2차원 위상비교 방향탐지를 위한 수신기 설계 및 제작
Design and Fabrication of 2-Dimensional Direction Finding Receiver Using Phase Comparison
Article information
Abstract
In this paper, a 2-dimensional phase comparison direction finding receiver was designed and fabricated. For 2-D comparison direction finding, direction finding formulas were derived from a uniformly arranged of four antennas. Based on this, a direction finding receiver was designed using Matlab simulink, and the direction finding receiver was fabricated. To analyze the performance of the designed direction finding receiver, the injection direction finding accuracy and simulation results were compared. As a result of the test, the fabricated direction finding receiver showed a maximum of 3° RMS precision, and the result of both tests showed similar trends. Also, it was confirmed that the direction finding accuracy of elevation angle is about 2.7 times better than azimuth angle, and both models performed well within 0.7° RMS at the boresight.
1. 서 론
전자전(Electronic Warfare) 분야에서 방향탐지(Direction Finding) 기술은 전자전 체계를 구성하는 전자전지원(Electronic Warfare Support) 장비의 핵심 기술로 크게 수동형 방향탐지 방식과 능동형 방향탐지 방식으로 나뉜다. 능동형 방향탐지 방식은 레이더와 같이 신호를 송신하여 목표물에 맞고 반사되는 신호를 수신하여 방향을 탐지하는 방식이다[1,2].
반면, 수동형 방향탐지 방식은 탐지 대상의 신호원을 수신하여 방향을 탐지하는 방식이다. 수동형 방향 탐지는 전파의 송신 없이 수신하는 특성으로 인해 상대의 경보장치에 탐지되지 않는 장점이 있다. 또한, 소모 전력이 능동형 방향탐지 방식에 비해 적고, 하드웨어를 상대적으로 소형화 할 수 있다. 하지만 탐지 대상 신호원의 송신이 중단되었을 경우, 대상을 탐지할 수 없는 단점이 존재한다[1,2].
수동형 방향탐지 방식의 경우 방향탐지 기법은 진폭 비교 방향탐지, 위상비교 방향탐지 방식, 모노펄스 합/차 방식 등 여러 방식으로 나뉜다[1]. 이중 위상비교 방향 탐지 방식은 하나의 베이스라인에 배치된 두 개 안테나에 수신된 신호의 위상차를 이용한 AOA(Angle of Arrival) 기법을 이용하여 방향 탐지를 수행하는 방식으로 이는 짧은 시간에 방향탐지가 가능하고, 방향 탐지 정확도가 우수하여 널리 이용되고 있다[3].
기존의 위상비교 방향탐지 연구는 주로 방위각만 탐지한 1차원 방향탐지가 수행되었다[4,5]. 하지만 현대의 방향탐지에서는 방위각, 고각을 모두 탐지하는 2차원 방향탐지를 요구하고, 소형화, 저전력, 저비용을 요구한다[2]. 따라서, 목표 방향탐지 정확도를 만족하면서 구조를 단순하게 하는 과정이 요구된다[6]. 이를 위해서는 설계 과정에서 방향탐지 정확도를 계산할 수 있어야 한다.
본 논문에서는 소형, 저전력 특성을 갖는 2차원 위상비교 방향탐지 수신기를 설계하고 제작하였다. 2장에서는 2차원 위상비교 방향탐지 수신기 설계를 위해 4개의 안테나를 균일하게 배치한 구조에서 2차원 방향탐지 수식을 도출하였다. 3장에서는 도출된 수식을 기반으로 방향탐지 수신기를 설계 및 제작하였고, 제작된 방향탐지 수신기에 대해 위상차 보정 방법 및 정확도 측정방법을 제안하였다. 4장에서는 설계된 방향탐지 수신기의 성능을 분석하기 위해 시뮬레이션 모델의 방향탐지 정확도와 제작된 방향탐지 수신기의 주입 방향탐지 정확도를 비교, 분석하였으며, 5장에서 결론을 도출하였다.
2. 2차원 위상비교 방향탐지
본 장에서는 일반적인 1차원 방향탐지 이론을 기술한 뒤, 2차원 방향탐지를 위해 4개의 안테나를 균일하게 배치한 구조에서 2차원 위상비교 방향탐지 수식을 도출한다.
2.1 위상비교 방향탐지 모델
신호원이 위치한 방향의 각도 정보인 AOA를 얻기 위해서는 2개 이상의 배열 안테나를 사용해야 하며, 각 안테나 요소로부터 얻은 신호의 위상차를 이용하면 신호원의 방향을 추정할 수 있다[7,8]. 신호원이 방향탐지 안테나에서 평면파라고 볼 수 있을 정도로 안테나와 신호원이 충분히 떨어져 있다고 가정할 때, 방향탐지 안테나로부터 신호원의 AOA를 얻을 수 있는 가장 간단한 형태의 구조는 2개의 안테나를 사용한 Fig. 1과 같다[9].
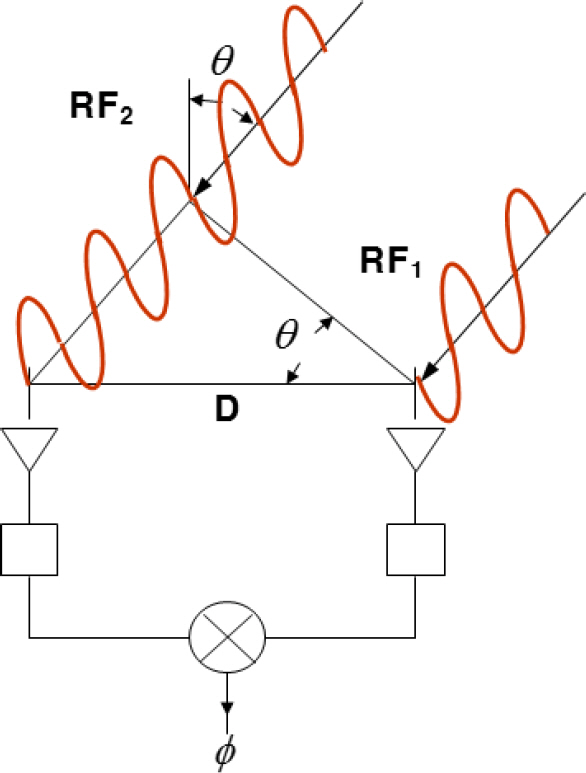
Phase comparison direction finding diagram with one baseline
두 안테나간 거리를 베이스라인 길이(D)라고 하면, 식 (1)과 같이 RF 1채널에 입력된 신호는 RF 2채널에 입력된 신호와 위상차(ϕ)가 발생하는 것을 알 수 있다.
위상차는 식 (2)와 같이 표현되며, 두 RF 채널 간 입력된 신호의 위상차를 산출하여 입사 신호원의 방향(θ)를 추정할 수 있다.
여기서 λ는 파장,
2.2 2차원 위상비교 방향탐지 모델
탐지대상의 방위각, 고각을 추정하는 2차원 위상비교 방향탐지를 위한 구조는 Fig. 2와 같다. 이는 소형 특성을 만족하고, 방위각, 고각 베이스라인을 보유하기 위해 안테나 4개를 균일 배치한 간단한 구조이다. 신호원은 구좌표계의
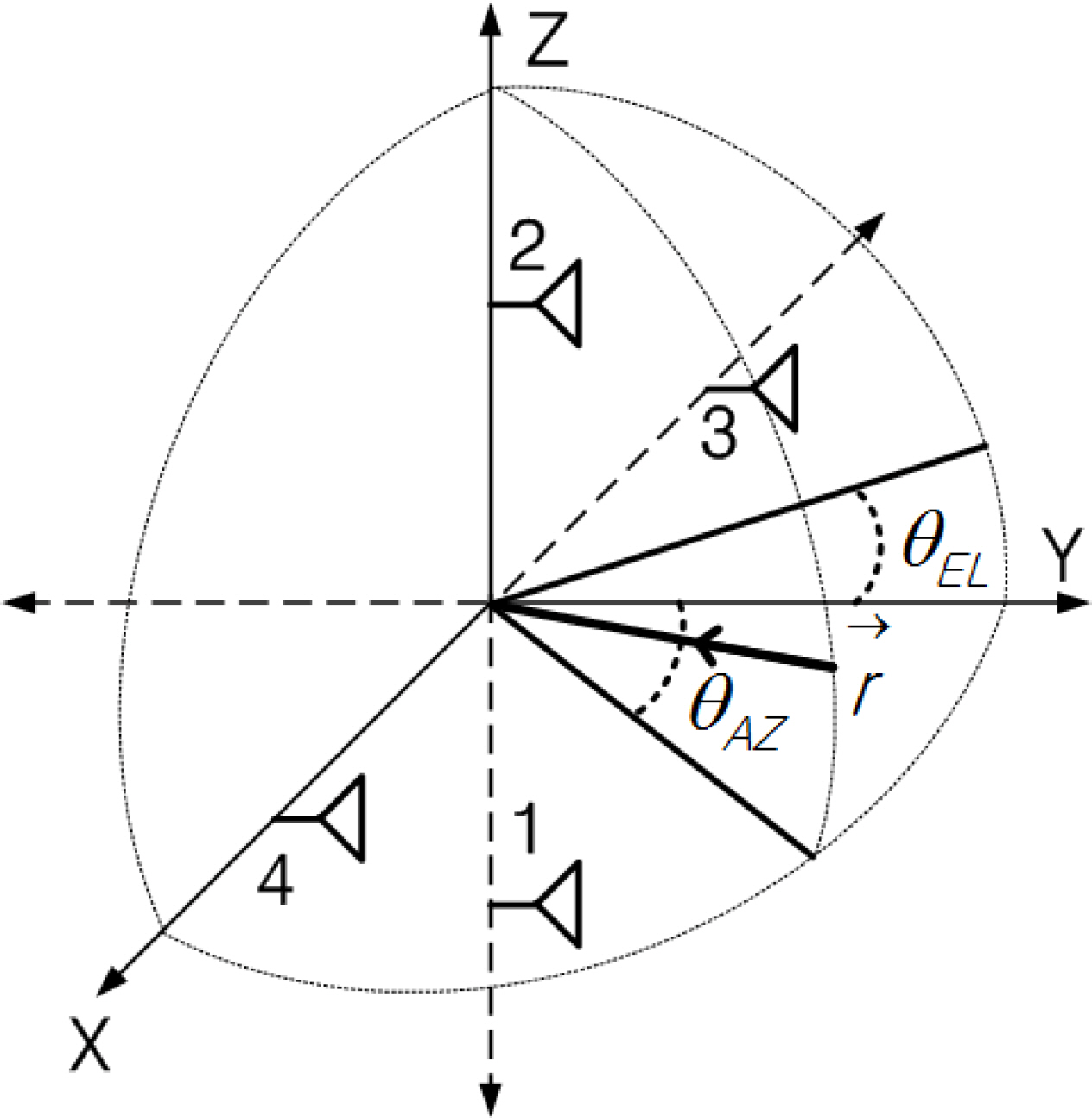
Uniform array antenna using four elements
식에서 β는 위상상수(rad/m),
식 (5)와 (6)을 연립하여 정리하면 식 (7), (8)과 같이 방위각과 고각을 구할 수 있다.
식 (7), (8)의 결과로 고각은 방위각에 독립적이지만, 방위각은 고각에 종속적임을 알 수 있다.
3. 2차원 위상비교 방향탐지 장치
본 장에서는 2장에서 도출한 수식을 기반으로 Matlab Simulink를 이용하여 2차원 위상비교 방향탐지 수신기를 설계하였고, 이를 기반으로 방향탐지 수신기를 제작하였다. 제작 시 4개의 RF 채널의 위상차 보정을 위해 채널간 위상차 보정 방법을 제안하였고, 주입 방향탐지 성능을 측정하기 위한 시험 방법을 설명한다.
3.1 2차원 위상비교 방향탐지 수신기설계
Fig. 3은 Matlab Simulink를 이용하여 설계된 2차원 위상비교 방향탐지 수신기를 나타낸다. 설계된 방향탐지 수신기는 신호원 생성부, 위상차 계산부, 정확도 산출부로 구성된다.
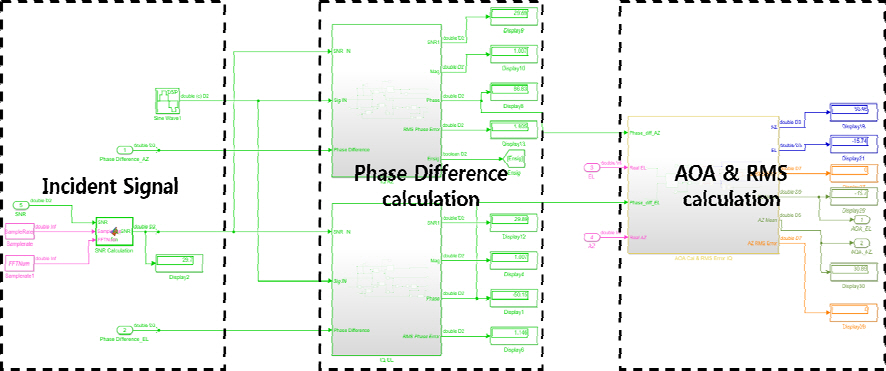
Direction finding simulation diagram
신호원 생성부는 방향탐지 수신기에 입력되는 4채널의 신호를 모의하고, 위상차 계산부는 2.2 절에서 도출한 수식을 기반으로 신호원 생성부에서 입력받은 신호의 위상차를 계산한다. 정확도 산출부는 위상차 계산부의 결과를 바탕으로 상대 방위각과 고각을 산출하고, 방향탐지 정확도를 산출하기 위해 방향탐지 오차의 RMS(Root Mean Squares)를 출력한다. 시뮬레이션이 실제 모델과 비슷한 의미를 가지도록 잡음 모델은 가우시안 잡음 모델을 적용하였다[7,8].
3.2 2차원 위상비교 방향탐지 수신기 제작
시뮬레이션 모델을 기반으로 실제 제작된 방향탐지 수신기의 구성도는 Fig. 4와 같고, 실제 제작된 수신기는 Fig. 5와 같다. 제작된 수신기는 18 × 13 cm 사이즈로 총 3개의 모듈로 구성되어있다. Fig. 5의 위는 ADC 수신부이고, Fig. 5의 아래는 디지털 신호처리부이다. 소형, 저전력의 특성을 만족시키기 위해 직접 RF(Radio Frequency) 표본화 기반 수신기로 설계하였다[9]. 제작된 방향탐지 수신기는 4개의 RF 신호를 2개의 2채널 ADC(Analog to Digital Converter)로 입력받아 디지털 신호로 변환하고, FPGA(Field Programmable Gate Array)를 거쳐 위상차를 산출하여 고각과 방위각 정보를 추출한 후 이를 CPU(Central Processing Unit)를 통해 외부 인터페이스에 데이터를 전달하는 구조이다. 고속 처리 및 소형화를 위해 FPGA는 다른 제품에 비해 비교적 게이트 수가 많고, CPU가 내장되어있는 Xilinx사의 Zynq-XC7Z100을 사용하였다[10].
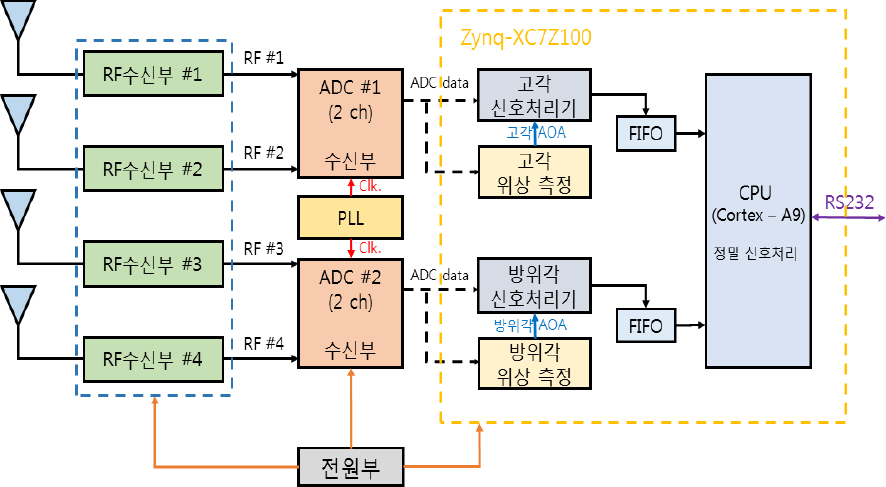
Configuration diagram of 2-dimensional direction finding receiver
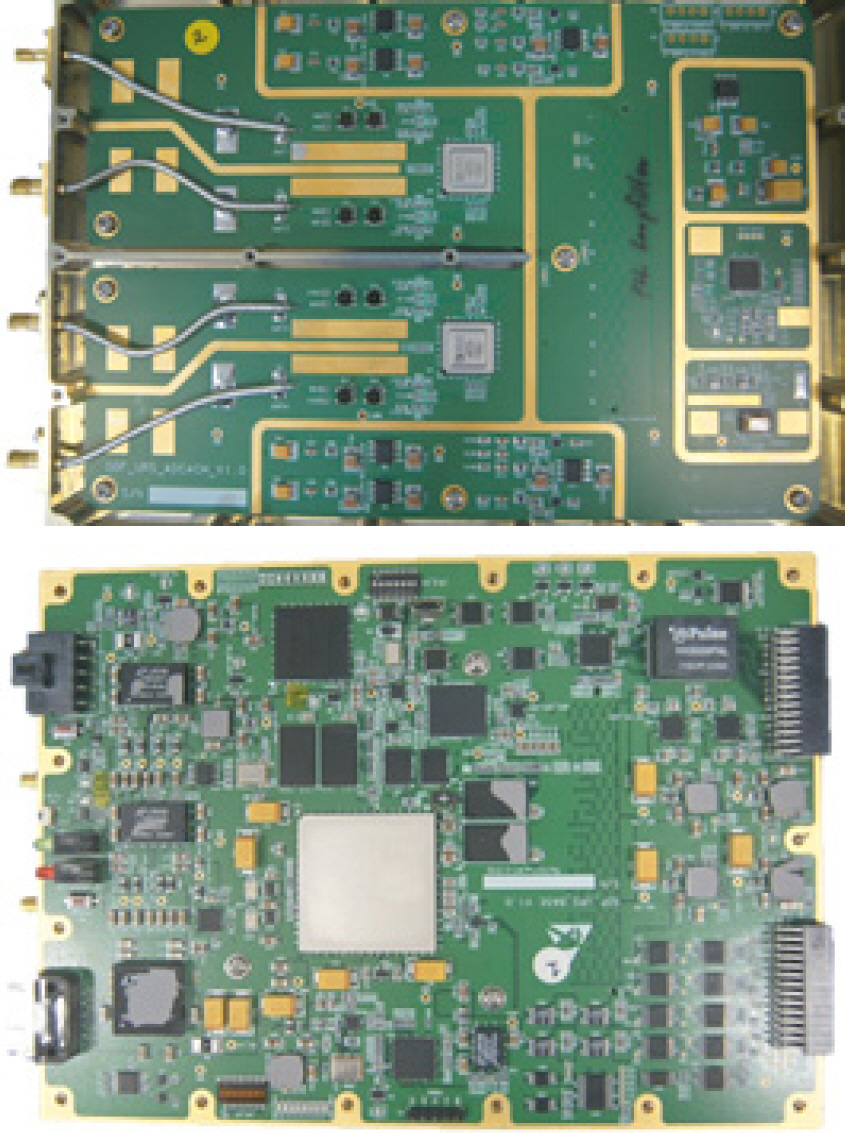
Manufactured direction finding receiver(Top: ADC receiving part, Bottom: digital signal processing part)
3.3 채널간 위상차 보정
위상비교 방향탐지 수신기 제작시 채널간 위상차 및 진폭차 등 전기적 성능은 제작 공정상 오차 및 부품의 특성으로 인해 이론적인 위상차 분포와 실제 위상차 분포의 차이가 발생하며, 이로 인해 각 채널 간 위상 부정합이 발생한다[1,11]. RF 입력단의 위상차를 보정하게 되면 정확한 방향탐지 정확도 성능을 구현할 수 있으며 이를 채널 보정이라고 한다[12].
본 논문에서 제안하는 채널 보정 및 방향탐지 방법은 다음과 같다. 채널 보정을 위해 기준용 계측장비에서 4채널 출력 신호를 동일하게 생성하여 이를 RF 입력단에 연결 후 RF 방향탐지 수신기의 채널간 위상차를 측정한다. 이때의 위상차는 ADC 입력단 전 RF 경로의 위상차이다. 측정한 채널간 위상차와 식 (5), (6)을 이용하여 주파수, 방위각, 고각에 따른 Table 1과 같은 형태의 주입보정 테이블을 생성한다. 이후 이를 방향탐지 수신기에 장입하면 방향탐지 수신기는 보정테이블을 참고하여 현재 측정된 위상차와 테이블 상 위상차의 최소 거리(Minimum Distance)를 산출하여 방향탐지를 수행하므로 정확한 방향탐지가 가능하다.

Consist of injection compensation table
3.4 주입 방향탐지 성능 측정
제작된 방향탐지 수신기의 주입 방향탐지 정확도 산출을 위해서는 기준용 신호발생 장비가 필요하다. Fig. 6은 기준용 신호발생 장비를 이용하여 제작된 방향탐지 수신기의 주입 방향탐지 정확도 측정을 위한 시험 구성도를 나타낸다. 기준용 신호 발생기에서 4채널의 위상차 데이터를 생성하여 이를 방향탐지 수신기에 연결하면 방향탐지 수신기에서 RS-232 시리얼 인터페이스를 통해 수신된 신호의 정보 메시지를 PC 로 전송한다. 시험에 사용된 기준용 신호발생 장비의 성능은 Table 2와 같다.
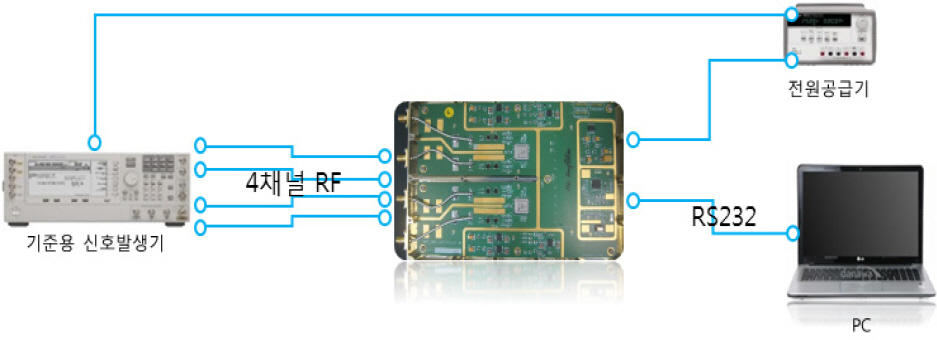
Injection direction finding test configuration diagram
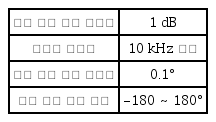
Performance of reference signal generator
4. 2차원 위상비교 방향탐지 성능 분석
본 장에서는 시뮬레이션 모델의 방향탐지 수신기와 제작된 방향탐지 수신기의 성능을 비교 분석한다. 두 모델을 직접적으로 비교하기 위해 제작 모델의 주입 방향탐지 정확도와 시뮬레이션 모델의 방향탐지 정확도를 비교하였다. 방향탐지 정확도 분석을 위해 방향탐지 오차의 RMS를 서로 비교 분석하였다.
시뮬레이션 모델의 방위각, 고각의 방향탐지 정확도는 Fig. 7과 같고, 제작된 방향탐지 수신기의 주입 방향탐지 정확도는 Fig. 8과 같다. 이때, 입력 신호의 SNR(Signal to Noise Ratio)은 20 dB를 적용하였다[2]. 방향탐지 장치의 탐지 범위인 FOV(Field of View)는 −50°∼50°로 설정하였다.
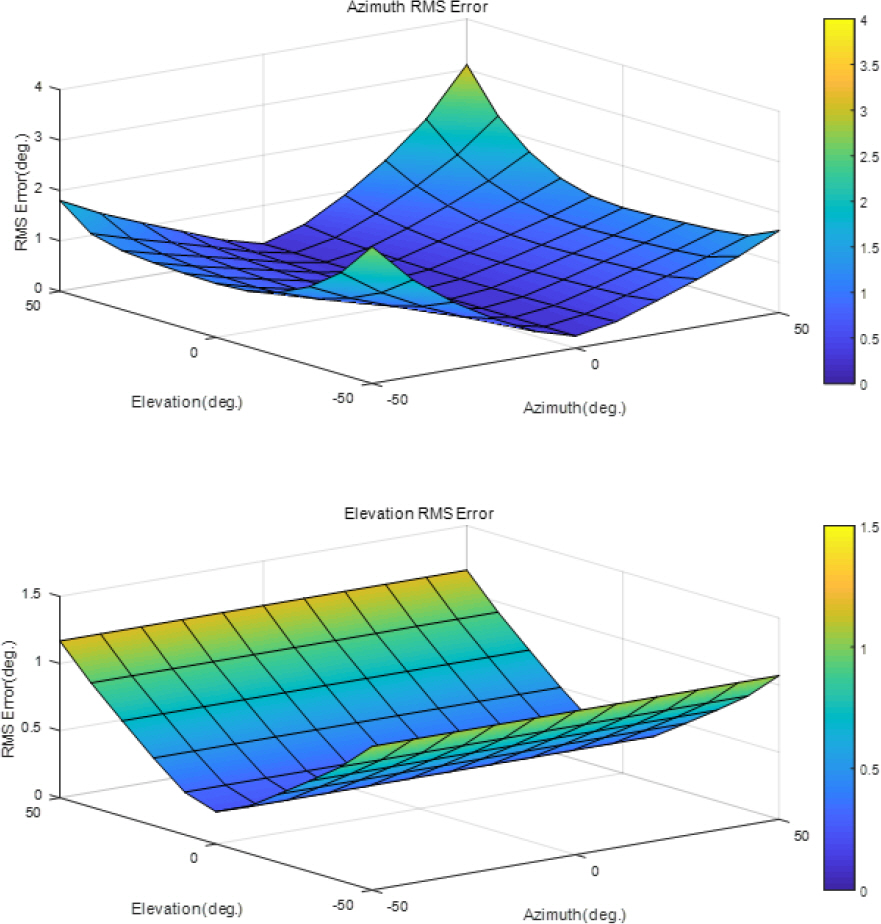
RMS error of simulation model

RMS error of fabricated direction finding receiver
시험결과 두 모델 모두 전체적인 경향성은 서로 비슷함을 확인하였다. 방위각 오차가 고각의 오차보다 상대적으로 크게 발생하였고, 방위각, 고각의 오차 모두 FOV의 끝단으로 갈수록 방향탐지 오차가 커지는 경향을 확인할 수 있다.
고각 방향탐지 오차의 경우, 방위각이 변할 때 방향탐지 오차가 변하지 않고, 고각이 변할 때 오차가 변하는 것을 확인할 수 있다. 이는 식 (7), (8)의 결과로 확인한 바와 같이 고각 오차는 방위각에 종속적이지 않아 방위각 변화에 따른 방향탐지 오차의 변화가 없지만, 방위각 오차는 고각에 종속적이므로 고각 변화에 따라 방위각의 오차도 같이 영향을 받기 때문이다.
탐지범위의 중심부인 보어사이트(Boresight)에서 시뮬레이션 모델의 최대 오차는 방위각 0.23° RMS, 고각 0.36° RMS이고, 제작 모델 최대 오차는 방위각 0.7° RMS, 고각 0.54° RMS이다. 제작 모델보다 시뮬레이션 모델이 방위각은 약 3.05배, 고각은 약 1.5배 우수함을 보였다. 이는 채널 보정 오차로 인한 영향이다. 채널 보정 오차는 채널 보정시 케이블의 체결 상태 및 온도 변화 등 시험 구성 변화로 인해 발생한 위상측정 오차이다. 이로 인해 측정된 채널 보정 데이터를 이용하여 주입 보정 테이블 생성시 위상 측정 오차가 포함되므로 방향탐지 결과에 영향을 미친다. 반면, 최대 오차의 경우 두 시험결과는 방위각과 고각 모두 근사함을 확인하였다.
5. 결 론
본 논문에서는 탐지 대상의 상대 방위각과 고각 추정을 위해 2차원 위상비교 방향탐지 수신기를 설계 및 제작하였다. 방향탐지 수신기 설계를 위해 위상비교 방향탐지 이론을 정리하였고, 이를 기반으로 2차원 위상비교 방향탐지 수식을 도출하였다. 도출한 수식을 기반으로 Simulink를 이용하여 시뮬레이션 기반의 방향탐지 수신기를 설계 후 제작하였다. 또한 방향탐지 수신기 제작 시 위상차 보정을 위해 채널보정, 주입보정 및 측정 방법을 제안하였다.
설계된 방향탐지 수신기의 성능을 분석하기 위해 시뮬레이션 모델의 방향탐지 정확도와 제작된 방향탐지 수신기의 주입 방향탐지 정확도를 서로 비교 분석하였다. 실험결과 두 모델 모두 비슷한 양상의 결과를 확인할 수 있었고, 방위각은 약 3.5° RMS 이내, 고각은 약 1.3° RMS 이내의 성능을 보였다. 또한 탐지범위의 중심부는 방위각, 고각 모두 약 0.7° RMS 이내의 우수한 방탐 정확도 성능을 갖는 2차원 위상비교 방향탐지 수신기 제작이 가능함을 보였다. 베이스라인별로 2개의 채널을 사용하기 때문에 기존의 ESM(Electronic Support Measure) 장비 대비 방향탐지 성능이 떨어지지만, 탐지범위 중심부는 기존과 비슷한 성능을 보였다. 따라서 본 논문에서 제안하는 방법을 적용하면 탐지범위 중심부에서 고정밀의 방향탐지 성능을 요구하는 소형 플랫폼 체계에 적용할 수 있고, 소형화, 저비용의 특성을 만족하는 다양한 플랫폼에 탑재 가능한 우수한 성능의 2차원 위상비교 방향탐지 수신기 제작이 가능하다.