



м„ң лЎ
В
1.1 м—°кө¬л°°кІҪ л°Ҹ лӘ©м Ғ
UHF(Ultra High Frequency)л¬ҙм „кё°мқҳ мЈјнҢҢмҲҳ лҸ„м•Ҫ(Frequency Hopping)л°©мӢқмқё HQ(Have Quick)мқҖ көҗмӢ м—җ мӮ¬мҡ©н•ҳлҠ” мЈјнҢҢмҲҳлҘј н•ҙлӢ№ л¬ҙм „кё°м—җм„ң мҡҙмҡ©к°ҖлҠҘн•ң мЈјнҢҢмҲҳ лӮҙм—җм„ң мҲҳмӢңлЎң ліҖкІҪн•ҙк°Җл©ҙм„ң көҗмӢ н•ҳкё° л•Ңл¬ём—җ к°җмІӯ л°Ҹ көҗлһҖмқ„ мң„н•ҙм„ңлҠ” көҗмӢ мЈјнҢҢмҲҳлҘј кі„мҶҚ 추м Ғн•ҙм•ј н•ҳлҠ” кё°мҲ м Ғ м–ҙл ӨмӣҖмқҙ мһҲм—ҲлӢӨ. н•ҳм§Җл§Ң мЈјнҢҢмҲҳ 추м Ғ кё°мҲ мқҙ л°ңм „н•Ём—җ л”°лқј кё°мЎҙ HQ л¬ҙм „кё°мқҳ мЈјнҢҢмҲҳ лҸ„м•Ҫ л°©мӢқмңјлЎңлҠ” мҷ„лІҪн•ң лҢҖмқ‘мқҙ м ңн•ңлҗҳлҠ” мӮ¬н•ӯмқҙлӢӨ. мқҙм—җ лҜёкөӯм—җм„ң к°ңл°ңлҗҳм–ҙ NATOк°Җ мӮ¬мҡ©н•ҳкі мһҲлҠ” SATURN (Second Generation Anti jam Tactical UHF Radio for NATO) л¬ҙм „кё°лЎңмқҳ м„ұлҠҘк°ңлҹүм—җ лҢҖн•ң кІҖнҶ к°Җ 진н–үлҗҳкі мһҲлӢӨ[1].
STANAG 4372м—җ м •мқҳлҗң SATURN кё°лҠҘмңјлЎң мҡҙмҡ© к°ҖлҠҘн•ң кіөм§ҖнҶөмӢ л¬ҙм „кё°лҠ” HQ в…ЎмҷҖ лҸҷмқјн•ҳкІҢ мЈјнҢҢмҲҳлҸ„м•Ҫ л°©мӢқмқ„ мӮ¬мҡ©н•ҳлӮҳ, мЈјнҢҢмҲҳ лҸ„м•Ҫмқ„ м•„лӮ лЎңк·ём—җм„ң л””м§Җн„ё л°©мӢқмңјлЎң л°”кҝҲм—җ л”°лқј лҚ°мқҙн„° ліҖмЎ° л°©мӢқ л°Ҹ мЈјнҢҢмҲҳ лҸ„м•Ҫ мҶҚлҸ„лҘј мҰқк°ҖмӢңмјң к°җмІӯ л°Ҹ көҗлһҖм—җ лҢҖн•ң ліҙм•Ҳкё°лҠҘ л°Ҹ н•ӯмһ¬л°Қ лҠҘл Ҙмқ„ 비м•Ҫм ҒмңјлЎң л°ңм „мӢңмј°лӢӨ.
н•ҳм§Җл§Ң мЈјнҢҢмҲҳ лҸ„м•Ҫ л°©мӢқмқ„ мӮ¬мҡ©н•ҳлҠ” л¬ҙм „кё°лЎң көҗмӢ н•ҳкё° мң„н•ҙм„ңлҠ” лҸҷмқјн•ң мӢңк°„м •ліҙлЎң көҗмӢ лҢҖмғҒл“Ө к°„мқҳ лҸҷкё°мғҒнғңлҘј мң м§Җн•ҳкі мӮ¬м „м—җ м•ҪмҶҚлҗң м•”нҳёнҷ”лҗң лҸ„м•Ҫ нҢЁн„ҙмңјлЎң мЈјнҢҢмҲҳлҘј ліҖкІҪн•ҳм—¬м•ј н•ңлӢӨ. л§Ңм•Ҫ көҗмӢ лҢҖмғҒл“Ө к°„мқҳ лҸ„м•Ҫ мӢңк°„кіј лҸ„м•Ҫ мЈјнҢҢмҲҳк°Җ мқјм№ҳ н•ҳм§Җ м•Ҡмңјл©ҙ көҗмӢ мқҙ л¶Ҳк°ҖлҠҘн•ҳкІҢ лҗңлӢӨ. мқҙлҹ¬н•ң л¬ём ңм җмқ„ н•ҙкІ°н•ҳкё° мң„н•ҳм—¬ көҗмӢ мқ„ мЈјкі л°ӣлҠ” ліөмҲҳмқҳ л¬ҙм „кё°мқҳ мӢңк°„ лҸҷкё°нҷ”лҘј мң„н•ҙ SATURN л¬ҙм „кё°м—җ мһ…л Ҙн•ҳлҠ” мӢңк°„м •ліҙк°Җ TOD(Time Of Day)мқҙлӢӨ.
TODлҠ” UTC(нҳ‘м •м„ёкі„мӢң)лҘј кё°мӨҖмңјлЎң н•ҳл©°, SATURN л¬ҙм „кё°м—җ мһ…л Ҙн•ҳлҠ” л°©лІ•м—җлҠ” 1) GPS(Global Positioning System, мң„м„ұн•ӯлІ•мӢңмҠӨн…ң) мҲҳмӢ кё°лЎңл¶Җн„° м—°мӮ°лҗң UTC мӢңк°„м •ліҙлҘј SATURN л¬ҙм „кё°м—җ м—°лҸҷ лҳҗлҠ” GPS мӢ нҳёлҘј SATURN л¬ҙм „кё°м—җ м§Ғм ‘ мһ…л Ҙн•ҳм—¬ SATURN л¬ҙм „кё° лӮҙл¶Җм—җм„ң TOD лҸ„м¶ң, 2) 비н–ү м „ мҲҳлҸҷмңјлЎң мһ…л Ҙ, 3) мӨ‘кі„кё° лҳҗлҠ” нғҖ н•ӯкіөкё°м—җм„ң TOD м •ліҙлҘј мҲҳмӢ л“ұмқҙ мһҲлӢӨ. мӨ‘кі„кё°м—җм„ң TOD м •ліҙлҘј мҲҳмӢ н•ҳлҠ” л°©лІ•мқҖ нҳ„мһ¬ HQмқ„ мҡҙмҡ©н•ҳлҠ” мЈјмҡ” л°©лІ•мқҙл©° мҲҳлҸҷ мһҘмһ…м—җ 비н•ҙ нҡЁмңЁм ҒмқҙлӢӨ. н•ҳм§Җл§Ң 1)TOD мӨ‘кі„кё°к°Җ л¬ҙл Ҙнҷ”лҗҳкұ°лӮҳ, 2) мӨ‘кі„кё°мқҳ м „нҢҢмҶЎмӢ лІ”мң„ л°–мқҙкұ°лӮҳ 3) мӨ‘кі„кё°м—җм„ң м—°мӮ°н•ң TOD м •ліҙмқҳ мҳӨм°Ёк°Җ мҡҙмҡ© лІ”мң„лҘј лІ—м–ҙлӮ кІҪмҡ° мЈјнҢҢмҲҳ лҸ„м•Ҫ көҗмӢ мқҙ м ңн•ңлҗңлӢӨ[2]. л°ҳл©ҙ л¬ҙм „кё°м—җ GPSлҘј м—°лҸҷн•ҳлҠ” л°©лІ•мқҖ м§Җкө¬ м „мІҙм—җ мҶЎмӢ лҗҳлҠ” GPSмӢ нҳёлҘј мҲҳмӢ н•ҳм—¬ м–ҙл””м„ңлӮҳ TOD м •ліҙлҘј мғқм„ұн•ҳм—¬ мӮ¬мҡ©н• мҲҳ мһҲлӢӨлҠ” мһҘм җмқҙ мһҲлӢӨ. лҳҗн•ң н•ӯкіөкё°м—җм„ң GPSлҘј нҶөн•ҳм—¬ TOD м •ліҙлҘј м—°мӮ°н•ң нӣ„ нғҖ н•ӯкіөкё°м—җ TODлҘј мӨ‘кі„н• мҲҳ мһҲкІҢ лҗЁм—җ л”°лқј к°ңлі„ н•ӯкіөкё°к°Җ мӨ‘кі„кё°мҷҖ к°ҷмқҖ м—ӯн• мқ„ мҲҳн–үн• мҲҳ мһҲлӢӨ.
1.2 м—°кө¬лІ”мң„ л°Ҹ л°©лІ•
ліё л…јл¬ём—җм„ңлҠ” кіөм§ҖнҶөмӢ л¬ҙм „кё° м„ұлҠҘк°ңлҹүмқ„ мң„н•ң мһҗлҸҷ TOD м—°лҸҷл°©м•Ҳм—җ лҢҖн•ҳм—¬ м ңм•Ҳн•ҳмҳҖлӢӨ. GPSмӢ нҳёлҘј нҷңмҡ©н•ҳм—¬ SATURN л¬ҙм „кё°м—җ TODлҘј м—°лҸҷн•ҳкё° мң„н•ҙ лӢӨм–‘н•ң мў…лҘҳмқҳ л Ҳкұ°мӢң н•ӯкіөкё°м—җ мһҘм°©лҗҳм–ҙ мһҲлҠ” L1 Band GPSм•Ҳн…ҢлӮҳлҘј MOPS(Minimum Operational Performance Standard, мөңмҶҢ мҡҙмҡ© м„ұлҠҘ к·ңкІ©)м—җ л§һкІҢ к°ңмЎ°н•ҳкё° мң„н•ң мқҙлЎ м Ғ л°°кІҪмқ„ нҷ•мқён•ҳкі к·ём—җ л§һлҠ” м„Өкі„м•Ҳмқ„ м ңмӢңн•ҳмҳҖлӢӨ.
к°ңмЎ°м—җ лҢҖн•ң м„ұлҠҘкІҖмҰқмңјлЎңлҠ” к°ңмЎ° м „кіј нӣ„м—җ лҢҖн•ҳм—¬ мң„м„ұ 추м Ғ л°Ҹ TOD м •ліҙмғқм„ұ лҠҘл Ҙмқ„ 비көҗн•ҳкё° мң„н•ҳм—¬ мЈјмҡ” н•ӯлӘ©л“Өмқ„ мҲҳм№ҳнҷ” л°Ҹ м ҖмһҘ к°ҖлҠҘн•ң GPS мҲҳмӢ кё°лҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ. мӢӨм ң н•ӯкіөкё°м—җ мһҘм°©лҗҳм–ҙ мһҲлҠ” GPS м•Ҳн…ҢлӮҳлҘј к°ңмЎ° л°Ҹ м—°кІ°н•ҳм—¬ мқјм • мӢңк°„лҸҷм•Ҳ мЈјмҡ”н•ӯлӘ©л“Өмқҳ мҲҳм№ҳл“Өмқ„ мҲҳ집 л°Ҹ м ҖмһҘн•ҳмҳҖкі , 추нӣ„ 비көҗ л°Ҹ 분м„қн•ЁмңјлЎңмҚЁ м„ұлҠҘн–ҘмғҒм—җ лҢҖн•ң кІҖмҰқ л°©лІ•мңјлЎң м ңм•Ҳн•ҳмҳҖлӢӨ.
ліё л…јл¬ём—җм„ң м ңм•Ҳн•ң л°©м•Ҳмқ„ нҶөн•ҙ кіөм§ҖнҶөмӢ л¬ҙм „кё° м„ұлҠҘк°ңлҹү мӢң мһҗлҸҷ TOD м—°лҸҷмқҙ к°ҖлҠҘн•ҳл©° кіөм§ҖнҶөмӢ л¬ҙм „кё°лҘј нҷңмҡ©н•ң мһ‘м „мҡҙмҡ©лҠҘл Ҙ н–ҘмғҒмқҙ кё°лҢҖлҗңлӢӨ.
SATURN л¬ҙм „кё° мһҗлҸҷ TOD м—°лҸҷ л°©м•Ҳ
В
2.1 GPS мӢ нҳёлҘј нҷңмҡ©н•ң мһҗлҸҷ TOD м—°лҸҷ
GPS мӢ нҳёлҘј нҷңмҡ©н•ҳм—¬ SATURN л¬ҙм „кё°м—җ мһҗлҸҷ TODлҘј м—°лҸҷн•ҳлҠ” л°©м•ҲмқҖ Fig. 1. SATURN л¬ҙм „кё°мқҳ мһҗлҸҷ TOD м—°лҸҷ кө¬мЎ°лҠ” (b)мҷҖ (c), (d)мқҙлӢӨ. 3к°Җм§Җ мһҗлҸҷ TOD м—°лҸҷ л°©м•ҲмқҖ кё°мЎҙ HQ л¬ҙм „кё°мқҳ мҡҙмҡ©к°ңл…җ л°Ҹ м ңмһ‘мӮ¬ лі„ SATURN л¬ҙм „кё°мқҳ мһ…м¶ңл Ҙ кө¬м„ұм—җ л”°лқј кө¬л¶„лҗҳл©°, кё°мЎҙ н•ӯкіөкё°м—җ мһҘм°©лҗң GPS м•Ҳн…ҢлӮҳлҘј мқҙмҡ©н•ҳлҠ” м„Өкі„к°ңл…җмқҖ лҸҷмқјн•ҳлӢӨ.
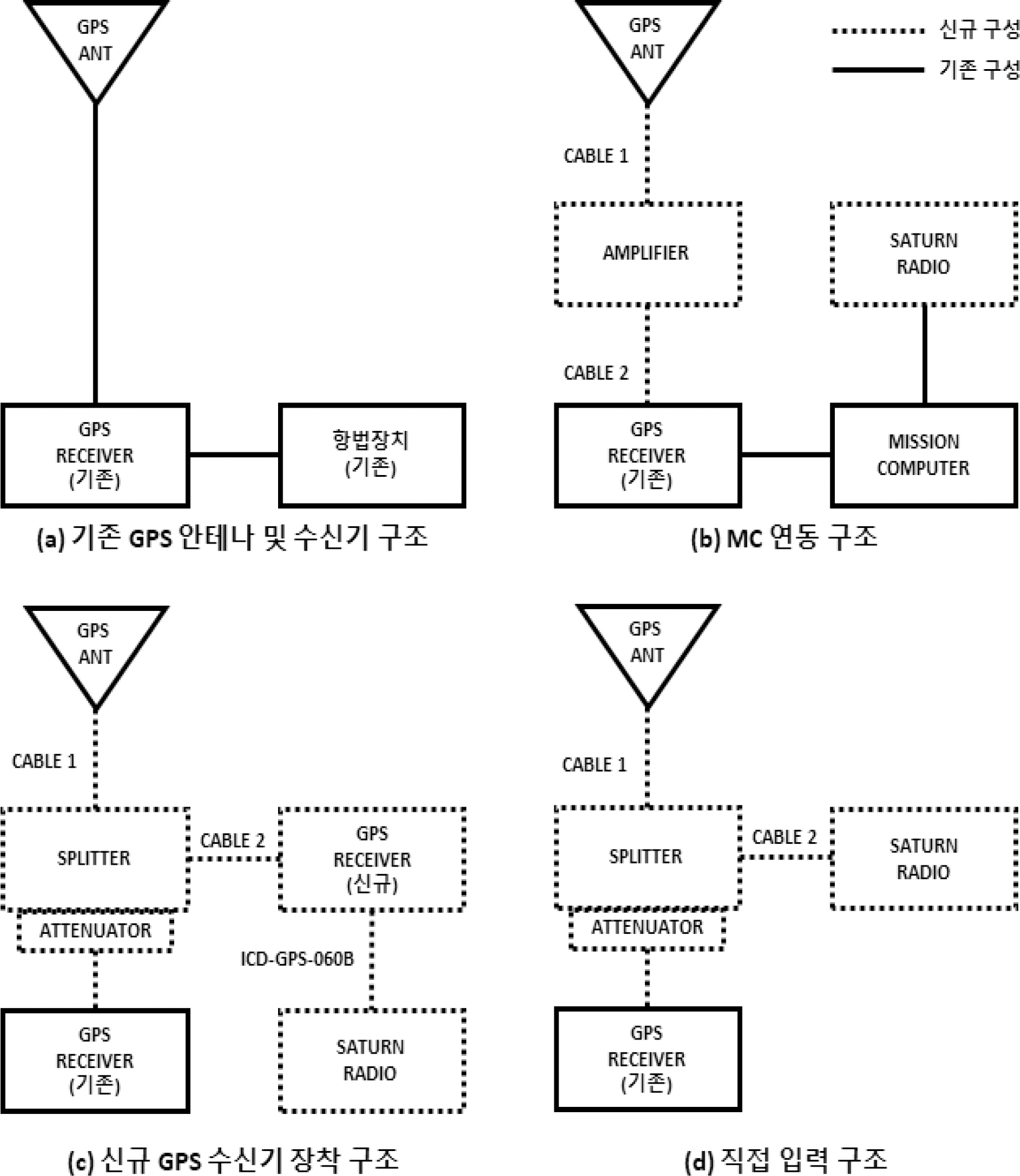
лЁјм Җ н•ӯкіөкё°мқҳ GPS м•Ҳн…ҢлӮҳмҷҖ мҲҳмӢ кё°мқҳ кө¬мЎ°лҠ” Fig. 1 (a)мҷҖ к°ҷмқҙ GPS м•Ҳн…ҢлӮҳмҷҖ мҲҳмӢ кё°к°Җ м§Ғм ‘ м—°кІ°лҗҳл©° GPS мҲҳмӢ кё°лҠ” н•ӯлІ•мһҘм№ҳмҷҖ м—°лҸҷлҗҳкі UHF л¬ҙм „кё°мҷҖлҠ” м—°лҸҷлҗҳм§Җ м•ҠлҠ”лӢӨ.
Fig. 1 (b)лҠ” HQ л¬ҙм „кё°мҷҖ мһ„л¬ҙ м»ҙн“Ён„°(Mission Computer)к°Җ м—°лҸҷлҗң мҡҙмҡ©к°ңл…җмқ„ к°Җм§ҖлҠ” м—°лҸҷнҳ• н•ӯкіөкё°м—җ лҢҖн•ң мһҗлҸҷ TOD м—°лҸҷл°©м•ҲмңјлЎң, SATURN л¬ҙм „кё°к°Җ HQ л¬ҙм „кё°лҘј лҢҖмІҙн•ҳм—¬ мӢ к·ң мһҘм°©лҗҳл©° 1553B нҶөмӢ мқ„ мқҙмҡ©н•ҳм—¬ кё°мЎҙ GPS мҲҳмӢ кё°лЎңл¶Җн„° л„ҳкІЁл°ӣлҠ” TOD м •ліҙлҘј мһ„л¬ҙ м»ҙн“Ён„°к°Җ мІҳлҰ¬н•ҳм—¬ SATURN л¬ҙм „кё°м—җ л„ҳкІЁмЈјлҠ” кё°мЎҙ кө¬м„ұмқ„ к·ёлҢҖлЎң мӮ¬мҡ©н•ңлӢӨ. лӢӨл§Ң, кё°мЎҙ GPS м•Ҳн…ҢлӮҳк°Җ MOPS к·ңкІ©м—җ л¶Җн•©н•ҳм§Җ м•Ҡм•„ GPS мң„м„ұ 추м Ғ м„ұлҠҘмқҙ л¶ҖмЎұн•ң кІҪмҡ°м—җ, GPS м•Ҳн…ҢлӮҳмҷҖ мҲҳмӢ кё° мӮ¬мқҙм—җ мӢ к·ңлЎң мҰқнҸӯкё°(Amplifier) л°Ҹ Cableмқ„ м—°лҸҷн•ҳм—¬ MOPS к·ңкІ©мқ„ л§ҢмЎұн•ҳлҸ„лЎқ м—°лҸҷн•ңлӢӨ.
Fig. 1 (c)мҷҖ (d)лҠ” HQ л¬ҙм „кё°мҷҖ мһ„л¬ҙ м»ҙн“Ён„°к°Җ м—°лҸҷлҗҳм§Җ м•ҠлҠ” мҡҙмҡ©к°ңл…җмқ„ к°Җм§ҖлҠ” лҸ…лҰҪнҳ• н•ӯкіөкё°м—җ лҢҖн•ң мһҗлҸҷ TOD м—°лҸҷл°©м•ҲмңјлЎң, SATURN л¬ҙм „кё°к°Җ GPS м •ліҙлҘј л°ӣм•„л“ӨмқҙлҠ” нҳ•нғңм—җ л”°лқј кө¬л¶„лҗҳм–ҙ진лӢӨ. лЁјм Җ (c)мҷҖ к°ҷмқҙ SATURN л¬ҙм „кё°к°Җ GPS м •ліҙлҘј Digital м •ліҙлЎң л°ӣм•„л“ӨмқҙлҠ” кІҪмҡ°, STANAG 4372м—җм„ң мҡ”кө¬н•ҳлҠ” Dataнҳ•мӢқмқё ICD-GPS-060Bм—җ л§һм¶° м „лӢ¬н•ҙ мЈјм–ҙм•ј н•ңлӢӨ[3]. мқҙ л•Ң, кё°мЎҙ GPS мҲҳмӢ кё°к°Җ ICD-GPS-060B нҳ•нғңлЎң GPS м •ліҙ м „лӢ¬мқҙ л¶Ҳк°ҖлҠҘн•ң кІҪмҡ°, мӢ к·ң GPS мҲҳмӢ кё°лҘј мһҘм°©н•ҳм—¬ SATURN л¬ҙм „кё°к°Җ GPS м •ліҙлҘј л°ӣм•„л“Өмқј мҲҳ мһҲлҸ„лЎқ н•ңлӢӨ. л°ҳл©ҙ Fig. 1 (d)мҷҖ к°ҷмқҙ SATURN л¬ҙм „кё° лӮҙм—җ GPS мҲҳмӢ кё°к°Җ лӮҙмһҘлҗҳм–ҙ SATURN л¬ҙм „кё° мҠӨмҠӨлЎң TOD м •ліҙлҘј м—°мӮ°н•ҙ лӮј мҲҳ мһҲлҠ” кІҪмҡ°, Analog GPS м •ліҙлҘј 분기н•ҙм„ң мһ…л Ҙн•ҙ мӨҖлӢӨ.
Fig. 1 (c), (d) м—ӯмӢң н•ӯкіөкё°м—җ мһҘм°©лҗң кё°мЎҙ GPS м•Ҳн…ҢлӮҳк°Җ MOPS к·ңкІ©мқ„ л§ҢмЎұн•ҳм§Җ м•Ҡм•„ GPS мң„м„ұ추м Ғм„ұлҠҘмқҙ л–Ём–ҙм§ҖлҠ” кІҪмҡ°, MOPS к·ңкІ©м—җ л§һкІҢ к°ңмЎ°к°Җ н•„мҡ”н•ҳл©°, Fig. 1 (b)мҷҖ лӢӨлҘҙкІҢ мӢ нҳё 분기к°Җ н•„мҡ”н•ҳлҜҖлЎң л¶„н• кё°(Splitter)лҘј м Ғмҡ©н•ңлӢӨ. лҳҗн•ң GPS м•Ҳн…ҢлӮҳлҘј MOPS к·ңкІ©м—җ л§һкІҢ к°ңмЎ°н•ҳлҠ” кІҪмҡ°, кіөнҶөм ҒмңјлЎң GPS мҲҳмӢ кё°м—җ мһ…л Ҙ к°ҖлҠҘн•ң мөңкі м „л ҘлІ”мң„ лӮҙм—җм„ң Analog GPS мӢ нҳё мҰқнҸӯмқҙ к°ҖлҠҘн•ҳлӢӨ. л°ҳл©ҙ кё°мЎҙ GPS мҲҳмӢ кё°мқҳ мһ…л Ҙ к°ҖлҠҘн•ң мөңкі м „л Ҙмқҙ нҷ•мқё л¶Ҳк°ҖлҠҘн•ң кІҪмҡ°м—җлҠ” м„Өкі„мғҒм—җм„ң л°ңмғқн•ң мһүм—¬мқҙл“қмқ„ к°җмҮ кё°(Attenuator)лҘј мӮ¬мҡ©н•ҳм—¬ к°җмҮ мӢңнӮҙмңјлЎңмҚЁ кё°мЎҙ GPS мҲҳмӢ кё°лҘј мҡҙмҡ©н•ҳлҠ” мһ…л Ҙ м „л Ҙкіј лҸҷмқјн•ҳкІҢ н•ҳм—¬ кё°мЎҙ GPS мҲҳмӢ кё°м—җ лҜём№ҳлҠ” мҳҒн–Ҙмқ„ мөңмҶҢнҷ” мӢңнӮЁлӢӨ.
2.2 н•ӯкіөкё°мҡ© GPS м•Ҳн…ҢлӮҳ к·ңкІ©
н•ӯкіөкё°мҷҖ н•ӯкіөкё° м „мһҗ мӢңмҠӨн…ңкіј кҙҖл Ёлҗң кё°мҲ кіј кіјн•ҷмқ„ л°ңм „мӢңнӮӨлҠ” 비мҳҒлҰ¬ лӢЁмІҙмқё RTCAм—җм„ң мғқм„ұн•ң к·ңкІ© л“Ө мӨ‘, н•ӯкіөкё° мҡ© GNSS м•Ҳн…ҢлӮҳм—җ лҢҖн•ң к·ңкІ©мқҖ RTCA DO-228кіј DO-301мқҙ мһҲлӢӨ. DO-228мқҖ GPS(лҜёкөӯ)мҷҖ GLONASS(лҹ¬мӢңм•„)м—җ лҢҖн•ң н•ӯкіөкё°мҡ© GNSS(Global Navigation Satellite System, лІ”м§Җкө¬ мң„м„ұн•ӯлІ• мӢңмҠӨн…ң) м•Ҳн…ҢлӮҳмқҳ MOPSмқҙл©°, мҲҳлҸҷ м•Ҳн…ҢлӮҳмҷҖ мҲҳлҸҷ м•Ҳн…ҢлӮҳм—җ мҰқнҸӯкё°к°Җ м§Ғм ‘лҗң лҠҘлҸҷ м•Ҳн…ҢлӮҳ 2к°Җм§Җ нҳ•нғңм—җ лҢҖн•ҳм—¬ м •мқҳн•ҳкі мһҲлӢӨ[4].
DO-301мқҖ GPS(лҜёкөӯ)мҷҖ GALILEO(мң лҹҪ)м—җ лҢҖн•ң н•ӯкіөкё°мҡ© GNSS м•Ҳн…ҢлӮҳмқҳ MOPSмқҙкі , лҠҘлҸҷ м•Ҳн…ҢлӮҳ мҡҙмҡ©м—җ н•„мҡ”н•ң мөңмҶҢ мҡҙмҡ© м„ұлҠҘм—җ лҢҖн•ҙм„ңл§Ң м •мқҳн•ҳкі мһҲмңјл©°, DO-228м—җ м •мқҳлҗң лҠҘлҸҷ м•Ҳн…ҢлӮҳ мөңмҶҢ м„ұлҠҘм—җ 비н•ҙ лӘҮ к°Җм§Җ н•ӯлӘ©мқҙ 추к°Җ л°Ҹ ліҙмҷ„лҗҳм—ҲлӢӨ[5].
DO-301 к·ңкІ©мқҳ мЈјмҡ” м„ұлҠҘ н•ӯлӘ©мқё G/T Ratio(Gain to Noise Temperature Ratio, мқҙл“қ лҢҖ мһЎмқҢмҳЁлҸ„ 비)лҠ” GPS м•Ҳн…ҢлӮҳмқҳ нҢЁн„ҙмқҙл“қкіј GPS м•Ҳн…ҢлӮҳ л°Ҹ GPS м•Ҳн…ҢлӮҳмқҳ н•ҳмң„мҶҢмһҗл“Өмқ„ м „л¶Җ нҸ¬н•Ён•ң мһЎмқҢмҳЁлҸ„м—җ лҢҖн•ң 비лЎңмҚЁ, GPS мӢңмҠӨн…ңм—җм„ң л°ҳмҶЎ мЈјнҢҢмҲҳ(L1, 1575.42 MHz)м—җ мӢӨл Ө мһҲлҠ” мң„м№ҳ л°Ҹ мӢңк°„м •ліҙлҘј ліөмЎ°н•ҳкё° мң„н•ҙм„ң н•„мҡ”н•ң мӢ нҳё лҢҖ мһЎмқҢ비(Signal To Noise Ratio, S/N)лҘј кө¬м„ұн•ҳлҠ” мЈјмҡ” н•ӯлӘ©мқҙлӢӨ. G/T RatioлҠ” кі лҸ„к°Ғ(Elevation Angel) 5лҸ„, м „мІҙ л°©мң„к°Ғ л°Ҹ м „мІҙ нҷҳкІҪмҳЁлҸ„м—җ лҢҖн•ҙм„ң L1Вұ8 MHz мЈјнҢҢмҲҳ лІ”мң„лӮҙм—җм„ң вҲ’32.6 dB/K, L1Вұ2 MHz мЈјнҢҢмҲҳ лІ”мң„лӮҙм—җм„ң вҲ’31.6 dB/K ліҙлӢӨ мһ‘м§Җ м•Ҡм•„м•ј н•ңлӢӨ. кі лҸ„к°Ғ 5лҸ„лҠ” мӢӨ мҡҙмҡ© нҷҳкІҪм—җм„ң м•Ҳн…ҢлӮҳк°Җ мӢ нҳёлҘј м•Ҳм •м ҒмңјлЎң мҲҳмӢ н• мҲҳ мһҲлҠ” мөңмҶҢн•ңмқҳ к°ҒлҸ„мқҙл©°, м•„лһҳ мӢқ (1)кіј к°ҷмқҙ н‘ңнҳ„лҗңлӢӨ.
GAлҠ” нӣ„л°© мҰқнҸӯкё° мқҙл“қмқ„ м ңмҷён•ң м•Ҳн…ҢлӮҳ нҢЁн„ҙл§Ңмқҳмқҙл“қмқ„ мқҳлҜён•ңлӢӨ. TSYSлҠ” м•Ҳн…ҢлӮҳмҷҖ н•ҳмң„ кө¬м„ұн’Ҳл“Өмқҳ мһ…л ҘмҳЁлҸ„мқҳ н•©мңјлЎң Kelvin лӢЁмң„лЎң н‘ңнҳ„лҗңлӢӨ. S/NOлҠ” мӢ нҳёмқҳ нҒ¬кё°к°Җ мһЎмқҢ лҢҖ비 м–јл§ҲлӮҳ нҒ¬лғҗм—җ лҢҖн•ң мҲҳм№ҳмқҙкі , kлҠ” ліјмё л§Ң мғҒмҲҳлЎң 1.38065Г—10вҲ’23 W/Hz/Kмқҙл©°, GS лҠ” м•Ҳн…ҢлӮҳмқҳ л“ұк°Җ мҲҳлҸҷ мқҙл“қмңјлЎң GAмҷҖ лҸҷмқјн•ң к°ңл…җмқҙлӢӨ. TAлҠ” мң нҡЁ м•Ҳн…ҢлӮҳ мҳЁлҸ„лЎң DO-301 Appendix Aм—җм„ң мқјл°ҳм ҒмңјлЎң 75 Kм—җм„ң 100 K мӮ¬мқҙмқҳ к°’мқ„ к°Җ진лӢӨкі лӘ…мӢңн•ҳкі мһҲмңјл©°, TRлҠ” н•ҳмң„ кө¬м„ұн’Ҳ мӨ‘ мІ« лІҲм§ё кө¬м„ұн’Ҳмқҳ мһ…л ҘмҳЁлҸ„лЎң лӢЁмң„лҠ” KelvinмқҙлӢӨ. GRлҠ” н•ҳмң„ кө¬м„ұн’Ҳ мӨ‘ мІ« лІҲм§ёмқҳ мқҙл“қмқ„ м Ғмҡ©н•ңлӢӨ. мӢқ (2)лҠ” мӢ нҳё лҢҖ мһЎмқҢ비(S/NO)лҘј мһ…л Ҙ мӘҪм—җм„ң м •мқҳн•ң кІғмңјлЎң, м•Ҳн…ҢлӮҳмқҳ л“ұк°Җ мҲҳлҸҷ мқҙл“қмқё GSлҠ” нҢЁн„ҙмқҙл“қмқё GAлЎң л°”лЎң ліҖнҷҳ к°ҖлҠҘн•ҳлӢӨ. TSYSлҠ” мӢқ (3)кіј к°ҷмқҙ н•ҳмң„ кө¬м„ұн’Ҳл“Ө мӨ‘ мІ« лІҲм§ёмқҳ мқҙл“қ(GR)мқҙ нҒҙмҲҳлЎқ TAмҷҖ TRмқҳ н•©м—җ мҲҳл ҙн•ңлӢӨ. кІ°лЎ м ҒмңјлЎң мӢқ (2)мқҳ л§Ё мҳӨлҘёмӘҪ н•ӯкіј к°ҷмқҙ мӢ нҳё лҢҖ мһЎмқҢ비мқҳ мөңмҶҢк°’мқҖ мң„м„ұмңјлЎңл¶Җн„° мҶЎмӢ лҗң мӢ нҳёк°Җ м•Ҳн…ҢлӮҳлЎң мһ…л ҘлҗҳлҠ” мөңмҶҢ мӢ нҳё(SMIN)мҷҖ ліјмё л§Ң мғҒмҲҳ k, G/T RatioлЎң кө¬м„ұлҗҳл©°, м„Өкі„мһҗк°Җ G/T RatioлҘј нҒ¬кІҢ н• мҲҳлЎқ мӢ нҳё лҢҖ мһЎмқҢ비(S/NO) м„ұлҠҘмқҙ мўӢм•„м ё мӢ нҳёмқҳ м„ёкё°к°Җ лҜём•Ҫн•ң мң„м„ұмқ„ нғҗм§Җн• нҷ•лҘ мқҙ лҶ’아진лӢӨ. G/T RatioлҠ” DO-228кіј к°ҷмқҙ мҲҳлҸҷ м•Ҳн…ҢлӮҳм—җ лӢЁмҲңнһҲ мҰқнҸӯкё°лҘј лӮҙмһҘн•ң мҲҳмӨҖм—җм„ң лІ—м–ҙлӮҳ, м•Ҳн…ҢлӮҳмҷҖ мҰқнҸӯкё°к°Җ мң лҸҷм ҒмңјлЎң м—°лҸҷлҗң мӢңмҠӨн…ң мёЎл©ҙм—җм„ң н•„мҡ”н•ң м„ұлҠҘмқ„ м •мқҳн–ҲлӢӨлҠ” м җм—җ мқҳлҜёк°Җ мһҲлӢӨ. мқҙлҘј нҷңмҡ©н•ҳл©ҙ, DO-228м—җм„ң м •мқҳн•ң мҲҳлҸҷ м•Ҳн…ҢлӮҳм—җ мҷёл¶Җ мҰқнҸӯкё°лҘј м—°лҸҷн•ҳлҠ” л°©мӢқмңјлЎң DO-301м—җм„ң м ңмӢңн•ң G/T Ratio мҡ”кө¬ м„ұлҠҘмқ„ л§ҢмЎұн•ҳлҠ” мӢңмҠӨн…ңмқ„ м„Өкі„н• мҲҳ мһҲлӢӨ.
2.3 Legacy н•ӯкіөкё° GPS м•Ҳн…ҢлӮҳ мһҘм°© нҳ„нҷ©
н•ӯкіөкё°м—җ мһҘм°©лҗҳм–ҙ мһҲлҠ” GPS м•Ҳн…ҢлӮҳлҘј нҷңмҡ©н•ҳм—¬ SATURN л¬ҙм „кё°м—җ мһҗлҸҷмңјлЎң TODлҘј м—°лҸҷн•ҳкё° мң„н•ҙм„ңлҠ” кё°мЎҙ н•ӯкіөкё°мқҳ GPS м•Ҳн…ҢлӮҳм—җ лҢҖн•ң нҳ„нҷ© нҢҢм•…мқҙ н•„мҡ”н•ҳлӢӨ. нҳ„мһ¬ 진н–ү мӨ‘мқё <н”јм•„мӢқлі„мһҘ비 м„ұлҠҘк°ңлҹү мӮ¬м—…>мқ„ нҶөн•ҙ нҷ•мқён•ң кё°мЎҙ н•ӯкіөкё°мқҳ GPS м•Ҳн…ҢлӮҳ мў…лҘҳлҠ” MAGR(Miniaturized Airbone Global Positioning System)мҡ© GPS м•Ҳн…ҢлӮҳ(мҲҳлҸҷ)мҷҖ TAWS(Terrain Awareness and Warning Systems)мҡ© GPS м•Ҳн…ҢлӮҳ(лҠҘлҸҷ), мқјл°ҳ GPS м•Ҳн…ҢлӮҳ 3мў…лҘҳмқҙл©° м•„лһҳ Table 1кіј к°ҷлӢӨ.
TableВ 1.
Types of legacy aircraft GPS antenna
к·ңкІ© лІ„м „мқҖ мЎ°кёҲм”© лӢӨлҘҙм§Җл§Ң, лӘЁл“ м•Ҳн…ҢлӮҳк°Җ кіөнҶөм ҒмңјлЎң н•ӯкіөмһҘ비м—җ лҢҖн•ң нҷҳкІҪмӢңн—ҳк·ңкІ©мқё RTCA DO-160мқҖ л§ҢмЎұн•ҳкі мһҲлӢӨ. мң нҳ•1мқҳ MAGRмҡ© GPS м•Ҳн…ҢлӮҳлҠ” нӣ„л°©м—җ лі„лҸ„мқҳ IF мҰқнҸӯкё°к°Җ мһҲкё° л•Ңл¬ём—җ L1&L2 лҢҖм—ӯмқ„ мҲҳмӢ н•ҳлҠ” мҲҳлҸҷ м•Ҳн…ҢлӮҳк°Җ м Ғмҡ©лҗҳм–ҙмһҲлӢӨ. лҢҖмЎ°м ҒмңјлЎң мң нҳ•3мқҳ TAWS GPS м•Ҳн…ҢлӮҳлҠ” L1 лҢҖм—ӯл§Ңмқ„ мӮ¬мҡ©н•ҳл©° лҠҘлҸҷ м•Ҳн…ҢлӮҳлҘј мӮ¬мҡ©н•ңлӢӨ. мң нҳ•2мқҳ н•ҙлӢ№н•ҳлҠ” GPS м•Ҳн…ҢлӮҳлҠ” GPS мҲҳмӢ кё° мў…лҘҳм—җ л”°лқј мұ„л„җкіј мҲҳлҸҷ/лҠҘлҸҷ м•Ҳн…ҢлӮҳлЎң кө¬л¶„лҗҳл©°, лҠҘлҸҷ м•Ҳн…ҢлӮҳмқҳ кІҪмҡ° DO-228 к·ңкІ©м—җ м •мқҳлҗҳм–ҙ мһҲлҠ” м•Ҳн…ҢлӮҳ мқҙл“қмқ„ к°Җ진лӢӨ.
2.4 SATURN л¬ҙм „кё°мҷҖ GPSм—°лҸҷмқ„ мң„н•ң м„Өкі„
к°Ғ мң нҳ•м—җ лҢҖн•ҙм„ң DO-301м—җм„ң м •мқҳн•ң G/T RatioлҘј л§ҢмЎұмӢңнӮӨлҠ” м„Өкі„лҘј мң„н•ҙм„ңлҠ” к°Ғ мҶҢмһҗл“Өмқҳ мһЎмқҢмҳЁлҸ„ к°’мқ„ м•Ңм•„м•ј н•ңлӢӨ. мқҙл“қмқ„ к°Җм§ҖлҠ” н•ҳмң„ кө¬м„ұн’Ҳмқҳ кІҪмҡ° мЈјлЎң мҰқнҸӯкё°мқҙл©°, м„ұлҠҘ м§Җн‘ңмӨ‘ н•ҳлӮҳмқё мһЎмқҢм§ҖмҲҳ(Noise Figure)лҘј мӢқ (4)мҷҖ мӢқ (5)лҘј нҷңмҡ©н•ҳм—¬ мһЎмқҢмҳЁлҸ„(Noise Temperature)лЎң ліҖнҷҳн•ңлӢӨ. мҶҗмӢӨмқ„ к°Җм§ҖлҠ” н•ҳмң„ кө¬м„ұн’Ҳмқҳ кІҪмҡ° мЈјлЎң Cableмқҙл©°, л§Ҳм°¬к°Җм§ҖлЎң Cable мҶҗмӢӨк°’мқ„ мӢқ (6)мқ„ нҷңмҡ©н•ҳм—¬ мһЎмқҢмҳЁлҸ„ к°’мңјлЎң ліҖнҷҳн•ңлӢӨ. лӘЁл“ н•ҳмң„кө¬м„ұн’Ҳмқҳ мһЎмқҢмҳЁлҸ„ к°’мқ„ мӢқ (3)м—җ лҢҖмһ… н• мҲҳ мһҲм–ҙм•ј G/T Ratio кі„мӮ°мқҙ к°ҖлҠҘн•ҳлӢӨ[5,6].
TEлҠ” мң нҡЁ мһЎмқҢмҳЁлҸ„, T0лҠ” мЈјліҖ мҳЁлҸ„мқҙл©° л‘ҳ лӢӨ KelvinмңјлЎң н‘ңнҳ„лҗҳл©°, FлҠ” мһЎмқҢм§ҖмҲҳлЎң Noise Factor, L мқҖ Loss Factor мқҙлӢӨ. мӢқ (5), (6)м—җ кіөнҶөм ҒмңјлЎң T0(мЈјліҖмҳЁлҸ„)к°Җ л“Өм–ҙк°ҖлҠ”лҚ°, н•ӯкіөкё°мқҳ кІҪмҡ° мЈјмҡ” мһ‘м „ 비н–ү кі лҸ„м—җ н•ҙлӢ№н•ҳлҠ” Sky мҳЁлҸ„к°’мқ„ лҢҖмһ…н•ҳм—¬ м„Өкі„н•ҳлҠ”кІғмқҙ нғҖлӢ№н•ҳм§Җл§Ң, мӮ¬кі„м Ҳмқҙ мһҲлҠ” мҡ°лҰ¬лӮҳлқјм—җм„ң Sky мҳЁлҸ„лҠ” кі„м Ҳлі„лЎң л°”лҖҢкё° л•Ңл¬ём—җ к°ҖмһҘ лҚ”мҡҙ м—¬лҰ„лӮ мқҳ нҸүк· кё°мҳЁ мӨ‘ мөңкі к°’мқё 298.4 K(+25.4 в„ғ)мқ„ мҳ¬лҰјн•ң 300 K (+27 в„ғ)мқ„ м Ғмҡ©н•ҳм—¬ м„Өкі„н•ҳмҳҖлӢӨ[7]. ISA(International Standard Atmosphere) н‘ңмҷҖ к°ҷмқҙ кі лҸ„к°Җ 1000 ft мҳ¬лқјк°ҲмҲҳлЎқ мҳЁлҸ„к°Җ вҲ’2 в„ғм”© л–Ём–ҙм§Җкё° л•Ңл¬ём—җ G/T RatioлҠ” к°ңм„ лҗҳлҠ” л°©н–ҘмңјлЎңл§Ң мӣҖм§ҒмқёлӢӨ[8].
мң нҳ•1м—җ лҢҖн•ҙм„ң Fig. 1 (d)мҷҖ к°ҷмқҙ н•ӯкіөкё°лҘј к°ңмЎ°н•ҳкё° мң„н•ҙ лӘЁл“ кө¬м„ұн’Ҳл“Өмқҳ мһЎмқҢм§ҖмҲҳмҷҖ мҶҗмӢӨ, мқҙл“қмқ„ нҷ•мқён•ҳкі мқҙлҘј нҷңмҡ©н•ҳм—¬ мӢңмҠӨн…ң м „мІҙмқҳ TSYS(Noise Temperature)лЎң нҷҳмӮ°н•ң нӣ„ G/T RatioлҘј л§ҢмЎұн•ҳлҸ„лЎқ м„Өкі„лҘј 진н–үн•ҳл©ҙ Table 2мҷҖ к°ҷлӢӨ. м•һм„ң м–ёкёүн•ң л°”мҷҖ к°ҷмқҙ Sky мҳЁлҸ„лҠ” 300 Kмқҙ м Ғмҡ©лҗҳм–ҙ мһҲмңјл©°, мң нҡЁ м•Ҳн…ҢлӮҳ мҳЁлҸ„лҠ” DO-301м—җм„ң м ңмӢңн•ң мөңлҢҖк°’мқё 100 KлҘј м Ғмҡ©н•ҳмҳҖлӢӨ. м•Ҳн…ҢлӮҳ мқҙл“қмқҳ кІҪмҡ° лҢҖн‘ңм Ғмқё м•Ҳн…ҢлӮҳ м ңмһ‘мӮ¬м—җм„ң Elevation Angle = 5 deg мқјл•Ңмқҳ мқҙл“қмқ„ вҲ’4.5 dBicлЎң м ңмһ‘н•ҳкё° л•Ңл¬ём—җ к·ёлҢҖлЎң м Ғмҡ©н•ҳмҳҖлӢӨ[9].
TableВ 2.
Design for automatic TOD(long cable) sync.
н•ӯкіөкё°м—җ мһҘм°©лҗҳм–ҙ мһҲлҠ” кё°мЎҙ GPS м•Ҳн…ҢлӮҳм—җ мҲҳмӢ лҗҳлҠ” мӢ нҳёлҘј л¶„н• н•ҳм—¬ SATURN л¬ҙм „кё°мҷҖ м—°лҸҷн•ҳлҸ„лЎқ м„Өкі„н•ҳкё° л•Ңл¬ём—җ GPSмӢ нҳёк°Җ л¶„н• лҗҳлҠ” кіјм •м—җм„ң мӢ нҳёмқҳ к°җмҮ к°Җ м—ҶлҸ„лЎқ мҰқнҸӯкё°(Amplifier)лӮҳ лҠҘлҸҷ л¶„н• кё°(Active Splitter)лҘј н•ӯкіөкё°м—җ мӢ к·ң мһҘм°©н•ҙм•ј н•ңлӢӨ. мҳҲлҘј л“Өм–ҙ Fig. 1 (b)мҷҖ к°ҷмқҖ кІҪмҡ° GPSмӢ нҳёмқҳ 분기к°Җ н•„мҡ”м—ҶлҠ” кІҪмҡ° мҰқнҸӯкё°лҘј мӮ¬мҡ©н•ҳкі , Fig. 1 (c)мҷҖ (d)мқҳ кІҪмҡ° GPSмӢ нҳёмқҳ 분기к°Җ н•„мҡ”н•ҳкё° л•Ңл¬ём—җ мҰқнҸӯкё° мқҙнӣ„м—җ м—°кІ°лҗҳлҠ” л¶„н• кё°лҘј мӮ¬мҡ©н•ҳкұ°лӮҳ Table 3кіј к°ҷмқҙ мқҙл“қмқҙ нҒ° л¶„н• кё° н•ҳлӮҳл§Ңмқ„ мӮ¬мҡ©н•ңлӢӨ.
TableВ 3.
Design for automatic TOD(short cable) sync.
GPSм•Ҳн…ҢлӮҳмҷҖ л¶„н• кё°к°„мқҳ Cable кёёмқҙк°Җ кёём–ҙм§ҲмҲҳлЎқ(к°җмҮ к°Җ нҒҙмҲҳлЎқ) G/T Ratio м„ұлҠҘмқҙ м•Ҳ мўӢм•„м§Җкё° л•Ңл¬ём—җ л¶„н• кё°мқҳ мһҘм°©мң„м№ҳлҠ” Cable1 кёёмқҙмҷҖ н•ӯкіөкё° 진лҸҷмқ„ н•Ёк»ҳ кі л Өн•ҳм—¬ м„ м •н•ҙм•ј н•ңлӢӨ. Table 2м—җм„ң Cable1мқҳ кёёмқҙлҠ” нҳ„мһ¬ 진н–ү мӨ‘мқё <н”јм•„мӢқлі„мһҘ비 м„ұлҠҘк°ңлҹү мӮ¬м—…> 진н–үк°„ н•ӯкіөкё°мқҳ GPSм•Ҳн…ҢлӮҳм—җм„ң н”јм•„мӢқлі„мһҘ비к№Ңм§Җмқҳ кІҪлЎңлҘј мһҗлҸҷ TOD м—°лҸҷлҗҳлҸ„лЎқ к°ңмЎ°н•ң м„Өкі„мқҙл Ҙмқ„ л°ҳмҳҒн•ҳм—¬, 2 mлҘј м Ғмҡ©н•ҳмҳҖкі Cable1мқҳ мҶҗмӢӨмқ„ мӮ°м •н•ҳмҳҖлӢӨ. Cable2мҷҖ Cable3мқҳ кёёмқҙ(мҶҗмӢӨк°’)лҠ” н”јм•„мӢқлі„мһҘ비 мһҗлҸҷ TOD м—°лҸҷмӢңм—җ мӮ¬мҡ©лҗҳм—ҲлҚҳ мөңмһҘ кёёмқҙмқҳ Cable кёёмқҙлҘј м Ғмҡ©н•ҳмҳҖм§Җл§Ң, GPS м•Ҳн…ҢлӮҳмқҳ мһҘм°©мң„м№ҳмҷҖ н”јм•„мӢқлі„мһҘ비мқҳ мһҘм°©мң„м№ҳк°Җ к°Җк№Ңмҡҙ кё°мў…мқҳ кІҪмҡ°м—җлҠ” Table 3кіј к°ҷмқҙ Cable2л§ҢмңјлЎң м—°кІ°мқҙ к°ҖлҠҘн•ҳкё° л•Ңл¬ём—җ н•ҳмң„ кө¬м„ұн’Ҳ м—°кІ°мқҙ л¶Ҳн•„мҡ”н•ҳлӢӨ.
Cable1,2,3лҠ” TNCмҷҖ SMA м»Өл„Ҙн„°к°Җ мЎ°лҰҪ к°ҖлҠҘн•ң RF лҸҷ축 Cableмқё RG402 Cableмқ„ к°Җм •н•ҳмҳҖмңјл©°, L1 лҢҖм—ӯмқё 1.5 GHzм—җм„ң 1 mлӢ№ 0.43 dBмқҳ кё°лҢҖ мҶҗмӢӨк°’мқ„ к°Җ진лӢӨ[10]. Cableмқҳ лӢЁмң„ mлӢ№ мҶҗмӢӨк°’мқҙ нҒ° кІҪмҡ°, ARINC 743Aм—җм„ң мҡ”кө¬н•ҳлҠ” м „мІҙ Cable мҶҗмӢӨмқё вҲ’13 dBлҘј л„ҳм–ҙк°Ҳ мҲҳ мһҲкё° л•Ңл¬ём—җ Cableм—җ мЎ°лҰҪ к°ҖлҠҘн•ң м»Өл„Ҙн„° мў…лҘҳмҷҖ л°°м„ кІҪлЎң мғҒ Cableмқҳ көҪнһҳк°Ғмқ„ кі л Өн•ҳм—¬ Cableмқҳ л‘җк»ҳлҘј м„ нғқн•ҳм—¬м•ј н•ңлӢӨ.
м•һм„ң мӢқ (3)м—җм„ң м„ӨлӘ…н•ң л°”мҷҖ к°ҷмқҙ н•ҳмң„ кө¬м„ұн’Ҳ мӨ‘ мІ« лІҲм§ё нҡҢлЎңмқҳ мқҙл“қ(GR)мқҙ нҒ¬л©ҙ TSYSк°Җ TAмҷҖ TRмқҳ н•©м—җ мҲҳл ҙн•ҳм§Җл§Ң, нҳ„мһ¬ м„Өкі„м—җм„ңлҠ” н•ҳмң„ кө¬м„ұн’Ҳмқҳ мІ« лІҲм§ё нҡҢлЎңмқҳ мқҙл“қмқҖ Cable 1мқҳ мҶҗмӢӨк°’мқҙлӢӨ. м°Ём„ мұ…мңјлЎң н•ҳмң„ кө¬м„ұн’Ҳ мӨ‘ л‘җ лІҲм§ёмқё лҠҘлҸҷ л¶„н• кё° л’Өм—җ м—°кІ°лҗң кө¬м„ұн’Ҳмқҳ мһЎмқҢмҳЁлҸ„к°’л“Өмқҳ мҳҒн–Ҙл Ҙмқ„ мөңмҶҢнҷ” мӢңнӮӨл©ҙм„ң, мөңмһҘ кёёмқҙлҘј к°Җм •н•ң Cable2мҷҖ Cable3мқҳ мҶҗмӢӨк°’мқ„ нҸ¬н•Ён•ҳм—¬лҸ„ DO-301м—җм„ң м •мқҳн•ң, MBTTG(Minimum Boresight Total Transducer Gain, at Оё = 90В°, мғҒмҠ№к°Ғ 90лҸ„м—җм„ң мөңмҶҢ м „мІҙ м „лӢ¬ мқҙл“қ)мқҳ к·ңкІ©мқё 29.5 dB мқҙмғҒмқ„ л§ҢмЎұн• мҲҳ мһҲлҸ„лЎқ, лҠҘлҸҷ 분배기мқҳ мқҙл“қмқ„ 34 dBлЎң м„Өм •н•ҳмҳҖлӢӨ. мғҒкё°мҷҖ к°ҷмқҖ м„Өкі„ 진н–үмӢң, G/T RatioлҠ” вҲ’30.15 dB/K, MBTTGлҠ” 30.8 dBмқҙл©° DO-301м—җм„ң м •мқҳн•ң кё°мӨҖмқ„ л§ҢмЎұн•ңлӢӨ.
мң нҳ• 2мқҳ лҠҘлҸҷ м•Ҳн…ҢлӮҳмҷҖ мң нҳ• 3мқҳ кІҪмҡ°лҠ” мқҙлҜё м•Ҳн…ҢлӮҳм—җ мҰқнҸӯкё°к°Җ м§Ғм ‘лҗң нҳ•нғңлЎң, мң нҳ• 1кіј лӢӨлҘҙкІҢ Cable1мқҙ мҰқнҸӯкё° нӣ„л°©м—җ м—°кІ°лҗҳкё° л•Ңл¬ём—җ G/T RatioмҷҖ MBTTGлҘј л§ҢмЎұмӢңнӮӨкё° мң„н•ң мқҙл“қмқҙ мқјл¶Җ нҷ•ліҙлҗң мғҒнғңмқҙлӢӨ. мң нҳ• 1кіј к°ҷмқҙ лҠҘлҸҷ л¶„н• кё°лҘј м Ғмҡ©н•ҳм—¬ м„Өкі„н•ҳлҗҳ кё°мЎҙ GPS мҲҳмӢ кё° мӘҪмңјлЎң м „лӢ¬лҗҳлҠ” мһүм—¬ мқҙл“қ мӨ‘ мқјл¶Җ лҳҗлҠ” м „л¶ҖлҘј к°җмҮ кё°лЎң к°җмҮ н•ҳм—¬ кё°мЎҙ GPS мҲҳмӢ кё°мқҳ мһ…л ҘлҗҳлҠ” мӢ нҳёмқҳ нҒ¬кё°лҘј м ңн•ңн•ңлӢӨ. лӢЁ, к°җмҮ кё°мқҳ мң„м№ҳлҠ” л°ҳл“ңмӢң лҠҘлҸҷ 분배기 нӣ„л°©м—җ м—°кІ°лҗҳм–ҙм•ј н•ңлӢӨ.
мӢңн—ҳл°©лІ• л°Ҹ мёЎм •
В
3.1 мӢңн—ҳ лӘ©м Ғ л°Ҹ к°ңмҡ”
ліё л…јл¬ём—җм„ң м ңм•Ҳн•ң мһҗлҸҷ TOD м—°лҸҷ л°©м•Ҳм—җ лҢҖн•ң кІҖмҰқмқ„ мң„н•ҙм„ң мӢӨм ң н•ӯкіөкё°м—җ мһҘм°©лҗҳм–ҙ мһҲлҠ” GPS м•Ҳн…ҢлӮҳлҘј мӮ¬мҡ©н•ҳм—¬ к°ңмЎ° м „/нӣ„мқҳ м„ұлҠҘмқ„ нҷ•мқён•ҳкі л¶„м„қн•ңлӢӨ. к°ңмЎ°лҘј нҶөн•ҙ н–ҘмғҒлҗң G/T RatioлҠ” GPS мӢ нҳё мҲҳмӢ кІҪлЎңмқҳ мӢ нҳё лҢҖ мһЎмқҢ비мқҳ м„ұлҠҘмқ„ к°ңм„ н•ҳм—¬ к°ңмЎ° м „м—җлҠ” нғҗм§Җн• мҲҳ м—Ҷм—ҲлҚҳ мһ‘мқҖ мң„м„ұмӢ нҳёлҸ„ к°җм§Җ к°ҖлҠҘн•ҳкІҢ лҗҳл©° мқҙлҠ” кІ°көӯ мң„м„ұмқҳ нғҗм§Җ мҲ«мһҗк°Җ мҰқк°Җн•ҳлҠ” кІ°кіјлЎң мқҙм–ҙ진лӢӨ. мң„м„ұмқ„ 4к°ң мқҙмғҒ к°җм§Җн•ң мҲңк°„л¶Җн„° 비көҗм Ғ м •нҷ•н•ң TOD(=UTC)к°Җ мғқм„ұлҗҳл©°, C/NO(Carrier To Noise Ratio, 10log(S/NO))к°’ нҷ•мқёмқ„ нҶөн•ҙ мҲҳм№ҳм ҒмңјлЎң G/T Ratio к°ңм„ лҗҳм—ҲлҠ”м§Җ нҷ•мқён•ңлӢӨ[11].
3.2 мӢңн—ҳ мЎ°кұҙ
мң„м„ұмқҙ л§Ө мҲңк°„л§ҲлӢӨ мӣҖм§Ғмқҙкі мһҲкё° л•Ңл¬ём—җ GPS м„ұлҠҘ нҷ•мқёмӢңн—ҳмқҖ лҸҷмқјн•ң мӢңк°„м—җ лҸҷмӢңм—җ мҲҳн–үлҗҳм–ҙм•ј н•ҳлӮҳ н•ӯкіөкё°м—җ мһҘм°©лҗң лҸҷмқј GPS м•Ҳн…ҢлӮҳлҘј мӮ¬мҡ©н•ҙм•ј н•ҳкё° л•Ңл¬ём—җ мӢңк°„мқ„ лӮҳлҲ м„ң мӢңн—ҳмқ„ 진н–үн•ҳлҗҳ мӢңн—ҳ к°„ мӢңк°„м°ЁмқҙлҠ” к°ҖлҠҘн•ң 짧кІҢ н•ңлӢӨ. мӢңн—ҳмқҖ м„ұлҠҘ кІҖмҰқм—җ н•„мҡ”н•ң мӨ‘мҡ” н•ӯлӘ©л“Өмқ„ мқјм • мӢңк°„ к°„кІ©мңјлЎң м ҖмһҘн•ҳкі м¶”нӣ„ 비көҗ к°ҖлҠҘн•ҳлҸ„лЎқ м¶ңл Ҙн• мҲҳ мһҲмңјл©° мқҙм „ 추м Ғ мқҙл Ҙмқ„ м§Җмҡ°кі л§ӨлІҲ мғҲлЎӯкІҢ GPS мң„м„ұмқ„ 추м Ғн•ҳлҠ” Cold Start кё°лҠҘмқ„ к°Җм§Җкі мһҲлҠ” лҸ…лҰҪм Ғмқё GPS мҲҳмӢ кё°лҘј мӮ¬мҡ©н•ңлӢӨ.
3.3 мӢңн—ҳ кө¬м„ұ л°Ҹ л°©лІ•
Fig. 2лҠ” <н”јм•„мӢқлі„мһҘ비 м„ұлҠҘк°ңлҹү мӮ¬м—…> 진н–ү к°„, н”јм•„мӢқлі„мһҘ비м—җ TODлҘј м—°лҸҷн•ҳкі к·ё м„ұлҠҘмқ„ мӢңн—ҳн•ң л°©лІ•мңјлЎң SATURN л¬ҙм „кё°мҷҖ TOD м—°лҸҷлҸ„ лҸҷмқјн•ң л°©лІ•мңјлЎң мӢңн—ҳмқҙ к°ҖлҠҘн•ҳлӢӨ.
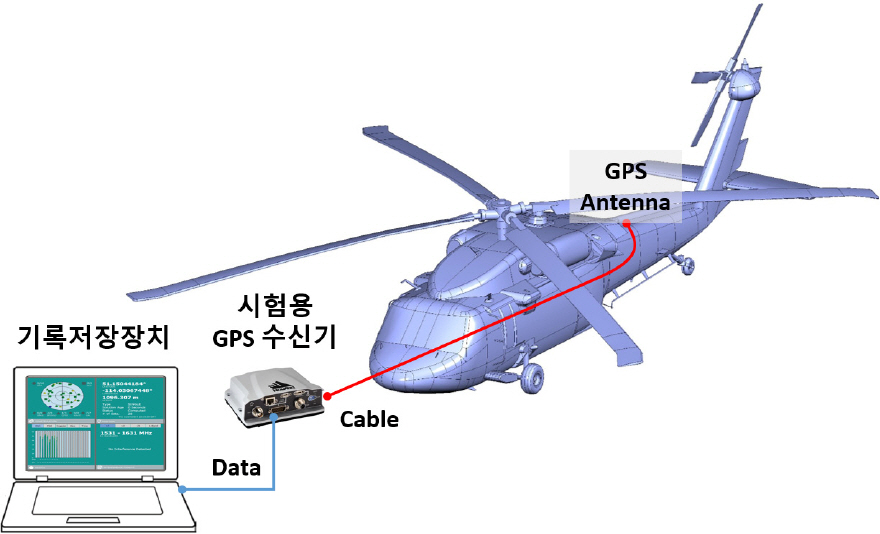
GPS м•Ҳн…ҢлӮҳк°Җ мң„м„ұмқ„ 추м Ғн• мҲҳ мһҲлҠ” нғҒ нҠёмқё м•јмҷё кіөк°„м—җ н•ӯкіөкё°лҘј мң„м№ҳмӢңнӮЁ нӣ„, к°ңмЎ° м „ GPS м•Ҳн…ҢлӮҳм—җ м—°кІ°лҗң Cableмқ„ мӢңн—ҳмҡ© GPS мҲҳмӢ кё°м—җ мһ…л Ҙн•ҳкі , кё°лЎқм ҖмһҘмһҘм№ҳлҘј нҶөн•ҙ м„ұлҠҘкІҖмҰқм—җ н•„мҡ”н•ң мЈјмҡ” н•ӯлӘ©л“Өмқ„ 5분간 кё°лЎқн•ңлӢӨ. кё°лЎқмқҙ мҷ„лЈҢлҗҳл©ҙ мӢңн—ҳмҡ© GPS мҲҳмӢ кё°мқҳ Cold Startкё°лҠҘмқ„ нҷңм„ұнҷ” нӣ„, м ңм•Ҳлҗң мһҗлҸҷ TOD м—°лҸҷ л°©м•Ҳм—җ л”°лқј н•ӯкіөкё° к°ңмЎ°лҘј мҷ„лЈҢн•ң нӣ„ SATURN л¬ҙм „кё°м—җ мһ…л ҘлҗҳлҠ” Cable м¶ңл Ҙмқ„ мёЎм •мҡ© GPS мҲҳмӢ кё°м—җ м—°кІ°н•ҳм—¬ мӢңн—ҳмқ„ мһ¬ мҲҳн–үн•ңлӢӨ.
3.4 мӢңн—ҳ кІ°кіј
<н”јм•„мӢқлі„мһҘ비 м„ұлҠҘк°ңлҹү мӮ¬м—…> 진н–ү к°„ н”јм•„мӢқлі„мһҘ비мҷҖ TOD м—°лҸҷ к°ңмЎ° м „/нӣ„ мӢңн—ҳкІ°кіјлҠ” лӢӨмқҢ Table 4мҷҖ к°ҷлӢӨ.
TableВ 4.
Test results before and after modification
мӢңн—ҳм—җ мӮ¬мҡ©н•ң GPS м•Ҳн…ҢлӮҳлҠ” L1, L2 мұ„л„җмқ„ лӘЁл‘җ мҲҳмӢ н•ҳл©°, мӢңн—ҳмҡ© GPS мҲҳмӢ кё°лҠ” Novatel зӨҫмқҳ PWRPAK7мқ„ мӮ¬мҡ©н•ҳмҳҖкі , к°ңмЎ° м „/нӣ„ 5분간м—җ нғҗм§Җлҗң лӘЁл“ мң„м„ұм—җ лҢҖн•ң C/NOк°’кіј нғҗм§Җ мң„м„ұмҲҳмқҳ нҸүк· к°’мқ„ кё°лЎқн•ҳмҳҖлӢӨ. к°ңмЎ° м „/нӣ„мқҳ мӢңн—ҳ мӢңк°„мқҳ м°ЁмқҙлҠ” м•Ҫ 39분мқҙлӢӨ.
м ңм•Ҳлҗң л°©лІ•мңјлЎң к°ңмЎ°лҗң SATURN л¬ҙм „кё° мһ…л ҘкІҪлЎңм—җм„ңмқҳ нғҗм§Җ мң„м„ұмҲҳ л°Ҹ C/NOк°’мқҖ ліҖнҷ”к°Җ нҷ•мқёлҗң л°ҳл©ҙ, к°җмҮ кё°лҘј мӮ¬мҡ©н•ҳм—¬ к°ңмЎ° м „/нӣ„ мқҙл“қмқ„ лҸҷмқјн•ҳкІҢ н•ң кё°мЎҙ н•ӯкіөкё° GPS мҲҳмӢ кё° кІҪлЎңм—җм„ңлҠ” к°ңмЎ° м „/нӣ„к°Җ лҸҷмқјн•ҳмҳҖлӢӨ. лҳҗн•ң мӢңн—ҳмҡ© GPS мҲҳмӢ кё°к°Җ лӘЁл“ GNSS мң„м„ұмқ„ 추м Ғн•ҳлҠ” кіјм •м—җм„ң GPSмқҳ мұ„л„җ мЈјнҢҢмҲҳмҷҖ мқём ‘н•ң GLONASS мӢ нҳёк°Җ н•ӯкіөкё°м—җ мһҘм°©лҗң GPS м•Ҳн…ҢлӮҳлЎңл¶Җн„° м Ғм Ҳн•ң нҢЁн„ҙмқҙл“қмқ„ м–»м§Җ лӘ»н•ң мғҒнғңм—җм„ң C/NO к°’мқ„ м—°мӮ°н•ҳмҳҖкі , мқҙлҠ” мөңлҢҖ л°Ҹ нҸүк· нғҗм§Җмқҳ кІҪмҡ° GPS л§Ңмқ„ кі л Өн•ң кІҪмҡ°м—җ 비н•ҙ GLONASSлҘј к°ҷмқҙ кі л Өн•ң кІҪмҡ° C/NOк°’мқҙ л–Ём–ҙм§ҖлҠ” кІ°кіјлҘј л§Ңл“Өм–ҙ лӮҙкі мһҲлӢӨ.
Table 4м—җм„ң к°ңмЎ° м „ мөңмҶҢ нғҗм§Җ мң„м„ұмҲҳлҘј ліҙл©ҙ мӢңн—ҳмҡ© GPSмҲҳмӢ кё°м—җм„ңлҠ” GPS мң„м„ұмқ„ 2к°ң к№Ңм§Җл§Ң 추м Ғн•ң л°ҳл©ҙм—җ кё°мЎҙ н•ӯкіөкё°мқҳ GPS мҲҳмӢ кё°лҠ” к°ңмЎ° м „/нӣ„ лҸҷмқјн•ҳкІҢ мң„м„ұмқ„ 4к°ң к№Ңм§Җ 추м Ғ н•ң кІғмқ„ нҷ•мқё н• мҲҳ мһҲлӢӨ. мқҙлҠ” мқјл°ҳм ҒмңјлЎң GPS мҲҳмӢ кё°к°Җ мқҙм „ мң„м„ұ 추м Ғмқҙл Ҙмқ„ к°Җм§Җкі мһҲлҠ” кІҪмҡ°, лҚ” л№ лҘҙкІҢ мң„м„ұ нғҗм§Җк°Җ к°ҖлҠҘн•ҳлӢӨлҠ” м җм—җм„ң м°Ёмқҙк°Җ л°ңмғқн•ң кІғмңјлЎң нҢҗлӢЁн• мҲҳ мһҲлӢӨ.лӢӨл§Ң к°ңмЎ° нӣ„ мӢңн—ҳмҡ© GPS мҲҳмӢ кё°к°Җ мң„м„ұмқ„ мөңмҶҢ 9к°ң к№Ңм§Җ 추м Ғн•ң кІғкіј н•ӯкіөкё°мқҳ GPS мҲҳмӢ кё°к°Җ мӢңк°„кіј мўҢн‘ң м—°мӮ°м—җ н•„мҡ”н•ң мөңмҶҢ мң„м„ұмҲҳмқё 4к°ң к№Ңм§Җл§Ң 추м Ғн•ң мғҒнҷ©мқ„ кі л Өн•ҳл©ҙ, л Ҳкұ°мӢң н•ӯкіөкё°л“Өмқҳ GPSм•Ҳн…ҢлӮҳк°Җ л°ҳл“ңмӢң MOPS кё°мӨҖмңјлЎң к°ңмЎ°лҗҳм–ҙм•ј н• н•„мҡ”м„ұмқ„ нҷ•мқён• мҲҳ мһҲлӢӨ.
мӢңн—ҳкІ°кіјлҘј мӮҙнҺҙліҙкё° мң„н•ҙ мӢқ (2)лҘј м°ёкі н•ҳм—¬ DO-301м—җм„ң м ңм•Ҳн•ҳлҠ” S/NOмқҙ мөңмҶҢк°’мқё кІҪмҡ°(G/T Ratio 31.6 dB/Kмқё кІҪмҡ°)м—җ лҢҖн•ҙм„ң C/NOлҘј кі„мӮ°н•ҙ ліҙл©ҙ, вҲ’128.5 dBm + 198.6 dBm/Hz/K вҲ’31.6 dB/K = 38.5 dB/Hz к°Җ лӮҳмҳЁлӢӨ. вҲ’128.5 dBmмқҖ IS-GPS-200м—җм„ң м •мқҳн•ң к°’мңјлЎң мң„м„ұм—җм„ң мҶЎмӢ н•ң мӢ нҳёк°Җ м§ҖмғҒм—җм„ң мөңмҶҢ мқҙ к°’мңјлЎң мёЎм •лҗҳлҸ„лЎқ н•ҙм•ј н•ңлӢӨлҠ” кё°мӨҖк°’мқҙл©° мӢқ (2)м—җм„ң SMIN к°’м—җ н•ҙлӢ№н•ңлӢӨ. м§ҖмғҒм—җм„ң мёЎм •н•ң к°’мқҙ мқҙ к°’ліҙлӢӨ мһ‘мқҖ кІҪмҡ°м—җлҠ” мң„м„ұм—җм„ң мҶЎмӢ н•ҳлҠ” мӢ нҳёмқҳ м „л Ҙмқ„ мҰқк°Җн•ңлӢӨ. ліјмё л§Ң мғҒмҲҳ kлҘј log м·Ён•ҳкі 10мқ„ кіұн•ң кІҪмҡ° 198.6 dBm/Hz/Kк°Җ кі„мӮ°лҗңлӢӨ[5,10,12].
<н”јм•„мӢқлі„мһҘ비 м„ұлҠҘк°ңлҹү мӮ¬м—…>мқ„ нҶөн•ҙ Table 4мқҳ н•ӯкіөкё°мқҳ G/T RatioлҠ” вҲ’31.55 dB/KлЎң м„Өкі„лҗҳм—Ҳмңјл©°, н•ҙлӢ№ м„Өкі„м№ҳм—җ л”°лҘё кё°лҢҖ C/NO к°’мқҖ м•һм„ңмҷҖ к°ҷмқҖ л°©мӢқмңјлЎң кі„мӮ°н•ҳл©ҙ, 38.55 dB/Hzк°Җ кі„мӮ°лҗңлӢӨ. Table 4мқҳ к°ңмЎ° нӣ„ GPSмҷҖ GLONASSлҘј н•Ёк»ҳ кі л Өн•ң кІҪмҡ°мқҳ C/NO нҸүк· мқ„ нҷ•мқён•ҳл©ҙ 38.58 dB/HzлЎң мқҙлҠ” м•һм„ң мӢқ (2)лҘј мӮ°мҲ м ҒмңјлЎң кі„мӮ°н•ң мөңмҶҢ C/NO к°’кіј л§Өмҡ° мң мӮ¬н•ң к°’мқҙл©°, GPSл§Ңмқ„ кі л Өн•ң кІҪмҡ°мқё 39.35 dB/HzлЎң кі„мӮ°н•ҙлҸ„ 0.8 dBмқҳ л§Өмҡ° к·јмҶҢн•ң м°Ёмқҙк°Җ лӮҳлҠ” к°’мқҙлӢӨ. мқҙ кІ°кіјлҘј нҶөн•ҙ н•ҙлӢ№ н•ӯкіөкё°мқҳ GPSм•Ҳн…ҢлӮҳ л°Ҹ н•ҳмң„ кө¬м„ұн’Ҳл“Өм—җ лҢҖн•ҳм—¬ G/T RatioлҘј л§ҢмЎұмӢңнӮӨкё° мң„н•ң к°ңмЎ°к°Җ м Ғм Ҳн•ҳкІҢ мқҙлЈЁм–ҙмЎҢмқҢмқ„ нҶөкі„ л°Ҹ мӮ°мҲ м ҒмңјлЎң нҷ•мқён• мҲҳ мһҲлӢӨ.
кІ° лЎ
ліё л…јл¬ёмқ„ нҶөн•ҙ мҡ°лҰ¬ кө°мқҳ м°Ём„ёлҢҖ кіөм§ҖнҶөмӢ л¬ҙм „кё°к°Җ лҗ SATURN л¬ҙм „кё°мқҳ мҡҙмҡ©нҸӯмқ„ л„“нһҲкё° мң„н•ң мһҗлҸҷ TOD м—°лҸҷ л°©м•Ҳм—җ лҢҖн•ҳм—¬ м ңмӢңн•ҳмҳҖлӢӨ.
лЁјм Җ м§ҖмғҒ лҳҗлҠ” нғҖ н•ӯкіөкё°мқҳ мӨ‘кі„ м—ӯн• мқ„ нҷңмҡ©н•ң TOD мҲҳмӢ мқҳ л¬ём ңм җкіј GPS м•Ҳн…ҢлӮҳлҘј нҶөн•ҙ мһҗлҸҷ TOD лҘј м—°лҸҷн•ҳлҠ” л°©мӢқмқҳ мһҘм җмқ„ м ңмӢңн•ҳмҳҖкі , GPSм•Ҳн…ҢлӮҳ к°ңмЎ°лҘј мң„н•ң мқҙлЎ м Ғ л°°кІҪмқё мөңмҶҢ мҡҙмҡ© м„ұлҠҘ к·ңкІ©кіј <н”јм•„мӢқлі„мһҘ비 м„ұлҠҘк°ңлҹү мӮ¬м—…>к°„ мҢ“мқҖ м„Өкі„кІҪн—ҳмқ„ нҷңмҡ©н•ҳм—¬ SATURN л¬ҙм „кё° мһҗлҸҷ TOD м—°лҸҷм•Ҳмқ„ лҸ„м¶ңн•ҳмҳҖлӢӨ. лҳҗн•ң м—°лҸҷм•Ҳмқҳ н•өмӢ¬мқё G/T Ratio к°ңм„ мқ„ нҷ•мқён• мҲҳ мһҲлҠ” кІҖмҰқлҗң мӢңн—ҳл°©м•Ҳмқ„ м ңмӢңн•ҳмҳҖкі , мӢңн—ҳкІ°кіј м„Өкі„кіјм •м—җм„ң кё°лҢҖн•ң к°’мқ„ лӢ¬м„ұн•Ёмқ„ нҶөкі„ л°Ҹ мӮ°мҲ м Ғмқё л°©лІ•мңјлЎң нҷ•мқён•ҳмҳҖлӢӨ.
ліё м—°кө¬м—җм„ң м ңмӢңн•ң н•ӯкіөкё° м„ұлҠҘк°ңлҹү л°Ҹ м„ұлҠҘкІҖмҰқ л°©м•Ҳмқ„ м°Ём„ёлҢҖ кіөм§ҖнҶөмӢ л¬ҙм „кё° м„ұлҠҘк°ңлҹүм—җ м Ғмҡ©н•ҳл©ҙ мӢ к·ң GPS м•Ҳн…ҢлӮҳ мһҘм°© м—Ҷмқҙ кё°мЎҙ GPS м•Ҳн…ҢлӮҳлҘј мөңмҶҢн•ңмңјлЎң к°ңмЎ°н•ЁмңјлЎңмҚЁ GPS мӢ нҳёк°Җ лӢҝлҠ” м „м„ёкі„ м–ҙл””м—җм„ңл“ нҡЁкіјм ҒмңјлЎң SATURN л¬ҙм „кё°лҘј мҡҙмҡ©н• мҲҳ мһҲмқ„ кІғмңјлЎң кё°лҢҖлҗңлӢӨ.




