반능동 레이저 탐색기를 사용하는 유도무기체계의 레이저 조사기 연구
A Study on the Laser Designator for the Missile System Using Semi-Active Laser Seeker
Article information
Abstract
Semi-active laser missile systems with high accuracy are necessary to asymmetric threats, such as UAV(Unmanned Aerial Vehicle). They are usually used to attack stationary or slow moving targets, therefore we should study on the laser designator which can detect and track fast moving targets in order to deal with UAV. In this study, design specifications are came up through performance analysis of existing laser designators, and laser designation method for fast moving target is developed. The detection and tracking performance of developed laser designator are verified through inside/outside tests on ground/aerial stationary/moving targets. Through this study, we obtain laser designator techniques that could be applied to actual semi-active laser missile systems.
1. 서 론
반능동 레이저(SAL: Semi-active laser) 유도 방식은 레이저 조사기로 대상 표적을 조사하고, 표적에서 반사된 레이저 빔을 탐색기가 탐지하여 유도탄을 유도하는 기법이다. 레이저 조사기는 유도탄에 장착된 레 이저 탐색기가 표적에서 반사되는 레이저 빔을 탐지할 수 있도록 표적에 레이저를 조사해 주는 장치이며 표적을 탐지하고 추적할 수 있는 표적탐지, 추적 및 레이저 거리측정 장비들이 추가로 구성되기도 한다.
반능동 레이저 유도무기는 표적을 타격할 때까지 표적을 조사해야 하는 단점에도 불구하고 높은 명중률로 인해 다양한 형태의 무기체계가 개발되어 운용되고 있다. 대표적인 반능동 레이저 유도무기는 Lockheed Martin의 HELLFIRE, BAE사의 APKWS 등이 있으며 국내에서는 아직 개발된 사례가 없다. 그러나 최근 소형 무인기와 같은 비대칭 위협에 대한 대응과 대테러 지상 작전을 위하여 반능동 레이저 유도무기의 필요성이 대두되고 있다. 특히 소형 무인기와 같은 대공표적과의 교전을 위해서는 이를 효과적으로 탐지/추적할 수 있는 레이저 조사기의 개발이 중요하다.
반능동 레이저 유도무기는 통상적으로 정지된 표적이나 저속으로 이동하는 지상표적을 대상으로 운용된다. 상대적으로 기동성이 좋은 소형 무인기를 대공 표적으로 설정할 경우, 레이저 조사기의 영상추적 성능을 향상시켜야 한다.
반능동 레이저 유도무기의 종말 유도 특성에 대한 연구를 수행하였으며[1–3], 고속으로 이동하는 대공 표적에 대한 레이저 조사기 연구도 수행되었다. 이와 관련하여 레이저 조사기 시뮬레이션 및 실외 실험을 수행하여 성능 특성을 분석하고 무기체계 적용 가능성을 확인하였으며[4], 영상 추적 장치와 통합하여 고속 이동 표적을 조사하는 방법이 개발되었다[5].
본 논문의 목적은 기존 지상 고정표적 및 저속 이동표적 대응용 레이저 조사기에 고속 대공표적을 안정적으로 조사하는 기능을 추가함으로서 대공 교전이 가능한 반능동 레이저 유도무기 체계의 개발 가능성을 확인하는 것이다. 이를 위해 기존 레이저 조사기 분석 결과를 신규 레이저 조사기 HW, SW 구성 및 성능 분석에 활용하였다. 또한, 고속 이동표적의 추적 오차 최소화를 위해 KCF 영상정보추출 알고리즘과 제안된 추정 필터를 적용하였으며, 실험을 통해 성능을 검증하였다.
2. 레이저 조사기
2.1 설계 목표
본 연구의 목표는 EO 카메라를 통한 표적 영상 획득 및 표적 추적과 레이저 조사가 가능한 전자광학 장비 설계이다. 본 연구에서 고려하는 소형 무인기와 같은 대공 표적의 특성에 따라 표적 지시 및 추적거리는 최대 3 km 이상으로 설정하며, 세부 사양은 기존 장비에 대한 문헌검토 및 성능 분석을 통해 결정하고자 한다. Fig. 1은 레이저 조사기의 운용개념을 나타낸 것이다.

Operation concept of laser designator
2.2 중/단거리 레이저 조사기 검토
Table 1은 본 연구에서 검토한 중/단거리 레이저 조사기의 주요 특징을 분석해 나타낸 것이다.

Analysis of laser designator
Table 1의 주요 항목에 대한 설명은 다음과 같다. 레이저 탐색기는 특정 레이저 펄스 반복 주파수(Laser pulse repetition frequency)만을 추적하는 방식이므로 펄스 대 펄스 안정성(Pulse to pulse stability) 이 중요하며 편차가 작을수록 탐색기가 추적하는데 유리하다. Boresight retention은 조준을 유지할 수 있는 성능이며 이 값은 작을수록 정밀하게 레이저를 조사할 수 있다. Range finding은 레이저의 최소거리와 최대 조사거리를 나타낸다. Laser code는 각 레이저 조사기에서 사용하는 레이저 펄스의 특징을 나타낸 항목으로 대부분의 레이저 조사기는 NATO STANAG 3733 표준서의 규정을 따르고 있다.
문헌검토 결과에 따르면 대부분 고체 레이저 Nd: YAG(Neodyminum:Yttrium, Aluminum, Garnet)를 사용하고 있으며, 용도에 따라 다양한 형태가 개발되어 운용되고 있다. 표적지시와 거리측정(LRF) 기능을 겸하고 있는 장비가 다수(조사기는 고출력, 거리 측정은 저출력을 요구)로 분석되었다. 대부분 열상(Thermal image) 기능을 보유하고 있고, 최근 소형 경량화 되어 휴대용에 유리한 Rattler 계열이 개발된 것으로 추정된다.
2.3 레이저 조사기 모델링
반능동 레이저 유도무기에 적용하기 위한 레이저 조사기의 모델 분석 및 시뮬레이션을 통해 중요한 성능 변수를 도출하고자 한다. 본 절은 레이저 유도무기의 종말 유도에 대한 연구[1] 및 대공 표적에 대한 레이저 조사기 연구[2]를 참고하였다. 대공 표적을 대상으로 하는 반능동 레이저 유도무기 모델은 Fig. 2와 같다.
Semi-active laser missile system
모델은 레이저조사기(D), 대공 표적(T), 유도무기의 탐색기(S)로 구성되어 있으며, 본 모델을 바탕으로 레 이저 조사기에서 발사된 빔이 유도무기의 탐색기와 조우하기 위해서는 아래의 식 (1), (2)를 모두 만족해야 한다.
식 (1)에서 μ는 탐색기 헤딩 벡터와 탐색기로부터 표적으로 빔이 방사되는 벡터(SST)사이의 각도를 나타낸다. SST는 표적(T)에서 탐색기(S)까지의 거리 벡터이며 위첨자 S는 탐색기 좌표라는 의미이다. μ는 탐색기의 FOV(Field Of View, βs)보다 작아야 한다. 즉, 식 (1)은 유도무기의 탐색기 FOV 안에 표적에서 반사된 레이저 빔이 포함되어야 한다는 조건이다.
식 (2)에서 α는 레이저 빔의 표면 수직 벡터(n)와 표적에서 탐색기로의 거리 벡터(SST) 사이의 각도를 의미한다. α가 90˚이하여야 하는 조건이며 위첨자 T는 표적 좌표라는 의미이다. 즉, 식 (2)는 레이저 빔이 표적의 표면에 반사되는 조건을 나타낸 것으로, 표면을 뚫고 지나가는 레이저 빔은 탐색기와 조우할 수 없음을 나타낸 것이다.
대기를 통해 전달되는 레이저 빔의 파워는 대기 감쇄로 지수 함수적으로 감소한다. Beer-lambert 법칙을 통해 감쇄된 레이저 빔의 파워를 일반화하여 나타내면 식 (3)과 같다.
x는 대기를 통해 레이저 빔이 전달된 거리이며, k는 감쇄 계수이다. 대기의 복잡함과 다양성으로 감쇄 계수를 정하는 것은 쉽지 않으나 주요한 4가지 감쇄 계수(분자 흡수(Molecular absorption), 분자 회절(Molecular scattering), 에어로졸 흡수(Aerosol absorption), 에어로졸 회절(Aerosol scattering))를 더하여 근사할 수 있다. 분자 흡수 계수는 전자보다 크고 레이저의 파장보다 작은 대기 입자와 관련되며 위도와 계절에 영향을 받는다. 또한 에어로졸 흡수 계수는 레이저 파장과 유사한 대기 입자와 관련되며 시정에 영향을 받는다.
위와 같이 모델링 된 결과를 이용하여 레이저 조사 기의 주요 설계 파라미터를 변경하면서 시뮬레이션을 수행하였다. 탐색기의 FOV, Aperture diameter, 레이저 확산각, 지시 오차, 레이저 에너지, 표적의 크기, 조우 조건 등의 값을 변경하면서 표적에서 반사되어 나오는 레이저의 에너지가 S/N ratio 이상 감지되는지 분석하였다. 충분한 레이저 에너지가 확보되어야 대기를 통과하면서 레이저 에너지가 감쇄되더라도 S/N ratio 이상의 신호를 감지 가능하다. 또한 과도한 지시 오차가 발생할 경우 표적에서 반사되는 레이저 신호를 급격히 저하시키기 때문에 성능에 큰 영향을 줄 수 있다. 이는 추후 추적 알고리즘을 분석할 때 주요한 영향인자가 된다.
Fig. 3은 시뮬레이션 결과 중 탐색기의 사분면에 입사된 레이저 빔의 분포를 나타낸 것으로 레이저 유도무기는 각 사분면의 에너지 분포를 25 %로 동일하게 분포하도록 기동함으로써 종말에는 유도무기가 표적과 조우하도록 한다.
Laser beam distribution entered in the seeker
2.4 레이저 조사기 설계 사양
검토된 레이저 조사기의 모델링 분석결과를 통해 확인된 성능 변수에 따라 레이저 조사기의 설계 사양을 정리하였다. 레이저 타입은 분자 흡수가 적은 Nd:YAG 적절한 것으로 검토하였고, 빔 확산각은 0.3 mRad 수준으로 검토하였다. Starting designation energy 는 기존의 장비가 약 100 mJ 내외를 사용하고 있어 유사한 수준에서 검토하였다. 또한, 오차의 경우 전체 시스템 기준 200 μRad 내외로 검토하였다. 본 사양을 바탕으로 성능 분석을 통해 최적화하여 조사기를 설계하였다.
2.5 EO 카메라, 영상추적 신호처리기, 김발 설계 사양
EO 카메라를 통한 표적 영상 획득 및 표적 추적과 대공표적을 추적하기 위한 영상추적신호처리기 및 김발에 대한 설계 사양을 정리하였다. 주요 설계 사양으로 시계는 3.9°×2.93° 수준, 해상도는 640×480 이상, 영상갱신율은 60 Hz 이상이다. 탐지된 영상을 기반으로 표적을 추적할 수 있는 견고한 알고리즘을 적용하고자 하며, 본 논문 3절에서 이와 관련하여 다루었다.

3. 고속 이동 표적 레이저 조사 기법
본 연구에서 고려하는 소형 무인기와 같은 대공 표적은 고속으로 이동한다. 기존의 반능동 레이저 유도무기가 고속으로 이동하는 표적을 대상으로 하는 사례는 드물다. 카메라와 같은 영상획득장치를 통해 표적을 추적 할 때 화면에 전시되는 표적에 대해 게이트를 씌워 사용자에게 편의를 제공한다. 일반적으로 영상획득장치와 레이저 조사기는 동일한 김발 위에 위치하며, 화면의 중심에 레이저 빔의 중심을 정렬시킨다. 따라서 화면의 중심에 게이트가 씌워진 표적을 위치시킴으로서 레이저 빔이 표적을 조사하도록 한다. 여기서 기존의 방식은 영상 추적 후 김발을 제어하므로 시간 지연이 발생하는데, 고정 및 저속 표적의 경우 레이저 조사가 이루어지지만 본 연구에서 고려하는 무인 항공기와 같은 고속 표적의 경우 시간 지연으로 인해 레이저 조사가 제대로 이루어지지 못한다.
Fig. 5와 같이 이동하는 표적에 대해서는 표적의 속도만큼 오차를 가지게 된다. 따라서 본 절은 고속 이동 표적에 대응할 수 있는 레이저 조사 기법에 대해 다루고자 한다.

Failure on laser designating a high-speed target
3.1 대공 고속이동 표적의 영상추적 기법[7–9]
고속으로 이동하는 대공 표적에 레이저를 정확하게 조사하기 위해서는 고성능의 영상 추적 장치가 필요하다. 영상 추적 기법은 매우 다양한 연구가 진행되어 왔으며[6] 최근에는 기계학습을 응용한 연구도 활발히 진행되고 있다.
본 논문에서는 최소한의 연산만으로 영상정보를 처리할 수 있는 KCF(Kernelized Correlation Filter)를 사용하고자 한다[7]. KCF는 고전적인 Correlation filter에 학습 알고리즘을 적용한 알고리즘으로 순환 행렬(Circulant matrix)의 특성을 이용하여 연산 속도와 추적 정확도를 획기적으로 향상시켰다. 예를 들어 일반적인 Ridge regression을 수행할 경우 O(n3)가 걸리지만 순환행렬의 특성을 이용하여 연산할 경우 O(nlogn) 소요된다. 이를 통해 저장 공간과 계산의 소요 시간을 크게 줄일 수 있다.
영상 feature로 HOG(Histogram of Oriented Gradients)와 Raw pixels를 사용할 수 있다. 실험으로 통해 Raw pixels를 사용할 때보다 HOG를 사용한 KCF의 성능이 더 좋다는 것을 알 수 있다.
3.2 제안된 레이저 조사 방법
영상으로 획득되는 고속 이동 표적의 위치와 속도를 예측하여 표적에 레이저 조사가 이루어 질 수 있는 방법을 제안하고자 한다.
영상에서 표적을 2차원 좌표로 매핑하여 좌표를 획득하고, 과거의 좌표 및 변화량을 이용하여 표적의 위치를 예측함으로써 시간 지연 없이 화면의 중앙에 표적을 위치시켜 정밀한 레이저 조사가 가능하다. 레이저 조사 기법의 흐름도는 Fig. 6과 같다.
Proposed laser designation method
고속으로 이동하는 표적에 정밀한 레이저 조사를 위해 위치를 예측해야 하는데 이를 보정 위치값이라 하고 표기는
식 (4)는 표적 보정 위치를 산출하는 식이다. (
식 (5)는 표적 보정 속도를 산출하는 식이다. (
본 논문에서 제안한 추정필터는 픽셀 평면에서 추정값과 측정값의 가중치를 설정하여 결과적으로 픽셀과 픽셀 사이의 값을 추정하는 필터이다. 일반적으로 픽셀 평면에서 공간 좌표로 위치와 속도 정보를 변환 후 칼만필터와 같은 필터를 사용하여 추정값을 계산하는 방식을 많이 사용하지만 본 논문에서는 픽셀 평면에서 필터를 적용하였다. 따라서 일반적인 공간상의 위치, 속도 정보에서 발생하는 차원 문제가 발생하지 않고 이로 인해 픽셀의 위치 및 속도에 관하여 동일한 보정계수 적용이 가능하다. 보정계수의 산출은 실험에서 표적의 위치정보 및 속도 정보를 측정한 결과와 추정필터를 사용하여 공간 정보로 변환한 결과를 비교하여 오차를 최소화하는 보정계수를 비행 조건에 따라 산출하였다.
4. 성능 시험
레이저 표적 지시기의 구성은 Table 2와 같으며, 성능 시험을 통해 본 장비의 설계 요구조건을 검증하고자 한다. 먼저 요구조건에 대응하는 시험항목을 선정하고 실내 시험을 통해서 기본적인 사양과 성능을 검증 하고 운용조건에서의 성능은 실외 시험을 통해 검증하였다.

Laser designator composition
4.1 실내 시험
실내 실험실에서 수행된 시험은 장비의 사양 확인 및 실내에서 확인 가능한 항목에 대한 성능 시험을 수행하였다. 실내 시험을 통해 확인한 항목은 Laser boresight error, 출력과 반복률 조정 가능 여부, Laser type, Output energy, Beam divergence, Laser pointing error, 최대 Lasing rate, Laser pulse duration, 주간카메라 시계 및 파장, EO 카메라 해상도, 주간카메라 영상갱신율, 주간카메라 센서 픽셀 크기, 주간카메라 픽셀수, 김발 적재중량, 김발 위치 분해능, 운용전시기 형태, 조준콘솔 및 화면전시로 18가지 항목이다.
Fig. 7, 8은 실내 시험을 위한 시험 장비 구성으로 센서부와 EO 카메라 및 레이저 조사기 시험을 위한 구성을 나타낸 것이다.

Indoor tests of sensor parts

Indoor tests of EO camera and laser designator
4.2 야외 시험
실내에서 확인이 힘든 성능 시험 항목은 야외 시험을 통해 확인하였으며, 표적 지시 및 추적 거리, 전체 오차(Total error budget), 추적 오차(Tracking error), 영상추적신호처리기, 김발 작동 범위 및 작동 속도, 김발 제어기, 저장기능, 안전기능 8항목에 대해 시험을 수행하였다. Table 3은 야외 시험 주요 항목을 나타낸 것이다.

Main lists of field tests(Tracking and designation)
총 3차례 야외시험을 수행하였으며, 1차 야외시험에서는 고정표적 및 이동표적에 대하여 0.05 km에서 3.16 km 거리에서 레이저 조사 및 추적시험을 수행하였고, 대공 표적기/지상이동차량/해상이동선박 등에 대한 영상 추적시험을 수행하였다. 2차 야외시험은 지상 이동표적에 대하여 0.5 km에서 2.5 km 거리에서 이동속도 10∼40 km/h 이동 간 영상추적 및 레이저 조사 시험을 수행하였고, 소형 드론에 대한 영상 추적과 레이저 조사 시험도 병행하여 수행하였다. 3차 야외시험은 대형 드론, 고정익 항공기에 대한 영상추적 및 레이저 조사시험을 수행하였으며, 악천후 조건에서 레이저 조사 가능 여부도 확인하였다. Fig. 9는 지상 고정 및 이동표적에 대한 시험 방법을, Fig. 10은 대공표적에 대한 정지 및 고속 이동에 대한 시험 방법을 간단히 나타낸 것이다.

Field tests with ground moving target
Field tests with airborne target
4.3 성능시험 결과
레이저 표적 지시기의 실내 및 야외 성능시험을 통해서 수행한 모든 결과는 설계에서 도출한 기준을 모두 만족하였다.
실내시험을 통해서 출력과 반복률 조정은 Powermeter 와 광검출기로 측정하였고, Beam divergences는 빔프로파일러로 측정하였다. 선정된 조사기의 레이저 wavelength는 1.06405 μm, lasing rate는 코드 ‘1111’에서 50.0993 ms(20 pps), puls duration은 21.74 nsec로 측정 되었다. 조사기의 beam divergence는 2 km 내외에서 0.2 mRad 내외로 측정되었고 Laser pointing error는 빔프로파일러로 측정하여 50 μRad 내외로 확인하였다. 나머지 주요 성능은 야외시험을 통해서 확인하였다.
야외시험을 통해서 표적지시 및 추적거리는 3 km 내외에서 표적지시와 추적성능을 확인하였고, 추적 오차는 200 μRad 내외로 확인하였으며, 영상추적신호처리는 소형무인기 추적, 지상 이동차량 추적 및 지상 고정표적 추적을 통해 추적기능을 확인하였다. 추적 정밀도는 지상에서 거리별, 속도별 수행을 하여 분석을 수행하였으나 3차원 공간인 공중에서의 추적 정밀도를 데이터화 하여 분석하는 것에는 시험여건으로 인해 소형 무인기의 기동의 불안정성과 바람 등의 영향으로 한계가 있었다. 이번 연구에서는 소형 무인기와 드론을 실제로 다양한 거리와 속도 환경에서 추적하고 레이저를 조사할 수 있는지를 실험적으로 검증 하였다.
4.4 체계 적용에 대한 고찰
레이저 표적 지시기의 성능이 레이저 유도로켓 체계에 적용가능 한지를 종합적으로 분석하여 제시하고자 한다. Fig. 11에서 나타낸 것과 같이 분석 기준은 다수의 측정된 데이터를 통계적으로 처리하여 2σ(95 % 신뢰구간) 및 SWIR 카메라에 촬영된 레이저 스폿을 기준으로 분석한 결과이다.
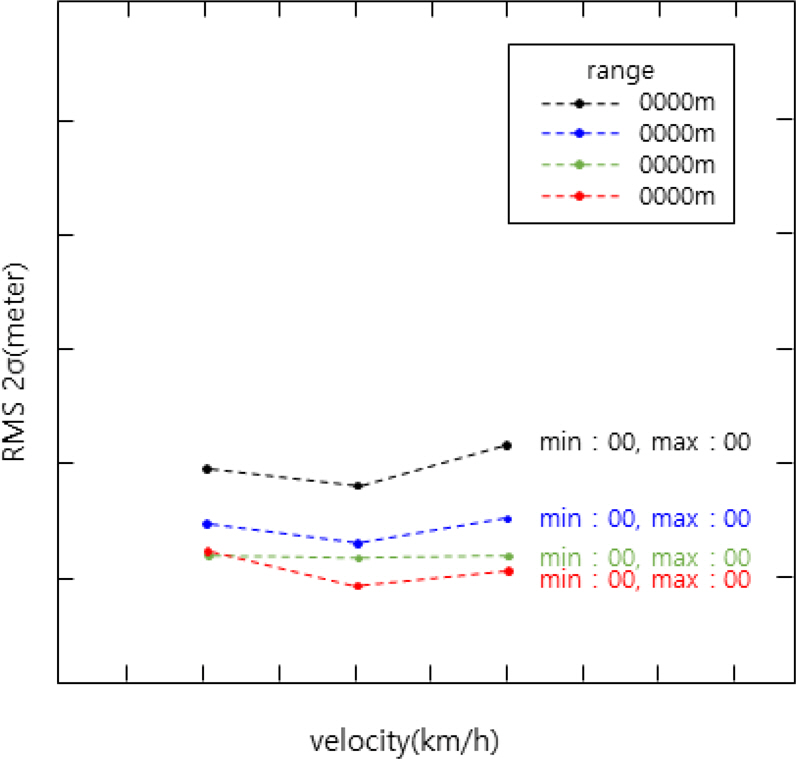
Error data on designating laser spot
고정 표적 영상추적 및 레이저 조사 기능 확인은 0.05∼3 km 영상추적 및 레이저 조사가 가능한지 확인하였고, 3 km 거리 기준 약 0.12 m 오차(강풍으로 인해 조사기가 흔들리는 상황에서 시험 수행) 수준을 보여주고 있어 고정 표적에 대한 영상추적 및 레이저 조사 기능은 만족하는 것으로 분석 되었다.
지상 이동 표적 영상추적 및 레이저 조사 기능은 거리에 따라 오차 증가 경향이 있는 것으로 분석되었고, 2.5 km 거리 기준 표적 지시오차 최대 0.09 m로 양호한 것으로 분석 되었다.
공중 이동 표적 영상추적 및 레이저 조사 기능은 고속표적(200 km/h 이상)에 대한 추적이 가능한 것을 대공 표적기 추적 시험을 통해서 확인하였고, 소형(0.28 m) 및 대형(3 m 이상) 표적에 대한 추적도 가능한 것을 소형 드론, 차량, 선박, 여객기 등의 표적 추적결과를 통해서 확인하였다. 공중 이동 표적의 레이저 조사 오차는 영상자료에 대한 육안판단 결과 0.2 m 이내임이 분석되었다. Fig. 12와 같이 공중 이동 표적에 대한 영상추적 및 레이저 조사 기능도 양호한 것으로 분석되었다.
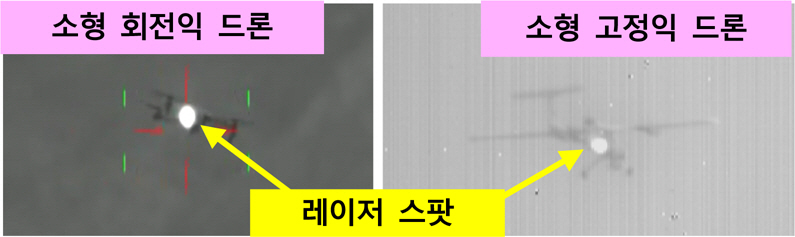
Tracking images on dron
5. 결 론
본 연구를 통해서 연구된 반능동 레이저 탐색기를 사용하는 유도무기체계의 레이저 조사기를 지상 고정/이동 표적, 공중 정지/이동 표적에 대하여 다양한 조건과 환경에서 영상추적 시험과 레이저 조사시험을 수행하였으며 이를 통해 소형 무인기 대응 레이저 유도로켓 등 다양한 유도무기체계에 적용할 수 있는 가능성을 확인하였다.