



м„ң лЎ
м „мһҗнҢҢлҘј л°ҳмӮ¬ лҳҗлҠ” л°©мӮ¬н•ҳлҠ” м „л°©н‘ңм Ғм—җ лҢҖн•ң нғҗм§Җ л°Ҹ 추м ҒмқҖ кө°мӮ¬м ҒмңјлЎң к°ҖмһҘ мӨ‘мҡ”н•ң кё°лҠҘ мӨ‘ н•ҳлӮҳмқҙлӢӨ. лӘЁл…ёнҺ„мҠӨ кё°лІ•мқҖ м „л°©н‘ңм Ғм—җ лҢҖн•ң л°©н–Ҙ нғҗм§Җм—җ к°ҖмһҘ л„җлҰ¬ мӮ¬мҡ©лҗҳлҠ” кё°лІ•мңјлЎңм„ң, лҢҖл¶Җ분мқҳ кІҪмҡ° 비н–үмІҙмқҳ л…ёмҰҲл¶Җм—җ нҸүл©ҙл°°м—ҙм•Ҳн…ҢлӮҳ лҳҗлҠ” м№ҙм„ёк·ёл Ҳмқё м•Ҳн…ҢлӮҳ л“ұмқ„ л°°м№ҳн•ҳм—¬ мҡҙмҡ©н•ңлӢӨ. мғҒкё°н•ң м•Ҳн…ҢлӮҳл“ӨмқҖ мўҒмқҖ л№” нҸӯ л°Ҹ лҶ’мқҖ м•Ҳн…ҢлӮҳ мқҙл“қмқ„ мң„н•ҳм—¬ нғ‘мһ¬ к°ҖлҠҘн•ң лІ”мң„ лӮҙм—җм„ң мөңлҢҖн•ң нҒ¬кІҢ м ңмһ‘лҗҳлҜҖлЎң, мқҙлҹ¬н•ң м•Ҳн…ҢлӮҳл“Өмқҙ мһҘм°©лҗҳлҠ” кІҪмҡ° 비н–үмІҙ л…ёмҰҲл¶Җмқҳ нҷңмҡ©м—җ нҒ° м ңм•Ҫмқҙ мЎҙмһ¬н•ңлӢӨ. л…ёмҰҲл¶Җмқҳ нҷңмҡ©мқ„ мң„н•ң лҢҖм•ҲмңјлЎңм„ң, м•Ҳн…ҢлӮҳлҘј л…ёмҰҲл¶Җ мҷёкіҪмқҙлӮҳ 비н–үмІҙмқҳ лҸҷмІҙ мёЎл©ҙм—җ л°°м—ҙн•ң лӢЁмӣҗнҳ•л°°м—ҙм•Ҳн…ҢлӮҳ(single-ring circular array antenna)лҘј кө¬м„ұн•ҳм—¬ лӘЁл…ёнҺ„мҠӨ кё°лІ•мқ„ м Ғмҡ©н• мҲҳ мһҲлӢӨ. н•ҳм§Җл§Ң л°°м—ҙмқ„ кө¬м„ұн•ҳлҠ” м•Ҳн…ҢлӮҳ мҲҳк°Җ л§ҺлӢӨл©ҙ л°°м№ҳм—җ м–ҙл ӨмӣҖмқҙ мЎҙмһ¬н• лҝҗл§Ң м•„лӢҲлқј мӢңмҠӨн…ңмқҳ ліөмһЎлҸ„к°Җ мҰқк°Җн•ҳл©°, л°°м—ҙмқ„ кө¬м„ұн•ҳлҠ” м•Ҳн…ҢлӮҳ мҲҳк°Җ м ҒлӢӨл©ҙ л°°м—ҙм•Ҳн…ҢлӮҳмқҳ л№” нҸӯ л°Ҹ м•Ҳн…ҢлӮҳ л¶Җм—Ҫ мӨҖмң„к°Җ мҰқк°Җн•ҳм—¬ мӣҗнҷңн•ң л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғм—җ м–ҙл ӨмӣҖмқҙ мһҲмқ„ мҲҳ мһҲлӢӨ[1].
мқҙм—җ лӢЁмӣҗнҳ•л°°м—ҙм•Ҳн…ҢлӮҳмқҳ кІҪмҡ°, лӘЁл…ёнҺ„мҠӨ кё°лІ•ліҙлӢӨлҠ” к°„м„ӯкі„(interferometer) л°©мӢқмңјлЎң м „л°©н‘ңм Ғм—җ лҢҖн•ң л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғмқ„ мҲҳн–үн•ҳлҠ” кІғмқҙ мң лҰ¬н•ҳлӢӨ. к°„м„ӯкі„лҠ” к°„м„ӯкі„лҘј кө¬м„ұн•ҳлҠ” м•Ҳн…ҢлӮҳ мҶҢмһҗ к°„ мқҙкІ©кұ°лҰ¬к°Җ нҒҙмҲҳлЎқ мҡ°мҲҳн•ң к°ҒлҸ„ 추м Ғ м •нҷ•лҸ„лҘј к°Җм§ҖлӮҳ, м•Ҳн…ҢлӮҳ к°„ мқҙкІ©кұ°лҰ¬к°Җ л°ҳ нҢҢмһҘ мқҙмғҒмқј кІҪмҡ° н‘ңм Ғмқҳ к°ҒлҸ„мҷҖ мң„мғҒм°Ё к°„ мқјлҢҖмқј лҢҖмқ‘ кҙҖкі„к°Җ м„ұлҰҪн•ҳм§Җ м•ҠлҠ” лӘЁнҳём„ұ л¬ём ңк°Җ л°ңмғқн• мҲҳ мһҲлӢӨ. мқҙмҷҖ к°ҷмқҙ к°„м„ӯкі„лҠ” к°ҒлҸ„ 추м Ғ м •нҷ•лҸ„мҷҖ лӘЁнҳём„ұ(ambiguity) л¬ём ң к°„ trade-off кҙҖкі„к°Җ мЎҙмһ¬н•ҳлҜҖлЎң[2], мҡ°мҲҳн•ң к°ҒлҸ„ 추м Ғ м •нҷ•лҸ„лҘј м–»кё° мң„н•ҙм„ңлҠ” лӘЁнҳём„ұмқҳ н•ҙкІ°мқҙ н•„мҲҳм ҒмқҙлӢӨ. лӘЁнҳём„ұ н•ҙкІ°мқ„ мң„н•ҙм„ңлҠ” лҸҷмқј м„ мғҒм—җ мң„м№ҳн•ң м„ё к°ң мқҙмғҒмқҳ м•Ҳн…ҢлӮҳлҘј мӮ¬мҡ©н•ҳкұ°лӮҳ[2], 진нҸӯ 비көҗ кё°лІ•(amplitude comparison)мқ„ мӮ¬мҡ©н•ҳлҠ” л°©м•Ҳ[3] л“ұмқҙ м ңм•Ҳлҗҳм–ҙмҷ”лӢӨ. лҸҷмқј м„ мғҒм—җ мң„м№ҳн•ң м„ё к°ң мқҙмғҒмқҳ м•Ҳн…ҢлӮҳлҘј мӮ¬мҡ©н•ҳм—¬ м „л°©н‘ңм Ғмқҳ л°©н–Ҙмқ„ нғҗм§Җн•ҳлҠ” к°„м„ӯкі„ мӢңмҠӨн…ңмқҖ, лӢӨм„Ҝ к°ңмқҳ м•Ҳн…ҢлӮҳлҘј мӢӯмһҗк°Җ нҳ•нғңлЎң л°°м—ҙн•ң нӣ„ мўҢ/мҡ°мқҳ м•Ҳн…ҢлӮҳмҷҖ мӨ‘м•ҷм—җ мң„м№ҳн•ң м•Ҳн…ҢлӮҳ мҲҳмӢ мӢ нҳёмқҳ мң„мғҒмқ„ мқҙмҡ©н•ҳм—¬ н‘ңм Ғмқҳ л°©мң„к°Ғмқ„ лҸ„м¶ңн•ҳкі , мғҒ/н•ҳмқҳ м•Ҳн…ҢлӮҳмҷҖ мӨ‘м•ҷм—җ мң„м№ҳн•ң м•Ҳн…ҢлӮҳ мҲҳмӢ мӢ нҳёмқҳ мң„мғҒмқ„ мқҙмҡ©н•ҳм—¬ н‘ңм Ғмқҳ кі к°Ғмқ„ лҸ„м¶ңн•ңлӢӨ[4]. мқҙлҠ” л°°м—ҙ мӨ‘м•ҷмқҳ м•Ҳн…ҢлӮҳлҘј н•„мҡ”лЎң н•ҳлҜҖлЎң л…ёмҰҲл¶Җ нҷңмҡ© лӘ©м Ғм—җлҠ” м Ғн•©н•ҳм§Җ м•ҠлӢӨ.
진нҸӯ 비көҗ кё°лІ•мқҳ кІҪмҡ°, 2м°Ёмӣҗ нҸүл©ҙмғҒм—җм„ңлҠ” 진нҸӯ 비көҗ кІ°кіјк°’кіј н‘ңм Ғмқҳ к°ҒлҸ„ мӮ¬мқҙм—җ м„ нҳ•м Ғмқё кҙҖкі„к°Җ м„ұлҰҪн•ҳлҜҖлЎң мқҙлҘј мқҙмҡ©н•ҳм—¬ нҺёлҰ¬н•ҳкІҢ к°„м„ӯкі„ лӘЁнҳём„ұ л¬ём ңлҘј н•ҙкІ°н• мҲҳ мһҲмңјлӮҳ, 3м°Ёмӣҗ кіөк°„мғҒм—җм„ңлҠ” м„ нҳ•м Ғмқё кҙҖкі„к°Җ м„ұлҰҪн•ҳм§Җ м•ҠмңјлҜҖлЎң м Ғмҡ©м—җ л§ҺмқҖ н•ңкі„к°Җ мЎҙмһ¬н•ңлӢӨ. мқҙм—җ лҢҖн•ң мғҒм„ён•ң м„ӨлӘ…мқҖ 2.2м Ҳм—җм„ң кё°мҲ н•ңлӢӨ.
ліё л…јл¬ём—җм„ңлҠ” кіөк°„л¶„н• н…Ңмқҙлё”мқҳ к°ңл…җмқ„ м ңм•Ҳн•ҳкі мқҙлҘј мқҙмҡ©н•ҳм—¬ лӢЁмӣҗнҳ•л°°м—ҙм•Ҳн…ҢлӮҳ м „л°©мқҳ 3м°Ёмӣҗ кіөк°„м—җ лҢҖн•ң к°„м„ӯкі„ лӘЁнҳём„ұ л¬ём ңлҘј н•ҙкІ°н•ҳлҠ” л°©м•Ҳм—җ лҢҖн•ҳм—¬ кё°мҲ н•ңлӢӨ. мқҙлҘј мң„н•ҙ 2мһҘм—җм„ңлҠ” к°„м„ӯкі„ л°Ҹ 진нҸӯ 비көҗ кё°лІ•м—җ лҢҖн•ң к°„лӢЁн•ң м„ӨлӘ…кіј м ңн•ңм җм—җ лҢҖн•ҳм—¬ м„ңмҲ н•ҳкі , 3мһҘм—җм„ңлҠ” кіөк°„л¶„н• н…Ңмқҙлё”мқҳ к°ңл…җкіј мқҙлҘј мқҙмҡ©н•ң лӘЁнҳём„ұ н•ҙкІ° л°©м•Ҳм—җ лҢҖн•ҳм—¬ кё°мҲ н•ңлӢӨ. лӢӨмқҢмңјлЎң 4мһҘм—җм„ңлҠ” лӢЁмӣҗнҳ•л°°м—ҙм•Ҳн…ҢлӮҳм—җ м ңм•Ҳн•ң л°©лІ•мқ„ м Ғмҡ©н•ң кІ°кіјлҘј кё°мҲ н•ңлӢӨ.
л°°м—ҙм•Ҳн…ҢлӮҳ кё°л°ҳ л°©н–Ҙнғҗм§Җ кё°лІ•
2.1 к°„м„ӯкі„
к°„м„ӯкі„лҠ” л‘җ к°ң мқҙмғҒмқҳ мҲҳмӢ м•Ҳн…ҢлӮҳлҘј мқҙмҡ©н•ҳм—¬ н‘ңм Ғмқҳ л°©н–Ҙмқ„ лҸ„м¶ңн•ҳлҠ” мӢңмҠӨн…ңмңјлЎңм„ң, мҲҳмӢ мӢ нҳё к°„мқҳ мң„мғҒм°ЁлҘј мқҙмҡ©н•ҳм—¬ н‘ңм Ғмқҳ к°ҒлҸ„лҘј кі„мӮ°н•ңлӢӨ[2]. Fig. 1кіј к°ҷмқҙ л„Ө к°ңмқҳ м•Ҳн…ҢлӮҳлҘј л°°м№ҳн•ң л°°м—ҙм•Ҳн…ҢлӮҳм—җм„ң, м•Ҳн…ҢлӮҳ к°„ мң„мғҒм°ЁмҷҖ н‘ңм Ғмқҳ л°©мң„к°Ғ ОёAZ, кі к°Ғ ОёEL к°„мқҳ кҙҖкі„лҠ” мӢқ (1), (2)мҷҖ к°ҷлӢӨ. м•„лһҳ мӢқм—җм„ң П•UDлҠ” U/D м•Ҳн…ҢлӮҳ к°„мқҳ мң„мғҒм°Ё, П•RLлҠ” R/L м•Ҳн…ҢлӮҳ к°„мқҳ мң„мғҒм°ЁлҘј мқҳлҜён•ҳл©°, DUD, DRLлҠ” к°Ғк°Ғ U/D, R/L м•Ҳн…ҢлӮҳ к°„ мқҙкІ©кұ°лҰ¬мқҙлӢӨ.

мқҙ л•Ң, к°„м„ӯкі„лҘј мқҙмҡ©н•ҳм—¬ лҸ„м¶ңн•ң н‘ңм Ғ к°ҒлҸ„мқҳ RMS к°ҒлҸ„ мҳӨм°ЁлҠ” мӢқ (3)кіј к°ҷмқҙ н‘ңнҳ„лҗҳл©°[5], мқҙлЎңл¶Җн„° мЈјм–ҙ진 SNRм—җм„ң м•Ҳн…ҢлӮҳ к°„ мқҙкІ©кұ°лҰ¬к°Җ нҒҙмҲҳлЎқ мҡ°мҲҳн•ң к°ҒлҸ„ 추м Ғ м •нҷ•лҸ„лҘј лӮҳнғҖлғ„мқ„ м•Ң мҲҳ мһҲлӢӨ.
н•ҳм§Җл§Ң мӢқ (1), (2)лЎңл¶Җн„° м•Ҳн…ҢлӮҳ к°„ мқҙкІ©кұ°лҰ¬к°Җ л°ҳ нҢҢмһҘ(О»/2) мқҙмғҒмқј кІҪмҡ°, н‘ңм Ғмқҳ к°ҒлҸ„мҷҖ мң„мғҒм°Ё к°„ мқјлҢҖмқј лҢҖмқ‘ кҙҖкі„к°Җ м„ұлҰҪн•ҳм§Җ м•ҠлҠ” лӘЁнҳём„ұ л¬ём ңк°Җ л°ңмғқ н• мҲҳ мһҲмқҢмқ„ мүҪкІҢ мҳҲмёЎн• мҲҳ мһҲмңјлҜҖлЎң, мҡ°мҲҳн•ң к°ҒлҸ„ 추м Ғ м •нҷ•лҸ„лҘј м–»кё° мң„н•ҙм„ңлҠ” лӘЁнҳём„ұ л¬ём ңм—җ лҢҖн•ң лҢҖмұ…мқҙ н•„мҡ”н•ҳлӢӨ.
к°„м„ӯкі„лҘј мқҙмҡ©н•ҳм—¬ лӘЁнҳём„ұ л¬ём ңлҘј н•ҙкІ°н•ҳкё° мң„н•ҙм„ңлҠ” м„ңлЎң лӢӨлҘё к°„кІ©мқ„ к°–лҸ„лЎқ м„ё к°ң мқҙмғҒмқҳ м•Ҳн…ҢлӮҳлҘј л°°м—ҙн•ҳкі мғҒнҳё мң„мғҒм°ЁлҘј 비көҗн•ҳлҠ” л°©лІ•[4]мқҙ мһҲмңјлӮҳ, мқҙ л°©лІ•мқҖ л°°м—ҙ мӨ‘м•ҷм—җ мң„м№ҳн•ҳлҠ” м•Ҳн…ҢлӮҳлЎң мқён•ҳм—¬ 비н–үмІҙ л…ёмҰҲл¶Җ нҷңмҡ©м—җ м ңм•Ҫмқҙ л”°лҘёлӢӨ.
2.2 진нҸӯ 비көҗ кё°лІ•
진нҸӯ 비көҗ кё°лІ•мқҖ л°°м—ҙмқ„ кө¬м„ұн•ҳлҠ” м•Ҳн…ҢлӮҳ мҲҳмӢ мӢ нҳё к°„мқҳ 진нҸӯ(amplitude) 비лҘј мқҙмҡ©н•ҳм—¬ н‘ңм Ғмқҳ к°ҒлҸ„лҘј кі„мӮ°н•ңлӢӨ[3]. мқҙлҘј мң„н•ҙм„ңлҠ” л°°м—ҙмқ„ кө¬м„ұн•ҳлҠ” м•Ҳн…ҢлӮҳм—җ кё°кө¬м Ғ лҳҗлҠ” м „кё°м Ғ л°©лІ•мқ„ нҶөн•ҙ л°°м—ҙмқҳ кё°мӨҖл°©н–Ҙ (boresight) кё°мӨҖмңјлЎң кё°мӣҖк°Ғ(Оёs)мқ„ мЈјм–ҙ к°Ғ м•Ҳн…ҢлӮҳмқҳ мЈј л№” л°©н–Ҙм—җ м°ЁмқҙлҘј л‘”лӢӨ. мқјл°ҳм ҒмңјлЎң 진нҸӯ 비көҗ кё°лІ•мқҖ к°„м„ӯкі„ л°©мӢқм—җ 비н•ҳм—¬ лӮ®мқҖ мҲҳмӨҖмқҳ к°ҒлҸ„ 추м Ғ м •нҷ•лҸ„лҘј лӮҳнғҖлӮҙлӮҳ лӘЁнҳём„ұ л¬ём ңм—җм„ң мғҒлҢҖм ҒмңјлЎң мһҗмң лЎӯлӢӨлҠ” мһҘм җмқ„ к°–лҠ”лӢӨ. мҳҲлҘј л“Өм–ҙ, 2м°Ёмӣҗ нҸүл©ҙмғҒм—җ мқјл ¬лЎң л°°м№ҳлҗң к°Җмҡ°мӢңм•Ҳ(Gaussian) нҢЁн„ҙмқ„ к°–лҠ” л‘җ м•Ҳн…ҢлӮҳ мҲҳмӢ мӢ нҳёмқҳ 진нҸӯ 비мҷҖ н•ҙлӢ№ нҸүл©ҙмғҒм—җ мң„м№ҳн•ң н‘ңм Ғмқҳ к°ҒлҸ„ к°„м—җлҠ” мқјлҢҖмқј лҢҖмқ‘ кҙҖкі„к°Җ мЎҙмһ¬н•ңлӢӨ. л”°лқјм„ң 2м°Ёмӣҗ нҸүл©ҙм—җм„ңлҠ” л‘җ м•Ҳн…ҢлӮҳ мҲҳмӢ мӢ нҳёмқҳ 진нҸӯ 비мҷҖ мң„мғҒм°ЁлҘј н•Ёк»ҳ мқҙмҡ©н•ҳм—¬ н‘ңм Ғмқҳ к°ҒлҸ„лҘј кі„мӮ°н•ЁмңјлЎңмҚЁ к°„м„ӯкі„мқҳ лӘЁнҳём„ұ л¬ём ңлҘј мүҪкІҢ н•ҙкІ°н• мҲҳ мһҲлӢӨ (Fig. 2).
Fig.В 2.
(a) Antenna beam pattern (b) Phase difference and amplitude ratio (D = 2О», Оёs = 20В°, HPBW Оё3 = 80В°)
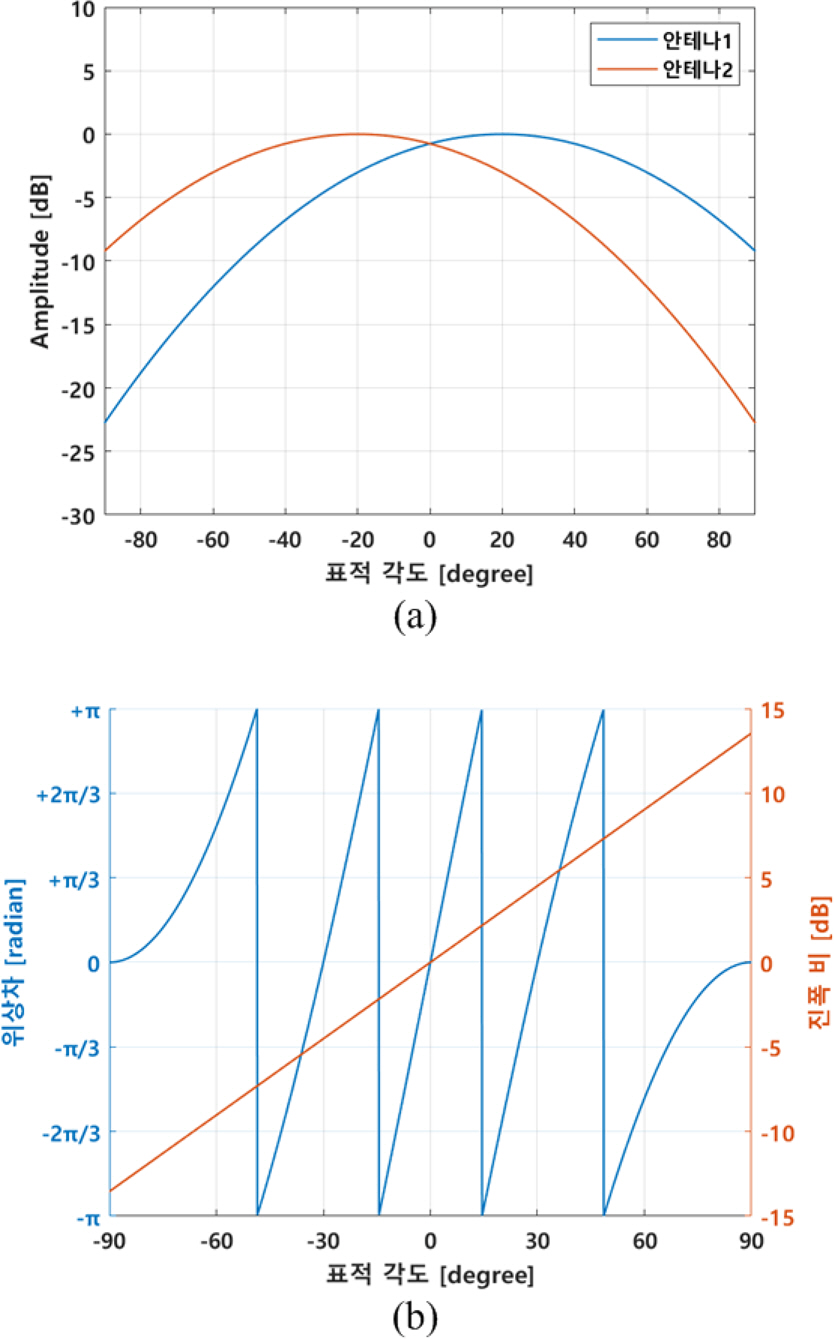
н•ҳм§Җл§Ң н‘ңм Ғмқҙ л°°м—ҙ м „л°© 3м°Ёмӣҗ кіөк°„мғҒм—җ мЎҙмһ¬н• кІҪмҡ°м—җлҠ” мғҒкё°н•ң кҙҖкі„к°Җ м„ұлҰҪн•ҳм§Җ м•ҠлҠ”лӢӨ. Fig. 3мқҖ к°Җмҡ°мӢңм•Ҳ нҢЁн„ҙмқ„ к°–лҠ” л„Ө к°ңмқҳ м•Ҳн…ҢлӮҳлҘј Fig. 1кіј к°ҷмқҙ л°°м—ҙн•ҳмҳҖмқ„ л•Ң, R/L м•Ҳн…ҢлӮҳ мҲҳмӢ мӢ нҳёмқҳ 진нҸӯ 비 a1, U/D м•Ҳн…ҢлӮҳ мҲҳмӢ мӢ нҳёмқҳ 진нҸӯ 비 a2лҘј к°–лҠ” л°©мң„к°Ғ/кі к°Ғ мҢҚмқ„ к°Ғк°Ғ м Ғмғүкіј мІӯмғү м„ мңјлЎң лӮҳнғҖлӮё кІғмқҙлӢӨ.

к·ёлҰјм—җм„ң л°°м—ҙ м „л°© м „л°ҳкө¬(frontal hemisphere) мҳҒм—ӯмқҳ нқ‘мғү мӢӨм„ мқҖ м§Җкө¬мқҳ мң„/кІҪлҸ„мҷҖ мң мӮ¬н•ң нҳ•нғңлЎңмҚЁ, мҲҳнҸүл°©н–Ҙ нқ‘мғү мӢӨм„ мқҖ лҸҷмқј кі к°Ғ, мҲҳм§Ғл°©н–Ҙ нқ‘мғү мӢӨм„ мқҖ лҸҷмқј л°©мң„к°Ғмқ„ к°–лҠ”лӢӨ. лҸҷмқјн•ң 진нҸӯ 비 a2лҘј к°–лҠ” л°©мң„к°Ғ/кі к°Ғ мҢҚ(мІӯмғү мӢӨм„ )л“Өм—җм„ң л°©мң„к°Ғм—җ л”°лқј кі к°Ғ к°’м—җ м°Ёмқҙк°Җ мЎҙмһ¬н•ҳлҠ” мң„ кІ°кіјлЎңл¶Җн„°, 진нҸӯ 비көҗ кё°лІ•мқҖ к°„м„ӯкі„мҷҖлҠ” лӢ¬лҰ¬ мғҒн•ҳ м•Ҳн…ҢлӮҳмқҳ мҲҳмӢ мӢ нҳёл§ҢмңјлЎңлҠ” н‘ңм Ғмқҳ кі к°Ғмқ„ нҠ№м •н• мҲҳ м—ҶмқҢмқ„ м•Ң мҲҳ мһҲлӢӨ. лҳҗн•ң лҸҷмқјн•ң 진нҸӯ 비 a1лҘј к°–лҠ” л°©мң„к°Ғ/кі к°Ғ мҢҚ(м Ғмғү мӢӨм„ ) кІ°кіјлҠ” н‘ңм Ғмқҳ л°©мң„к°Ғкіј 진нҸӯ 비 к°„ кҙҖкі„ м—ӯмӢң лӢЁмҲңн•ҳм§Җ м•ҠмқҢмқ„ лӮҳнғҖлӮёлӢӨ.
кіөк°„л¶„н• н…Ңмқҙлё”мқ„ мқҙмҡ©н•ң л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғ
3.1 кіөк°„л¶„н• мқҳ лӘ©м Ғ
лӢЁмӣҗнҳ•л°°м—ҙм•Ҳн…ҢлӮҳлҘј м Ғмҡ©н•ң л°©н–Ҙнғҗм§Җ мӢңмҠӨн…ңмқҳ м •л°Җн•ң к°ҒлҸ„ 추м Ғмқ„ мң„н•ҙм„ңлҠ” л§Өмҡ° м •л°Җн•ң к°ҒлҸ„ 추м Ғ м •нҷ•лҸ„к°Җ н•„мҡ”н•ҳлҜҖлЎң, лӢЁмӣҗнҳ•л°°м—ҙм•Ҳн…ҢлӮҳлҘј м Ғмҡ©н•ң л°©н–Ҙнғҗм§Җ мӢңмҠӨн…ңмқҖ к°„м„ӯкі„ л°©мӢқмңјлЎң н‘ңм Ғмқҳ л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғмқ„ мҲҳн–үн•ҳлҠ” кІғмқҙ м Ғм Ҳн•ҳлӢӨ. н•ҳм§Җл§Ң мң„мқҳ 2мһҘм—җм„ң кё°мҲ н•ң л°”мҷҖ к°ҷмқҙ, к°„м„ӯкі„мқҳ мҡ°мҲҳн•ң к°ҒлҸ„ 추м Ғ м •нҷ•лҸ„ м„ұлҠҘмқ„ нҷңмҡ©н•ҳкё° мң„н•ҙм„ңлҠ” лӘЁнҳём„ұ л¬ём ңлҘј н•ҙкІ°н•ҙм•јл§Ң н•ңлӢӨ.
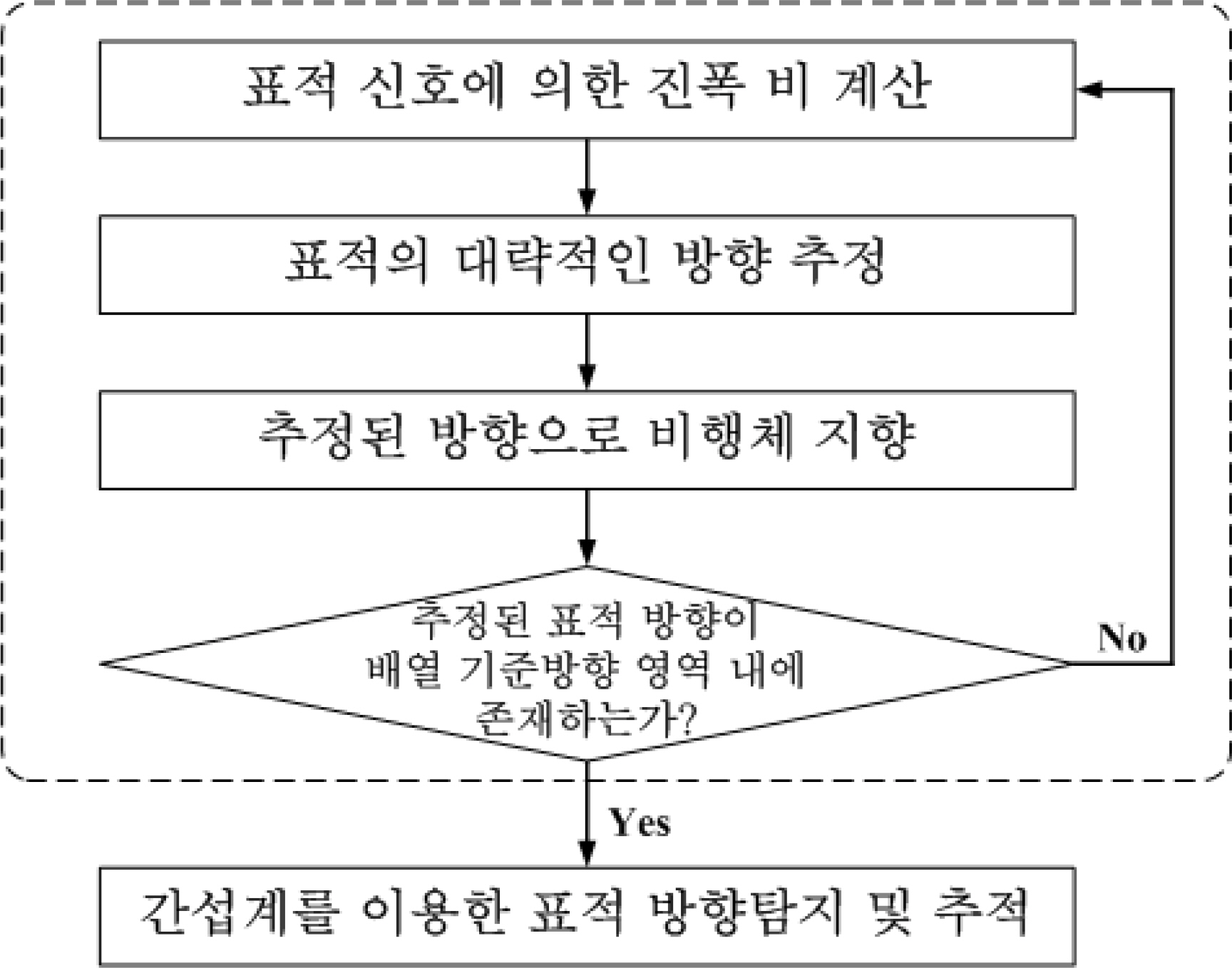
мқҙм—җ ліё л…јл¬ём—җм„ңлҠ” 진нҸӯ 비көҗ кё°лІ•кіј кіөк°„л¶„н• н…Ңмқҙлё”[6]мқ„ мқҙмҡ©н•ҳм—¬ л°°м—ҙ м „л°© 3м°Ёмӣҗ кіөк°„мғҒм—җм„ң к°„м„ӯкі„ лӘЁнҳём„ұмқ„ м ңкұ°н•ҳкі мһҗ н•ңлӢӨ. 2мһҘм—җм„ң м–ёкёүн•ң л°”мҷҖ к°ҷмқҙ л°°м—ҙ м „л°© 3м°Ёмӣҗ кіөк°„мғҒм—җм„ңлҠ” н‘ңм Ғмқҳ л°©мң„к°Ғ/кі к°Ғкіј 진нҸӯ 비 мӮ¬мқҙм—җ лӢЁмҲңн•ң м„ нҳ• кҙҖкі„к°Җ м„ұлҰҪн•ҳм§Җ м•ҠмңјлҜҖлЎң, ліё л…јл¬ём—җм„ңлҠ” л°°м—ҙ м „л°©мқҳ кіөк°„мқ„ м—¬лҹ¬ к°ңмқҳ мҳҒм—ӯмңјлЎң л¶„н• н•ң нӣ„ 진нҸӯ 비лҘј мқҙмҡ©н•ҳм—¬ м–ҙлҠҗ мҳҒм—ӯм—җ н‘ңм Ғмқҙ мЎҙмһ¬н•ҳлҠ”м§ҖлҘј нҢҗлӢЁн•ҳлҠ” л°©м•Ҳмқ„ м ңм•Ҳн•ҳмҳҖлӢӨ. н‘ңм Ғмқҙ мЎҙмһ¬н•ҳлҠ” мҳҒм—ӯмқ„ м°ҫкі н•ҙлӢ№ мҳҒм—ӯ л°©н–ҘмңјлЎң л°©н–Ҙнғҗм§Җ мӢңмҠӨн…ңмқ„ нғ‘мһ¬н•ң 비н–үмІҙлҘј м§Җн–Ҙн•ҳлҠ” м Ҳм°ЁлҘј л°ҳліөм ҒмңјлЎң мҲҳн–үн•ЁмңјлЎңмҚЁ л°°м—ҙ кё°мӨҖл°©н–Ҙ л¶Җк·ј мҳҒм—ӯмңјлЎң н‘ңм Ғмқ„ мң„м№ҳмӢңнӮ¬ мҲҳ мһҲмңјл©°, мқҙлҠ” лӘЁнҳём„ұ л¬ём ңлҘј н•ҙкІ°н•ҳм—¬ к°„м„ӯкі„ л°©мӢқмңјлЎң н‘ңм Ғмқҳ л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғмқ„ мҲҳн–үн• мҲҳ мһҲкІҢ н•ңлӢӨ. мҳҲлҘј л“Өм–ҙ, Fig. 2мҷҖ к°ҷмқҖ кІҪмҡ°, л°°м—ҙ кё°мӨҖл°©н–Ҙ(0В°)мқ„ мӨ‘мӢ¬мңјлЎң Вұ14.4В° мқҙлӮҙм—җ н‘ңм Ғмқҙ мң„м№ҳн•ҳкІҢ н•ҳл©ҙ к°„м„ӯкі„ м Ғмҡ© мӢң лӘЁнҳём„ұ л¬ём ңк°Җ л°ңмғқн•ҳм§Җ м•ҠкІҢ лҗңлӢӨ.
ліё л…јл¬ём—җм„ң м ңм•Ҳн•ҳлҠ” л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғ м•Ңкі лҰ¬мҰҳмқҖ Fig. 4мҷҖ к°ҷмңјл©° мғҒм„ён•ң лӮҙмҡ©мқҖ мқҙнӣ„мқҳ м Ҳм—җм„ң кё°мҲ н•ңлӢӨ. ліё л…јл¬ём—җм„ң лӢӨлЈЁлҠ” лӮҙмҡ©мқҖ 진нҸӯ 비мҷҖ кіөк°„л¶„н• н…Ңмқҙлё”мқ„ мқҙмҡ©н•ҳм—¬ к°„м„ӯкі„ лӘЁнҳём„ұмқҙ мЎҙмһ¬н•ҳм§Җ м•ҠлҠ” л°°м—ҙ кё°мӨҖл°©н–Ҙ мҳҒм—ӯмңјлЎң н‘ңм Ғмқ„ мң„м№ҳмӢңнӮӨлҠ” л°©лІ•м—җ лҢҖн•ң кІғмңјлЎң Fig. 4мқҳ м җм„ лӮҙл¶Җм—җ н•ҙлӢ№н•ңлӢӨ.
3.2 кіөк°„л¶„н• кІ©мһҗ
Fig. 5мҷҖ к°ҷмқҙ л°°м—ҙ м „л°©мқҳ 3м°Ёмӣҗ кіөк°„мғҒм—җ л°°м—ҙмқҳ кё°мӨҖл°©н–Ҙкіј ОёSD,m (m = 1, вҖҰ, M)мқҳ к°Ғмқ„ к°–лҠ” м җл“Өмқ„ м—°кІ°н•ң мӣҗлҝ” О©mмқ„ мғқм„ұн•ңлӢӨ. О©1 лӮҙл¶Җмқҳ мҳҒм—ӯмқ„ мІ« лІҲм§ё л¶„н• л ҲлІЁ, О©mкіј О©m-1 мӮ¬мқҙмқҳ мҳҒм—ӯмқ„ m лІҲм§ё л¶„н• л ҲлІЁмқҙлқј н•ҳкі , к°Ғ л ҲлІЁмқҳ нҒ¬кё° dmмқ„ мӢқ (4)мҷҖ к°ҷмқҙ м •мқҳн•ңлӢӨ.

мқҙ л•Ң, мІ« лІҲм§ё л¶„н• л ҲлІЁмқҳ нҒ¬кё° d1лҠ” л°°м—ҙ кё°мӨҖл°©н–Ҙ мҳҒм—ӯмқҳ нҒ¬кё°лҘј кІ°м •н•ҳлҜҖлЎң к°„м„ӯкі„ лӘЁнҳём„ұмқҙ л°ңмғқн•ҳм§Җ м•ҠлҠ” к°ҒлҸ„ лІ”мң„(Вұ Оёua)лҘј м°ёкі н•ҳм—¬ м •н•ҙм•јн•ңлӢӨ. л°°м—ҙ кё°мӨҖл°©н–Ҙмқ„ мӨ‘мӢ¬мңјлЎң Вұ Оёua мқҙлӮҙм—җм„ң лӘЁнҳём„ұмқҙ л°ңмғқн•ҳм§Җ м•ҠлҠ” кІҪмҡ° d1 = 0.8 Оёua м •лҸ„лЎң м„Өм •н•ңлӢӨ. лҳҗн•ң мғҒкё°н•ң л°ҳліөм Ғмқё н‘ңм Ғ мЎҙмһ¬ мҳҒм—ӯ нғҗмғү л°Ҹ 비н–үмІҙ м§Җн–Ҙ мһ‘м—…мқҳ нҡЁмңЁмқ„ н–ҘмғҒмӢңнӮӨкё° мң„н•ҳм—¬, л¶„н• л ҲлІЁ m мқҙ мҰқк°Җн• мҲҳлЎқ л¶„н• л ҲлІЁмқҳ нҒ¬кё° dmмқ„ м җм°Ё мҰқк°ҖмӢңнӮҙмңјлЎңмҚЁ л°°м—ҙ кё°мӨҖл°©н–Ҙм—җм„ң л©Җм–ҙм§ҲмҲҳлЎқ л¶„н• мҳҒм—ӯмқҳ нҒ¬кё°к°Җ м»Өм§ҖлҸ„лЎқ н•ңлӢӨ. мқҙ л•Ң, мғқм„ұлҗң л¶„н• мҳҒм—ӯмқҳ нҳ•нғңк°Җ м •мӮ¬к°Ғнҳ•м—җ к°Җк№қлҸ„лЎқ dmмқҳ мҰқк°ҖнҸӯмқ„ м •н•ҳлҠ” кІғмқҙ л°”лһҢм§Ғн•ҳлӢӨ.
л°°м—ҙмқҳ мӨ‘мӢ¬мқ„ мӣҗм җмңјлЎң н•ҳлҠ” л°ҳм§ҖлҰ„ 1мқҳ кө¬лҘј к°Җм •н•ҳкі , к·ё кө¬мҷҖ мӣҗлҝ” О©mмқҙ көҗм°Ён•ҳлҠ” мӣҗмқ„ Cmмқҙлқј н•ңлӢӨ. мӣҗ CmмқҖ 2ПҖsin ОёSD,mмқҳ л‘ҳл ҲлҘј к°Җм§Җл©°, мқҙлҘј N л“ұ분 н•ҳлҠ” м җл“Өмқҙ кіөк°„л¶„н• кІ©мһҗ кө¬м„ұмқ„ мң„н•ң кјӯ짓м җл“Өмқҙ лҗңлӢӨ. мқҙ л•Ң, мӣҗ мң„мқҳ м җ мӮ¬мқҙмқҳ к°„кІ©мқ„ л¶„н• л ҲлІЁмқҳ нҒ¬кё°мҷҖ 비көҗн•ҳм—¬ м•„лһҳмқҳ мӢқ (5)лҘј л§ҢмЎұн•ҳлҠ” кІҪмҡ°, мӣҗмқ„ 2N л“ұ분н•ҳм—¬ кјӯ짓м җл“Өмқ„ мғқм„ұн•ЁмңјлЎңмҚЁ л¶„н• мҳҒм—ӯ к°„мқҳ нҒ¬кё° нҺём°ЁлҘј мӨ„мқҙлҸ„лЎқ н•ңлӢӨ.
мғҒкё°н•ң ліҖмҲҳл“Өмқ„ мЎ°м Ҳн•ЁмңјлЎңмҚЁ мһ„мқҳмқҳ кіөк°„л¶„н• кІ©мһҗлҘј кө¬м„ұн• мҲҳ мһҲмңјл©°, ліё л…јл¬ём—җм„ңлҠ” мғҒкё°н•ң ліҖмҲҳл“Өмқ„ M = 8, N = 8, ОёSD,1 = 6В°, ОёSD,2 = 12В°, ОёSD,3 = 20В°, ОёSD,4 = 30В°, ОёSD,5 = 42В°, ОёSD,6 = 56В°, ОёSD,7 = 72В°, ОёSD,8 = 90В°лЎң м„Өм •н•ҳм—¬ Fig. 6кіј к°ҷмқҖ кіөк°„л¶„н• кІ©мһҗлҘј кө¬м„ұн•ҳмҳҖлӢӨ.
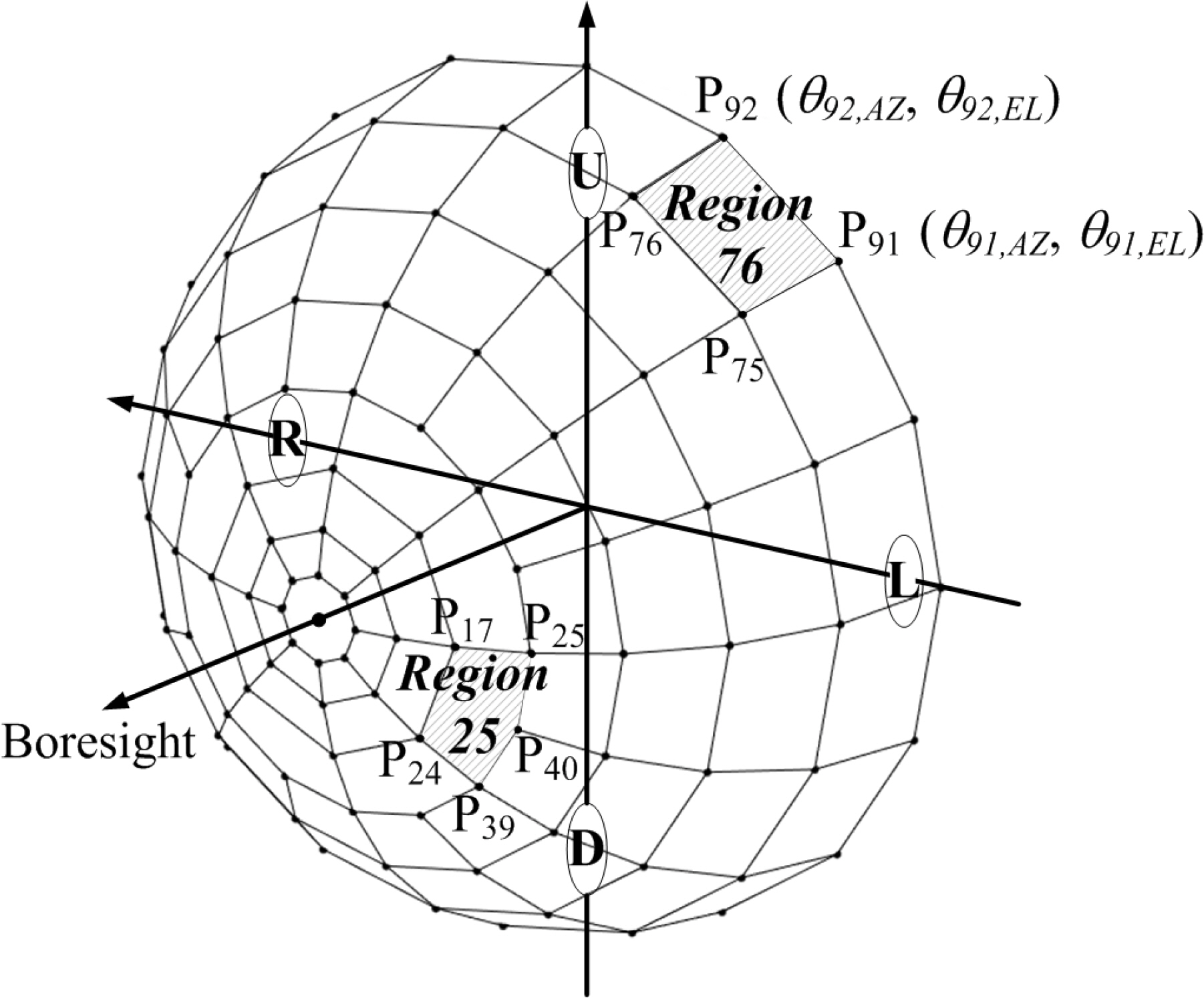
3.3 кіөк°„л¶„н• н…Ңмқҙлё”
м„ӨлӘ…мқҳ нҺёмқҳлҘј мң„н•ҳм—¬ Fig. 6м—җлҠ” л„Ө к°ңмқҳ м•Ҳн…ҢлӮҳлҘј л°°м—ҙн•ҳм—¬ л‘җ к°ңмқҳ 진нҸӯ 비көҗ 축(R/L축, U/D축)л§Ңмқ„ лӮҳнғҖлӮҙм—ҲмңјлӮҳ, л°©н–Ҙнғҗм§Җ м„ұлҠҘ н–ҘмғҒмқ„ мң„н•ҙ м•Ҳн…ҢлӮҳлҘј 추к°Җн•ҳм—¬ 진нҸӯ 비көҗ 축мқҳ мҲҳ(K)лҘј мҰқк°ҖмӢңнӮ¬ мҲҳ мһҲлӢӨ. мқҙ л•Ң, л¶„н• мҳҒм—ӯмқҳ мҲҳлҠ” 진нҸӯ 비көҗ 축мқҳ к°ңмҲҳмҷҖлҠ” кҙҖкі„м—Ҷмқҙ мғҒкё°н•ң M, Nмқҳ к°’м—җ л”°лқјм„ңл§Ң кІ°м •лҗңлӢӨ. Fig. 7мқҖ RU/LD축과 LU/RD축мқҙ 추к°Җлҗҳм–ҙ л„Ө к°ңмқҳ 진нҸӯ 비көҗ 축мқ„ к°–лҠ” кІҪмҡ°лҘј лӮҳнғҖлӮёлӢӨ.

н‘ңм Ғ мӢ нҳёмқҳ нҠ№м„ұ лІЎн„° T вҶ’ R j вҶ’
м—¬кё°м„ң, tiлҠ” н‘ңм Ғ мӢ нҳём—җ мқҳн•ң iлІҲм§ё 진нҸӯ 비көҗ 축мқҳ dB лӢЁмң„ 진нҸӯ 비лҘј мқҳлҜён•ңлӢӨ. ri,jлҠ” jлІҲм§ё л¶„н• мҳҒм—ӯм—җ лҢҖн•ң iлІҲм§ё 진нҸӯ 비көҗ 축мқҳ dB лӢЁмң„ 진нҸӯ 비лҘј мқҳлҜён•ҳл©°, ri,jм—җ лҢҖн•ң мғҒм„ён•ң м„ӨлӘ…мқҖ 3.3.1 ~ 3.3.3м Ҳм—җ кё°мҲ н•ңлӢӨ.
н‘ңм Ғ мӢ нҳёмқҳ нҠ№м„ұ лІЎн„° T вҶ’ R j вҶ’ T вҶ’ R j вҶ’
н‘ңм Ғмқҙ мЎҙмһ¬н• кІғмңјлЎң мҳҲмғҒлҗҳлҠ” л¶„н• мҳҒм—ӯмқ„ кІ°м •н•ҳл©ҙ, н•ҙлӢ№ л¶„н• мҳҒм—ӯмқҳ л°©н–Ҙ лІЎн„° D j вҶ’ D j вҶ’ D j вҶ’ D j вҶ’
мӢӨм ң н‘ңм Ғмқҳ л°©н–Ҙкіј м¶”м • л°©н–Ҙ D j вҶ’
мӢӨм ң л°©н–Ҙнғҗм§Җ мӢңмҠӨн…ң м Ғмҡ© мӢңм—җлҠ”, кіөк°„л¶„н• кІ©мһҗ кө¬м„ұ нӣ„ к°Ғ л¶„н• мҳҒм—ӯмқҳ л°©н–ҘлІЎн„°лҘј кө¬н•ҳкі лӢЁмӣҗнҳ•л°°м—ҙм•Ҳн…ҢлӮҳ м ңмһ‘ нӣ„ мёЎм •мқ„ нҶөн•ҙ к°Ғ л¶„н• мҳҒм—ӯмқҳ нҠ№м„ұ лІЎн„°лҘј кө¬н•ҳм—¬ м•„лһҳ Table 1кіј к°ҷмқҖ кіөк°„л¶„н• н…Ңмқҙлё”мқ„ мғқм„ұн•ңлӢӨ. мғқм„ұлҗң кіөк°„л¶„н• н…Ңмқҙлё”мқ„ мӮ¬м „м—җ л°©н–Ҙнғҗм§Җ мӢңмҠӨн…ңм—җ мһҘмһ…н•ң нӣ„ мӢӨм ң мҡҙмҡ© мӢң мқҙлҘј нҷңмҡ©н•ЁмңјлЎңмҚЁ н‘ңм Ғм—җ лҢҖн•ң л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғмқ„ мҲҳн–үн•ҳкІҢ лҗңлӢӨ.
TableВ 1.
Space division table (M = 8, N = 8 case)
| л¶„н• мҳҒм—ӯ | л°©н–Ҙ лІЎн„° | нҠ№м„ұ лІЎн„° |
|---|---|---|
| 1 |
|
|
| 2 |
|
|
| вӢ® | вӢ® | вӢ® |
| 89 |
|
|
л¶„н• мҳҒм—ӯмқҖ мҳҒм—ӯмқ„ кө¬м„ұн•ҳлҠ” кјӯ짓м җмқҳ мҲҳ, Zм—җ л”°лқј л°°м—ҙ кё°мӨҖл°©н–Ҙ мҳҒм—ӯ(Z = N), мқјл°ҳ мҳҒм—ӯ(Z = 4), мһ¬л¶„н• л°ңмғқ мҳҒм—ӯ(Z = 5)мқҳ м„ё к°Җм§ҖлЎң кө¬л¶„н• мҲҳ мһҲмңјл©°, к°Ғ мҳҒм—ӯм—җ лҢҖн•ң мғҒм„ён•ң м„ӨлӘ…кіј R j вҶ’
3.3.1 л°°м—ҙ кё°мӨҖл°©н–Ҙ мҳҒм—ӯ
л°°м—ҙ кё°мӨҖл°©н–Ҙ мҳҒм—ӯмқҖ кіөк°„л¶„н• н…Ңмқҙлё”мқҳ 1лІҲ л¶„н• мҳҒм—ӯмңјлЎңм„ң, мқҙ мҳҒм—ӯ лӮҙм—җ н‘ңм Ғмқҙ мң„м№ҳн• кІҪмҡ° к°„м„ӯкі„ лӘЁнҳём„ұ л¬ём ңк°Җ л°ңмғқн•ҳм§Җ м•ҠлҠ”лӢӨ. л°°м—ҙ кё°мӨҖл°©н–Ҙм—җм„ңлҠ” 진нҸӯ 비көҗ 축м—җ кҙҖкі„м—Ҷмқҙ 0 dBмқҳ 진нҸӯ 비 к°’мқ„ к°Җм§ҖлҜҖлЎң, мғҒкё°н•ң мӢқ (7)мқҳ ri,1мқҖ лӢӨмқҢкіј к°ҷлӢӨ.
3.3.2 мқјл°ҳ мҳҒм—ӯ
кіөк°„л¶„н• кІ©мһҗлЎң л¶„н• лҗҳлҠ” лҢҖл¶Җ분мқҳ мҳҒм—ӯмқҖ л„Ө к°ңмқҳ кјӯ짓м җмңјлЎң кө¬м„ұлҗң мқјл°ҳ мҳҒм—ӯмқҙлӢӨ. мқјл°ҳмҳҒм—ӯмқҳ кІҪмҡ°, мҳҒм—ӯмқ„ кө¬м„ұн•ҳлҠ” л„Ө кјӯ짓м җм—җм„ңмқҳ 진нҸӯ 비лҘј мқҙмҡ©н•ҳм—¬ л¶„н• мҳҒм—ӯмқҳ нҠ№м„ұ лІЎн„° R j вҶ’
н‘ңм Ғмқҙ P a вҶ’
мҳҲлҘј л“Өм–ҙ, Fig. 6кіј к°ҷмқҙ л‘җ к°ңмқҳ 진нҸӯ 비көҗ 축(R/L 축, U/D축)мқҙ мЎҙмһ¬н•ҳлҠ” кІҪмҡ°, мІ« лІҲм§ё 진нҸӯ 비көҗ 축мқ„ R/L축, л‘җ лІҲм§ё 진нҸӯ 비көҗ 축мқ„ U/D축мқҙлқј н•ҳл©ҙ, P75вҖ’P76вҖ’P91вҖ’P92лЎң кө¬м„ұлҗҳлҠ” мқјл°ҳ мҳҒм—ӯмқҳ нҠ№м„ұ лІЎн„° R 76 вҶ’ [ a 1.75 + a 1.76 + a 1 , 91 + a 1 , 92 4 , вҖү a 2 , 75 + a 2 , 76 + a 2 , 91 + a 2 , 92 4 ]
3.3.3 мһ¬л¶„н• л°ңмғқ мҳҒм—ӯ
мғҒкё°н•ң л°”мҷҖ к°ҷмқҙ мӢқ (5)лҘј л§ҢмЎұн•ҳлҠ” кІҪмҡ°, кіөк°„л¶„н• кІ©мһҗ кө¬м„ұмқ„ мң„н•ң кјӯ짓м җ мғқм„ұ л°©лІ•мқҙ лӢ¬лқјм§җмңјлЎң мқён•ҳм—¬ Fig. 6мқҳ 25лІҲ мҳҒм—ӯкіј к°ҷмқҙ лӢӨм„Ҝ к°ңмқҳ кјӯ짓м җмңјлЎң кө¬м„ұлҗҳлҠ” л¶„н• мҳҒм—ӯмқҙ л°ңмғқн•ҳкІҢ лҗңлӢӨ. мқҙ л•Ң, лӢӨм„Ҝ к°ң кјӯ짓м җмқҳ 진нҸӯ 비лҘј лӘЁл‘җ мқҙмҡ©н•ҳм—¬ нҠ№м„ұ лІЎн„°лҘј кі„мӮ°н•ҳл©ҙ л°°м—ҙ кё°мӨҖл°©н–Ҙкіј лЁј мӘҪмңјлЎң нҠ№м„ұ лІЎн„°м—җ м№ҳмҡ°м№Ёмқҙ мЎҙмһ¬н• мҲҳ мһҲмңјлҜҖлЎң мҳҒм—ӯ мҷёкіҪмқҳ л„Ө к°ң кјӯ짓м җл§Ңмқ„ мқҙмҡ©н•ҳм—¬ нҠ№м„ұ лІЎн„°лҘј кі„мӮ°н•ңлӢӨ. мҳҲлҘј л“Өм–ҙ, Fig. 6мқҳ кІҪмҡ°, P17вҖ’P24вҖ’P25вҖ’P39вҖ’P40лЎң кө¬м„ұлҗҳлҠ” мһ¬л¶„н• л°ңмғқ мҳҒм—ӯмқҳ нҠ№м„ұ лІЎн„° R 25 вҶ’
л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғ мӢң뮬л Ҳмқҙм…ҳ
4.1 мӢң뮬л Ҳмқҙм…ҳ ліҖмҲҳ м„Өм •
мғҒкё°н•ң кіөк°„л¶„н• н…Ңмқҙлё”мқ„ мқҙмҡ©н•ң л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғ м•Ңкі лҰ¬мҰҳм—җ лҢҖн•ҳм—¬ Monte Carlo мӢң뮬л Ҳмқҙм…ҳмқ„ нҶөн•ҙ м„ұлҠҘмқ„ нҷ•мқён•ҳмҳҖлӢӨ. л°°м—ҙ кё°мӨҖл°©н–Ҙ Вұ75В° лІ”мң„м—җ н‘ңм Ғмқҳ мҙҲкё° л°©н–Ҙмқ„ randomн•ҳкІҢ м„Өм •н•ҳкі , мӢ нҳё лҢҖ мһЎмқҢ비(SNR)лҠ” 5 ~ 30 dBлЎң н•ҳмҳҖлӢӨ. 진нҸӯ 비көҗ 축мқҳ мҲҳ K лҠ” 2, 4мқҳ л‘җ к°Җм§ҖлЎң н•ҳмҳҖмңјл©°, 진нҸӯ 비көҗ 축мқҙ 2к°ңмқё кІҪмҡ° R/L축과 U/D축, 4к°ңмқё кІҪмҡ°лҠ” мқҙм—җ лҚ”н•ҳм—¬ лҢҖк°Ғм„ л°©н–ҘмңјлЎң RU/LD축과 LU/RD축мқ„ 추к°ҖлЎң м„Өм •н•ҳмҳҖлӢӨ. л°°м—ҙмқ„ кө¬м„ұн•ҳлҠ” м•Ҳн…ҢлӮҳ мҶҢмһҗмқҳ л°©мӮ¬ нҢЁн„ҙмқҖ 80В° л°Ҹ 100В° 3 dB л№” нҸӯ(Оё3dB)мқҳ к°Җмҡ°мӢңм•Ҳ нҢЁн„ҙмқ„ к°Җм •н•ҳмҳҖмңјл©°, 진нҸӯ 비көҗ м Ғмҡ©мқ„ мң„н•ң м•Ҳн…ҢлӮҳ кё°мӣҖк°Ғ(Оёs)мқҖ 15В° л°Ҹ 20В°лЎң л‘җм—ҲлӢӨ. лҳҗн•ң м•Ҳн…ҢлӮҳ к°„ мқҙкІ©кұ°лҰ¬ dлҠ” 0.24 m л°Ҹ 0.48 mлЎң л‘җм—ҲлӢӨ. к°Ғ кІҪмҡ°м—җ лҢҖн•ҳм—¬ 2,000нҡҢмқҳ мӢң뮬л Ҳмқҙм…ҳмқ„ мҲҳн–үн•ҳм—¬ н‘ңм Ғмқҙ л°°м—ҙ кё°мӨҖл°©н–Ҙ мҳҒм—ӯ(1лІҲ л¶„н• мҳҒм—ӯ) лӮҙлЎң мң„м№ҳн•ҳкё°к№Ңм§Җ н•„мҡ”н•ң нҡҹмҲҳлҘј кө¬н•ҳмҳҖлӢӨ.
4.2 мӢң뮬л Ҳмқҙм…ҳ кІ°кіј
м•„лһҳмқҳ Fig. 7мқҖ SNR 30 dB, 진нҸӯ 비көҗ 축 4к°ң, м•Ҳн…ҢлӮҳ мҶҢмһҗмқҳ 3 dB л№” нҸӯкіј кё°мӣҖк°Ғмқҙ к°Ғк°Ғ 80В° л°Ҹ 20В°мқё кІҪмҡ°м—җ лҢҖн•ҳм—¬, н‘ңм Ғмқҳ мҙҲкё° л°©н–Ҙмқҙ л°©мң„к°Ғ 40В°, кі к°Ғ 50В°мқј л•Ңмқҳ л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғ кіјм •мқ„ лӮҳнғҖлӮёлӢӨ. мҙҲкё° н‘ңм Ғмқҳ л°©н–ҘмқҖ Fig. 7мқҳ мІӯмғү мӣҗмңјлЎң н‘ңмӢңн•ҳмҳҖлӢӨ. н‘ңм ҒмңјлЎңл¶Җн„°мқҳ мҲҳмӢ мӢ нҳёлҘј мқҙмҡ©н•ҳм—¬ мғҒкё°н•ң мӢқ (8)м—җ л”°лқј н‘ңм Ғмқҙ 60лІҲ л¶„н• мҳҒм—ӯм—җ мң„м№ҳн•Ёмқ„ кі„мӮ°н•ҳм—¬ 비н–үмІҙлҘј D 60 вҶ’ D 5 вҶ’
Table 2~9лҠ” 진нҸӯ 비көҗ 축мқҳ мҲҳ(K) л°Ҹ SNRм—җ л”°лҘё л°ҳліө нҡҹмҲҳлҘј 비көҗн•ҳкі мһҲлӢӨ. н‘ңлЎңл¶Җн„° SNRмқҙ лҶ’мқ„мҲҳлЎқ л°ҳліө нҡҹмҲҳк°Җ к°җмҶҢн•Ёмқ„ м•Ң мҲҳ мһҲмңјл©°, мқҙлҠ” н‘ңм Ғмқҙ мЎҙмһ¬н•ҳлҠ” л¶„н• мҳҒм—ӯмқ„ кІ°м •н• л•Ң н‘ңм ҒмңјлЎңл¶Җн„°мқҳ мҲҳмӢ мӢ нҳёмқҳ м„ёкё°к°Җ мһЎмқҢм—җ 비н•ҳм—¬ к°•н• мҲҳлЎқ н‘ңм Ғмқҙ мЎҙмһ¬н•ҳлҠ” л¶„н• мҳҒм—ӯмқ„ м •нҷ•нһҲ кІ°м •н• мҲҳ мһҲкё° л•Ңл¬ёмңјлЎң нҢҗлӢЁлҗңлӢӨ. лҳҗн•ң лҸҷмқјн•ң SNRмқ„ к°–лҠ” кІҪмҡ° 진нҸӯ 비көҗ 축мқҳ мҲҳлҘј мҰқк°ҖмӢңмјң л°ҳліө нҡҹмҲҳлҘј мӨ„мқј мҲҳ мһҲмқҢмқ„ нҷ•мқён•ҳмҳҖлӢӨ. мқҙм—җ лӢЁмӣҗнҳ•л°°м—ҙм•Ҳн…ҢлӮҳлҘј м Ғмҡ©н•ң л°©н–Ҙнғҗм§Җ мӢңмҠӨн…ң мҡҙмҡ© мӢң, мҡҙмҡ© нҷҳкІҪмқ„ кі л Өн•ҳм—¬ SNRмқҙ лӮ®мқ„ кІғмңјлЎң мҳҲмғҒлҗҳлҠ” кІҪмҡ° 진нҸӯ 비көҗ 축мқҳ мҲҳлҘј мҰқк°ҖмӢңнӮӨлҠ” кІғмқҙ ліҙлӢӨ нҡЁмңЁм Ғмқј кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.
TableВ 2.
Number of iterations (Оё3dB = 80В°, Оёs = 15В°, d = 0.24 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 6.31 | 3.29 | 2.24 | 1.89 | 1.70 | 1.65 |
| 4 | 4.77 | 2.74 | 2.02 | 1.77 | 1.65 | 1.62 |
TableВ 3.
Number of iterations (Оё3dB = 80В°, Оёs = 20В°, d = 0.24 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 4.97 | 2.95 | 2.15 | 1.84 | 1.68 | 1.63 |
| 4 | 3.71 | 2.44 | 1.97 | 1.75 | 1.65 | 1.61 |
TableВ 4.
Number of iterations (Оё3dB = 100В°, Оёs = 15В°, d = 0.24 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 9.08 | 3.88 | 2.32 | 1.82 | 1.68 | 1.60 |
| 4 | 5.36 | 2.79 | 1.98 | 1.73 | 1.63 | 1.60 |
TableВ 5.
Number of iterations (Оё3dB = 100В°, Оёs = 20В°, d = 0.24 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 6.44 | 3.06 | 2.15 | 1.76 | 1.66 | 1.62 |
| 4 | 3.88 | 2.37 | 1.89 | 1.68 | 1.60 | 1.57 |
TableВ 6.
Number of iterations (Оё3dB = 80В°, Оёs = 15В°, d = 0.48 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 4.95 | 2.85 | 2.13 | 1.82 | 1.69 | 1.62 |
| 4 | 3.72 | 2.35 | 1.93 | 1.76 | 1.66 | 1.60 |
TableВ 7.
Number of iterations (Оё3dB = 80В°, Оёs = 20В°, d = 0.48 m)
| SNR [dB] | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|
| K | ||||||
| 2 | 4.99 | 2.94 | 2.09 | 1.82 | 1.69 | 1.64 |
| 4 | 3.69 | 2.42 | 1.96 | 1.76 | 1.65 | 1.63 |
кІ° лЎ
мқҙ л…јл¬ём—җм„ңлҠ” лӢЁмӣҗнҳ•л°°м—ҙм•Ҳн…ҢлӮҳм—җм„ң л°°м—ҙ м „л°©мқҳ 3м°Ёмӣҗ кіөк°„м—җ лҢҖн•ң к°„м„ӯкі„ лӘЁнҳём„ұ л¬ём ңлҘј н•ҙкІ°н•ҳкё° мң„н•ҳм—¬, кіөк°„л¶„н• н…Ңмқҙлё”мқҳ к°ңл…җмқ„ м ңм•Ҳн•ҳкі мқҙлҘј мқҙмҡ©н•ң н‘ңм Ғмқҳ л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғ л°©м•Ҳм—җ лҢҖн•ҳм—¬ кё°мҲ н•ҳмҳҖлӢӨ. лҳҗн•ң лӢӨм–‘н•ң кІҪмҡ°м—җ лҢҖн•ң Monte Carlo мӢң뮬л Ҳмқҙм…ҳ[7]мқ„ нҶөн•ҳм—¬ м ңм•Ҳн•ң л°©лІ•мқҙ м„ұкіөм ҒмңјлЎң лҸҷмһ‘н•Ёмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
мқҙлҘј нҶөн•ҳм—¬ ліё л…јл¬ём—җм„ң м ңм•Ҳн•ң л°©лІ•мқ„ мқҙмҡ©н•ҙ н‘ңм Ғ л°©н–Ҙнғҗм§Җ л°Ҹ 추м Ғ мӢңмҠӨн…ң кө¬м¶• мӢң 비н–үмІҙ л…ёмҰҲл¶ҖлҘј лӢӨлҘё лӘ©м ҒмңјлЎң нҷңмҡ©н• мҲҳ мһҲмқҢмқ„ нҷ•мқён•ҳмҳҖлӢӨ. кіөк°„л¶„н• н…Ңмқҙлё” мғқм„ұ мӢң н•„мҡ”н•ң мӮ¬м „ мёЎм •мқҳ нҡҹмҲҳ л°Ҹ л°©н–Ҙнғҗм§Җ мӢңмҠӨн…ңм—җ кіөк°„л¶„н• н…Ңмқҙлё”мқ„ мһҘмһ…н•ҳлҠ”лҚ° мҶҢмҡ”лҗҳлҠ” л©”лӘЁлҰ¬лҠ” л¶„н• мҳҒм—ӯмқҳ мҲҳмҷҖ 비лЎҖн•ҳл©°, м ңм•Ҳн•ң м•Ңкі лҰ¬мҰҳмқҳ нҡЁмңЁмқҖ кіөк°„ л¶„н• нҳ•нғңм—җ мқҳн•ҙ мҳҒн–Ҙмқ„ л°ӣмңјлҜҖлЎң, н–Ҙнӣ„ мөңм Ғмқҳ кіөк°„ л¶„н• л°©м•Ҳм—җ лҢҖн•ң м—°кө¬к°Җ н•„мҡ”н• кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.




