



서 론
최근 무인체계 기술의 급격한 발전으로 무인체계를 하나의 체계가 아닌 복합체계로 활용하는 미래 전장환경에 대한 관심이 높다. 무인체계 활용 초창기에는 1:1 원격통제 기반 제어를 통해 임무 수행을 위한 단순 작전 도구 정도로 활용되었으나 관련 기술의 발전으로 독립적인 단일 무기체계에서 복합체계까지 그 활용범위가 확대되고 있다. 즉, 무인체계는 다양한 임무를 수행하는 다수 로봇이 서로 상호 연계하여 전투의 효율성과 생존성을 극대화하는 복합시스템으로 활용할 수 있다. 또한 무인체계는 기존 유인 전투제대에 포함되어 다양한 작전 임무 수행뿐만 아니라 유인체계와의 상호협력 형태로 결합된 유․무인 복합체계로의 운용도 가능하다[1,2]. 이러한 복합체계로 무인체계를 활용하기 위해서는 다수의 로봇을 효과적으로 통합 운용할 수 있는 임무통제 시스템이 필수적이며 관련 연구가 국방과학연구소 중심으로 활발하게 진행되고 있다[3-6]. 기존 연구 중 [3]에서는 로봇 임무통제 개념을 수립하고 임무를 단위과업의 조합으로 정의하여 임무계획을 생성하는 과업기반 임무계획 기술을 제안하였으며 [4,5]에서는 로봇과 과업과의 관계를 고려하여 과업을 수행해야 하는 로봇들을 결정하는 과업-로봇 적합도 기반 최적할당 기법에 관한 연구가 수행되었다. 또한 작전지역에 대한 가동성, 위협성, 통신성 정도에 대한 분석정보를 자동으로 분석하여 상황도에 가시화하거나 경로계획 생성 시 활용하는 연구도 있다[6]. 이러한 연구들은 임무통제 시스템 구성 기술의 지능화 수준을 고도화하려는 연구이다. 하지만 로봇의 임무통제를 수행함에 있어 임무통제 시스템이나 로봇 플랫폼 구성기술들의 지능화 수준이 아무리 고도화되어도 운용자의 감독 및 제어를 위한 상호작용은 여전히 필요하며 결국 운용자의 능력에 따라 임무 수행 결과에 영향을 주게 된다. 이처럼 상호작용 기반의 제어방식은 운용자의 높은 지식수준을 요구하고 운용자가 컴퓨터와 연결되어 긴밀하게 상호작용하는 과정을 통해 제어하는 방식으로 Fig. 1과 같은 인간 감독 제어 방식이라고 한다[7].

즉, 성공적인 임무수행을 위해서는 지능화된 기능의 적용뿐만 아니라 능력이 뛰어난 운용자의 역할도 중요하다. 하지만 이러한 신뢰성 있는 운용자는 고도로 훈련되어 로봇 운용능력이 뛰어난 운용자임에도 불구하고 실제 전장상황에서는 다양한 이유로 운용능력의 변화가 올 수도 있다. 특히 1:N 통합운용 시에는 보다 높은 운용자 작업 부하가 잠재되어있어 운용자 운용능력 변화의 영향이 크다고 할 수 있다. 따라서 임무통제 시스템 주요 기능에 지능화된 기술 적용만으로는 다중로봇 통합운용 시 그 효과가 다소 반감되므로 운용자의 운용능력 변화를 고려한 새로운 형태의 임무통제 시스템 설계가 필요하다.
본 논문에서는 운용자의 운용능력 변화에 따라 임무통제 시스템의 지능화 수준을 조절하여 다중로봇 통합운용을 지원하는 적응형 임무통제 아키텍처 설계 방법을 설명한다. 이를 위해 운용자의 운용능력을 감독 및 제어 측면으로 구분하여 다중로봇 통합운용에 있어 운용자 업무부하와의 관련성을 이해하고 운용자 업무부하를 효과적으로 분배함으로써 효과적인 다중로봇 통합운용을 가능케 하는 적응형 임무통제 시스템을 위한 아키텍처 설계 방법을 제안한다.
본 논문의 구성은 다음과 같다. 2장에서는 로봇 임무통제 단계 및 구성기술을 소개하고 3장에서는 임무통제 시 운용자의 인지적 자원이 소비되는 영역인 감독 및 제어를 기준으로 임무통제 자율화 수준을 정의하고 정량화 하는 방법을 소개한다. 그리고 4장에서는 구현 결과 및 시나리오 기반 실험 방법을 제시한다. 마지막으로 5장에서는 결론을 기술한다.
임무통제 단계 및 구성기술
로봇 임무통제 시스템은 Fig. 2처럼 단일로봇 통제를 위해 분석, 계획, 실행 및 관리, 평가 단계가 순차적인 루프를 따라 작동하며 운용자는 전 단계에서 감독 및 제어 활동을 수행한다.
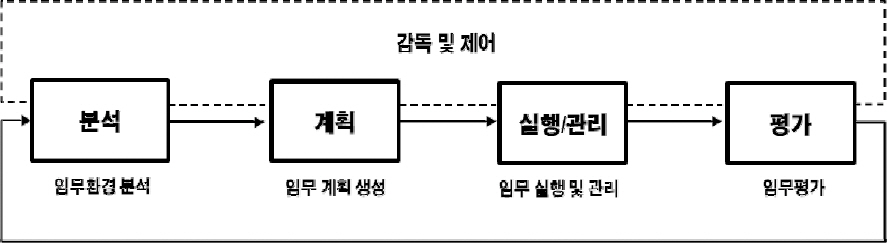
분석 단계는 무인로봇에 대한 임무를 계획하기 이전 디지털 지도, 각종 군대부호, 상위망 연동 등을 기반으로 임무계획에 필요한 준비, 분석 및 환경을 구축하는 단계이다. 구성기술로는 상위망 연동기술, 상황도 구축기술, 이동예정 경로 분석기술, 전장표적에 대한 가공 및 융합기술 등을 포함한다. 계획단계는 무인로봇을 위한 임무계획을 수립하고 사전 모의하는 단계로 로봇 별 단일 과업의 조합으로 임무계획을 생성한다. 구성기술로는 임무계획 생성 기술, 과업할당 기술, 광역경로계획 기술, 임무모의 기술 등을 포함한다. 실행단계는 장입된 임무계획에 따라 로봇 운용 간 실시간 임무통제 단계로 임무 재계획 기술, 임무할당 기술, 협업임무기술등을 포함한다. 마지막 평가단계는 임무수행 후 임무의 달성도 평가 및 추후 유사 임무 계획 수립 시 참조 또는 재활용을 위하여 관련된 임무수행 결과를 저장하고 분석하는 단계로 임무결과 저장/분석 기술과 통합운용을 위한 운용자 인터페이스 구성기술 등을 포함한다.
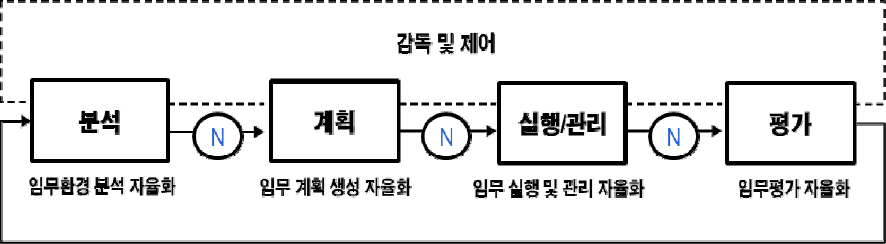
단일로봇 임무통제 단계를 다중로봇 운용에 적용하기 위해서는 구성기술 자율화 기능의 고도화가 필수적이다. 하지만 로봇의 임무통제를 수행하는 데 임무통제 시스템이나 로봇 플랫폼 구성기술의 지능화 수준이 아무리 고도화 되어도 운용자의 감독 및 제어를 위한 상호작용은 필요하며 결국 운용자의 능력은 임무수행 결과에 영향을 주게 되므로 Fig. 3의 구성기술 자율화 적용만으로는 그 효용성이 적다.
이는 로봇 임무통제 수행 시 운용자 업무부하 변화에서 기인하는 운용자의 운용능력 변화를 고려하지 않기 때문이다. 실제 운용자가 임무수행을 실시하는 데 다양한 요인에 의해 인지적 자원이 추가로 소비되는 즉, 업무 부하 증가로 지속적 임무 수행에 악영향을 끼치는 상황이 발생한다. 반대로 인지적 자원 소비가 감소되는 경우인 업무부하 감소의 경우는 추가 임무수행이 가능하거나 좀 더 세밀한 임무수행이 가능 할 수도 있다. 여기서 중요한 점은 업무부하가 상황에 따라 변화한다는 점과 이것이 임무수행에 영향이 있다는 점이다. 이를 인지적 자원이 추가로 소비되는 업무부하 증가의 일반적인 예를 들어 설명한다. 실제 전쟁 상황에서 운용자가 겪을 수 있는 예측 불가능한 스트레스(공포, 불안, 배고픔 등으로 인한 스트레스), 임무 수행 간 돌발상황 및 상급자에 의한 추가 지시사항 수행 등의 상황에 처한 운용자가 지속적인 임무수행을 위해서는 인지적 자원을 초과 투입해야 하는 상태가 된다. 따라서 이러한 업무부하 변화에 따라 임무통제 자율화 시스템의 자율화 수준을 변경하여 변화된 업무부하에 대응할 수 있다면 지속적 임무수행이 가능하다. 이때 업무부하 변화에 대한 인지 및 자율화 수준 변경은 운용자가 수행한다.
Fig. 4는 단일로봇 임무통제 단계를 다중로봇(1∼N) 임무통제가 가능하도록 단계별 자율화 수준을 차등 적용하여 변화된 업무부하에 대응이 가능한 적응형 임무통제 단계이다.
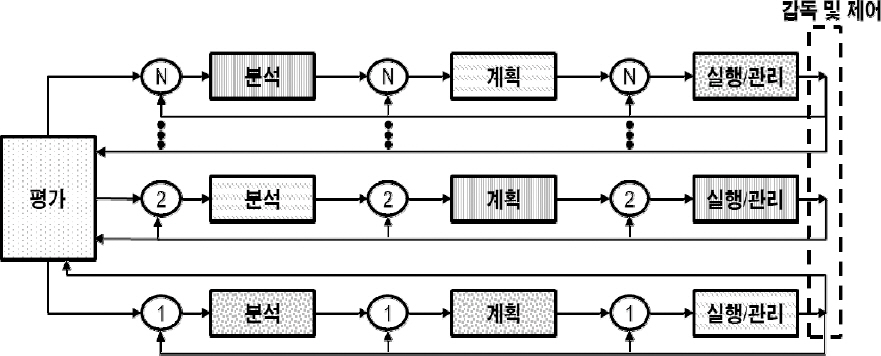
Fig. 4와 같이 단계별 자율화 수준의 차등 적용을 위해서는 자율화 수준 지표가 필요하며 이를 통해 임무통제 시스템의 자율화 수준과 운용자 업무 부하 간 관련성을 확인한다.
임무통제 자율화 수준
적응형 임무통제 시스템의 자율화 수준을 정의하기 위해 우리는 임무수행 시 인지적 자원이 소비되는 감독 및 제어 활동 측면에서 자율화 수준 지표를 정의한다. 일반적인 로봇 임무통제에서의 운용자 역할 및 구성은 전체적인 임무를 관리하고 통제하는 감독자와 실제 로봇의 운용을 책임지는 운용자로 구성된다. 하지만 제안하는 적응형 임무통제 시스템은 한 명의 운용자가 여러 대의 로봇을 운용하는 적응형 임무통제 시스템을 위한 아키텍처로 한 명의 운용자가 감독 및 제어 역할을 동시에 한다고 가정한다. 따라서 한 명의 운용자가 임무통제 시 인지적 자원이 소비되는 영역은 감독 활동 측면의 인간의 개입정도와 제어 활동 측면의 지능화 정도가 자율화 수준 지표가 된다. 이러한 지표는 더 상세한 수준으로 정의되며 그 내용은 다음과 같다.
3.1 자율화 수준 지표
먼저 감독 활동에서의 인간 개입정도 지표는 Fig. 5와 같이 적극적 감독, 제한적 감독, 자율적 감독으로 구분되며 상세한 내용은 아래와 같다.

• 적극적 감독: 운용자 승인을 통해 새로운 단계 진행 여부가 결정된다. 즉, 1. 분석: 운용자 결심 → 2. 계획: 운용자 결심 → 3. 실행: 운용자 결심 → 4. 평가와 같이 인간에 의해 끊긴 순환 루프형태가 된다. 이는 단계간 전이 과정에서 시스템의 의사결정 지원이 최소화된 통제 방식이며 이는 허가에 의한 관리방식이라 한다.
• 제한적 감독: 운용자 승인 없이 시스템 스스로 1. 분석: (필요시)운용자 결심 → 2. 계획: (필요시)운용자 결심 → 3. 실행: (필요시)운용자 결심 → 4. 평가 단계간 전이가 가능하나 운용자가 자율화 시스템의 행동을 감독하고 필요 시 언제든지 개입이 가능한 통제 방식이며 예외에 의한 관리방식이라 한다.
• 자율적 감독: 운용자 개입 없이 자율화 시스템의 1. 분석 → 2. 계획 → 3. 실행 → 4. 평가 단계가 모두 자율적으로 전이되며, 일단 자율화 시스템이 작동된 후에는 운용자와 소통하지 않으므로 자율화 시스템의 행동에 개입할 수 없게 된다.
다음으로 제어 영역에서 시스템의 지능화 정도 지표는 규칙형 제어, 논리형 제어, 지능형 제어로 구분되며 상세한 내용은 아래 Fig. 6과 같다.
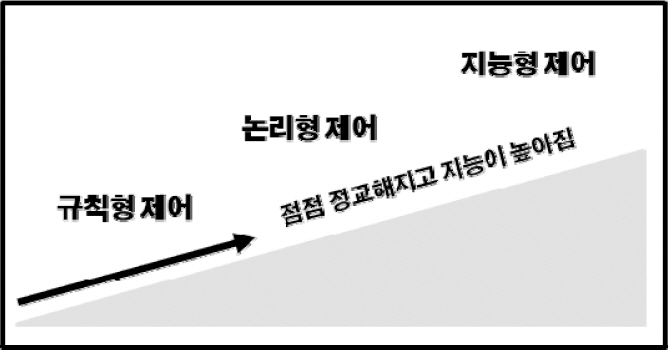
• 규칙형 제어: 기준 충족 기반으로 작업을 수행하여 단순한 임무처리가 가능한 지능화 정도를 말한다.
• 논리형 제어: 규칙 기반으로 작업을 수행하여 복잡한 임무처리가 가능한 지능화 정도를 말한다.
• 지능형 제어: 시스템 자체 결심을 통해 작업 수행이 가능한 지능화 정도 즉, 운용자가 임무목표는 정하지만 자율 시스템이 그 목표를 달성하기 위해 자율적으로 작업을 수행하는 목표 지향적 임무처리가 가능한 지능화 정도를 말한다.
정의한 감독 및 제어 측면에서의 자율화 수준 지표 에 따라 임무통제 자율화 시스템의 자율화 수준을 정 의하면 Table 1과 같다.
Table 1.
Level of autonomy
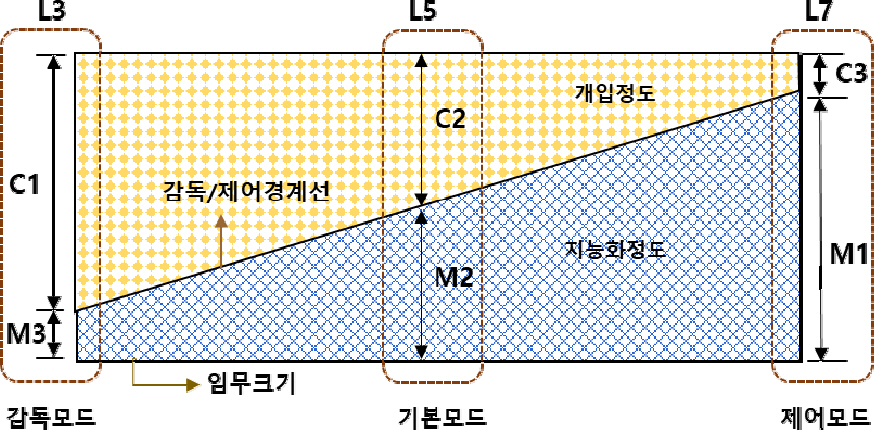
여기서 L3, L5, L7은 초기 설정을 위한 초기 설정 모드이며 나머지는 조정이 가능한 상세모드이다. 초기 설정모드는 Fig. 7과 같이 적극적 개입정도/지능형 지능화정도의 감독모드(L3), 제한적 개입정도/논리형 지능화정도의 기본모드(L5), 자율적 개입정도/규칙형 지능화정도의 제어모드(L7)로 정의되어 초기 선택이 가능하다.
3.2 자율화 수준 측정
정의된 자율화 수준은 Fig. 4 적응형 임무통제 단계에서 보듯이 임무통제 단계별 주요 구성기술에 차등 적용이 가능하고 이를 정량화된 값으로 임무통제 시스템의 자율화 수준 측정이 가능하다. 예를들어 Table 2와 같은 임무통제시스템의 자율화 수준이 적용되었다고 가정하여 그 과정을 설명한다. Table 2에서는 단계별 구성기술 중 주요 구성기술 2개씩(굵은 글씨) 식별하여 자율화 수준을 적용한다.
Table 2.
Level of autonomy(example)
본 논문에서는 임무통제 단계 및 주요 구성기술을 중요도, 복잡도, 위험도등을 고려하여 실행(40 %), 계획(30 %), 분석(20 %), 평가(10 %)로 점수를 배분하였으며 Table 2 임무통제 자율화 시스템은 실행단계(L1, L7), 계획단계(L3, L1), 분석단계(L1, L7), 평가단계(L7, L4)로 자율화 수준이 적용되었다.
범주형 데이터인 L1∼L9는 수치형 데이터로 변환 적용을 위해 우선 더미 변수(dummy variable)로 변환 후 단계별 최대점수로 식 (1)과 같이 정규화를 진행하여 자율화 수준 점수의 총합을 100으로 한다. 이때 지능화 정도 지표 M j = {j = 1:1, j = 2:2, j = 3:3}, 개입정도 지표 Ck = {k = 1:1, k = 2:2, k = 3:3}이며 더미 변수 dL i 값은 M j + C k 으로 계산한다.
여기서, N max는 정규화 최대값, N min는 정규화 최소값, S i는 원래값, Min tat 전체 최소값, Max tat 전체 최대값이다.
예로든 Table 2의 자율화 수준은 실행 단계 A 기술(L1), B 기술(L7)은 11.5점, 계획 단계 C 기술(L3), D 기술(L1)은 9점 분석 단계 E 기술(L1), F 기술(L7)은 6.5점, 평가 단계 G 기술(L7), H 기술(L4)은 5점으로 총합 32점이 최종 자율화 수준 점수이다.
3.3 가중치 기반 자율화 수준 측정
본 논문에서는 자율화 지표에 대한 가중치를 부여하여 자율화 수준을 계산하며 가중치 계산을 위해 자율화 수준 구조를 Fig. 8과 같이 정의한다.
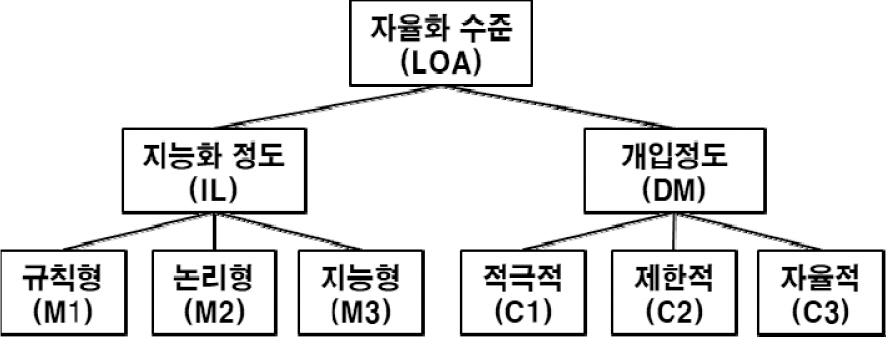
Fig. 8에서 형제 노드들 간의 쌍대비교행렬을 이용하여 가중치가 계산되며 쌍대비교행렬을 구성하는 값들은 매우중요(3점), 중요(2점), 보통(1), 중요하지 않음(1/2), 전혀 중요하지 않음(1/3)으로 전문가 집단을 통해 작성된다.
▸ 지능화 정도에 대한 상대 중요도(예)
- 실행 단계(ME)
- 계획 단계(MP)
- 분석 단계(MA)
- 평가 단계(MT)
▸ 개입 정도에 대한 상대 중요도(예)
- 실행 단계(ME)
- 계획 단계(MP)
- 분석 단계(MA)
- 평가 단계(MT)
중요도 지표를 이용하여 전문가 집단으로부터 획득한 상대 중요도 표는 가중치 계산을 위해 3x3 정방행렬 형태로 변환한다. 예로든 상대 중요도 표를 행렬 형태로 변경하여 작성하면 아래와 같다.
지능화 정도
개입정도
상대 중요도 표를 이용하여 변경한 행렬은 고유치(Eigenvalue)와 고유벡터(Eigenvector)를 이용하여 가장 큰 고유치를 갖는 고유벡터 값을 가중치로 결정한다. 고유치와 고유벡터는 식 (2)와 같이 정의된다.
여기서, A는 n × n 행렬, x는 n × 1 행렬이며 λ는 스칼라(scalar)이다. × ≠ 0 일 때 해를 구하면 λ값이 구해지며 이를 행렬 A의 고유치라 한다. 가장 큰 고유치를 식 (2)에 대입하여 계산하여 얻어진 n × 1 행렬 x가 행렬 A의 고유벡터가 된다. 가장 큰 고유치일 때의 고유벡터를 가중치로 적용하기 위해 고유벡터 원소의 합이 1이 되도록 한다. 즉, 상대 중요도 표를 이용하여 획득한 행렬들을 대상으로 고유벡터를 각각 구하고 이를 단계별 Fig. 8에서 레벨 3의 말단 노드들의 가중치로 부여한다. 위에서 예로든 가중치 부여 결과는 아래와 같다.
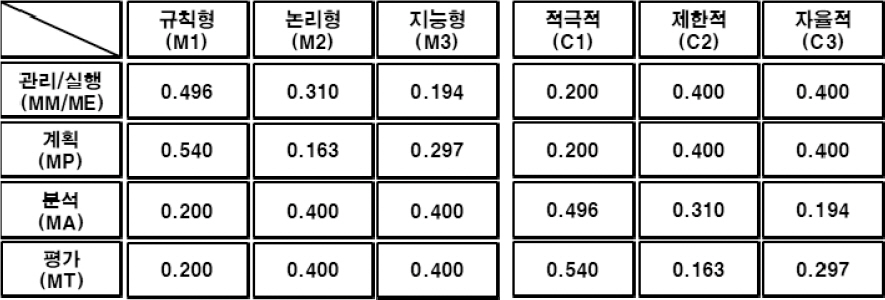
지능화 정도 가중치 w m = { 관리/실행: (M ME1:0.496, M ME2:0.310, M ME3:0.194), 계획: (M MP1:0.540, M MP2:0.163, M MP3:0.297), 분석: (M MA1:0.200, M MA2:0.400, M MA3:0.400), 평가: (M MT1:0.200, M MT2:0.400, M MT3:0.400)} 이며 개입정도 가중치 w c = { 관리/실행: (C ME1:0.200, C ME2:0.400, C ME3:0.400), 계획: (C MP1:0.200, C MP2:0.400, C MP3:0.400), 분석: (C MA1:0.496, C MA2:0.310, C MA3:0.194), 평가: (C MT1:0.540, C MT2:0.163, C MT3:0.297)} 으로 단계별 가중치가 결정되며 L i 값은 결정된 가중치를 적용하여 (wm × Mj) + (wc × Ck)으로 계산하고 식 (1)에 따라 정규화하여 계산하면 실행 단계 A 기술(L1), B 기술(L7)은 11.5점, 계획 단계 C 기술(L3), D 기술(L1)은 11.5점 분석 단계 E 기술(L1), F 기술(L7)은 11.5점, 평가 단계 G 기술(L7), H 기술(L4)은 16.25점으로 총합 50.75점이 최종 자율화 수준 점수가 된다.
이는 지능화 정도 및 개입정도 지표를 단계별로 가중치를 부여함으로써 좀 더 정확한 자율화 수준 측정이 가능하며 로봇의 임무에 따라 지능화 정도 및 개입정도에 대한 상대 중요도 변경이 가능하여 임무 타입별 자율화 수준 측정이 가능하다.
적응형 임무통제 시스템
정의한 자율화 수준 지표를 활용하여 운용자 부하에 따라 자율화 수준 조절이 가능한 적응형 임무통제 시스템을 위해서는 감독 및 제어 관점에서의 자율화 수준이 적용된 주요 기능이 구현되어야 한다. 본 논문에서는 계획단계의 임무계획 기술, 실행 단계의 임무할당 기술, 평가 단계의 운용자 인터페이스 기술에 대해 자율화 수준을 적용한다.
4.1 지능화 기술 구현 수준
분석 및 계획단계 구성기술인 임무계획 기술은 상위 제대로부터 수신된 임무를 분석하여 로봇이 임무수행이 가능하도록 작업 지시서를 생성하는 기술이다. 이를 위해 로봇의 실행 가능한 작업 단위로서 과업을 정의하여 임무를 과업의 조합으로 구성하고 과업 수행에 요구되는 능력을 서비스로 정의하여 과업과 로봇 간 관계를 표현하는 과업기반 임무 표현 모델을 정의하였으며 Table 3과 같이 임무 수행을 위한 과업 구성 및 로봇 할당 부분에 지능화 정도를 차별화하여 구현하였다. 또한 개입정도는 운용자가 임무통제 분석, 계획 및 실행 단계로의 진행 절차에 개입하는 정도에 따라 승인, 암묵적 승인(일정 시간 후 자동 승인), 자동 승인으로 구분하여 적용하였다.
Table 3.
Mission planning
실행단계 구성기술인 임무할당 기술은 기 계획된 임무계획 수행 간 발생한 우발상황에 대한 대응 기술로 과업 수행 시 로봇에게 요구되는 능력인 서비스와 과업 수행 주체인 로봇의 상태를 고려하여 우발상황에 따라 기존 과업을 수행하는 로봇들을 재조합하는 기술이다. 예를 들어 기존 임무계획의 우회이동 과업 수행 간 예측 경로와 실제 경로상 차이가 발생한 경우가 있을 수 있다. 예측 경로 상 도하 서비스가 필요하여 기동 서비스가 가능한 로봇과 도하 서비스가 가능한 로봇의 조합으로 할당하였으나 실제 경로에는 도하 서비스가 불필요하여 기동 서비스만으로 로봇을 할당하여 도하로 인한 지연시간을 줄여 효과적인 과업 수행을 가능케 한다. 이처럼 우발상황 발생 시 기존 과업을 수행하는 로봇들을 재조합하여 대응하는 기술은 Table 4와 같이 서비스와 로봇 간 관계를 이용하여 재조합하는 방법에 지능화 정도를 차별화하여 구현하였다. 또한 개입정도는 운용자가 임무통제 실행단계에서, 평가단계로의 진행 절차에 개입하는 정도에 따라 승인, 암묵적 승인(일정 시간 후 자동 승인), 자동 승인으로 구분하여 적용하였다.
Table 4.
Mission allocation
마지막 운용자 인터페이스 기술은 운용자 및 로봇의 특성을 고려하여 임무통제 시스템의 화면 구성을 동적으로 변화하게 하는 기술로 Table 5와 같이 화면 구성하는 방법에 지능화 정도를 차별화하여 구현하였다. 또한 개입정도는 화면 구성 설정 시 개입하는 정도에 따라 승인, 암묵적 승인(일정 시간 후 자동 승인), 자동 승인으로 구분하여 적용하였다.
Table 5.
Operator interface
본 논문에서는 자율화 수준이 적용된 지능화 기술의 상세한 설명은 생략한다. 단, 주요 구성기술에 적용된 지능화 기술의 신뢰성이 운용자의 업무 부하에도 영향을 주기 때문에 어느 정도 신뢰성 있는 자율화 수준 적용이 필요하다. 왜냐하면 무인로봇 임무통제를 위한 운용자와 임무통제 시스템 간 상호작용 시 지능화 기술이 적용된 시스템의 신뢰성과 운용자 신뢰성이 서로 상당한 영향을 주기 때문이다. 하지만 본 논문에서는 일정 수준의 성능을 보이는 지능화 기술을 적용하여 시스템 신뢰성과 운용자 신뢰성을 독립적 관계로 가정한다. 이를 통해 시스템 신뢰성을 배제한 운용자 신뢰성 측면에서의 분석이 가능하며 이는 운용자 신뢰성과 관련이 있는 운용자 업무부하 변화와 다중로봇 통합운용 간 관계 및 임무통제 시스템의 자율화 수준과의 관계를 확인하는 것이다.
4.2 구현 결과
본 논문에서는 다중로봇 통합운용 시 운용자의 업무부하 변화에 대응하여 임무통제 시스템의 자율화 수준 조절이 가능한 적응형 임무통제 아키텍처를 제안한다. 실험을 위한 임무통제 시스템은 다중로봇 및 전장환경 시뮬레이션 환경을 고려하였으나 실제 로봇 플랫폼 및 전장환경 특성도 반영하였다.
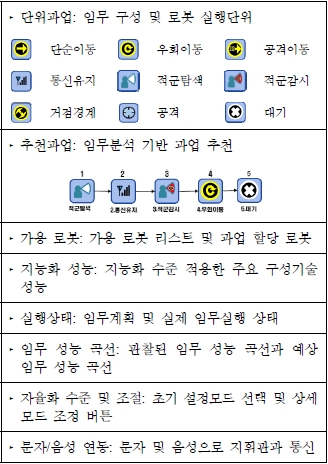
로봇의 임무통제는 상위 제대로부터 KVMF 기반 전문 형태의 임무 수신을 시작으로 앞서 설명한 임무통제 단계인 분석, 계획, 실행, 평가 단계에 해당하는 모든 기능이 복합적으로 실행되어야 한다. 다만 본 논문에서 정의한 자율화 수준의 적용은 주요 구성기술인 임무계획 기술, 임무할당 기술, 운용자 인터페이스 기술에만 적용하였으며 그 외 기능은 기존 기능을 활용한다. Fig. 9는 임무통제 시스템 화면 구성이며 자율화 수준이 적용된 주요 부분(표시) 위주로 Table 6과 같이 설명한다. 그리고 운용자 인터페이스 기술은 임무통제 시스템의 세부 화면 구성 시 운용자 및 로봇 기반 적응형 인터페이스 제공이 가능하도록 플로팅 윈도우 형태로 도시한다.

자율화 수준 변경을 통해 다중로봇 통합운용 시 동적으로 변화하는 운용자의 업무부하 변화에 대응하는 적응형 임무통제 시스템의 효용성을 확인하기 위해서는 상위 제대 모의기, 로봇 모의기, 가상환경 모의기로 구성되는 시뮬레이션 모의 환경을 사용한다. 실험 시나리오는 집결지 이동 임무이며 시뮬레이션 모의 환경은 적군 위치 식별 여부, 적군 화기 사거리 대비 아군 위치, 회피를 위한 기동로 가용 여부, 적군 대비 아군의 기동성 우수 여부, 아군 및 적군 규모 비교, 회피 시 과업필수 종료시간 만족 여부, 회피 기동로 안전 여부, 아군 화기 사거리 대비 적군 위치, 적군 기동성능과 같은 범주형(3개 범주) 상황정보와 출발지/도착지 위치를 무작위로 구성하여 제공한다. 그리고 운용자의 업무부하 변화를 위해 Fig. 9의 문자/음성 연동창을 활용하여 지휘관의 지시를 수행하게 한다. 실험 참가자는 다양한 연령대와 군사경험 및 비디오 게임 경험이 있는 대상자로 선택한다. 또한 운용자 업무부하와 다중로봇 통합운용 간 관계 및 임무통제 시스템의 자율화 수준과의 관계를 확인하기에 앞서 적용된 지능화 기술의 성능 확인을 통해 시스템 신뢰성을 배제한 운용자 신뢰성 측면의 업무부하 변화와 다중로봇 통합운용 간 관계 확인한다. 지능화 기술의 성능평가는 정의한 지능화 수준별로 구현한 규칙형, 논리형, 지능형 지능화 구현 기능에 따라 측정하며 임무계획 처리시간, 임무할당 성공률, 운용자 인터페이스 조작량을 측정한다.
결 론
본 논문에서는 운용자의 업무부하를 고려한 임무통제시스템의 자율화 수준 조절이 가능한 적응형 임무통제 시스템을 위한 아키텍처를 설명하였다. 다중로봇 통합운용에 있어 자율화 기술의 적용은 필수적이다. 하지만 로봇 임무통제의 특성상 운용자 신뢰성을 고려하지 않은 시스템 신뢰성 측면에서 고도화된 자율화 기술 적용만으로는 그 효과가 크지 않기 때문에 제안하는 적응형 임무통제 아키텍처의 활용 가능성은 크다고 할 수 있다. 제안하는 아키텍처는 운용자 업무부하 변화가 임무 수행에 끼치는 영향을 이해하고 자율화 기술 수준의 변화를 통해 운용자 업무부하 변화에 대응하도록 하는 특징이 있다. 제안 방법의 활용 가능성 확인을 위해 시뮬레이션 환경에서 다중로봇 통합운용 시나리오인 집결지 이동 시나리오에서의 실험방법 및 임무통제 시스템 구현 결과를 제시하였다.




