비파괴검사를 위한 검출기 이동 방법과 논블라인드 디컨볼루션 순차 적용에 따른 이미지 해상도 증가 연구
A Study on Image Resolution Increase According to Sequential Apply Detector Motion Method and Non-Blind Deconvolution for Nondestructive Inspection
Article information
Abstract
Non-destructive inspection using X-rays is used as a method to check the inside of products. In order to accurately inspect, a X-ray image requires a higher spatial resolution. However, the reduction in pixel size of the X-ray detector, which determines the spatial resolution, is time-consuming and expensive. In this regard, a DMM has been proposed to obtain an improved spatial resolution using the same X-ray detector. However, this has a limitation that the motion blur phenomenon, which is a decrease in spatial resolution. In this paper, motion blur was removed by applying Non-Blind Deconvolution to the DMM image, and the increase in spatial resolution was confirmed. DMM and Non-Blind Deconvolution were sequentially applied to X-ray images, confirming 62 % MTF value by an additional 29 % over 33 % of DMM only. In addition, SSIM and PSNR were compared to confirm the similarity to the 1/2 pixel detector image through 0.68 and 33.21 dB, respectively.
1. 서 론
1895년 뢴트겐에 의한 X-ray 발견 이후 20세기 반도 체 산업의 발전에 따라 저장 공간의 소형화, 빠른 이미지 획득 및 추가 이미지 처리 등의 특징을 가지는 디지털 X-ray 검출기가 개발되었다[1–3]. 디지털 X-ray 이미지는 물리적 파괴 없이 물체 내부를 확인 할 수 있는 장점 때문에 병변 및 질병 확인을 위한 의료뿐만 아니라 제품 이상 여부나 결함의 정도를 확인하는 X-ray 비파괴 검사로 많이 사용된다[4,5]. 특히 무기 분야의 비파괴 검사를 통한 안전검사는 탄 운용 시 생명과 직결되는 사항이므로 보다 정밀한 X-ray 이미지를 필요로 한다[6]. 정밀한 X-ray 이미지는 높은 공간 해상도를 의미하며, 이는 사용된 X-ray 검출기의 pixel 크기에 의해 결정된다. Pixel 크기가 작을수록 보다 높은 공간 해상도 이미지를 얻을 수 있다. 그러나 X-ray 비파괴 검사를 위한 시스템이 구축된 후에는 X-ray 검출기의 변경 없이는 공간 해상도 추가 증가는 불가능했다. 이를 해결하기 위하여 X-ray 검출기의 교체 없이 X-ray 이미지의 공간 해상도를 높이는 검출기 이동 방법(Detector Motion Method, DMM)에 관한 연구가 있었다[7]. 해당 연구는 검출기를 미세하게 움직여 중복 촬영한 이미지를 합성하는 방법이다. 이는 촬영 물체를 미세하게 움직여 촬영하는 방법으로도 적용이 된다. 따라서 컨베이어 벨트를 이용하여 이동 간 물체를 촬영하는 무기 분야 X-ray 비파괴 검사에도 적용할 수 있는 기술이다. 하지만 해당 연구는 추가 획득 이미지의 중첩으로 인해 최종 DMM 이미지에 모션 블러(Motion blur) 현상을 피할 수 없다. Motion blur 현상은 공간 해상도 향상을 제한하는 요소이다.
본 연구에서는 DMM을 통해 얻은 X-ray 이미지에 논블라인드 디컨볼루션(Non-Blind Deconvolution, NBD)를 추가 적용하여 Motion blur 현상을 제거하였다. 이를 통해 기존 DMM 이미지보다 증가된 공간 해상도 이미지를 얻을 수 있었다. 본 연구는 X-ray 튜브 전압 80 keV, 전류 2 μA에서 촬영한 이미지를 획득하여 사용하였다. X-ray 튜브와 촬영체 사이의 거리는 58 cm 이며, X-ray 튜브와 검출기 사이의 거리는 60 cm로 설정하여 촬영하였다. Dose normalisation은 하지 않으며 flactfield correction을 통해 촬영되었다. 픽셀 이미지의 노출 시간은 300 msec 이며, DMM 이미지의 경우 노출 시간은 반복수에 따라 조절된다. 예를 들어 최종 DMM 이미지의 노출 시간을 같게 하기 위해 4-S/2-M DMM 이미지는 한 이미지 당 150 msec 노출시킨다. 10 msec당 1 mm2 면적에 입사된 X-ray 광자의 총 수는 Fig. 1과 같으며 노출시간에 따라 영상의 intensity 가 다르지 않음을 확인하였다. 실험 장치 구성은 Fig. 2와 같이 Step Motor를 2개 사용하여 5 μm 스케일로 x축과 y축을 컨트롤 하였다(±5 %). 55 μm-pixel 이동시 약 11 mesc 소요된다. 사용한 X-ray 검출기는 CdTe 물 질을 사용한 직접방식 검출기, UNO-XRI(55 × 55 μm2 pixel, 256 × 256 pixels)를 사용하였다. 본 논문에서는 기준 X-ray 이미지로 110 × 110 μm2 pixel, 128 × 128 pixels 이미지(110 μm-pixel 이미지)를 사용하였다. 이를 위해 UNO-XRI 검출기로 획득한 X-ray 이미지(55 μm-pixel 이미지)를 2 × 2 binning(2 × 2 pixels 값들을 평균 내어 대표 pixel 값으로 나타냄)을 통해 110 μm-pixel 이미지를 얻었다. 55 μm-pixel 이미지, 110 μm-pixel 이미지, 110 μm pixel 이미지에 DMM을 적용한 4-S/2-M DMM 이미지(Virtual 55 μm-pixel, 256 × 256 pixels), 4-S/2-M DMM 이미지에 NBD를 적용한 4-S/2-M DMM-NBD 이미지 3개(Vitual 55 μm-pixel, 256 × 256 pixels) 총 6종의 이미지를 이용하여 이미지 비교 평가 하였다. 공간 해상도 성능 확인을 위해 MTF (Modulation Transfer Function) 평가를 하였으며, 55 μm-pixel 이미지 대비 손실 정도인 PSNR(Peak Signal to Noise Ratio)과 인간의 시각적 화질 차이 및 유사도인 SSIM(Structural SIMilarity) 인자를 통해 상호 비교하였다.

The total number of X-ray photons projected on area of 1 mm2 per 10 msec; mean = 2.0453*105, standard deviation = 1.08623*103

Experimental setup
2. 제안된 방법
2.1 DMM
DMM은 기존 보유한 X-ray 검출기로 획득한 이미지와 X-ray 검출기의 pixel 크기보다 작은 이동 후 획득한 추가 이미지를 이용하는 기술이다. 미세 움직임 후 촬영한 추가 이미지를 검출기 이동 위치를 고려하여 기존 획득한 이미지와 중첩시켜 최종 DMM 이미지를 만들어 이미지의 공간 해상도 향상을 얻는다. DMM 이미지를 얻기 위해선 검출기 pixel을 세부적으로 나누는 Segmentation 요소와 Segmentation 영역 중 실제 이동한 Motion 요소가 있다.
Fig. 3은 4-Segmentation/2-Motion(4-S/2-M) DMM 이미지 획득 원리를 110 μm-pixel 검출기를 가정하여 나타낸 그림이다. 110 μm-pixel 검출기를 Motion 없이 획득한 110 μm-pixel 이미지와 x축, y축 방향으로 각각 55 μm 만큼 이동(2-Motion, −45° Motion) 후 획득한 이미지를 촬영한 위치를 고려하여 두 이미지를 중첩함으로써 4-S/2-M DMM 이미지를 획득할 수 있다. 110 μm-pixel 이미지에서 명확히 구별되지 않는 물체가 4-S/2-M DMM 이미지에서 구별이 되었다. 결국 검출기 변경 없이 공간 해상도가 증가된 4-S/2-M DMM 이미지를 얻을 수 있다.

The principle of 4-S/2-M Detector Motion Method(DMM)
하지만 Fig. 3의 4-S/2-M DMM 이미지의 경우 −45° Motion에 의해 물체 주변에 신호가 번지는 Motion blur 현상이 발생하게 된다. 4-S/2-M DMM 이미지의 공간 해상도 증가를 제한하는 Motion blur 현상은 NBD 방법을 통해 제거하는 연구들이 발표되었다[8–10,21]. 본 연구에서는 Motion blur에 의해 공간 해상도가 제한되는 DMM 이미지에 NBD 방법을 적용하여 Motion blur를 제거함으로써 해당 검출기의 pixel 크기보다 증가된 공간 해상도 증가 방법을 제안한다.
2.2 NBD
각종 blur 현상은 점 확산 함수(point spread function, PSF)라는 왜곡 연산자로 표현이 가능하다. 왜곡된 이미지 g(i,j)은 식 (1)과 같이 원 이미지 f(i,j)와 PSF 의 컨벌루션(convolution)으로 나타낼 수 있다.
이때, ∗는 2차원 컨벌루션을 의미하며, h(i,j)는 PSF함수를, n(i,j)는 잡음 함수를 나타낸다. i, j는 픽셀의 좌표를 나타내다.
이미지 복원의 목표는 g(i,j)로부터 원 이미지의 추정이미지
2.2.1 위너(Wiener) 필터
Wiener 필터는 g(i,j) 이미지에서
여기서 E[∙]는 인수의 기대치이다. 주파수 영역에서 식 (2)의 e2(i,j)를 최소값으로 만들어주는 식은 (3)과 같아진다.
여기서 H(u,v)는 PSF 함수의 푸리에 변환이며, G(u,v)는 왜곡된 이미지의 푸리에 변환이다. SnX(u,v)는 SNR의 역수(잡음의 파워 스펙트럼 / 원 이미지의 파워 스펙트럼)의 푸리에 변환이다. 그러나 SnX(u,v)을 구하기 위한 원 이미지의 파워 스펙트럼은 알기 쉽지 않기 때문에 SnX(u,v)은 잡음의 분산(σ2)을 이용한 상수 K = 2σ2로 근사화 된다. 만약 잡음이 없다면 잡음 파워 스펙트럼은 사라지고 Wiener 필터는 역필터와 같아진다[8,12].
2.2.2 리처드슨-루시(Richardson-Lucy) 알고리즘
RL 알고리즘은 Bayesian theory를 기반으로 최대 공산 추정(maximum likelihood estimate, MLE)을 사용하며 식 (4)은 다음과 같다.
여기서
2.2.3 Sparse Adaptive priors 알고리즘(SAP)
이 알고리즘은 ill-posed 문제의 regularization을 기반으로 Sparse Adaptive priors을 이용하며 식 (5)와 같다.
여기서 매트릭스 ds, s ∈ {1,.,5}는 각각 1차, 2차 미분 필터 연산자 dx, dy, dxx, dxy이다. λs는 양의 weights이며, ωs는 이미지 f에 대한 예상되는 필터 응답들이다(즉, ωs = dsf). 노이즈에 대해 특정한 임계값을 기준으로 |(dsf)i,j|이 임계값보다 작으면 ωs = 0으로, 임계값보다 크면 ωs = (dsf)i,j로 놓는다. 이를 통해 작은 미분값을 가지는 픽셀을 노이즈로 판단하여 제거하며, 반대의 경우 물체의 엣지로 판단하여 보존시킨다. 이러한 알고리즘 동작은 노이즈를 줄이며 디컨볼루션을 빠르게 실행할 수 있다. 또한 패딩을 통해 주파수 영역에서의 디컨볼루션으로 인한 링잉효과를 줄인다[21]. 알고리즘은 저자의 웹사이트에서 제공한 소프트웨어를 사용하였다.
3. 측정 결과
3.1 라인 팬텀 이미지
MTF는 공간주파수 성분에 대한 주파수 응답 특성을 나타내는 것으로, 공간정보를 기록하는 이미지 시스템의 성능을 나타낸다. MTF를 구하기 위해 라인 팬텀 이미지에서 lp/mm에 따라 검은색과 흰색 패턴의 밝기차(명도비)를 구해준다[15,16]. 획득한 이미지의 공간 해상도를 수치적으로 비교하기 위해 촬영된 Fig. 4의 라인 팬텀 이미지를 사용하여 MTF을 계산하여 비교하였다. MTF는 MatlabR2018b(Mathworks, Natick, Massachusetts, U.S.A.)을 사용하여 계산하였다. Fig. 5는 X-ray 튜브 전압 80 keV, 튜브 전류 2 uA에서 X-ray로 촬영한 라인 팬텀 이미지를 DMM과 NBD 알고리즘을 적용한 이미지이다. DMM을 통해 110 μm-pixel 이미지를 가지고 55 μm-pixel 이미지와 유사한 해상도를 가진 Fig. 5(c)를 얻을 수 있었지만, Motion blur가 생긴 흐릿한 이미지가 생성되었다. 이 Motion blur를 없애기 위해 NBD 알고리즘을 적용한 이미지가 Fig. 5(d), Fig. 5(e), Fig. 5(f)이다. Fig. 5(d)는 Wiener 필터를, Fig. 5(e)는 RL 알고리즘을 Fig. 5(f)는 SAP 알고리즘을 적용하였다.

Line phantom images for MTF
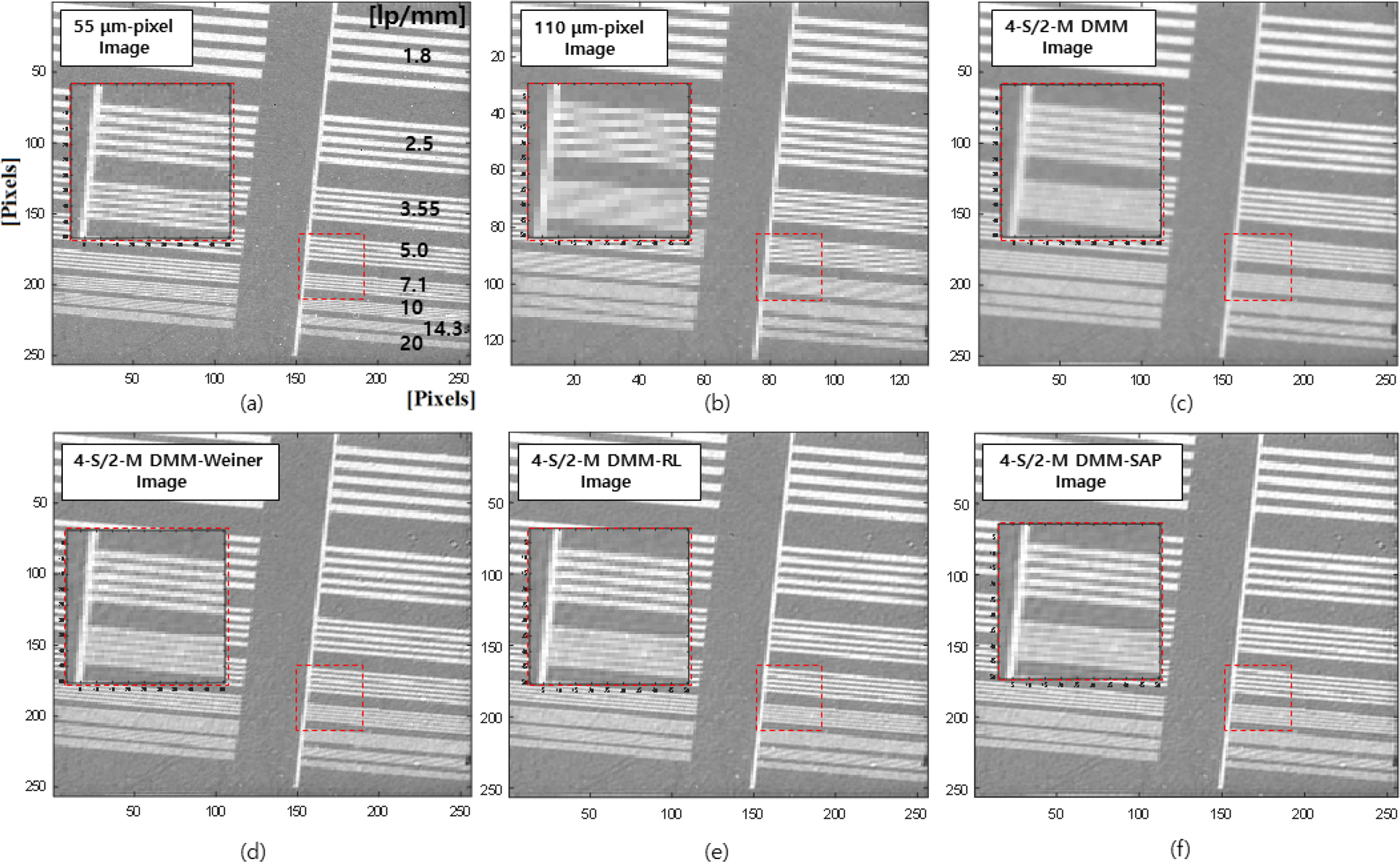
Line phantom x-ray images for cases. (a) 55 μm-pixel image (b) 110 μm-pixel image (c) 4-S/2-M DMM image (d) 4-S/2-M DMM-Wiener image (e) 4-S/2-M DMM-RL image(It = 9) (f) 4-S/2-M DMM-SAP image
Fig. 6은 55 μm-pixel 이미지, 110 μm-pixel 이미지와 4-S/2-M DMM 이미지, 4-S/2-M DMM-Wenier 이미지, 4-S/2-M DMM-RL 이미지, 4-S/2-M DMM-SAP 이미지의 MTF이다. 시스템의 대표 공간 해상도는 측정된 MTF 값이 0.1인 지점의 공간주파수 값(lp/mm)으로 정의된다[17]. Fig. 6을 통해 대표공간 해상도는 55 μm-pixel 이미지는 7.5 lp/mm, 110 μm-pixel 이미지는 4.35 lp/mm로 측정되었다. 4-S/2-M DMM 이미지는 6.44 lp/mm로 측정되었으며, 4-S/2-M DMM-Wiener 이미지는 6.76 lp/mm, 4-S/2-M DMM-RL이미지는 7.22 lp/mm로 측정되었다.

MTFs for cases; 55 μm-pixel image, 110 μm -pixel image, 4-S/2-M DMM image, 4-S/2-M DMM-Weiner image, 4-S/2-M DMM-RL image (It=9), 4-S/2-M DMM-Sparse Adaptive image
4-S/2-M DMM-Sparse Adaptive 이미지는 7.34 lp/mm로 측정되었다. 4-S/2-M DMM 이미지는 공간 해상도가 110 μm-pixel 이미지에 비해 약 33 %, 4-S/2-M DMM-Wiener 이미지는 약 36 %, 4-S/2-M DMM-RL 이미지는 약 60 %, 4-S/2-M DMM-SAP 이미지는 약 62 % 증가함을 확인 할 수 있었다.
3.2 실제 적용
3.2.1 주관적 평가
NBD의 효과를 증명하기 위해 실제 이미지에 적용하였다. 이미지는 Fig. 6에 나타나있다. 55 μm-pixel 이미지를 2 × 2 binning을 통해 110 μm-pixel로 만든 이미지가 Fig. 7(b) 이다. 55 μm-pixel 이미지에서는 보이던 핀셋의 간격이 Fig. 7(b) 이미지에서는 해상도의 감소로 인해 구별되지 않는다. Fig. 7(c)는 4-S/2-M DMM 이미지이다. DMM 통해 핀셋의 간격이 구분이 될 정도로 공간 해상도가 증가하였다. 하지만 Motion blur가 발생하여 55 μm-pixel 이미지에 비해 흐릿함이 발생하였다. Fig. 7(d)와 Fig. 7(e)는 각각 4-S/2-M DMM-Wiener 이미지와 4-S/2-M DMM-RL 이미지이다. Motion blur가 제거됨으로써 Fig. 7(c)에 비해 흐릿함이 사라졌다. 마지막으로 DMM-SAP 알고리즘을 적용한 Fig. 7(f)는 RL을 적용한 이미지 Fig. 7(e)보다 노이즈 및 링잉효과가 줄어듬을 확인할 수 있다.

Actual x-ray images for cases. (a) 55 μm-pixel image (b) 110 μm-pixel image (c) 4-S/2-M DMM image (d) 4-S/2-M DMM-Wiener image (e) 4-S/2-M DMM-RL image(It = 7) (f) 4-S/2-M DMM-SAP image
3.2.2 객관적 평가
객관적인 성능을 비교하기 위해 평가 지표인 PSNR 과 SSIM을 사용하였다[18,19].
PSNR은 최대신호대잡음비로 신호가 가질 수 있는 최대 전력에 대한 잡음의 전력을 나타내며, 화질 손실 정보를 평가할 때 사용된다. PSNR 식은 아래 식 (6)와 같다.
여기서 fmax는 원본 이미지의 pixel의 최대값이며 8 bit 이미지의 경우 255이다. MSE는 평균곱오차로써 식 (7)과 같이 표현된다.
여기서 m, n은 이미지의 가로, 세로 사이즈를 의미한다. f(i,j)는 원본 이미지이며, g(i,j)는 왜곡된 이미지이다. MSE는 두 이미지의 pixel 값들의 차이에 대한 측정값을 나타내며, PSNR의 식 (6)에 MSE가 작을수록 더 큰 PSNR을 가진다[18]. 보통 30 dB 이하면 원본에 비해 화질 수준이 떨어진다고 평가한다[20].
Table 1은 55 μm-pixel 이미지에 대한 각각의 PSNR 을 측정한 결과이다. 4-S/2-M DMM, 4-S/2-M DMM-Wiener, 4-S/2-M DMM-RL 이미지 모두 PSNR 값이 30 dB 이상으로 계산되었다. 이를 통해 DMM 및 필터를 통해 이미지의 손실이 줄어듦을 확인할 수 있다. 추가적으로 4-S/2-M DMM 이미지보다 Wiener 필터, RL 알고리즘, 그리고 SAP 알고리즘을 적용한 영상이 PSNR 값이 보다 증가된 것을 확인 할 수 있었다.

PSNR for images
SSIM은 왜곡에 대하여 원본 이미지에 대한 유사도를 측정하는 유사 지수를 나타내며 식 (8)과 같다.
여기서 μx, μy는 원본 이미지와 왜곡 이미지의 평균이며,
여기서 L은 이미지의 동적 영역(Dynamic range)을 의미하며 k1는 k2각각 0.01과 0.03의 값을 가지는 상수이다[19].
Table 2는 55 μm-pixel 이미지에 대한 각각의 SSIM 을 측정한 결과이다. 아래 결과들을 통해 110 μm-pixel 검출기로 55 μm-pixel의 해상도를 가진 이미지를 만들어 낼 수 있음을 알 수 있다.

SSIM for images
4. 결 론
본 연구에서는 DMM을 통해 생기는 모션 블러를 없애기 위해 논블라인드 디컨볼루션을 통해 공간 해상도를 높이는 연구를 진행하였다.
라인 팬텀이미지의 MTF를 비교하기 위해, CdTe 물질을 사용한 55 μm-pixel 스펙을 가지는 직접방식 검출기 UNO-XRI를 사용하였다. X-ray 튜브 전압 80 keV, 튜브 전류 2 μA에서 촬영한 이미지를 획득하여 사용하였다. X-ray 튜브와 촬영체 사이의 거리는 58 cm 이며 X-ray 튜브와 검출기 사이의 거리는 60 cm로 설정하여 촬영하였다. 촬영된 55 μm-pixel 이미지를 2 × 2 binning을 통해 110 μm-pixel 이미지로 만든 후, DMM 및 논블라인드 디컨볼루션을 적용하였다.
MTF가 0.1에서 측정된 대표 공간 해상도은 55 μm-pixel 이미지의 경우 7.5 lp/mm, 110 μm-pixel의 경우 4.35 lp/mm로 측정되었다. 4-S/2-M DMM 이미지는 6.44 lp/mm로 측정되었으며, 4-S/2-M DMM-Wiener 이미지는 6.76 lp/mm, 4-S/2-M DMM-RL 이미지는 7.22 lp/mm로 측정되었다. 4-S/2-M DMM-Sparse Adaptive 이미지는 7.34 lp/mm로 측정되었다. 블라인드디컨볼루션을 통해 110 μm-pixel 검출기로 55 μm-pixel 검출기의 공간 해상도를 얻을 수 있었다.
다음으로 실제 이미지를 적용하여 Wiener 필터, RL 알고리즘과 Sparse Adaptive 알고리즘의 성능을 확인하였다. 주관적 평가와 PSNR 및 SSIM을 통한 객관적 평가 모두 RL 알고리즘을 통해 모션 블러를 제거함으로써 55 μm-pixel 이미지와 더욱 유사한 이미지를 얻을 수 있음을 보여주었다.
제시된 방법을 통해 이미 구축된 검출기를 가지고 무기 분야 X-ray 비파괴 검사에서 해상도가 더욱 높은 이미지를 얻음으로써, 무기의 이상 여부를 찾아 안정성과 신뢰도를 높일 수 있을 것이다.