Alert-Confirm 탐지 방식의 설계 및 성능 분석에 관한 연구
A Study on Design and Analysis of an Alert-Confirm Detection Method
Article information
Trans Abstract
Active electronically scanning antennas are faster and more flexible in beam-scheduling than mechanical antennas. Thus, they require an advanced resource management or detection methods to operate efficiently. In a surveillance radar performing periodic detection, alert-confirm detection is an excellent method to improve the cumulative detection probability by reducing the period while maintaining the detection probability. This paper proposes a design method for alert-confirm detection based on the parameters of the conventional design. We developed a simulator based on simulink@matworks and verified the result through Monte Carlo simulation.
1. 서 론
능동 전자식 조향 안테나는 기존의 기계식안테나에 비해 빔의 조향이 빠르고 자유롭기 때문에 이를 효율적으로 이용하기 위한 자원 관리나 탐지 방식에 관한 연구들이 국내에서도 많이 진행되고 있다[1-3]. 경보-확인(Alert-Confirm) 방식의 탐지는 순차적(Sequential) 탐지 방식 중 하나로 에너지 변형 순차 탐지(Energy variant sequential detection)라고도 불린다[4]. 고전적인 Wald의 순차적 탐지는 전송된 각 빔의 입력 신호를 두 개의 임계값과 비교하여 상위 임계값을 초과하면 표적 탐지로 선언하고, 하위 임계값 아래로 떨어지면 표적이 없는 것으로 선언하며, 두 임계값 사이에 존재하는 경우, 추가 빔을 전송하는 방식을 제시하였다. 경보-확인 방식의 탐지는 이보다 조금 더 간단한 절차로 각 빔의 신호가 특정 임계값을 초과하면 확인 빔을 해당 방향으로 한 번 더 전송하여 두 번째 탐지를 수행한다. 두 번의 탐지를 모두 통과한 경우에 표적 탐지가 선언된다. 순차적 경보-확인 탐지 방식을 이용하면 균일한 탐색 빔에 의한 탐지에 비해 레이더 감도가 수 데시벨 정도 향상된다고 알려져 있다[5].
탐색 레이더의 표준 성능 지표는 탐지 영역(Coverage)이며, 단일 탐지 확률 또는 누적 탐지 확률이 특정 값 이상을 가지는 영역으로 정의된다. 특히 누적 탐지 확률은 주기적인 탐색을 수행하는 레이더에서 사용되는 성능 지표로, 접근하는 표적이 주어진 범위에 도달할 때까지 적어도 한 번 이상 탐지되는 확률로 정의되며, 단일 탐지 확률을 높이거나 탐색 속도 높여서 증가시킬 수 있다[6]. 정해진 오탐율에 대하여 단일 탐지 확률의 증가는 신호대 잡음비(SNR, Signal to Noise Ratio)의 증가에 의해 달성된다. 따라서 주어진 하드웨어에 대하여 신호대 잡음비를 증가시키기 위해서는 펄스 누적시간, 즉, 각 빔의 드웰 타임을 증가시켜야 하는데, 이렇게 되면 탐색 시간 즉, 프레임 주기가 늘어나게 되고 탐색 속도가 느려진다. 즉, 탐색 속도를 유지하면서 단일 탐지 확률을 높이거나, 속도를 높이면서 탐지 확률을 유지하는 것은 일반적으로 어렵다.
경보-확인(Alert-Confirm)은 이러한 한계를 극복할 수 있는 탐지 방식이다. 경보-확인 방식에 의해 누적 탐지 확률을 향상시키기 위한 경보 빔과 확인 빔의 신호대 잡음비(SNR), 탐지 임계값(Threshold) 및 오탐지 확률에 대한 연구들이 제시되었다[7-9], 이들은 명시적(Explicit) 형태의 식으로 표현되기 어려워 주로 몬테카를로 방식으로 이루어졌기 때문에 실제 설계로 적용하기에 다소 어려움이 있다.
본 논문에서는 단일 탐지 확률 기반의 고전적인 설계 후, 탐색 속도를 높이는 경보-확인 탐지로 변경하는 방식을 제안하였다. 또한, 매스웍스(Mathworks)사의 MBD(Model Based Design) 기반의 Simulink 시뮬레이터를 개발하여, 몬테카를로 시뮬레이션을 구현하였다. MBD 방식은 각각의 기본 기능을 블록 모델로 구현하고, 이를 그래픽한 방법으로 통합하는 방법을 취함으로써 직관적 구현을 용이하게 한다. 구현된 모델을 통해 제안한 방식이 유효함을 검증하였다.
2. 경보-확인 탐지(Alert-Confirm Detection)
레이더에서 최대 탐지 거리는 열잡음에 의한 오탐지 확률과 탐지 확률에 의해 주어지는 최소 신호대 잡음비로부터 예측된다. 또한, 탐지 확률은 표적의 레이다 반사 면적(RCS, Radar Cross Section)의 변동(fluctuation)에 따라 차이를 보이며, 산란점의 구성과 변동 시간에 따라 4개의 Swerling 모델로 구분한다. 레이다 반사 면적의 변동은 탐지 확률을 줄이며, 신호대 잡음비의 손실로 나타난다. 예를 들어 레이다 반사 면적의 변동을 고려하지 않는 경우, 오탐지 확률 10-6, 탐지 확률 0.9에 대하여 요구되는 최소 신호대 잡음비는 약 13.13 dB 정도이며, 동일 확률에 대하여 Swerling I 모델에서는 21.18 dB 정도로 7 dB 정도의 손실 보상을 요구한다.
2.1 탐색 주기(프레임 타임)
경보-확인 탐지 방식에서 탐지 확률(Pd)과 오탐지 확률(pf)은 경보 탐지와 확인 탐지에서의 확률들로 아래와 같이 표현된다.
여기서 pdA와 pdC는 각각 경보와 확인 빔의 탐지 확률이며,pfA와 pfc는 각각의 오탐지 확률이다.
고전적인 탐색 레이더에서 탐색 주기는 단일 탐지 확률에 의한 신호대 잡음비를 제공할 수 있는 빔의 드웰 시간(Td0)과 전체 탐색빔 수(Nbeam)의 곱으로 표현된다.
따라서, 오탐지 확률이나 표적의 출현에 대한 정보는 명시적으로 포함되지 않는다. 그러나 경보-확인 탐지 방식에서 탐색 주기는 이들의 영향을 받으며 다음과 같이 유도될 수 있다.
여기서, Ts1 은 탐색 주기, TsA 는 탐색, 즉 경보 탐지 시의 드웰 타임, Tdc는 확인 드웰 타임, Nt는 이전 프레임까지 탐지되지 않고 남은 표적의 수, ΔTe는 탐색과 경보 외에 추적이나 시스템 점검 등에 사용되는 추가 시간으로 이후에는 0으로 가정하였다. 또한, Ncell 는 경보 탐지 시의 전체 셀 수로 빔의 수와 드웰 내 셀의 수의 곱으로 다음과 같이 표현할 수 있다.
또, 표적의 시간당 등장률을 v라고 하면, 평균 탐색 주기를 Ts1에 대하여 각 프레임 사이에 새로이 등장한 표적의 수는 vTs1이다. 따라서 k + 1프레임에서 Nt는 다음과 같이 표현할 수 있다.
초기부터 기술해보면 다음과 같다.
여기서 Q 는 이전 프레임에 있던 표적들이 탐지되지 않고 남은 확률로, 거리가 감소하여 탐지 확률이 커지면 다음과 같이 줄어들 것이다.
만약 Q 의 변화가 크지 않아서 Q 를 상수로 가정할 수 있다면,
가 되고, 정상 상태에서의 값은 다음과 같다.
이를 식 (4)에 대입하면, 평균 탐색 주기는
로 예측할 수 있다. 그러므로 이를 식 (3)의 Ts0 보다 줄임으로써 탐색 속도를 높일 수 있다.
경보-확인 탐지 방식의 제약점은 식 (11)로부터 살펴볼 수 있다. 먼저, NdwellPfA은 오탐지에 대한 확인 시간으로 탐색 주기를 증가시키는 요인이므로 경보 탐지 시 탐지 셀의 수와 오탐지 확률은 낮은 편이 좋다. 두 번째로, 표적 등장률(v)이 탐색 주기에 영향을 주기 때문에 이에 관한 추가 분석 또는 고려가 필요하다.
2.2 단면적이 일정한 모델(Swerling 0)
2.2.1 제안 설계 방법
본 논문에서는 탐색 레이더에 대한 고전적인 방식의 설계 결과, 즉 단일 탐지 확률에 기반한 설계 파라미터로부터 경보-확인 방식으로의 전환 설계 방법을 제시한다. 이는 탐지 및 오탐지 확률을 유지하면서 탐색 주기를 줄이는 설계 방법이다. 단일 탐지 확률에 의한 설계는 최대 탐지 거리에서 오탐지 확률 10-6, 탐지 확률 0.9를 기준으로 하였다. 이때 Swerling 0 표적에 대해 요구되는 신호대 잡음비는 13.2 dB이다. 제시된 기준은 텍스트북에서 자주 제시되는 수치로[10,11], 실제 무기체계 설계에서도 사용되는 수치이다. Fig. 1은 세가지 오탐지 확률에 대한 신호대 잡음비와 탐지 확률을 나타낸 것이다.
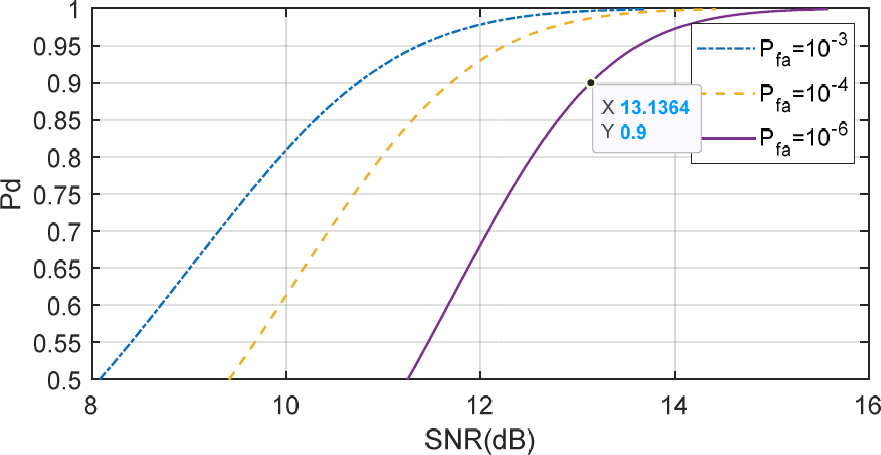
Detection probability according to SNR
먼저 단일 탐지에 의한 10-6의 오탐지 확률을 식 (2)에 의해 경보 빔과 확인 빔에서의 오탐지 확률로 나눌 수 있다. 두 빔에서의 오탐지 확률을 10-3로 올리면, 동일한 신호대 잡음비로도 0.996의 탐지 확률이 되므로 확인 빔에서 동일한 신호대 신호대 잡음비를 유지하면, 경보 빔에서의 탐지 확률은 0.904까지 줄여도 최종 탐지 확률은 유지된다. 즉, 신호대 잡음비를 10.8 dB까지 줄일 수 있다. 또한 오탐지 확률을 10-4로 올리면, 동일한 신호대 잡음비에서 0.986의 탐지 확률이 되므로 확인 빔에서 동일한 신호대 잡음비를 유지하면, 경보 빔에서 11.85 dB까지 줄일 수 있다. 앞서 밝힌 바와 같이 경보 빔에서의 오탐지 확률은 탐색 주기를 증가시키는 요인이 되므로, 낮추는 것이 좋다.
초기에 설계된 드웰 시간 Td0 에 대하여, 확인 빔의 드웰 시간을 Tdc = Td0 로 유지하면, 식 (11)의 조건은 다음과 같이 변경되므로 이를 만족하는 파라미터를 설계하면 된다.
2.2.2 설계 예와 시뮬레이션 결과
아래 Table 1과 같이 고전적인 방식의 단일 탐지 확률에 대해 설계된 경우에 대하여 식 (12)를 만족하는 경보-확인 방식으로 변경하고, 시뮬레이션을 통해 확인하였다.

Parameters in conventional design

Parameters in alert-confirm detection
탐색 영역은 고각 방향의 6개의 바(bar)와 방위각 방향의 13 빔으로 총 78개의 드웰이 탐색 주기가 되며 각 드웰이 16(ms)로 설계되어 탐색 주기는 1.248초이다. 앞 절에서 설명한 방식으로 이 결과를 기반으로 경보-확인 방식의 파라미터를 다음과 같이 설계하였다. 이 경우는 탐색 주기 뿐 아니라 탐지 확률과 오탐지 확률도 개선하였다.
Fig. 2는 전체 블록도와 몬테카를로 시뮬레이션을 위해 mathworks 사의 Simulink를 활용하여 개발된 시뮬레이터의 형상이다. 주요 블록은 빔 스케줄링 부분(보라), 신호대 잡음비에 대하여 표적의 반사 신호와 노이즈를 생성하여 수신 신호를 만드는 영역(파랑), 오탐지 확률에 의해 지정되는 임계값에 의해 탐지를 수행하는 부분(연두)와 경보 후 확인 요청 부분(주황)으로 구성되며, 그 외의 블록은 신호를 모니터링 하기 위한 보조 블록들이다. 블록도와 모델은 동일한 색상으로 표시하였으며, 블록도에서 설명된 기능을 구현한 모델을 번호로 표시하였다.
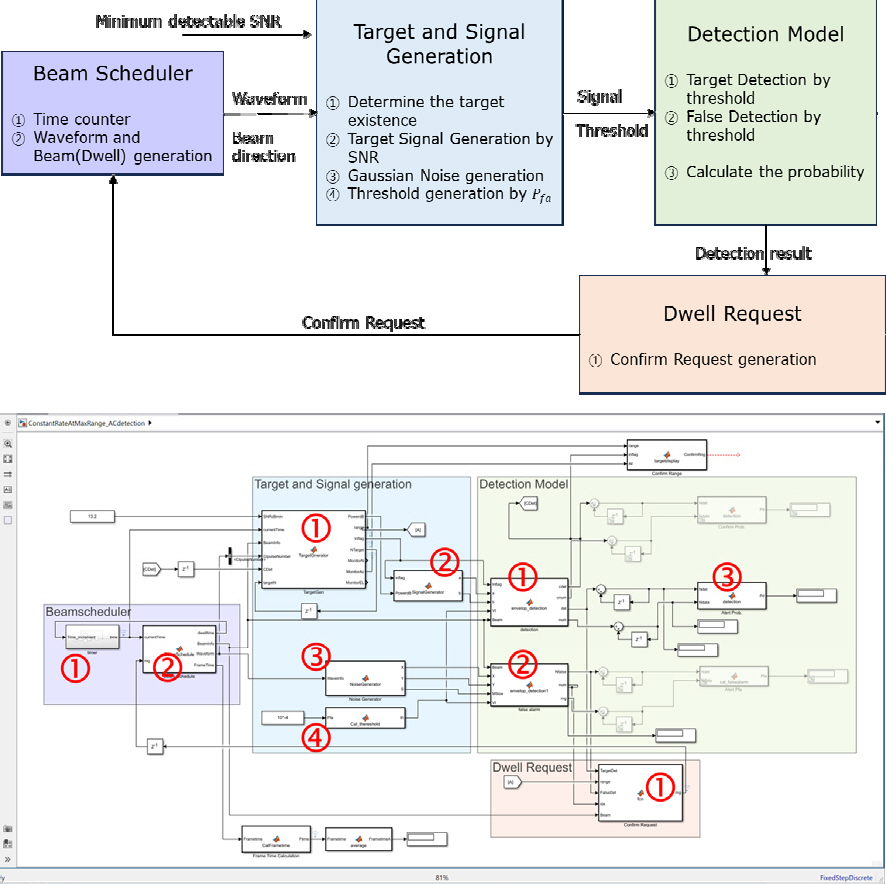
Functional blocks(up) and models of simulink (down) used in Monte carlo simulation
먼저 모델의 확인을 위해 최대 탐지 거리에서 고정된 표적에 대하여 표적의 등장률을 초당 0.1로 고정한 후, 탐색 주기의 변화와 탐색 주기를 측정하였다. 시뮬레이션에서의 예측되는 평균 탐색 주기는 약 1.08로 식 (11)에 의한 결과와 부합하였다. Fig. 3의 몬테카를로 시험 중의 탐색 주기를 보여준다. 시뮬레이션은 10000회전(780000 빔)에 대하여 수행하였다. 탐지/오탐지 확률은 이러한 시뮬레이션을 다시 10회 이상 수행하여 결과가 예측치와 일치함을 확인하였다.
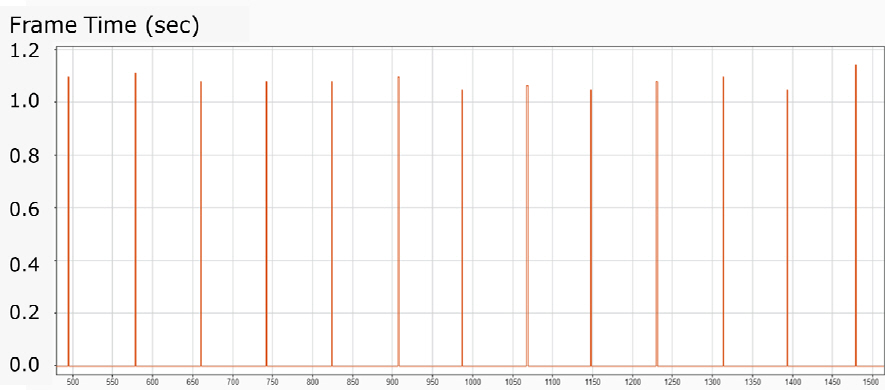
Measured frame time
다음으로 표적이 탐지 확률 50 %인 최대 탐지 거리의 1.1배 거리부터 최초 탐지가 시작될 때 기존 스캔 방식과 경보-확인 방식의 누적 탐지 확률을 비교하였다. 표적은 초당 0.1개의 속도로 전방위에서 무작위로 등장한다. 누적 탐지 확률은 최초 탐지 시작 거리와 표적의 속도에 의존적이며 아래와 같이 표현된다.
여기서, r1 은 최초 탐지 시 표적의 거리이고, rk 는 최초 탐지 후 k 번째 frame이 지난 후 표적의 거리로, rk = r1 - v(k - 1)Tf0와 같이 표현될 수 있다. 경보-확인 방식의 누적 탐지 확률은 명시적 수식으로 계산되기 어려우므로, 몬테카를로 방식으로 측정하였다.
Fig. 4는 누적 탐지 확률을 나타낸 것으로 가로축은 단일 탐지 기준 최대 탐지 거리에 의해 정규화하여 표현하였다. 기존 방식과 경보-확인 방식에 대하여도 몬테카를로 방식의 시뮬레이션을 수행하였으며, 식 (13)에 의한 계산 결과와 비교하여 확인하였다. 표적 속도는 마하 1.5, 등장률은 초당 0.1이며 이에 따른 평균 탐색 주기는 1.081로 측정되어 식 (12)와 일치에 부합한다. 식 (13)에서의 초기 탐지 거리는 최대 탐지 거리의 1.09배로 표적 등장 위치가 빔의 위치와 동일하지 않으므로 생기는 차이로 보인다. 90 %의 누적 탐지 확률을 기준으로 할 때 탐지 거리는 1 % 이상 향상되며, 1.07 정도의 동일 거리에서 탐지 확률은 5 % 이상 향상되는 것을 알 수 있다.
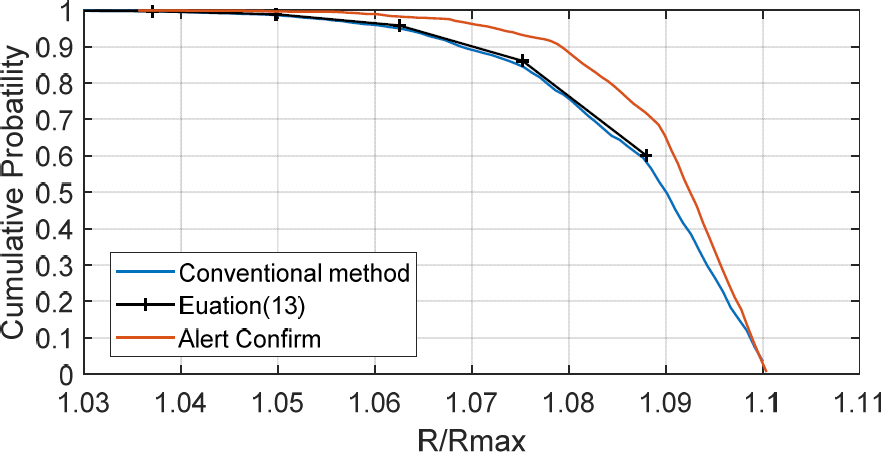
Cumulative detection probability
탐색 주기는 표적의 등장률과 관계가 있으며, 식 (11) 에 의해 평균 주기는 Fig. 5와 같이 나타났다. 초당 2개씩 등장하더라도, 붉은색으로 표시된 기존 방식에 비해 탐색 주기가 줄어드는 것을 확인할 수 있다.
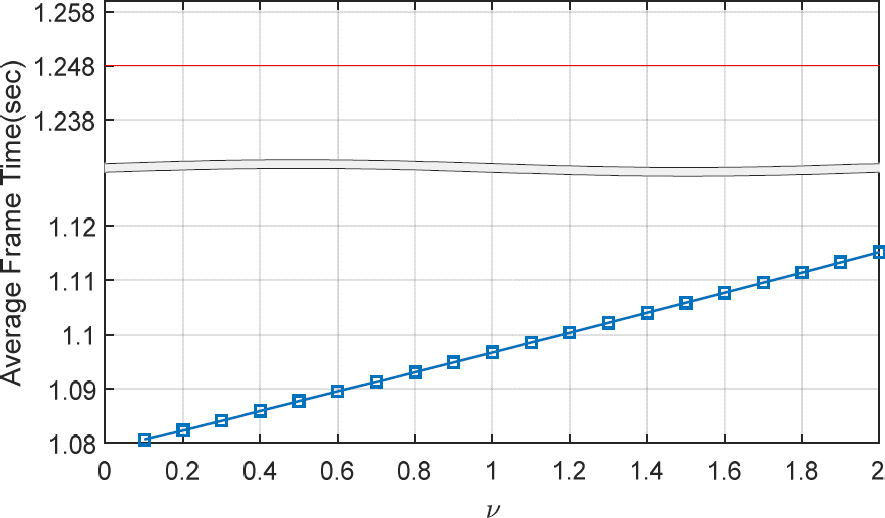
Target appearance rate and frame time
2.3 단면적이 변하는 모델의 예(Swerling I)
앞 절에서는 레이다 반사 면적의 변동이 없는 기본모델에 대한 설계를 제시하였으며 본 절에서는 반사 면적의 유동이 있는 4가지 모델 중 Swerling모델 I에 대한 설계 결과를 제시하였다. Swerling 모델 1은 탐지 간에 레이더 반사 면적이 변하는 모델로, 탐색 레이다 설계 시 가장 많이 고려되어진다. 앞서 언급한 바와 같이 반사 면적의 유동은 신호대 잡음비의 손실로 나타나며, 다른 모델에 대해서도 동일한 기법을 적용할 수 있다. Swerling 0 모델 때와 동일하게 최대 탐지 거리에서 오탐지 확률 10-6, 탐지 확률 0.9로 기준으로 하면 요구되는 신호대 잡음비는 20.2 dB까지 증가한다. 이때 추가되는 신호대 잡음비는 시스템 설계에 반영되었다고 가정하여 탐지 파라미터에 관하여는 Table 1과 동일하다고 가정하였다.
경보 드웰을 Swerling 0 모델과 동일하게 13(ms)로 줄이고, 이를 기준으로 경보-확인에 대한 오탐율을 2×10-4와 5×10-3로 나누고, 탐지 확률은 0.923과 0.978로 나누어 설계하였다. 이를 위해 확인 빔의 드웰 시간은 25(ms)로 증가하여야 한다. Fig. 6은 Swerling I 모델에 대하여 서로 다른 오탐지 확률에 대한 신호대 잡음비와 탐지 확률의 관계를 나타낸 것이다[12].
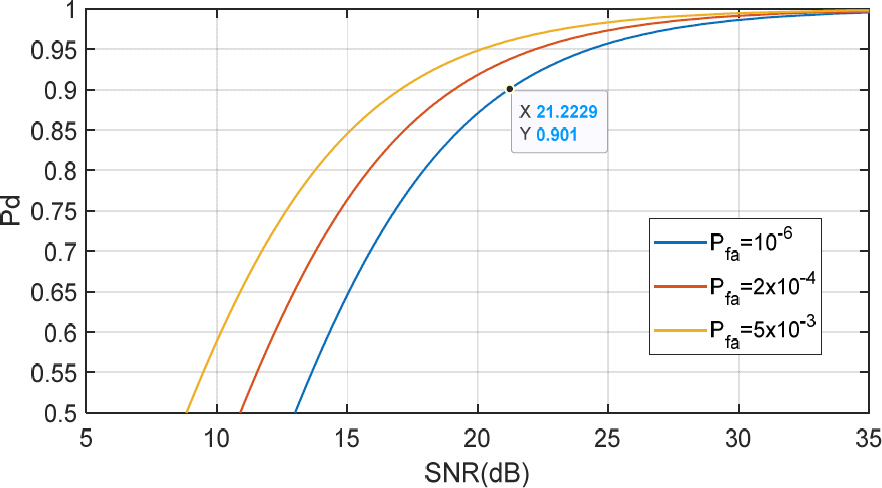
Detection probability of Swerling I model
Fig. 2의 모델에서 신호 생성 부분을 Swerling I 모델로 변경하여 동일한 시험을 수행하였다. 표적 속도는 Mach 1.5, 등장률은 초당 0.1개로 가정하였으며 평균 탐색 주기는 1.21로 측정되었다.
누적 탐지 확률은 Fig. 7과 같이 나타났으며, 90 %를 기준으로 할 때 탐지 거리는 1 % 이상 향상되고, 1.47 정도의 동일 거리에서 탐지 확률의 향상은 2.4 % 정도로 Swerling 0에 비해 조금 낮은 편이다. 이는 Swerling 0의 경우는 탐지 확률의 향상도 있었고, 탐색 주기도 더 많이 단축되었기 때문으로 생각된다.
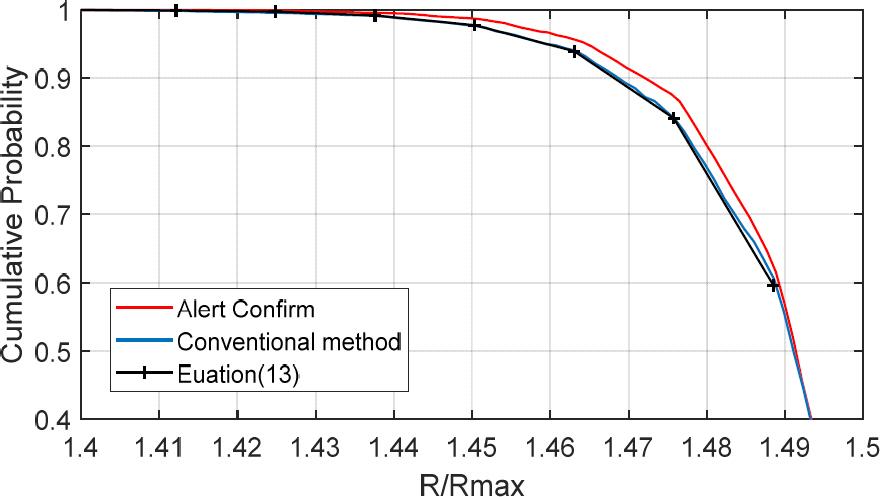
Cumulative probability of Swerling I model
3. 결 론
본 논문은 고전적인 단일 탐지기반 설계 결과를 바탕으로 경보-확인 탐지 방식으로 전환 설계하는 방법을 사례를 통해 제시하고, 몬테카를로 시뮬레이션을 통해 검증하였다. 경보-확인 탐지 방식은 기존 방식에 비해 누적 탐지 확률을 높일 수 있기 때문에 주기적인 탐지를 수행하는 탐색 레이더에서는 유리한 방식이다. 그러나 표적의 등장 주기와 표적의 속도 영향을 받기 때문에, 설계 시에 이에 대한 고려가 필수적이며 추후 다양한 시나리오와 데이터에 대한 성능 검증이 필요할 것으로 생각된다. 이와 같이 능동 전자식 조향 레이다는 소프트웨어에 의한 유연한 빔운용 등, 다양한 방식의 성능 향상이 가능하므로 이에 대한 알고리즘이 연구되어야 하며, 몬테카를로식 검증 등을 위한 플랫폼도 진화되어야 할 것이다.