀżĒĢ£ļŗż. Ļ┤Ćņä▒ļīÉĒŹ╝ļŖö ņĀäņ×ÉĻĖ░ļĀźņŚÉ ņØśĒĢ┤ ļ░£ņāØļÉ£ ĒלņØ┤ Ļ┤Ćņä▒ļīÉĒŹ╝ņØś ņ¦łļ¤ēņŚÉ ņĀäļŗ¼ļÉśļ®░, ļ░śļīĆļ░®Ē¢źņØś Ļ┤Ćņä▒ļĀźņØ┤ ņżæĻ░äļ░øņ╣©ļīĆņŚÉ ņ×æņÜ®ĒĢ£ļŗż. ņāüļČĆļ░øņ╣©ļīĆņŚÉļŖö ņŚöņ¦äĻ│╝ Ļ░ÖņØĆ ĒÜīņĀäĻĖ░ĻĖ░Ļ░Ć ņäżņ╣ś ņÜ┤ņÜ®ļÉśļ®░, ļö░ļØ╝ņä£ ņŚöņ¦äņØ┤ ļÅÖņ×æĒĢśļ®┤ ņŚöņ¦äņØś ĒÜīņĀä ņåŹļÅäņŚÉ ļö░ļØ╝ ņŻ╝ĒīīņłśĻ░Ć Ļ░Ćļ│ĆĒĢśļŖö ņĀĢĒśäĒīī ĒśĢĒā£ņØś ĻĖ░ņ¦äļĀźņØ┤ ņ×æņÜ®ĒĢśĻ▓ī ļÉ£ļŗż. Ļ┤Ćņä▒ļīÉĒŹ╝ļŖö ņ¦äļÅÖņØś ļ▓ĀņØ┤ņŖż ņĀäļŗ¼ņØä ņ░©ļŗ©ĒĢśĻĖ░ ņ£äĒĢ┤ ņżæĻ░äļ░øņ╣©ļīĆņØś ņāüĒĢś Ļ░ĆņåŹļÅäļź╝ Ļ░Éņåīņŗ£ĒéżļŖöļŹ░ ļ¬®ņĀüņØä ļæöļŗż.
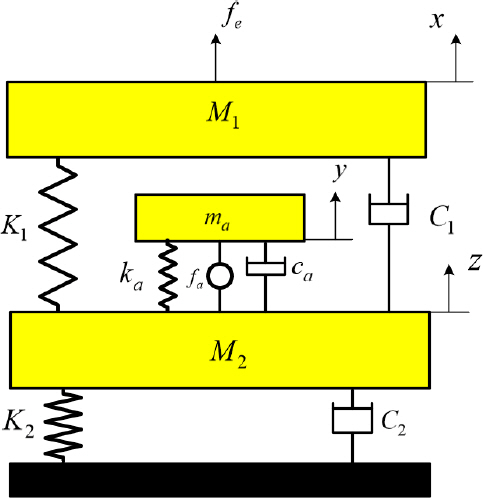
Fig. 5 ņ¦äļÅÖņŗ£ņŖżĒģ£ņØś ņÜ┤ļÅÖļ░®ņĀĢņŗØņØĆ ļŗżņØīĻ│╝ Ļ░Öļŗż.
ņŚ¼ĻĖ░ņä£ M1, ma, M2ļŖö Ļ░üĻ░ü ņāüļČĆļ░øņ╣©ļīĆ, Ļ┤Ćņä▒ļīÉĒŹ╝, ņżæĻ░äļ░øņ╣©ļīĆņØś ņ¦łļ¤ē, x,y,zļŖö Ļ░üĻ░ü ņ¦łļ¤ēņØś ņāüĒĢśļ│Ćņ£ä, C1, K1Ļ│╝ C2, K2ļŖö Ļ░üĻ░ü ņāüļČĆņÖĆ ĒĢśļČĆļ¦łņÜ┤ĒŖĖņØś ļīÉĒĢæĻ│äņłśņÖĆ Ļ░Ģņä▒ņØ┤ļŗż. feļŖö ņÖĖļČĆĻĖ░ņ¦äļĀź, faļŖö Ļ┤Ćņä▒ļīÉĒŹ╝ ĻĄ¼ļÅÖļĀźņ£╝ļĪ£ ņĀ£ņ¢┤ņ×ģļĀźņØ┤ļŗż.
ņŗØ (7)ņØä ņĀĢļ”¼ĒĢśņŚ¼ ņżæĻ░äļ░øņ╣©ļīĆņØś Ļ░ĆņåŹļÅäņØś ļØ╝ĒöīļØ╝ņŖż ļ│ĆĒÖś Az(s)ļź╝ ĻĄ¼ĒĢśļ®┤
ņŚ¼ĻĖ░ņä£
ņØ┤ļ®░, ŌäÆ[g(t)]ļŖö ĒĢ©ņłś g(t)ņØś ļØ╝ĒöīļØ╝ņŖżļ│ĆĒÖśņØ┤ļŗż.
ņŗØ (8)ņŚÉņä£ Ļ┤Ćņä▒ļīÉĒŹ╝ņØś Ļ┤Ćņä▒ļĀźņØä ņŗØ (9)ņÖĆ Ļ░ÖņØ┤ ļ░£ņāØņŗ£ Ēéżļ®┤ ņżæĻ░äļ░øņ╣©ļīĆņØś Ļ░ĆņåŹļÅäļź╝ ņÖäļ▓ĮĒĢśĻ▓ī ņśüņ£╝ļĪ£ ĒĢĀ ņłś ņ׳ņ£╝ļéś,
ņŗØ (9)ņŚÉņä£ņÖĆ Ļ░ÖņØ┤ ņĀäļŗ¼ĒĢ©ņłśļŖö ņøÉņĀÉņŚÉ ļæÉ Ļ░£ņØś ĻĘ╣ņĀÉņØ┤ ņĪ┤ņ×¼ĒĢśļ»ĆļĪ£ ļČłņĢłņĀĢĒĢśļ»ĆļĪ£ ņĀüņÜ®ĒĢĀ ņłś ņŚåļŗż.
ņĢ×ņØś ļ¼ĖņĀ£ņØś ņĀĢņØśņŚÉņä£ ņÖĖļČĆĻĖ░ņ¦äļĀźņØĆ Ēāæņ×¼ņןļ╣ä ĒÜīņĀäņåŹļÅäņŚÉ ĒĢ┤ļŗ╣ļÉśļŖö ņŻ╝Ēīīņłśļź╝ Ļ░¢ļŖö ņĀĢĒśäĒīī ĒŖ╣ņä▒ņØä Ļ░¢Ļ▓ī ļÉśļ»ĆļĪ£, ĒÜīņĀäņåŹļÅäļź╝ ņĖĪņĀĢĒĢśņŚ¼ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢśĻĖ░ ņĀüņĀłĒĢ£ ļīĆņāüņØ┤ļŗż.
ņŗØ (8)ņØä ņØ┤ņé░ĒÖöĒĢśļ®┤ ņŗØ (10)ņ£╝ļĪ£ ļéśĒāĆļé╝ ņłś ņ׳ļŗż.
ņŚ¼ĻĖ░ņä£
ņØ┤ļ®░, Z[G(s)]ļŖö ĒĢ©ņłś G(s)ņØś z-ļ│ĆĒÖśņØä ļéśĒāĆļéĖļŗż.
3.1 Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”ś
ņŗØ (10)ņŚÉ ĻĘ╝Ļ▒░ĒĢśņŚ¼ ņżæĻ░äļ░øņ╣©ļīĆņØś Ļ░ĆņåŹļÅäļź╝ ņĄ£ņåīĒÖöĒĢśĻĖ░ ņ£äĒĢ┤ Fig. 6Ļ│╝ Ļ░ÖņØ┤ Ēāæņ×¼ ņןļ╣äņØś ĒÜīņĀäņåŹļÅäļź╝ ņĖĪņĀĢĒĢśņŚ¼ ņ¢╗ņØĆ ĻĖ░ņ¦äļĀźņØś ņŻ╝Ēīīņłś Žē0ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢ£ļŗż.
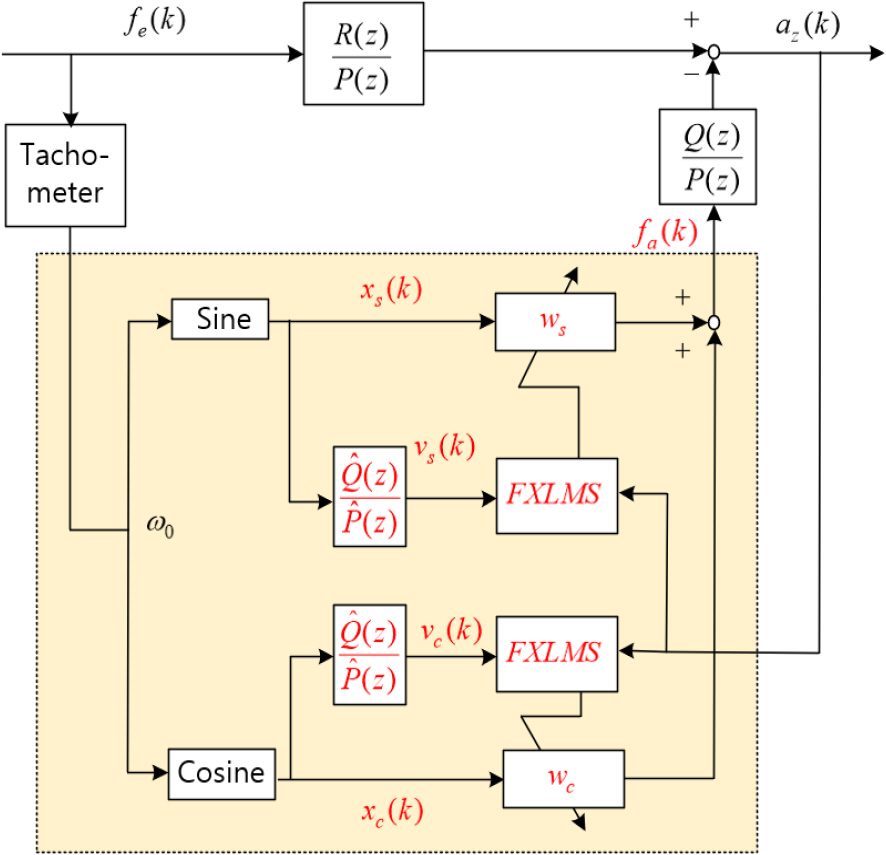
ņÖĖļČĆĻĖ░ņ¦äļĀźņØś ņŻ╝Ēīīņłś Žē0ļŖö ņןļ╣äņŚÉ ņäżņ╣śļÉ£ ĒāĆņĮöļ»ĖĒä░ļź╝ ĒåĄĒĢ┤ ņĖĪņĀĢ Ļ░ĆļŖźĒĢ£ Ļ▓āņ£╝ļĪ£ Ļ░ĆņĀĢĒĢśņśĆņ£╝ļ®░, ņŻ╝Ēīīņłś Žē0ļź╝ Ļ░¢ļŖö ņĀĢĒśäĒīī ņŗĀĒśĖ xs(k)ņÖĆ ņŚ¼ĒśäĒīī ņŗĀĒśĖ xc(k)ļź╝ ļ░£ņāØņŗ£Ēé©ļŗż. ņŗØ (10) ļśÉļŖö Fig. 6ņŚÉņä£ ņĀäļŗ¼ĒĢ©ņłś Q(z)/P(z)ļŖö ļŖźļÅÖņåīņØīņĀ£ņ¢┤ņŚÉņä£ ņĀĢņØśĒĢśļŖö 2ņ░© Ļ▓ĮļĪ£ ņĀäļŗ¼ĒĢ©ņłś(secondary path transfer function)ļź╝ ļéśĒāĆļé┤ļ®░, ņĀĢĒśäĒīīņÖĆ ņŚ¼ĒśäĒīī ņŗĀĒśĖļź╝ ņČöņĀĢļÉ£ 2ņ░© Ļ▓ĮļĪ£ ņĀäļŗ¼ĒĢ©ņłśļź╝ ĒåĄĻ│╝ņŗ£ņ╝£ ņ¢╗ņØĆ ņŗĀĒśĖ vs(k), vc(k)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ļŗżņØīņØś FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ĒåĄĒĢ┤ ĒĢäĒä░Ļ│äņłś ws, wcļź╝ Ļ░▒ņŗĀĒĢśĻ▓ī ļÉ£ļŗż.
ņŚ¼ĻĖ░ņä£ ╬╝nļŖö ĒĢäĒä░ņØś Ļ░▒ņŗĀ Ļ│äņłśņØ┤ļ®░, az(k)ļŖö ņĖĪņĀĢĒĢ£ ņżæĻ░äļ░øņ╣©ļīĆņØś Ļ░ĆņåŹļÅä ņŗĀĒśĖļĪ£ ņĀ£ņ¢┤ņŗ£ņŖżĒģ£ņØś ņśżņ░©ļĪ£ ņĀĢņØśĒĢ£ļŗż.
ņĀ£ņ¢┤ņ×ģļĀź fa(k)ļŖö Ļ░▒ņŗĀļÉ£ ĒĢäĒä░Ļ│äņłśļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņŗØ (13)ņ£╝ļĪ£ Ļ│äņé░ļÉ£ļŗż.
3.2 Ļ┤Ćņä▒ļīÉĒŹ╝ ļ│Ćņ£ä ņĀ£ĒĢ£ņØä Ļ│ĀļĀżĒĢ£ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”ś
Ļ┤Ćņä▒ļīÉĒŹ╝ļŖö ņŗØ (7)ņŚÉņä£ņÖĆ Ļ░ÖņØ┤ Ļ┤Ćņä▒ņ¦łļ¤ēņØś ņ¦łļ¤ēĻ│╝ Ļ░ĆņåŹļÅäņØś Ļ│▒ņŚÉ ĒĢ┤ļŗ╣ĒĢśļŖö Ļ┤Ćņä▒ļĀźņØ┤ ņżæĻ░äļ░øņ╣©ļīĆņŚÉ ņĀäļŗ¼ļÉśņ¢┤ ņĀ£ņ¢┤ņØś ĒÜ©Ļ│╝ļź╝ ņ¢╗ļŖöļŗż. ļö░ļØ╝ņä£ Ēü░ ĒלņØä ņ¢╗ĻĖ░ ņ£äĒĢ┤ņä£ļŖö Ļ┤Ćņä▒ņ¦łļ¤ēņØ┤ Ēü¼Ļ│Ā Ēü░ Ļ░ĆņåŹļÅäļĪ£ ļÅÖņ×æĒĢĀ ņłś ņ׳ņ¢┤ņĢ╝ ĒĢ£ļŗż. ĒĢśņ¦Ćļ¦ī Ļ┤Ćņä▒ļīÉĒŹ╝ļŖö ņłśļÅÖļ¦łņÜ┤ĒŖĖņÖĆ ļ│æļĀ¼ļĪ£ ņäżņ╣śļÉśļ»ĆļĪ£ ņäżņ╣śĻ│ĄĻ░äņØś ņĀ£ņĢĮ ļĢīļ¼ĖņŚÉ ņ¦łļ¤ēņØś Ēü¼ĻĖ░ ņĀ£ĒĢ£Ļ│╝ ņĢäņÜĖļ¤¼ ļ│Ćņ£ä ņĀ£ĒĢ£ņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż. ļö░ļØ╝ņä£ ņĀĢĒĢ┤ņ¦ä ņ×æļÅÖ ļ▓öņ£ä ļé┤ņŚÉņä£ ļÅÖņ×æļÉśņ¢┤ņĢ╝ ĒĢ£ļŗż.
Fig. 6ņØś Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØĆ ņÖĖļČĆĻĖ░ņ¦äļĀźņŚÉ ļīĆĒĢ£ ĒלņØś ņĀäļŗ¼ņØä Ļ░Éņåīņŗ£ĒéżļŖöļŹ░ ĒÜ©Ļ│╝ņĀüņØ┤ņ¦Ćļ¦ī Ļ┤Ćņä▒ļīÉĒŹ╝ ņ¦łļ¤ēņØś ņ×æļÅÖļ│Ćņ£ä ņĀ£ĒĢ£ņŚÉ ļīĆĒĢ£ Ļ│ĀļĀżĻ░Ć ņŚåļŗż. ņ”ē, Ļ┤Ćņä▒ņ¦łļ¤ēņØś ļ│Ćņ£äļŖö ņ×Éņ£ĀļĪŁļŗżļŖö Ļ░ĆņĀĢņØä ĻĖ░ņ┤łļĪ£ ĒĢ£ļŗż. ļö░ļØ╝ņä£ ņÜ┤ņÜ® ņżæ ļ│Ćņ£äņĀ£ĒĢ£ņØä ņ┤łĻ│╝ĒĢśļŖö Ļ│╝ļ│Ćņ£äĻ░Ć ļ░£ņāØĒĢśļ®┤ ļīÉĒŹ╝ņØś ņåÉņāüņØĆ ļ¼╝ļĪĀ ĻĖ░ĻĄ¼ņĀü ļ│Ćņ£äņĀ£ĒĢ£ļČĆņÖĆ ļīÉĒŹ╝ņ¦łļ¤ēņØś ņČ®ļÅīņØ┤ ļ░£ņāØĒĢśņŚ¼ ļ▓ĀņØ┤ņŖżņŚÉ ņČ®Ļ▓®ĒīīĻ░Ć ņĀäļŗ¼ļÉśĻ▓ī ļÉ£ļŗż. ļö░ļØ╝ņä£ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ļīÉĒŹ╝ ņ¦łļ¤ēņØ┤ ĒŚłņÜ® ļ│Ćņ£ä ļé┤ņŚÉņä£ļ¦ī ņ×æļÅÖĒĢĀ ņłś ņ׳ļÅäļĪØ Fig. 7ņØś ņāłļĪ£ņÜ┤ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀ£ņĢłĒĢ£ļŗż.
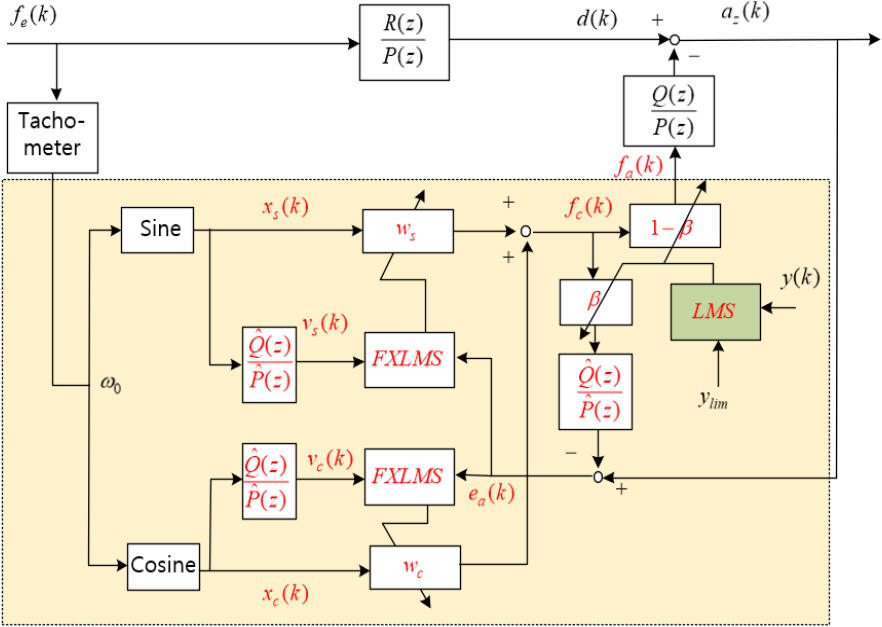
ņØ┤ ņĢīĻ│Āļ”¼ņ”śņØĆ Fig. 6Ļ│╝ ļŗ¼ļ”¼ Ļ│äņé░ļÉ£ ņĀ£ņ¢┤ņ×ģļĀźņŚÉ (1-╬▓)ļź╝ Ļ│▒ĒĢ£ ņ¢æļ¦ī ņŗżņĀ£ ņĀ£ņ¢┤ņ×ģļĀźņ£╝ļĪ£ ņé¼ņÜ®ĒĢśļ®░, ļéśļ©Ėņ¦Ć ╬▓ļ░░ļŖö ņśżņ░©ņŗĀĒśĖ Ļ│äņé░ņŚÉ ļ░śņśüĒĢśļŖö ņØ┤ĒĆäļØ╝ņØ┤ņĀĆ(equalizer) ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢśņśĆļŗż. ņØ┤ĒĆäļØ╝ņØ┤ņĀĆ ņĢīĻ│Āļ”¼ņ”śņØĆ ļŖźļÅÖņåīņØīņĀ£ņ¢┤ņŚÉņä£ ļ¬®Ēæ£ņ£äņ╣śņØś ņåīņØīņØä ņÖäņĀäĒ׳ ņĀ£Ļ▒░ĒĢśļŖö ļīĆņŗĀ ņØ╝ņĀĢ ļČĆļČäņØś ņåīņØīņØä ļé©Ļ▓©ļæÉļŖö ļ░®ļ▓ĢņØ┤ļŗż.
ĻĄ¼ņ▓┤ņĀüņ£╝ļĪ£ Fig. 6ņŚÉņä£ļŖö az(k)ļź╝ ņĄ£ņåīĒÖöĒĢśņ¦Ćļ¦ī Fig. 7ņŚÉņä£ļŖö d ( k ) ŌłÆ ╬▓ Q ( z ) P ( z ) f c ( k )
ņÜ░ņäĀ Fig. 7ņŚÉņä£ ĒĢäĒä░Ļ│äņłś Ļ░▒ņŗĀņØĆ ņŗØ (12)ļź╝ ĒåĄĒĢ┤ ļÅÖņØ╝ĒĢśĻ▓ī ņØ┤ļŻ©ņ¢┤ņ¦Ćļ®░, Ļ│äņé░ļÉ£ ņĀ£ņ¢┤ņ×ģļĀź fc(k)Ļ│╝ ņŗżņĀ£ ņŗ£ņŖżĒģ£ņŚÉ Ļ░ĆĒĢ┤ņ¦ĆļŖö ņĀ£ņ¢┤ņ×ģļĀź fa(k), ĻĘĖļ”¼Ļ│Ā ņśżņ░© ea(k)ļŖö ņŗØ (14)ļĪ£ Ļ│äņé░ļÉ£ļŗż.
ņŚ¼ĻĖ░ņä£ f ^ c ( k )

Ļ┤Ćņä▒ļīÉĒŹ╝ņØś ņ¦łļ¤ēņØ┤ ņĄ£ļīĆĒŚłņÜ®ļ│Ćņ£ä ļé┤ņŚÉņä£ ļÅÖņ×æĒĢśļÅäļĪØ ĒĢśĻĖ░ ņ£äĒĢ£ ņĪ░ņĀĢĻ│äņłś ╬▓ņØś Ļ░▒ņŗĀņØĆ Fig. 7, 8Ļ│╝ Ļ░ÖņØ┤ LMS ņĢīĻ│Āļ”¼ņ”śņØä ņØ┤ņÜ®ĒĢ£ļŗż. ņÜ░ņäĀ Ļ┤Ćņä▒ņ¦łļ¤ēņØś ļ│Ćņ£ä ņ¦äĒÅŁņØś Ēü¼ĻĖ░ļŖö LMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢ£ ņŗØ (15)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņČöņĀĢĒĢ£ļŗż.
ņŚ¼ĻĖ░ņä£ Yamp(k)Ļ░Ć ņČöņĀĢĒĢ£ ļīÉĒŹ╝ņ¦łļ¤ēņØś ļ│Ćņ£ä ņ¦äĒÅŁņØś Ēü¼ĻĖ░ņØ┤ļŗż. ĻĖ░ņ¦äļĀźņØ┤ ļŗ©ņØ╝ ņŻ╝ĒīīņłśņØ┤ļ»ĆļĪ£ ļīÉĒŹ╝ ņ¦łļ¤ēņØś ļ│Ćņ£äļÅä ņĀĢĒśäĒīī ĒśĢĒā£ļź╝ Ļ░Ćņ¦Ćļ®░, ļö░ļØ╝ņä£ LMS ņĢīĻ│Āļ”¼ņ”śņ£╝ļĪ£ ņØ┤ ļ│Ćņ£äņØś ņĀĢĒśäĒīī ņä▒ļČäĻ│╝ ņŚ¼ĒśäĒīī ņä▒ļČäņØś Ēü¼ĻĖ░ņØĖ ws(k), wc(k)ļź╝ ĻĄ¼ĒĢĀ ņłś ņ׳ņ£╝ļ®░, ļö░ļØ╝ņä£ ņŗØ (15)ņŚÉņä£ ļ│Ćņ£äņØś Ēü¼ĻĖ░ Yamp(k)ņØä ņ¢╗ņØä ņłś ņ׳ļŗż.
ņØ┤ Yamp(k)ņÖĆ ĒŚłņÜ®ņĄ£ļīĆļ│Ćņ£ä ylimņØś ņ░©ņØ┤ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņŗØ (16)Ļ│╝ Ļ░ÖņØ┤ ╬▓ļź╝ Ļ░▒ņŗĀĒĢ£ļŗż. ņ”ē, Ļ│╝ļīĆļ│Ćņ£äĻ░Ć ļ░£ņāØĒĢśļ®┤ (Yamp(k) > ylim) ╬▓ļź╝ ņ”ØĻ░Ćņŗ£Ēéżļ®░, ĒŚłņÜ® ļ▓öņ£ä ļé┤ņŚÉ ņ׳ņ£╝ļ®┤ (Yamp(k) < ylim) ╬▓ļź╝ Ļ░Éņåīņŗ£Ēé©ļŗż. ļŗ©, ╬▓ļŖö ĒĢŁņāü ņ¢æņłśņØĖ ņĪ░Ļ▒┤ņØä ļ¦īņĪ▒ĒĢśļÅäļĪØ ĒĢ£ļŗż.
ņØ┤ļ¤¼ĒĢ£ ļ░®ļ▓Ģņ£╝ļĪ£ ņŻ╝ņ¢┤ņ¦ä ļīÉĒŹ╝ņ¦łļ¤ēņØś ļ│Ćņ£äņĀ£ĒĢ£ņØä ļ¦īņĪ▒ĒĢśļŖö ļ▓öņ£äņŚÉņä£ ņĄ£ņĀüņØś ņĀ£ņ¢┤ņä▒ļŖźņØä ĻĄ¼ĒśäĒĢĀ ņłś ņ׳ļÅäļĪØ ĒĢ£ļŗż.
ņŗ£ļ«¼ļĀłņØ┤ņģś
ņĢ×ņŚÉņä£ ņĀ£ņĢłĒĢ£ ņĀ£ņ¢┤ļ░®ļ▓ĢņØś ĒāĆļŗ╣ņä▒Ļ│╝ ņä▒ļŖź Ļ▓Ćņ”ØņØä ņ£äĒĢ┤ ņĀäņé░ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņŗżņŗ£ĒĢśņśĆļŗż. ņŗ£ļ«¼ļĀłņØ┤ņģś ļ¬©ļŹĖņØĆ Fig. 5ņÖĆ Ļ░Öņ£╝ļ®░, ņŗ£ņŖżĒģ£ ĒīīļØ╝ļ»ĖĒä░ļŖö Table 1Ļ│╝ Ļ░Öļŗż. ņāüļČĆņÖĆ ĒĢśļČĆņŚÉ ņĀüņÜ®ļÉ£ ļ¦łņÜ┤ĒŖĖļŖö ļ»ĖĒĢ┤ĻĄ░ņØś ĒĢ©ņĀĢņÜ® Ēæ£ņżĆ Ļ│Āļ¼┤ļ¦łņÜ┤ĒŖĖ 6E2000ņØ┤ļ®░[2], Ļ┤Ćņä▒ļīÉĒŹ╝ņØś ņ¦łļ¤ēņØĆ 3 kg, Ļ│Āņ£Āņ¦äļÅÖņłśļŖö 20 Hz, Ļ░ÉņćĀļ╣äļŖö 0.05ļĪ£ Ļ░ĆņĀĢĒĢśņśĆļŗż. ņŗ£ļ«¼ļĀłņØ┤ņģśņØĆ MatLab/Simulinkļź╝ ņØ┤ņÜ®ĒĢśņśĆļŗż.
Table┬Ā1.
System Parameters
Fig. 9ļŖö Ļ░£ĒÜīļĪ£ ņŗ£ņŖżĒģ£ņŚÉņä£ ĻĖ░ņ¦äļĀźĻ│╝ ņżæĻ░äļ░øņ╣©ļīĆ Ļ░ĆņåŹļÅä ņé¼ņØ┤ņØś ņŻ╝ĒīīņłśņØæļŗĄĒĢ©ņłś Ēü¼ĻĖ░ļĪ£, 4.6 HzņÖĆ 11.1 Hz ļæÉ Ļ│Āņ£Āņ¦äļÅÖņłśņŚÉņä£ Ēö╝Ēü¼ļź╝ ļ│┤ņØ┤ļ®░, ņŻ╝Ēīīņłś ņ”ØĻ░ĆņŚÉ ļö░ļØ╝ ĻĘĖ Ēü¼ĻĖ░Ļ░Ć ĻĖēĻ▓®Ē׳ Ļ░ÉņåīĒĢ£ļŗż. ņØ┤ļŖö Ļ│Āļ¼┤ļ¦łņÜ┤ĒŖĖ ļÅÖĒŖ╣ņä▒ņØś Ļ▓░Ļ│╝ņØ┤ļŗż.
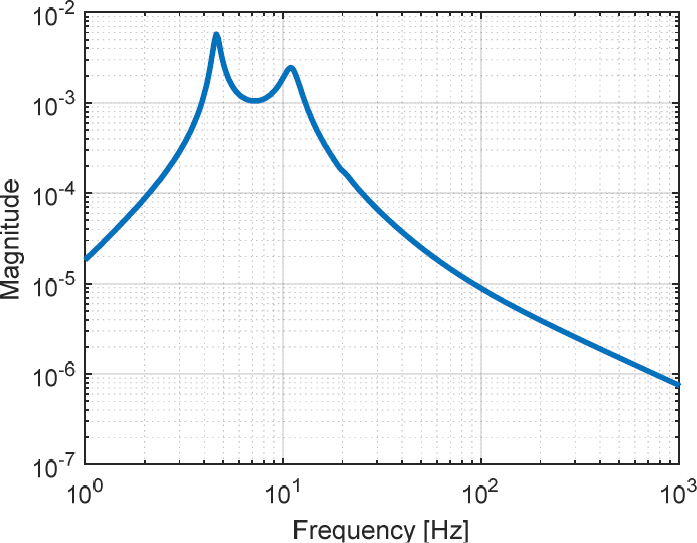
Fig. 10ņØĆ Ēü¼ĻĖ░ 3,553 NņØś 30 Hz ņĀĢĒśäĒīī ĻĖ░ņ¦äļĀźņØ┤ ņāüļČĆļ░øņ╣©ļīĆņŚÉ Ļ░ĆĒĢ┤ņ¦ł ļĢī ņżæĻ░äļ░øņ╣©ļīĆņØś Ļ░ĆņåŹļÅäļĪ£ ļ╣äņĀ£ņ¢┤ ņØæļŗĄĻ│╝ Fig. 6ņØś ĻĖ░ņĪ┤ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢ£ ņØæļŗĄņØ┤ļŗż. ņŚ¼ĻĖ░ņä£ 2ņ░© Ļ▓ĮļĪ£ ņĀäļŗ¼ĒĢ©ņłśļŖö ļ│ĖļלņØś ņĀäļŗ¼ĒĢ©ņłśļź╝ ņĀüņÜ®ĒĢśņśĆļŗż. ļ╣äņĀ£ņ¢┤ņŗ£ ņ┤łĻĖ░ņØś ņØæļŗĄņØĆ ņŗ£ņŖżĒģ£ņØś ņ┤łĻĖ░ņĪ░Ļ▒┤ņŚÉ ņØśĒĢ£ ņ▓£ņØ┤ņØæļŗĄņØ┤ļ®░, Ļ░ÉņćĀļ╣äĻ░Ć ņ×æņĢä ņĢĮ 4ņ┤ł ņØ┤ĒøäņŚÉ ņĀĢņāüņāüĒā£ ņØæļŗĄņŚÉ ņłśļĀ┤ĒĢśņśĆļŗż. FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢ£ ņØæļŗĄņŚÉņä£ ņ┤łĻĖ░ņØæļŗĄņØĆ ņŗ£ņŖżĒģ£ ņ┤łĻĖ░ņĪ░Ļ▒┤Ļ│╝ ņĢīĻ│Āļ”¼ņ”śņØś ĒĢäĒä░Ļ│äņłśĻ░Ć ņ┤łĻĖ░ Ļ░Æ 0ņŚÉņä£ Ēü░ ļ│ĆĒÖöļĪ£ Ļ░▒ņŗĀļÉśļŖö ļÅÖņĢłņØś ĒŖ╣ņä▒ņØ┤ ĒĢ®ĒĢ┤ņ¦ä ņØæļŗĄņØ┤ļ®░, ĒĢäĒä░Ļ│äņłśĻ░Ć ņłśļĀ┤ĒĢ£ ņØ┤Ēøä Ļ░ĆņåŹļÅäļŖö ņśüņ£╝ļĪ£ ņłśļĀ┤ĒĢ£ļŗż.
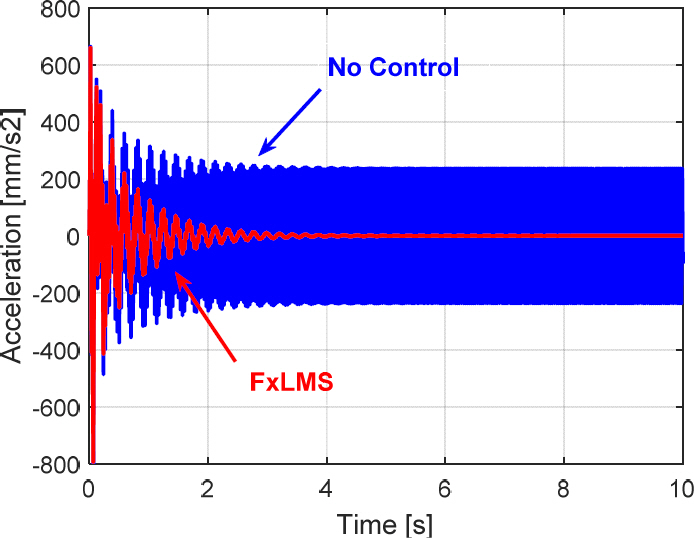
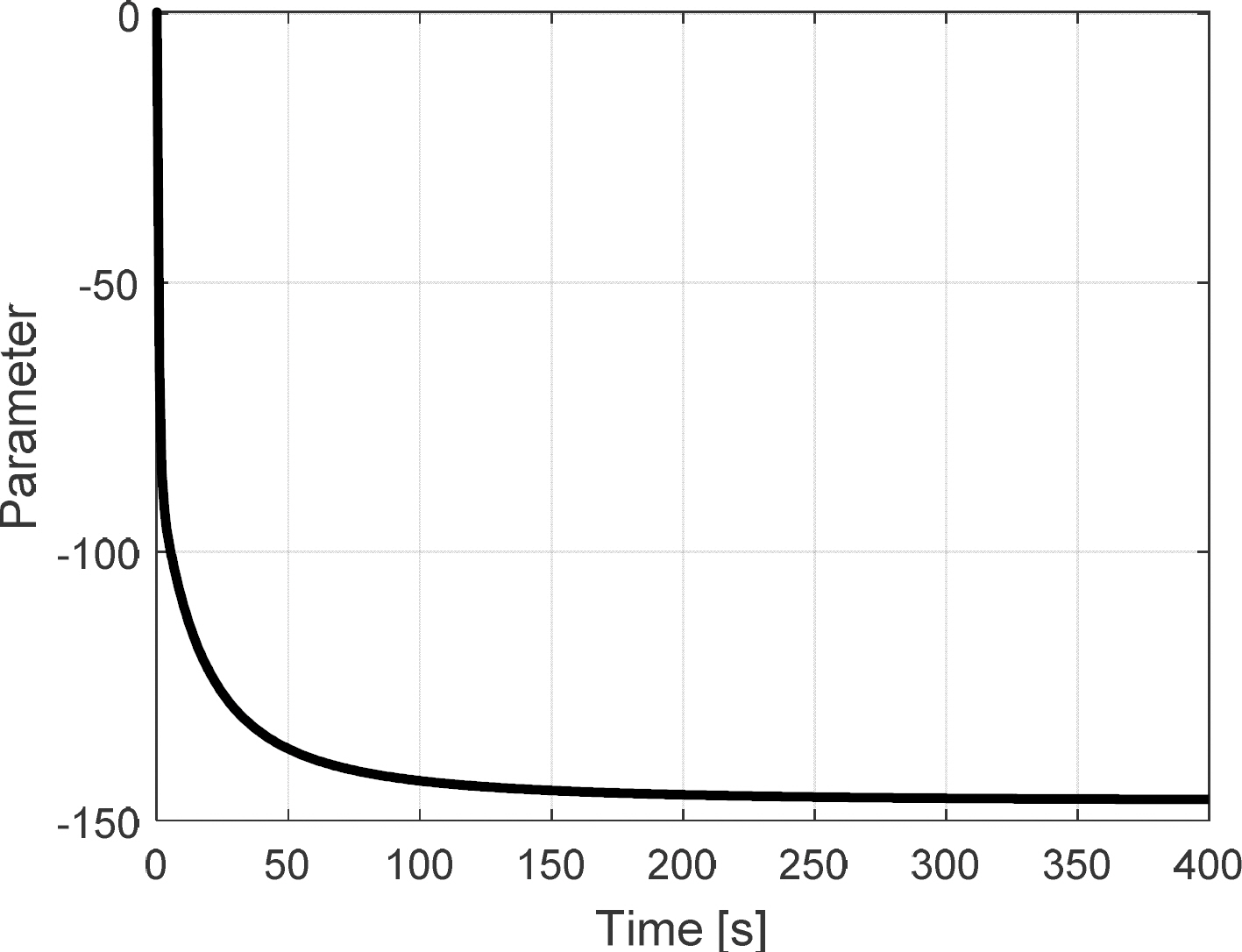
Fig. 11.1Ļ│╝ Fig. 11.2ļŖö ĒĢäĒä░Ļ│äņłś ws(k)ņÖĆ wc(k)ļĪ£ ņŗØ (12)ņŚÉ ļö░ļØ╝ Ļ░▒ņŗĀļÉśņ¢┤ ņØ╝ņĀĢ Ļ░Æņ£╝ļĪ£ ņłśļĀ┤ĒĢ©ņØä ļ│┤ņØĖļŗż. Fig. 11.3ņØĆ ņØ┤ ļĢī Ļ▓░ņĀĢļÉ£ ņĀ£ņ¢┤ņ×ģļĀźņŚÉ ļö░ļźĖ ļīÉĒŹ╝ņ¦łļ¤ēņØś ļ│Ćņ£äļĪ£ ĒĢäĒä░Ļ│äņłśņØś ņłśļĀ┤ņŚÉ ļö░ļØ╝ ņØ╝ņĀĢĒĢ£ ņĀĢĒśäĒīī ĒĢ©ņłś ĒśĢĒā£ļĪ£ ņ¦äļÅÖĒĢśņŚ¼ ņżæĻ░äļ░øņ╣©ļīĆņØś ņ¦äļÅÖņØä ņĀ£Ļ▒░ĒĢ£ļŗż.

ļŗżņØīņ£╝ļĪ£ ņāüļČĆļ░øņ╣©ļīĆņŚÉ ņ¦łļ¤ēļČłĻĘĀĒśĢ 0.1 kg mņØä Ļ░Ćņ¦ä ĒÜīņĀäĻĖ░ĻĖ░Ļ░Ć 400ņ┤ł ļÅÖņĢł ĒÜīņĀäņåŹļÅäĻ░Ć 30 Hz Ōł╝ 400 Hz (1200 RPM Ōł╝ 24000 RPM) ļ▓öņ£äņŚÉņä£ ņäĀĒśĢ ņ”ØĻ░ĆĒĢśļŖö Ļ▓ĮņÜ░ļź╝ ņŗ£ļ«¼ļĀłņØ┤ņģś ĒĢśņśĆļŗż. Fig. 12ļŖö ņØ┤ļĢīņØś ņøÉņŗ¼ļĀźņŚÉ ņØśĒĢ£ ņłśņ¦üļ░®Ē¢ź ĻĖ░ņ¦äļĀźņ£╝ļĪ£ ĒÜīņĀäņåŹļÅäņØś ņĀ£Ļ│▒ņŚÉ ļ╣äļĪĆĒĢ£ļŗż.

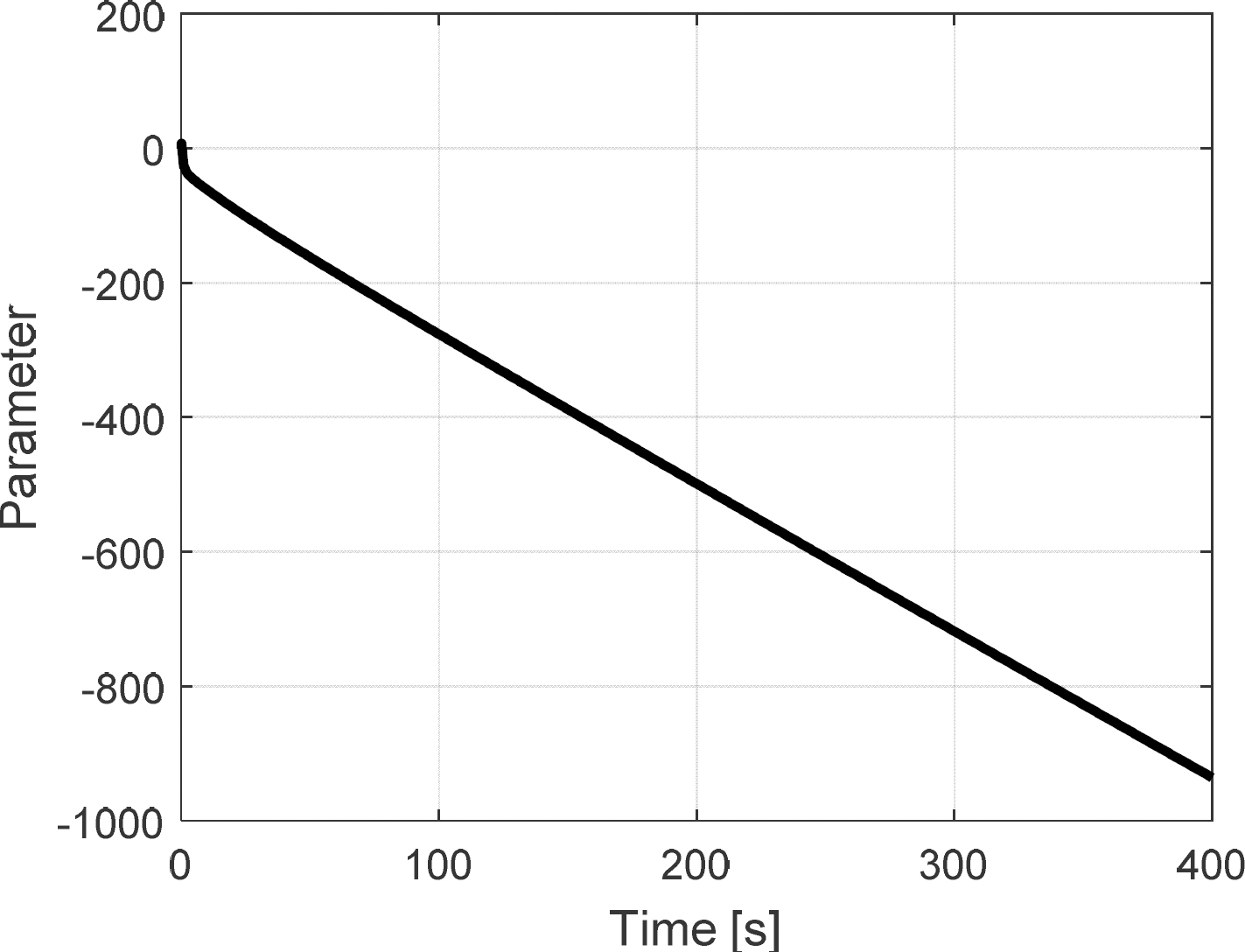
Fig. 13ņØĆ ņØ┤ ĻĖ░ņ¦äļĀźņØ┤ Ļ░ĆĒĢ┤ņ¦ĆļŖö ļÅÖņĢł ļ╣äņĀ£ņ¢┤ņÖĆ ĻĖ░ņĪ┤ FxLMS ņĢīĻ│Āļ”¼ņ”śņ£╝ļĪ£ ņĀ£ņ¢┤ĒĢ£ Ļ▓ĮņÜ░ ņżæĻ░äļ░øņ╣©ļīĆņØś Ļ░ĆņåŹļÅä ņØæļŗĄņØ┤ļŗż. ļ╣äņĀ£ņ¢┤ņØś Ļ▓ĮņÜ░ Ļ│ĀņŻ╝Ēīī ņśüņŚŁņŚÉņä£ ņŻ╝ĒīīņłśņŚÉ Ļ▒░ņØś ļ╣äļĪĆĒĢśņŚ¼ Ļ░ĆņåŹļÅä Ēü¼ĻĖ░Ļ░Ć ņ”ØĻ░ĆĒĢśļŖöļŹ░, ņØ┤ļŖö ņøÉņŗ¼ļĀźņØ┤ ĒÜīņĀäņåŹļÅäņØś ņĀ£Ļ│▒ņŚÉ ļ╣äļĪĆĒĢśļ®░, ņŗØ (8)ņØś ņÜ░ĒĢŁ ņ▓½ ļ▓łņ¦Ė ņÜöņåīņØś ņĀäļŗ¼ĒĢ©ņłśņŚÉņä£ ļČäļ¬©ņØś ņ░©ņłśĻ░Ć ļČäņ×ÉņŚÉ ļ╣äĒĢ┤ 1ņ░©Ļ░Ć ļåÆņØĆ ĒŖ╣ņä▒ ļĢīļ¼ĖņØ┤ļŗż. ņĀ£ņ¢┤ņØś Ļ▓ĮņÜ░ ņ┤łĻĖ░ņØś Ēü░ Ļ░ĆņåŹļÅä ņØæļŗĄņØĆ ĒĢäĒä░Ļ│äņłśĻ░Ć ņ┤łĻĖ░ņ╣ś 0ņŚÉņä£ ņĄ£ņĀüņØś Ļ░Æņ£╝ļĪ£ ņłśļĀ┤ņØ┤ ņØ┤ļŻ©ņ¢┤ņ¦ĆļŖö ļÅÖņĢłņØś ņØæļŗĄņØ┤ļ®░, ņłśļĀ┤ņØ┤ ņØ┤ļŻ©ņ¢┤ņ¦ä Ēøä ņØæļŗĄņØĆ Ļ▒░ņØś ņśüņŚÉ Ļ░ĆĻ╣Øļŗż. ĒÜīņĀäņåŹļÅäņØś ņ”ØĻ░ĆĻ░Ć ņ▓£ņ▓£Ē׳ ņØ┤ļŻ©ņ¢┤ņ¦Ćļ®┤ ņØæļŗĄņØĆ ļŹö ņ×æņØĆ Ļ░ÆņØä ļ│┤ņØ┤ļŖöļŹ░, ņØ┤ļŖö ņāüļīĆņĀüņ£╝ļĪ£ Ļ░Ćņ¦äņŻ╝Ēīīņłś ļ│ĆĒÖö ļīĆļ╣ä ĒĢäĒä░Ļ│äņłś Ļ░▒ņŗĀņØ┤ ļŹö ļ¦ÄņØ┤ ņØ┤ļŻ©ņ¢┤ņ¦ĆĻĖ░ ļĢīļ¼ĖņØ┤ļŗż.

Fig. 14.1Ļ│╝ 14.2ļŖö Ļ░▒ņŗĀļÉ£ ĒĢäĒä░Ļ│äņłśļĪ£ ņ┤łĻĖ░ ņłśļĀ┤ņØ┤ ņØ┤ļŻ©ņ¢┤ņ¦ä Ēøä ļ│ĆĒÖöĒĢśļŖö ĻĖ░ņ¦äļĀź ņŻ╝ĒīīņłśņŚÉ ņĀüņØæĒĢśņŚ¼ ņĄ£ņĀüņØś ĒĢäĒä░Ļ│äņłśļĪ£ ņłśļĀ┤ĒĢ©ņØä ņĢī ņłś ņ׳ļŗż. Fig. 14.3ņØĆ ņĀ£ņ¢┤ĒĢśļŖö ļÅÖņĢłņØś ļīÉĒŹ╝ņ¦łļ¤ēņØś ļ│Ćņ£äļĪ£ Ļ│ĀņŻ╝ĒīīņłśļĪ£ Ļ░łņłśļĪØ ņ×æņĢäņ¦ĆļŖö ļŹ░, ļīÉĒŹ╝ņ¦łļ¤ēņØś Ļ┤Ćņä▒ļĀźņØĆ ļ│Ćņ£äņØś Ēü¼ĻĖ░ņÖĆ ņŻ╝ĒīīņłśņØś ņĀ£Ļ│▒ņØś Ļ│▒ņŚÉ ļ╣äļĪĆĒĢśĻĖ░ ļĢīļ¼ĖņØ┤ļŗż.
ļŗżņØīņ£╝ļĪ£ ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ ņĀ£ņĢłĒĢ£ Fig. 7, 8ņØś ļīÉĒŹ╝ņ¦łļ¤ēņØś ņĄ£ļīĆĒŚłņÜ®ļ│Ćņ£äļź╝ Ļ│ĀļĀżĒĢ£ ņłśņĀĢļÉ£ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢśņśĆļŗż. ņÜ░ņäĀ ņāüļČĆļ░øņ╣©ļīĆņŚÉ ņ×æņÜ®ĒĢśļŖö ĻĖ░ņ¦äļĀźņØ┤ Fig. 15ņÖĆ Ļ░ÖņØ┤ ĻĖ░ļ│Ė 30 HzņØś ņĀĢĒśäĒīīņŚÉ ĻĘĖ Ēü¼ĻĖ░Ļ░Ć ļ│ĆĒÖöĒĢśļŖö Ļ▓ĮņÜ░ļź╝ ļīĆņāüņ£╝ļĪ£ ņŗ£ļ«¼ļĀłņØ┤ņģś ĒĢśņśĆļŗż.
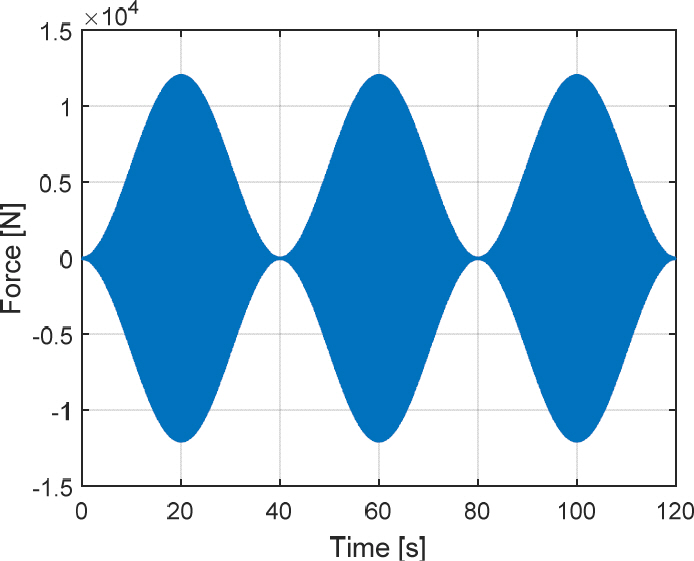
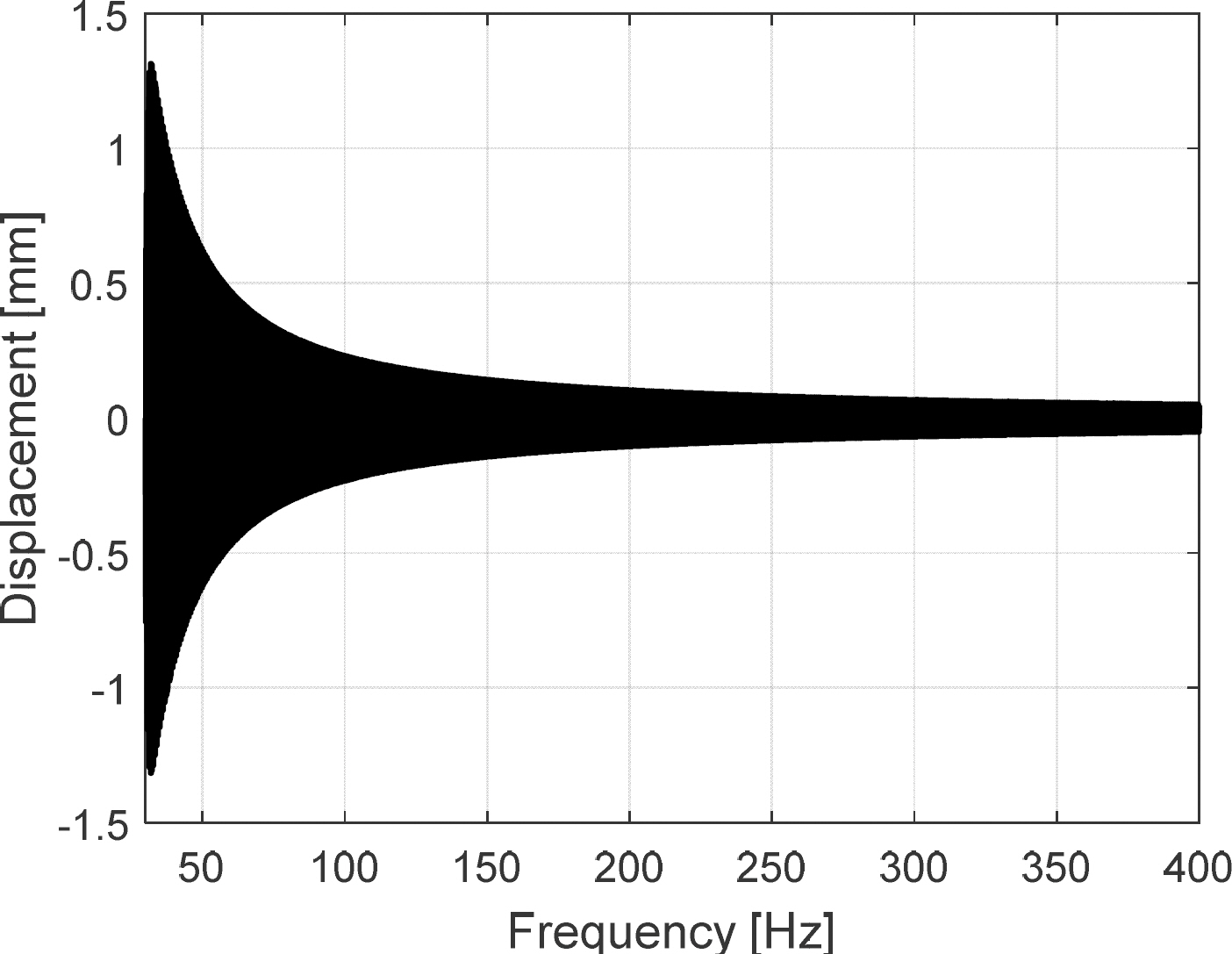
Fig. 16ņØĆ ļ╣äņĀ£ņ¢┤, ĻĖ░ņĪ┤ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”ś, ņĀ£ņĢłĒĢ£ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢśņŚ¼ ņĀ£ņ¢┤Ē¢łņØä ļĢīņØś ņżæĻ░äļ░øņ╣©ļīĆņØś Ļ░ĆņåŹļÅäņØ┤ļŗż. ļīÉĒŹ╝ ņ¦łļ¤ēņØś ņĄ£ļīĆĒŚłņÜ®ļ│Ćņ£äļŖö 3 mmļĪ£ Ļ░ĆņĀĢĒĢśņśĆļŗż. ļ╣äņĀ£ņ¢┤ņŗ£ ņØæļŗĄĻ│╝ ļ╣äĻĄÉ ĻĖ░ņĪ┤ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢśļ®┤ ņØæļŗĄņØĆ Ēü░ Ļ░Éņåīļź╝ ļ│┤ņØĖļŗż. ņØ┤ ļĢīņØś ĒĢäĒä░Ļ│äņłśņØś Ļ░▒ņŗĀņØĆ Fig. 17.1, 17.2ņÖĆ Ļ░ÖņØ┤ Fig. 15ņØś ĻĖ░ņ¦äļĀź Ēü¼ĻĖ░ņØś ļ│ĆĒÖö ņŻ╝Ēīīņłśļź╝ ļö░ļØ╝ Ļ░▒ņŗĀļÉ©ņØä ņĢī ņłś ņ׳ļŗż. ņØ┤ ļĢī ļīÉĒŹ╝ņ¦łļ¤ēņØś ļ│Ćņ£äļŖö Fig. 18Ļ│╝ Ļ░ÖņØ┤ ņĄ£ļīĆĒŚłņÜ®ļ│Ćņ£ä 3 mmļź╝ ņ┤łĻ│╝ĒĢ£ļŗż.
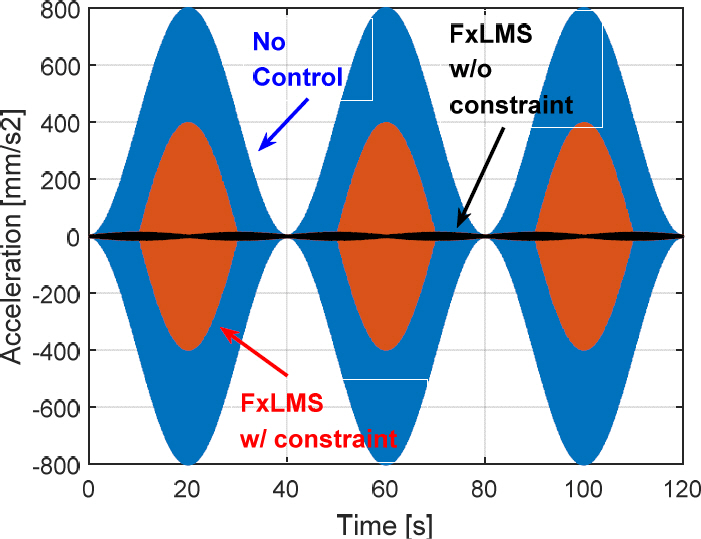

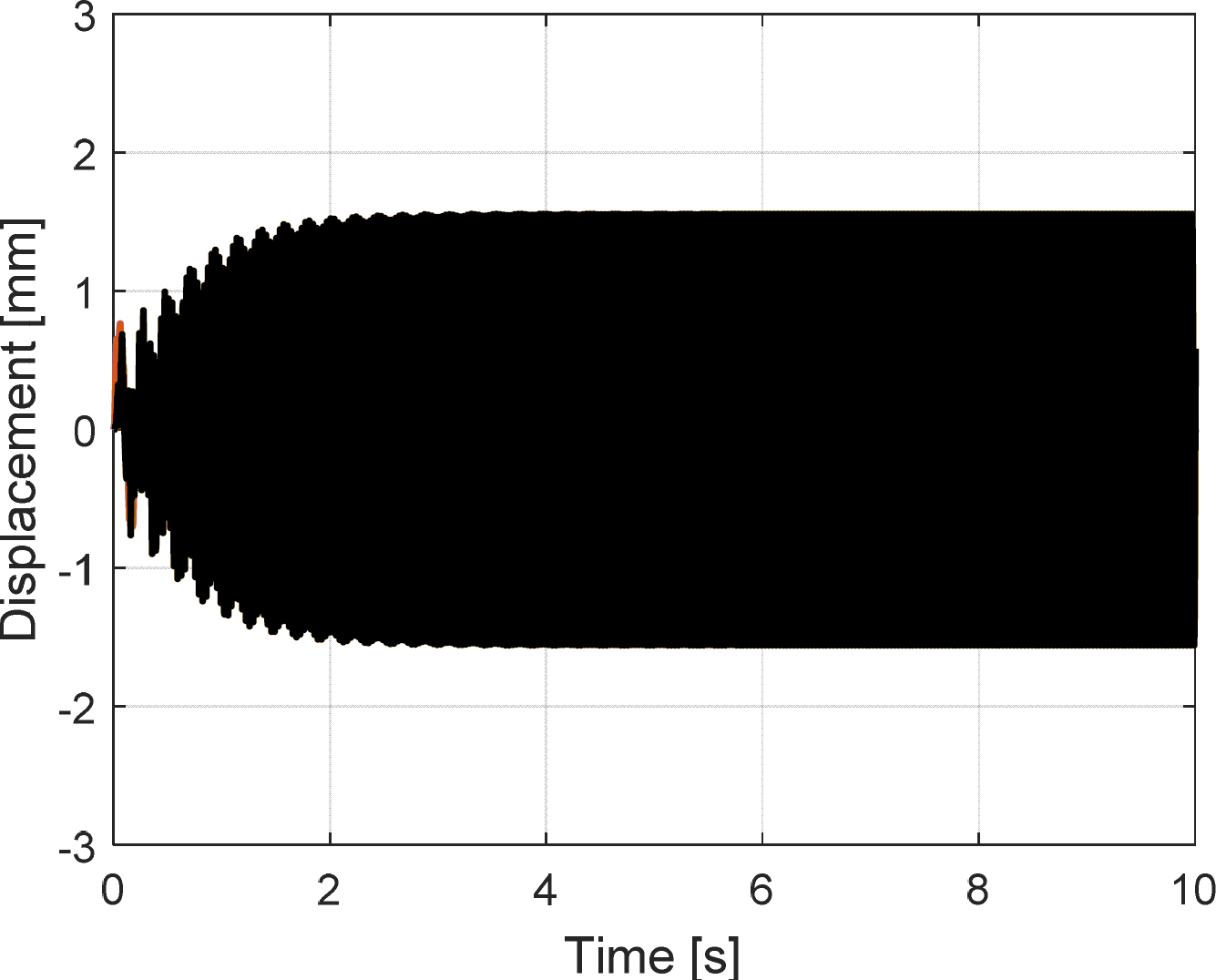
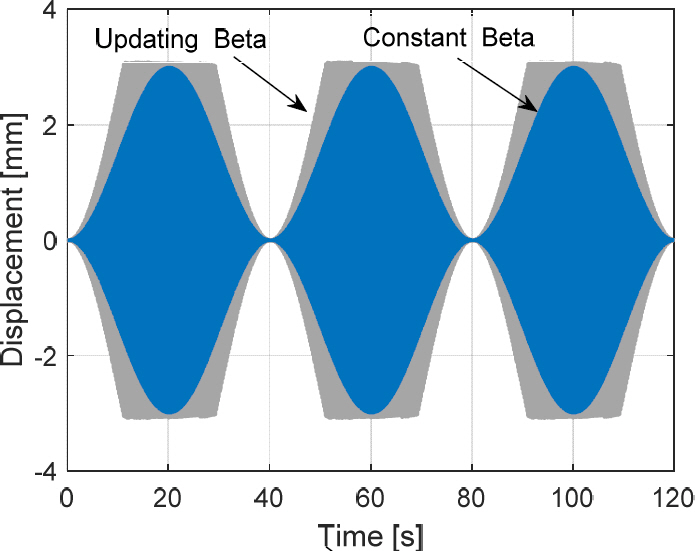
ļ░śļ®┤ ņĀ£ņĢłļÉ£ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢ£ Ļ▓ĮņÜ░ ļīÉĒŹ╝ņ¦łļ¤ēņØś ļ│Ćņ£äļŖö Fig. 19ņÖĆ Ļ░ÖņØ┤ ņŻ╝ņ¢┤ņ¦ä ļ│Ćņ£äņĀ£ĒĢ£ņØä ļ¦īņĪ▒ĒĢśļ®░ ņ×æļÅÖĒĢ©ņØä ņĢī ņłś ņ׳ļŗż. Fig. 16ņØś ņØæļŗĄņŚÉņä£ ļČäņäØĒĢśļ®┤ ĒŚłņÜ®ļ▓öņ£ä ļé┤ņŚÉņä£ ņ×æļÅÖĒĢśļŖö ĻĄ¼Ļ░äņŚÉņä£ļŖö Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØ┤ ņĀüņÜ®ļÉśņ¢┤ ņÜ░ņłśĒĢ£ ņØæļŗĄņØä ļ│┤ņØ┤ļéś, ĒŚłņÜ®ļ▓öņ£äļź╝ ņ┤łĻ│╝ĒĢśņ¦Ć ņĢŖļÅäļĪØ ņĀ£ņ¢┤ņ×ģļĀźņØä ņĀ£ĒĢ£ĒĢśļŖö ĻĄ¼Ļ░äņŚÉņä£ļŖö ļ╣äņĀ£ņ¢┤ņŗ£ļ│┤ļŗżļŖö ņ×æĻ│Ā Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”ś ņĀüņÜ® ņŗ£ļ│┤ļŗżļŖö Ēü╝ņØä ņĢī ņłś ņ׳ļŗż.
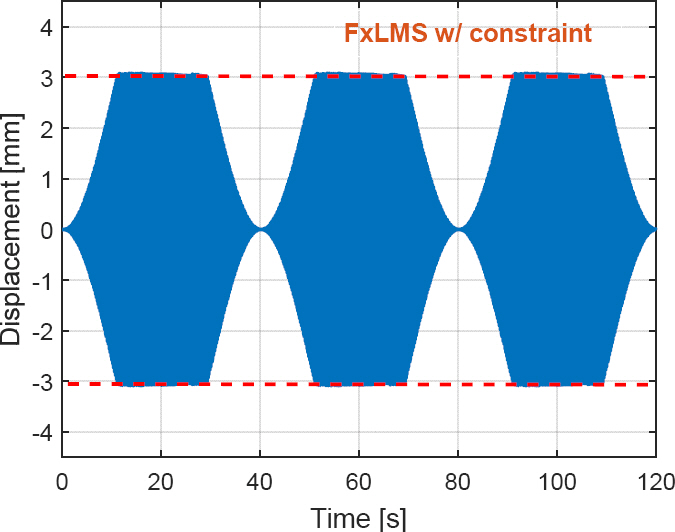
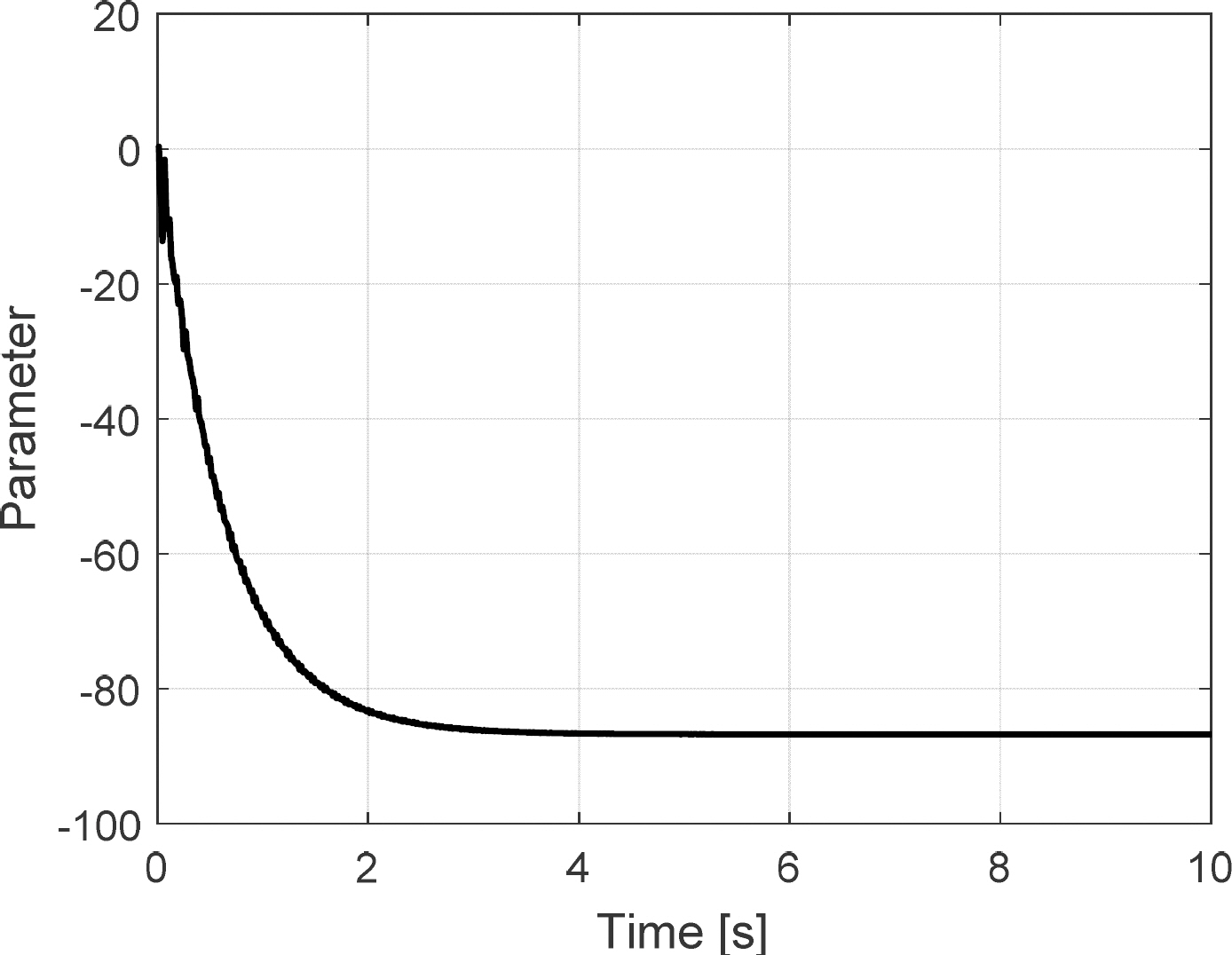
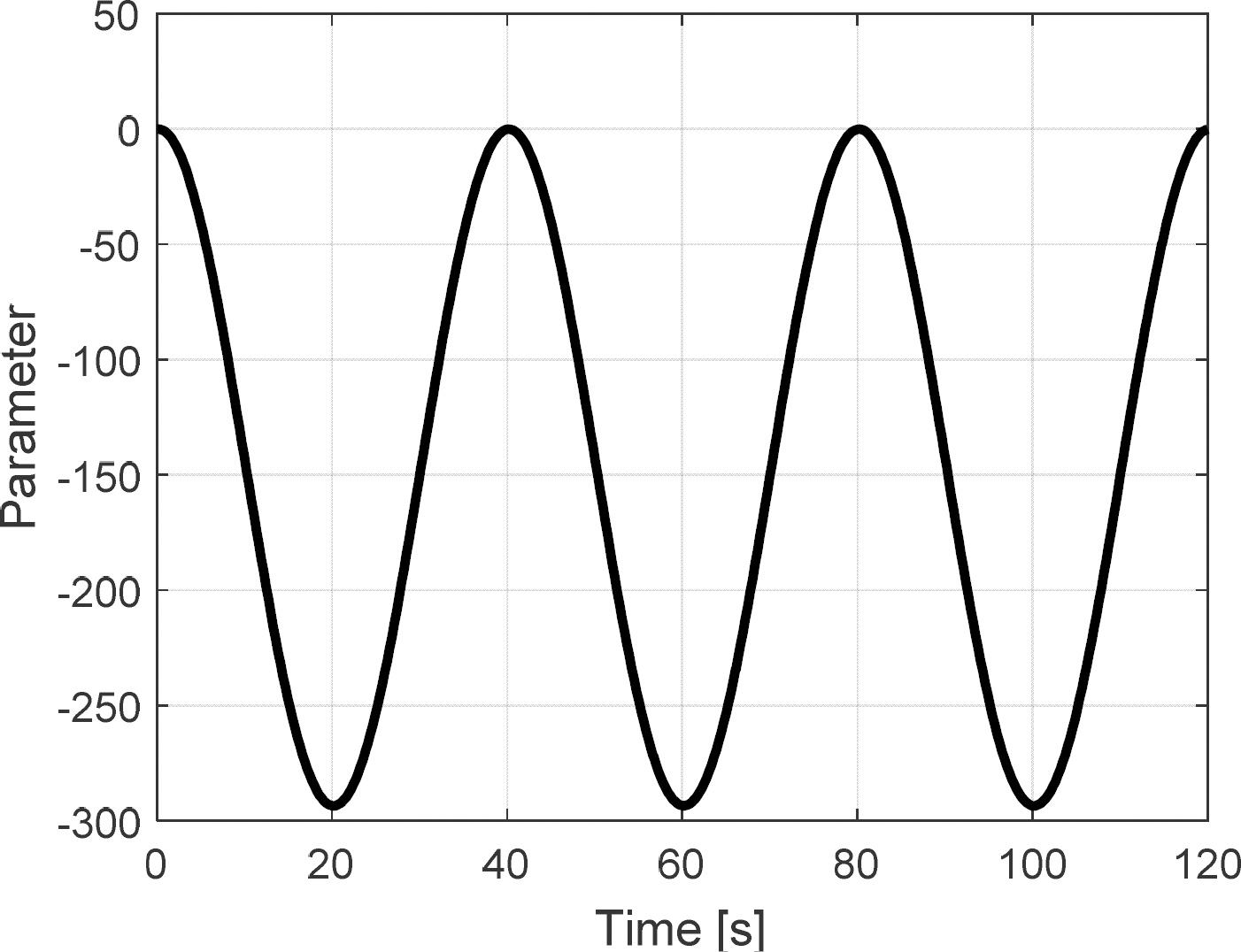
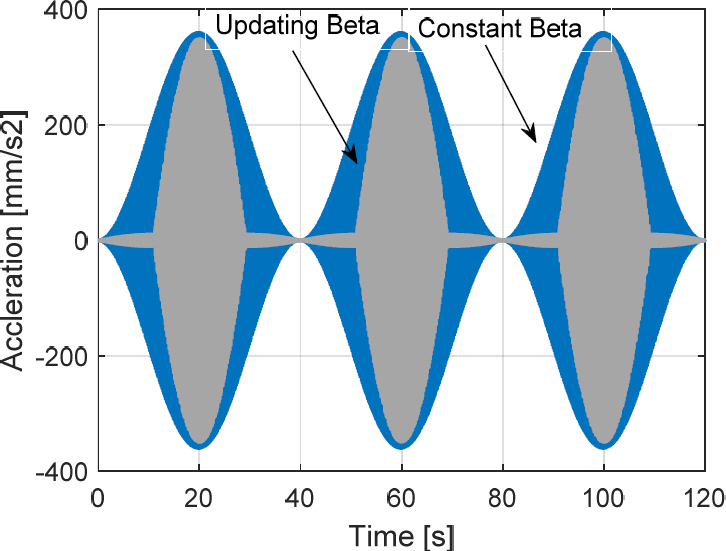
Fig. 19ņÖĆ Ļ░ÖņØ┤ ņŻ╝ņ¢┤ņ¦ä ļ│Ćņ£äņĀ£ĒĢ£ņØä ļ¦īņĪ▒ĒĢśļ®░ ņ×æļÅÖĒĢ©ņØä ņĢī ņłś ņ׳ļŖöļŹ░, ņØ┤ļŖö ņŗØ (15)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņČöņĀĢĒĢ£ Fig. 20.1ņØś ņ¦łļ¤ēļ│Ćņ£ä ņ¦äĒÅŁņŚÉ ĻĖ░ņ┤łĒĢśņŚ¼ Fig. 20.2ņÖĆ Ļ░ÖņØ┤ ņĪ░ņĀĢĻ│äņłś ╬▓(k)Ļ░Ć ņĀüņØæņĀüņ£╝ļĪ£ ļ│ĆĒÖöĒĢ£ Ļ▓░Ļ│╝ņØ┤ļŗż. ņØ┤ ļĢīņØś ņŗżņĀ£ ņŗ£ņŖżĒģ£ņŚÉ Ļ░ĆĒĢ┤ņ¦ĆļŖö ņĀ£ņ¢┤ņ×ģļĀźņØĆ Fig. 20.3Ļ│╝ Ļ░ÖņØ┤ ļ│Ćņ£ä ņĀ£ĒĢ£ ļ▓öņ£ä ļé┤ņŚÉņä£ ĒżĒÖöļÉśļŖö ĒśĢĒā£ļź╝ ļ│┤ņØĖļŗż. ļŗ╣ņŚ░Ē׳ ņĀ£ĒĢ£ ļ▓öņ£ä ļé┤ņŚÉņä£ ņ×æļÅÖĒĢśļŖö ĻĄ¼Ļ░äņŚÉņä£ļŖö Fig. 16Ļ│╝ Ļ░ÖņØ┤ Narrow Band FxLMS ņĀ£ņ¢┤ņŚÉ ļ╣äĒĢ┤ Ļ░ĆņåŹļÅäĻ░Ć ņ”ØĻ░ĆĒĢśņŚ¼ ņØæļŗĄ ņä▒ļŖźņØś ņĀĆĒĢśĻ░Ć ļ░£ņāØĒĢ£ļŗż. ĒĢśņ¦Ćļ¦ī ĻĖ░ĻĄ¼ņĀü Ļ│╝ļīĆļ│Ćņ£ä ņ░©ļŗ© ņןņ╣śņÖĆņØś ņČ®ļÅīņØä Ēö╝ĒĢĀ ņłś ņ׳ņ¢┤ ļīÉĒŹ╝ņØś ĒīīņåÉĻ│╝ ņČ®Ļ▓®ņØś ņĀäĒīīļź╝ ņśłļ░®ĒĢśļŖö ņןņĀÉņØä ļ│┤ņןĒĢĀ ņłś ņ׳ļŗż.
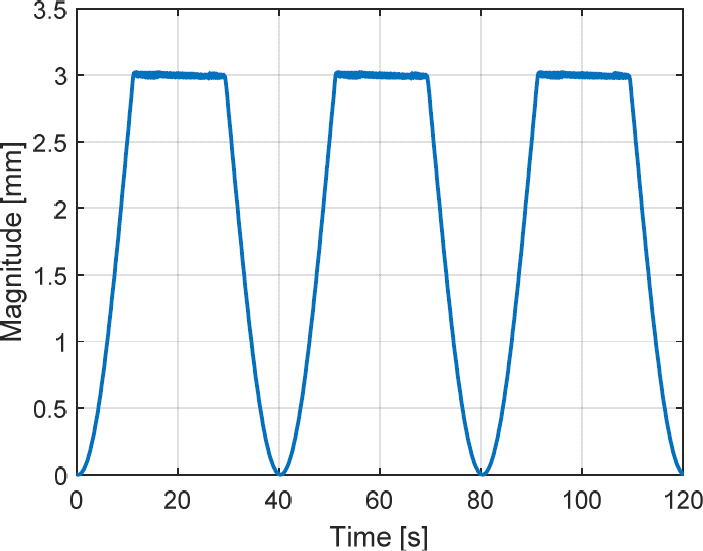
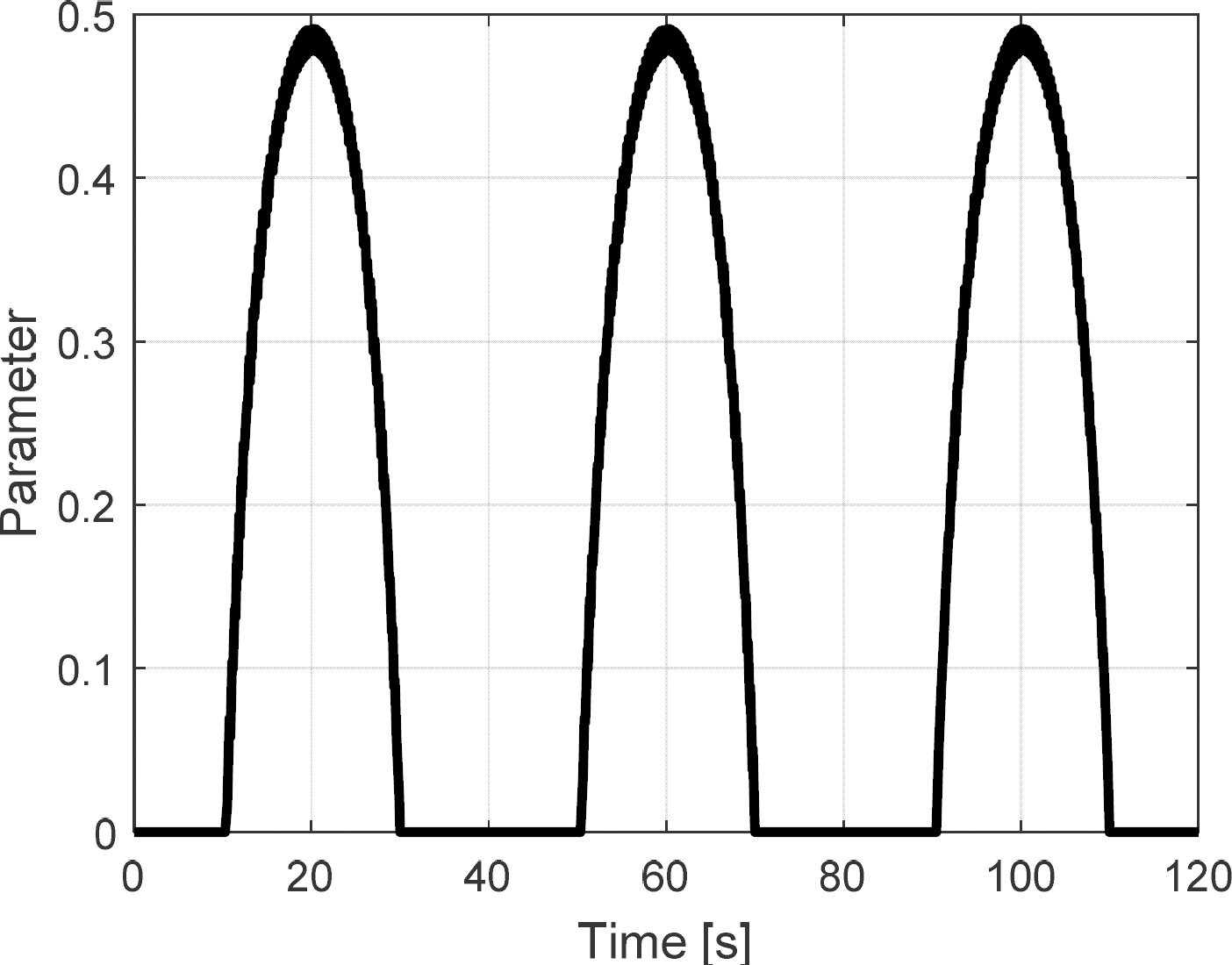

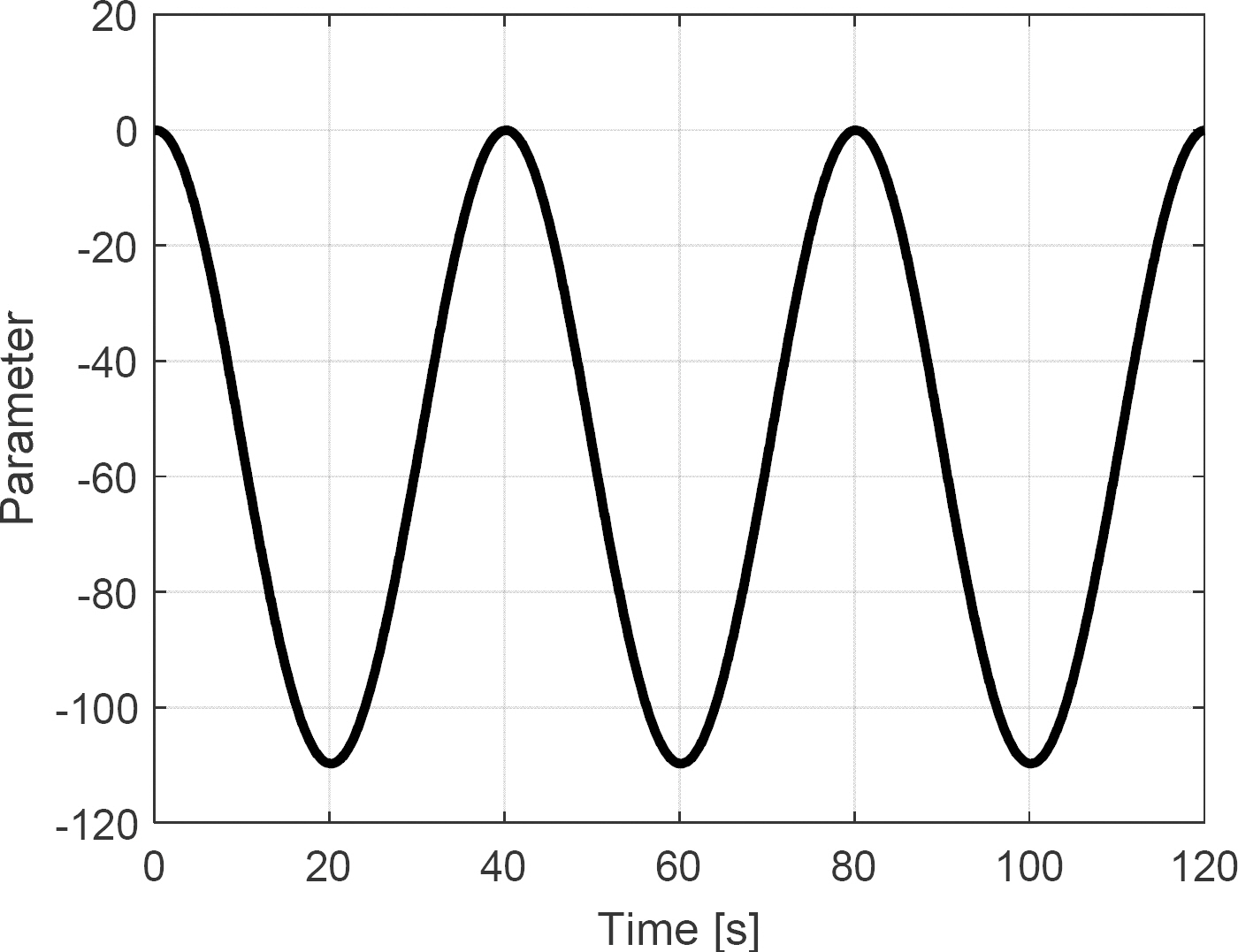
Fig. 21ņØĆ ņĪ░ņĀĢĻ│äņłś ╬▓(k)ļź╝ ĒĢŁņāü ļÄĆĒŹ╝ ņ¦łļ¤ēņØ┤ ļ│Ćņ£äņĀ£ĒĢ£ņØä ļ¦īņĪ▒ĒĢśļŖö Ļ░Æņ£╝ļĪ£ ņØ╝ņĀĢĒĢśĻ▓ī ņĀüņÜ®ĒĢ£ Ļ▓ĮņÜ░(╬▓ = 0.43)ņÖĆ ņĀ£ņĢłĒĢ£ ņĀ£ņ¢┤ļź╝ ļ╣äĻĄÉĒĢ£ Ļ▓āņ£╝ļĪ£, Fig. 21.1ņØĆ ņĀ£ņ¢┤ņä▒ļŖź, Fig. 21.2ļŖö ļÄĆĒŹ╝ņ¦łļ¤ēņØś ļ│Ćņ£äņØ┤ļŗż. Fig. 21.2ņŚÉņä£ņÖĆ Ļ░ÖņØ┤ ļæÉ Ļ▓ĮņÜ░ ļ¬©ļæÉ ņĀäņ▓┤ ĻĄ¼Ļ░äņŚÉņä£ ļ│Ćņ£äņĀ£ĒĢ£ņØä ļ¦īņĪ▒ĒĢśļéś, ╬▓(k)Ļ░Ć ņāüņłśņØĖ Ļ▓ĮņÜ░ ļ│Ćņ£äļŖö ĻĖ░ņ¦äļĀźņØś Ēü¼ĻĖ░ņÖĆ ļ╣äļĪĆņĀüņ£╝ļĪ£ ņ×æļÅÖĒĢśļ®░, ņĀ£ņ¢┤ņØæļŗĄņØĆ Fig. 21.1Ļ│╝ Ļ░Öļŗż. ņØ┤ Ļ▓░Ļ│╝ļŖö ņĢ×ņŚÉņä£ ņØ┤ĒĆäļØ╝ņØ┤ņĀĆļź╝ ņĀüņÜ®Ē¢łņØä ļĢī ņĀ£ņ¢┤ ņä▒ļŖźņØĆ az(k)=╬▓d(k)Ļ░Ć ļÉ£ļŗżļŖö ļČäņäØĻ│╝ ņØ╝ņ╣śĒĢ£ļŗż.
Ļ▓░ ļĪĀ
ĒĢ©ņĀĢņØ┤ļéś ņ×ĀņłśĒĢ© ļō▒ņØś ļ¼┤ĻĖ░ņ▓┤Ļ│äņŚÉņä£ Ēāæņ×¼ļÉ£ ĒÜīņĀäĻĖ░ĻĖ░ņØś ņ×æļÅÖņ£╝ļĪ£ ļ░£ņāØļÉśļŖö ņ¦äļÅÖĻ│╝ ņåīņØīņØ┤ ņÖĖļČĆļĪ£ ņĀäĒīīļÉśņ¦Ć ņĢŖļÅäļĪØ ņĀłņŚ░ĒĢśļŖö Ļ▓āņØĆ ņ▓┤Ļ│äņØś ņĢłņĀäĻ│╝ ņāØņĪ┤ņä▒ņŚÉ ļ¦żņÜ░ ņżæņÜöĒĢśļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ĒÜīņĀäĻĖ░ĻĖ░ļź╝ ņ¦Ćņ¦ĆĒĢśļŖö ļ░øņ╣©ļīĆņØś ņ¦äļÅÖ Ļ░Éņåīļź╝ ņ£äĒĢ┤ ļŖźļÅÖĒśĢ Ļ┤Ćņä▒ļīÉĒŹ╝ņÖĆ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢśņśĆņ£╝ļ®░, ĒŖ╣Ē׳ Ļ┤Ćņä▒ļīÉĒŹ╝Ļ░Ć Ļ░¢ļŖö ņ¦łļ¤ēņØś ņĄ£ļīĆĒŚłņÜ®ļ│Ćņ£äļź╝ ļ¦īņĪ▒ĒĢśļŖö ļ▓öņ£äņŚÉņä£ ņĄ£ņĀüņØś ņĀ£ņ¢┤ ņä▒ļŖźņØä Ļ░¢ļÅäļĪØ ņłśņĀĢļÉ£ Narrow Band FxLMS ņĢīĻ│Āļ”¼ņ”śņØä ņĀ£ņĢłĒĢśņśĆļŗż. ņĀ£ņĢłļÉ£ ņĀ£ņ¢┤ ļ░®ļ▓ĢņØś ĒāĆļŗ╣ņä▒Ļ│╝ ņä▒ļŖźņØä MatLab/Simulinkļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņŗ£ļ«¼ļĀłņØ┤ņģś ĒĢśņśĆņ£╝ļ®░, Ļ▓░Ļ│╝ļź╝ ĒåĄĒĢ┤ ņŻ╝ņ¢┤ņ¦ä ņĀ£ĒĢ£ ņĪ░Ļ▒┤ņØä ļ¦īņĪ▒ĒĢśļ®░ ņÜ░ņłśĒĢ£ ņĀ£ņ¢┤ ņä▒ļŖź ĻĄ¼ĒśäņØ┤ Ļ░ĆļŖźĒĢ©ņØä ĒÖĢņØĖĒĢśņśĆļŗż. ņĀ£ņĢłļÉ£ ļ░®ļ▓ĢņØĆ ņ£Āņé¼ĒĢ£ ĻĄ¼ņĪ░ļź╝ Ļ░¢ļŖö ļŗżņ¢æĒĢ£ Ļ┤Ćņä▒ĒśĢ ļīÉĒŹ╝ ņĀüņÜ® ņŗ£ņŖżĒģ£ņŚÉ ņ£ĀņÜ®ĒĢśĻ▓ī ņĀüņÜ®ļÉĀ ņłś ņ׳ņØä Ļ▓āņØ┤ļŗż.




