



м„ң лЎ
м„ёкі„м ҒмңјлЎң н•ҙкө° н•Ём •л“Өмқҳ м „нҲ¬мІҙкі„ л°Ҹ нғ‘мһ¬л¬ҙмһҘл“Өмқҳ лӢӨм–‘нҷ”м—җ л”°лқј н•Ём • м „нҲ¬мІҙкі„л“Өмқҳ лІ”мҡ©нҷ” к°ңл°ң[1]мқҙ мқҙлЈЁм–ҙм§Җкі мһҲкі , м „нҲ¬мІҙкі„мҷҖ л¬ҙмһҘ к°„мқҳ м—°лҸҷ н”„лЎңнҶ мҪңлҸ„ н‘ңмӨҖнҷ”[2]н•ҳкі мһҲмңјл©°, мҲңм–‘н•Ёкіј кө¬м¶•н•Ёмҡ© мқҙм§ҖмҠӨ м „нҲ¬мІҙкі„(лҜёкөӯ)лҠ” нҳ„лҢҖнҷ” кі„нҡҚм—җ л”°лқј нҳёнҷҳм„ұмқ„ мң„н•ң Baseline к°ңл…җ[3,4]мңјлЎң к°ңл°ңлҗҳкі мһҲлӢӨ. м „нҲ¬мІҙкі„мҷҖ м—°лҸҷн•ҳм—¬ мҡҙмҡ©лҗҳм–ҙм•ј н•ҳлҠ” көӯлӮҙ к°ңл°ң лҢҖн•Ё, лҢҖкіө л°Ҹ лҢҖм§Җ л¬ҙмһҘмІҙкі„мқҳ кІҪмҡ°м—җлҸ„ л¬ҙмһҘ к°„мқҳ нҳёнҷҳм„ұмқ„ кі л Өн•ң к°ңл°ңмқҙ н•„мҲҳм ҒмңјлЎң мҡ”кө¬лҗҳл©°, л”°лқјм„ң л¬ҙмһҘ нҳёнҷҳ мҡҙмҡ©мқ„ мң„н•ң н•ҳл“ңмӣЁм–ҙ л°Ҹ мҶҢн”„нҠёмӣЁм–ҙ м•„нӮӨн…ҚмІҳ м„Өкі„к°Җ н•„мҲҳм ҒмқҙлӢӨ.
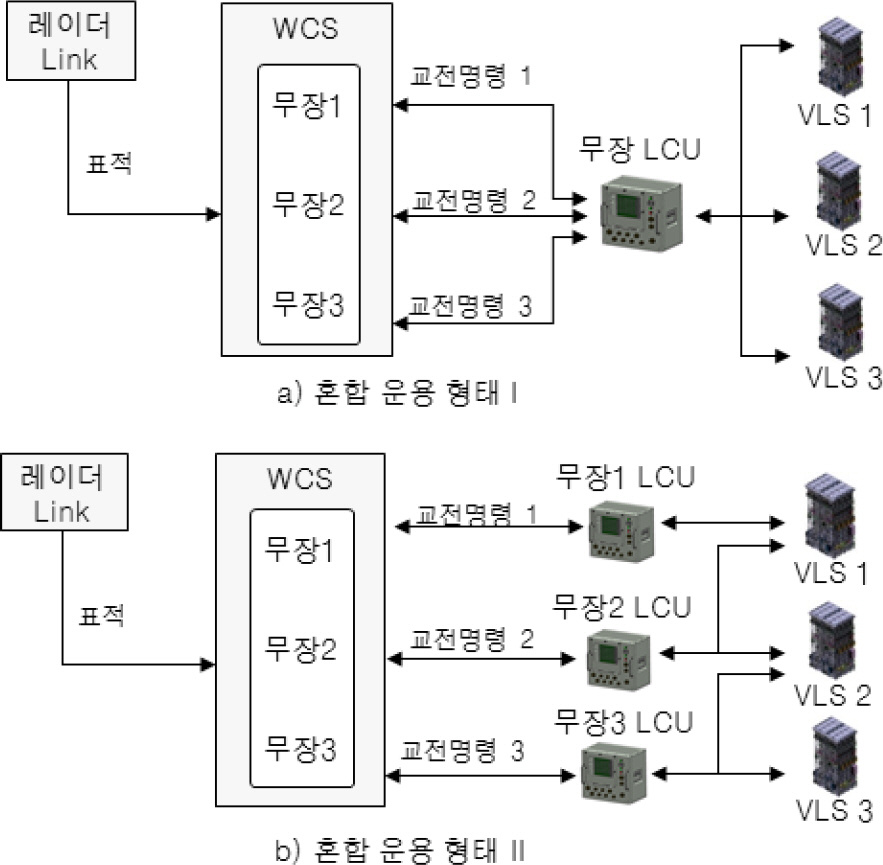
н•Ём •м—җ кё°мЎҙм—җ к°ңл°ңлҗң лӢӨмҲҳмқҳ л¬ҙмһҘмІҙкі„лҘј нғ‘мһ¬н• кІҪмҡ°, Fig. 1кіј к°ҷмқҙ к°Ғ л¬ҙмһҘмІҙкі„лҠ” к°ңлі„м ҒмңјлЎң нғ‘мһ¬лҗ мҲҳл°–м—җ м—ҶлӢӨ. мқҙ кө¬мЎ°м—җм„ңлҠ” л¬ҙмһҘмІҙкі„ л°ңмӮ¬м ңм–ҙкё°(Launch Control Unit)м—җм„ң мҲҳм§Ғл°ңмӮ¬лҢҖ(Vertical Launching System, мқҙн•ҳ л°ңмӮ¬лҢҖлқјкі н•Ё) л°Ҹ мң лҸ„нғ„мқҳ нҳјн•© мҡҙмҡ©мқҙ л¶Ҳк°Җн•ҳлҜҖлЎң м „нҲ¬мІҙкі„ WCS(Weapon Control System)м—җм„ң л¬ҙмһҘмІҙкі„ к°ңлі„лЎң көҗм „ лӘ…л №мқ„ мҶЎмӢ н•ҳкі , л¬ҙмһҘмІҙкі„лҠ” к°Ғк°Ғмқҳ л°ңмӮ¬м ңм–ҙкё°м—җм„ң мң лҸ„нғ„мқ„ л°ңмӮ¬н•ҳкІҢ лҗңлӢӨ. мқҙлҹ° кө¬м„ұмқҖ л¬ҙмһҘмІҙкі„ нғ‘мһ¬ к°„м—җ нҳёнҷҳ л°Ҹ нҷ•мһҘмқҙ л¶Ҳк°Җн•ҳл©°, л¬ҙмһҘ мҲҳм—җ лҢҖ비 мһҘ비 мҲҳлҹүмқҙ мҰқк°Җн•ҳм—¬ мһҘ비кіөк°„мқҙ лҠҳм–ҙлӮҳкі , мҡҙмҡ© л°Ҹ 비мҡ© мёЎл©ҙм—җм„ңлҸ„ 비нҡЁмңЁм ҒмқҙлӢӨ. к·ёлҹ¬лҜҖлЎң н–Ҙнӣ„ к°ңл°ң н•Ём • л¬ҙмһҘмІҙкі„лҠ” л¬ҙмһҘ мғҒнҳёк°„м—җ нҳёнҷҳм„ұкіј нҷ•мһҘ мң м—°м„ұмқҙ н•„мҲҳм ҒмңјлЎң мҡ”кө¬лҗңлӢӨ.

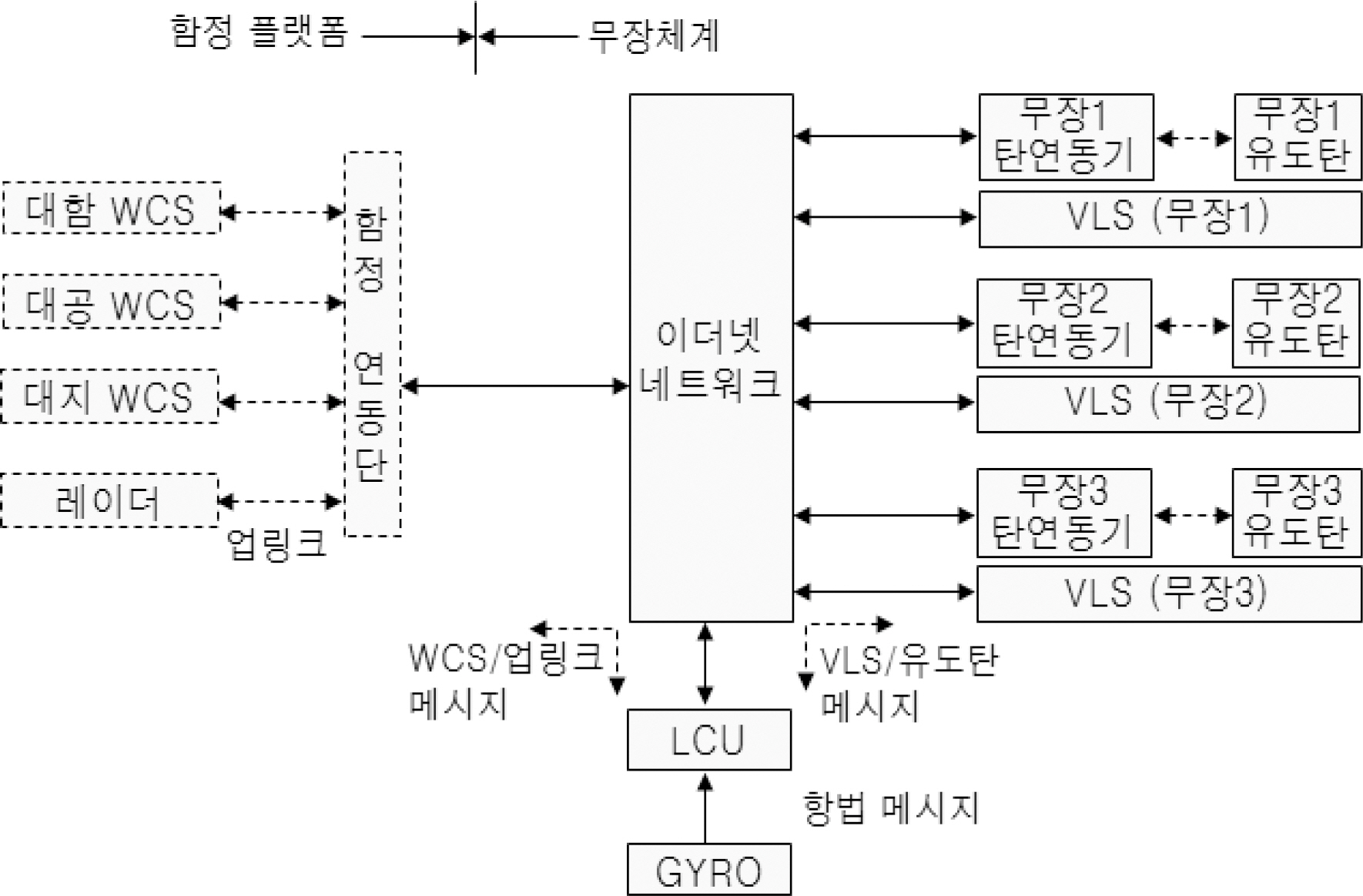
лӢӨмҲҳ л¬ҙмһҘмқ„ м ңм–ҙн• мҲҳ мһҲлҠ” нҳёнҷҳм„ұкіј нҷ•мһҘм„ұмқ„ к°Җ진 л°ңмӮ¬м ңм–ҙкё°лҘј м Ғмҡ©н•ң н•Ём • л¬ҙмһҘмІҙкі„мқҳ кө¬м„ұмқҖ Fig. 2мҷҖ к°ҷмңјл©°, л°ңмӮ¬м ңм–ҙкё°лҘј мӨ‘мӢ¬мңјлЎң л°ңмӮ¬лҢҖ л°Ҹ мң лҸ„нғ„мқҳ лӢӨм–‘н•ң л¬ҙмһҘ нҳјн•© мҡҙмҡ©мқҙ к°ҖлҠҘн•ҳлӢӨ. л°ңмӮ¬м ңм–ҙкё°лҠ” мң лҸ„нғ„ мў…лі„ мқёлІӨнҶ лҰ¬лҘј н•Ём • м „нҲ¬мІҙкі„ WCSм—җ ліҙкі н•ҳкі , WCSлҠ” л¬ҙмһҘ(мң лҸ„нғ„)лі„ көҗм „ лӘ…л №мқ„ л°ңмӮ¬м ңм–ҙкё°лЎң мҶЎмӢ н•ҳл©°, л°ңмӮ¬м ңм–ҙкё°лҠ” л¬ҙмһҘлі„ л°ңмӮ¬м Ҳм°ЁлҘј мҲҳн–үн•ҳм—¬ мң лҸ„нғ„мқ„ л°ңмӮ¬н• мҲҳ мһҲлӢӨ. мқҙлҹ° кө¬м„ұмқҖ л¬ҙмһҘ к°„ ліҖкІҪ л°Ҹ нҷ•мһҘ мӢңм—җлҸ„ нҒ° ліҖкІҪ м—Ҷмқҙ м Ғмҡ© к°ҖлҠҘн•ҳлӢӨлҠ” нҒ° мһҘм җмқҙ мһҲлӢӨ. мқҙм§Ҳм Ғмқё н•Ём •мҡ© лҢҖкіө, лҢҖн•Ё л°Ҹ лҢҖм§Җ л¬ҙмһҘмІҙкі„ к°„мқҳ нҳјн•© мҡҙмҡ©мқ„ мң„н•ҙм„ңлҠ” л¬ҙмһҘ мқҙлҚ”л„· л„ӨнҠёмӣҢнҒ¬ кө¬м„ұкіј л¬ҙмһҘ м—°лҸҷ л©”мӢңм§Җ л°Ҹ л°ңмӮ¬м ңм–ҙкё° мҶҢн”„нҠёмӣЁм–ҙмқҳ н‘ңмӨҖнҷ” кё°мӨҖмқҙ н•„мҡ”н•ҳлӢӨ. мҶҢн”„нҠёмӣЁм–ҙмқҳ кІҪмҡ° м•Ҳм •м„ұмқ„ мң„н•ң лӘЁлҚё кё°л°ҳ к°қмІҙ кө¬мЎ°[5,6] м„Өкі„мҷҖ к°қмІҙ м»ҙнҸ¬л„ҢнҠёл“Өмқҳ м—°лҸҷ нҳёнҷҳм„ұ[7,8] м„Өкі„к°Җ мҡ”кө¬лҗҳл©°, мөңмў…м ҒмңјлЎң мҶҢн”„нҠёмӣЁм–ҙмқҳ м•Ҳм •м„ұ кІҖмҰқ[9]мқҙ мҡ”кө¬лҗңлӢӨ.
лӢӨмҲҳ л¬ҙмһҘмқҳ нҳјн•© мҡҙмҡ©мқҙ к°ҖлҠҘн•ң л°ңмӮ¬м ңм–ҙкё°лҘј нҸ¬н•Ён•ң л¬ҙмһҘмІҙкі„ кё°ліё м•„нӮӨн…ҚмІҳлҠ” Fig. 3кіј к°ҷмңјл©°, л°ң мӮ¬м ңм–ҙкё°м—җлҠ” нҳјн•© мҡҙмҡ© мҶҢн”„нҠёмӣЁм–ҙк°Җ нғ‘мһ¬лҗңлӢӨ. л°ңмӮ¬м ңм–ҙкё°лҠ” мқҙлҚ”л„· кё°л°ҳмңјлЎң н•Ём • н”Ңлһ«нҸј л°Ҹ л¬ҙмһҘмІҙкі„ мһҘ비л“Өкіј л©”мӢңм§ҖлҘј мҶЎмҲҳмӢ н•ңлӢӨ. н•Ём • л ҲмқҙлҚ”лҘј нҶөн•ң м—…л§ҒнҒ¬к°Җ мҡ”кө¬лҗҳлҠ” лҢҖкіө л¬ҙмһҘмқҳ кІҪмҡ° л°ңмӮ¬м ңм–ҙкё°м—җм„ң н•Ём • м—°лҸҷлӢЁмқ„ нҶөн•ҳм—¬ л ҲмқҙлҚ”лЎң м—…л§ҒнҒ¬ м •ліҙлҘј м „мҶЎн•ңлӢӨ. ліё л…јл¬ёмқҖ лҢҖн•Ё, лҢҖкіө л°Ҹ лҢҖм§Җ л¬ҙмһҘмІҙкі„мқҳ нҳёнҷҳ мҡҙмҡ©мқ„ мң„н•ң м•„нӮӨн…ҚмІҳлҘј м ңм•Ҳн•ҳкі , л¬ҙмһҘмІҙкі„ л„ӨнҠёмӣҢнҒ¬ кө¬м„ұм•Ҳкіј л¬ҙмһҘ м—°лҸҷ л©”мӢңм§Җл“Өмқҳ н‘ңмӨҖм•Ҳ л°Ҹ л°ңмӮ¬м ңм–ҙкё° мҶҢн”„нҠёмӣЁм–ҙмқҳ н‘ңмӨҖм•Ҳмқ„ м ңмӢңн•ңлӢӨ. лҳҗн•ң м ңм•Ҳлҗң нҳјн•© л¬ҙмһҘ л°ңмӮ¬м ңм–ҙкё° мҶҢн”„нҠёмӣЁм–ҙк°Җ м ңмӢңлҗң кё°лІ•лҢҖлЎң лҸҷмһ‘н•ҳлҠ” м§Җм—җ лҢҖн•ң мӢң뮬л Ҳмқҙм…ҳ кІ°кіјлҘј м ңмӢңн•ңлӢӨ.
нҳёнҷҳм„ұмқ„ мң„н•ң л¬ҙмһҘмІҙкі„ н•ҳл“ңмӣЁм–ҙ л°Ҹ мҶҢн”„нҠёмӣЁм–ҙ
2.1 л¬ҙмһҘ л„ӨнҠёмӣҢнҒ¬ кө¬м„ұ
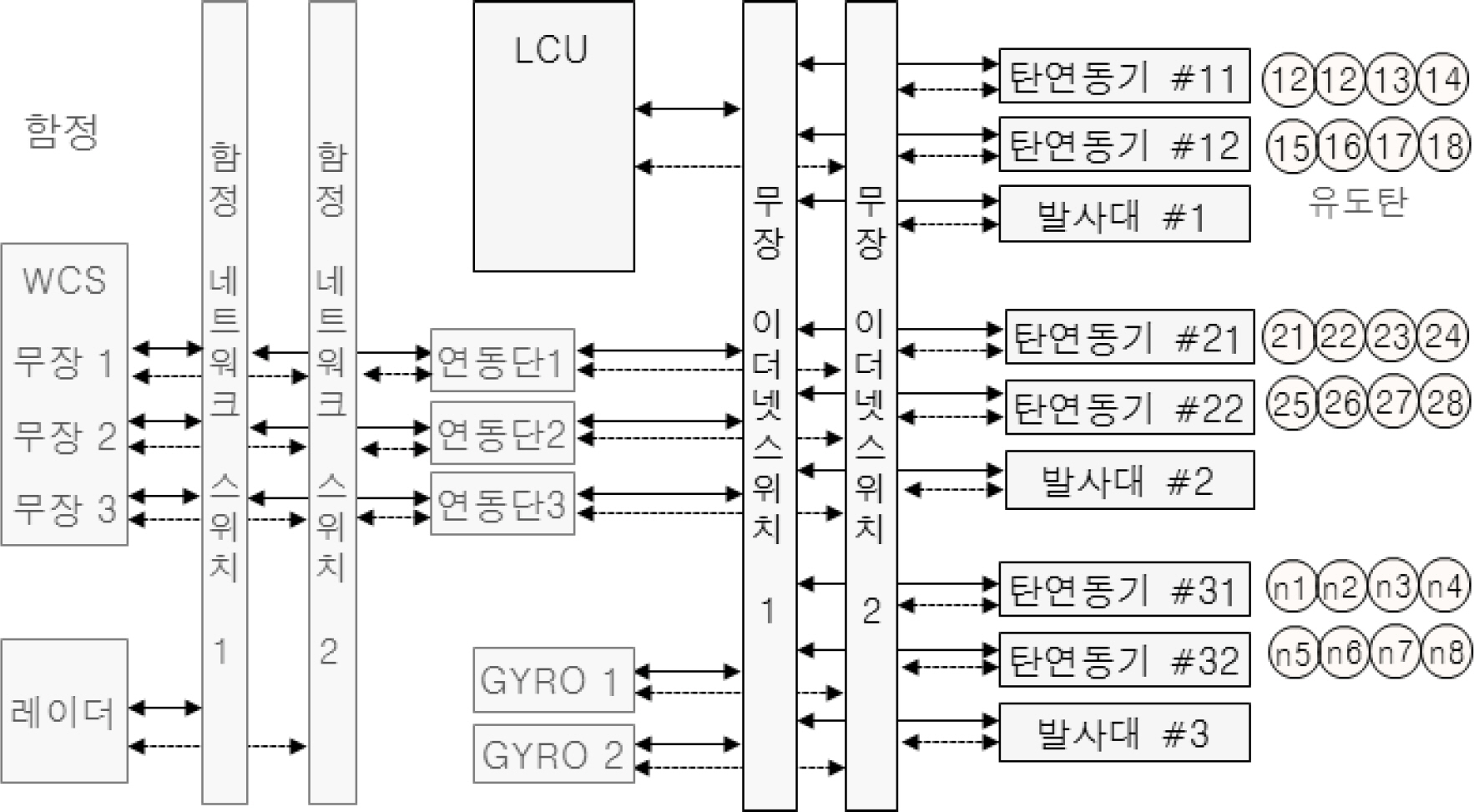
л°ңмӮ¬м ңм–ҙкё°к°Җ н•Ём • н”Ңлһ«нҸјкіј л°ңмӮ¬лҢҖ л°Ҹ мң лҸ„нғ„мқ„ нҳёнҷҳ мҡҙмҡ©н•ҳкё° мң„н•ҙм„ңлҠ” Fig. 4мҷҖ к°ҷмқҖ мқҙлҚ”л„· л„ӨнҠёмӣҢнҒ¬мқҳ кө¬м„ұмқҙ н•„мҡ”н•ҳлӢӨ. мқҙлҚ”л„·мқ„ м§Җмӣҗн•ҳм§Җ м•ҠлҠ” кө¬м„ұмһҘ비(мҳҲлЎң н•Ём • мһҗмқҙлЎңлҠ” RS-422 нҶөмӢ л°©мӢқмқј мҲҳ мһҲмқҢ)м—җлҠ” м „лӢЁм—җ мқҙлҚ”л„· ліҖнҷҳкё°к°Җ нғ‘мһ¬лҗҳм–ҙм•ј н•ҳл©°, ліҖнҷҳкё°м—җ лҢҖн•ҙм„ңлҠ” лі„лҸ„ н‘ңкё°н•ҳм§Җ м•ҠлҠ”лӢӨ. л°ңмӮ¬м ңм–ҙкё°лҠ” н•Ём • м—°лҸҷлӢЁмқ„ нҶөн•ҳм—¬ н•Ём • м „нҲ¬мІҙкі„мқҳ WCS л°Ҹ л ҲмқҙлҚ”мҷҖ м—°лҸҷн•ҳл©°, л¬ҙмһҘ мқҙлҚ”л„· л„ӨнҠёмӣҢнҒ¬лҘј нҶөн•ҳм—¬ н•Ём • мһҗмқҙлЎң, нғ„м—°лҸҷкё° л°Ҹ л°ңмӮ¬лҢҖмҷҖ м—°лҸҷн•ңлӢӨ. нғ„м—°лҸҷкё°лҠ” лҢҖн•Ё, лҢҖкіө л°Ҹ лҢҖм§Җ мң лҸ„нғ„кіј л¬ҙмһҘ к°ңлі„мқҳ мқён„°нҺҳмқҙмҠӨлЎң м—°лҸҷн•ңлӢӨ. мқҙлҹ° л„ӨнҠёмӣҢнҒ¬ кө¬м„ұмқҖ л¬ҙмһҘ к°„мқҳ кө¬м„ұ ліҖкІҪ л°Ҹ нҷ•мһҘ мҡҙмҡ©м—җ лҢҖн•ҳм—¬ мң м—°м„ұмқ„ м ңкіөн•ҳлҜҖлЎң н•„мҲҳм ҒмңјлЎң м Ғмҡ©мқҙ кі л Өлҗҳм–ҙм•ј н•ңлӢӨ.
2.2 л¬ҙмһҘ л©”мӢңм§Җ мқҙмӨ‘нҷ” мҶЎмҲҳмӢ н”„лЎңнҶ мҪң
л¬ҙмһҘ мқҙмӨ‘нҷ” л„ӨнҠёмӣҢнҒ¬м—җм„ң л©”мӢңм§Җ мҶЎмҲҳмӢ н”„лЎңнҶ мҪңмқҖ Replication кё°лІ•мқ„ м Ғмҡ©н•ҳл©°, мҶЎмӢ мһҗлҠ” л©”мӢңм§ҖлҘј л„ӨнҠёмӣҢнҒ¬лЎң мқҙмӨ‘ мҶЎмӢ н•ңлӢӨ. мҲҳмӢ мһҗлҠ” лЁјм Җ лҸ„м°©н•ң л©”мӢңм§ҖлҘј мӮ¬мҡ©н•ңлӢӨ. мқҙмӨ‘нҷ” кё°лІ•мқҳ л©”мӢңм§Җ мІҳлҰ¬лҘј мң„н•ҙм„ңлҠ” л©”мӢңм§Җ нҢЁнӮ·мқҳ н—ӨлҚ”м—җ Sequence Numberмқҳ м Ғмҡ©мқҙ н•„мҡ”н•ҳлӢӨ.
2.3 л°ңмӮ¬м ңм–ҙкё° мҶҢн”„нҠёмӣЁм–ҙ
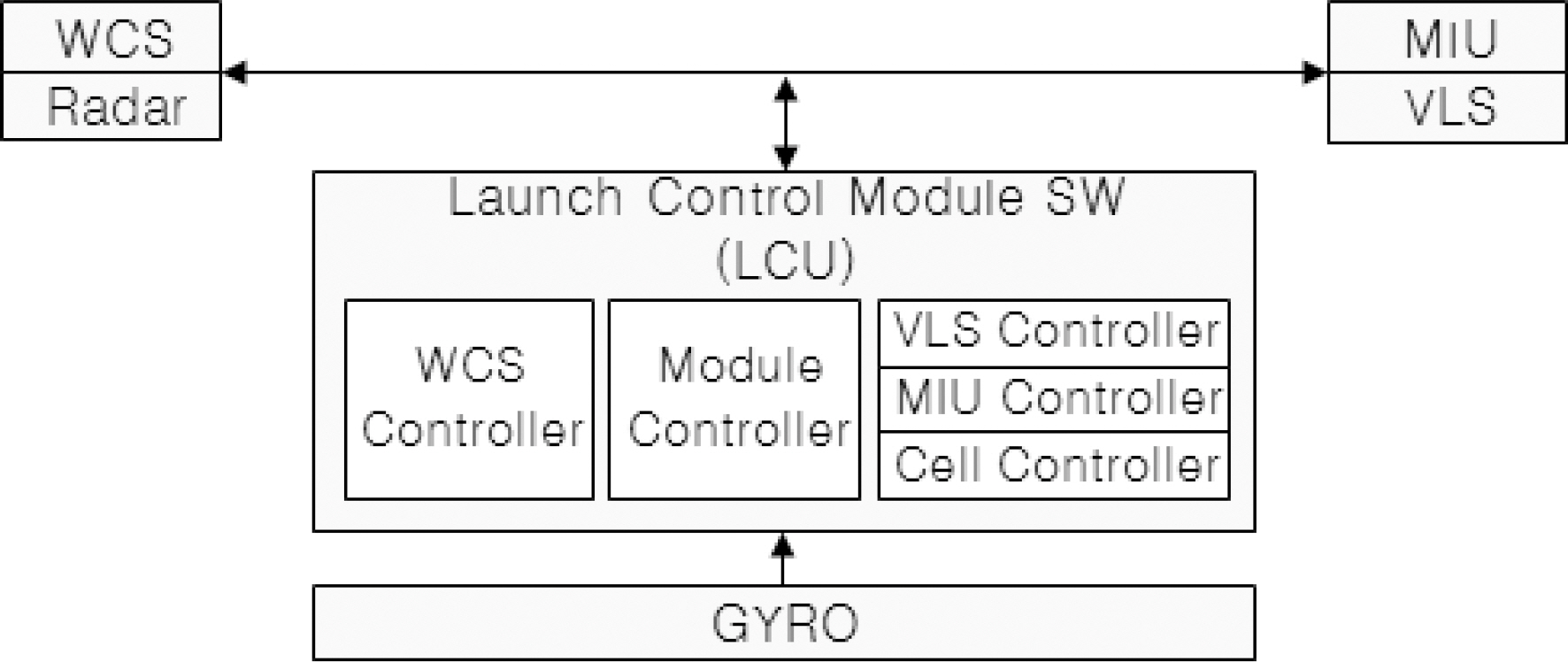
л¬ҙмһҘ нҳёнҷҳм„ұмқ„ мң„н•ҳм—¬ л°ңмӮ¬м ңм–ҙкё°м—җлҠ” Fig. 5мҷҖ к°ҷмқҖ LCM(Launch Control Module) мҶҢн”„нҠёмӣЁм–ҙк°Җ н•„мҡ”н•ҳл©°, LCM мҶҢн”„нҠёмӣЁм–ҙлҠ” н•Ём • WCS, л°ңмӮ¬лҢҖ(VLS), нғ„м—°лҸҷкё°(MIU) л°Ҹ Cell(мң лҸ„нғ„) л“Өмқҳ нҳёнҷҳ мҡҙмҡ©мқ„ мң„н•ң м—°лҸҷ Controller Class л“Өкіј л°ңмӮ¬м ңм–ҙкё°лҘј мҡҙмҡ©н•ҳкі л°ңмӮ¬м Ҳм°ЁлҘј мғқм„ұ нҶөм ңн•ҳлҠ” Module Controller ClassлЎң кө¬м„ұлҗңлӢӨ.
LCM мҶҢн”„нҠёмӣЁм–ҙ
3.1 LCM мҶҢн”„нҠёмӣЁм–ҙ Class Diagram
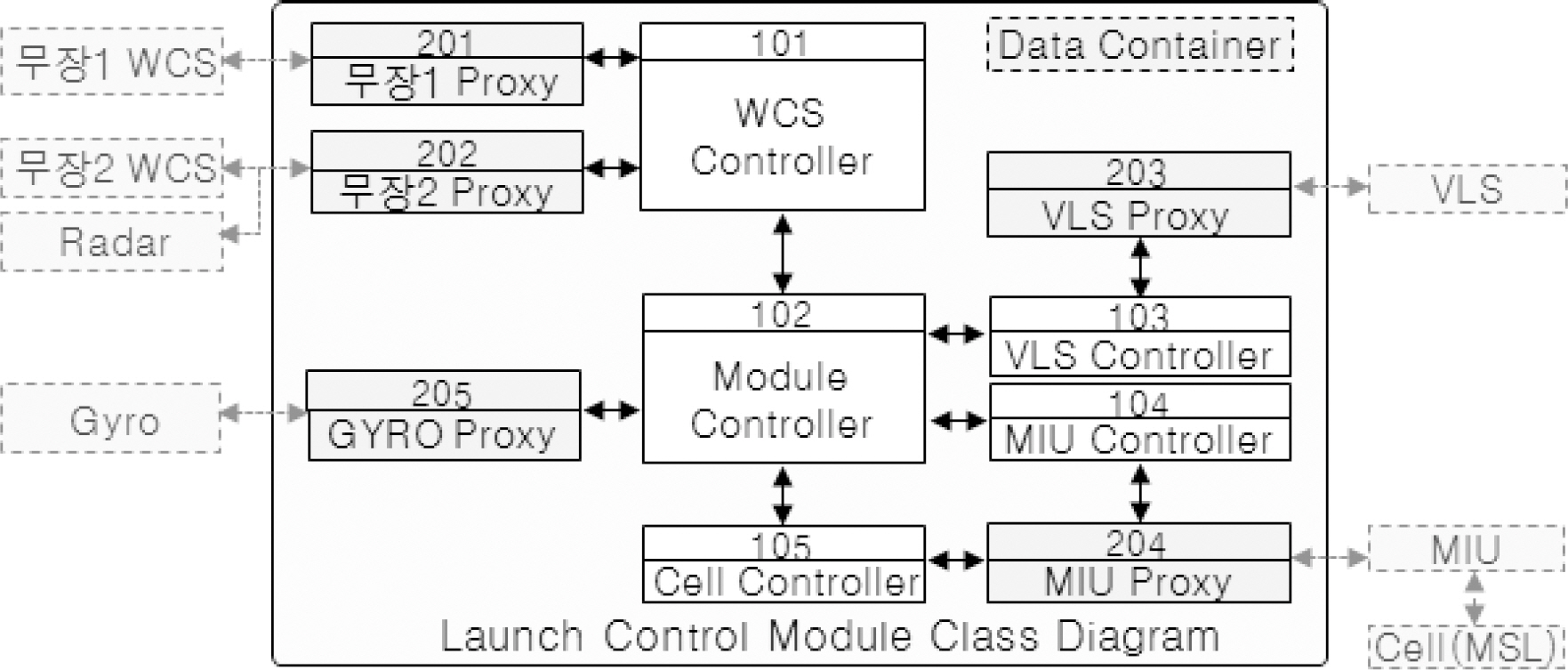
л¬ҙмһҘ1кіј л¬ҙмһҘ2лҘј нҳјн•© мҡҙмҡ©н•ҳлҠ” LCMмқҳ Class DiagramмқҖ Fig. 6кіј к°ҷкі , Classлі„ кё°лҠҘмқҖ Table 1кіј к°ҷлӢӨ. лӢӨмҲҳмқҳ л¬ҙмһҘмңјлЎң нҷ•мһҘмқҙ к°ҖлҠҘн•ҳлӮҳ, 2 к°ңмқҳ л¬ҙмһҘ л§Ңмқ„ н‘ңнҳ„н•ҳмҳҖлӢӨ. Data Container ClassлҠ” Controller к°„м—җ көҗнҷҳлҗҳлҠ” л¬ҙмһҘ м •ліҙмқҙлӢӨ.
TableВ 1.
Function of LCM software classes
| Class | Function |
|---|---|
| WCS Controller | |
| Module Controller | |
| VLS Controller | |
| MIU Controller | |
| Cell Controller | |
| Data Container | |
| л¬ҙмһҘ1 Proxy | |
| л¬ҙмһҘ2 Proxy | |
| MIU Proxy | |
| VLS Proxy | |
| GYRO Proxy |
3.2 LCM мҶҢн”„нҠёмӣЁм–ҙ Data Flow
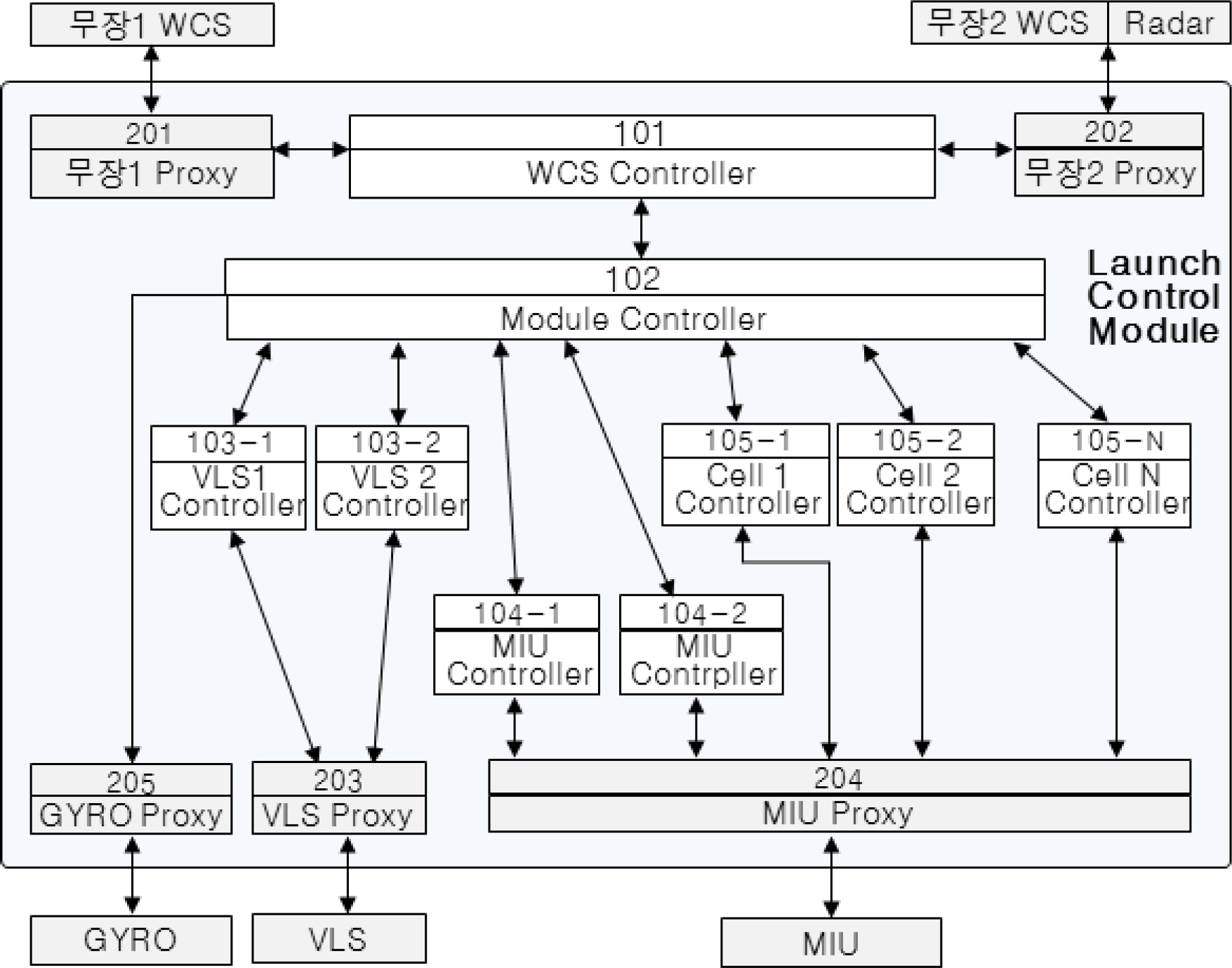
LCM Objectл“Ө к°„мқҳ Data FlowлҠ” Fig. 7кіј к°ҷмңјл©°, м „нҲ¬мІҙкі„ WCS, л ҲмқҙлҚ”, н•Ём • мһҗмқҙлЎң, л°ңмӮ¬лҢҖ к·ёлҰ¬кі нғ„м—°лҸҷкё° мқён„°нҺҳмқҙмҠӨлҘј нҸ¬н•Ён•ңлӢӨ. мң лҸ„нғ„(Cell) Controller мқҳ к°ңмҲҳлҠ” мң лҸ„нғ„ нғ„мў… мҲҳл§ҢнҒј мғқм„ұлҗҳкі , л°ңмӮ¬лҢҖ(VLS) Controller л°Ҹ нғ„м—°лҸҷкё°(MIU) ControllerлҠ” л°ңмӮ¬лҢҖ к°ңмҲҳмҷҖ нғ„м—°лҸҷкё° к°ңмҲҳл§ҢнҒј мғқм„ұлҗңлӢӨ. мқҙлҹ¬н•ң кё°лІ•мқҖ мқҙкё°мў… мң лҸ„нғ„, нғ„м—°лҸҷкё° л°Ҹ л°ңмӮ¬лҢҖм—җ лҢҖн•ң м—°лҸҷ нҳёнҷҳм„ұл°Ҹ мң м—°м„ұмқ„ м ңкіөн•ңлӢӨ.
3.3 LCM мҶҢн”„нҠёмӣЁм–ҙ м—°лҸҷ л©”мӢңм§Җ к·ёлЈ№
нҳјн•© л¬ҙмһҘмқҳ мҡҙмҡ© л°Ҹ нҶөм ң нҳёнҷҳм„ұмқ„ мң„н•ҙм„ңлҠ” LCM лӮҙл¶Җмқҳ Controller Object к°„м—җ көҗнҷҳлҗҳлҠ” Dataмқҳ м „мҶЎ м Ҳм°Ё л°Ҹ мҷёл¶Җ м—°лҸҷ л©”мӢңм§Җмқҳ мғқм„ұкіј мҶЎмҲҳмӢ м Ҳм°Ёмқҳ нҳёнҷҳм„ұмқҙ л§Өмҡ° мӨ‘мҡ”н•ҳлӢӨ. л”°лқјм„ң л¬ҙмһҘмІҙкі„мқҳ м—°лҸҷ л©”мӢңм§Җл“Өм—җ лҢҖн•ң кё°лҠҘлі„ к·ёлЈ№нҷ”, л°ңмӮ¬м Ҳм°Ё мқҙлІӨнҠё Dataмқҳ мғқм„ұ л°Ҹ мҶЎмҲҳмӢ , к·ёлҰ¬кі Controller к°„мқҳ мҶЎмҲҳмӢ DataлЎңл¶Җн„° к·ёлЈ№лі„ м—°лҸҷ л©”мӢңм§Җмқҳ мғқм„ұ л°Ҹ мҶЎмҲҳмӢ мқҖ л°ңмӮ¬м ңм–ҙкё° м•„нӮӨн…ҚмІҳ м„Өкі„м—җ н•„мҲҳм ҒмқҙлӢӨ.
Fig. 8мқҖ л°ңмӮ¬м ңм–ҙкё°мқҳ LCM мҶҢн”„нҠёмӣЁм–ҙм—җм„ң мҷёл¶ҖлЎң мҶЎмҲҳмӢ лҗҳлҠ” лӘЁл“ л©”мӢңм§ҖлҘј лӮҳнғҖлӮҙл©°, л©”мӢңм§Җл“ӨмқҖ 1x л°Ҹ 1xx л“ұкіј к°ҷмқҙ ID к·ёлЈ№кө°мңјлЎң н‘ңнҳ„н•ҳмҳҖлӢӨ. мҳҲлЎң, 1xx к·ёлЈ№кө°м—җлҠ” л§ҒнҒ¬м—°лҸҷ м ңм–ҙ л©”мӢңм§Җ, мғҒнғңм •ліҙ мҶЎмҲҳмӢ л©”мӢңм§Җ л°Ҹ мЈјкё°м„ұ м •ліҙ көҗнҷҳ л©”мӢңм§ҖмҷҖ к°ҷмқҖ мһҘ비간 м—°лҸҷ кҙҖл Ё л©”мӢңм§Җл“Өмқҙ нҸ¬н•Ёлҗҳл©°, л©”мӢңм§ҖлҠ” кё°лҠҘлі„лЎң 11, 12, 13, вҖҰ, 14 мӢқлі„мһҗ ID л©”мӢңм§ҖлЎң кө¬м„ұн•ңлӢӨ.
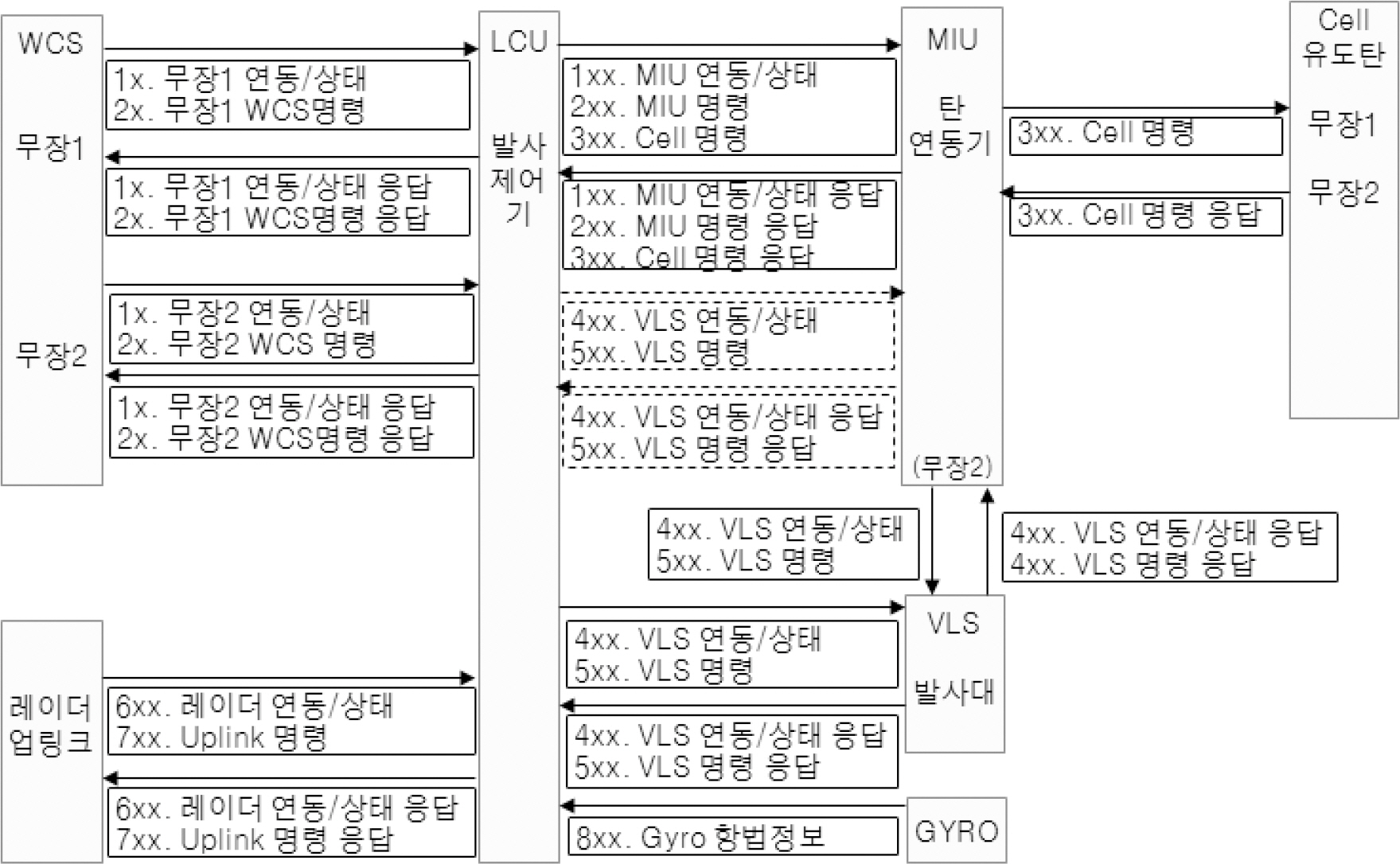
л©”мӢңм§Җ ID(Identification)лҠ” LCMмқҳ к°Ғ Controllerм—җм„ң л©”мӢңм§Җмқҳ м°Ёлі„м Ғ мІҳлҰ¬лҘј мң„н•ң н•„мҡ”н•ҳл©°, LCMм—җм„ң к°ҷмқҖ ID кі„м—ҙ л©”мӢңм§Җ м •ліҙ нқҗлҰ„мқҖ Controller к°„м—җ лҸҷмқјн•ҳл©°, л©”мӢңм§Җ м •ліҙл“ӨмқҖ Class Diagramм—җм„ң Controller к°„м—җ мҶЎмҲҳмӢ лҗҳкі , Proxyм—җм„ң м—°лҸҷ л©”мӢңм§ҖлЎң мғқм„ұлҗҳм–ҙ мҷёл¶Җ мһҘ비лЎң мҶЎмҲҳмӢ лҗңлӢӨ. л°ңмӮ¬м ңм–ҙкё°лҠ” мҷёл¶ҖмһҘ비 м—°лҸҷ мӢң кё°ліём ҒмңјлЎң Point-to-Point л°©мӢқмқҳ л©”мӢңм§Җ м—°лҸҷмқ„ н•ҙм•ј н•ҳм§Җл§Ң л¶Ҳк°Җн”јн•ҳкІҢ лӢӨлҘё ControllerлҘј нҶөн•ҳм—¬ мҷёл¶ҖмһҘ비лЎң л©”мӢңм§Җк°Җ м „лӢ¬лҗҳм–ҙм•ј н•ҳлҠ” кІҪмҡ°(м•„лһҳ Fig. 8м—җм„ң л°ңмӮ¬м ңм–ҙкё°м—җм„ң нғ„м—°лҸҷкё°лҘј кұ°міҗ л°ңмӮ¬лҢҖлЎң м—°лҸҷ л©”мӢңм§Җк°Җ м „лӢ¬лҗҳм–ҙм•ј н•ҳлҠ” кІҪмҡ°)лҠ” мҷёл¶ҖмһҘ비л“Ө к°„м—җ л©”мӢңм§Җ мҶЎмҲҳмӢ мІҳлҰ¬к°Җ лҗҳм–ҙм•ј н•ңлӢӨ.
LCM мҶҢн”„нҠёмӣЁм–ҙ м—°лҸҷ л©”мӢңм§Җ мІҳлҰ¬
4.1 WCS м—°лҸҷ л©”мӢңм§Җ
м „нҲ¬мІҙкі„ WCSмҷҖ л¬ҙмһҘ л°ңмӮ¬м ңм–ҙкё° к°„мқҳ мҶЎмҲҳмӢ л©” мӢңм§Җ к·ёлЈ№мқҖ Table 2мҷҖ к°ҷлӢӨ. 1x л©”мӢңм§Җ к·ёлЈ№мқҖ мһҘ비 к°„ мҙҲкё° л§ҒнҒ¬ м—°кІ°/н•ҙм ң, мғҒнғңм •ліҙ, Weapon Status, көҗм „мғҒнғң, л°ңмӮ¬мғҒнғң, к·ёлҰ¬кі мЈјкё°м„ұ көҗнҷҳ л©”мӢңм§Җ(мҳҲ, мӢңк°„лҸҷкё°)л“Өмқҳ мҡ”мІӯкіј мқ‘лӢөмңјлЎң кө¬м„ұлҗңлӢӨ. м „нҲ¬мІҙкі„ л¬ҙмһҘ1 WCSм—җм„ң мҡ”мІӯлҗң л©”мӢңм§ҖлҠ” LCMмқҳ л¬ҙмһҘ1 Proxy(201) л°Ҹ WCS Controller(101)лҘј нҶөн•ҳм—¬ Module Controller (102)лЎң м „лӢ¬лҗҳл©°, Module Controller(102)лҠ” мІҳлҰ¬ кІ°кіјлҠ” WCS Controller(101) л°Ҹ л¬ҙмһҘ1 Proxy(201)лҘј кұ°міҗ л¬ҙмһҘ1 WCSлЎң м „мҶЎлҗңлӢӨ. WCSмҷҖмқҳ м—°лҸҷмғҒнғң, мҡҙмҡ©мғҒнғң, Weapon Status, көҗм „мғҒнғң, л°ңмӮ¬мғҒнғң л°Ҹ мӢңк°„ лҸҷкё°нҷ”лҠ” Module Controllerм—җм„ң кҙҖлҰ¬лҗңлӢӨ. л°ңмӮ¬м ңм–ҙкё°м—җм„ң м „нҲ¬мІҙкі„ WCSлЎң м „мҶЎлҗҳлҠ” мғҒнғңм •ліҙм—җлҠ” WCSк°Җ л¬ҙмһҘмқ„ нҶөм ң л°Ҹ кҙҖлҰ¬н• мҲҳ мһҲлҠ” Weapon Status м •ліҙл“Ө, мҰү м—°лҸҷ нғ„м—°лҸҷкё° мҲҳлҹү, нғ„м—°лҸҷкё°лі„ Weapon Type, нғ„м—°лҸҷкё°лі„ нғ„мў…кіј нғ„ мқёлІӨнҶ лҰ¬ м •ліҙк°Җ нҸ¬н•Ёлҗҳм–ҙм•ј н•ңлӢӨ. мӢңк°„лҸҷкё°лҠ” мЈјкё°м ҒмңјлЎң WCSм—җ мҡ”мІӯлҗҳм–ҙ мӢңк°„ лҸҷкё°нҷ”лҘј мң м§Җн•ҳм—¬м•ј н•ңлӢӨ.
TableВ 2.
Combat system WCS interface messages
| л©”мӢңм§Җ к·ёлЈ№лӘ… | л©”мӢңм§Җ кё°лҠҘ | |
|---|---|---|
| 1x |
м—°лҸҷ/мғҒнғңм •ліҙ/мЈјкё°м„ұ м •ліҙмҡ”мІӯ |
|
| мқ‘лӢө | ||
| 2x | көҗм „лӘ…л № | |
| мқ‘лӢө | ||
көҗм „лӘ…л № л°Ҹ мқ‘лӢө 2x к·ёлЈ№мқҖ көҗм „н• лӢ№, л°ңмӮ¬/л°ңмӮ¬мӨ‘м§Җ, көҗм „мӨ‘лӢЁ, көҗм „мў…лЈҢ л°Ҹ 비мғҒнҸӯнҢҢмҷҖ к°ҷмқҖ лӘ…л №кіј мқ‘лӢөмңјлЎң кө¬м„ұлҗңлӢӨ. көҗм „лӘ…л № л°Ҹ мқ‘лӢө м •ліҙмқҳ нқҗлҰ„ м Ҳм°ЁлҠ” 1x к·ёлЈ№кіј лҸҷмқјн•ҳл©°, Module ControllerлҠ” мҲҳмӢ көҗм „н• лӢ№м—җ лҢҖн•ң л¬ҙмһҘлі„ л°ңмӮ¬мұ„л„җмқ„ мғқм„ұн•ҳкі , мұ„л„җлі„ л°ңмӮ¬м Ҳм°Ё мқҙлІӨнҠё м •ліҙ(Data)лҘј мғқм„ұн•ҳм—¬ л¬ҙмһҘ ControllerлЎң м „мҶЎн•ҳм—¬ мқјл Ёмқҳ мң лҸ„нғ„ л°ңмӮ¬м Ҳм°ЁлҘј мҲҳн–үн•ҳкІҢ лҗңлӢӨ.
4.2 л ҲмқҙлҚ” м—…л§ҒнҒ¬ м—°лҸҷ л©”мӢңм§Җ
мң лҸ„нғ„ м—…л§ҒнҒ¬к°Җ н•„мҡ”н•ң л¬ҙмһҘмІҙкі„лҠ” л ҲмқҙлҚ” м—…л§ҒнҒ¬ мҶЎмӢ кё°лЎң Table 3кіј к°ҷмқҖ м—…л§ҒнҒ¬ л©”мӢңм§Җмқҳ мҶЎмӢ мқҙ н•„мҡ”н•ҳлӢӨ. м—°лҸҷ/мғҒнғңм •ліҙ л°Ҹ мқ‘лӢөмқҳ 6xx к·ёлЈ№ л©”мӢңм§ҖлҠ” мһҘ비 к°„мқҳ м—°лҸҷ л§ҒнҒ¬ м—°кІ°/н•ҙм ңмҷҖ мғҒнғңм •ліҙ көҗнҷҳ л©”мӢңм§ҖлЎң кө¬м„ұлҗҳл©°, мҶЎмӢ л©”мӢңм§ҖлҠ” Module Controller(102)м—җм„ң мғқм„ұлҗҳм–ҙ WCS Controller(101)лҘј кұ°міҗ л ҲмқҙлҚ”лЎң м „мҶЎлҗҳл©°, мҲҳмӢ л©”мӢңм§Җ м •ліҙлҠ” м—ӯмңјлЎң м „лӢ¬лҗңлӢӨ.
TableВ 3.
Uplink interface messages
| л©”мӢңм§Җ к·ёлЈ№лӘ… | л©”мӢңм§Җ кё°лҠҘ | |
|---|---|---|
| 6xx | м—°лҸҷ/мғҒнғңм •ліҙ мҡ”мІӯ | |
| мқ‘лӢө | ||
| 7xx | м—…л§ҒнҒ¬ лӘ…л № | |
| мқ‘лӢө | ||
м—…л§ҒнҒ¬ лӘ…л № л°Ҹ мқ‘лӢөмқҳ 7xx к·ёлЈ№ л©”мӢңм§ҖлҠ” м—…л§ҒнҒ¬ л©”мӢңм§Җ мҶЎмӢ кіј мҲҳмӢ мқ‘лӢө л©”мӢңм§ҖлЎң кө¬м„ұлҗҳл©°, мң лҸ„нғ„ л°ңмӮ¬нӣ„ мқҙлІӨнҠё мӢңм җм—җ Module Controller(102)м—җм„ң мғқм„ұлҗҳм–ҙ WCS Controller(101)лҘј кұ°міҗ л ҲмқҙлҚ”лЎң мҶЎмҲҳмӢ лҗңлӢӨ.
4.3 нғ„м—°лҸҷкё°(MIU) м—°лҸҷ л©”мӢңм§Җ
л°ңмӮ¬м ңм–ҙкё°мҷҖ л¬ҙмһҘ нғ„м—°лҸҷкё° к°„мқҳ мҶЎмҲҳмӢ лҗҳлҠ” л©”мӢңм§Җ к·ёлЈ№мқҖ Table 4мҷҖ к°ҷлӢӨ. нғ„м—°лҸҷкё° м—°лҸҷ/мғҒнғңм •ліҙ л°Ҹ мқ‘лӢөмқҳ 1xx к·ёлЈ№ л©”мӢңм§ҖлҠ” Module Controller(102)м—җм„ң мһҗмІҙ мғқм„ұлҗҳм–ҙ MIU Controller(104)мҷҖ MIU proxy(204)лҘј кұ°міҗ нғ„м—°лҸҷкё°лЎң м „мҶЎ/мқ‘лӢөлҗҳл©°, л§ҒнҒ¬ м—°кІ°/н•ҙм ңмҷҖ мғҒнғңм •ліҙ л“ұмңјлЎң кө¬м„ұлҗңлӢӨ. нғ„м—°лҸҷкё° мғҒнғңм •ліҙм—җлҠ” л¬ҙмһҘ кҙҖлҰ¬лҘј мң„н•ң нғ„м—°лҸҷкё° ID, Weapon Type, нғ„м—°лҸҷкё° м—°лҸҷ нғ„мҲҳ, к·ёлҰ¬кі мң лҸ„нғ„ мқёлІӨнҶ лҰ¬к°Җ нҸ¬н•ЁлҗңлӢӨ.
TableВ 4.
MIU interface messages
| л©”мӢңм§Җ к·ёлЈ№лӘ… | л©”мӢңм§Җ кё°лҠҘ | |
|---|---|---|
| 1xx | м—°лҸҷ/мғҒнғңм •ліҙ мҡ”мІӯ | |
| мқ‘лӢө | ||
| 2xx |
MIU лӘ…л № |
|
| мқ‘лӢө | ||
| 3xx |
Cell лӘ…л № |
|
| мқ‘лӢө | ||
нғ„м—°лҸҷкё° лӘ…л №/мқ‘лӢөмқҳ 2xx л©”мӢңм§ҖлҠ” нғ„м—°лҸҷкё° н•ҳл“ңмӣЁм–ҙм—җ мқҳн•ҙ м ңм–ҙлҗҳлҠ” мң лҸ„нғ„ мӢ нҳёл“Өмқҳ м ңм–ҙ лӘ…л № л°Ҹ мқ‘лӢөмңјлЎң кө¬м„ұлҗҳл©°, Module Controller(102)мқҳ л°ңмӮ¬мұ„л„җм—җм„ң мғқм„ұлҗң л°ңмӮ¬ мқҙлІӨнҠё лӘ…л №/мқ‘лӢө Data(мҳҲ, мң лҸ„нғ„ м „мӣҗ ON)лҠ” MIU ControllerмҷҖ MIU proxyлҘј кұ°міҗ нғ„м—°лҸҷкё°лЎң мҶЎмҲҳмӢ лҗңлӢӨ. мқ‘лӢөмқҖ лӘ…л №мқҳ мІҳлҰ¬(мҳҲ, м „мӣҗмқ„ ON н•ҳмҳҖмқҢ)м—җ лҢҖн•ң нҷ•мқёмқҙл©°, лҰҙл Ҳмқҙ л°Ҹ м°©нҷ” лҸҷмһ‘м—җ лҢҖн•ң мқ‘лӢөмқҖ 1xx мғҒнғңм •ліҙ мқ‘лӢөмңјлЎң нҷ•мқён•ҳм—¬м•ј н•ңлӢӨ.
Cell лӘ…л №/мқ‘лӢөмқҳ 3xx л©”мӢңм§ҖлҠ” нғ„м—°лҸҷкё°м—җм„ң мң лҸ„ нғ„мңјлЎң нҸ¬мӣҢл”©лҗҳлҠ” мң лҸ„нғ„мқҳ мІҳлҰ¬/мқ‘лӢөлҗҳлҠ” л©”мӢңм§Җл“Өмқҙл©°, Module Controller(102)мқҳ л°ңмӮ¬мұ„л„җм—җм„ң мғқм„ұлҗң мң лҸ„нғ„ кҙҖл Ё мқҙлІӨнҠё лӘ…л №/мқ‘лӢө Data(мҳҲ, н•ӯлІ•м •ліҙ мһ…л Ҙ)лҠ” Cell Controller(105)мҷҖ MIU proxy(204)лҘј кұ°міҗ нғ„м—°лҸҷкё°лЎң м „мҶЎ/мҲҳмӢ лҗҳл©°, нғ„м—°лҸҷкё°лҠ” мң лҸ„нғ„мңјлЎң л©”мӢңм§ҖлҘј нҸ¬мӣҢл”©/мқ‘лӢөн•ңлӢӨ.
4.4 л°ңмӮ¬лҢҖ(VLS) м—°лҸҷ л©”мӢңм§Җ
л°ңмӮ¬м ңм–ҙкё°мҷҖ л¬ҙмһҘ л°ңмӮ¬лҢҖ(VLS) к°„мқҳ м—°лҸҷ л©”мӢңм§Җ к·ёлЈ№мқҖ Table 5мҷҖ к°ҷлӢӨ. л°ңмӮ¬лҢҖ м—°лҸҷ/мғҒнғңм •ліҙмқҳ 4xx л©”мӢңм§Җл“ӨмқҖ Module Controller(102)м—җм„ң мһҗмІҙ мғқм„ұлҗҳм–ҙ VLS Controller(103)мҷҖ VLS proxy(203)лҘј кұ°міҗ л°ңмӮ¬лҢҖлЎң м „мҶЎ/мқ‘лӢөлҗҳл©°, л§ҒнҒ¬ м—°кІ°/н•ҙм ңмҷҖ мғҒнғңм •ліҙ л©”мӢңм§Җ л“ұмңјлЎң кө¬м„ұлҗңлӢӨ. л°ңмӮ¬лҢҖ мғҒнғңм •ліҙм—җлҠ” л°ңмӮ¬лҢҖ кҙҖлҰ¬лҘј мң„н•ң л°ңмӮ¬лҢҖ ID, л°ңмӮ¬лҢҖ Type, мһҘ비 лҸҷмһ‘мғҒнғң, к·ёлҰ¬кі л°ңмӮ¬лҢҖ кө¬лҸҷмғҒнғң м •ліҙлҘј нҸ¬н•Ён•ңлӢӨ. л°ңмӮ¬лҢҖ лӘ…л №/мқ‘лӢөмқҳ 5xx л©”мӢңм§Җл“ӨмқҖ л°ңмӮ¬лҢҖ кө¬лҸҷ л°Ҹ мҲҳмӢ нҷ•мқё л©”мӢңм§Җл“Өмқҙл©°, Module Controllerм—җм„ң л°ңмӮ¬мұ„л„җ мқҙлІӨнҠё мӢңм җм—җ мғқм„ұлҗҳм–ҙ VLS ControllerмҷҖ VLS proxyлҘј нҶөн•ҳм—¬ л°ңмӮ¬лҢҖлЎң м „мҶЎлҗҳл©°, л°ңмӮ¬лҢҖлҠ” лӘ…л №мқ„ мІҳлҰ¬н•ҳмҳҖмқҢмқ„ мқ‘лӢөн•ңлӢӨ. лӘ…л №м—җ л”°лҘё л°ңмӮ¬лҢҖ кө¬лҸҷмғҒнғңлҠ” л°ңмӮ¬лҢҖ мғҒнғңм • ліҙлЎң мҲҳмӢ лҗңлӢӨ. л§Ңм•Ҫ нғ„м—°лҸҷкё°лҘј кұ°міҗ л°ңмӮ¬лҢҖ м—°лҸҷмқҙ н•„мҡ”н•ң кІҪмҡ° мқҙ л©”мӢңм§Җл“ӨмқҖ нғ„м—°лҸҷкё°лЎң м „мҶЎлҗҳм–ҙм•ј н•ҳл©°, нғ„м—°лҸҷкё° мһҘ비лҠ” мқҙ л©”мӢңм§ҖлҘј л°ңмӮ¬лҢҖмҷҖ мҶЎмҲҳмӢ мІҳлҰ¬лҘј н• мҲҳ мһҲм–ҙм•ј н•ңлӢӨ.
4.5 н•Ём • мһҗмқҙлЎң м—°лҸҷ л©”мӢңм§Җ мІҳлҰ¬
н•Ём • мһҗмқҙлЎң л©”мӢңм§ҖлҠ” л¬ҙмһҘмІҙкі„лЎң мЈјкё°м ҒмңјлЎң мҶЎмӢ л§Ң лҗҳл©°, Table 6кіј к°ҷлӢӨ. Module Controller(102)лҠ” GYRO proxy(205)лЎңл¶Җн„° мЈјкё°м ҒмңјлЎң мҲҳмӢ лҗҳлҠ” мһҗмқҙлЎң н•ӯлІ•м •ліҙлҘј кҙҖлҰ¬н•ҳл©°, н•ӯлІ•м •ліҙлҠ” нғ„м—°лҸҷкё° м—°лҸҷмқҳ Cell лӘ…л № л©”мӢңм§ҖлЎң мҶЎмӢ лҗңлӢӨ.
LCM Controller к°„ м—°лҸҷ м •ліҙ нқҗлҰ„
нҳјн•© л¬ҙмһҘ мҡҙмҡ©мқ„ мң„н•ҳм—¬ л°ңмӮ¬м ңм–ҙкё°м—җм„ң мҷёл¶Җ м—°лҸҷ л©”мӢңм§ҖлҘј мІҳлҰ¬н•ҳкі мҶЎмҲҳмӢ н•ҳлҠ” LCM лӮҙл¶Җ Controller к°„мқҳ Data(м •ліҙ) нқҗлҰ„мқҖ Fig. 9мҷҖ к°ҷмңјл©°, м җм„ мқҖ л§ҒнҒ¬ м—°лҸҷкіј мІҙкі„мһҘ비мғҒнғң, л¬ҙмһҘмғҒнғң л°Ҹ мЈјкё°м„ұ көҗнҷҳ м •ліҙл“Өмқҳ нқҗлҰ„мқ„ лӮҳнғҖлӮҙл©°, мӢӨм„ мқҖ көҗм „/л°ңмӮ¬ м •ліҙл“Өмқҳ нқҗлҰ„мқ„ лӮҳнғҖлӮёлӢӨ. Controller к°„м—җлҠ” м—°лҸҷ кҙҖл Ё Dataк°Җ мҶЎмҲҳмӢ лҗҳл©°(Data ContainerлЎң көҗнҷҳ), ControllerлҠ” м—°лҸҷ Data лЎңл¶Җн„° л©”мӢңм§Җ PayloadлҘј мғқм„ұн•ҳм—¬ мҷёл¶Җ м—°лҸҷ proxyм—җ м „лӢ¬н•ҳл©°, к°Ғ м—°лҸҷ proxyлҠ” Payload(м—°лҸҷ л©”мӢңм§Җ)к°Җ нҸ¬н•Ёлҗң мқҙлҚ”л„· нҢЁнӮ·мқ„ м—°лҸҷ мһҘ비лЎң мҶЎмҲҳмӢ н•ңлӢӨ.
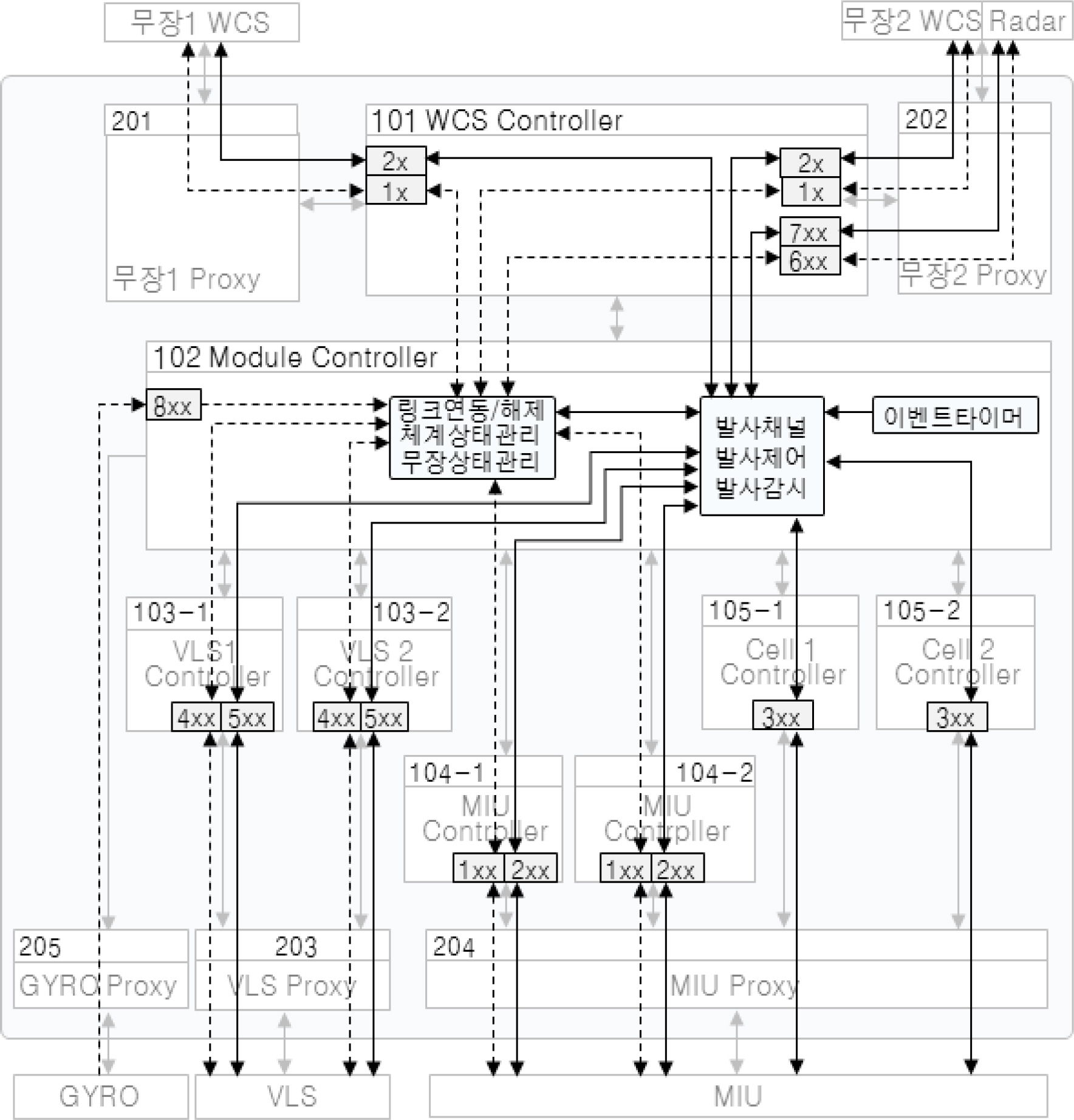
LCMмқҳ н•өмӢ¬ мҶҢн”„нҠёмӣЁм–ҙ лӘЁл“Ҳмқё Module ControllerлҠ” л¬ҙмһҘмІҙкі„мқҳ л§ҒнҒ¬ м—°лҸҷ кҙҖлҰ¬, м—°лҸҷмһҘ비 мғҒнғңкҙҖлҰ¬ л°Ҹ л¬ҙмһҘ мғҒнғңм •ліҙлҘј кҙҖлҰ¬н•ңлӢӨ. лҳҗн•ң м „нҲ¬мІҙкі„ WCSм—җм„ң мҲҳмӢ лҗң көҗм „лӘ…л №м—җ лҢҖн•ң л°ңмӮ¬мұ„л„җмқ„ мғқм„ұн•ҳкі , л°ңмӮ¬ мқҙлІӨнҠё мӢңк°Ғм—җ л°ңмӮ¬м ңм–ҙ лӘ…л № DataлҘј н•ҙлӢ№ ControllerлЎң м „мҶЎн•ҳл©°, л°ңмӮ¬ Safety CheckмҷҖ н•Ёк»ҳ л°ңмӮ¬мғҒнғңлҘј к°җмӢңн•ңлӢӨ.
Fig. 9м—җм„ң VLS ControllerмҷҖ MIU Controller л°Ҹ Cell Controllerк°Җ л‘җ к°ңм”© мғқм„ұлҗң кІғмқҖ л¬ҙмһҘ1кіј л¬ҙмһҘ2мқҳ мң лҸ„нғ„кіј л°ңмӮ¬лҢҖ л°Ҹ нғ„м—°лҸҷкё°мҷҖмқҳ м—°лҸҷ Data нқҗлҰ„мқ„ ліҙм—¬мЈјлҠ” кІғмқҙлӢӨ. мқҙ м•„нӮӨн…ҚмІҳлҠ” ліё л…јл¬ём—җм„ң м ңм•Ҳн•ҳлҠ” н•өмӢ¬мңјлЎң ліөмһЎ л¬ҙмһҘмқҳ нҳёнҷҳ л¬ҙмһҘ мҡҙмҡ©мқ„ к°ҖлҠҘн•ҳкІҢ н•ҳл©°, л°ңмӮ¬м ңм–ҙкё°мқҳ м„Өкі„ мң м—°м„ұ л°Ҹ н–Ҙнӣ„ нҷ•мһҘм„ұмқ„ м ңкіөн•ңлӢӨ.
мӢң뮬л Ҳмқҙм…ҳ л°Ҹ кі м°°
Table 7мқҖ м ңм•Ҳлҗң LCM мҶҢн”„нҠёмӣЁм–ҙмқҳ Controller л°Ҹ Proxy к°„м—җ м—°лҸҷ л©”мӢңм§Җ м •ліҙмқҳ мҶЎмҲҳмӢ кІҪлЎң нқҗлҰ„мқ„ ліҙм—¬мЈјлҠ” мӢң뮬л Ҳмқҙм…ҳ кІ°кіјмқҙл©°, м •ліҙмқҳ нқҗлҰ„мқҙ м ңм•Ҳлҗң кё°лІ•мңјлЎң мІҳлҰ¬лҗҳлҠ” кІғмқ„ ліҙм—¬мӨҖлӢӨ. Table 7м—җм„ң л¬ҙмһҘ м—°лҸҷ л©”мӢңм§Җ лІҲнҳём—җ лҢҖн•ҳм—¬ кІҪмң н•ҳлҠ” Controller лІҲнҳёмҷҖ м¶ңл Ҙ Proxy лІҲнҳёк°Җ м ңм•Ҳлҗң кё°лІ•кіј мқјм№ҳн•ҳлҠ” кІғмқ„ ліҙм—¬мӨҖлӢӨ. мҡҙмҡ© мҙҲкё°м—җ л°ңмӮ¬м ңм–ҙкё°м—җм„ң нғ„м—°лҸҷкё°лЎң м—°лҸҷ мӢңмһ‘мқ„ мҡ”мІӯн•ҳлҠ” 101лІҲ л©”мӢңм§Җ(Table 4мқҳ 1xx л©”мӢңм§Җ)лҠ” Module Controller(102)м—җм„ң мғқм„ұлҗҳл©°, MIU Controller (104-1)мҷҖ MIU Proxy(204)лҘј кұ°міҗм„ң нғ„м—°лҸҷкё°(MIU)лЎң м „мҶЎлҗҳлҠ” кІғмқ„ ліҙм—¬мӨҖлӢӨ. м „нҲ¬мІҙкі„ WCSм—җм„ң көҗм „мқ„ м§ҖмӢңн•ҳлҠ” көҗм „н• лӢ№ 21лІҲ л©”мӢңм§ҖлҠ” WCS Controller(101)лҘј кұ°міҗм„ң Module Controller(102)лЎң м „лӢ¬лҗҳл©°, м—ӯмңјлЎң нҷ•мқё мқ‘лӢөмқ„ м „нҲ¬мІҙкі„ WCSлЎң мҶЎмӢ н•ң нӣ„м—җ л°ңмӮ¬мұ„л„җмқ„ мғқм„ұн•ҳм—¬ мқјл Ёмқҳ мң лҸ„нғ„ л°ңмӮ¬м Ҳм°ЁлҘј мӢңмһ‘н•ҳлҸ„лЎқ н•ңлӢӨ. мң лҸ„нғ„ л°ңмӮ¬м Ҳм°ЁлҠ” мң лҸ„нғ„ м „мӣҗмқ„ мқёк°Җн•ҳкі , мң лҸ„нғ„ BIT(Built In Test)лҘј нҷ•мқён•ҳкі , н•ӯлІ•м •ліҙ л°Ҹ н‘ңм Ғм •ліҙлҘј мһҘмһ…н•ҳкі , мөңмў…м ҒмңјлЎң л°ңмӮ¬мӢңмһ‘мқ„ нғ„м—°лҸҷкё°лЎң м „мҶЎн•ңлӢӨ. 201лІҲ мң лҸ„нғ„ м „мӣҗмқёк°ҖлҠ” Module Controller (102)мҷҖ MIU Controller(104-1, л¬ҙмһҘ1)лҘј нҶөн•ҳм—¬ м¶ңл Ҙ MIU Proxy(204)лЎң м „мҶЎлҗҳм–ҙ нғ„м—°лҸҷкё°лЎң м „мҶЎлҗҳл©°, нғ„м—°лҸҷкё°лҠ” н•ҙлӢ№ мң лҸ„нғ„м—җ м „мӣҗмқ„ кіөкёүн•ң нӣ„м—җ мқ‘лӢөмқ„ м—ӯмңјлЎң м „мҶЎлҗҳкІҢ н•ңлӢӨ. 201лІҲ л©”мӢңм§ҖлҠ” нғ„м—°лҸҷкё°м—җм„ң мң лҸ„нғ„ м „мӣҗмқ„ м¶ңл Ҙн•ҳкі мў…лЈҢлҗҳлҠ” л©”мӢңм§ҖмқҙлӢӨ. кі„мҶҚн•ҳм—¬ LCMмқҖ мң лҸ„нғ„ BITлҘј мҡ”мІӯн•ҳлҠ” 303лІҲ л©”мӢңм§ҖлҘј нғ„м—°лҸҷкё°лЎң мҶЎмӢ н•ҳл©°, 3xxлІҲ л©”мӢңм§ҖлҠ” нғ„м—°лҸҷкё°м—җм„ң мң лҸ„нғ„мңјлЎң нҸ¬мӣҢл”©н•ҳлҠ” л©”мӢңм§ҖмқҙлҜҖлЎң мң лҸ„нғ„мңјлЎң мҶЎмӢ лҗңлӢӨ. мң лҸ„нғ„мқҖ BIT кІ°кіјлҘј мқ‘лӢөн•ҳл©°, нғ„м—°лҸҷкё°лҠ” 303лІҲ мқ‘лӢө л©”мӢңм§ҖлЎң LCMм—җ мқ‘лӢөн•ңлӢӨ. 303лІҲ мқ‘лӢө л©”мӢңм§ҖлҠ” мӢң뮬л Ҳмқҙм…ҳм—җ нҸ¬н•Ён•ҳм§Җ м•Ҡм•ҳлӢӨ. мқҙнӣ„ 301лІҲ н‘ңм Ғм •ліҙ мһҘмһ… л©”мӢңм§ҖмҷҖ 302лІҲ н•ӯлІ•м •ліҙ мһҘмһ… л©”мӢңм§Җк°Җ мң лҸ„нғ„мңјлЎң лҸҷмқјн•ң л©”м№ҙлӢҲмҰҳмңјлЎң мң лҸ„нғ„мңјлЎң мҶЎмӢ л°Ҹ мқ‘лӢөлҗҳкі , мөңмў…м ҒмңјлЎң 204лІҲ л°ңмӮ¬мӢңмһ‘ л©”мӢңм§Җк°Җ Module Controller(102) л°Ҹ MIU Controller(104-1)лҘј кұ°міҗм„ң MIU Proxy(204)лҘј нҶөн•ҳм—¬ нғ„м—°лҸҷкё°лЎң м „мҶЎлҗңлӢӨ. нғ„ м—°лҸҷкё°лҠ” н•ҳл“ңмӣЁм–ҙ мң лҸ„нғ„ м җнҷ”нҡҢлЎңлҘј мҲңм°Ём ҒмңјлЎң м ңм–ҙн•ҳм—¬ мң лҸ„нғ„мқ„ л°ңмӮ¬н•ҳкІҢ лҗңлӢӨ.
TableВ 7.
Simulation results on data flow between controllers
л¬ҙмһҘ1, л¬ҙмһҘ2 л°Ҹ л¬ҙмһҘ3м—җ лҢҖн•ң нҳјн•© м—°лҸҷ мӢңмқҳ м—°лҸҷ л©”мӢңм§Җл“Өмқҳ мҶЎмҲҳмӢ мӢң뮬л Ҳмқҙм…ҳмқҖ н•ҳм§Җ м•Ҡм•ҳм§Җл§Ң л¬ҙмһҘ1 м—°лҸҷ л©”мӢңм§Җмқҳ мӢң뮬л Ҳмқҙм…ҳ кІ°кіјмҷҖ лҸҷмқјн• кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ. к·ёлҹ¬лҜҖлЎң м ңм•Ҳлҗң м•„нӮӨн…ҚмІҳлҠ” нҳјн•© л¬ҙмһҘ нғ‘мһ¬ мӢңм—җлҸ„ н‘ңмӨҖнҷ” л°ңмӮ¬м ңм–ҙкё°лҘј кіөмҡ© н•ҳлӮҳлЎң мӮ¬мҡ©н•ҳкұ°лӮҳ м•һмқҳ Fig. 2м—җ лҸ„мӢңлҗң кІғмІҳлҹј нҳјн•© мҡҙмҡ©мқҙ к°ҖлҠҘн•Ёмқ„ ліҙм—¬мЈјлҠ” кІғмңјлЎң, м ңм•Ҳлҗң л°ңмӮ¬м ңм–ҙкё° м•„нӮӨн…ҚмІҳлҠ” мқҙкё°мў… л°ңмӮ¬лҢҖ л°Ҹ мң лҸ„нғ„мқҳ нҳјн•© мҡҙмҡ©мқҙ к°ҖлҠҘн•ҳкІҢ лҗңлӢӨ.
мӢң뮬л Ҳмқҙм…ҳм—җ м Ғмҡ©лҗң м—°лҸҷ л©”мӢңм§ҖлҠ” мҶЎмҲҳмӢ нқҗлҰ„ кІҖмҰқмқ„ мң„н•ң ID л§Ңмқ„ м Ғмҡ©н•ҳмҳҖкі , л©”мӢңм§Җмқҳ кё°лҠҘм Ғ лӮҙмҡ©мқҖ нҸ¬н•Ён•ҳм§Җ м•Ҡм•ҳлӢӨ. мқҙлҹ° лӮҙмҡ©л“Өмқ„ н–Ҙнӣ„ л¬ҙмһҘмІҙкі„ к°ңл°ң мӢңм—җ кө¬нҳ„лҗҳм–ҙм•ј н•ҳл©°, к°ңл°ң мӢңм—җ 추к°Җм Ғмқё м•Ҳм •м„ұ мӢңн—ҳмқҙ н•„мҡ”н• кІғмңјлЎң мӮ¬лЈҢлҗңлӢӨ.
кІ° лЎ
м ңм•Ҳлҗң н•Ём • лҢҖн•Ё, лҢҖкіө л°Ҹ лҢҖм§Җ л¬ҙмһҘ л°ңмӮ¬м ңм–ҙкё°мқҳ н•ҳл“ңмӣЁм–ҙ л°Ҹ мҶҢн”„нҠёмӣЁм–ҙ м•„нӮӨн…ҚмІҳлҠ” мӢң뮬л Ҳмқҙм…ҳмқ„ нҶөн•ҳм—¬ л¬ҙмһҘ м—°лҸҷ л©”мӢңм§Җ м •ліҙл“Өмқҙ л°ңмӮ¬м ңм–ҙкё°мқҳ LCM лӮҙм—җм„ң мһҳ лҸҷмһ‘н•ҳлҠ” кІғмқ„ мһ…мҰқн•ҳмҳҖлӢӨ. м ңм•Ҳлҗң л°ңмӮ¬м ңм–ҙкё°лҠ” н•Ём •м—җ нғ‘мһ¬лҗҳлҠ” лӢӨмҲҳ л¬ҙмһҘ к°„мқҳ нҳёнҷҳм„ұкіј нҷ•мһҘм„ұмқ„ м ңкіөн•ҳм—¬ мқҙкё°мў… л°ңмӮ¬лҢҖ л°Ҹ мң лҸ„нғ„мқҳ нҳјн•© мҡҙмҡ©мқҙ к°ҖлҠҘн• кІғмңјлЎң мӮ¬лЈҢлҗңлӢӨ. кё°мЎҙ л¬ҙмһҘмІҙкі„лҠ” л¬ҙмһҘлі„ л°ңмӮ¬м ңм–ҙкё°мҷҖ к°ңлі„ н• лӢ№лҗң л°ңмӮ¬лҢҖ л°Ҹ мң лҸ„нғ„мқ„ мӮ¬мҡ©н•ҙм•ј н•ҳлҜҖлЎң л¬ҙмһҘк°„мқҳ ліҖкІҪмқҙлӮҳ нҷ•мһҘмқҙ л¶Ҳк°ҖлҠҘн•ҳм§Җл§Ң, м ңм•Ҳлҗң л°©лІ•мқҖ л¬ҙмһҘ кө¬м„ұ ліҖкІҪмқҙлӮҳ нҷ•мһҘм„ұм—җ л§Өмҡ° мң лҰ¬н•ҳл©°, н•ҳлӮҳмқҳ л°ңмӮ¬м ңм–ҙкё°к°Җ лӢӨмҲҳмқҳ л¬ҙмһҘмқ„ нҳјн•© мҡҙмҡ©н•ҳлҠ” кІғлҸ„ к°ҖлҠҘн•ҳлӢӨ. л”°лқјм„ң н–Ҙнӣ„ н•Ём • нғ‘мһ¬мҡ© л¬ҙмһҘмІҙкі„м—җ м ңм•Ҳлҗң кё°лІ•мқ„ м Ғк·№м ҒмңјлЎң м Ғмҡ©мқҙ н•„мҡ”н•ҳлӢӨкі мӮ¬лЈҢлҗҳл©°, н‘ңмӨҖнҷ”лЎң м ңмӢңлҗң л„ӨнҠёмӣҢнҒ¬мҷҖ м—°лҸҷ л©”мӢңм§Җ м„Өкі„ л°Ҹ LCM мҶҢн”„нҠёмӣЁм–ҙмқҳ нҷңмҡ©мқҙ н•„мҲҳм Ғмқҙлқјкі мӮ¬лЈҢлҗңлӢӨ. н–Ҙнӣ„ н•Ём • нғ‘мһ¬ л¬ҙмһҘмІҙкі„мқҳ к°ңл°ң мӢңм—җ м ңм•Ҳлҗң кё°лІ•мқ„ м Ғмҡ©н•ң л°ңмӮ¬м ңм–ҙкё°мқҳ м „мІҙ мҶҢн”„нҠёмӣЁм–ҙлҘј к°ңл°ңн•ҳм—¬ 추к°Җм Ғмқё мҶҢн”„нҠёмӣЁм–ҙмқҳ м•Ҳм •м„ұкіј мӢ лў°м„ұм—җ лҢҖн•ң кІҖмҰқмқҙ мҡ”кө¬лҗңлӢӨ.




