



서 론
1950년대 구소련의 질주와 미국의 추격으로 시작된 우주개발은 반세기가 더 지난 지금 그들만의 영역이 아닌, 많은 나라가 개발에 뛰어드는 새로운 영역으로 자리 잡았다. 지상, 해상, 그리고 공중으로 구분되는 전통적인 전장영역이 우주라는 거대한 시공간으로 확 장되어 기존의 전장과 결합을 이뤄 복잡하고 거대한 다중영역을 이루기에 이르렀다. 우주라는 새로운 전장영역에 대비하기 위해 미국, 중국 등 우주 선진국들은 치열한 우주개발 경쟁을 벌이고 있지만, 우리나라는 상대적으로 뒤늦은 1990년대부터 우주개발을 시작하였다. 1992년 과학실험 위성 개발을 시작으로 통신위성 무궁화위성(KOREASAT)과 다목적 실용위성 아리랑위성(KOMPSAT, KOrea Multi-Purpose SATellite) 등을 지구궤도에 올렸고, 이후에도 꾸준히 국가 우주역량을 발전시켜왔다. 하지만 정찰위성, 조기경보위성 등으로 대표되는 군사 분야에서의 우주개발은 아직 걸음마 단계라고 평가할 수 있다. 우리 군은 현재 주요 전력사업으로 군 정찰위성, 지상 배치용 전자광학 우주감시체계를 개발하고 있지만, 아직 전력화 단계에 이르지 못했다.
현대 전장에서 우주 자산을 이용한 감시 및 정찰 활동은 필수적이다. 정찰위성은 작전에 필요한 표적 정보를 수집하고, 이를 통해 지휘관의 전장상황인식을 지원하며 때로는 전투피해평가를 위해 사용될 수도 있다. 평시에도 위성 영상정보를 활용하여 주변국을 감시하고, 잠재적이고 불특정한 위협으로부터 국가안보를 지키는 중요한 정보를 제공한다. 하지만 우리 군은 일부 다목적실용위성 영상정보를 제외한 대부분의 정보를 미국의 정찰위성에 의존하고 있는 실정이다.
본 연구는 한반도 지역의 안정적이고 지속적인 감시를 위한 효과적인 위성군(Satellite Constellation) 설계를 목적으로 하고 있다. 위성군이란 우주미션을 수행하기 위해 두 대 이상의 위성을 지구궤도에 배치하는 것을 말한다. 여러 대의 위성을 지구궤도에 배치하는 방법, 즉 위성군의 설계방식은 여러 가지가 있으며 위성의 운용 목적에 따라 얼마든지 다르게 설계가 가능하다. 우리는 본 연구에서 군사 정찰위성이 가져야 할 특성에 대해 먼저 논의하고 이러한 목적을 가장 효율적으로 달성할 수 있는 새로운 위성군인 BB(Beach Ball) 위성군을 소개한다. BB위성군은 위성군의 궤도가 지구를 감싼 모습이 마치 비치볼의 모습과 유사하여 붙여진 이름이다. BB위성군은 군 정찰자산의 핵심 능력인 반복적, 지속적 감시가 가능하고 짧은 재방문 주기를 가져 위협을 최소화 할 수 있는 방법이다. BB위성군은 정찰의 안정성과 지속성을 확보하기 위해 궤도면과 태양이 이루는 각이 일정한 태양동기궤도(Sun-Synchronous Orbit)와 하루를 주기로 같은 시각과 위치를 지나는 지상궤적의 반복성(Ground Repeating Track) 을 융합하여 설계되었다.
본 연구에서 고려하는 위성체계는 비용 대 효과 측면에서 우수하며 군이 정찰위성의 실질적인 대안으로 평가하고 있는 초소형 위성을 선정하였다. 각 초소형 위성은 높은 해상도와 군 작전 상 정찰정보의 시인성 확보를 위하여 전자광학(EO, Electro-Optical) 카메라를 탑재한 것으로 가정하였으며, 정찰 임무 시간대를 주간으로 한정하였다. 위성군 설계를 위해 활용한 프로그램은 우주 물체 시뮬레이션 프로그램인 STK(Satellite Tool Kit)이다.
요약하자면, 본 연구는 한반도 상공을 주간에 지속적으로 감시할 수 있는 초소형 위성군의 설계방법에 대해 논의한다. 이를 위해, 제2장에서는 기존 연구에 대해 소개하며 본 연구의 차별성에 대해 설명한다. 제3장에서는 군 정찰위성의 요구조건과 이를 실현하기 위한 위성군 설계 방법에 대해 논의하며, 제4장에서는 연구진이 제안하는 BB위성군이 다른 위성군에 비해 우수한 점을 실험결과를 통해 제시한다. 마지막으로 제5장에서는 연구의 한계점과 차후 연구방향에 대해 논의한다.
기존 연구 고찰
본 장에서는 일반 위성군의 국내·외 연구 및 개발 사례를 먼저 살펴보고, 본 연구의 대상이 되는 초소형 위성에 대한 연구를 소개한다. 마지막으로, 위성군의 설계방식을 다룬 기존 연구에 대해 고찰한다.
2.1 국내·외 위성군 개발 사례
일상에서 접하기 쉬운 대표적인 위성군으로는 각 국가의 항법 위성이 있다. 미국의 GPS(Global Positioning System)는 최소 24기의 위성이 6개의 궤도면에 분포되어 지상 대부분의 지점에서 최소 6기의 위성이 보이도록 설계되었다[1]. 프랑스 국립 우주센터(CNES, Centre National d'Etudes Spatiales)에서 개발한 Pleiades 위성은 180°의 위상차를 둔 2기의 위성으로 구성된 태양동기궤도 위성군이다[2]. 독일 항공우주센터(DLR, Deutsches Zentrum fur Luft-und Raumfahrt)에서 운용 중인 TSX (TerraSAR-X)와 TDX(Tandem-X)는 태양동기궤도 위성군으로 합성개구레이다(SAR, Synthetic Aperture RADAR)로 최대 1 m 해상도의 3차원 영상을 얻을 수 있다[3]. 이탈리아의 COSMO-SkyMed(COnstellation of small Satellites for the Mediterranean basin Observation)는 4기의 SAR 위성이 하나의 태양동기궤도에 배치되어 있다[4]. 미국의 한 우주개발 기업에서 개발 및 구축 중인 Starlink는 위성으로 범지구적인 인터넷 서비스망을 제공할 예정이다. Starlink는 약 12,000기의 위성으로 구성되어 있으며, 2020년대 중반까지 배치가 완료될 예정이다[5].
우리나라에는 아직 위성군이 없다. 다만 항공우주연구원은 차세대중형위성(CAS500) 1호와 2호를 개발 중이며 이는 2기로 구성되어 태양동기궤도를 비행하는 위성군으로 2020년까지 완성을 목표로 하고 있다[6].
현재 연구 및 개발이 진행 중인 군 정찰위성 사업(425 사업)은 SAR 위성 4기와 EO 위성 1기로 이루어진 체계로 2020년대 전력화를 목표로 하고 있다. 이는 한국 최초의 군용 정찰위성 사업이며, 최고 수준의 해상도를 보유한 위성 개발을 포함하고 있어 큰 기대를 모으고 있다. 하지만, 짧은 주기로 목표지점을 지속적으로 관측하기에 위성 수가 적다는 제한점이 있다. 또한, 재방문주기가 약 2시간으로 관측 공백이 비교적 길다는 우려가 있는 것 또한 사실이다.
2.2 국내·외 초소형 위성 개발 사례
한편, 최근 전 세계 우주산업 시장은 ‘뉴스페이스’라 칭하는 새로운 패러다임의 변화가 나타나고 있다. 과거 우주개발은 국가차원의 목표 달성을 위하여 정부가 주도하였으며, 장기적인 대규모 투자가 이를 뒷받침하였다[7]. 그러나 2000년대에 들어오면서 우주개발의 상업화가 진전되면서 중소기업과 소규모 벤처 기업들이 각자의 목표를 가지고 단기적으로 저비용을 투자하는 방식으로 변화하고 있다. ‘뉴스페이스’ 시대의 위성 개발 추세는 고비용의 대형위성 개발이 아닌 무게 100 kg 이하의 저렴한 초소형 위성 개발이 주를 이루고 있다. 이러한 변화 속에, 초소형 위성의 우주 임무 가능성을 다룬 연구와[8], 장차 많은 위성 발사로 야기될 지구궤도 내 위성과 우주물체와의 충돌을 방지하기 위해 초소형 위성의 우주 궤도 교통관제를 위한 초소형 위성군 설계에 관한 연구가 수행되었다[9].
국내에서도 초소형 위성 개발을 위한 많은 연구가 진행 중인데, 과학기술정보통신부는 2018년 재해재난 등 상황을 감시할 수 있는 초소형 위성 체계 구축을 위한 기획연구를 수행하였다[10]. 또한, KAIST 인공위성 연구소에서는 우주기술 검증용 100 kg급 차세대소형위성 1호를 개발하고 2018년 발사하기도 하였다[10]. 서현석(2012)은 해외 초소형 위성 기술 동향을 분석하고 위성 소형화에 필요한 기술을 분석, 제시하였으며[11], 박재필(2016)은 연세대학교와 미 항공우주국이 공동 개발하는 CANYVAL-X 위성의 위성체 및 임무 설계를 연구하였다[12].
2.3 위성군 설계방식 연구 고찰
민간에서 위성군을 만들기 위해 가장 보편적이고 많이 사용하는 방법은 존 워커가 제안한 워커-델타 위성군이다[13]. 이는 지구 전체를 범위로 하는 임무를 수행하기 위해 지구 전체에 고르고 균일하게 배치되는 위성군이다. 워커-델타 위성군은 본 연구에서도 중요하게 다루어지는바 자세한 설명은 3장에서 기술한다. 위성군을 설계하는 방식은 여러 방법이 있는데, 지구 극점을 지나는 극궤도를 지니면서 워커-델타와 다르게 위성들을 비균일, 비대칭적으로 분포시키는 방식, 원형궤도가 아닌 고타원형 궤도와 적도 궤도를 융합한 타원형 위성군 등이 있다[14].
김남균 등(2008)은 한반도 지역의 효율적 관측을 위해 워커-델타 위성군이 아닌 다른 방식으로 최적의 위성군을 설계하였다[15]. 이 연구는 위성군 구성에 필요한 최소한의 위성 수를 제시하였다. 이 연구는 본 연구와 유사하지만, 전 시간대에서의 효율적 임무 수행을 목표로 연구되어 우리가 추구하는 정찰 임무의 안정성 확보와는 거리가 있다.
Montari 등(2012)은 태양동기궤도 위성을 위성군으로 설계하는 개념을 제시하였다[16]. 이는 하나의 위성을 위성군으로 간주하는 개념으로, 독립적인 개별 위성들로 구성된 위성군 개념이 적용되지 않았다. Chen Jie(2004)는 고도의 변화가 안정적인 동결궤도(Frozen Orbit) 개념과 2일 주기의 지상궤적의 반복성을 태양동기궤도에 적용하여 궤도를 설계하였다[17]. 김화영 등(2015)은 태양동기궤도 위성군 궤도 최적화에 관한 연구를 수행하였다[18]. 이는 2∼3기의 태양동기궤도 위성에 위성군 개념을 적용하였으며, 위성-지상국-목표물의 교신 및 관측시간 등을 고려하여 효율적인 운영론을 제시하고 있다. 하지만 이 연구에서 제시한 위성군 설계방식을 여러 대의 위성이 포함되는 위성군에 적용하는 것은 어려운 일이다.
선행연구의 분석을 통해 본 연구의 차별점은 다음과 같다. ① 1일을 주기로 같은 지상궤적을 반복할 수 있는 공전주기를 위해 태양동기궤도의 고도를 설정하여 태양동기성과 지상반복성을 융합하였다. ② 기울기 와 고도가 같은 태양동기궤도의 승교점을 변화시켜가며 복제하여 위성군을 설계하였다. ③ 연구진의 위성군은 전자광학 위성이 촬영 가능한 주간시간 대에 일정한 재방문주기를 가지고 한반도를 집중적으로 촬영할 수 있도록 설계되었다. ④ 설계한 위성군의 재방문 주기와 관측 소요시간의 표준편차는 0에 가깝다. 이는 위성군의 뛰어난 안정성을 의미한다. ⑤ 위성군에 구성되는 위성은 10기 이상의 다수의 위성이다.
초소형 위성군 설계
본 장에서는 먼저 우리 군이 필요로 하는 정찰 인공위성 자산의 요구사항을 나열한 후, 초소형 위성과 우주물체 분석 프로그램에 대해 간략히 소개한다. 이어서, 워커-델타 위성군을 설명하고 이 방법을 활용하여 군의 요구사항이 반영된 위성군을 설계하고 분석한다. 이후, 연구진의 위성군인 BB 위성군의 설계 방법론을 설명하고 BB 위성군을 워커-델타 위성군, 다목적 실용위성 시리즈와 비교 및 분석하여 제시하는 방법론의 장점을 식별한다.
3.1 군이 필요로 하는 인공위성 정찰자산의 조건
우리 군이 필요로 하는 인공위성 정찰자산의 특성은 상용 위성의 특성과 분명 다를 것이며, 군사용을 목적으로 하는 정찰위성은 다음과 같은 필요조건을 갖춰야 한다.
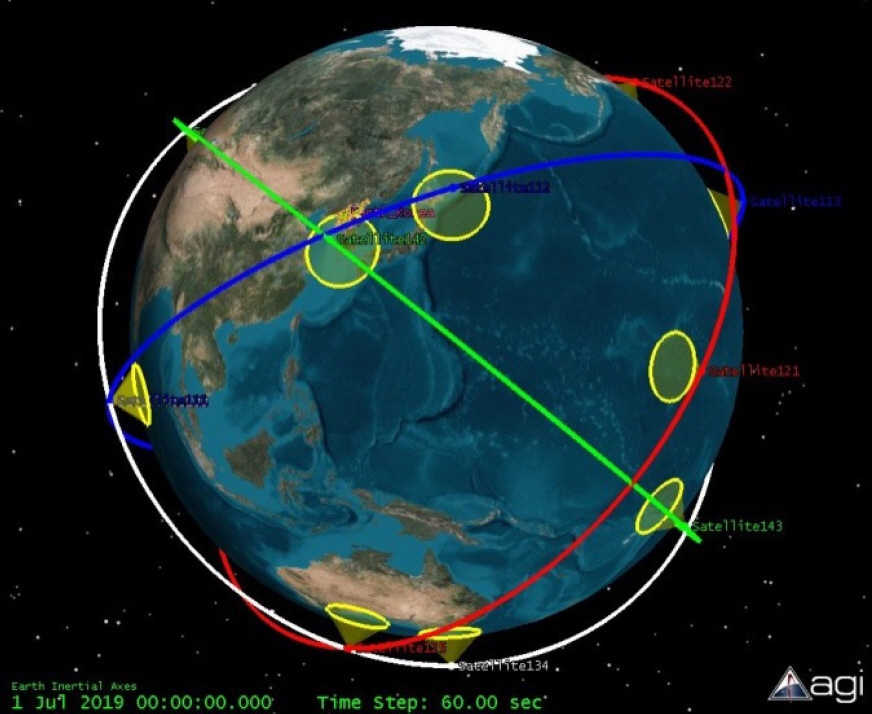
첫째, 짧은 재방문주기로 정찰에 대한 지속성을 확보해야 한다. 재방문주기란 특정한 지역(지상)의 상공을 인공위성이 방문하여 지나간 뒤, 다음 차례에 인공위성이 방문하기까지 걸리는 시간을 말한다. 그 시간 중에는 정찰할 수 없는 정찰 공백이 생기기 때문에 재방문주기가 짧을수록 지속적인 관측을 할 수 있다. 하나의 위성으로 자전하는 지구의 특정 지역을 짧은 주기로 관측한다는 것은 물리적으로 불가능하다. 그러므로 다수의 위성으로 이루어진 위성군은 재방문주기를 효과적으로 줄일 수 있다. Fig. 1은 대표적인 위성군인 워커-델타 위성군의 한 사례를 표현한 것이다.
둘째, 우주 환경에서 운용되는 동안 뛰어난 안정성을 가져야 한다. 우주의 특성상 한번 쏘아 올린 위성은 유지보수 없이 운용해야 하고, 돌발 상황에 대한 대처가 어렵기 때문에 설계시부터 최악의 상황을 고려해야 한다. 또한, 지구궤도를 비행하는 과정에 궤도 역학을 비롯하여 복잡한 인과관계와 변수들이 존재한다. 이러한 조건 속에서 안정성을 확보하기 위해서는 최대한 많은 수의 변수를 줄여 불확실성을 감소시켜야 한다.
셋째, 한반도 전구 내 목표지점에 대한 반복감시를 통해 적 위협 징후를 신속하게 식별할 필요가 있다. 위성정찰의 특징이자 장점으로 같은 지역의 사진을 계속 찍어서 그 변화를 확인하는 ‘변화탐지(Change Detection)’가 있다. 가령, 북한 지역에 대규모 부대가 이동하거나, 핵실험을 위한 활동 등은 변화탐지로 포착해 낼 수 있다.
넷째, 정확한 전구상황인식을 위해 정찰위성은 뛰어난 해상도를 보유해야 한다. 해상도의 높고 낮음을 결정하는 요소는 다양하게 존재하지만, 중요한 요소는 카메라 렌즈의 구경과 위성의 고도다. 렌즈 구경은 크면 클수록 좋지만, 제작비용의 증가와 커다란 위성을 우주로 수송하기 위한 발사비용의 증가로 그 크기를 늘리는 데에는 한계가 존재한다. 이러한 한계를 극복하기 위한 현실적인 대안은 지상을 높은 고도로 먼발치에서 관측하는 것이 아니라 낮은 고도에서 가깝게 관측하는 것이다. 이러한 이유로 지구관측위성은 대부분 저궤도(100∼1,500 km)를 이용하고 있으며, 우리나라 다목적실용위성 시리즈는 모두 500∼700 km 사이의 고도를 유지하고 있다[6]. 하지만, 고도가 내려갈수록 지구 대기의 마찰이 증가하고, 그에 따른 공기저항이 발생하여, 위성의 수명이 짧아질 수 있으므로 무한히 고도를 낮출 수는 없다[19].
다섯째, 우주개발은 큰 비용이 들어가는 사업으로 적절한 비용과 그에 대한 효과를 창출해야 한다. 위성시스템을 개발하는 데에는 천문학적인 비용이 필요하며, 최소한의 비용으로 최대의 효과를 내는 것을 목표로 하는 군 무기체계 사업 특성상 사업비용을 고려하여 요구되는 제원과 임무 특성에 적합한 위성시스템을 설계해야 한다.
3.2 초소형 위성(Micro satellite)
위에서 설명한 요구조건을 충족하기 위한 현실적인 대안은 초소형 위성의 사용이다. 인공위성은 크기 및 무게에 따라 대형, 중형, 소형, 초소형, 나노, 피코, 펨토 위성으로 나뉜다[20]. 무게 10∼100 kg의 초소형 인공위성은 인공위성이 갖춰야 할 일반적 기능은 모두 다 갖추고 있으면서 일반적인 중대형 인공위성 보다 크기와 무게가 적고, 개발비용과 기간이 짧다. 대형위성인 다목적실용위성 3A호의 경우 개발 기간은 8년, 개발비용은 2,359억 원이 소요되었다[21]. 반면 초소형 위성은 개발 기간이 3년 이하로 짧고 개발비용은 수억 원 ∼ 수십억 원 정도로 저렴하다[22]. 본 연구에서 초소형 위성을 그 대상으로 하는 논리가 여기에 있다.
3.4 워커-델타 위성군(Walker-Delta Constellation)
위성군을 설계할 때 전통적으로 사용되는 방식은 워커-델타 위성군 설계방식이다. 워커-델타 위성군 설계방식은 전체 위성 수, 정해진 궤도 기울기, 고도를 결정하여 전체 위성 수보다 작거나 같은 수의 동일한 궤도를 적도면을 기준으로 균등하게 배치하는 방법이다[25]. 따라서 이 위성군은 전 지구에 고르게 분포되기 때문에 특정 지역보다 지구 전 지역을 대상으로 한 정찰에 효과적이다. 이 위성군의 위성들은 궤도 기울기와 고도는 같고, 전체 위성 수 t, 동일한 위성 궤도면의 수 p, 인접한 궤도들의 위상차 변수 f가 핵심 변수로 표현식은 (1)과 같다[25].
3.4.1 워커-델타 위성군을 활용한 분석
우리는 먼저 워커-델타 위성군 설계방식을 이용하여 위성군을 설계하여 군 정찰위성의 필요조건을 충족하는지에 대해 분석해보았다. 워커-델타 위성군은 궤도 기울기와 전체 위성 수를 고정하여도 나머지 2개의 변수로 많은 위성군을 만들 수 있다.
하나의 위성군을 구성하여 예로 들어보자. 고도 510 km, 경사각 45°, 시야각 45°의 광학카메라를 적용한 인공위성 24개를 가지고 f값을 0으로 고정한 채 워커-델타 설계 방법을 이용하면 8가지 위성군이 설계된다. 이를 하루 동안 북한 전 지역에 대해 재방문주기를 STK로 분석하면 Table 1과 같다.
Table 1.
Return visits to all regions of North Korea with Walker-Delta constellation
한 궤도면에 24기의 모든 위성을 배치한 A 위성군의 경우 최소 재방문주기는 짧으나, 최대 재방문주기는 매우 길다. 그 이유는 모든 위성이 한 궤도에 있기 때문에 궤도면이 한반도를 지나갈 땐 짧은 재방문주기로 방문할 수 있으나, 궤도면이 한반도를 지나가지 않는 경우에는 매우 긴 재방문주기가 도출되는 것 이다. A 위성군은 worst-case 시 가장 긴 재방문주기를 가지기 때문에 군사용으로는 부적합하다고 할 수 있다.
한편 모든 위성이 각자 궤도를 이루는 H 위성군은 최소 재방문주기가 매우 짧다. 그 이유는 위성이 각기 다른 궤도에 있어서 한 위성이 지나간 후 다른 궤도에서 위성이 진입할 수 있기 때문이다. 그러나 평균 재방문주기로 보아 이러한 짧은 재방문이 자주 일어난다고 볼 수는 없다.
평균 재방문주기를 고려하면, A 위성군이 선호되고, 최소 재방문주기를 고려하면 H 위성군이 선호된다. 그리고 최대 재방문주기를 고려하면 F 위성군이 선호된다. 이처럼 각각의 위성군은 다른 특징을 가지고 있으며, 위성군 설계 시 임무에 따라 선호되는 위성군의 특징은 다를 것이다. 하지만, 워커-델타 위성군은 모두 재방문주기의 최소값과 최대값의 편차가 크다는 점에서 좋은 안정성을 가졌다고 보기 어렵다. 또한, 워커-델타 위성군은 각기 다른 방향에서 목표 상공을 통과하기에 방문 시 관측 지점과 범위가 일정하지 않다. 따라서, 지구 전체에 고르게 분포된 이 위성군은 지구 전체를 관측하는 데에는 효과적이지만, 한반도라는 특정한 지역을 관측하기에는 실효성에 한계점이 있다. 우리는 이러한 문제를 보완하고 한반도의 지속적이고 안정적인 관측을 위해 태양동기궤도를 이용한 위성군 설계를 제안하고자 한다.
3.5 제안하는 방법론(BB 위성군): 태양동기-지상반복궤도 위성군 설계
태양동기궤도는 궤도평면과 태양 사이의 각이 일정하게 유지되어, 궤도에 일정한 지방시가 존재한다. 지방시(LTAN, Local Time of Ascending Node)란 위성이 지구의 남반구에서 북반구로 올라오면서 통과하는 위성 궤도면과 지구 적도면과의 교점인 승교점(Ascending Node) 지역의 시간을 말한다. 위성 궤도면은 우주에서 작용하는 여러 힘으로 승교점이 서쪽에서 동쪽으로 변한다[26]. 특히, 지구의 적도반경과 극반경의 차이에 의한 J2 섭동력(Perturbation Force)이 가장 주된 요인이다. 이때, 승교점의 위치변화 속도와 지구의 태양 공전 속도가 같으면 궤도평면과 태양과의 각이 일정하게 유지되는데, ‘궤도가 태양과 동기화되어 있다’ 하여 이를 태양동기궤도라 한다.
본 연구에서 제시하는 방법론은 태양동기궤도의 지방시(승교점)를 변경하며 배치하는 위성군이다. 우리 는 태양동기궤도를 활용한 위성군 설계를 위한 가정사항 및 요구조건을 나열하였고, 1단계에서부터 4단계까지의 태양동기-지상반복궤도 위성군 설계 방법론을 제시하고자 한다.
3.5.1 가정사항
BB 위성군의 설계 간 가정사항은 다음과 같다.
① 설계하는 궤도는 이심률이 ‘0’인 원형궤도이다.
② 우주 섭동력은 지구 편평도에 의한 J2 섭동만을 고려한다.
③ 배치되는 인공위성은 50∼100 kg급 초소형 인공위성이며, 고도는 실제 초소형 위성들이 운용 중인 420∼570 km, 탑재체의 시야각은 45°이다.
④ 모든 궤도 설계와 계산은 STK를 사용하며, 분석기간은 2019년 7월 1일 00:00:00(UTC)부터 2019년 7월 31일 00:00:00(UTC)이다.
⑤ 하루는 지구의 절대적인 자전주기(태양이 남중하는 시각부터 다음번 남중 시각까지의 간격)로 23시간 56분 4초이다.
⑥ 위성의 한반도 방문 판단기준은 평양의 한 지점이 탑재체의 시야에 들어오는 것이다.
3.5.2 요구조건
본 연구에서 설계할 위성군의 요구조건은 다음과 같다.
① 목표지역에 대해 안정적이고 지속적인 감시정찰을 할 수 있어야 한다.
② 목표지역은 우리 군의 주관심 지역인 군사분계선 이북이 대상이다.
③ 위성의 탑재체는 영상물의 식별 및 분석이 쉬운 광학카메라이다.
④ 광학카메라의 관측을 고려, 관측(임무)시간은 매일 08:00∼17:00이다.
⑤ 재방문주기는 30분으로 정한다. 다만, 본 연구에서는 위성군 설계 방법을 연구한 것으로, 향후 본 연구의 설계 방법론을 토대로 다른 재방문주기를 가진 위성군을 설계할 수 있다.
3.5.3 위성군 설계 1단계: 위성고도 z 계산
Curtis(2013)에 의해 궤도의 장반경 r은 (2)와 같이 성립한다[27]. 이때, v는 위성의 운동속도, μ는 지구중 력상수이며 그 값은 398600 km3/s2와 같다. e는 이심률, i는 궤도 기울기이다.
이심률 e = 0인 원궤도에서 운동속도 v는 (3)과 같이 성립한다.
원궤도를 도는 위성이 한 바퀴 돌 때 움직인 거리가 원주일 때, 공전주기 T는 (4)와 같다[27].
이때, r은 지구반지름 RE과 위성 고도 z의 합이며(i.e.,r = RE+z), (5)와 같이 정리할 수 있다.
이를 z에 대해 정리하면 (6)과 같고, T를 입력하여 z를 구할 수 있다.
3.5.4 위성군 설계 2단계: 지상반복 공전주기 T 계산
위성이 정해진 시각에 매일 같은 지점을 지나기 위해 위성 공전주기의 배수는 하루(약 24시간)가 되게 공전주기를 설정한다. 계산을 위해 하루를 1,440분으로 두고 이것의 정수인 약수를 구하면 총 36개의 약수가 구해진다. 이 모든 약수가 위성 공전주기 T 가 될 수 있으며, (6)에 대입하여 Table 2와 같이 고도 z를 구한다. 이때, 음수인 값은 지구 표면 아래를 뜻하므로 의미 없으며, 가정사항 ③을 토대로 적절한 고도는 96분 주기의 566.8 km으로 판단할 수 있다.
3.5.5 위성군 설계 3단계: 단일 태양동기궤도 설계
STK의 궤도 마법사(Orbit Wizard)를 이용하여 태양동기궤도 위성을 표현한다. 이때 궤도형태는 태양동기궤도, 고도는 z값을 입력한다. 지방시(LTAN)는 임무 시작시각인 08:00를 입력한다.
이때 z값은 앞서 구한 566.8 km나, 지상궤적을 반복하는 정확한 고도 도출을 위해 고도를 변경하며 궤도를 설계, 분석 기간 중 같은 시각에 위성 위도 및 경도 값의 평균 변화량을 Table 3과 같이 분석하였다. 고도를 바꿔가며 궤도를 설계하고 분석하는 이유는 단위시간이 지난 후 위성이 위치가 바뀔 때 이는 위성의 공전 속도와 고도에 직접적 관계가 있기 때문이다. 이러한 실험적 분석을 수행한 결과, 고도 561 km 에서 위성의 위도, 경도 변화량이 가장 적은 것을 확인하였다.
Table 3.
Average gradation of daily position of satellite with respect to z(km)(altitude)
| z(km) | 566.8 | 561.1 | 561.05 | 561 | 560.95 | 560 |
| Δ Lat(deg) | −1.412 | −0.122 | −0.064 | -0.007 | 0.050 | 1.123 |
| Δ Lon(deg) | 6.290 | 0.023 | 0.012 | 0.001 | −0.010 | −0.489 |
한편, STK는 태양동기궤도를 표현할 때, 설정한 분석 기간의 시작점을 기준으로 표현한다. 즉, 분석 시점이 2019.7.1. 00:00:00일 때, 지방시 08:00의 궤도는 분석 시점에 08:00인 지역의 승교점이 위성의 시작점이다. Fig. 2처럼 위성의 초기 위치는 승교점인 적도에 위치하게 되고, 이때 표현되는 궤도의 위성은 한반도를 지나지 않는다.

STK에서 궤도가 한반도를 지날 때 평양의 한 지점이 탑재체의 시야에 들어오기 시작하도록 진근점이각을 입력하여 위치를 수정한다. 진근점이각(True Anomaly) 이란 위성이 타원궤도에서 근지점으로부터 위성까지의 각을 말한다. 본 연구에서 사용되는 궤도는 원궤도이기 때문에 근지점이 없으며, 진근점이각은 위성의 시작점으로부터 변경된 위치까지의 각을 의미한다. Fig. 3과 같이 수정한 위성의 진근점이각은 260°이다. 다만, 이는 분석 시점에 따라 변할 수 있다. 이로써 매일 08:00에 한반도를 방문하는 하나의 태양동기궤도가 그려진다.

3.5.6 위성군 설계 4단계: 태양동기-지상반복궤도 위성군 설계
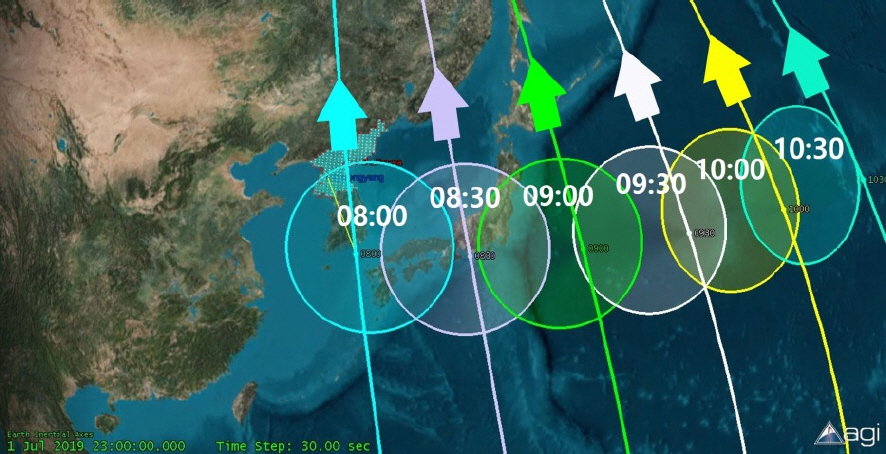
설계한 단일 태양동기궤도를 기준으로 30분마다 다음 궤도가 한반도 상공을 진입하기 위해 기울기, 고도가 같은 태양동기궤도의 지방시를 30분 간격으로 바꿔가며 08:00부터 17:00 지방시 궤도까지 총 19개의 궤도를 생성한다. 이때 전 궤도에 진근점이각을 260°로 부여하면 첫 번째 08:00 궤도의 다음 궤도가 한반도 상공에 있을 때 앞선 궤도와의 지방시 차이만큼 더 진행된 위치에 있게 된다. 예를 들어, Fig. 4처럼 08:30 궤도의 진근점이각을 260°로 설정하면 위성은 궤도가 한반도 상공을 지나기 30분 전인 08:00에 한반도의 위도를 지나고, 궤도가 한반도 상공을 오게 되었을 때는 이미 위성은 30분 더 진행한 곳에 있게 된다.
따라서 08:00 궤도를 시작으로 다른 궤도들은 차례로 30분씩 지연시키는 위상차 x를 적용한 진근점이각을 입력해야 한다. 다른 궤도들의 위상차 x를 구하기 위해 (10)을 이용한다. 이때, 지상반복을 위한 고도 561 km를 (6)에 의해 구한 공전주기는 95.878분이다.
(12)와 같이 각 위성 간 위상차는 112.6431°씩 벌어지며, 이를 각 궤도마다 진근점이각에 더하여 입력하면 주간시간 08:00 ∼ 17:00에 한반도 상공을 30분 간격으로 통과하는 위성군을 설계하게 되며 Fig. 5와 같다. 앞서 기술한 바와 같이, 이 궤도가 지구를 기준으로 생긴 형태가 비치볼과 유사하여 BB(Beach Ball) 위성군으로 명명하였다.

실험 및 분석
4.1 태양동기-지상반복궤도 위성군과 다른 설계방식과의 비교
본 장에서는 3장에서 설계한 태양동기-지상반복궤도 위성군(BB 위성군)과 워커-델타 위성군, 다목적실 용위성 시리즈의 한반도 관측능력을 비교하였다. 비교 대상으로 선택한 워커-델타 위성군은 관측 해상도의 동일한 조건을 위해 BB위성군과 같은 고도와 한반도를 관측하는데 효과적인 45°의 경사각을 지니며, 총 위성 수가 유사한 위성군 중 재방문주기가 짧은 워커-델타 위성군 1(이하 WD1)과, 같은 조건에 재방문주기가 유사한 위성군 중 전체 위성 수가 적은 워커-델타 위성군 2(이하 WD2)이다. 다목적실용위성 시리즈(이하 KOMPSATs)는 한반도의 집중적인 관측을 위해 만들어진 위성이라는 측면에서 BB위성군과 비교할 가치가 있다. KOMPSATs는 현재 3, 3A, 5호가 운용 중이며, 각 위성은 서로 독립적으로 운영되어 위성군의 개념과 거리가 있으나, 한반도를 집중적으로 관측한다는 임무목적은 동일하기 때문에 이들을 하나의 위성군으로 간주하여 위성의 임무 목적에 맞게 한반도 전 지역을 대상으로 BB위성군과 비교하였다. 다만, KOMPSATs는 다른 위성군과 다르게 대형위성이라는 점에서 수치를 바탕으로 한 단순 비교는 한계가 있다고 할 수 있다.
비교방법은 이 위성군들에 대하여 주간시간 기준의 한반도 재방문주기, 관측 소요시간, 하루평균 관측횟수를 비교하였다. 주간시간을 기준으로 정한 이유는 본 연구에서는 위성 탑재체와 위성군의 특성상 주간시간에 초점을 두고 위성군을 설계했기 때문이다. 결과는 Table 4와 같다.
Table 4.
Comparison of Walker-Delta, KOMPSAT series and BB constellation
WD1은 BB위성군 대비 최소, 평균 재방문주기가 짧으며, 최대 관측 소요시간이 길다. 그리고 주간 시간의 방문횟수가 많다. 반면 최대 재방문주기가 매우 크며, 위성의 진입하는 위치와 각도가 매번 다르므로 재방문주기와 관측 소요시간이 일정하지 않고, 최소 관측 소요시간은 3초로 매우 짧다는 점이 단점이다.
WD2의 장점은 BB위성군(19대)보다 적은 위성으로(16대) BB위성군보다 짧은 최소, 평균 재방문주기를 구현해 낼 수 있다. 하지만, WD1과 동일한 단점을 갖는다. 또한, 주간시간 방문횟수는 18.44회로 BB위성군보다 적다.
KOMPSATs는 3기의 독립적인 위성으로 구성되었기 때문에 재방문주기가 다른 위성군에 비해 길고, 관측대상이 한반도 전지역으로 관측 소요시간이 길게 나타난다. 하지만, 독립적인 위성운용에 따라 관측에 관한 표준편차가 매우 크게 나타나는 단점이 있다.
KOMPSATs는 3기의 독립적인 위성으로 구성되었기 때문에 재방문주기가 다른 위성군에 비해 길고, 관측대상이 한반도 전지역으로 관측 소요시간이 길게 나타난다. 하지만, 독립적인 위성운용에 따라 관측에 관한 표준편차가 매우 크게 나타나는 단점이 있다.
4.2 태양동기-지상반복궤도 위성군의 장점
같은 대수의 위성을 이용하면 워커-델타 위성군이 더 짧은 재방문주기를 만들 수 있으며, 더 적은 수의 위성으로 BB위성군과 비슷한 재방문주기를 가질 수 있으므로 BB위성군의 실효성에 의문을 가질 수 있다. 하지만, 재방문주기가 모두 30:02로 같은 점은 이 위성군의 장점이라 할 수 있다. Table 4와 Table 5를 보면 다른 위성군의 재방문주기가 일정치 않고 표준편차가 크지만, BB위성군은 재방문주기가 일정하여 안정성 측면에서 큰 장점을 지닌다. 관측 소요시간도 다 른 위성군은 일정치 않지만, BB위성군은 일정하여 매관측마다 한반도 남쪽에서 북쪽으로 지나는 일정한경로로 진입하여 관측을 수행한다 할 수 있다.
Table 5.
Dynamics of revisit time and observation time of Walker-Delta, KOMPSAT series, and BB constellation
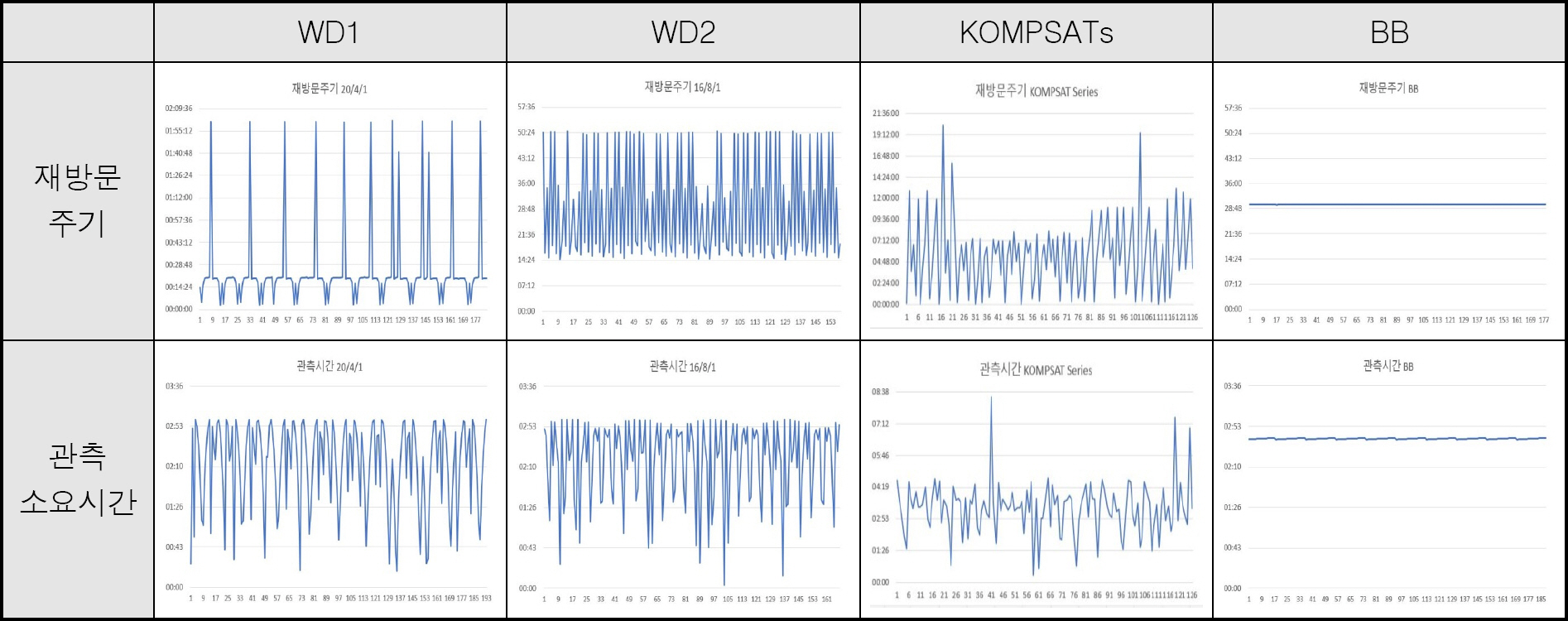
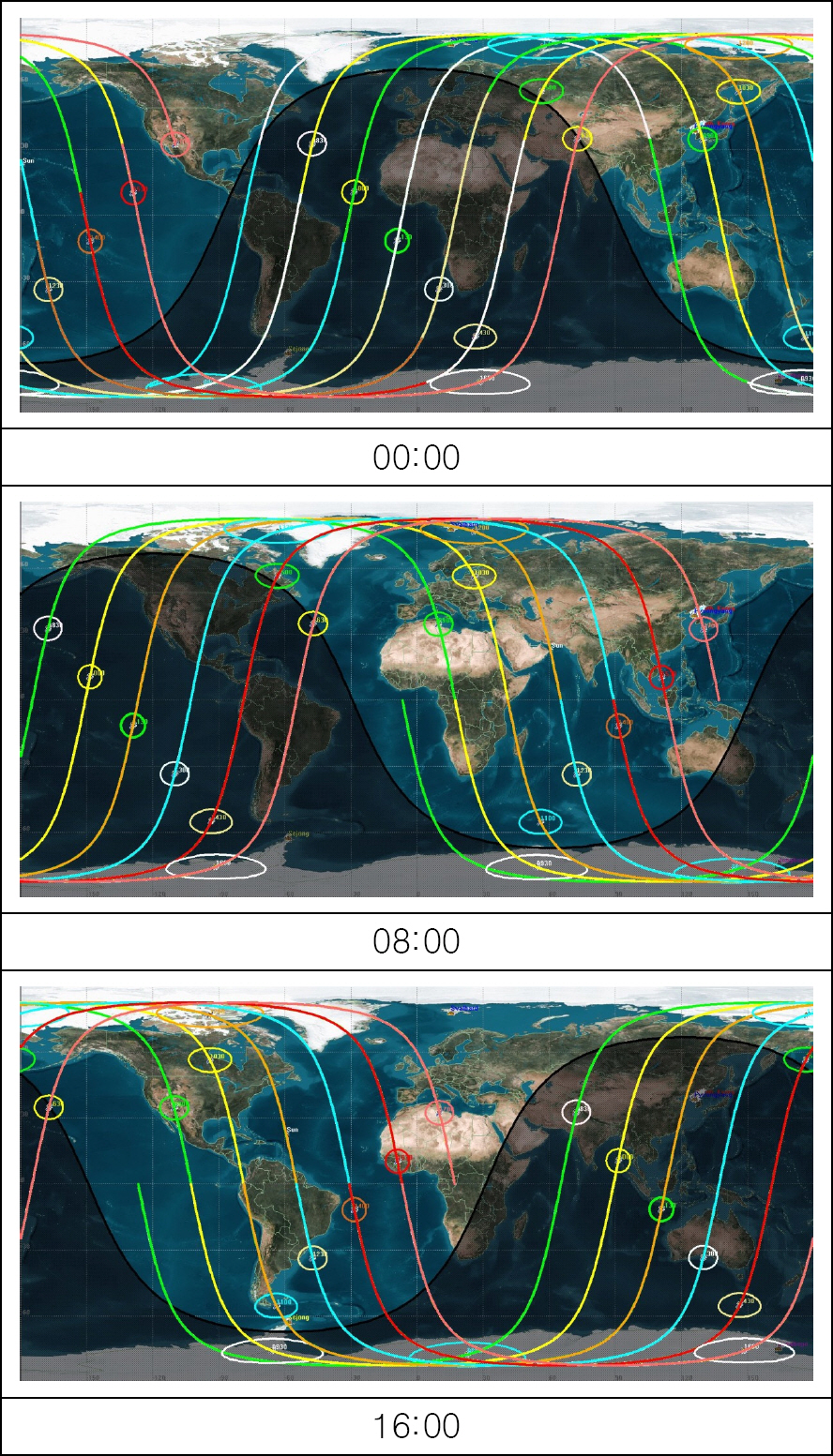
Fig. 6은 분석 시작 시점의 지상궤적을 2차원으로나타낸 그림이다. 이 궤도들은 시간이 지날수록 이동하여 변한다. 하지만 BB위성군은 태양동기궤도를 적용하였기 때문에 시간이 지나도 태양과 지구의 위치적 관계는 유지되며, 하루를 주기로 같은 지점을 통과하도록 고도를 설계하였기 때문에 한반도를 관측하기위해 상승하여 진입하는 궤도의 위치와 기울기는 변하지 않는다.
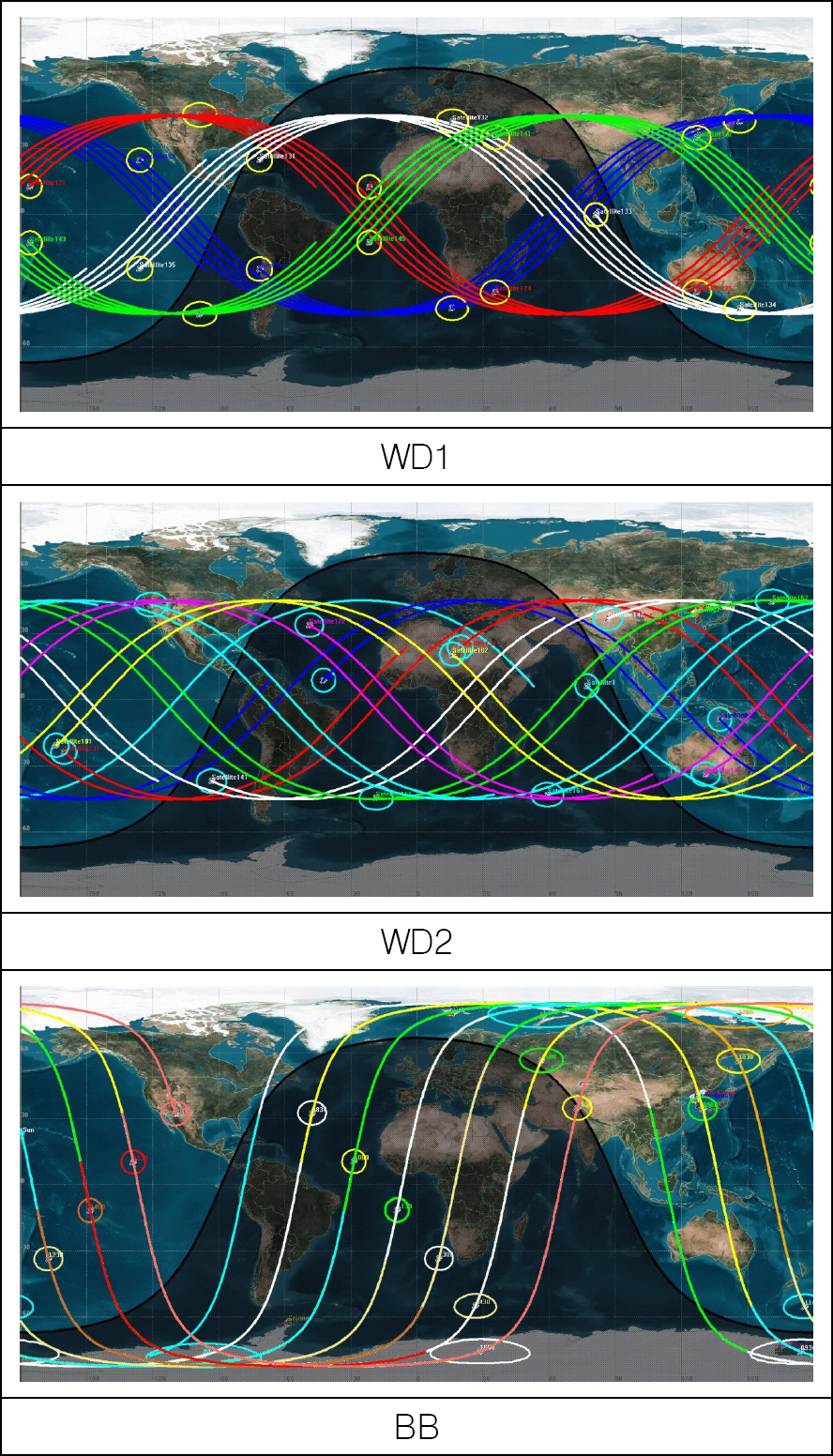
Fig. 7은 하루 중 시간별로 BB위성군의 지상궤적을2차원으로 나타낸 그림이다. 이것으로 한반도가 아닌지역에 대해서도 위성군이 지남을 알 수 있는데, 이위성군은 매일 같은 시각과 장소를 관측하도록 설계한 특성이 다른 지역에도 적용되기 때문에 이 위성군이 지나는 영역에 대해서 반복감시가 가능하며 이는그 지역에 대한 변화탐지가 가능하다는 의미이다.
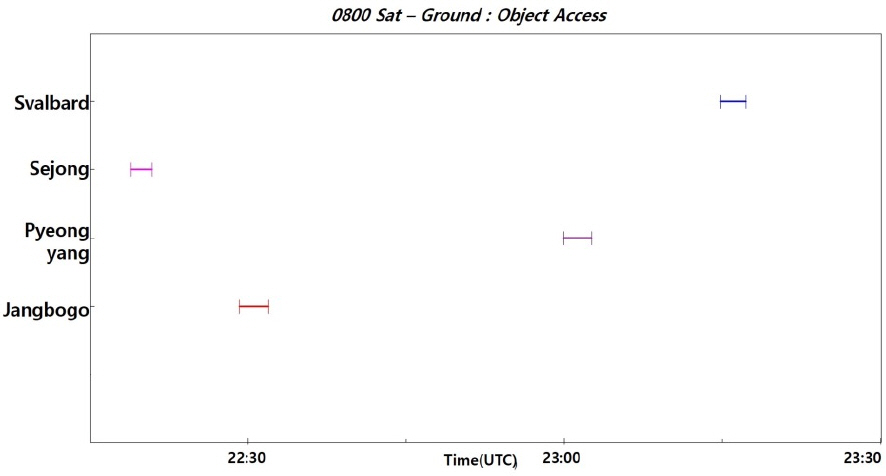
그리고 정찰위성의 임무 단계는 ①지상국으로부터명령(주요관측 대상 등) 수신(Uplink), ②촬영 준비, ③영상 촬영, ④이미지 전처리(Post-processing spacecraft),⑤데이터 송신(Downlink)으로 구분 할 수 있다[28]. 만약 위성과 교신하는 지상국이 한반도에만 있다면 ①,⑤단계가 한반도 지역에서 수행되어 촬영시간에 영향을 준다. 하지만, BB위성군은 극궤도를 사용하는 태양동기궤도 위성이기 때문에 남·북극을 항상 지난다.만약 이곳의 지상국과 교신하게 되면 임무 지역에서 의 촬영시간을 최대한 사용할 수 있다. 북극에는 극궤도 위성들이 보편적으로 사용하고 있는 스발바르 위성 교신국(Svalbard Satellite Station)이 있다[29]. 남극에는 국내 극지 연구 및 위성통신을 수행하는 남극세종과학기지와 남극 장보고 과학기지가 있다[30,31].
Fig. 8은 BB위성군의 08:00 지방시 위성의 임무 스케쥴을 표현한 것으로, 남극 세종기지와 장보고 기지를 지난 후 평양을 지나고 이후 북극의 스발바르 기지를 지난다. 따라서, BB위성군은 한반도를 지나는 전·후 남극과 북국에서 지상 교신이 가능하여 한반도에서의 관측시간을 최대한 사용할 수 있는 장점이 있다.
결 론
본 연구는 군 정찰자산이 필요로 하는 짧은 재방문주기, 비용 대 효과 창출, 뛰어난 안정성, 임무 지역에 대한 반복 및 지속적인 감시, 높은 해상도 총 5가지 필요조건을 만족하기 위한 초소형 위성군을 설계하였다. 본 연구에서 설계한 태양동기-지상반복궤도 위성군은 30분의 짧은 재방문주기를 가지면서, 군용 우주 자산 획득사업 추진 시 최소한의 비용으로 최대의 효과를 창출하기 위해 개발 기간이 짧고 경제적인 초소형 위성을 적용하였다. 또한, 예측할 수 없는 우주 공간의 특성, 최악의 상황을 항상 고려해야 하는 군사작전 수행을 위해 뛰어난 안정성을 지닌 위성군을 설계하였다. 이 위성군은 매일 주간시간 8시부터 17시까지 30분 간격으로 한반도 지역을 동일하게 지나, 지속적인 반복감시가 가능하며 높은 해상도를 위해 지상반복이 가능한 가장 낮은 고도인 561 km를 도출하였다.
본 연구는 우주물체 분석 프로그램인 STK를 이용하여 매일 같은 시각과 위치를 지나는 태양동기성과 지상반복성을 지닌 궤도를 지방시(승교점)를 변화시켜가며 다수로 설계하였다. 이를 통해 재방문주기를 직접 위성군 설계에 반영할 수 있었다. 위성군 설계 시에는 지방시 08:00 위성을 시작으로 설정한 재방문주기 30분 간격으로 지방시 17:00까지 총 19개의 위성 궤도를 설계하였다.
이 위성군을 보편적으로 위성군 설계에 사용되는 워커-델타 위성군과 실제 한반도 관측임무를 수행하고 있는 다목적실용위성 시리즈와 비교하였다. 그 결과, 워커-델타 위성군1(i.e., WD1)은 BB위성군과 비슷한 수의 위성으로 최소, 평균 재방문주기가 짧고, 최대 관측시간과 방문횟수가 많았다. 워커-델타 위성군2(i.e., WD2)는 BB위성군과 비슷한 재방문주기를 가지지만 위성 수는 16대로 더 적었으며, 최소, 평균 재방문주기가 짧고 최대 관측시간이 길었다. 다목적실용위성 시리즈(i. e, KOMPSATs)는 독립적으로 운용되기 때문에, 재방문주기가 다른 위성군에 비해 길게 나타나며, 관측대상이 비교적 넓어 관측시간은 다소 길었다. 하지만, 큰 최대 재방문주기로 인해 세가지 위성군은 한반도 관측에 큰 공백이 있었으며, 한반도로 진입하는 방향(워커-델타에 해당)과 재방문주기가 다르므로 임무 지역에 대한 지속적인 반복감시와 안정적인 임무 수행에 제한점이 식별되었다.
한편, 태양동기-지상반복궤도 위성군인 BB위성군의 경우, 재방문주기와 관측 소요시간은 0에 가까워 매우 일정하였다. 따라서, BB위성군은 한반도 지역에 대한 지속적인 반복감시가 가능하고, 관측 임무에 대한 변수가 적어 안정적인 정찰이 가능하다고 평가할 수 있다.
또한, 안정적인 BB위성군의 궤도 특성에 따라 이 위성군이 지나가는 다른 지역에 대해서도 관측할 수 있기에, 전 지구적인 관심 지역에 대한 지속적인 반복감시와 변화탐지가 가능한 임무의 확장성을 가지고 있다 할 수 있다. 그리고 이 위성군은 한반도 방문 전·후 남극과 북극에 있는 지상국을 방문할 수 있기에 지상국과의 교신을 통해 명령 전달(Uplink), 촬영 영상 전송(Downlink)을 수행하여 한반도 상공에서 촬영시간을 최대한 확보할 수 있다.
이 연구를 통해서 개발된 태양동기-지상반복궤도 위성군 설계 방법론은 향후 안정적이고 지속적인 관측이 가능한 군용 정찰위성 획득 시 위성군 운용개념 수립에 활용될 수 있을 것이다.




