



서 론
군에서 운용되는 전술차량은 일반도로뿐만 아니라 전·평시 야지 및 험지를 기동해야하기 때문에 민수용 차량보다 훨씬 가혹한 조건에서 운용이 보장되어야 한다. 이는 보다 높은 수준의 요구 성능과 내구도를 요구하고 있는 주된 이유이기도 하다. 여기서 내구도 란 장비가 고장이나 정지함 없이(기동불가를 의미) 목표 수명 또는 교환시점까지 의도한 기능과 임무수행을 성공적으로 발휘할 확률을 말한다. 따라서 사용군은 해당 장비에 대한 충분하고 신뢰할 만한 시험평가를 거쳐 작전운용성능(ROC; Requirement Of Capability) 기준을 충족시키기 위한 노력이 필요하다[1,2].
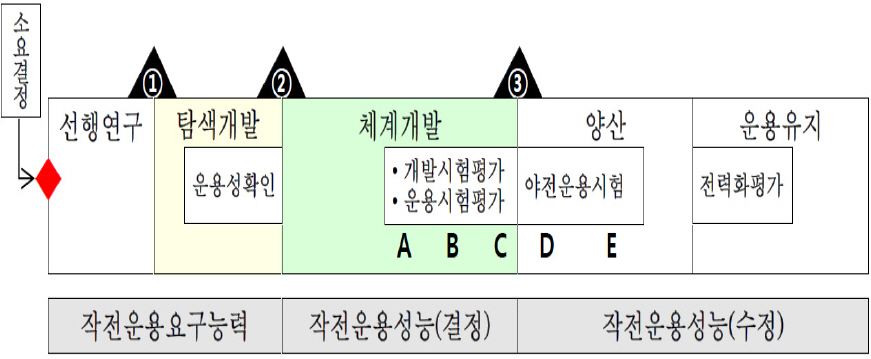
일반적으로 군용장비 또는 무기체계는 개발부터 전력화까지 Fig. 1과 같은 체계적인 개발과정을 거치게 된다. 그림에서 보는바와 같이 체계개발단계에서는 개발시험평가(DT&E, Development Test & Evaluation)와 운용시험평가(OT&E, Operational Test & Evaluation)가 실시되며, 양산단계에서의 야전운용시험(FT, Field Test)를, 그리고 최종 전력화평가를 수행하여 하나의 체계가 전력화된다[2].
개발시험평가(DT&E) 시 국방과학연구소(이하 ADD) 창원 기동시험장에서 총 32,000 km에 대한 각종 주행 시험을 통해 차량의 주요 구성품 내구시험(Endurance test)평가를 실시하며, 운용시험평가(OT&E) 시 다양한 형태의 전술도로와 산악 기동로 또는 다양한 험지에서 차량의 내구도를 평가하는 주행 기동시험 평가를 실시한다. 하지만 국내에서는 개발되는 소형전술차량 또는 각종 차륜형 전술차량에 대한 기동성능 보장을 위해 충분하고 신뢰할 만한 기동시험평가 기준이 정립되어 있지 않아 시험평가 방법과 장소 등이 상황에 따라 상이한 실정이다. 특히 한국 지형에 적합한 대표주행경로 설정은 향후 개발되는 다양한 기동장비의 운용성능 보장 및 수명평가를 위해 반드시 필요하지만 이 또한 체계적인 연구가 미미한 상태이다. 본 연구에서는 기동무기체계의 실제 운용조건에 대한 표준 내구하중을 기반으로 내구모드 최적화 기술 개발을 위해 한국군 작전지역 및 운용환경에 대한 특성을 확인하고, 해외 시험장과 국내 시험장의 환경 특성을 비교하여 향후 대표주행경로 선정을 위한 기초자료를 제공하고자 한다.
기동시험장 특성분석을 위한 접근방법
미군은 일반적으로 군용차량 개발 시 규정된 시험운용절차(TOP; Test Operation Procedure))에 따라 규격화된 시험장에서 다양한 시험평가를 실시한다. 한국군도 마찬가지로 규정에 명시된 절차에 따라 시험평가를 실시하고 있지만 거시적인 방법만 명시되어 있고 세부적인 절차, 방법, 기준에 대해 충분히 연구되어 적용되지 못하고 있는 실정이다. 특히 주행경로 및 시험 코스에 대한 기준이 정립되지 않아 기동장비 개발에 신뢰성을 보장하기 어려운 부분이 있다[3,4].
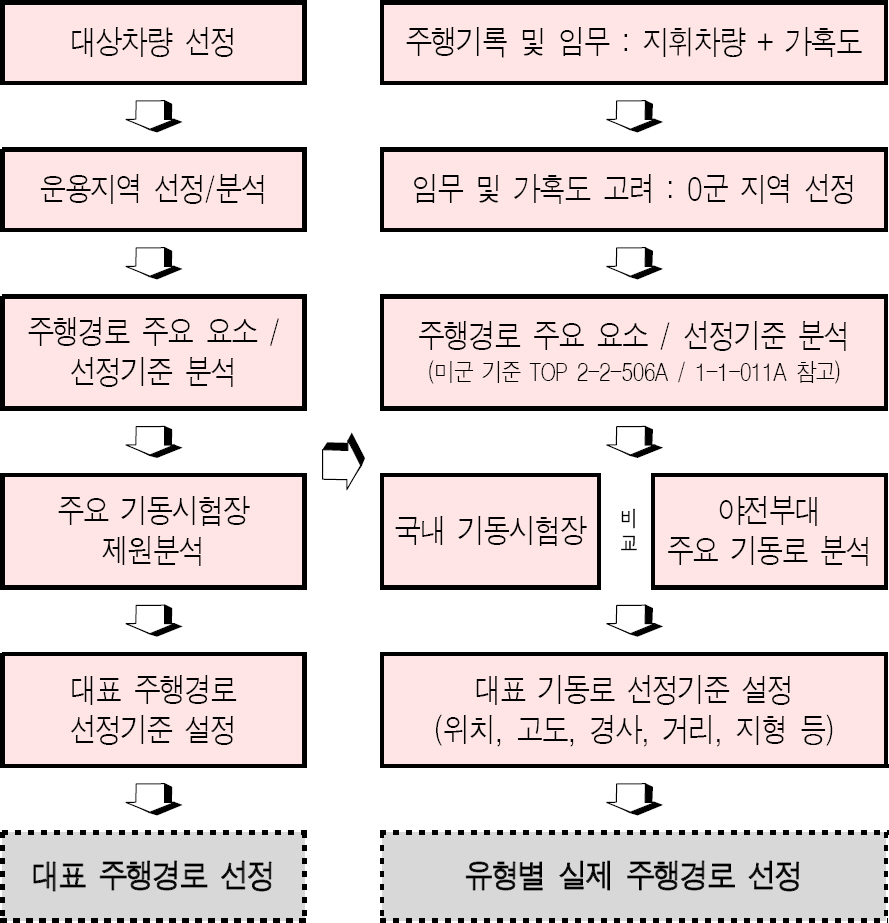
따라서 기동장비 개발을 위해 잘 완비된 미군의 주행시험장 내 지형 형태별, 주행코스별 주행로의 특성을 파악하고 한국군의 시험장과 비교하여 그 차이점을 제시하고자 하며, 야전시험평가 지역의 특성을 비교하여 대표 주행경로를 설정하고자 한다. 이를 위한 접근방법은 Fig. 2와 같다. 전투차량의 임무와 특성을 종합적으로 분석하여 대표차량을 선정하고 운용지역에 대한 지형분석을 통해 수명주기 동안 총 주행거리및 주행경로의 특성을 분석하여 유형별 실제 주행경로를 적용한 대표주행경로를 선정한다.
야전부대 기동조건 분석[5]
3.1 대표차량 선정
대표주행경로 선정을 위한 대상차량은 기존의 소형전출차량의 계열화 기준으로 여단급 이하 지휘차량을 대상으로 선정하였다. Table 1에서 보는 바와 같이 주행관련 정보와 전시 임무 및 평시 다양한 업무 등을 고려하여 우선순위를 판단하였으며 그중 가장 가혹한 환경에 노출되어 있는 지휘차량을 선정하여 주행거리와 사용년수에 대한 주요 특성을 분석하여 대표주행경로 설정에 활용하였다.

3.2 주행거리 분석
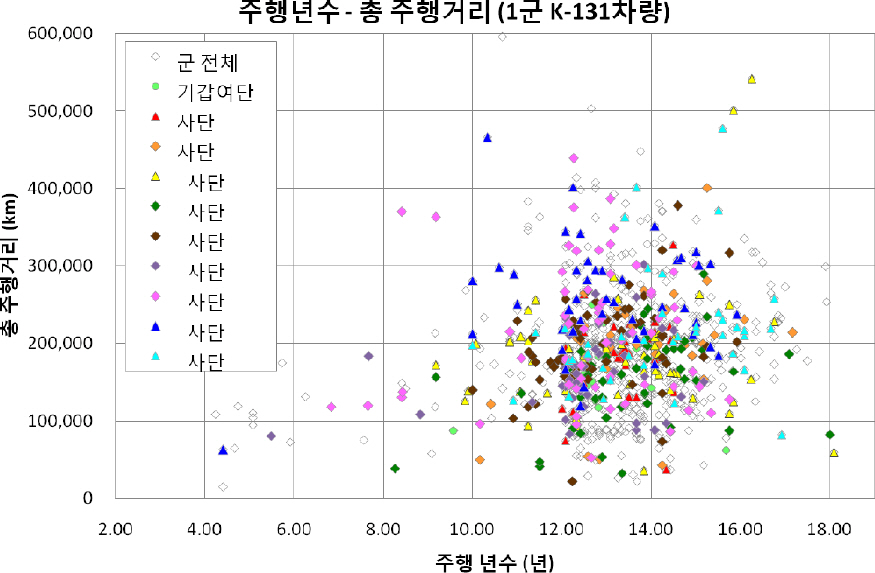
주행경로 선정을 위한 지역은 한반도의 동부와 서부의 지형적 특성을 모두 고려하여 판단해야 하지만전·평시 임무수행의 가혹도나 도로의 경사 및 굴곡 등을 고려 시 동부 전방지역을 선정하였다. 이를 위해 과거 5년간 운용된(′12년부터 ′17년까지) 전투차량(K131; 1/4t 다용도 차량 00대, K-311; 5/4t 화물트럭 00대)의 주행기록을 수집하여 분석하였다. 총 주행거리 및 연평균 주행거리는 Table 2와 Fig. 3에서 보는 바와 같다. 기존연구에서 밝힌 바와 같이 병과 및 부대 고유 임무별 총 주행거리는 연대급 이하 지휘관 차량이 상대적으로 많았으며 수명주기도 짧았다. K-131 지휘전투차량의 경우 평균 사용년수는 13.1년이며, 평균 주행거리는 14,600 km 이다. 특히 주행거리는 지형 특성에 따라 많게는 +70 % ∼ +35 %까지 차이가 있음을 확인하였다. K-311 전투차량의 평균 사용년수와 주행거리는 각각 17.1년, 5,400 km 수준이었다.
시험장 특성 분석 결과
4.1 시험장 주행정보 분석 결과 검증
한국지형에서 전투차량 운용환경은 기존연구[5,6]를 통해 확인하였다. 본 연구에서는 미국과 한국의 주행시험장 및 주행도로 분석을 위한 간접적인 접근방법을 제시하고 한다. 일상생활 속에서 쉽게 접할 수 있는 Google Earth Pro와 TerraExplorer 등을 활용하여 코스별 수치자료와 위성영상을 바탕으로 지형특성 프로파일을 분석하였다. 이는 선진국 전투차량 표준 시험장의 기동로 분석을 통해 국제 표준의 기동시험장 구축과 한국지형 특성을 반영한 대표주행경로 선정을 위한 핵심 자료로 활용할 수 있을 것이다.
해당결과의 정확성을 검증하기 위해 국내 기동시험장에 대한 Google Earth Pro의 위성사진과 지도에 의한 자료 분석 및 실지형의 GPS를 바탕으로 Racechrono 앱을 활용한 측정결과와 비교하였다. Fig. 4는 실지형 데이터 획득을 위해 사용된 10 Hz 속도 및 가속도 측정장비와 헨드폰에서 활용 가능한 GPS 기반의 Racechrono 앱을 보여준다.

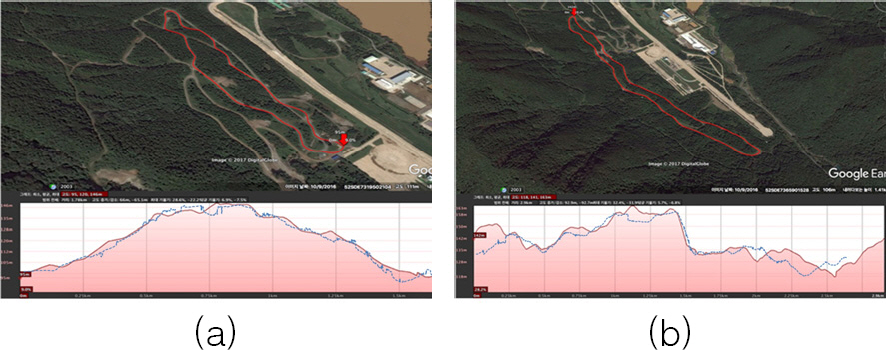
Fig. 5는 00과학연구소 00 기동시험장의 코스별 지형정보 데이터를 보여준다. 그림에서 보는바와 같이 비포장 도로(Secondary road)와 거친 비포장 도로(Trail/ Rough-Trail) 기동시험 코스에 대한 Google Earth Pro, TerraExplorer 결과와 GPS장비에 의한 실 측정 데이터를 비교하였다. 코스에 대한 형태(Type), 거리, 고도, 평균 경사도 등이 유사함을 확인하였다.
4.2 시험장 주행정보 분석 결과
4.2.1 국내 기동시험장 지형특성 분석
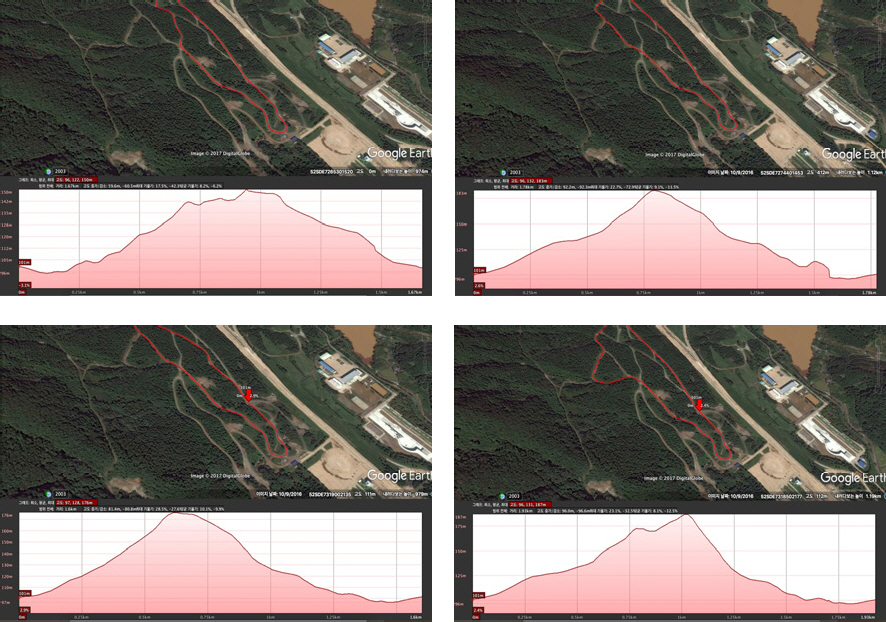
국내 기동시험장의 주행경로를 동일한 방법으로 분석하였다. Fig. 6과 Fig. 7에서 보는 바와 같이 00기동시험장은 포장, 비포장, 대표 야지 기동로와 기타 야지기동 G1∼G4코스로 구성되어 있다. Table 3에서 주요 지형정보를 종합하였다. 포장도로는 직선시험로이며 경사도 01 %로 지형 데이터 프로파일에서 제외하였다.
Table 3.
ADD test course profiles by topography

4.2.2 국외 기동시험장 지형특성 분석
미군의 주행시험은 TOP 2-2-506A에 기술된 것처럼 ATC(Aberdeen Test Center) 또는 YTC(Yuma Test Center)의 시험코스에서 차량별 적정 코스조합(Road Course Test Matrix, RCTM)으로 시험평가를 실시한다. 주행경로의 형태 및 특징에 따라 Table 4와 같이 포장도로(Primary road), 비포장도로(Secondary road), 거친 비포장도로(Trail/Rough Trails), 야지(Cross-Country) 등 4가 지로 분류하고 주행 형태별 적정 조합을 제시하고 있다. 그러나 코스별 정확한 프로파일과 경사도, 기복 등이 TOP 1-1-011A에는 기술되어 있지만 공개되어 있지 않기 때문에 본 연구에서는 ATC 시험장 위주로 지형특성 프로파일을 분석하였다[6–10].
Table 4.
ATC test course profiles by topography
미국 내 지형에 대한 수치지형 정보를 직접 획득하는 것이 제한되므로, Google Earth Pro의 수치자료와 위성영상을 바탕으로 TOP에 명시되어 있는 주행시험로(코스)를 도시하고 프로파일을 추출하였다. 그러나 주행시험 코스의 방향 등에 대한 정보가 제한되어 임의 방향으로 프로파일을 도출하였고, 경사도가 “-” 인 경우는 이동방향에서 내리막길을 나타내며, 최대/평균 기울기에서는 절대값으로 표현하였다. 주행로 형태별 주요 지형특성 프로파일은 4가지 특성에 따라 다음과 같이 분석하였다.
4.2.2.1 Primary Roads
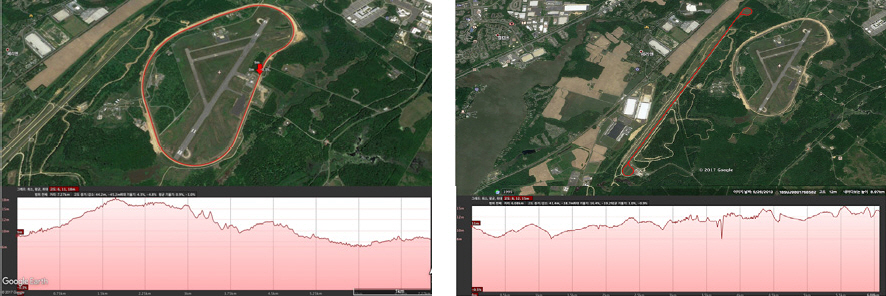
ATC 시험장내 Primary road에 대한 지형 프로파일은 Fig. 8과 Table 5에서 보는 바와 같이 ATEF와 Perryman 시험장의 포장도로 정보를 분석하였다. 시험장 길이는 약 6∼7.2 km 규모이며 고도는 평지에 가깝고 직전 또는 루프로 형성되어 있다.
4.2.2.2 Secondary Roads
ATC 시험장내 Secondary road에 대한 지형 프로파일은 Fig. 9와 Table 6에서 보는 바와 같이 Munson, Perryman, Chruchville 시험장의 정보를 분석하였다. 시험장 길이는 약 2.4∼3.9 km 규모이며 Primary road에 비해 다소 복잡하며 전체 루프형태로 회전구간이 많이 형성되어 있다.
Table 6.
Secondary roads course
4.2.2.3 Trail/Rough Trail course
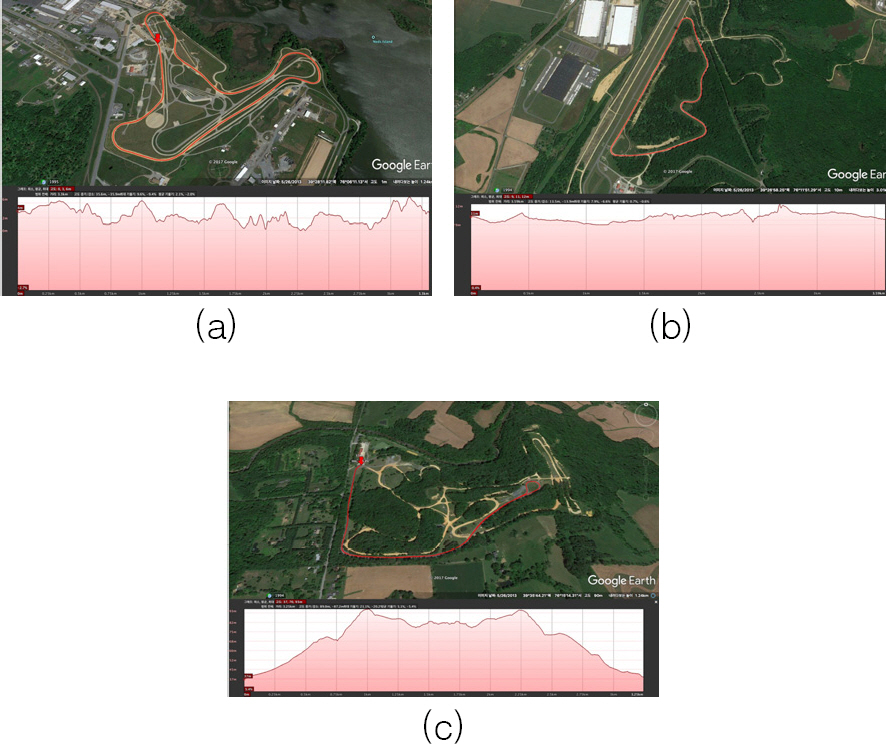
Trail/Rough trail 코스에 대한 지형 프로파일은 Fig. 10과 Table 7에서 보는 바와 같이 Perryman과 Churchville 시험장의 지형정보를 분석하였다. 주로 전투용 대형차량 시험장으로 루프형태의 2.9∼8.4 km 규모이며 복잡한 회전구간을 갖는다.
Table 7.
Trail/Rough Trail course

4.2.2.4 Cross-Coutry course
Cross-Country 코스에 대한 지형 프로파일은 Fig. 11과 Table 8에서 보는 바와 같이 Perryman 시험장의 지형 정보를 분석하였다. 시험장 길이는 약 4∼5.4 km 규모이다.
Table 8.
Cross-Coutry course

4.2.3 작전지역 전술 기동로 지형특성 분석
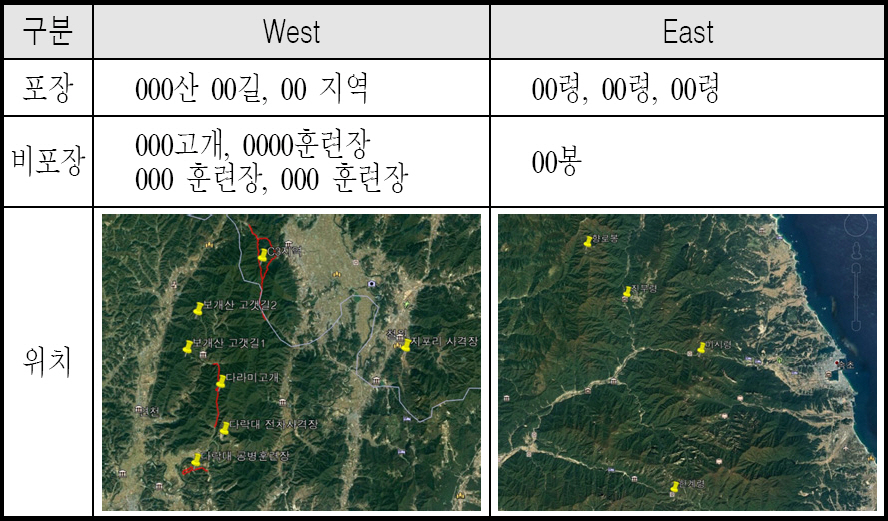
국내 시험평가는 개발, 운용, 야전, 전력화 시험평가 등이 있다. 이러한 평가는 기관에 따라 각기 다른 지역에서 이루어지는 경우가 일반적이다. 따라서 시험평가 지역에 대한 상세한 정보가 체계적으로 관리되지 못하고 있고, 시험평가 결과에 시험조건, 기상, 주행 데이터 등에 대한 정보가 정량화 되지 못하고 있다. 이러한 이유로 지형 가시화 프로그램 및 수치지형정보 등을 활용하여 야전 시험평가 지역에 대한 주행경로 정보를 분석하였다. Table 9는 육군의 야전시험평가지역을 보여준다. 동부축선과 서분축선에서 운용되는 주요 기동로이며 포장도로와 야지(Trail/Rough Trail)로 구분된다.
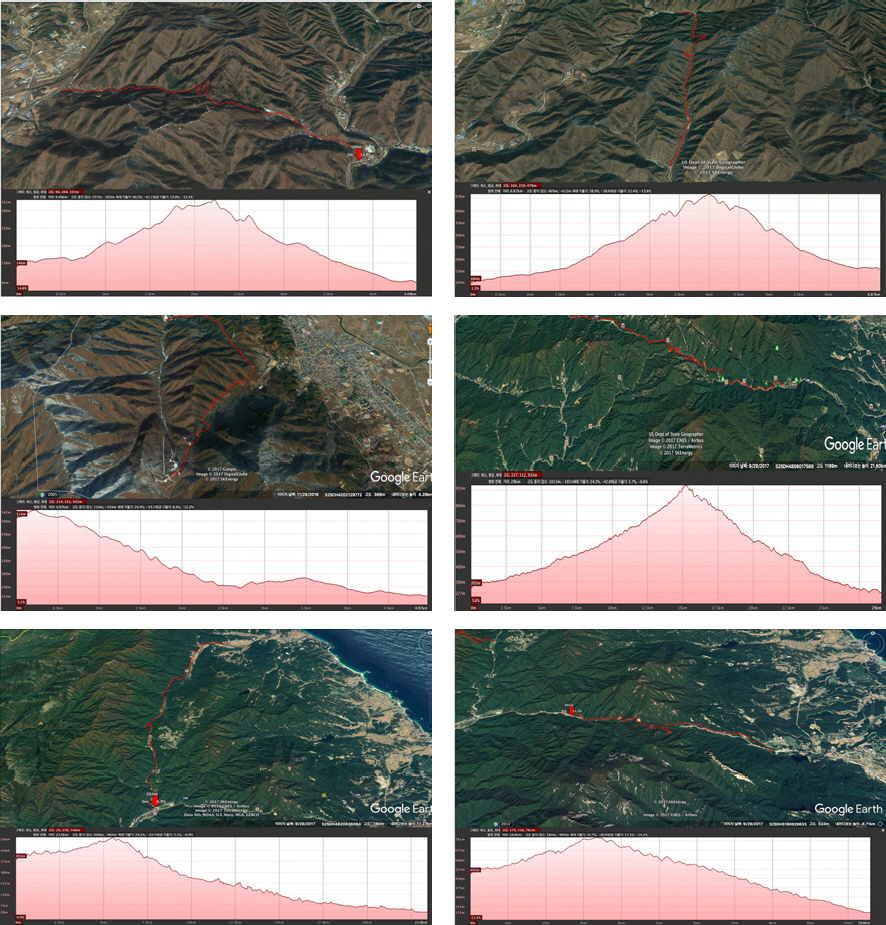
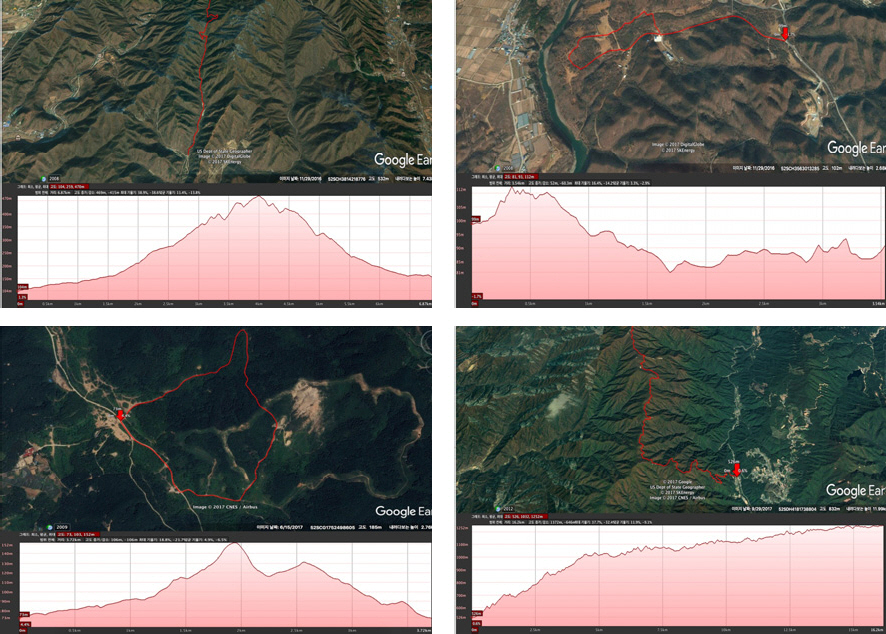
4.2.3.1 포장도로 지형특성 분석
Table 10과 Fig. 12는 우리 군이 활용하고 있는 야전 기동시험장으로 포장도로에 대한 분석 결과를 보 여준다. 지형 프로파일은 왼쪽 위부터 Table 12 순서대로 나타내었다.
Table 10.
Army field paved course areas
4.2.3.2 거친 비포장도로(Trail/Rough Trail) 지형특성 분석
Table 11.
Army field Trail/Rough Trail course areas
4.3 주행정보 비교분석(종합)
지형정보 프로파일을 분석한 결과를 Fig. 14에 종합하여 나타내었으며, Fig. 15는 국내 시험장의 경사도와 고도차를 보여준다. 그림에서 알 수 있듯이 낮은 단계에서부터 높은 단계까지 매우 다양하게 분포되어 있음을 알 수 있다. 미국과 한국의 기동시험장 평균경사도와 고도차에 대한 분포를 비교한 결과이다. 전투차량 내구시험을 위한 주행시험장은 다양하지 않지만 기동시험에 대한 조건은 미국보다 가혹한 환경에서 이루어지고 있음을 확인할 수 있다.
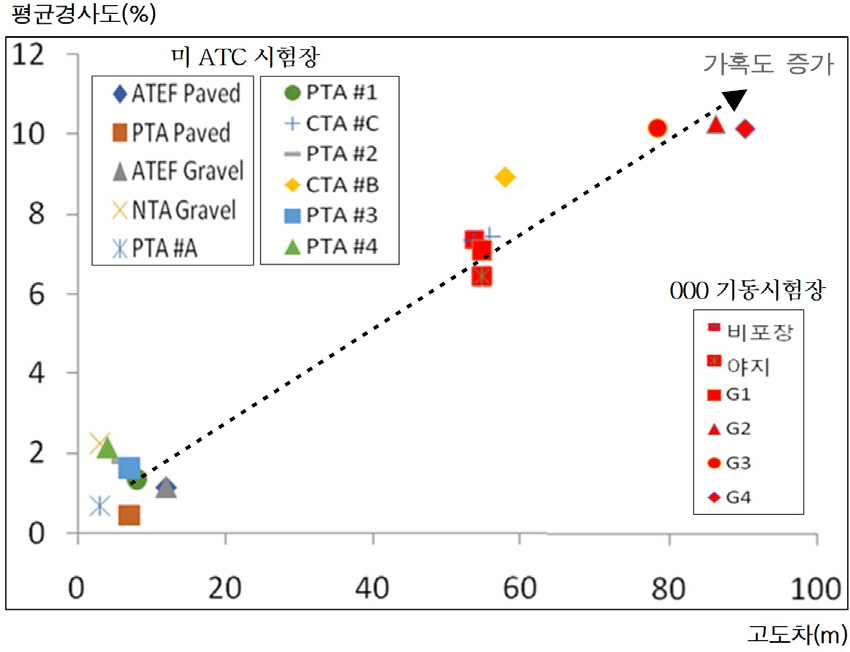
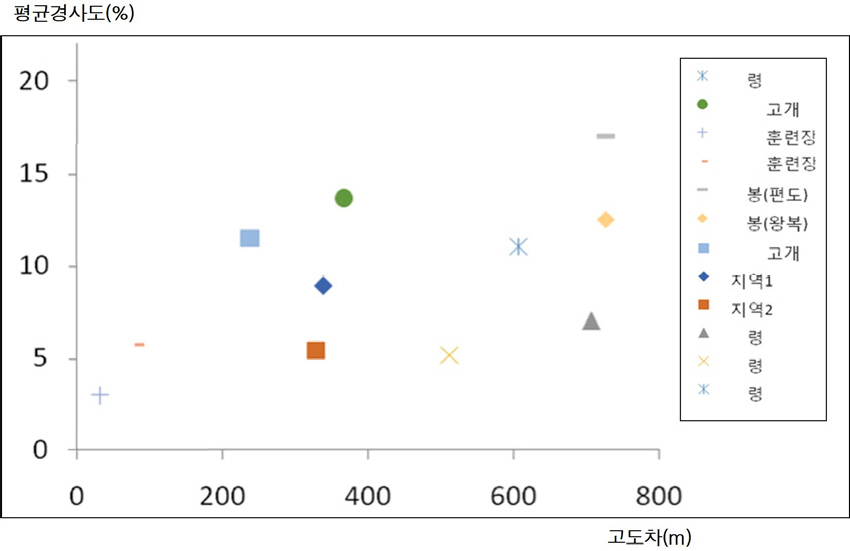
미군의 ATC와 국내 기동시험장 그리고 국내 기동장비 시험평가 주행로의 데이터를 종합하여 비교해 보면, 미군에서 운용중인 4가지 도로 타입에 비해 국내에서 운용 중인 기동시험장과 주행시험로가 고도의 증/감, 기울기 등이 크고, 다양하고 복잡한 도로로 구성되어 운용되고 있음을 알 수 있다. 이러한 비교를 통해 대표주행경로 선정하는데 갖추어야 할 기본 지형정보를 도출할 수 있을 것이다. 또한 도로의 종류는 미군에서 포장, 비포장, 거친도로, 야지 등 4가지로 구분하는데 반해 국내 기동시험장은 포장, 비포장 그리고 야지로 구분하여 운용하고 있다. 야전 주행시험평가 지역의 경우 포장도로와 거친 비포장도로로 구분하여 운용 중이다. 대한민국은 산이 많고, 수풀이 우거진 지역에서 작전을 많이 수행하는 만큼 차량의 임무에 따라서 다양한 도로 특성을 반영한 기동로를 선정해야 할 것이다.




