



м„ң лЎ
м ң 1мһҘмқҖ м„ңлЎ мңјлЎң л¬ҙмқёмӢңмҠӨн…ң л°Ҹ л¬ҙмқён•ӯкіөмӢңмҠӨн…ң
(UAS) к°ңмҡ”, м—°кө¬мқҳ л°°кІҪкіј н•„мҡ”м„ұмқ„ м„ңмҲ н•ҳкі ліё л…јл¬ёмқҳ кө¬м„ұм—җ лҢҖн•ҙ м„ӨлӘ…н•ҳмҳҖлӢӨ.
1.1 л¬ҙмқёмӢңмҠӨн…ңмқҳ 분лҘҳ
л¬ҙмқёмӢңмҠӨн…ңмқҖ нҶөм ң лҢҖмғҒм—җ л”°лқј л¬ҙмқён•ӯкіөкё°(UAV), л¬ҙмқёмҲҳмғҒм •(USV), л¬ҙмқём§ҖмғҒм°Ёлҹү(UGV), л¬ҙмқёмһ мҲҳм •(UUV) л°Ҹ н•ҳмқҙлёҢлҰ¬л“ңнҳ•(UHV)мңјлЎң 분лҘҳ н• мҲҳ мһҲмңјл©° мқҙмҷҖ к°ҷмқҖ лӢӨм„Ҝ к°Җм§Җ л¬ҙмқё мқҙлҸҷмІҙлҘј н•ҳлӮҳлЎң 묶м–ҙм„ң вҖңUxVвҖқ лЎң н‘ңкё°н•ңлӢӨ[43].

л¬ҙмқёмқҙлҸҷмІҙлҘј м ңм–ҙн•ҳлҠ” л°©лІ•мқҖ мҡҙмҡ©мһҗмқҳ к°ңмһ… м—¬л¶Җм—җ л”°лқј м •н•ҙм§Җл©° м„ёл¶Җм ҒмңјлЎңлҠ” мҡҙмҡ©мһҗмқҳ к°ңмһ…мқҙ мөңмҶҢнҷ”лҗң нҳ•нғңмқҳ л°ҳмһҗмңЁ м ңм–ҙ л°©мӢқ, мӣҗкІ©м—җм„ң мҲҳлҸҷмңјлЎң мӢңмҠӨн…ңмқ„ м ңм–ҙн•ҳлҠ” мҲҳлҸҷм ңм–ҙ л°©мӢқ, мҡҙмҡ©мһҗмқҳ к°ңмһ…мқҙ н•„мҡ” м—ҶлҠ” мҷ„м „мһҗмңЁм ңм–ҙ л°©мӢқмңјлЎң 분лҘҳн• мҲҳ мһҲлӢӨ[2].
л¬ҙмқёмӢңмҠӨн…ңмқҳ кіөнҶөм Ғмқё нҠ№м§•мңјлЎңлҠ” м•Ҳм „н•ң мҡҙмҡ©мқ„ мң„н•ҙ н•„мҡ”мӢң мҡҙмҡ©мһҗмқҳ мҰүк°Ғм Ғмқё к°ңмһ…мңјлЎң мҲҳлҸҷм ңм–ҙк°Җ к°ҖлҠҘн•ҳлҸ„лЎқ к°ңл°ңлҗҳл©° мқҙлҘј мң„н•ҙ л¬ҙмқёмқҙлҸҷмІҙлҘј нҶөм ңн•ҳлҠ” м—°лҸҷн”„лЎңнҶ мҪңмқҙ л°ҳл“ңмӢң мЎҙмһ¬н•ңлӢӨлҠ” м җмқҙлӢӨ. м„ёкі„ к°Ғкөӯм—җм„ңлҠ” л¬ҙмқёмқҙлҸҷмІҙлҘј нҡЁмңЁм ҒмңјлЎң м ңм–ҙн•ҳкё° мң„н•ҙ мҲҳмӢӯ л…„ м „л¶Җн„° к°Ғ 분야м—җ мөңм Ғнҷ”лҗң лӢӨм–‘н•ң н”„лЎңнҶ мҪңмқ„ м ңм •н•ҳм—¬ мӮ¬мҡ©н•ҳкі мһҲлӢӨ.
1.2 UAS к°ңмҡ”
л¬ҙмқён•ӯкіөмӢңмҠӨн…ң(UAS)мқҖ мқјл°ҳм ҒмңјлЎң м•„лһҳ к·ёлҰјкіј к°ҷмқҙ 비н–үмІҙ(л¬ҙмқён•ӯкіөкё°), лҚ°мқҙн„°л§ҒнҒ¬мһҘ비, мһ„л¬ҙмһҘ비, м§ҖмғҒнҶөм ңмһҘ비лЎң кө¬м„ұлҗңлӢӨ.
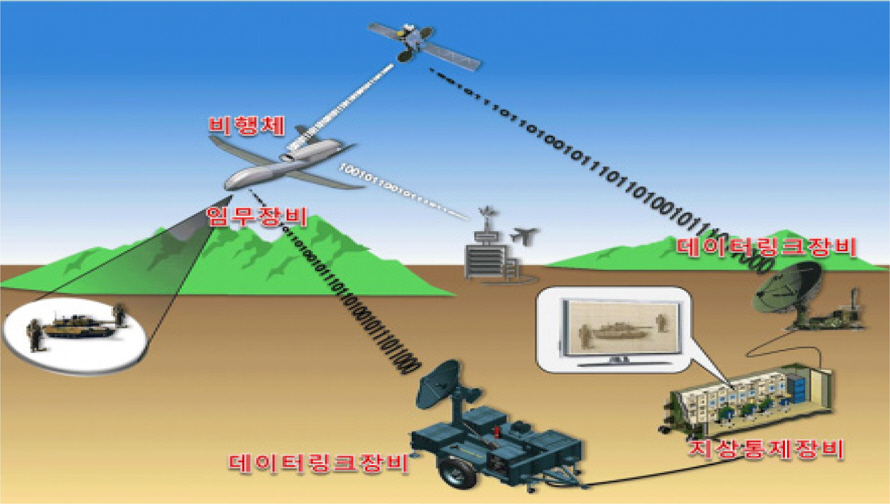
비н–үмІҙлҠ” л¬ҙмқён•ӯкіөкё° кё°мІҙ л°Ҹ кё°мІҙм—җ нғ‘мһ¬лҗҳлҠ” к°Ғмў… мһҘм№ҳ(비н–үмЎ°мў…, н•ӯм „, м„јм„ң, лҚ°мқҙн„° кё°лЎқ, 추진, м—°лЈҢ кі„нҶө л“ұ)лЎң кө¬м„ұлҗңлӢӨ. лҜёкөӯм—җм„ң мҡҙмҡ©мӨ‘мқё лҢҖн‘ңм Ғмқё л¬ҙмқён•ӯкіөкё° Gray EagleмқҖ лӮ к°ңнҸӯ 18 m, мөңлҢҖмқҙлҘҷмӨ‘лҹү мқҙ 1633 kg м •лҸ„лЎң к°Ғмў… мһ„л¬ҙмһҘ비(EO/IR, SAR, л¬ҙмһҘ л“ұ)лҘј л¶Җм°©н•ҳм—¬ кі лҸ„ 9 km мғҒкіөм—җм„ң 30мӢңк°„ м—°мҶҚмңјлЎң мһ„л¬ҙлҘј мҲҳн–үн•ңлӢӨ.

лҚ°мқҙн„°л§ҒнҒ¬мһҘ비лҠ” 비н–үмІҙ л°Ҹ мһ„л¬ҙмһҘ비 нҶөм ңлҘј мң„н•ң нҶөм ңлӘ…л №мқ„ 비н–үмІҙлЎң м „мҶЎн•ҳкі мһ„л¬ҙмғҒнғңлҘј м§ҖмғҒмңјлЎң м „мҶЎн•ҳкё° мң„н•ң м•Ҳн…ҢлӮҳ л°Ҹ к°Ғмў… м ңм–ҙмһҘм№ҳлЎң кө¬м„ұлҗңлӢӨ. лҚ°мқҙн„°л§ҒнҒ¬мқҳ мқјл°ҳм Ғмқё нҳ•мғҒмқҖ м•„лһҳ к·ёлҰјкіј к°ҷлӢӨ.

мһ„л¬ҙмһҘ비лҠ” к°җмӢң/м •м°°, нҷ”л¬ј мҡҙмҶЎ, кҙҖмёЎ л“ұ лӢӨм–‘н•ң мһ„л¬ҙ мҲҳн–үмқ„ мң„н•ҙ 비н–үмІҙм—җ мһҘм°©лҗҳлҠ” мһҘм№ҳлҘј мқҳлҜён•ҳл©° мһ„л¬ҙмһҘ비 кё°ліёмңјлЎң мһҘм°©лҗҳлҠ” EO/IR мһҘм№ҳмқҳ нҳ•мғҒмқҖ м•„лһҳ к·ёлҰјкіј к°ҷлӢӨ.

м§ҖмғҒнҶөм ңмһҘ비лҠ” 비н–үмІҙ, лҚ°мқҙн„°л§ҒнҒ¬ л°Ҹ мһ„л¬ҙмһҘ비лҘј нҶөм ңн•ҳкі мғҒнғңлҘј мҲҳмӢ н•ҳм—¬ м „мІҙ мһ„л¬ҙлҘј нҶөм ңн•ҳкё° мң„н•ҙ м—¬лҹ¬ мҡҙмҡ© мҪҳмҶ”лЎң кө¬м„ұлҗҳл©° мқјл°ҳм ҒмқҖ нҳ•мғҒмқҖ м•„лһҳ к·ёлҰјкіј к°ҷлӢӨ.

1.3 л¬ҙмқён•ӯкіөкё° 분лҘҳ
л¬ҙмқён•ӯкіөкё°лҘј 분лҘҳн•ҳлҠ” кё°мӨҖмқҖ көӯк°Җ л°Ҹ кё°кҙҖм—җ л”°лқј лӢӨм–‘н•ҳл©° көӯлӮҙ н•ӯкіөм•Ҳм „лІ• л°Ҹ н•ңкөӯн‘ңмӨҖнҳ‘нҡҢм—җм„ң 분лҘҳн•ҳлҠ” кё°мӨҖмқҖ лӢӨмқҢкіј к°ҷлӢӨ.
лЁјм Җ мҡ°лҰ¬лӮҳлқј вҖҳн•ӯкіөм•Ҳм „лІ•вҖҷм—җм„ңлҠ” м•„лһҳ н‘ңмҷҖ к°ҷмқҙ мөңлҢҖмқҙлҘҷмӨ‘лҹү л°Ҹ мһҗмІҙмӨ‘лҹү кё°мӨҖмңјлЎң л¬ҙмқён•ӯкіөкё°лҘј 분лҘҳн•ҳкі мһҲлӢӨ.
TableВ 1.
Classification of UAV (н•ӯкіөм•Ҳм „лІ•)
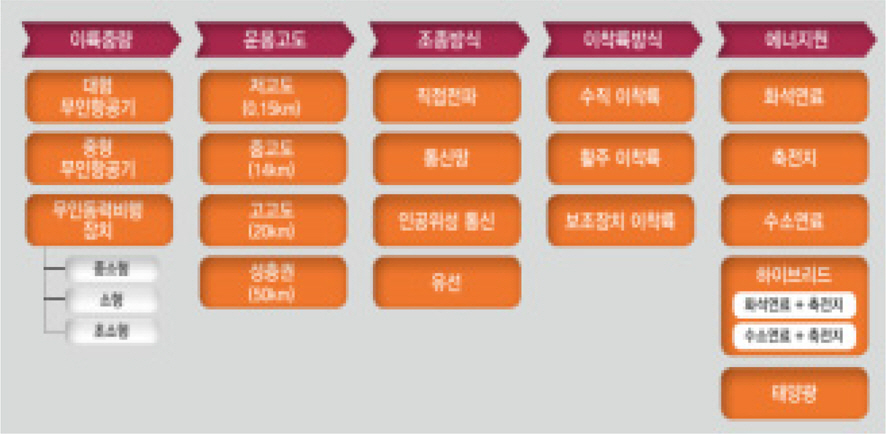
н•ңкөӯн‘ңмӨҖнҳ‘нҡҢм—җм„ңлҠ” мөңлҢҖмқҙлҘҷмӨ‘лҹү, мҡҙмҡ©кі лҸ„, мЎ°мў…л°©мӢқ, мқҙм°©лҘҷл°©мӢқ, м—җл„Ҳм§Җмӣҗмқ„ кё°мӨҖмңјлЎң л¬ҙмқён•ӯкіөкё°лҘј 분лҘҳн•ҳкі мһҲлӢӨ[3].
1.4 м—°кө¬мқҳ л°°кІҪкіј н•„мҡ”м„ұ
нҳ„лҢҖ м „мһҘ нҷҳкІҪмқҖ мқёлӘ…н”јн•ҙ мөңмҶҢнҷ”лҘј мң„н•ҙ л¬ҙмқёкё°лҘј к°ңл°ңн•ҳм—¬ м Ғк·№ нҷңмҡ©н•ҳкі мһҲлӢӨ. лҜёкөӯмқҳ кІҪмҡ° мқҙлқјнҒ¬мҷҖ м•„н”„к°ҖлӢҲмҠӨнғ„ л“ұм§Җмқҳ м§Җм—ӯм—җм„ң н•ңм •лҗң лі‘л ҘмңјлЎң нҡЁмңЁм Ғмқё мһ„л¬ҙмҲҳн–үмқ„ мң„н•ҙ л¬ҙмқёкё° кё°л°ҳмқҳ м •м°° л°Ҹ кіөкІ© мІҙкі„лҘј кҙ‘лІ”мң„н•ҳкІҢ лҸ„мһ…н•ҳкі мһҲмңјл©° лӢӨм–‘н•ң нҳ•нғңмқҳ л¬ҙмқёкё°л“Өмқҙ к°ңл°ңлҗҳл©ҙм„ң мқҙкё°мў… л¬ҙмқёкё°мІҙкі„к°„ м—°лҸҷ л°Ҹ нҶөн•©мқҳ н•„мҡ”м„ұмқҙ мҰқлҢҖлҗҳм—ҲлӢӨ. мқҙлҘј мң„н•ҙ л¬јлҰ¬ кі„мёөм—җм„ңл¶Җн„° мқ‘мҡ© кі„мёөм—җ мқҙлҘҙкё°к№Ңм§Җ к°Ғ кі„мёөлі„ м—°лҸҷмқ„ мң„н•ң м—¬лҹ¬ м—°кө¬л“Өмқҙ 진н–үлҗҳм—ҲлӢӨ. нҠ№нһҲ к·ёмӨ‘м—җм„ңлҸ„ л¶ҒлҢҖм„ңм–‘ мЎ°м•Ҫкё°кө¬(NATO)м—җм„ңлҠ” м—°н•©көӯ к°„мқҳ л¬ҙмқёкё° мғҒнҳёмҡҙмҡ©м„ұ нҷ•ліҙлҘј мң„н•ҙ л¬ҙмқёкё° м—°лҸҷн”„лЎңнҶ мҪңм—җ лҢҖн•ң н‘ңмӨҖ(STANAG 4586)мқ„ м ңм •н•ҳмҳҖлӢӨ. STANAG 4586мқҖ мқҙкё°мў… л¬ҙмқёкё° м—°лҸҷмқ„ мң„н•ҙ л¬ҙмқёкё° мІҙкі„мқҳ м•„нӮӨн…ҚмІҳ л°Ҹ мҡҙмҡ©к°ңл…җмқ„ нҸ¬н•Ён•ң мӢӨм ң л©”мӢңм§Җ нҸ¬л§·мқҙ нҸ¬н•Ёлҗҳм–ҙ мһҲмңјл©° нҳ„мһ¬ кө°мҡ© л¬ҙмқёкё° к°ңл°ң 분야м—җм„ң мғҒнҳёмҡҙмҡ©м„ұ ліҙмһҘмқ„ мң„н•ң н‘ңмӨҖмңјлЎң м Ғмҡ©лҗҳкі мһҲлӢӨ. лҜёкөӯ, мқҙмҠӨлқјм—ҳкіј к°ҷмқҖ л¬ҙмқёкё° м ңмһ‘ м„ м§„көӯл“ӨмқҖ нҳ„мһ¬ к°ңл°ңлҗҳлҠ” лҢҖл¶Җ분мқҳ л¬ҙмқён•ӯкіөкё° мӢңмҠӨн…ң к°ңл°ңм—җ STANAG 4586 н‘ңмӨҖмқ„ мұ„нғқн•ҳкі мһҲлӢӨ. к·ёлҹ¬лӮҳ көӯлӮҙм—җм„ңлҠ” м•„м§Ғ мқҙкё°мў… л¬ҙмқёкё° м—°лҸҷмқ„ мң„н•ң н‘ңмӨҖнҷ”к°Җ лҜёнқЎн•ң мҲҳмӨҖмқҙлӢӨ.
STANAG 4586 н‘ңмӨҖ м Ғмҡ©мқ„ мң„н•ҙм„ңлҠ” лӢЁмҲң л©”мӢңм§Җ нҸ¬л§·лҝҗл§Ң м•„лӢҲлқј м§ҖмғҒнҶөм ңмһҘ비мҷҖ л¬ҙмқёкё°к°„ л©”мӢңм§ҖлҘј мЈјкі л°ӣлҠ” м •нҷ•н•ң м Ҳм°ЁлҘј н•„мҡ”лЎң н•ңлӢӨ. к·ёлҹ¬лӮҳ н‘ңмӨҖ л¬ём„ңм—җлҠ” м—°лҸҷ м Ҳм°Ёк°Җ к°„лһөнһҲ м„Өкі„лҗҳм–ҙ мһҲм–ҙ STANAG 4586 н‘ңмӨҖ м ңм •м—җ кҙҖм—¬н•ҳкі мһҲлҠ” л©”мқҙм Җ к°ңл°ң м—…мІҙк°Җ м•„лӢҢ мқҙмғҒ н‘ңмӨҖмқ„ м •нҷ•нһҲ м Ғмҡ©н•ҳкё°к°Җ мүҪм§Җ м•ҠмқҖ мғҒнҷ©мқҙлӢӨ. мқҙлҹ¬н•ң нҷҳкІҪм—җлҸ„ л¶Ҳкө¬н•ҳкі м•һмңјлЎң лҠҳм–ҙлӮҳлҠ” кө°мҡ© л¬ҙмқёкё°мқҳ мғҒнҳёмҡҙмҡ©мқ„ нҷ•ліҙн•ҳкё° мң„н•ҙ н•ңкөӯнҳ• н‘ңмӨҖ м ңм •мқҙ н•„мҡ”н•ҳлҜҖлЎң көӯлӮҙм—җм„ңлҸ„ л¬ҙмқён•ӯкіөкё° м—°лҸҷн”„лЎңнҶ мҪңм—җ лҢҖн•ң н‘ңмӨҖнҷ”к°Җ мӢңкёүн•ң мғҒнҷ©мқҙлӢӨ.
л¬ҙмқёкё°лҠ” мҙҲкё°м—җлҠ” кө°мӮ¬мҡ©лҸ„лЎң м ңмһ‘лҗҳм—ҲмңјлӮҳ мҡ”мҰҳ мӮ¬м§„ мҙ¬мҳҒмқ„ мң„н•ң л Ҳм Җмҡ©, лҶҚм•Ҫл°©м ң/нҷ”л¬јмҡҙмҶЎ/мқёлӘ…нғҗм§Җ/ кё°мғҒкҙҖмёЎ/нҶөмӢ мӨ‘кі„ л“ұмқ„ мң„н•ң мӮ°м—…мҡ©, көҗнҶөмҲҳлӢЁмңјлЎңмҚЁмқҳ к°ңмқёмҡ© н•ӯкіөкё°(PAV) л“ұмңјлЎң м“°мһ„мғҲк°Җ лӮ лЎң нҷ•мһҘлҗҳкі мһҲлӢӨ[4]. лҜјк°„м—җм„ңлҠ” 2009л…„ лЎңл ҢмҰҲл§Ҳмқҙм–ҙк°Җ мҶҢнҳ•л¬ҙмқёкё° нҶөм ңлҘј мң„н•ҙ MAVLink(Micro Air Vehicle Link) н”„лЎңнҶ мҪңмқ„ мІҳмқҢмңјлЎң кіөк°ңн•ҳмҳҖлӢӨ. мқҙлҘј нҷңмҡ©н•ҳм—¬ л¬ҙмқёкё°лҘј м ңм–ҙн•ҳлҠ” Autopilot(PX4, ArduPilot, AutoQuad, iNAV л“ұ) л°Ҹ MAVLinkлҘј м§Җмӣҗн•ҳлҠ” м§ҖмғҒнҶөм ң мҶҢн”„нҠёмӣЁм–ҙ(Mission Planner, QGroundControl, APM Planner 2, Universal Ground Control Station л“ұ)л“ұмқҙ к°ңл°ңлҗҳм—Ҳкі , лҢҖл¶Җ분 мҳӨн”ҲмҶҢмҠӨлЎң кіөк°ңн•ҳм—¬ л“ңлЎ мқ„ м—°кө¬н•ҳлҠ” к°ңмқёлҝҗл§Ң м•„лӢҲлқј мғҒмҡ©л“ңлЎ м ңмһ‘м—җ л§Һмқҙ нҷңмҡ©лҗҳкі мһҲлӢӨ. лҳҗн•ң MAVLinkлҘј м§ҖмҶҚм ҒмңјлЎң л°ңм „мӢңнӮӨкё° мң„н•ҙ лҰ¬лҲ…мҠӨ мһ¬лӢЁкіј Microsoft, Intel л°Ҹ л©”мқҙм Җ л“ңлЎ м ңмЎ°мӮ¬л“Өмқҙ вҖҳDronecode н”„лЎңм қнҠёвҖҷ мқҙлҰ„мңјлЎң 비мҳҒлҰ¬ лӢЁмІҙлҘј м„ӨлҰҪн•ҳм—¬ PX4 autopilot, MAVLink, QgroundControl, MAVSDK лҘј мЈјлҸ„м ҒмңјлЎң к°ңл°ңн•ҳм—¬ мҳӨн”ҲмҶҢмҠӨлЎң л°°нҸ¬н•ҳкі мһҲлӢӨ[7вҖ“13].
1.5 м—°кө¬мқҳ лӘ©м Ғ
ліё м—°кө¬м—җм„ңлҠ” лҜј/кө°м—җм„ң нҷңл°ңнһҲ м—°кө¬лҗҳкі мһҲлҠ” л¬ҙмқёкё° м—°лҸҷ н”„лЎңнҶ мҪңмқҳ нҠ№м§•мқ„ 비көҗ/분м„қн•ҳм—¬ мғҒнҳё ліҙмҷ„н• мҡ”мҶҢ л°Ҹ к°ңм„ м җмқ„ лҸ„м¶ңн•ҳм—¬ н”„лЎңнҶ мҪң лӢЁмқјнҷ” к°ҖлҠҘм„ұмқ„ кІҖнҶ н•ҳкі л¬ҙмқёкё°к°„ мғҒнҳёмҡҙмҡ©м„ұмқ„ мҰқлҢҖмӢңнӮ¬ к°ңм„ л°©м•Ҳмқ„ лҸ„м¶ңн•ҳкі мһҗ н•ңлӢӨ.
1.6 л…јл¬ёмқҳ кө¬м„ұ
ліё л…јл¬ёмқҖ мҙқ 6мһҘмңјлЎң кө¬м„ұлҗҳм–ҙ мһҲмңјл©° мЈјмҡ” лӮҙмҡ©мқҖ лӢӨмқҢкіј к°ҷлӢӨ.
м ң1мһҘмқҖ м„ңлЎ л¶ҖлЎң л¬ҙмқёмӢңмҠӨн…ңмқҳ 분лҘҳ, UASмқҳ к°ңмҡ”, м—°кө¬ л°°кІҪкіј н•„мҡ”м„ұ, м—°кө¬мқҳ лӘ©м Ғ л°Ҹ л…јл¬ёмқҳ кө¬м„ұмқ„ м„ӨлӘ…н•ҳмҳҖлӢӨ.
м ң2мһҘмқҖ мқҙлЎ м Ғ л°°кІҪ кҙҖл Ё м—°кө¬лЎңм„ң л¬ҙмқёкё°мӮ°м—…лҸҷн–Ҙ, UAS мӢңмҠӨн…ңмқҳ н‘ңмӨҖнҷ” лҸҷн–Ҙ, STANAG 4586к°ңмҡ”, MAVLink н”„лЎңнҶ мҪң к°ңмҡ”м—җ лҢҖн•ҙ м„ӨлӘ…н•ҳмҳҖлӢӨ.
м ң3мһҘмқҖ м—°кө¬ м„Өкі„ л°Ҹ м ‘к·јл°©лІ•мңјлЎң STANAG 4586 н”„лЎңнҶ мҪң л°Ҹ MAVLink н”„лЎңнҶ мҪңмқ„ мғҒм„ё 분м„қн•ҳкі л‘җ н”„лЎңнҶ мҪңмқҳ нҠ№м§•мқ„ 비көҗ/분м„қн•ҳмҳҖлӢӨ.
м ң4мһҘмқҖ к°ңм„ мӮ¬н•ӯ лҸ„м¶ң л°Ҹ 분м„қмңјлЎң н”„лЎңнҶ мҪң к°ңм„ мӮ¬н•ӯмқ„ мҡ”м•Ҫн•ҳкі нҠ№нһҲ 비н–үкІҪлЎң к°ңм„ мӮ¬н•ӯм—җ лҢҖн•ң м„Өкі„лҘј 진н–үн•ҳмҳҖлӢӨ.
м ң5мһҘмқҖ к°ңм„ мӮ¬н•ӯ нҡЁкіј 분м„қ л°Ҹ кІ°кіјлЎң кіЎм„ нҳ• 비н–үкІҪлЎңкі„нҡҚмқ„ мҲҳлҰҪн•ҳлҠ” л°©м•Ҳм—җ лҢҖн•ң нҡЁкіјлҘј 분м„қн•ҳмҳҖлӢӨ. м ң6мһҘмқҖ мҡ”м•Ҫ л°Ҹ кІ°лЎ мңјлЎң м—°кө¬ кІ°кіјм—җ лҢҖн•ң мҡ”м•Ҫ
кіј н–Ҙнӣ„ м—°кө¬ кі„нҡҚм—җ лҢҖн•ҙ м„ңмҲ н•ҳмҳҖлӢӨ.
мқҙлЎ м Ғ л°°кІҪ л°Ҹ кҙҖл Ём—°кө¬
м ң 2мһҘм—җм„ңлҠ” UASмқҳ лӢӨм–‘н•ң 분야м—җ лҢҖн•ң н‘ңмӨҖнҷ” лҸҷн–Ҙм—җ лҢҖн•ҙ м•Ңм•„ліҙм•ҳлӢӨ. нҠ№нһҲ л¬ҙмқёкё° м—°лҸҷн”„лЎңнҶ мҪңмқҳ н‘ңмӨҖнҷ” лҸҷн–Ҙм—җ лҢҖн•ҙ кө°мҡ© л¬ҙмқёкё° нҶөм ңлҘј мң„н•ҙ мӮ¬мҡ©лҗҳлҠ” STANAG 4586 н‘ңмӨҖкіј лҜјк°„м—җм„ң мҶҢнҳ•л¬ҙмқёкё° нҶөм ңлҘј мң„н•ҙ мӮ¬мҡ©лҗҳлҠ” MAVLink н”„лЎңнҶ мҪңмқҳ к°ңл°ңлҸҷн–Ҙ л°Ҹ нҷңмҡ©л°©м•Ҳм—җ лҢҖн•ҙ кі м°°н•ҳмҳҖлӢӨ.
2.1 UAS н‘ңмӨҖнҷ” лҸҷн–Ҙ
2.1.1 UAS мғҒнҳёмҡҙмҡ©м„ұ н–ҘмғҒмқ„ мң„н•ң н‘ңмӨҖнҷ” лҸҷн–Ҙ
UASлҠ” лҜј/кө°м—җм„ң к°ҖмһҘ нҷңл°ңнһҲ м—°кө¬лҗҳкі мһҲлҠ” 분야мқҙл©° лӢӨм–‘н•ң лӘ©м ҒмңјлЎң к°ңл°ңлҗҳлҠ” м—¬лҹ¬ UAS мІҙкі„мқҳ н•©лҰ¬м Ғмқё нҡҚл“қкіј нҡЁмңЁм Ғмқё мҡҙмҡ©мқ„ мң„н•ҙ л°ҳл“ңмӢң UASмӢңмҠӨн…ңмқ„ кө¬м„ұн•ҳлҠ” кө¬м„ұмһҘм№ҳ л°Ҹ UAS мӢңмҠӨн…ңк°„ мғҒнҳёмҡҙмҡ©мқҙ н•„мҡ”н•ҳлӢӨ. мғҒнҳёмҡҙмҡ©мқ„ мң„н•ҙ NATO, лҜёмңЎкө°, лҜёкіөкө°, SAE л°Ҹ лӢӨм–‘н•ң мғҒм—…мҡ© л“ңлЎ к°ңл°ң нҡҢмӮ¬м—җм„ң кҙ‘лІ”мң„н•ң лӘ©н‘ңлҘј к°Җм§Җкі н”„лЎңнҶ мҪң н‘ңмӨҖнҷ”лҘј мң„н•ҙ л…ёл Ҙн•ҳкі мһҲлӢӨ. нҠ№нһҲ лҜёкөӯкіј мң лҹҪ мӨ‘мӢ¬мңјлЎң NATO(л¶ҒлҢҖм„ңм–‘ мЎ°м•Ҫкё°кө¬: North Atlantic Treaty Organization)лҠ” нҡҢмӣҗкөӯ к°„мқҳ кө°мӮ¬мҡ©н’Ҳмқҳ мғҒнҳёмҡҙмҡ©м„ұ нҷ•ліҙлҘј мң„н•ҙ мҡ©м–ҙ л°Ҹ нҶөмӢ л°©лІ• л“ұм—җ лҢҖн•ң к·ңкІ©мқ„ м •мқҳн•ҳлҠ” STANAG н‘ңмӨҖмқ„ м ңм •н•ҳмҳҖлӢӨ. нҠ№нһҲ л¬ҙмқёкё°мҷҖ м§ҖмғҒнҶөм ңмһҘ비간 м—°лҸҷ н”„лЎңнҶ мҪңмқ„ м •мқҳн•ҳлҠ” STANAG 4586 мқҙмҷём—җлҸ„ л¬ҙмқёкё°м—җ нғ‘мһ¬лҗң мһ„л¬ҙмһҘ비м—җм„ң мғқм„ұлҗң м„јм„ң лҚ°мқҙн„°мқҳ мғҒнҳём—°лҸҷмқ„ мң„н•ҙ STANAG 4607, 4609, 7023 л“ұмқҳ к·ңкІ©м„ңлҘј м ңм •н•ҳм—¬ мһ„л¬ҙмһҘ비м—җм„ң мғқм„ұлҗң лҚ°мқҙн„°к№Ңм§Җ мғҒнҳёмҡҙмҡ©м„ұмқ„ нҷ•ліҙн•ҳкё° мң„н•ҙ н‘ңмӨҖмқ„ м ңм •н•ҳмҳҖлӢӨ[18,19].
2.1.2 비н–үмІҙ кө¬м„ұн’Ҳк°„ мғҒнҳёмҡҙмҡ©м„ұ н–ҘмғҒмқ„ мң„н•ң н‘ңмӨҖнҷ” лҸҷн–Ҙ
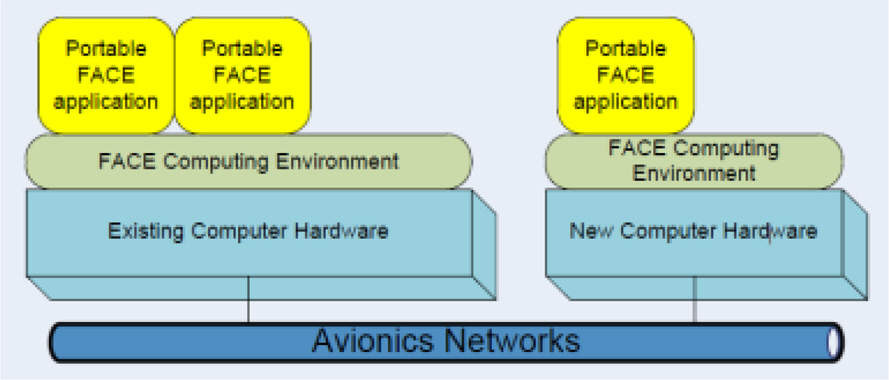
л¬ҙмқёкё°мӢңмҠӨн…ңмқ„ кө¬м„ұн•ҳлҠ” 비н–үмІҙ лӮҙл¶Җ кө¬м„ұн’Ҳк°„мқҳ мғҒнҳёмҡҙмҡ©м„ұ нҷ•ліҙлҘј мң„н•ҙ FACE(Future Avionics Capability Environment) н‘ңмӨҖмқҙ м ңм •лҗҳм–ҙ кҙҖлҰ¬лҗҳкі мһҲлӢӨ. FACEлҠ” 비н–үмІҙм—җ нғ‘мһ¬лҗҳлҠ” мһҘ비л“Өмқҙ лҚ” л§ҺмқҖ мҶҢн”„нҠёмӣЁм–ҙ кё°лҠҘмқҙ мҡ”кө¬лҗЁм—җ л”°лқј н•ӯм „ S/Wмқҳ ліөмһЎм„ұмқҙ мҰқлҢҖлҗҳм–ҙ нҶөн•©лӘЁл“Ҳнҷ”к°Җ н•„мҡ”н•ҳм—¬ к°ңл°ңлҗҳм—ҲлӢӨ. FACE лҠ” н•ҳл“ңмӣЁм–ҙ лҸ…лҰҪм„ұ, OS лҸ…лҰҪм„ұ, мқ‘мҡ© S/W лҸ…лҰҪм„ұмқ„ нҷ•ліҙн•ҳкё° мң„н•ҙ н•ҳл“ңмӣЁм–ҙ Layer, OS Layer, мқ‘мҡ© S/W LayerлҘј кё°лҠҘм ҒмңјлЎң 분лҰ¬н•ҳкё° мң„н•ң S/W мқён„°нҺҳмқҙмҠӨ н‘ңмӨҖмқҙлӢӨ[20].
2.1.3 м§ҖмғҒнҶөм ңмһҘ비 кө¬м„ұн’Ҳк°„ мғҒнҳёмҡҙмҡ©м„ұ н–ҘмғҒмқ„ мң„н•ң н‘ңмӨҖнҷ” лҸҷн–Ҙ
л¬ҙмқёмӢңмҠӨн…ңм—җм„ң л§Ҳм§Җл§ү лӮЁмқҖ н‘ңмӨҖнҷ” 축мқҖ л°”лЎң м§ҖмғҒнҶөм ңмһҘ비мқҳ н‘ңмӨҖнҷ”мқҙлӢӨ. н•ҳлӮҳмқҳ м§ҖмғҒнҶөм ңмһҘ비м—җм„ң ліөмҲҳмқҳ мқҙкё°мў… л¬ҙмқёкё° нҶөм ңлҘј мң„н•ҙм„ң л°ҳл“ңмӢң л¬ҙмқёкё° м—°нҶө н”„лЎңнҶ мҪңмқҳ н‘ңмӨҖнҷ”к°Җ м„ н–үлҗҳм–ҙм•ј н•ҳлҠ”лҚ°, м„ м§„көӯм—җм„ңлҠ” STANAG 4586мқ„ нҶөн•ҙ л¬ҙмқёкё° м—°лҸҷн”„лЎңнҶ мҪңм—җ лҢҖн•ң н‘ңмӨҖнҷ”к°Җ 진н–үлҗҳм—Ҳкі мӢӨмҡ©нҷ” лӢЁкі„м—җ мһҲлӢӨ. к·ёлһҳм„ң н•ҳлӮҳмқҳ м§ҖмғҒнҶөм ңмһҘ비м—җм„ң ліөмҲҳ л¬ҙмқёкё°лҘј нҶөм ңн•ҳкё° мң„н•ң лӘ©м ҒмңјлЎң лҜё көӯл°©м„ұм—җм„ң UCS Architecture н‘ңмӨҖмқ„ м ңм •н•ҳмҳҖкі , UUV/UGV/USV л“ұмңјлЎң нҷ•лҢҖ мӮ¬мҡ©мқ„ мң„н•ҙ SAEм—җм„ң н‘ңмӨҖмқ„ кҙҖлҰ¬н•ҳкі мһҲлӢӨ. UCS ArchitectureлҠ” м§ҖмғҒнҶөм ңмһҘ비мҷҖ л¬ҙмқёкё° к°„мқҳ мқён„°нҺҳмқҙмҠӨлҘј 분лҰ¬н•ҳлҠ” кө¬мЎ°лҘј нғқн•ҳм—¬ м–ҙл– н•ң л¬ҙмқёкё°лқјлҸ„ н”„лЎңнҶ мҪңліҖнҷҳ м„ң비мҠӨлҘј нҶөн•ҙ м§ҖмғҒнҶөм ңмһҘ비 лӮҙл¶Җ мқён„°нҺҳмқҙмҠӨлЎң ліҖнҷҳн•ҳм—¬ мӮ¬мҡ©к°ҖлҠҘн•ҳлҸ„лЎқ SOA(Service Oriented Architecture)л°©мӢқмңјлЎң мҶҢн”„нҠёмӣЁм–ҙлҘј к°ңл°ңн•ҳлҸ„лЎқ к¶ҢмһҘн•ҳкі мһҲлӢӨ.
2.2 STANAG 4586 к°ңмҡ”
мҙҲкё°мқҳ л¬ҙмқёкё°мӢңмҠӨн…ң мЎ°лӢ¬ мӢң лҜё көӯл°©м„ұм—җм„ңлҠ” кө°мҡ© л¬ҙмқёкё°мҷҖ м§ҖмғҒнҶөм ңмһҘ비лҘј н•ҳлӮҳмқҳ мЎ°н•©мңјлЎң к°„мЈјн•ҳм—¬ м„Өкі„/к°ңл°ң/нҡҚл“қмқ„ 진н–үн•ҳмҳҖлӢӨ. л”°лқјм„ң к°Ғ м—…мІҙлі„лЎң к°ңл°ңн•ң л¬ҙмқёкё°-м§ҖмғҒнҶөм ңмһҘ비л§Ң м—°лҸҷмқҙ к°ҖлҠҘн•ҳмҳҖмңјл©°, м•„лһҳ к·ёлҰјкіј к°ҷмқҙ м—¬лҹ¬ мў…лҘҳмқҳ л¬ҙмқёкё°лҘј мҡҙмҡ©н•ҳкё° мң„н•ҙм„ңлҠ” лҸҷмқјн•ң мҲҳл§ҢнҒјмқҳ м§ҖмғҒнҶөм ңмһҘ비к°Җ мҡ”кө¬лҗҳлҠ” вҖңstove -pipeвҖқ нҳ•нғңмқҳ м„Өкі„к°Җ мЈјлҘј мқҙлЈЁм—ҲлӢӨ.
мқҙлҹ¬н•ң нҳ„мғҒмқҖ к°Ғ көӯк°Җлі„ м—°н•© мһ‘м „ мҲҳн–үмқҙ н•„мҡ”н•ң NATO к°Җмһ…көӯ к°„м—җлҸ„ мң мӮ¬н•ң нҳ•нғңлЎң л°ңмғқн•ҳкІҢ лҗңлӢӨ. к·ё кІ°кіј лҜёкөӯ л°Ҹ NATO к°Җмһ…көӯл“Өмқ„ мӨ‘мӢ¬мңјлЎң к°Ғмў… м „мһҘм—җм„ң нҸӯл°ңм ҒмңјлЎң мҰқк°Җн•ҳкІҢ лҗң мһ„л¬ҙ лі„ л¬ҙмқёкё°лҘј н•ҳлӮҳмқҳ нҶөн•©лҗң м§ҖмғҒнҶөм ңмһҘ비лЎң мҡҙмҡ©н•ҳм—¬ нҡЁмңЁм Ғмқё мһ‘м „ мҲҳн–үмқ„ мқҙлЈЁкё° мң„н•ң мҡ”кө¬к°Җ м җм°Ё м»ӨмЎҢмңјл©° мқҙлҘј мң„н•ң мғҒнҳёмҡҙмҡ©м„ұ н‘ңмӨҖмқ„ м ңкіөн•ҳкё° мң„н•ҳм—¬ вҖҷ04л…„лҸ„м—җ STANAG 4586 Edition1мқҙ мөңмҙҲ м ңм •лҗҳм—ҲлӢӨ[23].

STANAG 4586мқҳ лӘ©м ҒмқҖ мғҒнҳёмҡҙмҡ©м„ұ мҲҳмӨҖмқ„ лӢ¬м„ұн•ҳкё° мң„н•ҙ UCSм—җм„ң кө¬нҳ„н•ҙм•јн•ҳлҠ” мқён„°нҺҳмқҙмҠӨлҘј м§Җм •н•ҳм—¬ м„ңлЎң лӢӨлҘё UAV л°Ҹ н•ҙлӢ№ мһ„л¬ҙмһҘ비 л°Ҹ л Ҳкұ°мӢң лӘ…л №, м ңм–ҙ, нҶөмӢ , C4I мӢңмҠӨн…ңкіј нҶөмӢ н• мҲҳ мһҲлҸ„лЎқ кҙҖл Ё к·ңкІ©мқ„ м •мқҳн•ҳлҠ” кІғмқҙлӢӨ[24].
мқҙнӣ„ кі„мҶҚ к°ңл°ңлҗҳлҠ” л¬ҙмқёкё° мҲҳмҡ© л°Ҹ мөңмӢ мһ„л¬ҙлҘј л°ҳмҳҒн•ҳкё° мң„н•ҙ кҫёмӨҖнһҲ к°ңм •лҗҳкі мһҲмңјл©° вҖҷ07л…„лҸ„ Edition2, вҖҷ12л…„лҸ„м—җ Edition3, вҖҷ17л…„лҸ„м—җ Edition4лЎң к°ңм •лҗҳм—ҲлӢӨ. л¬ҙмқёкё° к°ңл°ң м„ м§„көӯл“ӨмқҖ STANAG 4586мқ„ нҷңмҡ©н•ҳм—¬ л¬ҙмқёкё°мҷҖ м§ҖмғҒнҶөм ңмһҘ비간 мғҒнҳёмҡҙмҡ©м„ұмқ„ нҷ•ліҙн•ҳм—¬ н•ҳлӮҳмқҳ м§ҖмғҒнҶөм ңмһҘ비м—җм„ң м—¬лҹ¬ л¬ҙмқёкё°лҘј мҡҙмҡ© мӨ‘м—җ мһҲлӢӨ[6]. STANAG 4586мқҖ PDF нҢҢмқјлЎң м ңм •лҗҳкі нҢҢмқјм—җлҠ” UAS м—җ лҢҖн•ң м•„нӮӨн…ҚмІҳ, мһҘ비м—җ лҢҖн•ң мҡ©м–ҙ, мқён„°нҺҳмқҙмҠӨ к·ңм•Ҫ, мғҒм„ёлҚ°мқҙн„° нҸ¬л§·, м—°лҸҷ м Ҳм°Ё л“ұмқ„ м •мқҳн•ҳкі мһҲлӢӨ[18].
2.3 MAVLink к°ңмҡ”
MAVLink(Micro Air Vehicle Communication) н”„лЎңнҶ мҪңмқҖ 2009л…„м—җ мҠӨмң„мҠӨ м·ЁлҰ¬нһҲ лҢҖн•ҷмқҳ Lorenz Meierк°Җ Open Source(LGPL) кё°л°ҳмңјлЎң л§Ңл“Өм–ҙ진 лқјмқҙлёҢлҹ¬лҰ¬мқҙлӢӨ. MAVLinkлҠ” мҶҢнҳ• л¬ҙмқёкё°м—җ м Ғн•©н•ҳлҸ„лЎқ л§Өмҡ° м ңн•ңлҗң нҶөмӢ лҢҖм—ӯм—җм„ңлҸ„ мӮ¬мҡ©н• мҲҳ мһҲлҸ„лЎқ к°ҖліҚкІҢ м„Өкі„ лҗҳм—Ҳмңјл©° 2009л…„ мҙҲкё° лІ„м „мқ„ лҰҙлҰ¬мҰҲ н•ҳмҳҖкі нҳ„мһ¬ л§ҺмқҖ м»ЁнҠёлҰ¬л·°н„°л“Өмқҙ н”„лЎңнҶ мҪңмқ„ к°ңл°ңн•ҳм—¬ 2.3 лІ„м „мқҙ кіөк°ңлҗҳм—ҲлӢӨ[25].
мҶҢнҳ•л¬ҙмқёкё°м—җлҠ” лӢӨм–‘н•ң нҳ„мӢӨм Ғмқё мқҙмң лЎң мқён•ҙ(нҢҢмӣҢл¶ҖмЎұ, кіөк°„м ңм•Ҫ, л¬ҙкІҢм ңм•Ҫ л“ұ) м»ҙн“ЁнҢ… мһҗмӣҗмқҙ л¶ҖмЎұн•ҳкё° л•Ңл¬ём—җ 비н–ү л°Ҹ мһ„л¬ҙмҲҳн–үм—җ лҢҖл¶Җ분мқҳ м»ҙн“ЁнҢ… мһҗмӣҗмқ„ нҲ¬мһ…н•ҳкІҢ лҗңлӢӨ. л”°лқјм„ң мғҒлҢҖм ҒмңјлЎң нҶөмӢ мқ„ мң„н•ң м—°мӮ°мқҖ мөңмҶҢнҷ” лҗҳм–ҙм•ј н•ҳлҜҖлЎң лӢЁмҲңн•ң нҢЁнӮ· кө¬мЎ°лҘј к°Җм§ҖлҸ„лЎқ м„Өкі„лҗҳм—ҲлӢӨ. MAVLink мҳӨн”ҲмҶҢмҠӨ н”„лЎңм қнҠё м°ём—¬мһҗл“ӨмқҖ н”„лЎңк·ёлһҳл°Қмқ„ мң„н•ң к°Ғмў… н—ӨлҚ” л°Ҹ кҙҖл Ё мҪ”л“ңлҘј мһҗлҸҷмңјлЎң мғқм„ұн•ҙ мЈјлҠ” нҲҙмқ„ л¬ҙлЈҢлЎң л°°нҸ¬н•ҳкі мһҲкё° л•Ңл¬ём—җ нҲҙмқ„ мӮ¬мҡ©н•ҳм—¬ мҶҗмүҪкІҢ к°ңл°ңмқҙ к°ҖлҠҘн•ң мһҘм җмқ„ к°Җ м§Җкі мһҲлӢӨ. MAVLinkлҠ” https://mavlink.io/en/ мӮ¬мқҙнҠём—җм„ң кіөмӢқм ҒмңјлЎң кҙҖлҰ¬лҗҳкі мһҲмңјл©° кіөмӢқ н”„лЎңнҶ мҪң л¬ём„ңлҠ” XMLнҳ•нғңмқҙл©° нҢҢмқј лӮҙл¶Җм—җ к°„лһөн•ң м„ӨлӘ…мқ„ 추к°Җн•ҳм—¬ л°°нҸ¬н•ҳкі мһҲлӢӨ
2.4 л¬ҙмқёкё° мӮ°м—…лҸҷн–Ҙ
2.4.1 кө°мҡ© л¬ҙмқёкё° к°ңл°ң лҸҷн–Ҙ
м „ м„ёкі„ 40м—¬ лӮҳлқјм—җм„ң кө°мҡ© л¬ҙмқёкё° м—°кө¬ к°ңл°ңмқҙ мқҙлӨ„м§Җкі мһҲмңјл©° кё°мҲ к°ңл°ңмқ„ мң„н•ң кёҖлЎңлІҢ н•©мһ‘мқҙ лҠҳкі мһҲлӢӨ. л¬ҙмқёкё°лҠ” л¬ҙм—ҮліҙлӢӨлҸ„ кё°мЎҙ мң мқёкё°м—җ 비н•ҙ 4D(Dull, Dirty, Dangerous, Deep) мһ„л¬ҙ мҲҳн–үмқҙ к°ҖлҠҘн•ҳкі мқёлӘ… н”јн•ҙ л¶ҖлӢҙмқҙ м—ҶлӢӨлҠ” кІғмқҙ к°ҖмһҘ нҒ° к°•м җмқҙлӢӨ. м„ёкі„мӢңмһҘм—җм„ң мЈјлӘ©л°ӣлҠ” кө°мҡ© л¬ҙмқёкё°лЎңлҠ” лҜёкөӯмқҳ кёҖлЎңлІҢ нҳёнҒ¬В·н”„л ҲлҚ°н„°В·лҰ¬нҚј, мқҙмҠӨлқјм—ҳмқҳ н—ӨлЎ В·н—ӨлҘҙл©”мҠӨ, мӨ‘көӯмқҳ мңҷлЈҪ2нҳёВ·м°Ёмқҙнӣҷ-4(CH-4) л“ұмқҙ мһҲлӢӨ[15вҖ“17].
2.4.2 мғҒм—…мҡ© л¬ҙмқёкё° к°ңл°ң лҸҷн–Ҙ
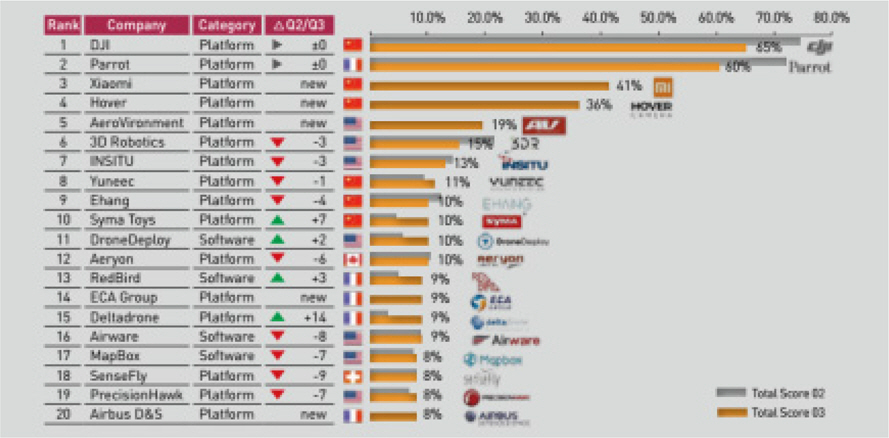
мғҒм—…мҡ© л¬ҙмқёкё° к°ңл°ң нҳ„нҷ©мқ„ мӮҙнҺҙліҙл©ҙ, м„ёкі„ мғҒмң„ 20к°ң м—…мІҙ мӨ‘м—җм„ң 1мң„мқё DJI мӮ¬лҘј нҸ¬н•Ён•ң мӨ‘көӯмқҳ 6к°ң м—…мІҙк°Җ мғҒмң„к¶Ңм—җ мһҗлҰ¬н•ҳкі мһҲлӢӨ. лҜёкөӯмқҳ л¬ҙмқёкё°мӢңмһҘмқҖ м „нҶөм ҒмңјлЎң лҢҖнҳ• кө°мҲҳм—…мІҙмқё л…ёмҠӨлЎӯк·ёлЈЁлЁј, ліҙмһү, лЎқнһҲл“ңл§ҲнӢҙ л“ұмқҙ мӮ°м—…мқ„ мЈјлҸ„н•ҙ мҷ”мңјлӮҳ мғҒм—…мҡ© л“ңлЎ мқ„ к°ңл°ңн•ҳлҠ” 3D лЎңліҙнӢұмҠӨк°Җ к°ңл°ң мҙҲкё° мҳӨн”ҲмҶҢмҠӨ кё°л°ҳмқҳ н”Ңлһ«нҸјмқ„ мқҙмҡ©н•ҙ к°ҖкІ©мқ„ лӮ®м¶ӨмңјлЎңмҚЁ мғҒм—…мҡ© л“ңлЎ мқҳ лҢҖмӨ‘нҷ”м—җ кё°м—¬н–ҲлӢӨ.
м—°кө¬ м„Өкі„ л°Ҹ м ‘к·ј л°©лІ•
3.1 STANAG 4586 мғҒм„ё 분м„қ
3.1.1 UAS кө¬м„ұ
UASлҘј мқҙлЈЁлҠ” кө¬м„ұ мҡ”мҶҢлҘј нҒ¬кІҢ л¬ҙмқёкё° м§ҖмғҒл¶Җ(UAV Surface Component)мҷҖ л¬ҙмқёкё° кіөмӨ‘л¶Җ(UAV Air Component)лЎң лӮҳлҲ„л©°, л¬ҙмқёкё° кіөмӨ‘л¶ҖлҠ” лӢӨмӢң Air Vehicle ElementмҷҖ Payload ElementлЎң, л¬ҙмқёкё° м§ҖмғҒл¶ҖлҠ” UA Control System(UCS) ElementмҷҖ Launch and Recovery ElementлЎң кө¬л¶„н•ҳмҳҖкі л§Ҳм§Җл§үмңјлЎң л¬ҙмқёкё° м§ҖмғҒл¶ҖмҷҖ кіөмӨ‘л¶Җм—җ нғ‘мһ¬лҗҳм–ҙ л¬ҙм„ мғҒмңјлЎң м—°лҸҷ кё°лҠҘмқ„ м ңкіөн•ҳлҠ” Data link ElementлЎң м •мқҳн•ҳкі мһҲлӢӨ.

3.1.2 UCS кө¬м„ұ
м—¬лҹ¬ кө¬м„ұмҡ”мҶҢлЎң мқҙлЈЁм–ҙм§ҖлҠ” UAS л¶ҖмІҙкі„к°„ мғҒнҳёмҡҙмҡ©м„ұ нҷ•ліҙлҘј мң„н•ҙ STANAG 4586м—җм„ңлҠ” м•„лһҳ к·ёлҰјкіј к°ҷмқҙ Core UCS, VSM, DLI, AV, CCI, CCISMмңјлЎң кө¬м„ұлҗң л…јлҰ¬м Ғмқё UCS м•„нӮӨн…ҚмІҳ к°ңл…җмқ„ лҸ„мһ…н•ҳмҳҖлӢӨ. мЈјмҡ” мҡ©м–ҙм—җ лҢҖн•ң м„ӨлӘ…мқҖ лӢӨмқҢкіј к°ҷлӢӨ[6].
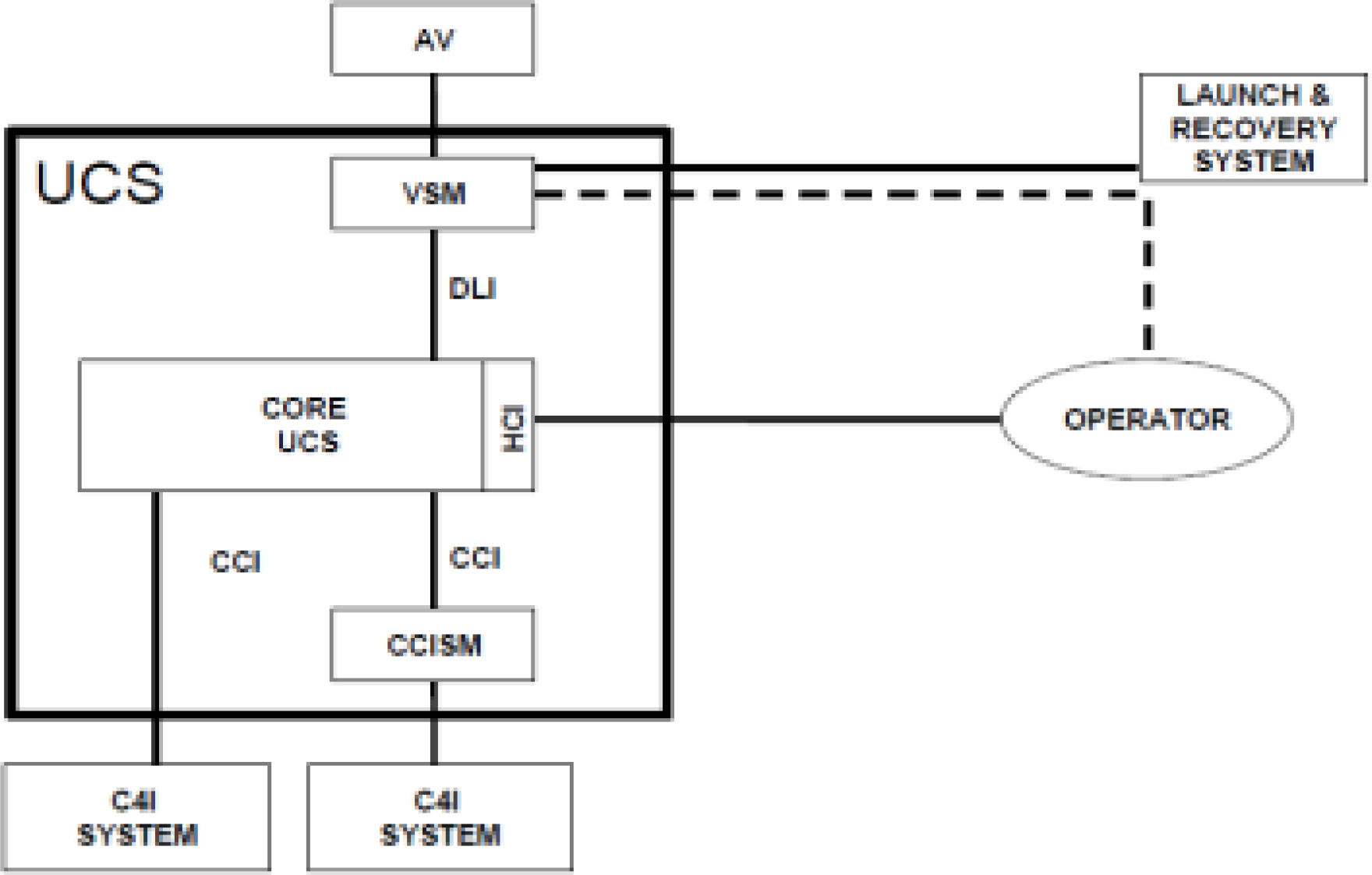
3.1.2.1 AV(Air Vehicle)
UCSмқҳ м ңм–ҙм—җ л”°лқј 비н–үмқ„ мҲҳн–үн•ҳл©° мқҙлҘј нҶөн•ҙ нҡҚл“қн•ң мһ„л¬ҙмһҘ비мқҳ мһ„л¬ҙлҚ°мқҙн„°лҘј UCSлЎң мҶЎмӢ н•ҳлҠ” 비н–үмІҙлҘј мқҳлҜён•ңлӢӨ.
3.1.3 мғҒнҳёмҡҙмҡ©м„ұ л ҲлІЁ(Level of Interoperability)
STANAG 4586м—җм„ңлҠ” UASл¶ҖмІҙкі„к°„ мғҒнҳёмҡҙмҡ©м„ұ мҲҳмӨҖмқ„ м •мқҳн•ҳкё° мң„н•ҳм—¬ Level Of Interoperability(LOI)лқјлҠ” к°ңл…җмқ„ м ңмӢңн•ҳмҳҖмңјл©°, 5лӢЁкі„лЎң м •мқҳлҗң LOIмқҳ к°Ғ мҲҳмӨҖ лі„ м •мқҳлҠ” лӢӨмқҢкіј к°ҷлӢӨ.
TableВ 2.
LOI definition
| LOI | м •мқҳ |
|---|---|
| 5 | мқҙм°©лҘҷ нҶөм ң |
| 4 | 비н–үмІҙ нҶөм ң (мқҙм°©лҘҷ нҶөм ң м ңмҷё) |
| 3 | мһ„л¬ҙмһҘ비 нҶөм ң |
| 2 | мһ„л¬ҙмһҘ비 лҚ°мқҙн„° м§Ғм ‘ мҲҳмӢ |
| 1 | мһ„л¬ҙмһҘ비 лҚ°мқҙн„° к°„м ‘ мҲҳмӢ |
мқҙлҹ¬н•ң 5лӢЁкі„мқҳ LOI л ҲлІЁ м •мқҳм—җм„ң м•Ң мҲҳ мһҲл“Ҝмқҙ, мғҒмң„ л ҲлІЁмқҙ н•ҳмң„ л ҲлІЁмқ„ л°ҳл“ңмӢң нҸ¬н•Ён•ҳлҠ” к°ңл…җмқҖ м•„лӢҲлӢӨ. LOI Level 1вҲј3мқҖ UAм—җ нғ‘мһ¬лҗң мһ„л¬ҙ мһҘ비м—җ лҢҖн•ң м—°лҸҷ лҠҘл Ҙмқ„ м •мқҳн•ҳл©°, Level 4вҲј5лҠ” UA мһҗмІҙм—җ лҢҖн•ң м—°лҸҷ лҠҘл Ҙмқ„ м ңмӢңн•ҳлҠ” мІҷлҸ„лЎңм„ң м„ңлЎң лҸ…лҰҪм Ғмқё к°ңл…җмңјлЎң мЎҙмһ¬н•ңлӢӨ. лҳҗн•ң, н•ҙлӢ№ UAм—җ ліөмҲҳмқҳ мһ„л¬ҙ мһҘ비к°Җ мһҘм°©лҗ кІҪмҡ° к°Ғ мһҘ비 лі„лЎң LOI LevelлҸ„ лҸ…лҰҪм ҒмңјлЎң л¶Җм—¬н• мҲҳ мһҲлӢӨ. м•һм„ң мӮҙнҺҙліё кІғмІҳлҹј мқҙлҹ¬н•ң мғҒнҳёмҡҙмҡ©м„ұ л ҲлІЁмқ„ ліҙмһҘн•ҙмЈјлҠ” кё°лҠҘмқҖ VSMмқҙ лӢҙлӢ№н•ҙм•ј н• л¶Җ분мқҙлӢӨ[6].
NATO м°Ҫм„Ө мЈјкҙҖкөӯмқё лҜёкөӯмқҖ мқҙлҹ¬н•ң NATOмқҳ кө°мҡ©л¬ҙмқёкё° нҶөн•© мҡҙмҳҒ к°ңл…җм—җ н•ң л°ң м•һм„ң лҜё DoD мӮ°н•ҳмқҳ лӘЁл“ мң мқё-л¬ҙмқё мӢңмҠӨн…ңмқ„ нҶөн•© мҡҙмҳҒн•ҳлҠ” к°ңл…җмқ„ лӢҙмқҖ
DoD Unmanned Systems Integrated Roadmap FY2013вҖ“2038м—җм„ң к·ёлҸҷм•Ҳмқҳ кө°мҡ©л¬ҙмқёкё°к°Җ к°җмӢңм •м°°, н‘ңм ҒнҡҚл“қ, кіөкІ©, н”јн•ҙ분м„қ л“ұмқҳ лӢЁлҸ… мһ„л¬ҙ мң„мЈјлЎң мҡҙмҳҒлҗҳм–ҙ мҷ”лӢӨл©ҙ лҜёлһҳм—җлҠ” нҢҖмӣҢнҒ¬ мһ‘м „мҡҙмҳҒ мӨ‘мӢ¬мңјлЎң мҡҙмҳҒ к°ңл…җмқ„ л°”кҫём–ҙ лӮҳк°Ҳ кІғмқ„ м ңмӢңн•ҳкі мһҲлӢӨ. м•„лһҳ к·ёлҰјмқҖ Roadmapм—җ лӮҳмҷҖ мһҲлҠ” мң мқё-л¬ҙмқё мӢңмҠӨн…ң нҶөн•© мҡҙмҳҒ к°ңл…җмқҙлӢӨ[32].

мқҙл Үл“Ҝ мһҘлһҳмқҳ кө°мҡ©л¬ҙмқёкё° мҡҙмҳҒ к°ңл…җмқҖ мӢңмҠӨн…ң мҡҙмҡ©мқҳ нҡЁмңЁм„ұмқ„ м ңкі н•ҳкё° мң„н•ң мғҒнҳёмҡҙмҡ©м„ұмқ„ к°ҖмһҘ к°•мЎ°н•ҳкі мһҲлӢӨ[33].
3.1.4 STANAG 4586 л©”мӢңм§Җ к·ёлЈ№
STANAG 4586мқҖ л¬ҙмқёкё° мҡҙмҡ©мқ„ мң„н•ң н‘ңмӨҖ н”„лЎңнҶ мҪңмқ„ м ңмӢңн•ҳкі мһҲмңјл©° мқҙлҘј мң„н•ҙ н•„мҡ”н•ң л©”мӢңм§ҖмҷҖ м„ёл¶Җ лҚ°мқҙн„° н•ӯлӘ©л“Өмқ„ м •мқҳн•ҳкі мһҲлӢӨ. мқҙлҹ¬н•ң л©”мӢңм§Җл“ӨмқҖ м „л°ҳм Ғмқё л¬ҙмқёкё° мҡҙмҡ©м—җ кіөнҶөм ҒмңјлЎң мҡ”кө¬лҗҳлҠ” м ңм–ҙ л°Ҹ мғҒнғң нҷ•мқёмқ„ мң„н•ң кіөмҡ© л©”мӢңм§Җ(Generic Message)мҷҖ к°Ғ м§ҖмғҒ нҶөм ң мһҘ비-비н–үмІҙ/мһ„л¬ҙмһҘ비 лі„ нҠ№м„ұмқ„ м§Җмӣҗн•ҳкё° мң„н•ң м „мҡ© л©”мӢңм§Җ(Private Message)лЎң кө¬л¶„лҗңлӢӨ. кіөмҡ© л©”мӢңм§ҖлҠ” STANAG 4586мқ„ мӨҖмҡ©н•ҳлҠ” лӘЁл“ UA л°Ҹ CUCSм—җм„ң мІҳлҰ¬лҗҳм–ҙм•ј н• мөңмҶҢн•ңмқҳ л©”мӢңм§Җ м„ёнҠёлҘј кө¬м„ұн•ңлӢӨ. мқҙм—җ л°ҳн•ҙ м „мҡ© л©”мӢңм§Җмқҳ кІҪмҡ°лҠ” STANAG 4586м—җм„ң н• лӢ№ к°ҖлҠҘн•ң л©”мӢңм§Җ лІҲнҳё(Message Number)л§Ң м •мқҳн•ҳкі мӢӨм ң л©”мӢңм§Җмқҳ лӮҙмҡ©м—җ лҢҖн•ҙм„ңлҠ” к°Ғ UAм—җм„ң н•„мҡ”н•ң лӮҙмҡ©мқ„ к°ңлі„м ҒмңјлЎң м •мқҳн•ҳм—¬ мӮ¬мҡ©н•ҳлҸ„лЎқ м„Өкі„лҗҳм–ҙ мһҲмңјл©°, н•ҙлӢ№ м „мҡ© л©”мӢңм§Җмқҳ мІҳлҰ¬лҠ” к°Ғ UA лі„ VSMмқ„ нҶөн•ҙ мқҙлЈЁм–ҙм§ҖкІҢ лҗңлӢӨ. м•„лһҳк·ёлҰјмқҖ STANAG 4586 Edition 4 Volume II кё°мӨҖ л©”мӢңм§Җ 분лҘҳлҘј лӮҳнғҖлӮҙл©° нҳ„мһ¬ 27к°ңмқҳ к·ёлЈ№, 197к°ңмқҳ л©”мӢңм§Җк°Җ м •мқҳлҗҳм–ҙ мһҲлӢӨ[6].
TableВ 3.
Message groupof STANAG 4586 protocol
3.1.5 STANAG 4586 л©”мӢңм§Җ 분м„қ
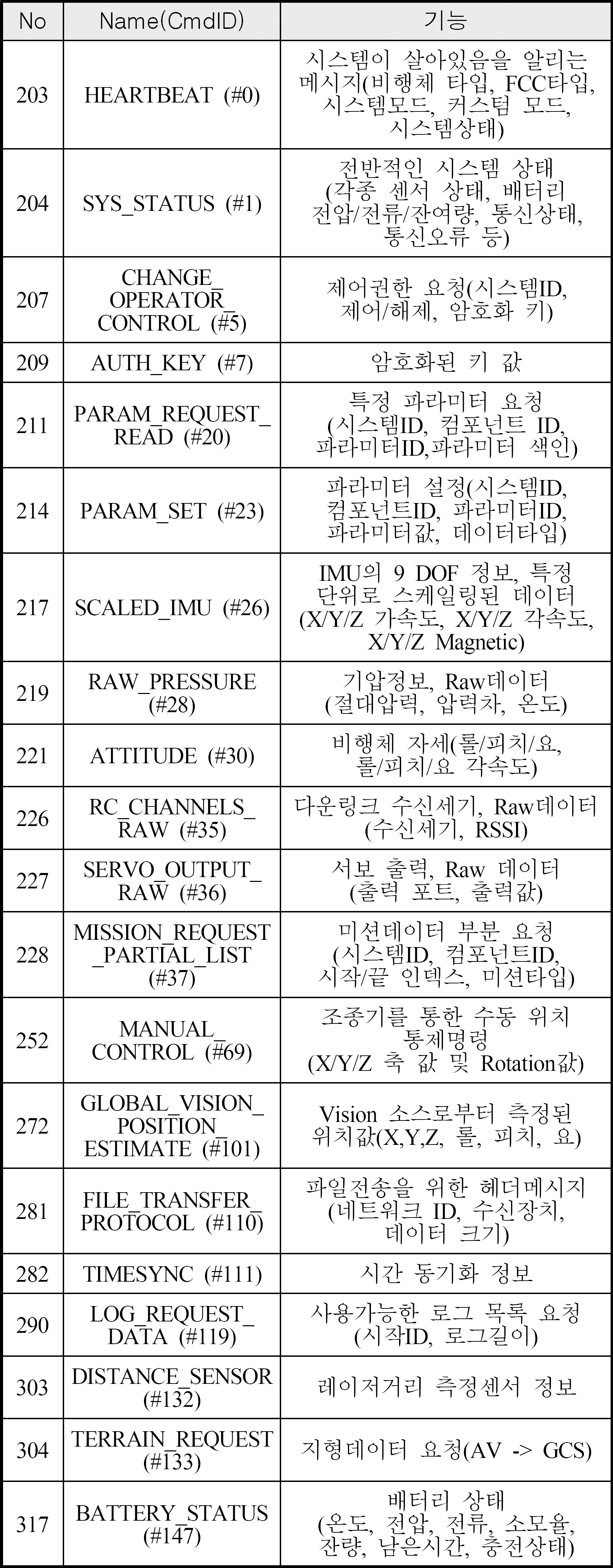
27к°ң л©”мӢңм§Җ к·ёлЈ№м—җ нҸ¬н•Ёлҗң мЈјмҡ” л©”мӢңм§Җлі„ кё°лҠҘмқҖ м•„лһҳмҷҖ к°ҷлӢӨ
3.2 MAVLink мғҒм„ё 분м„қ
3.2.1 MAVLink н‘ңмӨҖ 분м„қ
MAVLink н”„лЎңнҶ мҪңмқҖ л¬ҙмқёкё°м—җм„ң кіөнҶөм ҒмңјлЎң мӮ¬мҡ©н•ҳлҠ” н”„лЎңнҶ мҪңмқ„ Common.xml нҢҢмқјм—җ м •мқҳн•ҳкі нҠ№м • л¬ҙмқёкё°м—җм„ң мӮ¬мҡ©н•ҳлҠ” н”„лЎңнҶ мҪңмқҖ м ңмЎ°мӮ¬лі„лЎң xml нҢҢмқјлЎң м •мқҳн•ҳм—¬ мӮ¬мҡ©н•ҳкі мһҲлӢӨ. кіөнҶөм ҒмңјлЎң мӮ¬мҡ©лҗҳлҠ” Common.xml нҢҢмқјмқҖ м•„лһҳ к·ёлҰјмІҳлҹј MAVLink Type Enumerations, MAVLink Commands, MAVLink Messages м„ё к·ёлЈ№мңјлЎң лӮҳлүҳм–ҙм ё мһҲмңјл©° к·ёмӨ‘ MAVLink Messages к·ёлЈ№м—җ мһҲлҠ” к°Ғ л©”мӢңм§Җл“Өмқҙ мӢӨм ң м—°лҸҷн”„лЎңнҶ мҪң лӮҙмҡ©мқҙл©°, Type Enumerationsкіј CommandsлҠ” Messages лӮҙл¶Җ нҠ№м • н•„л“ңм—җ мқёмҪ”л”©лҗҳм–ҙ м „мҶЎлҗңлӢӨ.

3.2.2 MAVLink н—ӨлҚ” 분м„қ
MAVLink Version1.0 н”„лЎңнҶ мҪңмқҳ н—ӨлҚ” нҸ¬л§·мқҖ м•„лһҳмҷҖ к°ҷлӢӨ.
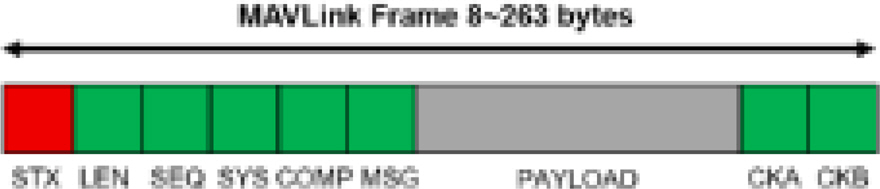
MAVLink Version2.0 н”„лЎңнҶ мҪңмқҳ н—ӨлҚ” нҸ¬л§·мқҖ м•„лһҳмҷҖ к°ҷлӢӨ.

3.2.3 MAVLink л©”мӢңм§Җ 분м„қ
MAVLink 2.0м—җ нҸ¬н•Ёлҗң MAVLink Type Enumerations мЈјмҡ” н•ӯлӘ©мқҳ 분м„қ кІ°кіјлҠ” м•„лһҳмҷҖ к°ҷлӢӨ.
MAVLink 2.0м—җ нҸ¬н•Ёлҗң MAVLink Commands мЈјмҡ” н•ӯлӘ©мқҳ 분м„қ кІ°кіјлҠ” м•„лһҳмҷҖ к°ҷлӢӨ.
MAVLink 2.0м—җ нҸ¬н•Ёлҗң MAVLink Messagesмқҳ 분м„қ кІ°кіјлҠ” м•„лһҳмҷҖ к°ҷлӢӨ.
3.3 STANAG 4586 vs MAVLink
STANAG 4586кіј MAVLinkмқҳ к°Ғ н”„лЎңнҶ мҪңм—җм„ң нҸ¬н•Ён•ҳлҠ” лӘЁл“ л©”мӢңм§Җмқҳ мғҒм„ё 분м„қ кІ°кіјлҘј нҶ лҢҖлЎң м•Ҫ 40м—¬ к°Җм§Җ кё°мӨҖмңјлЎң л©”мӢңм§ҖлҘј 분лҘҳн•ҳм—¬ 비көҗ/분м„қ н•ҳмҳҖлӢӨ.
3.3.1 н”„лЎңнҶ мҪң к°ңл°ң лӘ©м Ғ
| STANAG 4586 | MAVLink |
|---|---|
|
вҖў лӢӨм–‘н•ң кё°мў…мқҳ л¬ҙмқён•ӯкіөкё° мғҒнҳёмҡҙмҡ©мқ„ мң„н•ң м•„нӮӨн…Қ мІҳ' м—°лҸҷн”„лЎңнҶ мҪң' м—°лҸҷм Ҳ м°Ё' кө¬нҳ„ к°Җмқҙл“ңлқјмқё' мӢңн—ҳ к°Җмқҙл“ңлқјмқё л“ұмқ„ м •мқҳ вҖў кө°мӮ¬мҡ©мңјлЎң мӮ¬мҡ©лҗҳлҠ” кұ°мқҳ лӘЁл“ кі м •мқөнҳ• л¬ҙмқёкё° м ң м–ҙлҘј мң„н•ҙ мӮ¬мҡ©лҗҳлҠ” н”„лЎң нҶ мҪң н‘ңмӨҖнҷ”[34,35] |
вҖў лӢӨм–‘н•ң кё°мў…мқҳ мҶҢнҳ• л¬ҙмқё н•ӯкіөкё° нҶөм ңлҘј мң„н•ҙ м§ҖмғҒ нҶөм ңмһҘм№ҳмҷҖ 비н–үмІҙк°„ м—° лҸҷн”„лЎңнҶ мҪң м •мқҳ вҖў лҜјк°„мҡ©мңјлЎң мӮ¬мҡ©лҗҳлҠ” мҶҢ нҳ• л¬ҙмқён•ӯкіөкё°(л“ңлЎ )м ңм–ҙ лҘј мң„н•ҙ мӮ¬мҡ©лҗҳлҠ” н”„лЎңнҶ мҪң н‘ңмӨҖнҷ” |
3.3.2 нҶөм ңлҢҖмғҒ
3.3.3 мЈјмҡ”мһ„л¬ҙ
| STANAG 4586 | MAVLink |
|---|---|
| [кө°мҡ©л¬ҙмқёкё° мһ„л¬ҙ][36] | [мӮ°м—…мҡ©л¬ҙмқёкё° мһ„л¬ҙ][37] |
| вҖў м •ліҙмҲҳ집 мһ„л¬ҙ | вҖў лҶҚм—…(비лЈҢ' лҶҚм•ҪмӮҙнҸ¬' лі‘мӨ‘н•ҙ кҙҖмёЎ' мһ‘нҷ© кҙҖмёЎ' лҶҚкІҪм§Җ/лҶҚмһ‘л¬јкҙҖлҰ¬' нҢҢмў…/л°©м ң) |
| вҖў м •м°° мһ„л¬ҙ | В |
| вҖў кё°л§Ң мһ„л¬ҙ | В |
| вҖў кіөкІ© мһ„л¬ҙ | вҖўмҪҳн…җмё м ңмһ‘ |
| вҖў мһҗнҸӯ мһ„л¬ҙ | вҖў мёЎлҹү/нғҗмӮ¬ |
| вҖў кё°лҸҷ м Җм§Җ мһ„л¬ҙ | вҖў кұҙ축/нҶ лӘ© |
| вҖў нҷ”мғқл°© мһ„л¬ҙ | вҖў м җкІҖ |
| вҖў мЎ°лӘ… м§Җмӣҗ мһ„л¬ҙ | вҖў мҶҢл°© |
| вҖў м—°л§ү нҲ¬н•ҳ мһ„л¬ҙ | вҖў мҲҳмҶЎ(кө¬нҳёл¬јн’Ҳ мҲҳмҶЎ) |
| вҖў нҸӯнғ„ нҲ¬н•ҳ мһ„л¬ҙ | вҖў кІҪм°°(көҗнҶөлӢЁмҶҚ' мӢӨмў…мһҗ мҲҳмғү)[38] |
| вҖў м§Җлў° нғҗм§Җ мһ„л¬ҙ | В |
| вҖў нҶөмӢ мӨ‘кі„ мһ„л¬ҙ | вҖў нҷҳкІҪ(л…№мЎ°лӘЁлӢҲн„°л§Ғ' мғқнғңкі„ мЎ°мӮ¬) |
| вҖў нҷ”л¬јмҡҙмҶЎ мһ„л¬ҙ | В |
| вҖў м „мһҗм „ мһ„л¬ҙ | вҖў кё°мғҒмҳҲліҙм§Җмӣҗ[39] |
| вҖў м „нҲ¬н”јн•ҙнҸүк°Җ мһ„л¬ҙ | В |
| вҖў көӯкІҪ к°җмӢң мһ„л¬ҙ | В |

3.3.6 н‘ңмӨҖнҷ” нҠ№м§•
3.3.8 н—ӨлҚ” кө¬мЎ°
3.3.9 н—ӨлҚ” нҠ№м§•
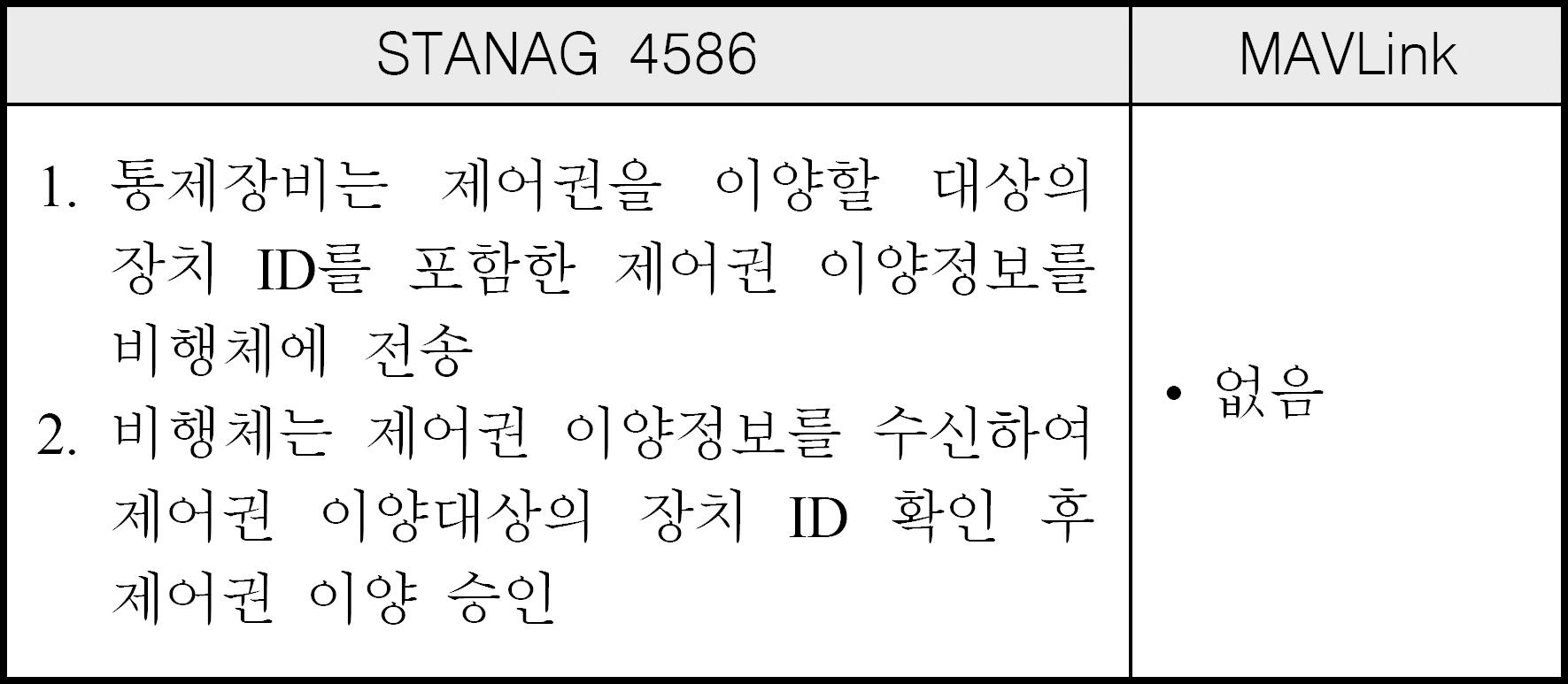
3.3.11 нҶөм ңмһҘ비мҷҖ 비н–үмІҙк°„ мқёмҰқ
3.3.13 비н–үм ңм–ҙ нҢҢлқјлҜён„° м„Өм •
3.3.14 비н–үмў…лЈҢ нҶөм ң
| STANAG 4586 | MAVLink |
|---|---|
| вҖў 비н–үмў…лЈҢ лӘ…л № мқҙнӣ„ мҲҳн–үн•ҙм•јн• лҢҖмІҳл°©м•Ҳмқ„ мӮ¬м „ м •мқҳн•ҳм—¬ 비н–ү мў…лЈҢ к°ҖлҠҘ(Ex. 비н–ү мў…лЈҢ мӢң лӮЁм•„ мһҲлҠ” м—°лЈҢлҘј лӢӨ лІ„лҰ¬кі нҠ№м • мң„ м№ҳм—җ 추лқҪ) | вҖў нҳ„мһ¬ мң„м№ҳм—җм„ң мҰү мӢң 비н–үмў…лЈҢ.(нҡҢм „ мқөнҳ• мҶҢнҳ•л“ңлЎ мқҳ кІҪмҡ° лӘЁн„° нҡҢм „мқҙ л©Ҳ추лҠ” мҰүмӢң м ңмһҗ лҰ¬м—җ 추лқҪ) |
| вҲ’ кі м •мқө н•ӯкіөкё°лҠ” 엔진 м •м§Җмқҙнӣ„ м—җлҸ„ мқјм • мҶҚлҸ„ мқҙмғҒм—җм„ңлҠ” нҷң к°•мқҙ к°ҖлҠҘн•ҳлҜҖлЎңпјҢнҷңк°•н•ҳм—¬ мқҙлҸҷ к°ҖлҠҘн•ң м§Җм җмқ„ м„ нғқн•ҳм—¬ 비н–үмў… лЈҢ(추лқҪ) к°ҖлҠҘ.[33] | В |

3.3.17 мҡҙмҡ©к°ңл…җ 추к°Җм •мқҳ
3.3.18 비н–үмІҙ нҠ№м„ұ лҸҷкё°нҷ”
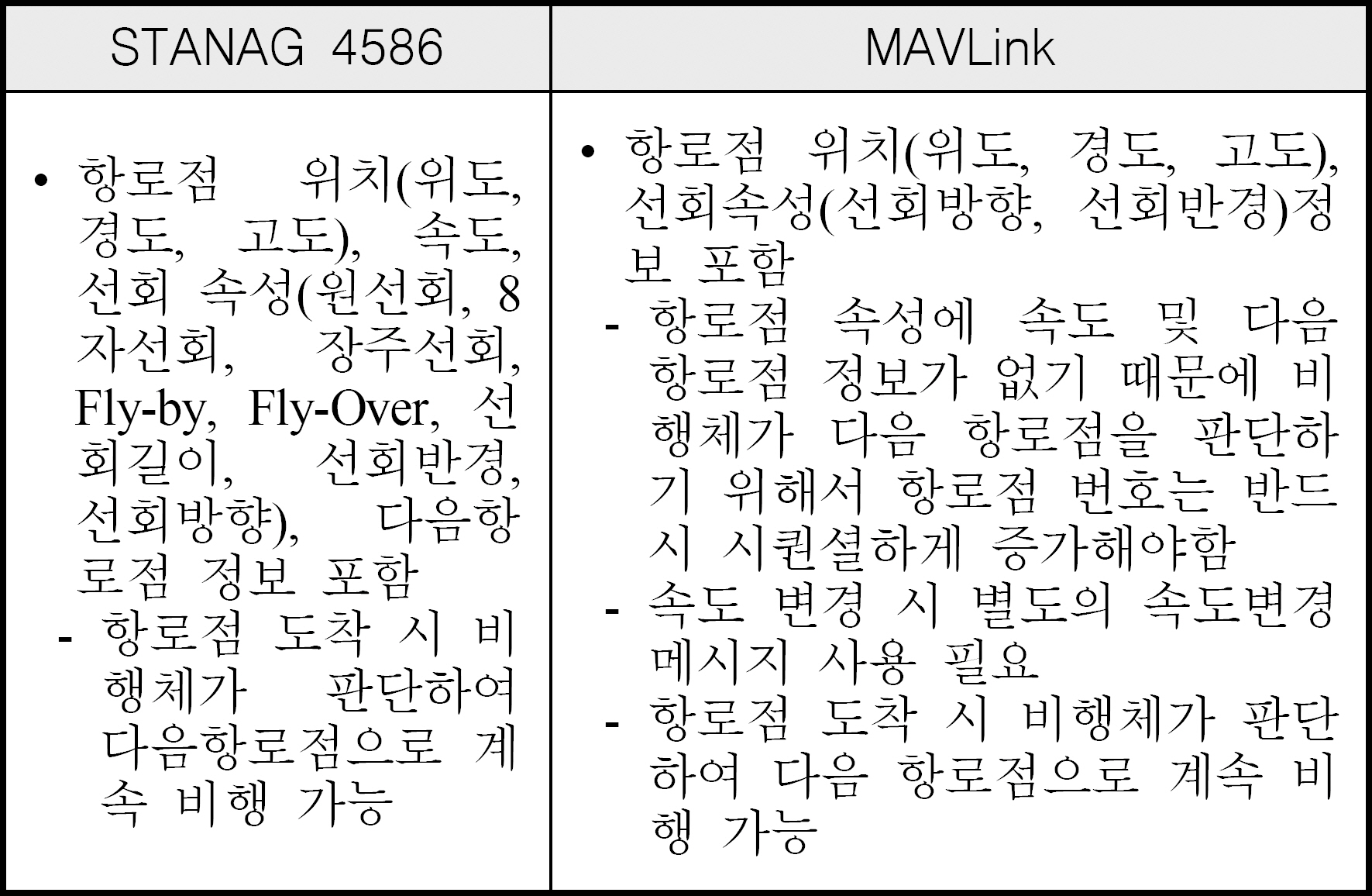
3.3.20 мһ„л¬ҙкі„нҡҚ кө¬м„ұ
3.3.22 мһ„л¬ҙмһҘ비 мһ„л¬ҙкі„нҡҚ
3.3.23 비мғҒкі„нҡҚ
3.3.26 м§Җнҳ•м •ліҙ
3.3.29 비н–үмІҙ кі„нҶө нҶөм ң
3.3.30 мһҗмңЁмһ„л¬ҙ нҶөм ң
3.3.31 비н–үлӘЁл“ң
3.3.32 비н–үмғҒнғң
3.3.33 мһ„л¬ҙмһҘ비 мғҒнғң
3.3.34 мһ„л¬ҙмһҘ비 нҶөм ң
3.3.35 кё°нғҖ нҠ№м§•
к°ңм„ мӮ¬н•ӯ лҸ„м¶ң
STANAG 4586кіј MAVLink н”„лЎңнҶ мҪңмқҳ мғҒм„ё л©”мӢңм§Җ 분м„қ кІ°кіј м•„лһҳ н‘ңмҷҖ к°ҷмқҙ 41к°ңмқҳ н•ӯлӘ©мқ„ 비көҗ/분м„қн•ҳм—¬ н•ӯлӘ©лі„лЎң к°ңм„ мӮ¬н•ӯмқ„ лҸ„м¶ңн•ҳмҳҖмңјл©°, ліё м—°кө¬м—җм„ңлҠ” нҠ№нһҲ л‘җ н”„лЎңнҶ мҪңм—җм„ң л°ңкІ¬лҗҳм§Җ м•ҠлҠ” кіЎм„ нҳ• 비н–үкІҪлЎң кі„нҡҚм—җ лҢҖн•ң к°ңм„ мӮ¬н•ӯмқ„ мғҒм„ёнһҲ м—°кө¬н•ҳмҳҖлӢӨ.
4.1 н”„лЎңнҶ мҪң к°ңм„ мӮ¬н•ӯ мҡ”м•Ҫ
4.2 비н–үкІҪлЎңкі„нҡҚ к°ңм„ мӮ¬н•ӯ
4.2.1 кіЎм„ нҳ• 비н–үкІҪлЎңкі„нҡҚ
STANAG 4586мқҖ NATO нҡҢмӣҗкөӯк°„ мғҒнҳё мҡҙмҡ©мқҙ к°ҖлҠҘн•ң л¬ҙкё°мІҙкі„ к°ңл°ңмқ„ мң„н•ҙ л¬ҙмқёкё°(UAV)мҷҖ м§ҖмғҒнҶөм ңмӢңмҠӨн…ң(GCS)к°„ м—°лҸҷ мқён„°нҺҳмқҙмҠӨлҘј м •мқҳн•ң л¬ём„ңлЎң л§ҺмқҖ көӯк°Җм—җм„ң л¬ҙмқёкё° к°ңл°ң мӢң м°ёкі н•ҳлҠ” н‘ңмӨҖмқҙл©° MAVLink лҳҗн•ң лҜјк°„м—җм„ң мӮ¬мҡ©н•ҳлҠ” мӮ¬мӢӨмғҒмқҳ н‘ңмӨҖмқҙм§Җл§Ң л‘җ н‘ңмӨҖ лӘЁл‘җ л¬ҙмқёкё°м—җ лҢҖн•ң 비н–үкІҪлЎң кі„нҡҚмӢң м§Ғм„ нҳ• кІҪлЎңл§Ңмқ„ нҸ¬н•Ён•ҳкі мһҲм–ҙ мҡҙмҡ©мһҗк°Җ мӣҗн•ҳлҠ” нҳ•нғңмқҳ лӢӨм–‘н•ң кіЎм„ нҳ• 비н–үкІҪлЎңлҘј мһ‘м„ұн• мҲҳ м—ҶлҠ” лӢЁм җмқҙ мһҲлӢӨ. м•„мЈј 짧мқҖ кө¬к°„мқҳ м§Ғм„ нҳ• н•ӯлЎңм җмқ„ мқҙм–ҙл¶ҷмқҙлҠ” л°©лІ•мңјлЎң кіЎм„ нҳ• 비н–үкі„нҡҚмқ„ мҲҳлҰҪ н• мҲҳ мһҲмңјлӮҳ мқҙлҹ¬н•ң 비н–үкІҪлЎң кі„нҡҚмқҖ м •нҷ•н•ң кіЎм„ мқ„ н‘ңнҳ„н•ҳм§Җ лӘ»н• лҝҗ м•„лӢҲлқј 비н–үкі„нҡҚ м—…лЎңл“ңлҘј мң„н•ҙ л§ҺмқҖ лҚ°мқҙн„°к°Җ лӮӯ비лҗҳм—ҲлӢӨ. STANAG 4586мқҳ мқҙлҹ¬н•ң 비н–үкІҪлЎң кі„нҡҚмқҳ л¬ём ңм җмқ„ н•ҙкІ°н•ҳкё° мң„н•ҙ 비н–үкІҪлЎңкі„нҡҚм—җ мӮ¬мҡ©лҗҳлҠ” Generic Message м—җ кіЎм„ нҳ• 비н–үкІҪлЎң кі„нҡҚмқ„ мң„н•ҙ н•„мҡ”н•ң Private Msg лҘј 추к°Җн•ҳм—¬ кіЎм„ нҳ• 비н–үкІҪлЎңлҘј мһ‘м„ұн•ҳлҠ” л°©м•Ҳм—җ лҢҖн•ҙ м ңм•Ҳн•ңлӢӨ.
л¬ҙмқёкё° мҡҙмҡ©м—җм„ң мӨ‘мҡ”н•ң мҡ”мҶҢ мӨ‘ н•ҳлӮҳлҠ” 비н–үкІҪлЎңкі„нҡҚ(flight path planning)мқҙлӢӨ. 비н–үкІҪлЎңкі„нҡҚмқҙлһҖ нҳ„мһ¬ мң„м№ҳлЎңл¶Җн„° лӘ©м Ғм§Җм—җ лҸ„лӢ¬н•ҳлҠ” кіјм •м—җм„ң кұёлҰ¬лҠ” мӢңк°„мқҙлӮҳ кұ°лҰ¬, м—°лЈҢмҶҢлӘЁмңЁ л“ұмқ„ кі л Өн•ҳм—¬ нҡЁкіјм Ғмқё мқҙлҸҷ кІҪлЎңлҘј мӮ¬м „м—җ кі„нҡҚн•ҳлҠ” кІғмқҙлӢӨ. нҡЁкіјм Ғмқё 비н–үкІҪлЎңкі„нҡҚмқ„ мһ‘м„ұн•ҳкё° мң„н•ҙм„ңлҠ” мӣҗн•ҳлҠ” нҳ•нғңмқҳ лӢӨм–‘н•ң 비н–үкІҪлЎңлҘј мһ‘м„ұн• мҲҳ мһҲм–ҙм•ј н•ңлӢӨ. к·ёлҹ¬лӮҳ STANAG 4586 мқҖ м§Ғм„ нҳ• н•ӯлЎңм җл“Өмқҳ мЎ°н•©л§Ң мЎҙмһ¬ н• лҝҗ кіЎм„ нҳ• 비н–үкІҪлЎңлҘј мһ‘м„ұн• мҲҳ м—Ҷкё° л•Ңл¬ём—җ мҡҙмҡ©мһҗк°Җ кіЎм„ нҳ• 비н–үкІҪлЎңлҘј мһ‘м„ұн•ҳлҠ” кІғмқҙ л¶Ҳк°ҖлҠҘн•ҳлӢӨ. мҡ”мҰҳ лҜј/кө°м—җм„ң мӮ¬мҡ©лҗҳлҠ” л¬ҙмқёкё°лҠ” мҲҳ kgм—җм„ң мҲҳмІң kg к№Ңм§Җ лӢӨм–‘н•ң нҳ•нғңлЎң к°ңл°ңлҗҳкі мһҲмңјл©° мӣҗн•ҳлҠ” нҳ•нғңмқҳ лӢЁлҸ…мһ„л¬ҙлҘј мң„н•ң кіЎм„ л№„н–ү л°Ҹ кө°м§‘비н–ү л“ұмқ„ мң„н•ҙм„ңлҸ„ кіЎм„ нҳ• 비н–үкІҪлЎң мһ‘м„ұмқҖ л°ҳл“ңмӢң н•„мҡ”н•ң мғҒнҷ©мқҙлӢӨ.
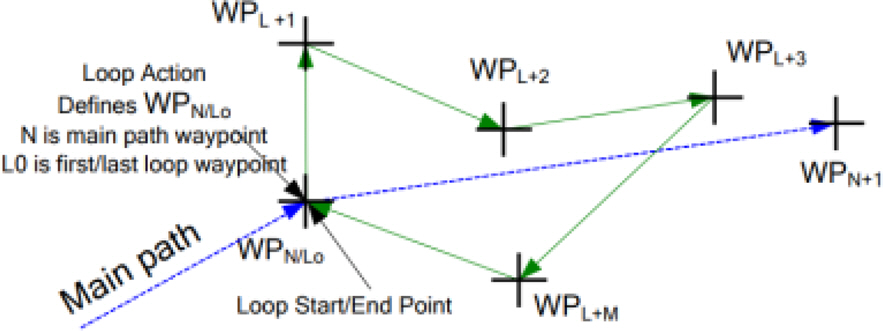
STANAG 4586 Ed4 кё°мӨҖмқҳ Message #13002(UA Position Waypoint) мқҳ лӮҙмҡ©мқ„ мӮҙнҺҙліҙл©ҙ н‘ңмӨҖм„ңм—җм„ң 비н–үкІҪлЎңлҘј мһ‘м„ұн•ҳлҠ” л°©лІ•мқҖ Pig. 1кіј к°ҷмқҙ нҳ„мһ¬ н•ӯлЎңм җ вҖ“ лӢӨмқҢ н•ӯлЎңм җмқҳ мЎ°н•©мңјлЎң мқҙлЈЁм–ҙм§ҖлҠ” мқјл°ҳ 비н–үкІҪлЎң(нҢҢлһ‘ м җм„ )мҷҖ нҳ„мһ¬ н•ӯлЎңм җ вҖ“ лЈЁн”„н•ӯлЎңм җмқҳ мЎ°н•©мңјлЎң мқҙлЈЁм–ҙм§ҖлҠ” мҲңнҷҳкІҪлЎң(л…№мғүмӢӨм„ )мңјлЎң кө¬м„ұлҗңлӢӨ.
#13003 л©”мӢңм§Җм—җлҠ” нҠ№м • н•ӯлЎңм җм—җм„ң м„ нҡҢ к°ҖлҠҘн•ң лӢӨм–‘н•ң нҳ•нғң(мӣҗ м„ нҡҢ, мһҘмЈјм„ нҡҢ, 8мһҗм„ нҡҢ)мҷҖ к°Ғ м„ нҡҢ нҳ•нғңм—җ л”°лҘё м„ нҡҢмҶҚм„ұ(м„ нҡҢ л°ҳкІҪ, м„ нҡҢкёёмқҙ, м„ нҡҢ к°ҒлҸ„)мқҙ мЎҙмһ¬н•ҳл©° #13002, #13003 л©”мӢңм§ҖлҘј нҶөн•ҙ 비н–үкІҪлЎң мҷҖ 비н–үкІҪлЎңм—җм„ң м·Ён•ҙм§ҖлҠ” м„ нҡҢ нҳ•нғңлҘј кІ°м •н•ҳкІҢ лҗңлӢӨ. к·ёлҹ¬лӮҳ л§Ңм•Ҫ мҡҙмҡ©мһҗк°Җ м•„лһҳк·ёлҰјмІҳлҹј лё”лһҷмқҙкёҖмҠӨмқҳ кө°м§‘비н–үнҳ•нғңмқҳ мһ„л¬ҙкі„нҡҚмқ„ мһ‘м„ұн•ҳкі мһҗ н•ҳкұ°лӮҳ л“ңлЎ л ҲмқҙмӢұмқ„ мһҗлҸҷмңјлЎң мҲҳн–үн•ҳлҠ” мһ„л¬ҙкі„нҡҚмқ„ мһ‘м„ұн•ҳкі мһҗ н•ңлӢӨл©ҙ STANAG 4586 н‘ңмӨҖмңјлЎңлҠ” л¶Ҳк°ҖлҠҘн•ң мғҒнғңмқҙлӢӨ.

4.2.2 кіЎм„ мқ„ н‘ңнҳ„н•ҳлҠ” Spline н•ЁмҲҳ
кіЎм„ мқ„ н‘ңнҳ„н•ҳлҠ” лҢҖн‘ңм Ғмқё мҠӨн”Ңлқјмқё н•ЁмҲҳлҠ” LINEAR SPLINE, CARDINAL SPLINE, B-SPLINE, BEZIER CURVE, NURBS л“ұмқҙ мһҲлӢӨ. ліё л…јл¬ём—җм„ңлҠ” м—¬лҹ¬ мҠӨн”Ңлқјмқё н•ЁмҲҳ мӨ‘м—җм„ң көӯл¶Җм ңм–ҙк°Җ к°ҖлҠҘн•ҳл©° мӣҗн•ҳлҠ” нҳ•нғңмқҳ кіЎм„ мқ„ мғқм„ұ н• мҲҳ мһҲлҠ” cubic bezier curve(3м°Ё лІ м§Җм—җ кіЎм„ )лҘј м„ нғқн•ҳмҳҖлӢӨ. көӯл¶Җм ңм–ҙлһҖ нҳ„мһ¬ н•ӯлЎңм„ мқ„ мҲҳм •н•ҳлҚ”лқјлҸ„ лӢӨлҘё н•ӯлЎңм„ м—җлҠ” мҳҒн–Ҙмқ„ лҜём№ҳм§Җ м•ҠлҠ” кІғмқ„ мқҳлҜён•ңлӢӨ.
ліё л…јл¬ём—җ м Ғмҡ©н•ң cubic bezier curveмқҳ мҲҳмӢқ л°Ҹ к°ңл…җмқҖ лӢӨмқҢкіј к°ҷлӢӨ.
4.2.3 STANAG 4586м—җ кіЎм„ кІҪлЎңлҘј нҸ¬н•Ён•ҳлҠ” л°©м•Ҳ
кіЎм„ л№„н–үкІҪлЎңк°Җ нҸ¬н•Ёлҗң н•ӯлЎңм җм—җ лҢҖн•ҙ Private Msg лҘј м•„лһҳ к·ёлҰјкіј к°ҷмқҖ нҳ•нғңлЎң м •мқҳн•ҳмҳҖлӢӨ. мӣҗлһҳ н•ӯлЎңм җ P1, P4лҠ” #13002 л©”мӢңм§ҖлҘј нҶөн•ҙ мң„м№ҳ нҷ•мқёмқҙ к°ҖлҠҘн•ҳлҜҖлЎң кіЎм„ нҳ• 비н–үкІҪлЎңк°Җ нҸ¬н•Ёлҗң P1, P4 мўҢн‘ңм—җ P2, P3 мўҢн‘ңл§Ң 추к°Җн•ҙ мӨҖлӢӨл©ҙ кіЎм„ нҳ• кІҪлЎң кі„нҡҚмқ„ мһ‘м„ұн• мҲҳ мһҲмңјлҜҖлЎң м•„лһҳмҷҖ к°ҷмқҖ Private MsgлҘј м •мқҳн•ҳмҳҖлӢӨ.
нҡЁкіј 분м„қ л°Ҹ кІ°кіј
мҡ©мқём—җлІ„лһңл“ң мҠӨн”јл“ңмӣЁмқҙмқҳ мқјл¶Җ кө¬к°„мқ„ м§Ғм„ нҳ• кІҪлЎңмҷҖ кіЎм„ нҳ• кІҪлЎңлҘј мӮ¬мҡ©н•ҳм—¬ 비көҗн•ҙліҙм•ҳлӢӨ. м§Ғм„ нҳ• кІҪлЎңмқҳ кІҪмҡ° 20к°ңмқҳ н•ӯлЎңм җмқ„ мӮ¬мҡ©н•ҳмҳҖмқҢм—җлҸ„ л¶Ҳкө¬н•ҳкі кіЎм„ мқ„ 충분нһҲ н‘ңнҳ„н•ҙ мЈјм§Җ лӘ»н•ҳмҳҖмңјлӮҳ м ңм•Ҳн•ҳлҠ” м•Ңкі лҰ¬мҰҳмқ„ мӮ¬мҡ©н•ҳл©ҙ 9к°ңмқҳ н•ӯлЎңм җ л§ҢмңјлЎңлҸ„ мӣҗн•ҳлҠ” нҳ•нғңмқҳ кіЎм„ кІҪлЎңмҷҖ мҷ„лІҪнһҲ мқјм№ҳн•ҳлҠ” кІҪлЎңлҘј мғқм„ұ н• мҲҳ мһҲмқҢмқ„ нҷ•мқён• мҲҳ мһҲм—ҲлӢӨ. м•„лһҳмқҳ к·ёлҰјмқҳ мҡ°мёЎнҺёмқҙ кіЎм„ нҳ• кІҪлЎңлҘј мӮ¬мҡ©н•ң кІҪмҡ°мқҙл©° мҙҲлЎқмғүмқҙ мӢӨм ң кіЎм„ нҳ• кІҪлЎңмқҙкі л№Ёк°•мғү м§Ғм„ лқјмқёмқҖ ліҙмЎ°м җ P2, P3лҘј лӮҳнғҖлӮҙлҠ” м§Җм җмқҙлӢӨ.

м ңм•Ҳн•ҳлҠ” м•Ңкі лҰ¬мҰҳмқ„ мӮ¬мҡ©н•ҳм—¬ н‘ңнҳ„ к°ҖлҠҘн•ң лӢӨм–‘н•ң нҳ•нғңмқҳ кіЎм„ нҳ• 비н–үкІҪлЎңлҠ” м•„лһҳ к·ёлҰјкіј к°ҷлӢӨ. 2к°ңмқҳ н•ӯлЎңм җкіј 2к°ңмқҳ ліҙмЎ°м җмқ„ нҷңмҡ©н•ҳл©ҙ м–ҙл– н•ң кіЎм„ нҳ• 비н–үкІҪлЎңлқјлҸ„ н‘ңнҳ„н• мҲҳ мһҲмқҢмқ„ мһ…мҰқн•ҳмҳҖлӢӨ.

кІ°лЎ л°Ҹ н–Ҙнӣ„ м—°кө¬
ліё м—°кө¬лӮҙмҡ©мқҖ көӯ/лӮҙмҷё м–ҙл–Ө л…јл¬ём—җм„ңлҸ„ н”„лЎңнҶ мҪң м „мІҙ лӮҙмҡ©мқ„ лҢҖмғҒмңјлЎң мғҒм„ё 비көҗм—°кө¬лҘј мҲҳн–үн•ң м Ғмқҙ м—Ҷм—Ҳкё°м—җ лҜј/кө° л¬ҙмқён•ӯкіөкё° мғҒнҳёмҡҙмҡ©м„ұмқ„ н–ҘмғҒмӢңнӮӨкё° мң„н•ң мөңмҙҲмқҳ м—°кө¬мқҙлӢӨ.
STANAG 4586н‘ңмӨҖкіј MAVLink н”„лЎңнҶ мҪңмқҳ лӘЁл“ нҠ№м§•мқ„ 분м„қ/분лҘҳн•ҳм—¬ л‘җ н”„лЎңнҶ мҪңмқҳ мғҒнҳё ліҙмҷ„м Ғмқё мҡ”мҶҢлҘј мӢқлі„н•ҳкі мӨ‘мҡ”н•ң к°ңл…җм—җ лҢҖн•ҙм„ңлҠ” 추к°Җм Ғмқё м„Өкі„лҘј 진н–үн•ҳмҳҖлӢӨ. лҳҗн•ң л‘җ н”„лЎңнҶ мҪңм—җм„ң кіөнҶөм ҒмңјлЎң л°ңкІ¬лҗҳлҠ” 비н–үкІҪлЎң кі„нҡҚмқҳ к°ңм„ мӮ¬н•ӯмқ„ мӢқлі„н•ҳм—¬ кіЎм„ нҳ• 비н–үкІҪлЎңкі„нҡҚмқ„ 추к°Җн•ҳлҠ” л°©м•Ҳм—җ лҢҖн•ҙ м ңм•Ҳн•ҳмҳҖлӢӨ. кіЎм„ мқ„ н‘ңнҳ„н•ҳкё° мң„н•ҙ н•„мҡ”н•ң 추к°Җм Ғмқё л©”мӢңм§ҖлҘј м •мқҳн•Ём—җ мһҲм–ҙ мөңмҶҢн•ңмқҳ лҚ°мқҙн„° 추к°Җл§ҢмңјлЎң мҡҙмҡ©мһҗк°Җ мӣҗн•ҳлҠ” мҷ„лІҪн•ң нҳ•нғңмқҳ кіЎм„ нҳ• 비н–үкІҪлЎңлҘј 추к°Җн•ҳлҠ” л°©м•Ҳмқ„ м ңм•Ҳн•ҳмҳҖкі , мӢӨм ң н”„лЎңк·ёлһЁ кө¬нҳ„мқ„ нҶөн•ҙ мһ…мҰқн•ҳмҳҖлӢӨ. л¬ҙмқё мқҙлҸҷмІҙлҘј нҶөм ңн•ҳкё° мң„н•ҙ лӢӨм–‘н•ң н”„лЎңнҶ мҪңмқҙ к°ңл°ңлҗҳкі мһҲлҠ” нҳ„ мӢңм җм—җм„ң н”„лЎңнҶ мҪң к°„мқҳ м°Ёмқҙм җмқ„ мӢқлі„н•ҳм—¬ мғҒнҳё ліҙмҷ„м Ғмқё мҡ”мҶҢлҘј м°ҫм•„ ліҙмҷ„ м„Өкі„лҘј 진н–үн•ҳкі н”„лЎңнҶ мҪңмқ„ м—…лҚ°мқҙнҠё н•ңлӢӨл©ҙ кІ°көӯ мғҒнҳёмҡҙмҡ©мқҙ к°ҖлҠҘн•ң лӢЁмқјнҷ”лҗң н”„лЎңнҶ мҪңмқ„ к°ңл°ңн•ҳлҠ” мҙҲм„қмқҙ лҗ кІғмқҙлқј мғқк°Ғн•ңлӢӨ.
н–Ҙнӣ„ л¬ҙмқён•ӯкіөкё°лҘј нҶөм ңн•ҳлҠ” н”„лЎңнҶ мҪңм—җм„ң лІ—м–ҙлӮҳ л¬ҙмқёмҲҳмғҒм •, л¬ҙмқёмһ мҲҳм •, л¬ҙмқём§ҖмғҒм°Ёлҹү л“ұмңјлЎң н”„лЎңнҶ мҪңмқ„ нҷ•лҢҖн•ҳм—¬ лӘЁл“ л¬ҙмқё мқҙлҸҷмІҙ нҶөм ңлҘј мң„н•ҙ мөңм Ғнҷ”лҗң н”„лЎңнҶ мҪң к°ңл°ңмқ„ мң„н•ң 추к°Җ м—°кө¬к°Җ н•„мҡ”н•ҳлӢӨ.




