



서 론
수중에서 표적으로부터 수신되는 음파를 탐지를 위해 소나(SONAR)가 이용되며, 소나는 탐지하고자 하는 음파의 특성에 따라 다양한 형태와 주파수 대역으로 운용된다. 수평 선배열(HLA : Horizontal Line Array) 소나는 다른 소나에 비해 상대적으로 낮은 주파수 대역을 수신하며, 낮은 주파수 대역에서는 음파의 전달손실이 작으므로 표적의 원거리 탐지에 유리하다. 다른 형태의 배열 소나와 구별되는 수평 선배열 소나의 대표적인 특성으로는 빔 패턴의 방위 모호성을 언급할 수 있다. 빔 형성 결과로 얻어지는 수평 선배열 소나의 빔 패턴은 수평적으로 방위각만 고려하면 좌우 방위 모호성이 존재하고, 수직각까지 고려하면 원뿔 형태의 방위 모호성이 존재한다[1].
해양에서 음파는 굴절과 반사를 통해 다중경로로 전파되며, 경계면에 의해 반사될 때 큰 손실이 발생하므로 반사 횟수가 적은 다중경로의 음파가 원거리까지 전달되기에 유리하다. 일반적으로 천해에서는 표적의 거리에 비해 해저 수심이 얕기 때문에 원거리 표적으로부터 다중경로를 거쳐 수신되는 신호의 수직 성분이 작다. 심해에서 직접 경로와 해수면 반사 경로 신호는 천해와 같은 이유로 수직 성분이 작지만, 해저면 반사 경로의 신호는 상대적으로 큰 수직 성분이 포함되고 원뿔 형태의 방위 모호성으로 인해 탐지된 표적 방위에 오차가 포함될 수 있다[2]. 심해에서 수평 선배열 소나를 운용하며 수신되는 다중경로 신호에 대한 연구는 원거리 탐지를 목적으로 비교적 최근에 수행되기 시작했으며 크게 두 분류로 나눌 수 있다. 먼저 첫 번째 분류는 선배열 소나에서 탐지되는 다중경로 신호의 특성 또는 방위 오차에 대한 연구[2-4]이다. 수평 선배열 소나의 원뿔 형태 방위 모호성을 확인하고 모델링과 해상 실험을 수행하여 수신 신호의 수직각과 해양환경에 따른 방위 오차를 분석하는 연구가 수행되었다. 두 번째 분류로는 다중경로를 이용한 표적 위치 추정 연구[5-9]이다. 이 분류의 연구에서는 시간에 따른 방위 측정치의 조합인 트랙 정보를 이용하며, 직접 경로와 해저면 반사 경로의 트랙 정보로 표적의 위치를 추정하였다. 하지만 동일 표적의 다중경로 트랙이 이미 식별되었다는 가정을 전제로 수행되었으며, 트랙의 전달 경로와 동일 표적 여부를 판단하는 방법은 연구되지 않았다.
소나에서 시간에 따라 탐지되는 측정치는 자료 연관(Data Association)을 통해 트랙으로 추적되며[10], 트랙 간 연관(TTA : Track-to-Track Association)을 통해 관리된다[11]. 일반적으로 트랙 간 연관은 하나의 표적을 단일 또는 다종 센서로 탐지하여 발생한 중복 트랙을 제거하기 위한 목적으로 연구되었지만[11-14], 본 연구에서는 단일 표적으로부터 다중경로로 수신되어 추적되는 트랙을 식별하고 활용하기 위한 목적으로 트랙 간 연관을 수행하였다. 이를 위해 2장에서는 수평 선배열 소나를 이용한 해상 실험을 분석하여 표적으로부터 다중경로를 통해 측정되는 원추각 방위 특성을 정리한다. 3장에서는 2장의 결과를 기반으로 다중경로 트랙의 연관 조건을 정리한다. 또한 모의된 다중경로 트랙에 연관 조건을 적용하여 직접 경로와 해저면 반사 경로 트랙의 연관 성능을 분석하고, 다중경로 트랙 간 연관의 가능성을 확인한다. 마지막으로 4장에서 결론을 제시한다.
다중경로의 원추각 방위 특성 분석
수평 선배열 소나는 다른 소나에 비해 상대적으로 낮은 주파수 대역의 음파를 수신하여 원거리 표적 신호를 탐지하기에 유리하지만, 배열 형태의 특성상 추정되는 방위에 원뿔 형태의 모호성이 발생하는 것으로 알려져 있다. Fig. 1은 표적 신호의 상대 방위(φ)와 수직각(μ)에 따라 선배열 소나에서 측정되는 원추각 방위(θ)를 나타낸 그림이며 다음은 이를 정리한 식이다.
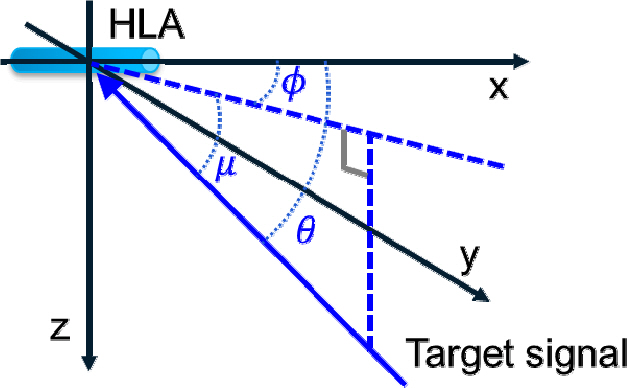
여기에서 상대 방위는 수평 선배열 소나의 예인 방향(heading)으로부터 표적 신호가 수신되는 수평 방향으로의 방위를 의미하며 수직각은 수직 방향으로의 고각을 의미한다. 동일 표적으로부터 다중경로로 전달되어 수평 선배열 소나에 수신된 원추각 방위들은 상대 방위가 같지만 수직각이 다른 특징을 가진다. 일반적으로 직접 경로나 해수면 반사 경로의 신호는 수직 성분이 작아 원뿔 형태의 방위 모호성이 좌우 방위 모호성으로 단순해진다. 좌우 방위 모호성은 표적 방위와 허위 표적 방위를 구분하는 문제이며, 수평 선배열 소나의 변침을 통해 허위 표적 방위를 구분하는 것이 가능하다[15]. 심해의 해저면 반사 경로 신호는 큰 수직 성분으로 인해 원뿔 형태의 방위 모호성이 존재하며, 이로 인해 표적 방위에 오차가 발생할 수 있다. 수평 선배열 소나에서 측정된 원추각 방위만으로 동일 표적의 다중경로로 수신된 원추각 방위를 구분하는 것은 어려운 문제이지만, 다중경로의 원추각 방위 특성을 통해 유추하는 것이 가능하다. 본 장에서는 해상 실험 결과를 분석하여 직접 경로와 해저면 반사 경로로 수신되는 원추각 방위 특성을 정리하였다.
2.1 실험 개요 및 측정치
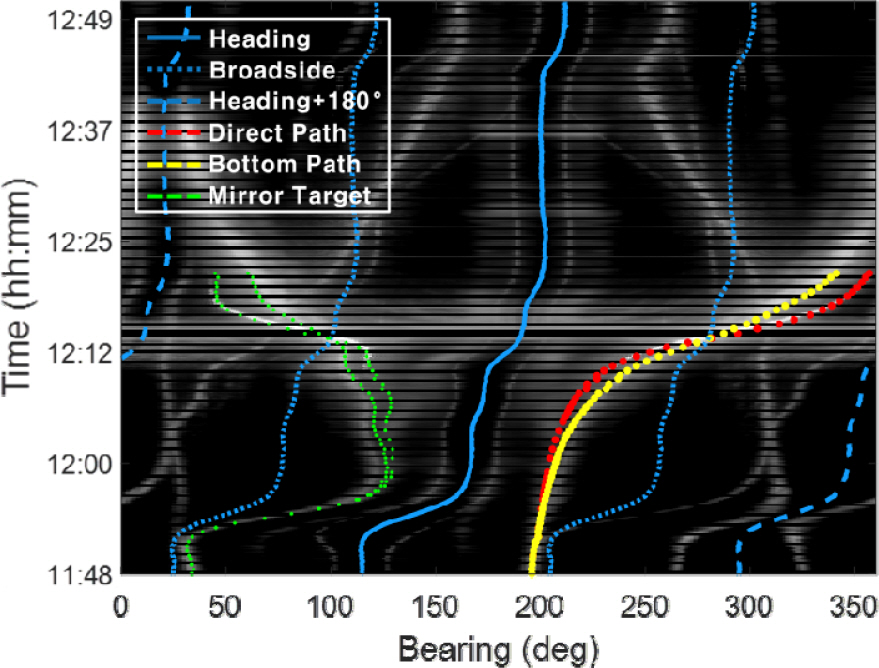
해상 실험은 해저 수심 약 1,300 m인 포항 동방의 외해에서 2022년 5월에 수행되었으며, 예인 선배열 소나를 약 48 m 수심으로 운용하여 주변 선박의 신호를 수신하였다. 실험이 수행될 동안 다른 목적의 실험을 위해 주기적으로 신호를 송신하였지만 본 연구에서는 신호 송신 구간을 제외한 시간에 대해 수신된 광대역 소음을 분석하였다. 주변 선박으로부터 예인 선배열 소나에 수신된 신호의 방위를 추정하기 위하여 DAS (Delay-And-Sum) 빔형성 기법을 사용하였으며 약 한 시간 동안 측정된 방위의 BTR(Bearing Time Record) 그래프는 Fig. 2과 같다.
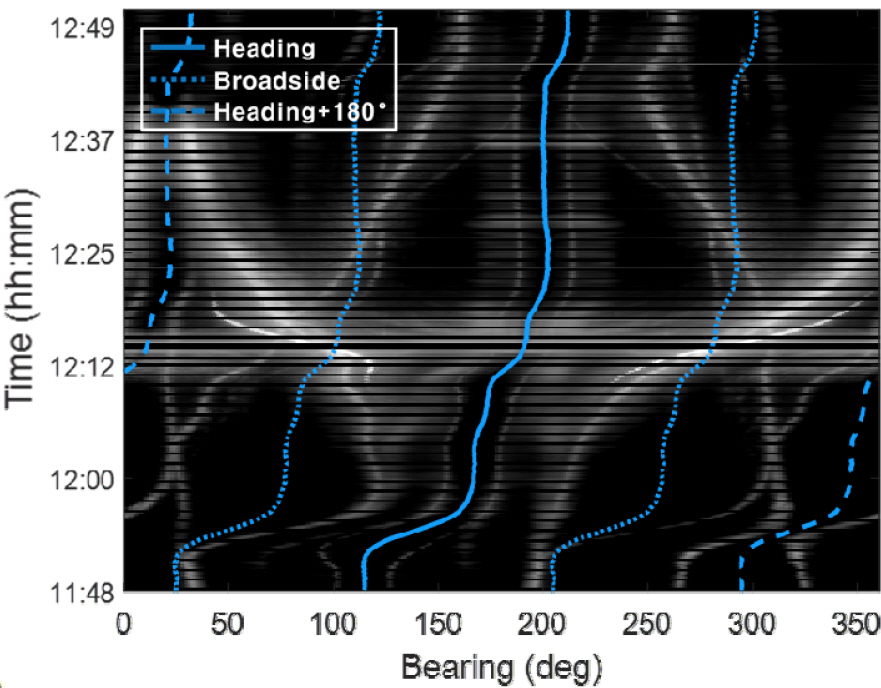
측정된 BTR 그래프에서 x축은 절대 방위로 표현되며 시간에 따라 여러 방위에서 신호가 탐지됨을 확인 가능하다. 여기에서 절대 방위는 측정된 원추각 방위에서 수평 선배열 소나의 예인 방향을 보정하여 진북을 기준으로 한 방위를 의미한다. 측정된 원추각 방위는 좌우 방위 모호성이 발생하는 수평 선배열 소나의 특징으로 인해 예인 방향을 의미하는 파란색 실선을 기준으로 좌우가 대칭된다. 추가로 해석의 편의를 위하여 수평 선배열 소나의 상대 방위 90°, 270°를 의미하는 broadside를 파란색 점선으로 표현하였으며, 파란색 파선은 상대 방위 180°를 의미한다.
2.2 측정 방위각 모의
본 연구에서는 해상 실험을 통해 다중경로로 측정된 원추각 방위의 특징을 도출하는 것이 목적이지만, Fig. 2에서 볼 수 있듯이 시간에 따라 측정된 방위만으로 동일한 표적으로부터 다중경로로 수신된 원추각 방위를 구분하는 것은 불가능하다. 따라서 수평 선배열 소나와 주변 선박의 위치에서 해양환경을 반영하여 원추각 방위를 모의하였으며, 이를 통해 수평 선배열 소나에 수신된 원추각 방위의 전달 경로를 식별하였다.
시간에 따른 원추각 방위는 주변 선박으로부터 예인 선배열 소나로 수신된 신호의 상대 방위와 수직각을 계산하여 모의 가능하다. 상대 방위 계산을 위한 예인선과 주변 선박의 위치는 예인선의 GPS와 RADAR로 측정된 정보를 사용하였다(Fig. 3). 이때, 예인 선배열 소나는 일정한 거리 간격을 두고 예인선과 동일한 경로로 이동하였다고 가정하였다. 선박 신호의 수직각 계산을 위해서는 음파전달모델인 Bellhop[16]을 사용하여 음선 추적을 수행하였다. 음선 추적을 위해 GMRT[17] 해저 지형 정보를 이용하였고 수직 음속 구조는 실험 해역에서 XBT로 측정된 자료를 이용하였다(Fig. 3).
Fig. 3.
Sound speed profile measured by XBT(left) and trajectories of the ownship and the targets(right)
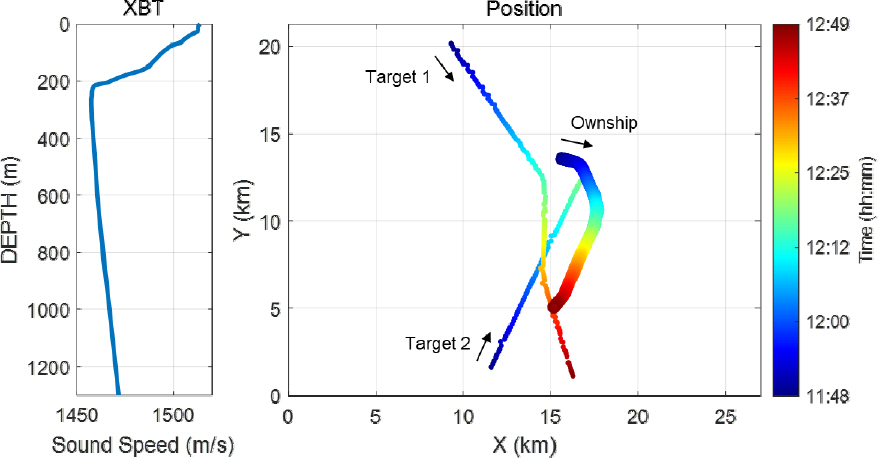
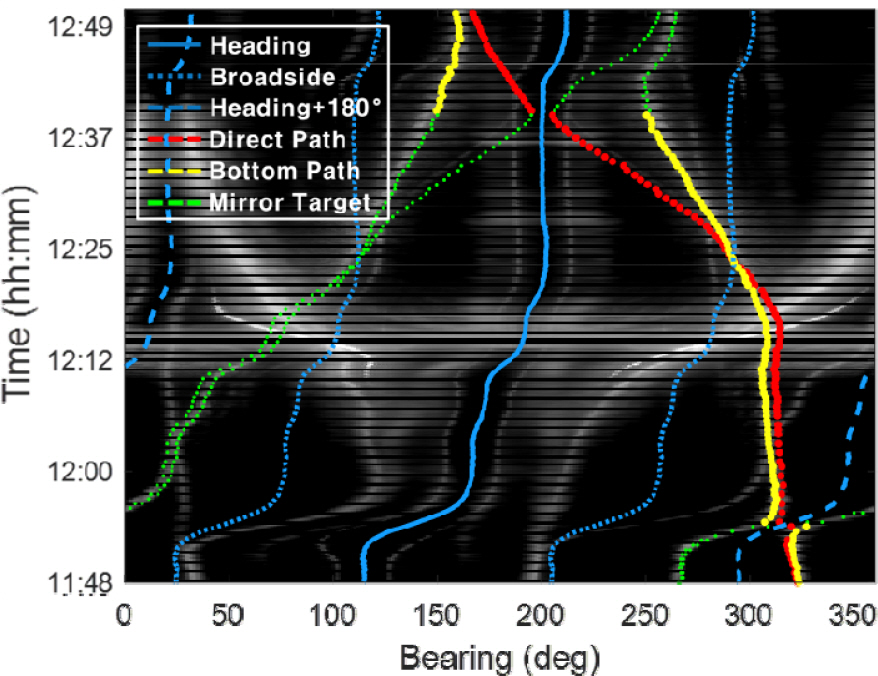
분석된 시간 동안 예인선의 RADAR에 탐지된 주변 선박은 총 세 개가 존재하였으며, 그중 직접 경로와 해저면 반사 경로의 신호가 함께 수신된 두 개 선박을 표적 1과 표적 2로 식별하였다. 두 개의 표적에 대해 원추각 방위를 모의한 결과는 Fig. 4와 Fig. 5와 같다. 각 표적에서 직접 경로(direct path)로 모의된 원추각 방위는 빨간색 선으로 나타내었고 해저면 반사 경로(bottom path)로 모의된 원추각 방위는 노란색 선으로 표현되었으며, 녹색 선은 좌우 방위 모호성에 따른 허위 표적(mirror target) 방위이다. 두 표적의 직접 경로 원추각 방위는 작은 수직각으로 인해 상대 방위와 유사하였지만, 해저면 반사 경로 원추각 방위에는 수직각에 의한 오차가 포함되었다. 표적 1은 예인선으로부터 약 2∼8 km의 거리를 두고 이동하였으며, 이때 음선 추적으로 도출된 수직각은 약 10∼60°로 계산되었다. 표적 2는 예인선으로부터 약 2∼12 km의 거리로 이동하였으며, 수직각은 표적 1과 유사하게 약 10∼60°로 계산되었다. 두 표적 모두 예인선과의 거리가 가장 가까운 위치에서 가장 큰 수직각이 계산되었다. 측정된 BTR 그래프와 모의 결과의 비교를 통해 해상 실험 당시의 음파 전달 환경을 잘 모의하고 있음을 확인할 수 있으며, 모의 결과에 따라 측정된 방위각의 전달 경로를 구분할 수 있다.
2.3 원추각 방위 특성 분석
해상 실험을 모의하여 각 표적으로부터 다중경로로 측정된 원추각 방위를 구분했으며, 각 표적에서 음파의 전달 경로별로 측정된 원추각 방위를 분석하여 직접 경로와 해저면 반사 경로의 원추각 방위 특성을 정리한다. 원추각 방위는 표적의 상대 방위와 다중경로에 따른 수직각으로 이루어지기 때문에 원추각 방위의 특성도 상대 방위 기준으로 정리된다. broadside 는 수평 선배열 소나의 상대 방위 90°, 270°를 의미하고, endfire는 수평 선배열 소나의 상대 방위 0°, 180°를 의미한다. 본 연구에서는 수평 선배열 소나의 예인 방향을 상대 방위 0°로 정하였으며, 수직각은 해수면에 수평한 방향이 0°이다. 또한 방위 특성을 분석한 결과의 단순화를 위해 이번 절에서 언급되는 상대 방위는 endfire로부터의 예각에 해당하는 방위를 의미한다. 정리된 네 가지 원추각 방위 특성은 다음과 같다.
Fig. 4와 Fig. 5에서 표적 1과 표적 2로부터 다중경로로 수신된 원추각 방위는 각각 12시 25분, 12시 14분에 상대 방위 90°에서 교차된다. 이 특성은 식 (1)을 통해서도 확인할 수 있다. 상대 방위가 90°일 경우에는 코사인값이 0이 되며 수직각이 어떤 값이든지 원추각의 코사인값도 0이 된다. 즉, 수평 선배열 소나의 broadside에서는 원추각의 모호성으로 인해 발생하는 방위 오차가 0이 되며 같은 표적으로부터 다중경로로 수신된 원추각 방위는 항상 교차한다.
여기에서 cosθi는 cosφi ×cosμi를 의미한다. 표적 1과 표적 2의 원추각 방위를 모의한 결과에서 모든 시간에 대해 해저면 반사 경로의 원추각 방위가 직접 경로의 원추각 방위보다 broadside에 가깝게 위치함을 확인할 수 있다. 식 (1)에서 다중경로의 수직각은 0°에서 멀어질수록 코사인값이 작아지므로 원추각의 코사인값이 작아진다. 즉, 같은 표적으로부터 수신되어 동일한 상대 방위를 가지는 다중경로의 원추각 방위는 수직각의 절대값이 클수록 broadside에 가깝게 측정된다.
이 특성은 첫 번째 특성으로부터 도출되었으며, 여기에서 방위 오차는 표적의 상대 방위와 원추각 방위의 차이를 의미한다. 첫 번째 특성에서 표적의 상대 방위가 broadside에 위치할 때 다중경로로 수신된 원추각 방위의 방위 오차는 0이 되지만 반대로 endfire 에 가까워질수록 원추각 방위의 방위 오차는 커진다. 표적 1에서 12시 24분에서 36분 사이의 시간을 보면 broadside에서는 직접 경로와 해저면 반사 경로의 원추각 방위가 동일하지만, endfire에 가까워짐에 따라 직접 경로와 해저면 반사 경로의 원추각 방위 차이가 더 커지는 것을 알 수 있다. 해당 모의에서는 시간에 따라 해저면 반사 경로의 수직각이 커지는 영향도 포함되어 있지만 수직각이 동일한 경우에도 상대 방위가 endfire에 가까워질 때 방위 오차가 증가한다. 식 (1)에서 수직각이 동일하더라도 상대 방위가 0° 또는 180°에 가까워지면 코사인값이 1에 가까워져 원추각에 미치는 수직각의 영향이 커지므로 방위 오차가 커지게 된다. 이때 방위 오차는 endfire에서 최댓값을 나타내며 수직각과 같은 값을 가진다.
이 특성은 두 번째 특성으로부터 도출되었다. 표적 1의 12시 38분에 해저면 반사 경로로 수신된 원추각 방위를 보면 상대 방위 0°에 해당하는 파란색 선과 교차하지 않고 우현에서 좌현으로 원추각 방위가 변경되는 것을 확인 가능하다. 이것은 원추각의 모호성으로 인한 방위 오차가 포함되어 endfire와 교차할 수 없음을 의미하고 식 (1)을 통해서도 확인할 수 있다. 식 (1)에서 수직각이 0°가 아닐 때에는 코사인값이 1보다 작은 값을 가지며, 상대 방위의 코사인값이 1이더라도 원추각의 코사인값은 1이 될 수 없다. 따라서 수직각이 포함된 다중경로 방위는 수평 선배열 소나의 endfire에 교차할 수 없음을 알 수 있다.
다중경로 트랙 간 연관 시뮬레이션
수평 선배열 소나에 수신되는 다중경로 중 직접 경로와 해저면 반사 경로로 측정된 원추각 방위를 통해 표적의 위치를 추정하는 많은 연구가 진행되었다. 하지만 수평 선배열 소나로 측정된 원추각 방위에서 동일한 표적의 직접 경로와 해저면 반사 경로 원추각 방위를 식별했다는 가정을 전제하여 수행된 연구이며, 이 가정을 만족하기 위한 연구는 수행되지 않았다. 따라서 수평 선배열 소나로 측정된 원추각 방위에서 동일한 표적으로부터 다중경로로 수신된 원추각 방위를 판단하는 방법이 필요하다. 이를 위해 이전 장에서 정리된 다중경로의 원추각 방위 특성을 기반으로 다중경로 트랙 간 연관 방법을 정리하고 시뮬레이션을 통해 적용 가능성을 확인하였다.
트랙은 소나로 획득된 측정치를 시간에 따라 추적하여 생성되며, 일반적으로 트랙 간 연관은 일정 시간 동안 측정치의 표준 편차를 고려한 범위 내에 다수개의 트랙이 존재하면 동일한 표적으로부터 생성된 트랙으로 판단한다[12]. 하지만 동일한 표적으로부터 다중경로로 수신된 트랙은 수직각에 따른 방위 오차가 포함되기 때문에, 측정치의 표준 편차가 작더라도 큰 방위 차이를 가지고 트랙이 존재할 수 있다. 따라서 기존의 방법은 적용 불가능하며, 다중경로의 원추각 방위 특성에 기반한 연관 방안을 제안한다.
3.1 트랙 간 연관 조건
표적 신호가 다중경로로 전달되어 수평 선배열 소나에 수신될 경우의 원추각 방위 특성을 2장에서 정리하였으며 해상 실험 결과와 수식을 통해 그 타당성을 확인하였다. 원추각 방위 특성은 수신된 표적 신호의 상대 방위와 수직각의 조합에 의해 나타나는 원추각의 특성이지만, 트랙 간 연관은 두 트랙을 비교하여 연관 여부에 대한 판단이 필요하다. 따라서 직접 경로와 해저면 반사 경로의 트랙을 비교하는 연관 조건으로 재정리하였다. 원추각 방위 특성과 마찬가지로 트랙의 연관 조건도 상대 방위를 기준으로 정리된다.
1) 동일한 표적으로부터 수신된 직접 경로와 해저면 반사 경로의 트랙은 항상 같은 사분면(quadrant) 안에 존재한다.
2) 해저면 반사 경로의 트랙은 동일한 표적으로부터 수신된 직접 경로 트랙보다 broadside에 가깝게 존재한다.
3) 동일한 표적으로부터 수신된 직접 경로와 해저면 반사 경로 트랙의 방위 차이는 수평 선배열 소나의 변침으로 달라지며, 직접 경로 트랙이 broadside 에 가까워지면 감소하고 endfire에 가까워지면 증가한다.
연관 조건 1)은 원추각 방위 특성 1)과 4)로부터 도출되었다. 수직각이 포함된 해저면 반사 경로의 원추각 방위는 오차가 발생하지만, 표적의 상대 방위와 같은 사분면 내에서 오차가 발생하므로 직접 경로와 해저면 반사 경로의 트랙은 항상 같은 사분면에 존재하게 된다. 연관 조건 2)는 원추각 방위 특성 2)와 동일하며, 연관 조건 3)은 원추각 방위 특성 3)으로부터 도출되었다. 원추각 방위 특성 3)에서는 표적의 상대 방위와 원추각 방위의 차이를 방위 오차로 정하였지만, 수평 선배열 소나의 측정치로부터 표적의 상대 방위는 알 수 없다. 따라서 연관 조건 3)에서는 비교를 위해 수직각이 작은 직접 경로 트랙과 수직각이 큰 해저면 반사 경로 트랙의 방위 차이를 방위 오차로 정하였다. 또한 원추각 방위 특성 3)은 수직각이 동일한 경우에 endfire에서의 방위 오차가 broadside에서의 방위 오차보다 크다는 의미이므로, 만약 표적의 상대 방위가 broadside에 가까워지더라도 수직각이 크게 증가한다면 방위 오차도 증가할 수 있음을 주의해야 한다. 즉, 연관 조건 3)은 변침각의 변화량이 수직각의 변화량보다 충분히 큰 경우에만 조건이 충족되며, 따라서 수직각의 변화를 최소화하기 위하여 수평 선배열 소나의 변침 시에만 적용하는 조건으로 정하였다.
3.2 트랙 간 연관 시뮬레이션
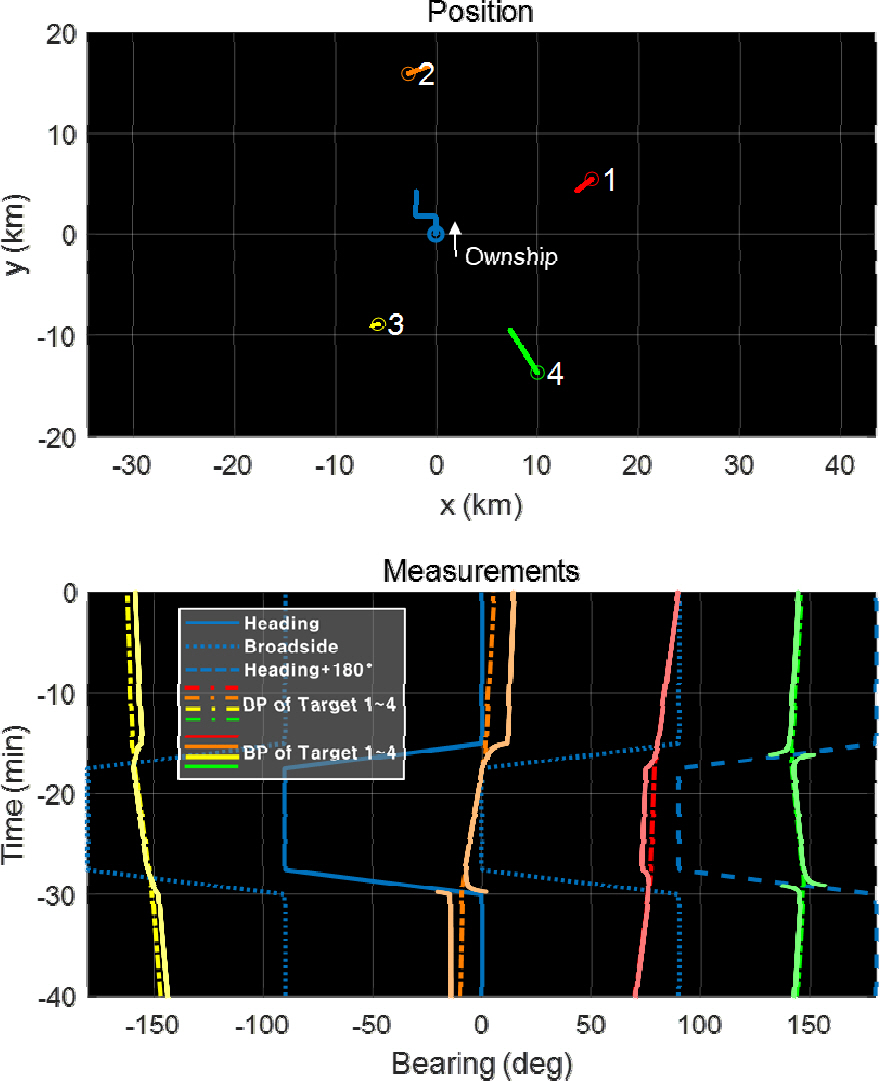
이전 절에서 정리된 연관 조건의 타당성을 확인하기 위하여 시뮬레이션을 수행하였다. 모의에 사용된 변수와 설정값은 Table 1과 같고 자함과 수평 선배열 소나의 위치는 동일하게 설정하였다. 여러 개의 트랙 중에서 동일 표적으로부터 수신된 다중경로의 트랙을 연관할 수 있는지를 판단하기 위하여 표적 개수는 최소 두 개 이상이 요구된다. 본 연구에서 표적 개수는 네 개로 설정되었으며, 총 10,000번의 모의를 반복하여 다양한 상대 위치에서의 연관 성능을 확인하였다. 표적 위치는 자함으로부터 임의의 방위와 거리로 배치되며, 표적의 침로와 속력도 임의로 설정된다. 이때 모의 시간 동안 동일한 방위로 기동하는 표적은 배제하기 위하여 모든 모의 시간에 대해 방위 차이가 1° 이하로 유지되는 중복 표적은 생성되지 않는다. 자함은 연관 조건을 충족시키기 위하여 좌우현 중 임의의 방향으로 변침이 수행되며, 성능 비교를 위해 45°로 한 번, 90°로 한 번, 90°로 두 번 변침하는 세 가지 시나리오로 모의를 수행하였다. 이때 두 번째 변침은 첫 번째 변침이 종료된 시간으로부터 10분 후 반대 방향으로 수행된다.
Table 1.
Simulation parameters used in multipath track-to-track association
각 표적에서 수평 선배열 소나로 수신되는 다중경로는 직접 경로와 해저면에 한 번 반사된 경로만을 모의하였으며, 수직 음속 구조는 등음속 구조로 가정하였다. 실제 해양에서 음파는 수직 음속 구조의 영향으로 굴절되어 수신되지만, 본 시뮬레이션에서는 표적의 상대 방위와 수직각에 따른 다중경로 트랙 간 연관 가능성을 확인하는 것이 목적이므로 음파의 전달 경로는 직선으로 단순화하였다. 또한 같은 이유로 측정치의 오차는 고려하지 않았으며, 각 트랙은 총 모의 시간 동안 방위 측정치를 정확히 추적한 결과라고 가정하였다. Fig. 6은 자함이 90°로 두 번 변침하는 시나리오에서 모의된 자함과 표적의 이동 경로와 그에 따른 BTR 그래프의 예시이다. 상단 그림의 이동 경로를 보면 자함의 침로가 0°에서 −90°로 변경된 후 다시 0°로 변경되어 총 두 번 변침하였고, 네 개의 표적은 서로 다른 방위와 거리에서 임의의 침로와 속력으로 기동함을 확인할 수 있다. 하단의 BTR 그래프에서는 각 표적의 직접 경로와 해저면 반사 경로의 원추각 방위가 broadside에 가까울 때는 유사해지고 endfire에 가까워질 때는 달라지는 것을 확인할 수 있다.
시뮬레이션 결과는 분류 문제에서 성능 평가를 위해 많이 사용되는 혼돈 행렬(Confusion Matrix)[14]로 정리하였다. 분류 문제에서 혼돈 행렬은 일반적으로 현실이 긍정(positive)과 부정(negative)일 때 알고리즘이 판단한 긍정과 부정을 조합하여 네 가지 분류에 대한 발생 빈도를 측정한다. 본 연구에서는 각 표적의 직접 경로 트랙을 해저면 반사 경로의 트랙과 비교할 경우에만 연관 관계이며, 역방향(동일 표적의 해저면 반사 경로 트랙을 직접 경로 트랙에 비교)을 포함한 이외의 경우에는 비연관 관계이다. 즉, 총 8개 트랙에서 동일한 트랙에 대한 관계를 제외한 56개 관계가 존재하며, 연관 관계는 4개이고 비연관 관계는 52개이다. 연관 관계일 때 연관 조건이 만족 되거나 비연관 관계일 때 연관 조건이 불만족 되면 연관에 성공했다고 판단하며, 연관 관계일 때 연관 조건이 불만족 되거나 비연관 관계일 때 연관 조건이 만족 되면 연관 실패라고 판단하였다. 이를 혼돈 행렬의 네 가지 분류로 정리하면, 참긍정(TP : True Positive)은 연관 관계인 4개 비교에 대해 연관이 모두 성공했을 경우를 의미하고 거짓부정(FN : False Negative)은 연관 관계인 4개의 비교 중에 한 개라도 연관에 실패했을 경우이다. 참부정(TN : True Negative)은 비연관 관계인 52개의 관계를 모두 비연관으로 판단한 경우이고, 거짓긍정(FP : False Positive)은 비연관 관계인 52개 관계 중에 한 개라도 연관으로 판단한 경우이다. 혼돈 행렬을 활용한 성능 평가를 위해 다양한 지표가 정의되어 있으며, 본 연구에서는 정확도(ACC : Accuracy)와 민감도(S : Sensitivity)를 통해 연관 성능을 확인하였다.
정확도는 연관이나 비연관 관계를 정확히 판단한 비율을 의미하며, 이 값이 클수록 연관과 비연관에 대한 판단 성공률이 크다는 의미이다. 만약 혼돈 행렬에서 4개의 연관 관계와 52개의 비연관 관계에 대해 각각의 판단 결과를 빈도수로 측정하면, 정확도 값을 신뢰할 수 없는 문제가 발생한다. 그 이유는 비연관 관계의 수가 연관 관계의 수보다 매우 커서 정확도는 비연관 관계의 판단 성능에 의해 좌우되고, 연관 관계의 판단 성능은 작게 반영되기 때문이다. 따라서 본 연구에서는 각 연관 관계와 비연관 관계를 모두 판단한 결과를 하나의 빈도로 측정하여 연관 관계와 비연관 관계의 빈도수를 같게 설정하였다.
민감도는 일반적으로 재현율(Recall)과 같은 의미로 사용되며, 실제 연관인 경우에 대한 연관 성공 비율이다. 이때, 비연관 관계에 대한 판단 성공 여부는 고려 대상이 아니다. 비연관 관계를 연관으로 판단한다면 연관 대상 후보군이 늘어나는 문제이며, 추가적인 연관 조건을 적용하거나 운용자의 개입으로 개선될 여지가 있다. 그러나 연관인 경우를 비연관으로 판단한다면 다중경로로 수신된 표적 신호를 별개의 표적으로 처리하게 되며, 이는 연관 조건의 신뢰도의 문제로 직결된다. 본 연구는 연관 조건의 적용 가능성을 확인하기 위한 목적으로 오차나 추적 성능의 영향을 반영하지 않은 이상적인 상황을 가정하였으므로 민감도는 1을 유지해야 연관 조건이 활용 가능하다고 판단하였다.
3.3 시뮬레이션 결과 분석
수평 선배열 소나에서 동일한 표적으로부터 다중경로로 수신된 트랙의 연관 성능을 분석하기 위해 자함과 표적의 상대 위치를 총 10,000번 변경하며 각 시나리오와 연관 조건에 따른 성능 지표를 계산한 결과는 Table 2와 같다. 자함의 변침에 따라 세 개의 시나리오가 설정되었으며, 각 시나리오에서 세 가지 연관 조건 각각에 대한 성능 지표를 계산하였다. 또한 추가로 연관 조건 1), 2)를 동시에 만족하는 경우와 모든 조건을 동시에 만족하는 경우에 대한 성능 지표가 분석되었다. 먼저 S는 모든 경우에 대해 1이므로 TP는 10,000이고 FN은 0이다. 즉, 모든 조건에서 동일 표적의 다중경로 트랙에 대해 연관을 성공하였고, 따라서 ACC는 비연관 관계의 판단 성능에 따라 값이 결정되었다는 의미이다.
Table 2.
Performance of multipath track-to-track association
연관 조건 1)은 동일 표적의 직접 경로 트랙을 해저면 반사 경로 트랙과 비교하여 만족한다면 반대의 순서로 비교하는 경우에도 만족하게 된다. 즉, 실제 연관 관계를 참으로 판단하면 그 반대 순서로 비교되는 비연관 관계도 참으로 판단되기 때문에 비연관 관계에 대한 연관은 항상 실패하는 것으로 계산된다. 따라서 연관 조건 1)의 TN은 항상 0이며 FP는 10,000이 되어 ACC는 0.5로 결정된다. 연관 조건 1)은 비록 비연관 관계에 대한 판단 성능은 낮더라도 연관 관계를 비연관으로 판단하지 않기 때문에 다른 연관 조건과 조합하여 ACC를 향상시킬 수 있다. 연관 조건 2)와 3)도 ACC는 0.5 정도로 낮지만, S는 1이기 때문에 두 개 이상의 연관 조건을 조합하였을 때 0.9 이상의 높은 ACC 결과를 확인할 수 있다.
연관 조건 3)은 자함의 변침이 조건에 포함되며, 연관 조건 1)과 2)도 변침을 수행하여 트랙이 위치하는 사분면을 변경시켰을 경우에 판별이 유리해진다. 첫 번째 시나리오인 자함이 45° 변침하는 경우가 세 가지 시나리오 중 가장 낮은 ACC로 계산되는데, 이유는 자함이 변침하더라도 표적 상대 방위의 사분면이 변경되지 않는 경우가 포함되기 때문이다. 따라서 두 번째 시나리오는 변침각을 90°로 수정하여 변침할 때 트랙의 사분면이 변경되도록 설정하였다. 그 결과 비연관 관계를 연관 관계로 판단하는 경우가 줄어들었음을 ACC 값으로 확인할 수 있다. 하지만 여전히 비연관 관계를 연관 관계로 판단하는 경우가 존재하였으며 그 이유는 두 표적의 사분면이 동시에 변경되는 경우가 존재하기 때문으로 분석되었다. Fig. 7에서 자함의 첫 번째 변침 시간인 −28분에 1번과 2번 표적의 상대 방위가 같아지며 두 표적의 사분면이 동시에 변경됨을 확인할 수 있다. 이로 인해 2번 표적과 1번 표적의 트랙이 연관으로 판단되어 연관에 실패하는 경우가 발생한다. 최종적으로 하단의 그림과 같이 90°로 변침을 두 번 수행하면 두 표적의 사분면이 동시에 변경되는 경우가 존재더라도 추가 변침을 통해 비연관 관계를 판단할 수 있음을 확인하였다.
Fig. 7.
Simulation example : trajectories when changing heading once (top), measurements when changing heading once (middle) and measurements when changing heading twice (bottom)

세 가지 연관 조건에서 각각의 ACC는 낮지만, 연관 조건을 조합한 경우에 높은 연관 성공률을 확인할 수 있다. 본 시뮬레이션에서는 세 가지 연관 조건의 S가 모두 1이므로 연관 조건을 모두 조합한 경우에 가장 높은 연관 성공률을 나타낸다. 하지만 연관 조건 3)은 앞서 언급하였듯이 변침각의 변화량이 표적 신호의 수직각 변화량보다 충분히 크지 않을 경우에는 연관 관계에 대해 비연관으로 판단할 가능성이 존재한다. 변침 속력은 자함에서 조절 가능하지만, 최대 변침 속력이 제한되는 한계가 있다. 즉, 자함에서 최대 변침 속력으로 변침하더라도 근거리 표적과 같은 경우에는 수직각이 크게 변할 수 있다. 따라서 연관 조건 3)을 제외하고 연관 조건 1)과 2)만 만족하는 경우의 시뮬레이션 결과도 함께 분석하였다. 연관 조건 3)을 제외하면 모든 연관 조건을 만족하는 경우보다 ACC가 조금 작지만 크게 다르지 않음을 확인하였으며, 해양환경이나 변침 속력에 따라 연관 조건 3)을 선택적으로 포함하는 것이 가능할 것으로 생각된다. 또한 본 연구에서 수행된 시뮬레이션은 편의상 직접 경로와 해저면에 한 번 반사된 경로의 트랙만을 모의하였지만, 다중경로가 추가되더라도 적용 가능하다. 정리된 연관 조건은 동일한 상대 방위에서 수직각이 다른 다중경로 트랙에 대해 모두 판단 가능하며, 이때에는 수직각이 작은 트랙에서 수직각이 큰 트랙에 대해 비교할 때 연관 관계가 성립된다.
일반적으로 수평 선배열 소나를 운용함에 있어 자함의 변침을 수행하면 좌우 방위 모호성 문제 해결과 표적기동분석(TMA : Target Motion Analysis)에 유리하지만, 수평 선배열 소나의 운용성과 정숙성 등에 불리하게 작용할 수 있다. 본 연구에서 90°로 두 번 수행된 자함의 변침 기동은 성능 분석을 위한 조건이지 연관 판단에 필수적인 기동은 아니다. 수평 선배열 소나의 운용 환경에서는 모든 방위의 트랙을 대상으로 다중경로 연관 조건을 판단하는 것이 아니므로 연관 조건을 판단하려는 대상 트랙의 사분면이 변경되는 작은 변침이나 한 번의 변침만으로도 연관 조건을 판단할 수 있을 것으로 기대된다.
요약 및 결론
해양에서 다중경로로 전달되는 표적 신호를 수평 선배열 소나로 수신할 경우에는 배열 형태의 특성으로 인해 원뿔 형태의 방위 모호성이 발생하며, 추정되는 표적 방위에 오차가 포함된다. 최근에는 다중경로로 측정된 방위 정보를 이용하여 표적의 위치를 추정하기 위한 연구가 수행되고 있지만, 수평 선배열 소나의 측정치에서 동일 표적의 다중경로 트랙을 식별하는 방법은 보고되지 않았다. 따라서 본 연구에서는 해상 실험을 통해 표적으로부터 수신되는 다중경로의 원추각 방위 특성을 식별하고 이를 기반으로 다중경로 트랙의 연관 조건을 정의하였다. 정리된 연관 조건은 측정치의 오차 범위로 수행되던 기존의 트랙 간 연관 조건과 다르게 원추각 방위 특성에 기반한 조건이다. 동일한 표적으로부터 다중경로로 측정된 원추각 방위는 상대 방위가 같지만 수직각이 다르므로 이때의 원추각 방위 특성을 통해 다중경로 트랙을 연관하는 방법을 정의하였다. 이후 수평 선배열 소나와 표적의 다양한 상대 위치에서 모의 된 다중경로 트랙을 비교하여 동일 표적의 다중경로 트랙을 연관할 수 있음을 확인하였다.
본 연구에서 수행된 시뮬레이션은 연관 조건의 타당성과 가능성을 확인하기 위해 해양에서 소나를 운용하며 발생할 수 있는 방위 오차와 추적 알고리즘에 의한 오차를 제외하고 수행되었다. 따라서 연관 조건의 적용성 확인하기 위해서는 추가로 방위 오차와 추적 성능 등을 고려한 분석이 필요하다. 이를 통해 수평 선배열 소나의 운용 환경에서 표적의 다중경로 트랙을 식별 가능하다면, 원거리 표적의 위치 추정 성능이 더욱 향상될 수 있을 것으로 기대된다.




