태양광/지자기 센서를 이용한 회전안정형 탄체의 자세 측정
Measuring the Attitude of a Spin-Stabilized Projectile Using Solar/Geomagnetic Sensors
Article information
Abstract
Unlike fin-stabilized projectiles, there has been some difficulty measuring the attitudes of spin-stabilized projectiles during the long-range flight due to their high spin rates. In this work, solar and geomagnetic sensors were used to measure the attitude of a spin-stabilized projectile. A method to calculate the attitude of the projectile from the signals of the sensors was introduced as well as the methods to process the signals of the sensors. To validate the methods, the attitude of a projectile was calculated with the sensor signals from the actual flight data.
1. 서 론
포구를 출발한 탄체는 탄착할 때까지 중력의 영향을 받아 포물선의 탄도 궤적을 그린다. 이 때 탄체가 공기 내에서 탄도 비행을 한다면, 탄체가 지닌 속도로 인해 탄체에 공기역학적 힘이 작용한다. 탄체의 자세와 비행 속도 및 방향, 바람의 영향 등에 따라 공기역학적 힘은 실시간으로 변화하며 이는 탄체의 탄도 궤 적 예측을 어렵게 하는 요소다.
탄체의 탄도 궤적은 탄체가 공기역학적 힘을 받을 때의 탄체의 자세의 영향을 받는다. 따라서 탄체의 탄도 궤적을 예측할 때에는 주로 탄체에 작용하는 힘과 모멘트를 계산하는 6 자유도 동역학 모델이 사용된다. 이 때 탄체에 작용하는 공기역학적 힘과 모멘트를 계산하기 위해 사용하는 공력계수는 풍동 시험, 전산유체역학 계산(CFD: Computation Fluid Dynamics), 반경험적(semi-empirical) 이론식 등을 이용해 획득한다. 이렇게 계산된 탄도 궤적은 실제 포로 탄체를 발사하여 획득한 탄도 궤적과 일치하지 않는 경우가 발생하는 데, 그 이유는 기 확보된 공력계수와 실제 발사된 탄체의 공력계수 사이에 오차가 존재할 수 있기 때문이다. 이러한 오차를 보정하기 위해 6 자유도 운동 방정식의 해를 실제 탄체의 탄도 궤적과 일치 시키는 작업이 수행되며, 이를 위해서는 실제 발사된 탄체의 탄도 궤적 뿐 아니라 탄체의 자세까지 확보되어야 한다.
날개안정형 탄체의 경우 탄체 내부에 관성 측정 장치(IMU: Inertial Measurement Unit)와 원격 측정 장치를 내장하여 가속도, 각속도 정보로부터 탄체의 탄도 궤적과 자세를 확보할 수 있다. 그러나 회전안정형 탄체의 경우 탄체의 고속 회전이 IMU 계측 값에 큰 영향을 주기 때문에[1] 다른 방법을 고안해야 한다. 회전하는 탄체의 자세를 계측하기 위한 방법으로 널리 알려진 방법은 지자기 센서를 이용하는 Magsonde 를 이용하는 방법[2]과 태양광 센서 신호를 이용하는 Solarsonde를 이용하는 방법[3]이 있으나, 각 방법은 탄체의 자세를 간접적으로 계측하는 방법으로 탄체의 방위각 및 고각을 직접적으로 확인할 수 없다는 한계가 있다. 한편, 최근 회전안정형 탄체의 유도조종을 위해 GPS 위성 신호 및 3축 자기 센서를 이용해 탄체의 자세를 추정하는 연구가 상당 수준 진행되었다[4]. 이 방법은 3축 자기 센서를 통해 탄체의 Roll 회전각을 계측 후 GPS 위성 신호로 추정한 탄체의 속도 벡터를 이용해 탄체의 자세를 추정하지만, 탄체의 비행 중 바람의 영향으로 자세 추정 값과 실제 탄체의 자세 간 차이가 발생한다.
회전안정형 탄체의 자세를 직접적으로 계측하기 위해 본 연구는 태양광 센서와 지자기 센서의 신호를 모두 이용하는 방법을 소개한다. 원격으로 송수신한 태양광 센서의 신호를 처리하는 방법과 지자기 센서의 신호를 처리하는 방법, 그리고 두 신호로부터 탄체의 자세를 계산하는 방법을 다룬다. 또한 실제 포 사격을 하여 태양광/지자기 센서를 이용한 탄체 자세 측정을 수행해보았다.
2. 태양광/지자기 센서 신호를 통한 자세 측정
태양광 센서와 지자기 센서를 통해 회전안정형 탄체의 자세를 측정하는 방법은 다음과 같다. 첫째로 태양의 위치 벡터(
2.1 태양광 센서 신호 처리
회전안정형 탄체의 자세를 측정하기 위해 탄체의 내부에는 두 개의 태양광 센서가 장착되며 탄체의 외부에 얇은 슬릿 형태의 구멍을 내어 센서가 태양광을 감지할 수 있도록 한다. 이 때 구멍은 탄체가 회전하는 도중 센서가 태양을 향하지 않을 때에는 신호가 거의 발생하지 않고 태양을 향할 때에는 산봉우리 형태의 신호가 나타나도록 설계한다. 탄체의 자세 벡터와 태양 위치 벡터가 수직일 경우 태양광 센서의 신호는 Fig. 1의 (a)와 같이 발생한다. 탄체가 고속으로 회전하고 있어 1번 태양광 센서의 산봉우리 신호와 2번 태양광 센서의 산봉우리 신호 발생 간격이 같게 나타나며, 태양광 센서가 회전축에 대해 대칭으로 부착되어 있다면 태양광 센서 간 신호 발생 간격(τ12)은 각 태양광 센서의 신호 발생 간격(τ)의 절반으로 나타난다.

Example of signals of solar sensors equipped in spin-stabilized projectiles
만약 탄체의 자세 벡터와 태양 위치 벡터가 수직이 아닐 경우 태양광 센서의 신호는 Fig. 1의 (b)와 같이 나타난다. 태양광 센서가 회전축에 대해 대칭으로 부착되어 있을 때, 각 센서 간 신호 발생 간격(τ12)이 각 태양광 센서의 신호 발생 간격(τ)의 절반이 아닌 특정 값을 가진다. 이 값은 탄체의 자세 벡터와 태양 위치 벡터 사이의 각도 σS에 따라 달라진다. 이러한 특성을 이용한다면 태양광 센서 신호의 특성비 λ를 다음과 같이 정의하여 탄체 자세 벡터와 태양 위치 벡터 사이의 각도 σS를 계산할 수 있다.
태양광 센서 신호의 특성비 λ와 각도 σS의 관계는 기하학적으로 다음과 같이 수학적으로 계산할 수 있다. Fig. 2와 같이 탄체 내부에 태양광 센서 2개가 내장되었다고 가정한다면, 1번, 2번 태양광 센서의 슬릿이 탄체 회전축과 이루는 각을 각각 γ1, γ2로 나타낼 수 있고 각 슬릿 중심 사이의 원주 거리(angular distance)를 β로 나타낼 수 있다. 이 때 x축을 탄체 회전축, z축을 1번 태양광 센서의 중심을 지나며 x축에 수직인 축, y축을 z, x축과 수직인 축으로 하여 탄체에 고정된 직각좌표계를 정의한다. 탄체 좌표계에서 1번, 2번 태양광 센서의 신호가 나타나기 위해서는 태양이 각각 다음 식으로 표현되는 평면에 있어야 한다.
A schematic of solar sensors equipped in spin-stabilized projectiles
탄체의 회전속도를 ω라 하면
의 관계가 성립하며 탄체 좌표계에서 태양 위치 벡터(
식 (5)의 t는 태양이 zx평면에 있을 때로부터 경과된 시간이다. 1번 태양광 센서의 신호가 나타났을 때의 시간을 t1이라 하면 식 (2)∼(5)을 이용하여 다음 식을 유도할 수 있다.
식 (1), (6), (7)을 이용하면 태양광 센서 신호의 특성비 λ와 각도 σS의 관계식을 다음과 같이 구할 수 있다.
위 관계식을 이용하여 태양광 센서 신호의 특성비 λ를 이용해 각도 σS를 측정할 수 있지만 실제로는 슬릿의 깊이와 크기, 기하학적 치수인 γ1, γ2, β 등의 불확실성 등으로 인한 측정 오차가 발생할 수 있다. 실제 포 발사 실험을 할 때에는 태양을 모사하는 조명과 탄체 간 각도를 변화시키면서 특성비를 계측하여, 태양광 센서 신호의 특성비 λ와 탄체 자세 벡터와 태양 위치 벡터 사이의 각도 σS 사이의 관계식을 구하였다.
2.2 지자기 센서 신호 처리
회전안정형 탄체의 자세를 측정하기 위해 탄체의 내부에 두 개의 축을 구성하도록 지자기 센서를 내장하였다. 두 센서는 각각 탄체의 회전축과 일치하도록, 탄체의 회전축과 수직을 이루도록 부착되었다. 이 때 탄이 회전하고 있으므로 탄체의 회전축과 수직인 지자기 센서는 사인파 모양의 신호를 나타낸다. 지구자 기장 벡터

A schematic of geomagnetic sensors equipped in spin-stabilized projectiles
이러한 방식으로 계산한 지구자기장 벡터와 탄체 자세 벡터 사이의 각도 σM은 다음과 같은 오차를 가진다. 첫째로 별도의 보정 단계를 거치지 않는다면 지자기 센서의 부착 위치 및 각도 틀어짐에 의한 센서 신호 값 오차를 가진다. 둘째로 지자기 센서가 내장된 탄체가 자성을 갖는 금속으로 만들어졌을 경우 탄체 가공 과정에서 유도 자기장과 영구 자기장을 탄체가 갖게 되어 지자기 센서 신호가 오차 값을 가진다. 셋째로 자성을 가진 탄체가 포에서 발사될 경우 발사 충격으로 인해 유도 자기장과 영구 자기장 값이 변화하여 지자기 센서 신호가 오차 값을 가진다.
이러한 문제를 해결하기 위해 포 발사 시험을 통해 획득한 지자기 센서 신호 값 보정을 다음과 같이 수행하였다. 첫째로 발사 시각, 위치에서의 지구 자기장 벡터의 크기를 계산한다. 지구 자기장 벡터는 미국의 NOAA(National Oceanic and Atmospheric Administration)에서 제공하는 세계 자기 모델(World Magnetic Model, WMM)을 이용하여 계산하였다. 둘째로 탄체의 회전축과 일치하는 지자기 센서의 신호 값 M0과 탄체의 회전축과 수직인 지자기 센서 신호의 사인파 크기 값 M90에서 탄체의 유도 자기장과 영구 자기장 성분 값 을 찾아낸다. 이 때 M90은 사인파의 크기 값으로, 계산 과정에서 사인파의 편향(bias)이 제거되므로 탄체의 영구 자기장 성분을 무시할 수 있다. 탄체 회전축 방향의 유도 자기장 성분을 I0, 영구 자기장 성분을 P0, 탄체 회전축과 수직인 방향의 유도 자기장 성분을 I90, 발사 시각, 위치에서의 지구 자기장 벡터의 크기를 M이라 하면 다음과 같은 식이 성립한다.
탄체의 탄도 비행 구간에서 지구 자기장 벡터의 변화가 무시할 만하다고 가정한다면, 식 (9)는 탄도 궤적 전 구간에서 성립한다. 탄도 궤적 전 구간 N개의 지자기 센서 신호 값에 대하여 식 (9)는 식 (10)과 같은 행렬식으로 나타낼 수 있으며, 식(10)을 이용해 영구 자기장 성분 P0값에 따른 유도 자기장 성분 I0, I90의 값을 식 (11)과 같이 역함수를 이용한 최소 자승법을 통해 계산할 수 있다.
그 후 식 (11)로 구한 유도 자기장 성분을 이용하여 지구 자기장 추정 오차 ∆M을 다음과 같이 정의한다.
식 (11), (12)를 이용하면 영구 자기장 성분 P0값을 변수로 하여 목적함수 ∆M을 최소화하는 최적화 문제를 풀어, 지구 자기장 벡터의 변화가 최소인 P0, I0, I90값이 계산된다. 최적화를 통해 구한 P0, I0, I90값을 이용해 지자기 센서의 부착 위치 또는 각도 틀어짐에 의한 센서 신호 값 오차와 탄체의 자성에 의한 오차를 보상할 수 있다.
기존 연구에서는 두 개의 지자기 센서를 각각 탄체의 회전축과 일정 서로 다른 특정 각도를 이루도록 부착하여 영점 교차(zero crossing) 지점의 간격을 이용하는 방법을 통해 지구자기장 벡터와 탄체 자세 벡터 사이의 각도 σM을 계산하였다[2,3,5]. 이 방법을 사용하기 위해서는 지자기 센서 신호의 영점 교차 지점으로부터 계산되는 특성비와 각도 σM의 관계식을 알고 있어야 한다. 따라서 지자기 센서를 사용하기 전에 관계식을 확인하는 별도의 과정을 거쳐야 하나, 본 연구에서 사용한 방법을 사용한다면 생략이 가능하다.
2.3 자세 측정
태양광 센서를 통해 계산한 태양 위치 벡터와 탄체 자세 벡터 사이의 각도 σS와, 지자기 센서를 통해 계산한 지구자기장 벡터와 탄체 자세 벡터 사이의 각도 σM을 이용해 탄체의 자세를 계산하기 위해서는 태양 위치 벡터

Coordinate systems used to calculate position of the sun
태양의 평균 근점 이각(mean anomaly) g는 다음과 같이 계산할 수 있다.
태양의 평균 황경, 평균 근점 이각을 이용하여 황경(ecliptic longitude) λS는 다음과 같이 계산한다.
둘째로 황도좌표계에서의 태양의 위치를 적도좌표계(equatorial coordinates)로 변환한다. 황도 경사(obliquity of the ecliptic) ε을 23.439°로 근사하여 태양의 적위(declination) δ는 다음과 같이 계산한다.
셋째로 식 (16)을 통해 계산한 적도좌표계에서의 태양의 적위를 이용하여, 지평좌표계(horizontal coordinates)에서 태양의 위치를 계산한다. 지평좌표계에서의 태양의 위치는 태양 방위각(solar azimuth angle) ϕs와 태양 고도각(solar elevation angle) αS로 나타낼 수 있으며 h를 시각(hour angle), Φ를 포 발사 위치의 위도로 정의할 시 각각 다음 식을 통해 계산할 수 있다.
마지막으로, 지평좌표계에서의 태양의 위치를 지역 NED 좌표계(local NED coordinates)로 변환한다. 직교좌표계로 나타낸 태양 위치 벡터는 다음 식으로 표현된다.
태양 위치 벡터

Attitude vectors of a spin-stabilized projectile calculated with the solar/geomagnetic sensors
식 (20)의 동차 해(homogeneous solution)
식 (20)의 비동차 해(non-homogeneous solution)
탄체 자세 벡터
식 (23)에서
한편, 탄체 자세 벡터
식 (24)에서 탄체의 yaw ψ는 북쪽을 0도로 하여 시계방향이 양의 값을 가지도록 계산된다.
3. 포 발사 실험을 통한 탄체 자세 측정
실제 포 발사를 수행하여 태양광 센서와 지자기 센서를 통해 탄체의 자세를 측정하는 실험을 수행하였다. 탄체에 탑재된 태양광/지자기 센서의 신호는 원격 송수신기를 통해 수신되었다. Fig. 6은 포 발사 시 수신된 태양광 센서 신호의 최고점의 크기를 나타낸 그림이다. 태양광 센서 신호의 최고점의 크기는 탄체의 자세가 태양 위치 벡터와 수직에 가까워질수록 큰 값을 나타내었다. 태양광 센서 신호의 최고점의 크기 값과 탄체 자세 간 특정 관계식이 성립할 것으로 보이나, 본 연구에서는 해당 내용을 다루지 않았다. Fig. 7은 별도의 태양광 센서 보정 절차를 통해 확보한 태양 위치 벡터와 탄체 자세 벡터 사이의 각도 σS와 태양광 센서 신호비 λ의 관계식을 도시한 것이다. σS의 값이 40도보다 작거나 140도보다 클 경우, 태양광 센서 신호의 크기가 작게 나타나 λ값의 계산이 제한될 수 있으나 실제 포 발사 실험 시 전 구간에서 λ값이 문제없이 계산되었다.
Magnitude of peak points of solar sensors
Relation between solar angle and solar sensor characteristic ratio
Fig. 8은 포 발사 시 수신된 지자기 센서의 신호를 나타낸다. 지자기 센서는 탄의 회전축과 일치하는 방향과(M0), 수직인 방향(M90)으로 1개 씩 탄체에 내장되었으며, 탄의 회전축과 수직인 지자기 센서의 신호는 사인파의 크기를 계산하기 위해 0.01초 간격으로 자료 처리를 수행하였다. Fig. 8의 지자기 센서 신호 값은 탄체가 지닌 자성의 영향 및 센서의 축 틀어짐 오차를 보정한 값이다.
Measured magnetic flux density of geomagnetic sensors
Fig. 9는 태양광 센서의 신호와 지자기 센서의 신호를 이용하여 계산한 σS 및 σM을 나타내며 전 구간에서 각 각도가 원활히 계측되었다. Fig. 10과 Fig. 11은 Fig. 9의 σS, σM값과 계산된

Calculated σS and σM from experiment

Calculated pitch angle from experiment
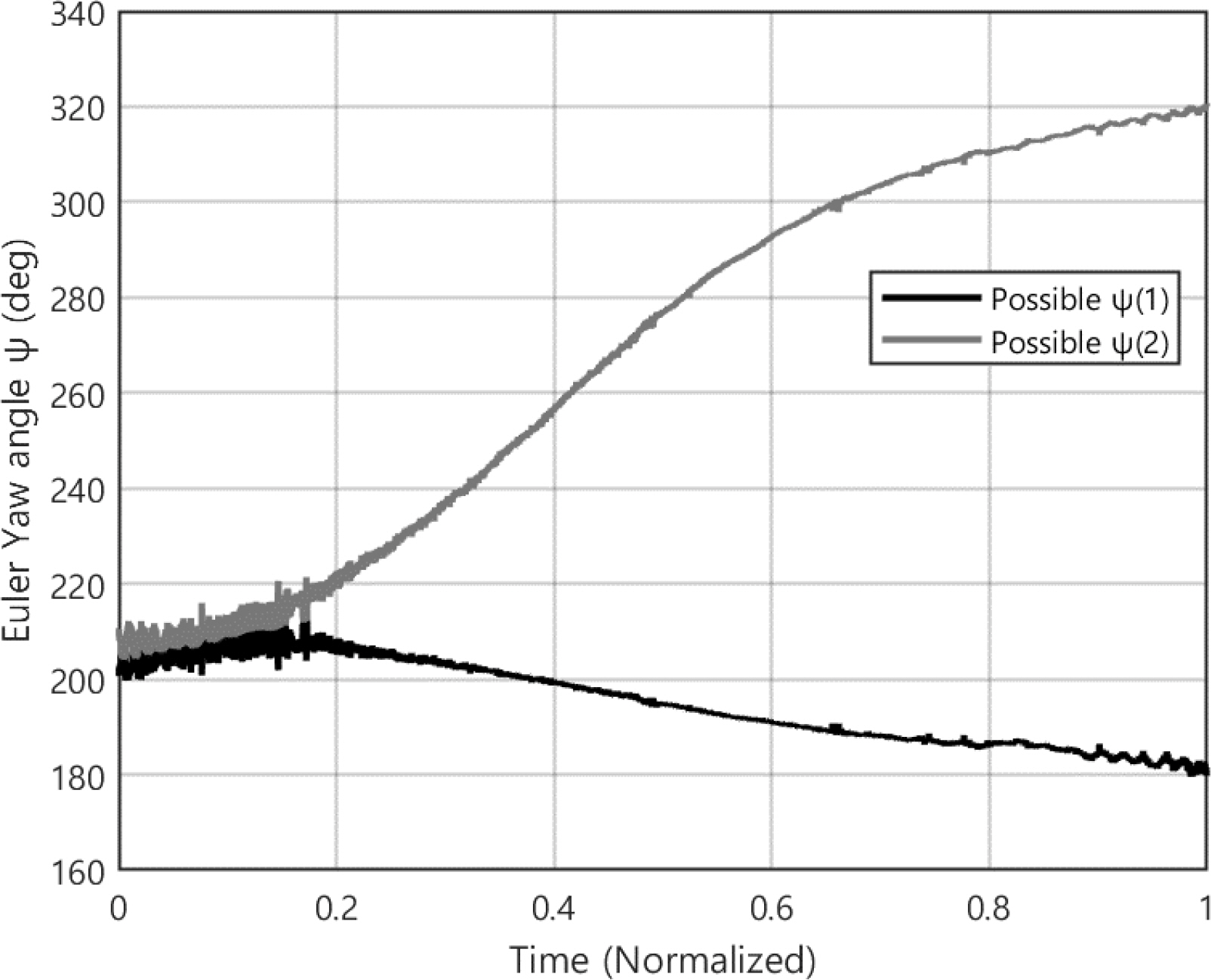
Calculated yaw angle from experiment
한편, 시간 0.2 이후의 대부분의 구간에서 탄체 자세 계측 값은 회전안정형 탄체의 특징적인 각운동 현상(Epicyclic motion, Swerve motion 등)이 잘 나타나 의미 있는 계측 값으로 보이며, 태양 위치 벡터
4. 결 론
회전안정형 탄체는 고속 회전을 통해 비행안정성을 가지는 특징이 있기 때문에 IMU를 이용한 자세 측정에 어려움이 있다. 본 논문에서는 탄체의 자세를 직접적으로 측정하기 위해 태양광 센서 및 지자기 센서를 이용하였으며 각 센서의 신호 처리 기법을 소개하였고, 태양 위치 벡터와 지구 자기장 벡터를 계산하여 탄체의 자세를 측정하였다. 실제 포 발사 시험을 통해 탄체의 방위각 및 고각 측정을 수행해 보았으며, 태양광 센서 신호와 지자기 센서 신호를 융합하여 기존 연구와는 달리 탄체의 자세가 직접적으로 측정됨을 확인하였다.