무장데이터링크 메시지를 이용한 기동표적 타격평가 연구
Study of the Bomb Hit Indication of Moving Target Using Weapon Data Link Message
Article information
Abstract
The Network-Centric warfare over weapon data link networks has been developed for the recent decade. Since the US navy had begun to develop tactical digital information chain, it has gradually transformed into weapon data link technology. As data link network system and its protocol have been advanced into high-technology, focusing and targeting on moving targets become possible in net-enabled environments. However, it is difficult to identify the primary information from numerous battlefields and understanding approaches to damage a target in a timely manner. In this paper, to better understand the targeting assessment, we suggest a specific solution: Bomb Hit Indication(BHI) using information in weapon data link messages. In order to prove our suggestion, we implement the BHI solution and apply it into the weapon data link integrating system.
1. 서 론
네트워크 중심 전(NCW)으로 무기체계 발전방향의 변화에 의해 단일 유도무기를 제어하는 과거의 운용방식에서 다수의 유도무기에 대한 실시간 제어가 가능해지고, 표적을 타격 직전까지 실시간 상황정보를 공유함으로써, 이동표적에 대한 정밀타격 능력을 향상 시킬 수 있게 되었다. 현재 개발 중인 네트워크 기반 무기(NEW: Network Enabled Weapon)의 무장데이터링크 네트워크는 기존에 존재하는 전술데이터링크를 기반으로 기존 무장의 표적 정밀조준, 재교전 등의 능력을 개량하는 방식으로 진행 중에 있다. 미국의 경우 군사표준서에 NEW에 관한 메시지 송수신 규약을 규정하고 있다[1].
무장데이터링크(WDL: Weapon Data Link) 메시지는 유도탄상태정보(WIFT: Weapon In-Flight Track)나, 표적정보 갱신(IFTU: In-Flight Target Update), 비행 중 표적 재 교전(Retarget), 통제권 이양(Hand over), 타격평가(BHI: Bomb Hit Indication)의 기능이 필수적으로 포함되어 주기적으로 송신되는 정보이다[2].
영상기반 타격평가 시스템[3]에 비하여, WDL 메시지 정보를 기반 한 타격평가는 지연시간 발생과 데이터 손실이 거의 없다는 측면에서 다수의 작전 참여자들에게 표적의 피해정도에 대해서 실시간 공유가 용이하다. 그러나 현재 무기체계에서 타격평가로 제공되는 BHI혹은 BDII(Bomb Damage Imagery Indication)정보 활용에 따르면, 전문 기관이나 인력을 늘림으로써 무기체계의 표적 상황정보 및 Seeker 영상 등에 대한 직관적 분석 자료를 바탕으로 표적 타격정도를 추정하는 것으로 나타났다[4,6].
한편 Scott R. Frame의 연구논문에 따르면, 네트워크 기반 무기체계에서 WDL IFTU 메시지 활용을 위한 데이터 처리방법이나 과정에 대해서는 논의가 있었으나, WDL 메시지 정보를 이용하여 타격평가로 어떻게 활용할 것인지에 대한 구체적인 방안은 제시되지 않았다[5,6]. 반면 표적 타격확률에 대한 수학적 이론과 폭넓은 연구가 지속적으로 수행되고 있으나[7,8], 무기체계의 상황정보를 실시간으로 적용함으로써 재교전의 판단근거로 활용하는 데에 있어서는 지금까지 구체적인 방안에 대한 관련 연구가 미비한 편이다[9]. 따라서 본 논문에서는 NEW로부터 전송된 데이터를 신속한 재교전의 판단근거로 활용하기 위해 타격평가에 활용될 WDL 메시지에 대한 분석을 수행한다. 또한 WDL 메시지로 수신된 센서 오차, 표적의 방향성 오차 및 속도 데이터 등을 활용한 타격평가 모델을 설계하고, 다양한 전장상황 모의가 가능한 무장데이터링크 통합시스템을 활용하여 표적 타격예측 운용가능 여부를 확인한다.
2. 본 론
2.1 NEW 타격평가 입력변수
이 절에서는 NEW의 여러 가지 전장 시나리오 중에서 발생 가능한 변수를 고려하고, 타격평가 소프트웨어에서 처리해야 할 변수들을 정의한다. Fig. 1은 네트워크 중심 전에서 NEW 타격평가 시나리오를 묘사한 개념도이다. NEW는 지상관제시스템(GCS: Ground Control System)과 중계기(Network participants)로 부터 메시지 송수신 절차와 규약에 따라 표적정보를 수신하고, BHI와 WIFT 정보를 송신한다. WDL을 통해 NEW에 전송되는 메시지 중에서는 센서가 수집한 정보를 전달하는데, Seeker가 표적 주변에서 관측되는 주변객체(Contact) 정보를 포함한 것이다. Seeker의 FOV (Field of View)상에 표적이 존재하더라도, Contact 정보로 인하여 오포착하는 경우가 존재한다[10]. 그러므로 Contact 정보는 임무성공확률에 직접적인 영향을 미치기 때문에 타격평가에 중요한 변수로 볼 수 있다. 현재 WDL에서는 NEW로부터 표적 주변의 객체에 해당하는 Contact 정보를 전송할 수 있게 되어 있으며, 표적을 기준으로 거리(range)와 각도(bearing)데이터를 전송한다.

Network enabled weapon BHI concept scenario
타격확률 산출에 주요 파라미터로써 원형공분산오차(CEP: Circular Error Probable)는 무기체계의 성능지표라고 볼 수 있으며, 그 무기체계의 명중률 정확도 지수로 사용된다. CEP는 무기체계가 조준하고 있는 표적으로부터 떨어진 거리(Miss Distance)를 통계적 수치로써 CEP90% 혹은 CEP50%로 나타난다. CEP50%는 표적의 중심으로부터 탄착점 50 %가 모여 있는 거리를 의미한다[11]. NEW 상태정보가 포함된 WIFT 메시지의 Seeker Acquisition Status 필드에서는 CEP 90 % 이상을 기준으로 전송되며[12], 본 논문에서는 이를 NEW 조준점의 오차 정보로 활용한다.
IFTU 메시지는 NEW가 이동 중인 표적을 타격할 수 있도록 표적정보를 주기적으로 제공하는데, WDL에서 NEW에 IFTU 메시지로 전송되는 데이터에는 표적 위치오차 정보로 활용되는 TLE(Target Location Error) 데이터가 있다. 이는 특히 기동표적 표적타격 평가에 있어 CEP 만큼 주요한 성능지표로 볼 수 있다.
TLE는 센서 성능에 따라 최소 수십에서 최대 수천 미터까지 될 수 있으며, 공대지(Air-to-ground) 표적에 경우 TLE가 10 m 이하일 때, 표적 타격 유효성이 알려진바 있다[13]. TLE 정보에는 표적 방향오차, 장∙단축 오차 정도로 파악되며, IFTU 메시지로 전송된다. 이는 타격확률 수학적 모델 변수로 표적 위치 불확실성 영역 산출에 이용한다.
타격평가 프로그램에서 사용되는 메시지 필드와 단위를 요약하면 Table 1과 같다. 타격평가 프로그램은 NEW 메시지를 타격평가 확률로 구현하기 위해 메시지 필드 값을 타격평가 소프트웨어의 입력 변수로 정의하였으며, 해당하는 메시지가 전송될 때마다 타격확률을 계산한다. Target Location Error Direction 필드는 NEW 진행방향을 기준으로, 진북방향에서 벌어진 표적 진행방향에 해당되는 각도이다. Target Location Error Major/Minor 필드는 표적의 불확실성을 나타내는 타원 영역의 표적 진행방향과 직교하는 장∙단축 거리이다. Target Time To Go 필드는 NEW가 표적 타격까지 남은 시간이며, Target Velocity North/East 필드는 표적속도의 벡터 값이다. 본 논문에서는 조준점 및 표적 위치에 해당되는 Latitude/Longitude필드를 위도(x좌표), 경도(y좌표) 좌표 값으로 설정하였다.
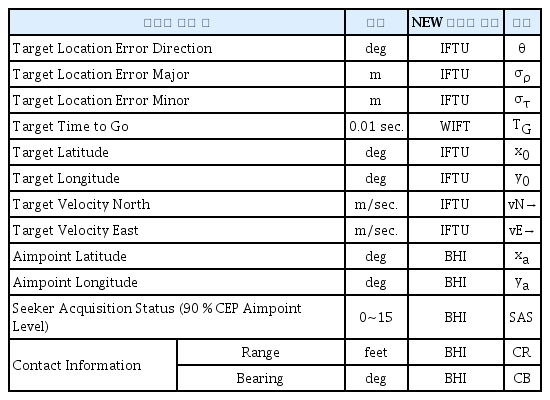
Summery of message field information
한편, Seeker의 성능지표(SAS: Seeker Acquisition Status)인 CEP90%는 0~15 단계로 나뉘어져 있으며[12], 지표가 높을수록 CEP 오차가 낮고 타격이 정밀한 것으로 볼 수 있다. 프로그램 구현에서는 SAS지표에 따라 해당 CEP90% 값을 출력하도록 설계했으며, NEW에 관한 CEP90% 출력 형태는 Table 2와 같다. Contact Range/Bearing 필드는 NEW의 센서에서 관측된 표적 외에 탐지된 객체 정보로써 표적을 기준으로 떨어진 거리와 표적 진행방향 기준으로 벌어진 각도 값으로 정의한다. 타격확률을 산출하기 위해서는 WDL로 입력되는 메시지 정보 이외에도 사전 표적 정보 및 NEW의 성능 정보가 요구되며 해당요소에는 Table 3과 같다. Target Size Horizontal/Vertical 필드는 표적의 가로세로 길이다. CEP90% 값은 Seeker가 없는 NEW의 경우, 혹은 SAS가 7 미만의 경우에 대하여 조준점 오차 설정 값으로 사전정보에 포함된다.
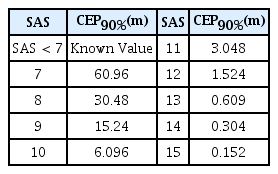
Seeker acquisition status output

Programing assumption: known information
2.2 타격평가 모델 설계 및 시스템 적용
본 절에서는 타격평가 모델 설계와 이를 구현하기 위해 WDL로 입력되는 메시지 정보와 주어진 사전정보를 바탕으로 타격확률에 대하여 기술한다.
2.2.1 타격평가 모델
타격평가 모델은 탐색기 센서 영상으로부터 전송되는 정보를 기반으로 가우시안 확률 함수를 이용하여 표적 타격 확률과 Contact 타격확률을 계산하였다. 본 논문에서 제안하는 표적은 2차 평면에서 기동하는 지상표적을 대상으로 한다. 타격평가 모델은 NEW가 WDL을 통해 전송해주는 SAS 정보를 실시간으로 반영하여 타격확률을 예측한다. Fig. 2는 NEW에 탐색기를 통해 바라본 수평단면의 예를 보여주고 있다. Seeker의 FOV와 표적정보를 도시화 한 것으로, 표적위치 오차와 조준점 오차로 인하여 실제 표적지점과 조준점의 거리 차이(Miss Distance)를 나타낸다. Fig. 2에서는 표적의 위치에 대한 센서 오차를 TLE Ellipse 크기로 나타냈으며, NEW 조준점 오차는 CEP90% 크기로 표현하였다.
NEW seeker ground field of view
표적 정보와 함께 메시지로 전송되는 Contact 정보에 대해서는 WDL에서 해당객체의 크기(Size) 정보가 제공되지 않기 때문에[12] Contact로 인한 오포착은 조준점과의 거리정보를 기준으로 타격확률을 계산한다.
본 논문에서 Contact의 크기는 표적의 크기와 동일하다고 가정한다. Fig. 3은 NEW 조준점(xa, ya)을 기준으로 Target Time to Go 시점에 표적위치(xtgo, ytgo) 오차를 X-Y 좌표계에 나타낸 것으로 표적의 크기를 가로 Hr, 세로 Vr로 정의하였다. 이때 Target Time to Go시점에서 표적 위치모델은 다음 식 (1)과 같다.
Graphical illustration of elliptical TLE for target location
Table 1에서 제시한 변수 NEW 조준점, 표적위치, 표적 위치오차(σp, σT) 및 표적 방향오차 θ는 WDL 메시지를 통해서 전송되는 데이터이다. X-Y 좌표계에서 TLE 타원의 회전각 α(90-θ)기준으로 X’-Y’좌표계로 변환 시 축으로 xa, y 축으로ya 만큼 이동하면, 변환된 표적좌표는 다음 식 (2)와 같으며 xa와 ya는 기준원점이 된다. 이는 좌표축의 변환으로 결합 확률분포인 타원형의 표적 방향오차 적용 시에 발생하는 표적 위치오차의 상관계수인 공분산 계산이 생략됨에 따라 연산의 복잡성을 낮출 수 있게 된다.
여기서 표적의 위치가 조준점과 일치하게 되면, 표적의 위치는 조준점 좌표가 되고 확률분포는 다음 식 (3)과 같다.
이때, 표적의 손상면적은 표적 크기와 비례하고, NEW의 크기와 함께 고려하게 되면 VN=Vr+NL이고, HN=Hr+NL이다. 따라서 탄두로 인한 표적타격확률(ψT(xa,ya, Target Hitting Probability)은 다음 식 (4)와 같이 정의할 수 있다.
CEP90% 값이 주어질 때 조준점의 위치오차 공분산을 σa라고 하면, CEP90% = 1.1774σa에 의해서 조준점의 공분산값을 구할 수 있다[14]. 따라서 조준점 위치에 해당되는 NEW의 탄착지점 확률함수는 결합 가우시안 분포 확률 식에 의하여 다음과 같다.
여기서 x0와 y0는 NEW의 조준점 평균값이며, 식 (3)에서는 조준점이 실제 표적으로부터 떨어진 거리가 된다. 실제 조준점과 표적위치의 차이는 조준점 기준으로 x′축에서
한편, 본 연구에서 NEW 센서에서 관측된 Contact 정보에 대해서는 표적정보와 다르게 방향 오차정보가 반영이 되지 않음에 따라, Contact 타격확률은 표적사이의 거리(Range)와 표적을 기준으로 벌어진 각도(Bearing)를 이용하여 타격확률을 산출하였다. Contact 와 조준점으로부터 거리는 Fig. 4에서와 같이 나타낼 수 있다. 조준점이 NEW의 타격 예측지점으로써 이를 원점으로 보면, A(Aimpoint)로부터 C(Contact Point)와 T(Target Point)사이의 거리는
Guidance geometry for contact range from aimpoint
위의 식 (7)은 코사인 법칙에 따라서 다음 식 (8)~(11)과 같이 유도할 수 있다.
식 (8)~(11)로부터 Contact의 타격확률(Pc)은 다음과 같이 나타낼 수 있다.
여기서, ψC는 탄두로 인한 Contact 타격확률로써 다음 식 (13), (14)에 의해 정의된다.
Contact 타격확률은 식 (12)에 의해서 구할 수 있으며, 식 (12)에서 f(w, z)는 식 (5)와 동일하다. 여기서 조준점과의 거리 차에 해당되는 x0=xCT이고, y0=yCT가 된다.
2.2.2 타격평가 모의환경 시스템 적용
무장데이터링크 통합 시스템(WDL Integration System)은 크게 WDL 기반의 네트워크 유도탄 원격통제를 위한 메시지 처리기능, 네트워크 관리기능, 전장효과 분석기능이 있다. 이는 운용자 인터페이스 환경을 시연 및 분석 위한 운용환경을 제공하기 위한 것으로서 시스템은 기능적 요구사항을 반영한 무장데이터링크 네트워크 모의시스템(WDL Network Simulation System), NEW 모의시스템(NEW Simulation System), NEW의 지상관제모의시스템(Ground Control System, GCS)으로 구성된다[15].
시스템 내부의 데이터의 흐름은 Fig. 5와 같다. 무장데이터링크 통합시스템의 사용자는 임무생성기를 통해(Mission Control Unit) 명령을 전달하면, 가시화 장비에서(Virtual Environment Simulation) 임무에 대한 시나리오를 가시화 하여 상황을 도시화하고, WDL 데이터 통신모듈(Data Link Operation)을 통해 주기적으로 NEW에 IFTU 메시지를 전송한다. 여기서 타격평가 소프트웨어(Targeting Evaluation SW)는 GCS의 타 격평가 모듈로써의 NEW에 탑재된 Seeker등의 센서로 부터 획득한 BIH 정보를 처리하여 정밀한 타격평가 결과를 분석 처리한다. Fig. 6은 무장데이터링크 통합 시스템에서 지상관제 시스템의 임무통제기(Mission Control Unit)에 해당하는 운용자 화면을 전시한 것이다. 운용자는 이를 통해 경로생성과 임무통제가 가능하다. 타격평가 소프트웨어는 표적타격이 완료 전까지 입력된 메시지 정보를 처리하여 타격확률을 실시간으로 산출하며, 동시에 Seeker에서 전송되는 상황정보를 통해 임무통제기에서 전시상황이 예측됨에 따라 통합시스템 운용자는 임무수행 완료 및 교전을 재시행 할 수 있다.
WDL integrated system operating strategy
Mission Control Unit in ground control system
Fig. 7은 모의시나리오 상에 표적에 대한 NEW 일대일 교전에 타격 결과를 나타낸 것으로, 운용자 화면에는 타격평가 소프트웨어에서 처리한 표적 및 Contact 타격확률이 전시된다.

BHI result display in ground control system
3. 실 험
3.1 모의실험 환경
이 장에서는 2장에서 설계한 통합 시스템통합 내부에서 동작하는 표적 타격평가 모델을 대상으로 가상 시나리오를 설정하여 실험한 결과를 제시한다.
모의실험 환경에서는 표적 모델의 가로 세로 크기 및 속도 값은 일반적인 지대공 발사대(TEL: Transporter Erector Launcher)를 기준으로 설정하였으며[16], NEW 길이에 해당하는 NEW Length 선정기준에는 미국의 Tomahawk Missile(Block IV, 2004)의 제원을 대상으로 하였다.
실험에서는 WDL을 통해 NEW로부터 BHI 메시지로 조준점(Aimpoint)이 송신되며, IFTU 메시지로 표적위치오차 및 표적 방향오차를 NEW로 전송하는 것을 가정하였다. 또한 NEW의 BIH 메시지로부터 전송되는 SAS 지표는 10, 11 단계를 설정하였으며, 표적의 주변 객체에 해당되는 Contact 정보는 표적으로부터 20 m 거리에 표적 진행방향으로부터 15도 떨어진 위치를 가정하여 실험값으로 설정하였다. 모의실험에 적용된 변수는 Table 4와 같다.

Simulation parameter
3.2 모의실험 결과
타격평가 소프트웨어는 표적 위치와 조준점의 위치에 거리에 대한 확률밀도함수를 기반 한 것으로 거리의 차이가 클수록 타격확률 값도 떨어지게 될 것을 예상할 수 있다. 또한 위치 오차 및 조준점의 오차가 작을수록 타격 확률이 증가할 것으로 예측이 가능하다.
Table 5는 본 논문에서 제시한 타격평가 소프트웨어에서 Table 4의 WDL 입력변수에 따라 NEW의 표적 타격을 예측한 결과이다. 실험에서는 조준점 및 표적 진행방향에 따른 표적방향오차, 표적 위치 오차조건을 달리하며 비교실험을 수행하였다.
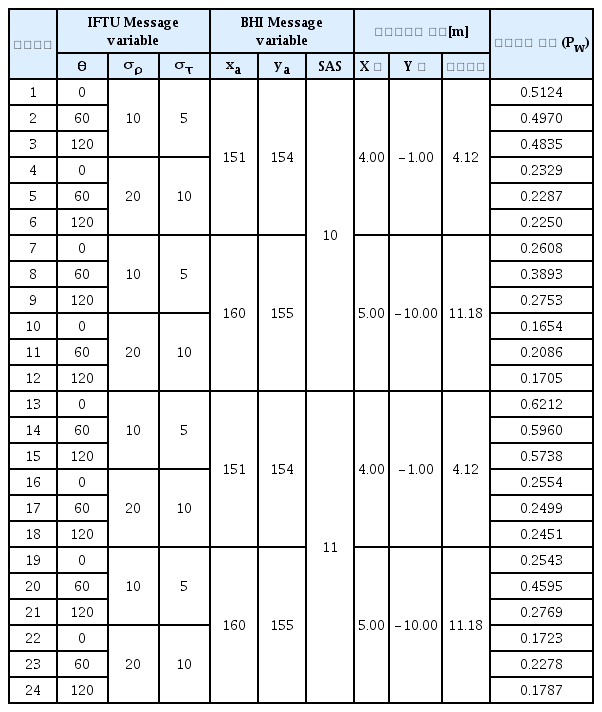
Simulation results of the target HIT probability
Table 6은 실험번호 19, 20, 21에 해당되는 입력변수 조건에서 수행된 Contact의 타격확률에 대한 실험결과이다. NEW의 Seeker에서 주변객체를 표적으로 오인하여 타격하게 되는 가능성을 본 논문에서 제시한 타격평가 식 (13), (14)을 적용하여 예측한 것이다.

Simulation results of the contacts HIT probability
Fig. 8은 MATLAB Simulink 도구를 이용하여 Table 5와 Table 6의 실험결과에 대한 검증을 위해 실험번호 19번, 20번 21번에 해당하는 표적과 Contact, 조준점 위치에 따른 확률분포를 나타낸 것이다. 여기서 표적의 위치오차의 장축(σρ)과 단축(σT), 조준점(xa, ya)은 동일하며, 표적 방향오차(θ)만 바꿔서 나타난 결과이다. 2D 평면도의 Yellow Box는 표적크기와 NEW의 크기를 고려한 표적 손상 면적을 나타낸 것으로 19.3 × 9.3 m2 이다. 이때, Contact의 손상면적은 표적의 손상면적과 동일한 것으로 가정한다.
Simulation result of test number 19, 20, 21
Table 5의 실험조건에 따라 표적의 진행방향으로 인하여 Fig. 8의 2D 그래프에서 나타나는 표적 손상 영역이 조준점의 예상위치 분포와 접근 정도를 비교하였다. 실험번호 20번에서는 표적 방향오차가 조준점 방향에 동일선상에 있음에 따라, 조준점 예상위치의 분포가 표적 손상영역에서 상대적으로 19번과 21번의 실험조건보다 미치는 영향이 넓기 때문에 NEW의 타격확률이 높은 것으로 볼 수 있다. 이는 동일한 조건에서도 표적의 방향오차에 따라 확률 값이 달라지는 것에 대한 정량적 해석 결과로써 기존 직관적 해석에 의한 추정치 보다 정확성이 높다고 볼 수 있다.
한편, Table 6의 Contact의 타격확률에서도 BIH 메시지에 Contact 정보는 동일하나, 표적방향오차에 따라 조준점과 Contact 사이의 거리차가 달라지면서 Contact가 타격될 확률에 영향을 주는 것을 확인하였다.
실험번호 19와 20의 경우 Contact의 위치가 표적의 위치보다 조준점과 더 근접함에 따라 Contact의 타격확률이 표적보다 높은 것으로 나타났다. 이는 NEW의 Seeker에서 Contact를 표적으로 오인했을 때, 타격평가 분석에서 원인해석에 중요한 요소로 볼 수 있다.
4. 결 론
본 논문에서는 실시간으로 전송되는 WDL의 메시지를 활용하여 위치정보에 불확실성을 내포한 표적의 타격을 예측할 수 있는 타격평가 모델을 설계하 였으며, 제안한 타격평가 모델을 모의시스템에 적용함으로써 다양한 운용환경에서 표적타격 예측 가능성을 제시하였다. 특히 WDL의 메시지를 활용으로 실시간 현장상황이 반영된 Seeker의 성능지표(SAS) 및 표적정보를 타격평가 결과해석에 반영한 것과 Seeker에서 포착되는 객체정보로 인하여 NEW가 오포착 가능성을 반영한 점은 기존 사후 이론적 분석과 해석방법에 있어서 차별성이 있다. 본 논문에서 제시한 모의분석결과를 통하여 본 연구에서 설계한 타격평가 기법이 임무계획 및 재 교전을 위한 전략수립에 빠른 대응 방안으로 해석결과를 이용하는데 적용가능성을 확인하였다. 향후 공중플랫폼 중심의 전술데이터링크 시스템 통신방식이 구축된다면, 무장데이터링크가 적용된 무기체계가 다양한 플랫폼에서 상황정보 공유가 가능함에 따라[17], 본 논문에서 제시한 타격평가 소프트웨어는 활용도가 높을 것으로 판단된다.