



ņä£ ļĪĀ
ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØĆ ļ¼┤ņāē, ļ¼┤ņĘ©ņØś ĒŖ╣ņä▒ņØä ņ¦Ćļŗī ļ¼╝ņ¦łņØ┤ ļ¦Ä ņ£╝ļ»ĆļĪ£ ĒŖ╣ņĀĢ ņ¦ĆņŚŁņŚÉ ņśżņŚ╝ņÜ┤ņØś ĒśĢĒā£ļĪ£ ņ¦æņżæ ņé┤ĒżļÉśņ¢┤ņ׳ļŹöļØ╝ļÅä ņØ┤ļź╝ ņŗ£Ļ░üņĀüņ£╝ļĪ£ ĒÖĢņØĖĒĢśĻĖ░ļŖö ņēĮņ¦Ć ņĢŖļŗż. ļö░ļØ╝ņä£ ņ¢ĖņĀ£ļōĀ Ēģīļ¤¼ļéś ļīĆļ¤ē ņé┤ņāüļ¼┤ĻĖ░(Weapon of Mass Destruction, WMD)ļĪ£ņØś ņØĆļ░ĆĒĢ£ ņé¼ņÜ®Ļ░ĆļŖźņä▒ņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż[1-3]. ļśÉĒĢ£, ļÅģņä▒ņé░ņŚģļ¼╝ņ¦ł(Toxic Industrial Chemicals, TIC)ņØĆ ņ£ĀņČ£ņé¼Ļ│Ā ļ░£ņāØ ņŗ£ ņ£ĀņČ£ņ¦ĆņŚŁņØś ņ×æņŚģņ×Éļ┐Éļ¦ī ņĢäļŗłļØ╝ ņØĖĻĘ╝ Ļ▒░ņŻ╝ļ»╝ņŚÉ ļīĆĒĢ┤ ĻĖēņä▒ ļ░Å ļ¦īņä▒ņĀüņØĖ Ēö╝ĒĢ┤ļź╝ ņżä ņłś ņ׳ļŗż[4]. ĒÖöĒĢÖņ×æņÜ®ņĀ£ ļ░Å ņé░ņŚģņ£ĀĒĢ┤ ĒÖöĒĢÖļ¼╝ņ¦łļĪ£ ņØĖĒĢ£ Ēö╝ĒĢ┤ļź╝ ņĄ£ņåīĒÖöĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö ĒÖöĒĢÖļ¼╝ņ¦łņØś ļģĖņČ£ ļ░Å ņśżņŚ╝ņŚ¼ļČĆļź╝ ņŗĀņåŹĒĢśĻ▓ī ĒāÉņ¦ĆĒĢśņŚ¼, ĻĘĖ Ēö╝ĒĢ┤ļź╝ ņĄ£ņåīĒÖö ĒĢśĻ│Ā, ņ¦ĆņåŹņĀüņ£╝ļĪ£ ļ¬©ļŗłĒä░ļ¦ü ĒĢśļŖö Ļ▓āņØ┤ ņżæņÜöĒĢśļŗż. ĒÖöĒĢÖļ¼╝ņ¦ł ņĪ┤ņ×¼ņŚ¼ļČĆņØś ĒÖĢņØĖņØĆ ļŗżņ¢æĒĢ£ ļ¼╝ņ¦łļ│ä ĒāÉņ¦Ć ņä╝ņä£ņØś ņä▒ļŖźĻ│╝ ĒĢ©Ļ╗ś ņä╝ņä£ļź╝ Ēāæņ×¼ĒĢśĻ│Ā ņÜ┤ņÜ®ĒĢśļŖö ĒāÉņ¦Ćņŗ£ņŖżĒģ£ņØ┤ Ēü░ ņśüĒ¢źņØä ļ»Ėņ╣£ļŗż.
ĒÖöĒĢÖĒāÉņ¦Ć ņä╝ņä£ņŚÉ ļīĆĒĢ£ ņŚ░ĻĄ¼ļŖö ļŗżņ¢æĒĢ£ ĻĖ░ņłĀ ļČäņĢ╝ņŚÉņä£ ĒÖ£ļ░£Ē׳ ņØ┤ļŻ©ņ¢┤ņĀĖ ņÖöļŗż. ĻĘĖļ¤¼ļéś ļīĆĻĖ░ ņżæņŚÉ ļģĖņČ£ļÉ£ ĒÖöĒĢÖļ¼╝ņ¦łņØĆ ĻĖ░ņ▓┤ ņāüĒā£ļĪ£ ņśżņŚ╝ņÜ┤ņØä ĒśĢņä▒ĒĢśņŚ¼ ĻĖ░ņāü ņĪ░Ļ▒┤ņŚÉ ļö░ļØ╝ ļŗżņ¢æĒĢ£ ļ░®Ē¢źņ£╝ļĪ£ ļ╣Āļź┤Ļ▓ī ĒÖĢņé░ĒĢśļ»ĆļĪ£ ņŗ£Ļ░üņĀüņØĖ ņŗØļ│ä ļśÉļŖö ņøÉĻ▒░ļ”¼ņŚÉņä£ņØś ņĀĢĒÖĢĒĢ£ ņ£äņ╣ś ĒīīņĢģņØĆ ļ¦żņÜ░ ņ¢┤ļĀĄļŗż. ļö░ļØ╝ņä£ ņśżņŚ╝ņ¦ĆņŚŁņØä ņŗĀņåŹĒĢśĻ▓ī ņČöņĀü ļśÉļŖö ĒāÉņ¦ĆĒĢśņŚ¼ ņśżņŚ╝ ņŚ¼ļČĆļź╝ ĒÖĢņØĖĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö ņä╝ņä£ĻĖ░ņłĀ ļ┐É ņĢäļŗłļØ╝ ņä╝ņä£ļź╝ Ēāæņ×¼ĒĢśņŚ¼ ļŗżņ¢æĒĢ£ ņāüĒÖ®ņŚÉņä£ ĒÖöĒĢÖņśżņŚ╝ ņĀĢļ│┤ņØś ĒÜŹļōØņØä Ļ░ĆļŖźĒĢśĻ▓ī ĒĢśļŖö ĒÖöĒĢÖĒāÉņ¦Ćņä╝ņä£ Ēāæņ×¼ Ēöīļ×½ĒÅ╝ ņŚ░ĻĄ¼ ņŚŁņŗ£ ņżæņÜöĒĢśļ®░ ļ░£ņĀäĒĢśļŖö ĒāÉņ¦Ćņä╝ņä£ ĻĖ░ņłĀĻ│╝ ĒĢ©Ļ╗ś ņĄ£ĻĘ╝ ļŗżņ¢æĒĢ£ ĒśĢĒā£ņØś ĒāÉņ¦ĆĻĖ░ ņÜ┤ņÜ®Ļ░£ļģÉ ņŚ░ĻĄ¼Ļ░Ć ņ¦äĒ¢ēļÉśĻ│Ā ņ׳ļŗż[5].
ĻĖ░ņĪ┤ņØś ĒāÉņ¦Ćļ░®ņŗØņØĆ ĒÖöĒĢÖĒāÉņ¦ĆĻĖ░ļź╝ Ē£┤ļīĆĒĢ£ ļ│æņé¼Ļ░Ć ņśżņŚ╝ņ¦ĆņŚŁņŚÉ ņ╣©Ēł¼ĒĢśņŚ¼ ĒāÉņ¦ĆņĀĢļ│┤ļź╝ ņłśņ¦æĒĢśļŖö ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦Ć ļ░®ņŗØņØ┤Ļ▒░ļéś Ļ│ĀņĀĢ ņÜ┤ņśü ļ░®ņŗØņØś ņøÉĻ▒░ļ”¼ ĒāÉņ¦Ć ļ░®ņŗØņØ┤ļŗż. ņØĖļĀźņØ┤ Ēł¼ņ×ģļÉśņ¢┤ ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦ĆĻĖ░ļĪ£ ĒāÉņ¦ĆĒĢśļŖö ņĀæņ┤ēņŗØ ĒāÉņ¦ĆņØś Ļ▓ĮņÜ░, ņ£äĒŚśļ¼╝ņ¦łņØś ļģĖņČ£ņŚÉ ņØśĒĢ£ ņØĖļ¬ģ ņåÉņŗż ņ£äĒŚśņØ┤ ļåÆĻ│Ā ĒāÉņ¦Ćļ▓öņ£äņÖĆ ļ®┤ņĀüņØ┤ ņ¦Ćļ®┤ 2ļ»ĖĒä░ ņØ┤ĒĢś ļ░Å ĻĄŁņåīļ®┤ņĀüņ£╝ļĪ£ ĻĄŁĒĢ£ļÉśļŖö ņĀ£ĒĢ£ņĀÉņØ┤ ņ׳ņ£╝ļ®░, ņøÉĻ▒░ļ”¼ ĒāÉņ¦ĆĻĖ░ņłĀļĪ£ļŖö ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØś ļ░£ņāØ ļ░®Ē¢ź ņĀĢļ│┤ļź╝ ĒÜŹļōØĒĢĀ ņłś ņ׳ņ¦Ćļ¦ī, ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØś ņ£äņ╣śņŚÉ ļö░ļźĖ ļåŹļÅä ĒÖĢņØĖ ļ░Å ĒÖöĒĢÖļ¼╝ņ¦ł ņŗØļ│äņŚÉ ĒĢ£Ļ│äĻ░Ć ņ׳ļŖö ļŗ©ņĀÉņØ┤ ņ׳ļŗż.
ĒĢ£ĒÄĖ, ņĀæņ┤ēņŗØ ĒāÉņ¦ĆņØś ļŗ©ņĀÉņØä ļ│┤ņÖäĒĢśļŖö ĒÖöĒĢÖĒāÉņ¦Ć ņןņ╣śļĪ£ņä£, ļ¼┤ņØĖĻĖ░(Unmanned Aerial Vehicle, UAV) Ēöīļ×½ĒÅ╝ņØä ĒÖ£ņÜ®ĒĢ£ ĒāÉņ¦Ćņןņ╣śņØś ņĀüņÜ®ņŚ░ĻĄ¼Ļ░Ć ĒÖ£ļ░£Ē׳ ņ¦äĒ¢ēļÉśĻ│Ā ņ׳ļŖöļŹ░[5,6], UAVņŚÉ ņØśĒĢ£ ĒÖöĒĢÖĒāÉņ¦Ćņןņ╣śļŖö ĻĖ░ļÅÖņä▒ņØä ņ”ØĻ░Ćņŗ£ĒéżĻ│Ā ĒāÉņ¦ĆņØś ņŗĀņåŹņä▒ņŚÉ ņØśĒĢśņŚ¼ ļ░£ņāØ Ļ░ĆļŖźĒĢ£ ņØĖļ¬ģĒö╝ĒĢ┤ļź╝ ņĄ£ņåīĒÖö ĒĢĀ ņłś ņ׳ļŖö ņןņĀÉņØä Ļ░¢ļŖöļŗż. ĒĢśņ¦Ćļ¦ī Ēśäņ×¼Ļ╣īņ¦Ć UAV Ēöīļ×½ĒÅ╝ņØś ļ╣äĒ¢ē ņŗ£ ļ░£ņāØļÉśļŖö ļ╣äĒ¢ēņ▓┤ ņŻ╝ņ£ä ĻĖ░ļźśņØś ņśüĒ¢źņØ┤ļéś, ņĢ╝ņÖĖ ļīĆĻĖ░ĒÖśĻ▓ĮņĪ░Ļ▒┤ņŚÉ ļö░ļźĖ ņä╝ņä£ņØś ĒāÉņ¦Ćņä▒ļŖź ļ│ĆĒÖöņŚÉ ļīĆĒĢ£ ņŚ░ĻĄ¼ļŖö ļ¦żņÜ░ ļČĆņĪ▒ĒĢ£ ņāüĒÖ®ņØ┤ļ®░, ņŗżĒŚśņŗżņŚÉņä£ņØś ņä╝ņä£ņŗżĒŚś Ļ▓░Ļ│╝ņÖĆļŖö ļŗ¼ļ”¼ ļīĆĻĖ░ ĒÖśĻ▓ĮņŚÉņä£ņØś Ļ░ĆņŖżĒāÉņ¦Ć ņŗżĒŚś ņŗ£ ņ×ÉņŚ░ ĒÖśĻ▓ĮņŚÉņä£ņØś ņŚ¼ļ¤¼ Ļ░Ćņ¦Ć ņÜöņØĖļōżņŚÉ ņØśĒĢśņŚ¼ ņä╝ņä£ ņŗĀĒśĖņŚÉ ļ¦ÄņØĆ Ļ░äņäŁĒÜ©Ļ│╝Ļ░Ć ļéśĒāĆļé£ļŗż[7].
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö, ņøÉĻ▒░ļ”¼ņŚÉņä£ ņāüņŗ£Ļ░Éņŗ£Ļ░Ć Ļ░ĆļŖźĒĢ£ ņĀüņÖĖņäĀ ņ┤łļČäĻ┤æļČäņäØ ļ░®ņŗØņØś ņøÉĻ▒░ļ”¼ ĒÖöĒĢÖĒāÉņ¦ĆĻĖ░ņÖĆ ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦ĆĻĖ░Ļ░Ć Ēāæņ×¼ļÉ£ ĒÖöĒĢÖĒāÉņ¦Ć UAVļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņśüņāüĒāÉņ¦ĆņŚÉ ņØśĒĢ£ ĒŖ╣ņĀĢņ¦ĆņŚŁņØś ĒÖöĒĢÖņśżņŚ╝ņÜ┤ ņĪ┤ņ×¼ņŚ¼ļČĆļź╝ ĒÖĢņØĖĒĢ£ Ēøä, ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦ĆĻĖ░ļź╝ Ēāæņ×¼ĒĢ£ UAVĻ░Ć ĒĢ┤ļŗ╣ņ¦ĆņŚŁņŚÉ Ēł¼ņ×ģļÉśņ¢┤ ĒāÉņ¦Ćņä╝ņä£ņŚÉ ņØśĒĢ┤ ņśżņŚ╝ļ¼╝ņ¦łņØä ĒÖĢņØĖĒĢśļŖö ĒÖöĒĢÖĒāÉņ¦Ć ļ│ĄĒĢ® ņÜ┤ņÜ®Ļ░£ļģÉņŚÉ ļīĆĒĢ£ ņŚ░ĻĄ¼ļź╝ ņ¦äĒ¢ēĒĢśņśĆļŗż. ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦Ćļ░®ņŗØĻ│╝ ņøÉĻ▒░ļ”¼ ĒÖöĒĢÖĒāÉņ¦Ćļ░®ņŗØņØś ņןņĀÉņØä ĒÖ£ņÜ®ĒĢ£ ļ│ĄĒĢ®ĒśĢ ņÜ┤ņÜ®Ļ░£ļģÉņ£╝ļĪ£ņŹ©ņØś ļ│Ė UAV ĒÖöĒĢÖĒāÉņ¦ĆĻĖ░ņłĀņØĆ Fig. 1ņŚÉņä£ ļ¼śņé¼ĒĢ£ ļ░öņÖĆ Ļ░ÖņØ┤ ĒÖöņāØļ░® ļ│┤Ļ│ĀĻ┤Ćļ”¼ ļ░Å ļ¬©ļŹĖļ¦ü S/WņØĖ ĒÖöņāØļ░® ĒåĄĒĢ®ļ¬©ļŹĖ(NBC-RAMS)Ļ│╝ ņŚ░ļÅÖĒĢśņŚ¼ ņÜ┤ņÜ®Ļ░ĆļŖźĒĢśļŗż. ņ”ē, ņé¼Ļ▒┤ļ░£ņāØ ņĀĢļ│┤Ļ░Ć ņĀæņłśļÉśļ®┤, ĒÖöņāØļ░® ņśżņŚ╝ĒÖĢņé░ ņāüĒÖ®ņØä ĒåĄĒĢ®ļ¬©ļŹĖļ¦üņ£╝ļĪ£ ņśłņĖĪĒĢ£ Ēøä, ņøÉĻ▒░ļ”¼ ĒÖöĒĢÖĒāÉņ¦Ć ļ░Å ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦Ć UAV ņÜ┤ņÜ®ņØä ĒåĄĒĢ┤ ņŗĀņåŹĒĢśĻ▓ī ņśżņŚ╝ņāüĒÖ®ņØä ĒÖĢņØĖĒĢśļŖö ļ░®ņŗØņ£╝ļĪ£ ņØĖļ¬ģ ļ░Å ļ¼╝ņ×É Ēö╝ĒĢ┤ļź╝ ņĄ£ņåīĒÖöĒĢśļŖö ņāüĒÖ®ņĪ░ņ╣ś ļ░®ņĢłņØ┤ļŗż.

ņøÉĻ▒░ļ”¼ ĒāÉņ¦ĆĻĖ░ņłĀ: IR ĻĖ░ļ░ś ĒāÉņ¦ĆĻĖ░
ļ╣äņĀæņ┤ēņŗØ ĒāÉņ¦ĆĻĖ░ņłĀņØĆ ņŻ╝ļĪ£ Ļ┤æĒĢÖĻĖ░ļ░ś ĻĖ░ņłĀņØ┤ ņĀüņÜ®ļÉś ļŖöļŹ░, ņĀüņÖĖņäĀ ļČäĻ┤æļ▓Ģ(Infrared spectroscopy)[8], ļĀłņØ┤ņĀĆ ĻĖ░ļ░ś ļČäĻ┤æļ▓Ģ(Laser Induced Breakdown Spectroscopy, LIBS) [9] ĻĘĖļ”¼Ļ│Ā ļØ╝ļ¦ī ļČäĻ┤æļ▓Ģ(raman spectroscopy) ļō▒ņØ┤ ņ׳ļŗż[10]. ņØ┤ ņżæņŚÉņä£ļÅä ņłś km ņØ┤ņāüņØś ņøÉĻ▒░ļ”¼ņŚÉņä£ļÅä ļåÆņØĆ ĒÖöĒĢÖņśżņŚ╝ņÜ┤ ĒāÉņ¦Ćņä▒ļŖźņØ┤ ĻĄ¼ĒśäļÉśļŖö ņĀüņÖĖņäĀ ļČäĻ┤æļ▓ĢĻĖ░ļ░ś ĒāÉņ¦ĆĻĖ░ņłĀņØĆ ļåÆņØĆ ņĀĢĒÖĢņä▒Ļ│╝ ņåīĒśĢĒÖö Ļ░ĆļŖźĒĢ£ ņןņĀÉņØ┤ ņ׳ņ£╝ļ®░, LWIR(Long-Wave IR) ĒīīņןņśüņŚŁņŚÉņä£ ĒÖöĒĢÖļ¼╝ņ¦łņØś ņŗØļ│äņØ┤ Ļ░ĆļŖźĒĢśļŗżļŖö ĒŖ╣ņä▒ņØä ĻĖ░ļ░śņ£╝ļĪ£ ĒÖöĒĢÖļ¼╝ņ¦ł ĒāÉņ¦ĆĻĖ░ņłĀļĪ£ Ļ░üĻ┤æļ░øĻ│Ā ņ׳ļŗż[11].
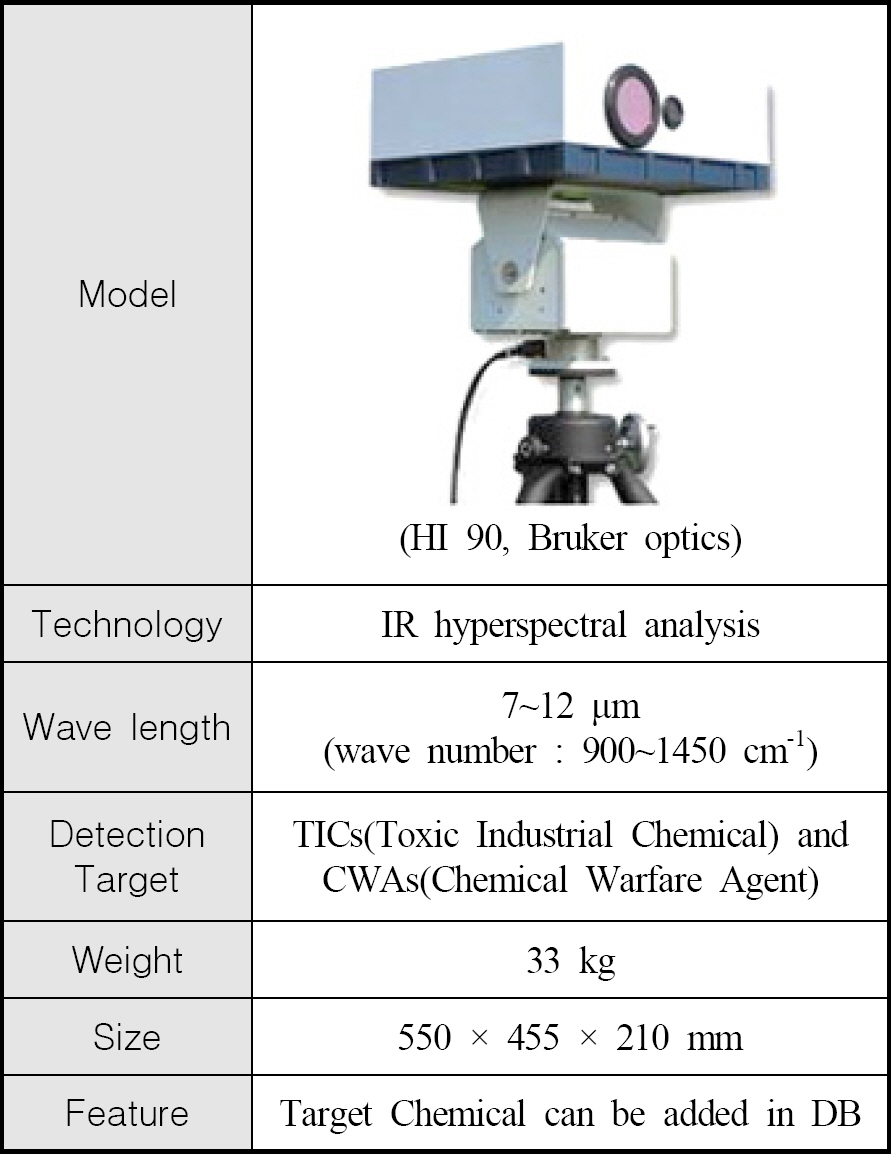
Table 1ņØĆ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņé¼ņÜ®ĒĢ£ ņĀüņÖĖņäĀ ņ┤łļČäĻ┤æļČäņäØ ņןņ╣ś HI 90(Bruker optics, ļÅģņØ╝)ņØ┤ļŗż. ĒĢ┤ļŗ╣ ĻĖ░ĻĖ░ļŖö ļ¦łņØ┤ņ╝łņŖ© Ļ░äņäŁĻ│äņÖĆ FPA(Focal Plan Array) ļ░®ņŗØņØś ņĀüņÖĖņäĀ ĒāÉņ¦ĆĻĖ░ļĪ£ LWIR ĒīīņןņśüņŚŁņŚÉ ĒĢ┤ļŗ╣ĒĢśļŖö Ēīīņן 7~12 ╬╝m ņŚÉņä£ ļ¼╝ņ¦łņØś Ļ│Āņ£Ā ĒØĪņłś ņŖżĒÄÖĒŖĖļ¤╝ņØä ļČäņäØĒĢśņŚ¼ Ļ░üņóģ TICņÖĆ ĒÖöĒĢÖņ×æņÜ®ņĀ£ļź╝ ĒāÉņ¦Ć ļ░Å ņŗØļ│äĒĢĀ ņłś ņ׳ļŗż[12,13]. ņŗ£ņĢ╝Ļ░ü ļé┤ņØś Ļ░ü ĒöĮņģĆņŚÉ ļīĆĒĢ┤ņä£ Ļ░üĻ░ü ĒØĪņłś ņŖżĒÄÖĒŖĖļ¤╝ņØä ļČäņäØĒĢśņŚ¼ ĒāÉņ¦ĆņŚ¼ļČĆļź╝ ņĢīļĀżņżĆļŗż. ņÜ┤ņÜ®ĒÖöļ®┤ņŚÉņä£ ĒÖöĒĢÖļ¼╝ņ¦łņØä ĒāÉņ¦ĆĒĢ£ ĒöĮņģĆņØĆ ļČēņØĆ ņĀÉņ£╝ļĪ£ Ēæ£ņŗ£ļÉ£ļŗż. ļ│Ė ņןņ╣śļŖö ņé╝Ļ░üļīĆļź╝ ņäżņ╣śĒĢśņŚ¼ ņ¦ĆņāüņŚÉ Ļ│ĀņĀĢņŗ£Ēéżļ®░ ņłś mņŚÉņä£ ņłś kmņØś Ļ▒░ļ”¼Ļ╣īņ¦Ć ĒāÉņ¦Ć Ļ░ĆļŖźĒĢśļŗż.
ņŗĀņåŹĒĢ£ ĻĖ░ļÅÖ ļ░Å ņØ┤ļÅÖĒśĢ ĒāÉņ¦Ćļź╝ ņ£äĒĢ┤ņä£ļŖö ņøÉĻ▒░ļ”¼ ĒÖöĒĢÖĒāÉņ¦ĆĻĖ░ļź╝ UAV ļō▒ņØś ļ¬©ļ░öņØ╝ Ēöīļ×½ĒÅ╝ņŚÉ ņĀüņÜ®ĒĢ┤ņĢ╝ ĒĢśļéś Ēü¼ĻĖ░, ļ¼┤Ļ▓ī ļ░Å ņåīļ╣äņĀäļĀźņŚÉ ņØśĒĢ£ ņĀ£ņĢĮņØ┤ ņ׳ņ¢┤, Ēśäņ×¼ ĻĖ░ņłĀļĪ£ļŖö ņ¦ĆņāüņŚÉņä£ Ļ│ĀņĀĢĒśĢ ļśÉļŖö ņ░©ļ¤ēĒśĢņ£╝ļĪ£ļ¦ī ņÜ┤ņÜ® Ļ░ĆļŖźĒĢśļŗżļŖö ņĀ£ĒĢ£ņé¼ĒĢŁņØ┤ ņ׳ļŗż. ņØ┤ļŖö ĒāÉņ¦ĆņĀĢļ│┤ņŚÉļÅä ņśüĒ¢źņØä ņŻ╝ļŖöļŹ░, Ļ│ĀņĀĢ ļ░Å ņ¦Ćņāü ņÜ┤ņÜ® ņŗ£ Ļ▒┤ļ¼╝ ļ░Å ņé░ņŚÉ ņØśĒĢ┤ ņŗ£ņĢ╝Ļ░Ć ņĀ£ĒĢ£ļÉśĻ│Ā, ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØś ļ░®Ē¢źņØĆ ĒīīņĢģĒĢĀ ņłś ņ׳ņ£╝ļéś Ļ▒░ļ”¼ļź╝ ņĖĪņĀĢĒĢśĻĖ░ ņ¢┤ļĀĄļŗż. ņøÉĻ▒░ļ”¼ ĒÖöĒĢÖĒāÉņ¦ĆĻĖ░ņØś ĒÖ£ņÜ®ņä▒ņØä ļåÆņØ┤Ļ│Ā ņØ┤ļÅÖĒĢśļŖö ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØä ņŗżņŗ£Ļ░äņ£╝ļĪ£ ņČöņĀüĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö UAVĒöīļ×½ĒÅ╝ņŚÉ ņĀüņÜ®ĒĢśĻĖ░ ņ£äĒĢ£ ņåīĒśĢĒÖö, ņåīļ╣äņĀäļĀź Ļ░Éņåī, Ļ┤æĒĢÖĻ│ä ņĢłņĀĢņä▒ņØä Ļ│ĀļĀżĒĢ£ ĻĖ░ĻĄ¼ ņäżĻ│ä ļō▒ ņČöĻ░ĆņĀüņØĖ ņŚ░ĻĄ¼Ļ░Ć ņÜöĻĄ¼ļÉ£ļŗż.
ņĀæņ┤ēņŗØ ĒāÉņ¦ĆĻĖ░ņłĀ
ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦ĆļŖö ļīĆĻĖ░ņżæņŚÉ ļČäĒżļÉ£ ĒÖöĒĢÖļ¼╝ņ¦łĻ│╝ ņä╝ņä£Ļ░Ć ņ¦üņĀæ ņĀæņ┤ēĒĢśņŚ¼ ĒāÉņ¦Ćļź╝ ņłśĒ¢ēĒĢśļŖö ļ░®ņŗØņ£╝ļĪ£, ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ĒāäņåīļéśļģĖĒŖ£ļĖī(Carbon Nano Tube, CNT) ĻĖ░ļ░śņØś ņāüņÜ® ņĀĢņĀäņÜ®ļ¤ē ļ│ĆĒÖö Ļ▓Ćņ¦ĆĒśĢ ņä╝ņä£(ĻĄŁļé┤ņĀ£ņ×æ)ļź╝ ņé¼ņÜ®ĒĢśņśĆļŗż. CNT(Carbon Nano-tube) ņä╝ņä£ļŖö ņåīĒśĢĒÖöĻ░Ć Ļ░ĆļŖźĒĢśĻ│Ā, ĒŖ╝ĒŖ╝ĒĢśĻ│Ā, ņĀäĻĖ░ņĀäļÅäļÅäĻ░Ć ņóŗņ£╝ļ®░ ļ»╝Ļ░ÉļÅäĻ░Ć ļåÆĻ│Ā ņØæļŗĄņŗ£Ļ░äņØ┤ ļ╣ĀļźĖ ņןņĀÉņØ┤ ņ׳ļŗż[14]. ņĀĢņĀäņÜ®ļ¤ē ļ│ĆĒÖö Ļ▓Ćņ¦ĆĒśĢ CNT ņä╝ņä£ļŖö ļæÉ ņĀäĻĘ╣ ņé¼ņØ┤ņŚÉ ņ▒äņøīņ¦ä ĒÖöĒĢÖņ▓śļ”¼ļÉ£ CNTņŚÉ ĒāÉņ¦ĆļīĆņāüļ¼╝ņ¦łņØ┤ ĒØĪņ░®ļÉĀ Ļ▓ĮņÜ░ ņĀäĻĖ░ņן ļ░Å ņĀĢņĀäņÜ®ļ¤ēņØś ļ│ĆĒÖöĻ░Ć ņāØĻĖ░ļŖö ņøÉļ”¼ņŚÉ ņ░®ņĢłĒĢ£ ņä╝ņä£ļĪ£, ļ▓żņĀĀ, ņĢäņäĖĒåż, DMMP(Dimethyl methylphosphonate)ļō▒ ļŗżņ¢æĒĢ£ TICļź╝ ĒāÉņ¦ĆĒĢĀ ņłś ņ׳ļŗż[15,16].
UAV Ēöīļ×½ĒÅ╝ņŚÉ ļīĆĒĢ£ ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦Ćņä╝ņä£ņØś ņĀüņÜ®ņØä Ļ│ĀļĀżĒĢĀ ļĢī ņä╝ņä£ņØś Ēü¼ĻĖ░, ļ¼┤Ļ▓ī, ņåīļ╣äņĀäļĀź, ņŗĀĒśĖņĀäņåĪ ĒåĄņŗĀĻ▒░ļ”¼, ņä▒ļŖź, ļ░Å Ļ░ĆĻ▓® ļō▒ ļŗżņ¢æĒĢ£ ĒŖ╣ņ¦ĢņØ┤ Ļ│ĀļĀżļÉśņ¢┤ņĢ╝ ĒĢśļŖöļŹ░, ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņé¼ņÜ®ĒĢ£ ĒÖöĒĢÖĒāÉņ¦Ćņä╝ņä£ļŖö 50├Ś30├Ś 12 mmņØś ņ×æņØĆ Ēü¼ĻĖ░ņÖĆ 20 gņØś Ļ░Ćļ▓╝ņÜ┤ ļ¼┤Ļ▓ī ļ░Å 40mAh ņØś ļ¦żņÜ░ ļé«ņØĆ ņåīļ╣äņĀäļĀźņ£╝ļĪ£ ņÜ┤ņÜ®ņØ┤ Ļ░ĆļŖźĒĢśļ»ĆļĪ£ UAV Ēöīļ×½ĒÅ╝ņŚÉ ļ¦żņÜ░ ņĀüĒĢ®ĒĢśļŗż. PPM ļŗ©ņ£ä ņłśņżĆņØś ļåŹļÅäĻ╣īņ¦ĆļÅä ļ╣ĀļźĖ ļ░śņØæņŗ£Ļ░äņ£╝ļĪ£ ĒāÉņ¦ĆĒĢĀ ņłś ņ׳ļŗżļŖö ņןņĀÉņØ┤ ņ׳ņ¦Ćļ¦ī, ņ×¼ĒāÉņ¦Ćļź╝ ņ£äĒĢ┤ņä£ļŖö ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØä ļ▓Śņ¢┤ļéś ļ©Ėļ¼┤ļź┤ļŖö ĒÜīļ│Ą(refresh)ĒÖśĻ▓ĮņØ┤ ĒĢäņÜöĒĢśĻ│Ā, Ļ│ĀļåŹļÅäņØś ļ¼╝ņ¦łņŚÉ ļģĖņČ£ļÉśĻ▒░ļéś ņ¦ĆņåŹņĀüņ£╝ļĪ£ ļģĖņČ£ļÉśņŚłņØä Ļ▓ĮņÜ░ ņä╝ņä£ņØś ļ»╝Ļ░ÉļÅäĻ░Ć ĒśäņĀĆĒĢśĻ▓ī ņżäņ¢┤ļōżņ¢┤ ĻĄÉņ▓┤ĒĢ┤ņŻ╝ņ¢┤ņĢ╝ ĒĢ£ļŗżļŖö ļŗ©ņĀÉņØ┤ ņ׳ļŗż.
ĻĖłņåŹņé░ĒÖöļ¼╝ ļ░Å CNT ĻĖ░ļ░śņØś ņĀĢņĀäņÜ®ļ¤ēļ│ĆĒÖö/ņĀĆĒĢŁļ│ĆĒÖö ņä╝ņä£ĻĖ░ņłĀņØĆ ļ¦ÄņØĆ ņŚ░ĻĄ¼Ļ░Ć ņ¦äĒ¢ē ņżæņØ┤ņ¦Ćļ¦ī Ēśä ĻĖ░ņłĀņłśņżĆņ£╝ļĪ£ļŖö, ļŗżņóģņØś ļ¼╝ņ¦ł ņżæ ĒŖ╣ņĀĢ ļ¼╝ņ¦łņØä ņäĀĒāØņĀüņ£╝ļĪ£ ļČäņäØĒĢśĻ▒░ļéś 1 ppm ļ»Ėļ¦ī ĻĘ╣ļ»Ėļ¤ēņØś ĻĖ░ņ▓┤ ĒāÉņ¦ĆĻ░Ć ņĀ£ĒĢ£ļÉśņ¢┤ ļ¼╝ņ¦ł ņäĀĒāØņä▒, Ļ░ÉļÅäļź╝ Ē¢źņāüņŗ£ĒéżĻĖ░ ņ£äĒĢ£ ņ¦ĆņåŹņĀü ļģĖļĀźņØ┤ ĒĢäņÜöĒĢ£ Ļ▓āņ£╝ļĪ£ ļ│┤ņØĖļŗż[17].
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņé¼ņÜ®ĒĢ£ CNT ĻĖ░ļ░ś ņĀæņ┤ēņŗØ ĒÖöĒĢÖņä╝ņä£ļŖö ņĄ£ņĀĆļåŹļÅä 1.98 ppmņØś DMMPņŚÉ ļīĆĒĢ┤ ĒāÉņ¦Ć Ļ░ĆļŖźĒĢśļ®░, ņ£Āņé¼ĒĢ£ ĻĄ¼ņĪ░ņØś ņŗĀĻ▓Įņ×æņÜ®ņĀ£ ņŚŁņŗ£ ĒāÉņ¦Ć Ļ░ĆļŖźĒĢśņ¦Ćļ¦ī ļŗ©ļÅģņÜ┤ņÜ® ņŗ£ Ļ░ü ĒÖöĒĢÖļ¼╝ņ¦łņØś ņŗØļ│äņØĆ ņĀ£ĒĢ£ļÉ£ļŗż. ĻĘĖļ¤¼ļéś ļŗżļźĖ ņåīņ×¼ņØś ņä╝ņä£ļź╝ Ēś╝ĒĢ®ņÜ┤ņÜ®ĒĢśĻ▒░ļéś, ņøÉĻ▒░ļ”¼ ņĀüņÖĖņäĀ ņ┤łļČäĻ┤æļČäņäØ ņןļ╣ä ļō▒ņ£╝ļĪ£ ņŗØļ│äņØä ļÅĢļŖö Ļ▓ĮņÜ░ ņäĀĒāØņä▒ ņĖĪļ®┤ņŚÉņä£ ļ│┤ņÖäĒĢĀ ņłś ņ׳ļŗż.
ņŗżĒŚś
ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦Ćņä╝ņä£ļź╝ Ēāæņ×¼ĒĢ£ UAVņÖĆ ņøÉĻ▒░ļ”¼ ĒÖöĒĢÖņśüņāüĒāÉņ¦Ć UAVņØś ļ│ĄĒĢ® ņÜ┤ņÜ®ņä▒ņØä ņŗ£ĒŚśĒĢśĻĖ░ ņ£äĒĢ┤ņä£ ĒŖ╣ņĀĢ ņ¦ĆņŚŁņŚÉ ņé┤ĒżļÉ£ ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņŚÉ ļīĆĒĢśņŚ¼ ļæÉ ņןļ╣äņŚÉņä£ ļÅÖņŗ£ņŚÉ ĒāÉņ¦ĆļÉśļŖöņ¦Ć ņŚ¼ļČĆļź╝ ĒÖĢņØĖĒĢśļŖö ņŗżĒŚśņØä ņłśĒ¢ēĒĢśņśĆļŗż. ļ│Ė ņŗżĒŚśņŚÉņä£ļŖö ņśżņŚ╝ņÜ┤ ņśüņāü ĒÖĢņØĖņØä ņ£äĒĢśņŚ¼ ņøÉĻ▒░ļ”¼ ĒÖöĒĢÖĒāÉņ¦ĆĻĖ░(ņĀüņÖĖņäĀ ņ┤łļČäĻ┤æļČäņäØ ņןņ╣ś, HI90)ļź╝ Ļ│ĀņĀĢļ░░ņ╣ś ĒĢśņśĆĻ│Ā, CNT ĻĖ░ļ░ś ņĀĢņĀäņÜ®ļ¤ēļ│ĆĒÖö ņä╝ņä£ļź╝ Table 2ņØś UAVņŚÉ Ēāæņ×¼ ļ░Å ņŗżņĀ£ ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņŚÉ ņĀæņ┤ēņŗ£Ēé┤ņ£╝ļĪ£ņä£ ņä╝ņä£ņØś ĒāÉņ¦ĆņŗĀĒśĖļź╝ ņłśņŗĀĒĢśņŚ¼ ļ│ĄĒĢ®ĒśĢ ĒÖöĒĢÖĒāÉņ¦Ć ņŗżĒŚśņØä ņ¦äĒ¢ēĒĢśņśĆļŗż. ņĀĢņĀäņÜ®ļ¤ēļ│ĆĒÖö ņä╝ņä£Ļ░Ć Ēāæņ×¼ļÉ£ ĒÖöĒĢÖĒāÉņ¦Ćļō£ļĪĀņØĆ ĻĄŁļ░®Ļ│╝ĒĢÖņŚ░ĻĄ¼ņåīņŚÉņä£ ņ×Éņ▓┤ ņĀ£ņ×æļÉśņŚłļŗż. ņä╝ņä£ļĪ£ļČĆĒä░ ņłśņŗĀļÉśļŖö ĒāÉņ¦ĆņŗĀĒśĖ ņ×ÉļŻīļŖö ĒāÉņ¦Ćļō£ļĪĀņŚÉņä£ ņłśņŗĀĒĢśņŚ¼ ĒåĄņŗĀļ¬©ļōłņØä ĒåĄĒĢśņŚ¼ ņ¦ĆņāüņĀ£ņ¢┤ņŗ£ņŖżĒģ£ņŚÉ ņåĪņŗĀļÉśĻ│Ā ņĀĆņןļÉśņŚłļŗż.
Table┬Ā2.
Specification of the UAV
| Type | Quadrotor (4 propellers) |
| Size | 360 ├Ś 360 ├Ś 270 mm |
| Weight | 1.8 kg |
| Diameter of prop | 120 mm |
| Flight Controller | Pixhawk 2.1 |
| Communication | Radio telemetry 433 Mhz / 915 Mhz |
| Flight time | 15 min |
4.1 ņŗżĒŚś ĻĄ¼ņä▒
ņ¦ĆĒæ£ļ®┤ņŚÉņä£ ĻĖ░ĒÖöļÉśļŖö ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØä ņøÉĻ▒░ļ”¼ ĒÖöĒĢÖĒāÉņ¦ĆĻĖ░ņÖĆ UAVņŚÉ Ēāæņ×¼ļÉ£ ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦Ć ņä╝ņä£ļź╝ ļÅÖņŗ£ņŚÉ ņÜ┤ņÜ®ĒĢśņŚ¼ ĒāÉņ¦ĆĒĢśļŖö ņŗ£ļéśļ”¼ņśżļź╝ ĻĄ¼ĒśäĒĢśĻĖ░ ņ£äĒĢśņŚ¼ Fig. 2(a)ņÖĆ Ļ░ÖņØ┤ ņŗżĒŚśņØä ĻĄ¼ņä▒ĒĢśņśĆļŗż.
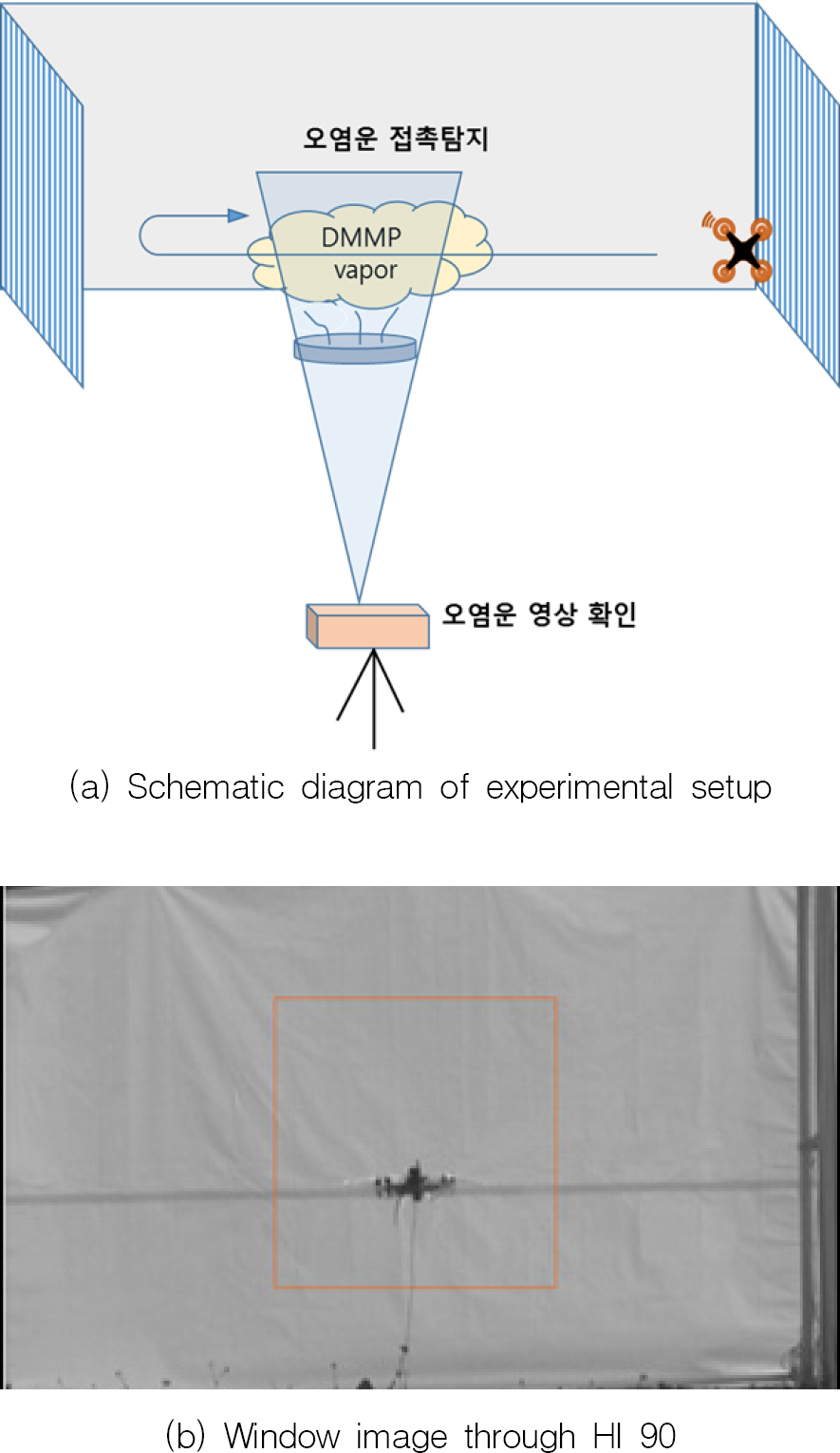
ĒāÉņ¦Ć ļīĆņāü ņśżņŚ╝ļ¼╝ņ¦łņØĆ ņŗĀĻ▓Įņ×æņÜ®ņĀ£ņØś ņ£Āņé¼ņ×æņÜ®ņĀ£ņØĖ DMMP(Sigma Aldrich, CAS 756-79-6)ļĪ£ņä£, ņĢĪņāü DMMP ļź╝ 200 ŌäāļĪ£ Ļ░ĆņŚ┤ļÉ£ ĒĢ½ĒöīļĀłņØ┤ĒŖĖņŚÉ ņŚÉņ¢┤ļĪ£ņĪĖ ņāüĒā£ļĪ£ ļČäņé¼ĒĢśņśĆļŗż. ņŚ┤ņŚÉ ņØśĒĢ┤ ĻĖ░ĒÖöļÉ£ DMMPļŖö ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØä ĒśĢņä▒ĒĢśņśĆļŖöļŹ░, ņØ┤ļĢī ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņŚÉ ļ»Ėņ╣śļŖö ļ░öļ×īņØś ņśüĒ¢źņØä ņĄ£ņåīĒÖöĒĢśĻĖ░ ņ£äĒĢ┤ Ļ░ĆļĪ£ ├Ś ņäĖļĪ£ ├Ś ļåÆņØ┤ ņĢĮ, 20 ├Ś 5 ├Ś 4 mņØś ļ░öļ×īļ¦ēņØ┤ ņ▓£ļ¦ēņØä ņäżņ╣śĒĢśņśĆļŗż. ņŗżĒŚśņŗ£ ĒÖśĻ▓ĮņØĆ ĻĖ░ņś© 32 Ōäā, ņāüļīĆņŖĄļÅä 73.5 %, ĒÆŹņåŹ 1.5 m/s ņØ┤ļŗż.
DMMP ļ░£ņāØņ¦ĆņĀÉņ£╝ļĪ£ļČĆĒä░ ņĢĮ 30 m ļ¢©ņ¢┤ņ¦ä Ļ││ņŚÉ ņĀüņÖĖņäĀ ņ┤łļČäĻ┤æļČäņäØņןņ╣śļź╝ ņ¦Ćļ®┤ņ£╝ļĪ£ļČĆĒä░ 1.2 m ļåÆņØ┤ņŚÉ ņäżņ╣śĒĢ£ Ēøä ņןņ╣śņØś ņŗ£ņĢ╝Ļ░ü ņĢłņŚÉ DMMP ļ░£ņāØņ¦ĆņĀÉņØ┤ ļōżņ¢┤ņśżļÅäļĪØ ņśüņāüĒÜŹļōØ ļ░®Ē¢źņØä ņĪ░ņĀĢĒĢśņśĆļŗż.
Fig. 2(b)ņŚÉņä£ ļ│╝ ņłś ņ׳ļō»ņØ┤ ņĀüņÖĖņäĀ ņ┤łļČäĻ┤æ ļČäņäØņןņ╣śļŖö DMMP ļ░£ņāØņ¦ĆņĀÉ ņ£ä ņ¦Ćļ®┤ņ£╝ļĪ£ļČĆĒä░ 1 m ~ 2 m, ļäłļ╣ä 1 m ĒÅŁņ£╝ļĪ£ ņŗ£ņĢ╝ļź╝ ĒÖĢļ│┤ĒĢśņśĆļŗż. ņĀĢņĀäņÜ®ļ¤ēļ│ĆĒÖö Ļ▓Ćņ¦ĆĒśĢ ņä╝ņä£ļŖö UAVņØś ņĖĪļ®┤ņŚÉ ļČĆņ░®ĒĢśņśĆļŗż. ļ¦ż ņŗżĒŚśņŚÉ ņĢ×ņä£ 2ļČäĻ░ä ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØ┤ ņŚåļŖö Ļ││ņŚÉņä£ ņä╝ņä£ņØś Ļ░ÆņØä ĒÖĢņØĖĒĢśļ®┤ņä£ ņĢłņĀĢĒÖöļź╝ ņ£äĒĢ┤ ļīĆĻĖ░ĒĢśņśĆļŗż. ņŗżĒŚśņŗ£ņ×æ Ēøä DMMPļź╝ ļ░£ņāØņŗ£ĒéżĻ│Ā ņĀüņÖĖņäĀ ņ┤łļČäĻ┤æļČäņäØ ņןņ╣śļĪ£ ĒÖĢņØĖĒĢśļ®┤ņä£ ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦Ć UAVļź╝ ĒÖöĒĢÖņśżņŚ╝ņÜ┤ ļ░®Ē¢źņ£╝ļĪ£ ņ▓£ņ▓£Ē׳ ņØ┤ļÅÖĒĢśņśĆļŗż. ņØ┤ļÅÖ ņżæ ņĀĢņĀäņÜ®ļ¤ēļ│ĆĒÖö Ļ▓Ćņ¦ĆĒśĢ ņä╝ņä£ņØś ĒāÉņ¦ĆņŗĀĒśĖ ļ░£ņāØ ņŗ£ ņ×Āņŗ£ ņĀ£ņ×Éļ”¼ņŚÉņä£ ņĀĢņ¦Ćļ╣äĒ¢ē(hovering mode)ņØä ĒĢśņśĆļŗżĻ░Ć ĒĢ┤ļŗ╣ņ¦ĆņŚŁņØä ļ▓Śņ¢┤ļéś ņä╝ņä£ļź╝ ĒÜīļ│Ąņŗ£ņ╝░ļŗż.
ņØ┤ Ļ│╝ņĀĢņØä 3ĒÜī ļ░śļ│ĄĒĢśņŚ¼ ņŗżĒŚśĒĢśņśĆĻ│Ā DMMP ļ░£ņāØņØĆ Ļ░üĻ░ü ņŗżĒŚś ņŗ£ņ×æ Ēøä 120ņ┤ł, 240ņ┤ł, 360ņ┤łņŚÉ ņØ┤ļŻ©ņ¢┤ņĪīļŗż.
4.2 ļ│ĄĒĢ®ĒśĢ ĒÖöĒĢÖĒāÉņ¦Ć ņÜ┤ņÜ®Ļ░£ļģÉņØś ņŗżĒŚśĻ▓░Ļ│╝
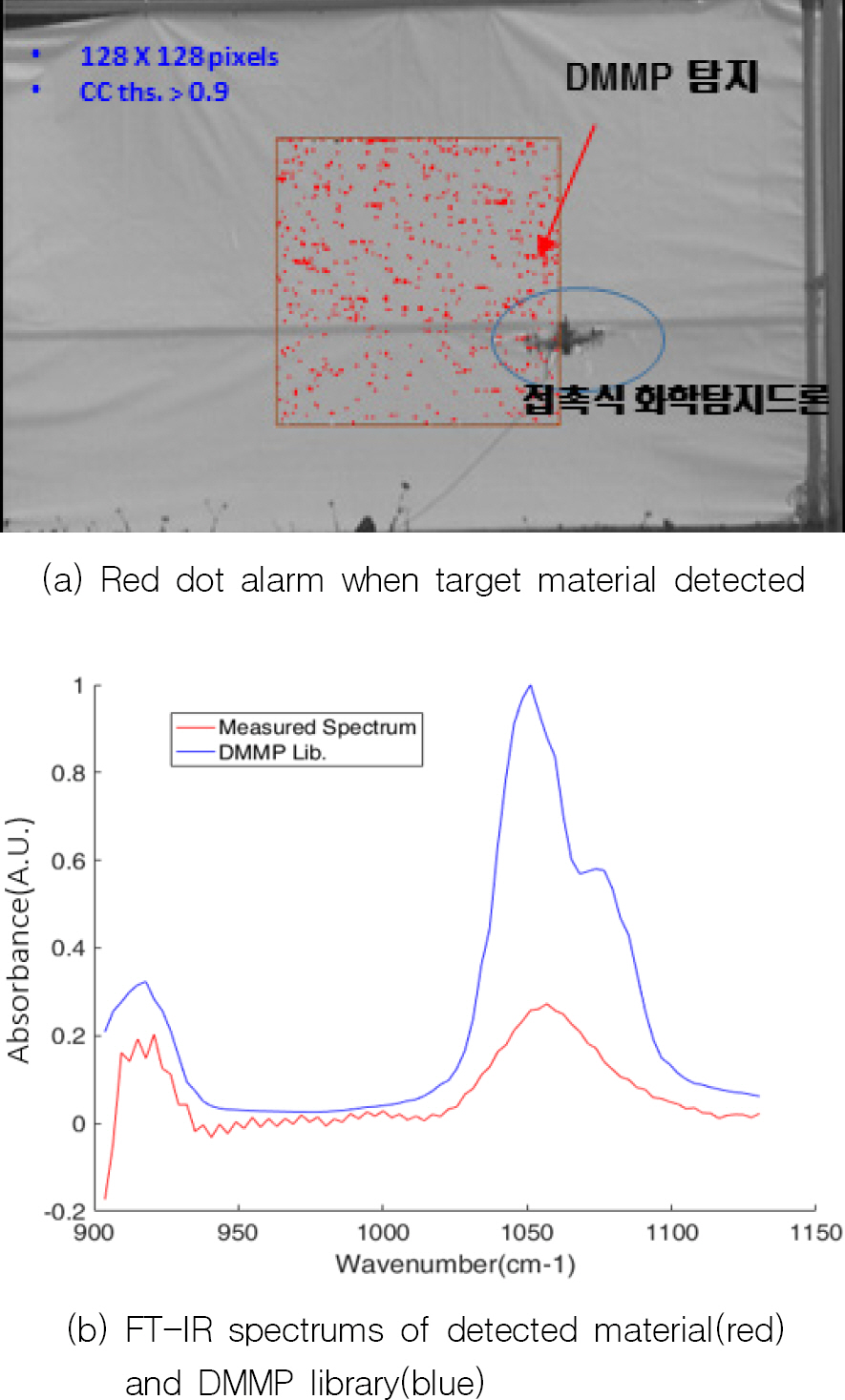
DMMP ĒÖöĒĢÖņśżņŚ╝ņÜ┤ ĒāÉņ¦Ćļź╝ ņ£äĒĢ£ ļ│ĄĒĢ®ĒśĢ ĒÖöĒĢÖĒāÉņ¦ĆņŗżĒŚś ņżæ ņĀüņÖĖņäĀ ņ┤łļČäĻ┤æļČäņäØ ņןņ╣ś(HI-90)ļĪ£ ĒÜŹļōØĒĢ£ ļŹ░ņØ┤Ēä░ļź╝ Fig. 3ņŚÉ ļéśĒāĆļé┤ņŚłļŗż. Fig. 3(a)ļŖö CCD ņśüņāüĻ│╝ Ļ░ü ĒöĮņģĆļŗ©ņ£äņØś ĒāÉņ¦ĆĻ▓░Ļ│╝ņØ┤ļŗż. ņśüņāü Ļ░ĆņÜ┤ļŹ░ņŚÉ ņé¼Ļ░üĒśĢņ£╝ļĪ£ Ēæ£ņŗ£ļÉ£ ņśüņŚŁņØ┤ ņŗ£ņĢ╝Ļ░üņØ┤ļŗż. ĒĢ┤ļŗ╣ ņśüņŚŁņŚÉ ļīĆĒĢ┤ņä£ ĒöĮņģĆļŗ©ņ£äļĪ£ ĒØĪņłś ņŖżĒÄÖĒŖĖļ¤╝ņØä ļČäņäØĒĢśņŚ¼ ņĀĆņןļÉ£ ļØ╝ņØ┤ļĖīļ¤¼ļ”¼ņÖĆ ļ╣äĻĄÉĒĢ£ļŗż. ņØ┤ļĢī ņĀĆņןļÉ£ ļØ╝ņØ┤ļĖīļ¤¼ļ”¼ ļŹ░ņØ┤Ēä░ņÖĆ ĒāÉņ¦ĆļÉ£ ĒØĪņłś ņŖżĒÄÖĒŖĖļ¤╝ņØä ļ╣äĻĄÉĒĢśļŖö ņĢīĻ│Āļ”¼ņ”śņØä ĒåĄĒĢśņŚ¼ ĒāÉņ¦ĆļÉ£ ļ¼╝ņ¦łņØä ņŗØļ│äĒĢśĻ│Ā, ĒāÉņ¦ĆĻ▓Įļ│┤ļź╝ ļ╣©Ļ░äņāē ņĀÉĻ│╝ Ļ▓Įļ│┤ņØīņØä ņØ┤ņÜ®ĒĢśņŚ¼ Ēæ£ņŗ£ĒĢ£ļŗż.
Fig. 3(b)ļŖö Ļ▓Įļ│┤Ļ░Ć ņÜĖļ”░ ĒöĮņģĆņŚÉņä£ ĒāÉņ¦ĆļÉ£ ĒÖöĒĢÖļ¼╝ņ¦łņØś FT-IR ņŖżĒÄÖĒŖĖļ¤╝(red)ņØä ļØ╝ņØ┤ļĖīļ¤¼ļ”¼(blue)ņÖĆ ļ╣äĻĄÉĒĢśņŚ¼ ļÅäņŗØĒÖö ĒĢśņśĆļŗż. ņØ┤ļĢī ņĖĪņĀĢ ņŖżĒÄÖĒŖĖļ¤╝ņØĆ ļØ╝ņØ┤ļĖīļ¤¼ļ”¼ņŚÉ ņ׳ļŖö DMMPņØś ņŖżĒÄÖĒŖĖļ¤╝Ļ│╝ ņÖäļ▓ĮĒ׳ ņØ╝ņ╣śĒĢśņ¦ĆļŖö ņĢŖņ¦Ćļ¦ī, ņØ┤ļŖö ĒÖĢņé░ļåŹļÅä, ņŖĄļÅä ļō▒ Library ņ×æņä▒ ņĪ░Ļ▒┤ņŚÉņä£ņØś ņĀ£ņ¢┤ļÉ£ ĒÖśĻ▓ĮņŚÉņä£ņØś ņŗżĒŚśņĪ░Ļ▒┤ņŚÉ ļ╣äĒĢśņŚ¼ ņĢ╝ņÖĖ ņĖĪņĀĢĒÖśĻ▓ĮņØ┤ ļŗżļźĖ Ļ▓░Ļ│╝ņŚÉ ĻĖ░ņØĖĒĢĀ ņłś ņ׳ļŗż. ĻĘĖļ¤¼ļéś ņĖĪņĀĢ ļ¬®ņĀüņ£╝ļĪ£ ĒĢśļŖö DMMPņŚÉ ļīĆĒĢ£ ĒāÉņ¦ĆĻ▓░Ļ│╝ļĪ£ņä£ ņŻ╝Ēīīņłś 920 cm-1ņÖĆ 1050 cm-1 ļČĆĻĘ╝ņŚÉņä£ ņŻ╝ Ēö╝Ēü¼Ļ░Ć ņĀĢĒÖĢĒ׳ ĒāÉņ¦ĆļÉ£ Ļ▓āņØĆ ĒāÉņ¦Ćņןļ╣äņØś LibraryņÖĆ ņŗżņĀ£ ņŗżĒŚśĻ▓░Ļ│╝ļź╝ ļ╣äĻĄÉĒĢśņŚ¼ ĒŖ╣ņĀĢĻ░ĆņŖż ņĪ┤ņ×¼ņŚ¼ļČĆļź╝ ĒīÉļŗ©ĒĢśĻĖ░ņŚÉ ņČ®ļČäĒĢ£ Ļ▓░Ļ│╝ļØ╝Ļ│Ā ĒīÉļŗ©ļÉśļŖöļŹ░, ņŗżņĀ£ ĒÖöņāØļ░® ņāüĒÖ®ņŚÉņä£ļŖö Ļ░ĆņŖżĒāÉņ¦Ć ņāüĒÖ® ņŗ£, ĒāÉņ¦ĆļīĆņāüņØä ņłś ņóģņØś ĒÖöĒĢÖļ¼╝ņ¦łļĪ£ ņČöņĀĢ ļ░Å ĒÖĢņØĖĒĢśĻĖ░ ļĢīļ¼ĖņØ┤ļŗż. ņäØņ£ĀĒÖöĒĢ®ļ¼╝Ļ│╝ Ļ░ÖņØĆ Ē£śļ░£ņä▒ ņ£ĀĻĖ░ļ¼╝ņØ┤ ļ░░Ļ▓Į ļ¼╝ņ¦łļĪ£ņŹ© IR ĒāÉņ¦ĆĻ▓░Ļ│╝ņŚÉ ņśüĒ¢źņØä ļ»Ėņ╣Ā ņłś ņ׳ņ£╝ļ®░ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ ņĀæņ┤ēņŗØ ņä╝ņä£ņŚÉļÅä ņśüĒ¢źņØä ļ»Ėņ╣£ļŗż. ĒŖ╣ņĀĢ ĒÖöĒĢÖņ×æņÜ®ņĀ£ņŚÉ ņäĀĒāØņä▒ņØä Ļ░¢ļŖö ļŗżņ¢æĒĢ£ ņåīņ×¼ņØś ņĀæņ┤ēņŗØ ĒÖöĒĢÖņä╝ņä£ļź╝ ņ¦æĒĢ®ņĀüņ£╝ļĪ£ ĻĄ¼ņä▒ĒĢśļŖö ļ░░ņŚ┤ĒśĢ ĒāÉņ¦Ćņä╝ņä£ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņŗØļ│äļŖźļĀźņØä ļåÆņØ┤ļŖö ņŚ░ĻĄ¼Ļ░Ć ņ¦äĒ¢ēļÉśĻ│Ā ņ׳ņ£╝ļ®░[18], ļÅÖņŗ£ņŚÉ ņāØņä▒ļÉśļŖö ļŗżņ¢æĒĢ£ ĒāÉņ¦ĆņŗĀĒśĖļź╝ ĒĢäĒä░ļ¦üĒĢśĻ│Ā ņŗĀĒśĖņ▓śļ”¼ ĒĢśņŚ¼ ļ░░Ļ▓Įļ¼╝ņ¦łņØś ņśüĒ¢źņØä ļ░░ņĀ£ĒĢśĻ│Ā ĒŖ╣ņĀĢĻ░ĆņŖżļź╝ ņŗØļ│äĒĢ┤ ļé┤ļŖö ĒāÉņ¦ĆņŗĀĒśĖ ņĢīĻ│Āļ”¼ņ”ś ņŚ░ĻĄ¼ļÅä ĒÖ£ļ░£Ē׳ ņ¦äĒ¢ēļÉśĻ│Ā ņ׳ļŗż[19]. ļö░ļØ╝ņä£ ļ│Ė ļģ╝ļ¼ĖņØś ņÜ┤ņÜ®Ļ░£ļģÉņŚÉņä£ IR ņśüņāüĒāÉņ¦ĆņŚÉ ņØśĒĢ┤ ņśżņŚ╝ņÜ┤ ņĪ┤ņ×¼ļź╝ ĒÖĢņØĖ ĒĢĀ ņŗ£ LibaryļĪ£ļČĆĒä░ ņ”ēņŗ£ Ļ░ĆņŖżņóģļźśļź╝ ņŗØļ│äĒĢśņ¦Ć ļ¬╗ĒĢśļŹöļØ╝ļÅä ņØ┤ņ¢┤ ļÆżļö░ļź┤ļŖö ņĀæņ┤ēņŗØ ĒāÉņ¦Ćļō£ļĪĀņŚÉ ņØśĒĢ£ 2ņ░© Ļ░ĆņŖżĒāÉņ¦Ć ļ░Å ņŗØļ│äĻ▓░Ļ│╝ļź╝ ĻĖ░ļīĆĒĢĀ ņłś ņ׳ļŗż.
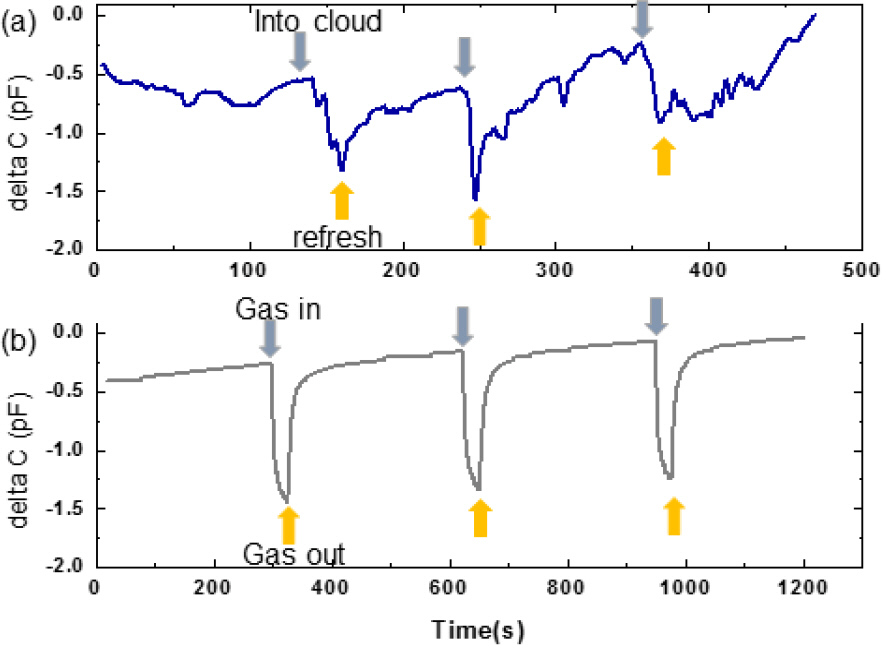
ĒÖöĒĢÖĒāÉņ¦Ć UAVņØś ņĀĢņĀäņÜ®ļ¤ēļ│ĆĒÖö Ļ▓Ćņ¦ĆĒśĢ ņä╝ņä£ļź╝ ĒåĄĒĢśņŚ¼ ĒÜŹļōØĒĢ£ ļŹ░ņØ┤Ēä░ļź╝ Fig. 4ņŚÉ ņ▒öļ▓äņŚÉņä£ ņŗżĒŚśĒĢ£ ņ░ĖĻ│Ā ļŹ░ņØ┤Ēä░ņÖĆ ĒĢ©Ļ╗ś ļéśĒāĆļé┤ņŚłļŗż. ĻĘĖļלĒöäņØś yņČĢņØĆ ņŗ£Ļ░äņŚÉ ļö░ļźĖ ņĀĢņĀäņÜ®ļ¤ē ļ│ĆĒÖöļ¤ē(delta C, pF)ņØä ņØśļ»ĖĒĢ£ļŗż. ņŗżĒŚśņŚÉņä£ ņé¼ņÜ®ĒĢ£ ņä╝ņä£ļŖö DMMP ņĀæņ┤ēņŗ£ ņĀĢņĀäņÜ®ļ¤ēņØ┤ Ļ░ÉņåīĒĢśļŖö ĒŖ╣ņä▒ņØ┤ ņ׳ņ¢┤, ņĢäļלļĪ£ Ē¢źĒĢśļŖö Ēö╝Ēü¼Ļ░Ć ņ׳ņØä ļĢī, ĒāÉņ¦ĆļīĆņāüļ¼╝ņ¦łņØ┤ ņ׳ļŗżĻ│Ā ĒīÉļŗ©ĒĢ£ļŗż. Fig. 4ņØś (a) ĻĘĖļ”╝ņŚÉņä£ ĒÜīņāē ņĢäļ×½ļ░®Ē¢ź ĒÖöņé┤Ēæ£Ļ░Ć ļéśĒāĆļé┤ļŖö ņ¦ĆņĀÉņØĆ DMMP ļ░£ņāØņŗ£ņĀÉņ£╝ļĪ£ Ļ░üĻ░ü 120ņ┤ł, 240ņ┤ł, 360ņ┤ł ņØ┤ļŗż. ĻĘĖļלĒöäņŚÉņä£ ĒÜīņāē ĒÖöņé┤Ēæ£ ņŗ£ņĀÉņØä ņ¦Ćļéśļ®┤ ņä╝ņä£Ļ░Ć ņ”ēņŗ£ ļ░śņØæĒĢśĻĖ░ ņŗ£ņ×æĒĢśņŚ¼ ņĀĢņĀäņÜ®ļ¤ē Ļ░ÆņØ┤ ļ¢©ņ¢┤ņ¦ĆļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. ĻĘĖļ”¼Ļ│Ā ļģĖļ×Ćņāē ĒÖöņé┤Ēæ£ ņ¦ĆņĀÉņØĆ ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØ┤ ņŚåļŖö Ļ││ņ£╝ļĪ£ ņØ┤ļÅÖĒĢśĻĖ░ ņŗ£ņ×æĒĢ£ ņŗ£ņĀÉņ£╝ļĪ£, ļģĖļ×Ć ĒÖöņé┤Ēæ£ ņØ┤Ēøä ņĀĢņĀäņÜ®ļ¤ēĻ░ÆņØ┤ ļŗżņŗ£ ĒÜīļ│ĄļÉśļŖö Ļ▓āņØä ņĢī ņłś ņ׳ļŗż. Fig. 4ņØś (b)ņŚÉ ļéśĒāĆļéĖ ņ▒öļ▓ä ņŗżĒŚś ļŹ░ņØ┤Ēä░ļŖö ņŗżĒŚśņŗżņÜ® ņåīĒśĢ ņ▒öļ▓äņŚÉ ņä╝ņä£ļź╝ ļåōĻ│Ā, ņĢĮ 2 ppmņØś DMMP Ļ░ĆņŖżļź╝ ņŻ╝ņ×ģĒĢśņŚ¼ ņĖĪņĀĢĒĢ£ Ļ▓░Ļ│╝ņØ┤ļŗż. ņ▒öļ▓äņØś ĒÖśĻ▓ĮņØĆ ĻĖ░ņś© 25.5 Ōäā, ņāüļīĆņŖĄļÅä 26.8 %ļĪ£ ņØ╝ļ░śņĀüņØĖ ņŗżļé┤ņØś ņāüņś©ņØ┤ļŗż. ņĢ╝ņÖĖņŗżĒŚśņØä ņ¦äĒ¢ēĒ¢łņØä ļĢīņØś ĒÖśĻ▓ĮĻ│╝ļŖö ĻĖ░ņś©, ņāüļīĆņŖĄļÅäņØś ņ░©ņØ┤Ļ░Ć ņ¦Ćļ¦ī, ņ▒öļ▓ä ņŗżĒŚś ļŹ░ņØ┤Ēä░ņÖĆ ņĢ╝ņÖĖ ņŗżĒŚś ļŹ░ņØ┤Ēä░ļź╝ ļ╣äĻĄÉĒĢśļ®┤, DMMP ņĀæņ┤ē ņŗ£ ĒĢśļØĮĒ¢łļŗżĻ░Ć ĒÖöĒĢÖņśżņŚ╝ ņÜ┤ņ£╝ļĪ£ ļČĆĒä░ ļ▓Śņ¢┤ļéśļ®┤ņä£ ļŗżņŗ£ ĒÜīļ│ĄĒĢśļŖö ĒśĢĒā£Ļ░Ć ņ£Āņé¼ĒĢ£ Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. ĻĘĖļ¤¼ļéś Fig. 4ņØś (a)ņØś ņĢ╝ņÖĖ ņŗżĒŚś Ļ▓░Ļ│╝ņØś Ļ▓ĮņÜ░ ņĖĪņĀĢ Ēö╝Ēü¼ņØś ņÜöļÅÖņØ┤ ņ▒öļ▓ä ņŗżĒŚś Ļ▓░Ļ│╝ņÖĆļŖö ļŗ¼ļ”¼ ņāüļŗ╣ĒĢ£ ņÜöļÅÖņØ┤ ņ׳Ļ│Ā ĒÜīļ│Ąņŗ£Ļ░äļÅä ļŗżņåī ņ¦ĆņŚ░ļÉśļŖö ĒśäņāüņØä ļ│┤ņØ┤Ļ│Ā ņ׳ļŗż. ņä╝ņä£ ņŗĀĒśĖņØś ņÜöļÅÖņØĆ UAVĻ░Ć ļ╣äĒ¢ēĒĢśļ®░ ļ░£ņāØĒĢśļŖö ņ£ĀļÅÖņן ĻĖēļ│ĆņŚÉ ļö░ļØ╝ ņä╝ņä£ņŚÉ ņĀæņ┤ēĒĢśļŖö ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØś ļåŹļÅäĻ░Ć ĻĘĀņØ╝ĒĢśņ¦Ć ņĢŖĻ│Ā ļ░Å ĒÆŹņåŹņŚÉ ņØśĒĢśņŚ¼ ņä╝ņä£ Ļ░ÉļÅäĻ░Ć ņśüĒ¢źņØä ļ░øļŖö Ļ▓āņ£╝ļĪ£ ļ│┤ņØ┤ļ®░, ĒÖöĒĢÖņśżņŚ╝ņÜ┤ ņżæņŗ¼ņØä ļ▓Śņ¢┤ļé¼ņØä Ļ▓ĮņÜ░ ņä╝ņä£ ĒÜīļ│Ą ņŗ£Ļ░äņØ┤ ņ▒öļ▓ä ņŗżĒŚśņØś Ļ▓ĮņÜ░ļ│┤ļŗż ĻĖĖņ¢┤ņ¦ĆļŖö Ļ▓āņØĆ, ņ▒öļ▓ä ņŗżĒŚśņØś Ļ▓ĮņÜ░ ņä╝ņä£Ļ░Ć ņśżņŚ╝ ĒÖśĻ▓ĮņŚÉ ļģĖņČ£ļÉ£ Ēøä ļ╣äņśżņŚ╝ ĒÖśĻ▓Įņ£╝ļĪ£ ņĀäĒÖśļÉśņ¢┤ ņä╝ņä£ņØś ņä▒ļŖźĒÜīļ│ĄņØ┤ ņŗĀņåŹĒĢśĻ▓ī ņØ┤ļŻ©ņ¢┤ņ¦ĆļŖö ļ░śļ®┤ņŚÉ ļ│Ė ņĢ╝ņÖĖņŗżĒŚś ĒÖśĻ▓ĮņØś Ļ▓ĮņÜ░, ņ£ĀļÅÖĒĢśļŖö ļīĆĻĖ░ ļ░Å UAVņŚÉ ņØśĒĢśņŚ¼ ņ”ØĻĖ░Ļ░Ć ĒÖĢņé░ĒĢśņŚ¼ ņśżņŚ╝ ņśüņŚŁņØ┤ ļäōņ¢┤ņ¦Ćļ»ĆļĪ£ ņĀ£ĒĢ£ļÉ£ ņŗżĒŚś ņśüņŚŁņŚÉņä£ ņśżņŚ╝ ļåŹļÅä ņ░©ņØ┤ļŖö ņ׳ņ£╝ļéś ņśżņŚ╝/ļ╣äņśżņŚ╝ Ļ▓ĮĻ│äĻ░Ć ļ¬ģĒÖĢĒĢśņ¦Ć ņĢŖĻ│Ā UAVņØś ļ╣äņśżņŚ╝ ņ¦ĆņŚŁņ£╝ļĪ£ņØś ņØ┤ļÅÖņŚÉļÅä ļČłĻĄ¼ĒĢśĻ│Ā ĒÖöĒĢÖņśżņŚ╝ņÜ┤Ļ│╝ UAVņŚÉ Ēāæņ×¼ļÉ£ ņä╝ņä£ņØś ņĀæņ┤ēņØ┤ ņØ╝ļČĆ ņØ┤ļŻ©ņ¢┤ņ¦ĆĻ│Ā ņ׳ļŖö Ļ▓░Ļ│╝ļĪ£ ņČöņĀĢļÉ£ļŗż. ņāüĻĖ░ņØś ĒāÉņ¦ĆņŗĀĒśĖ ņÜöļÅÖ ĒśäņāüņØĆ, ņśżņŚ╝ņÜ┤ Ēü¼ĻĖ░Ļ░Ć ļ¦żņÜ░ ņ╗żņä£ ĒāÉņ¦Ćņä╝ņä£ ņŻ╝ļ│Ć ņśżņŚ╝ļåŹļÅäĻ░Ć UAVņŚÉ ņØśĒĢ£ ņ£ĀļÅÖņן ļ│ĆĒÖöņŚÉļÅä ļČłĻĄ¼ĒĢśĻ│Ā ĻĘĀņØ╝ĒĢĀ Ļ▓ĮņÜ░ Ļ░ÉņåīļÉĀ Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ļÉśļ®░, ĒāÉņ¦ĆņŗĀĒśĖņŚÉ ļģĖņØ┤ņ”ł ĒĢäĒä░ļ¦ü ĻĖ░ņłĀ ļ░Å ņĄ£ĻĘ╝ ĒÖ£ļ░£ĒĢśĻ▓ī ņŚ░ĻĄ¼ļÉśĻ│Ā ņ׳ļŖö ĒāÉņ¦ĆņŗĀĒśĖ ņ▓śļ”¼ĻĖ░ņłĀņØ┤ ņĀüņÜ®ļÉĀ Ļ▓ĮņÜ░ Ļ░ĆņŖż ņŗØļ│äņä▒ Ē¢źņāüĻ│╝ ĒĢ©Ļ╗ś Ļ╣©ļüŚĒĢśĻ│Ā ņĀĢĒÖĢĒĢ£ ĒāÉņ¦ĆĒö╝Ēü¼ ĒÜŹļōØņØ┤ Ļ░ĆļŖźĒĢĀ Ļ▓āņ£╝ļĪ£ ņśłņāüļÉ£ļŗż[19]. ĒāÉņ¦Ćņä╝ņä£ņØś ļ░śņØæņŗ£Ļ░äņØĆ ņĢ╝ņÖĖņŗżĒŚśĻ│╝ ņ▒öļ▓äņŗżĒŚś ļ¬©ļæÉ 2ņ┤ł ņØ┤ļé┤ļĪ£ ņ”ēĻ░üņĀü ļ░śņØæ Ļ▓░Ļ│╝ļź╝ ļéśĒāĆļé¼ļŗż. ĒĢ£ĒÄĖ, CNT ĻĖ░ļ░ś Ļ░ĆņŖżĒāÉņ¦Ć ņä╝ņä£ļŖö ņŖĄļÅäņÖĆ ņś©ļÅäņØś ņśüĒ¢źņØä ļ░øņ£╝ļ»ĆļĪ£ ņĖĪņĀĢĒÖśĻ▓ĮņŚÉ ļö░ļØ╝ ĒāÉņ¦ĆņŗĀĒśĖņØś Ēü¼ĻĖ░Ļ░Ć ļŗ¼ļØ╝ņ¦ł ņłś ņ׳ļŖöļŹ░, ĒŖ╣Ē׳ ņŖĄļÅäņØś ņśüĒ¢źņØ┤ ņ╗żņä£ ņŖĄļÅä ņä╝ņä£ļĪ£ ņŚ░ĻĄ¼ļÉśĻĖ░ļÅä ĒĢ£ļŗż[20Ōł╝22]. ĻĘĖļ¤¼ļéś ņĖĪņĀĢĒÖśĻ▓ĮņŚÉ ļö░ļØ╝ Ļ░ÉļÅä ļ░Å ņŗĀĒśĖ Ēü¼ĻĖ░ļŖö ļŗżļź╝ ņłś ņ׳ņ£╝ļéś ņśżņŚ╝ ņ£Ā/ļ¼┤ ĒīÉļŗ© ļ░Å ĒāÉņ¦Ćņä╝ņä£ļĪ£ ņĀüņÜ®ņØ┤ Ļ░ĆļŖźĒĢśļŗż.
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£, ņøÉĻ▒░ļ”¼ņÖĆ ņĀæņ┤ēņŗØ ĒāÉņ¦Ćļ░®ņŗØņØä ņØ┤ņÜ®ĒĢśņŚ¼ DMMP ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØä ĒāÉņ¦ĆĒĢ£ Ļ▓░Ļ│╝, ļæÉ Ļ░Ćņ¦Ć ĒāÉņ¦Ćļ░®ņŗØ ņŚÉ ņØśĒĢ£ DMMP ņ”ØĻĖ░ ĒāÉņ¦ĆĻ▓░Ļ│╝ ļ¬©ļæÉ ņŗĀņåŹĒĢśĻ│Ā ļ¬ģĒÖĢĒĢ£ ĒāÉņ¦ĆĻ▓░Ļ│╝ļź╝ ĒÜŹļōØĒĢĀ ņłś ņ׳ņŚłļŗż. ĒŖ╣Ē׳ ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦Ć UAVļŖö ņä╝ņä£ņØś ĒāÉņ¦ĆĻ▓░Ļ│╝ņÖĆ GPSņóīĒæ£ ļō▒ ļ╣äĒ¢ēņĀĢļ│┤ļź╝ ĒĢ©Ļ╗ś ņĀäņåĪĒĢśņŚ¼ ĒÖöĒĢÖņśżņŚ╝ņÜ┤ņØś ņĀĢĒÖĢĒĢ£ ņ£äņ╣śļź╝ ņŗżņŗ£Ļ░äņ£╝ļĪ£ ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż.
Ļ▓░ ļĪĀ
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö, ĻĖ░ņĪ┤ņØś Ļ│ĀņĀĢņŗØ Ēś╣ņØĆ ļ│æņé¼Ē£┤ļīĆņÜ® Ļ░£ļģÉņ£╝ļĪ£ ņÜ┤ņÜ®ļÉśļŖö ĒÖöĒĢÖĒāÉņ¦Ćņä╝ņä£ņØś ņØ┤ļÅÖ ņĀ£ĒĢ£ņĀüņØĖ ņÜ┤ņÜ®ļ░®ņŗØĻ│╝ ļ╣äĻĄÉļÉśļŖö Ļ░£ļģÉņ£╝ļĪ£ņä£ ņåīĒśĢņØś UAV Ēöīļ×½ĒÅ╝ņØä ĒÖ£ņÜ®ĒĢśņŚ¼ ĻĖ░ļÅÖņä▒ņØä ĒÜŹĻĖ░ņĀüņ£╝ļĪ£ ņ”ØĻ░Ćņŗ£Ēéżļ®┤ņä£, ņāüņØ┤ĒĢ£ ļæÉ ņóģļźśņØś ĒāÉņ¦ĆĻĖ░ņłĀņØä ļÅÖņŗ£ ņĀüņÜ®ĒĢ£ ļ│ĄĒĢ®ĒśĢ ĒÖöĒĢÖņśżņŚ╝ņÜ┤ ĒāÉņ¦Ćļ░®ņŗØņØä ņŗ£ļÅäĒĢśņśĆĻ│Ā ņĢ╝ņĀä ņÜ┤ņÜ®Ļ░ĆļŖźņä▒ņØä ĒÖĢņØĖĒĢśņśĆļŗż.
ņøÉĻ▒░ļ”¼ ĒÖöĒĢÖĒāÉņ¦ĆņÖĆ ņĀæņ┤ēņŗØ ĒÖöĒĢÖĒāÉņ¦Ć ļæÉ ļ░®ņŗØņØä Ļ░ĆņŖżĒāÉņ¦ĆņŚÉ ņł£ņ░©ņĀüņ£╝ļĪ£ ņĀüņÜ®ĒĢśņŚ¼ ĒÖöĒĢÖņśżņŚ╝ ĒāÉņ¦Ćļź╝ ņłśĒ¢ēĒĢ©ņ£╝ļĪ£ņä£ ņśżņŚ╝ņÜ┤ ņśüņāüĒÜŹļōØņŚÉ ņØśĒĢ£ ņ┤łļÅÖĒāÉņ¦Ć ļ░Å ņĀæņ┤ēņŗØ ĒāÉņ¦ĆņŚÉ ņØśĒĢ£ ņĀĢļ░ĆĒāÉņ¦ĆņØś ļ│ĄĒĢ®ĒāÉņ¦ĆĻĖ░ņłĀ ņÜ┤ņÜ®ņØś Ļ░ĆļŖźņä▒ņØä ĒÖĢņØĖĒĢśņśĆļŗż. ņØ┤ ļ│ĄĒĢ®ĒāÉņ¦ĆĻĖ░ņłĀņØĆ ĒÖöņāØļ░® ļśÉļŖö ņśżņŚ╝ĒÖĢņé░ ņé¼Ļ▒┤ ļ░£ņāØņŗ£, ĒÖĢņé░ņśłņĖĪ ĒöäļĪ£ĻĘĖļש(ĒÖöņāØļ░® ĒåĄĒĢ®ļ¬©ļŹĖ)ņØś ņśłņĖĪ Ļ▓░Ļ│╝ļź╝ ņŗżņŗ£Ļ░äņ£╝ļĪ£ ĒÖĢņØĖĒĢ©ņ£╝ļĪ£ņä£ ņĪ░ĻĖ░Ļ▓Įļ│┤ ĻĖ░ļŖźņØä ĻĄ¼ĒśäĒĢśĻ│Ā ņØĖļ¬ģĒö╝ĒĢ┤ļź╝ ņżäņØ┤ļŖöļŹ░, ĒÜŹĻĖ░ņĀüņ£╝ļĪ£ ĻĖ░ņŚ¼ĒĢĀ ņłś ņ׳ņØä Ļ▓āņØ┤ļŗż.




