



1. м„ң лЎ
мҲҳмӨ‘м—җм„ң кё°лҸҷн•ҳлҠ” н‘ңм Ғ л°Ҹ л¬ҙкё°мІҙкі„мқҳ мң„м№ҳ추м ҒмқҖ мҲҳмӨ‘л¬ҙкё°мІҙкі„ м—°кө¬к°ңл°ң кіјм • мӨ‘ мӨ‘мҡ”н•ң м„ұлҠҘнҷ•мқё н•ӯлӘ© мӨ‘ н•ҳлӮҳмқҙлӢӨ. мқҙлҘј мң„н•ҙ л§ҺмқҖ м—°кө¬к°Җ мҲҳн–үлҗҳкі мһҲмңјл©°, нҠ№нһҲ н•ҙм–‘нҷҳкІҪ к·№ліөмқ„ мң„н•ң 추м Ғм„ұлҠҘ кі лҸ„нҷ” 분야мқҳ м—°кө¬к°Җ л§Һмқҙ 진н–үлҗҳкі мһҲлӢӨ.[1вҲј3] мҲҳмӨ‘н‘ңм Ғ 추м Ғм—җ кҙҖн•ң лҢҖл¶Җ분мқҳ м—°кө¬м—җлҠ” мҲҳмӨ‘ мқҢн–Ҙ н…”л Ҳл©”нҠёлҰ¬ кё°мҲ мқҙ мӮ¬мҡ©лҗңлӢӨ. м—¬кё°м„ң мҲҳмӨ‘ мқҢн–Ҙ н…”л Ҳл©”нҠёлҰ¬ кё°мҲ мқҖ мӮ¬м „ м •мқҳлҗң мқҢн–ҘмӢ нҳёлҘј н‘ңм Ғм—җм„ң мқјм •мЈјкё°лЎң мҶЎмӢ н•ҳкі , мқҙлҘј 추м Ғ лІ”мң„лӮҙм—җ 분мӮ° л°°м№ҳлҗң мёЎм •мІҙкі„м—җм„ң нҡҚл“қ л°Ҹ 분м„қн•ҳлҠ” мһҘкё°м„ (Long Base Line) кё°л°ҳ кё°мҲ мқ„ мқҳлҜён•ңлӢӨ. мқјл°ҳм Ғмқё мһҘкё°м„ (LBL) кё°мҲ кё°л°ҳ мҲҳмӨ‘추м Ғ мІҙкі„лЎңлҠ” Fig. 1кіј к°ҷмқҙ н•ҙм Җ кі м •нҳ• мІҙкі„мҷҖ н‘ңлҘҳнҳ• мІҙкі„лЎң кө¬л¶„лҗңлӢӨ[4].

н•ҙм Җ кі м •нҳ• мІҙкі„мқҳ кІҪмҡ° мңЎм§ҖлЎңл¶Җн„° мӢңн—ҳн•ҙм—ӯк№Ңм§Җ н•ҙм ҖмјҖмқҙлё”мқ„ мқҙмҡ©н•ҳм—¬ мҲҳмӨ‘н•ҳмқҙл“ңлЎңнҸ° л°Ҹ мҲҳмӨ‘ н…”л Ҳл©”нҠёлҰ¬ л“ұмқ„ м„Өм№ҳн•ҳкі , н•ҙлӢ№ н•ҙм—ӯм—җм„ң мҲҳмӨ‘추м Ғмқ„ мҲҳн–үн•ңлӢӨ. н•ҙм Җ кі м •нҳ• мёЎм •мІҙкі„лҠ” м •нҷ•н•ҳкі м•Ҳм •м Ғмқё лҚ°мқҙн„° нҡҚл“қ нҷҳкІҪмқҙ нҷ•ліҙлҗҳлӮҳ, кі м •лҗң мӢңн—ҳн•ҙм—ӯм—җм„ң мӢңн—ҳмқ„ мҲҳн–үн•ЁмңјлЎңмҚЁ н•ҙм–‘нҷҳкІҪ л¶Ҳлҹү лҳҗлҠ” мЈјліҖ нҶөн–үм„ л°•мқҙ м§ҖлӮҳк°Ҳ кІҪмҡ° мӢңн—ҳмҲҳн–үм—җ м ңн•ңмӮ¬н•ӯмқҙ л°ңмғқн•ңлӢӨ.
н‘ңлҘҳнҳ• мёЎм •мІҙкі„мқҳ кІҪмҡ° мқҙлҸҷк°ҖлҠҘн•ң мёЎм •мІҙкі„лЎңмҚЁ кі м •лҗң н•ҙм—ӯмқ„ мӮ¬мҡ©н•ҳм§Җ м•Ҡм•„, мёЎм •мӢң мЈјліҖ нҷҳкІҪмқҳ мҳҒн–Ҙмқҙ м ҒлӢӨ. н•ҳм§Җл§Ң мёЎм •мІҙкі„к°Җ н•ҙлҘҳ л°Ҹ л°”лһҢм—җ мқҳн•ҙ мһҗмң н‘ңлҘҳн•ҳлҜҖлЎңмҚЁ, мөңм Ғмқҳ м„јм„ңл°°м№ҳ мң м§Җк°Җ м–ҙл ӨмӣҢ н‘ңм Ғ 추м Ғм„ұлҠҘмқҙ м Җн•ҳлҗңлӢӨ.
мқјл°ҳм ҒмңјлЎң н‘ңм Ғмқҳ кё°лҸҷмЎ°кұҙ(кІҪлЎң, мҶҚлҸ„, мӢңк°„ л“ұ)мқҙ мӮ¬м „ м •мқҳлҗң нҷҳкІҪм—җм„ң н‘ңлҘҳнҳ• мёЎм •мІҙкі„лҘј нҶөн•ң мҲҳмӨ‘ 추м ҒмқҖ мёЎм •мІҙкі„мқҳ мөңмҙҲ л°°м№ҳк°Җ л§Өмҡ° мӨ‘мҡ”н•ҳлӢӨ. мқҙлҠ” мёЎм •мІҙкі„мқҳ мҲҳмӢ л¶Җмқҙ(slave)к°Җ н•ҙмғҒмӢңн—ҳм„ (master)м—җм„ң м§Җм •н•ҳлҠ” мң„м№ҳлЎң мӢӨмӢңк°„ мқҙлҸҷмқҙ л¶Ҳк°Җн•ҳкё° л•Ңл¬ём—җ, мёЎм •мӢңк°„мқҙ м§ҖлӮЁм—җ л”°лқј мҲҳмӢ л¶Җмқҙмқҳ мһҗмң н‘ңлҘҳлЎң мқён•ҙ 추м Ғм„ұлҠҘмқҙ м Җн•ҳлҗҳкё° л•Ңл¬ёмқҙлӢӨ. л”°лқјм„ң ліё м—°кө¬м—җм„ңлҠ” мӮ¬м „м •мқҳлҗң мёЎм •мӢңк°„лҸҷм•Ҳ н‘ңм Ғ 추м Ғм„ұлҠҘ мң м§ҖлҘј мң„н•ң 추м ҒмІҙкі„мқҳ мөңмҙҲ л°°м№ҳм—җ лҢҖн•ҳм—¬ м—°кө¬лҘј мҲҳн–үн•ҳмҳҖлӢӨ. мқҙлҘј мң„н•ҙ мёЎм •мІҙкі„мқҳ н‘ңлҘҳлҘј мҳҲмёЎн•ҳкі мқҙлҘј л°”нғ•мңјлЎң BELLHOP мӢң뮬л Ҳмқҙм…ҳ кё°л°ҳ мёЎм •мІҙкі„ л°°м№ҳ мөңм Ғнҷ”лҘј мҲҳн–үн•ҳмҳҖлӢӨ. к·ёлҰ¬кі мөңм Ғл°°м№ҳмӢң кё°лҸҷн‘ңм Ғм—җ лҢҖн•ң 추м Ғм„ұлҠҘмқ„ мҳҲмёЎн•ҳкі мқҙлҘј м„јн„°мңЎк°Ғл°°м№ҳ л°Ҹ кІҪлЎң к·јм ‘ л°°м№ҳмӢң 추м Ғм„ұлҠҘкіј 비көҗ 분м„қн•ҳмҳҖлӢӨ.
2. мҲҳмӨ‘н‘ңм Ғ мң„м№ҳм¶”м • м•Ңкі лҰ¬мҰҳ
мҲҳмӨ‘ мқҢн–Ҙ н…”л Ҳл©”нҠёлҰ¬лҘј нҷңмҡ©н•ң мҲҳмӨ‘кё°лҸҷн‘ңм Ғмқҳ 추м Ғм—җлҠ” Fig. 2мҷҖ к°ҷмқҖ ToA(Time of Arrival) кё°лІ•мқҙ л„җлҰ¬ мӮ¬мҡ©лҗңлӢӨ[8,9]. ToA кё°лІ•мқҖ лЁјм Җ н‘ңм Ғ(мҶЎмӢ лӢЁ)кіј 3 м§Җм җ мқҙмғҒмқҳ мҲҳмӢ м җк°„ кұ°лҰ¬лҘј м¶”м •н•ңлӢӨ. к·ёлҰ¬кі к°Ғ мҲҳмӢ м җмқ„ мӣҗм җмңјлЎң н•ҳкі м¶”м •лҗң кұ°лҰ¬лҘј л°ҳм§ҖлҰ„мңјлЎң н•ҳлҠ” 3к°ңмқҳ мӣҗмқҳ көҗм җмқ„ кі„мӮ°н•ЁмңјлЎңмҚЁ н‘ңм Ғмқҳ мң„м№ҳлҘј м¶”м •н•ҳлҠ” м§ҒкҙҖм Ғмқё л°©лІ•мқҙлӢӨ. мқҙл•Ң мҡ”кө¬лҗҳлҠ” мҲҳмӨ‘кұ°лҰ¬ кі„мӮ°м—җлҠ” мӢңк°„ лҸҷкё°нҷ”лҗң мҶЎ/мҲҳмӢ кё°м—җм„ң нҡҚл“қн•ң мқҢн–ҘмӢ нҳёмқҳ мғҒнҳёмғҒкҙҖкҙҖкі„к°Җ нҷңмҡ©лҗЁмңјлЎң, м •нҷ•н•ң кұ°лҰ¬ м¶”м •мқ„ мң„н•ҙм„ңлҠ” мҶЎмӢ мӢ нҳёмқҳ м„Өкі„к°Җ мҡ”кө¬лҗңлӢӨ.

мҲҳмӨ‘кё°лҸҷн‘ңм Ғмқҳ 추м Ғмқ„ мң„н•ң мҲҳмӨ‘ н…”л Ҳл©”нҠёлҰ¬ мҶЎмӢ мӢ нҳёлҠ” лҢҖн‘ңм ҒмңјлЎң CW(Continuous Wave) лҳҗлҠ” LFM (Linear Frequency Modulation) мӢ нҳёк°Җ мӮ¬мҡ©лҗңлӢӨ. CW мӢ нҳёмқҳ кІҪмҡ° мӢ нҳё кёёмқҙк°Җ кёём–ҙм§ҲмҲҳлЎқ лҢҖм—ӯнҸӯмқҙ мӨ„м–ҙл“Өм–ҙ лҸ„н”Ңлҹ¬м—җ м·Ём•Ҫн•ҳлӮҳ, мғҒкҙҖмқҙл“қмқҙ лҶ’아진лӢӨ. LFM мӢ нҳёмқҳ кІҪмҡ° CW мӢ нҳё лҢҖ비 л„“мқҖ лҢҖм—ӯнҸӯмңјлЎң кұ°лҰ¬ 분н•ҙлҠҘ л°Ҹ лҶ’мқҖ мғҒкҙҖмқҙл“қмқ„ к°–мқ„мҲҳ мһҲмңјлӮҳ, лҸ„н”Ңлҹ¬ л°ңмғқмӢң мӢңк°„м§Җм—° м—җлҹ¬к°Җ л°ңмғқн•ңлӢӨ[10].
3. мҲҳмӨ‘ кё°лҸҷн‘ңм Ғ 추м ҒмІҙкі„ мөңм Ғл°°м№ҳ кё°лІ•
м•һм„ң 2мһҘм—җм„ңлҠ” мҲҳмӨ‘ кё°лҸҷн‘ңм Ғмқҳ мң„м№ҳм¶”м • м•Ңкі лҰ¬мҰҳм—җ лҢҖн•ҳм—¬ мҶҢк°ң н•ҳмҳҖлӢӨ. мқҙл•Ң мҲҳмӨ‘н‘ңм Ғмқҳ 추м Ғм—җлҠ” мёЎм •мӢңк°„лҸҷм•Ҳ мөңмҶҢ 3м§Җм җ мқҙмғҒмқҳ мҲҳмӢ м җм—җм„ң м–‘нҳён•ң мҶЎмӢ мӢ нҳёк°Җ м§ҖмҶҚм ҒмңјлЎң мҲҳмӢ лҗҳм–ҙм•ј н•ңлӢӨ. н•ҳм§Җл§Ң н‘ңлҘҳнҳ• мёЎм •мІҙкі„лҠ” н•ҙмғҒм—җм„ң мһҗмң н‘ңлҘҳмғҒнғңмһ„мңјлЎң н‘ңм Ғмқҳ кё°лҸҷл°©н–Ҙкіј мёЎм •мІҙкі„мқҳ н‘ңлҘҳл°©н–Ҙм—җ л”°лқј мҶЎмӢ мӢ нҳё нҡҚл“қм—җ м–ҙл ӨмӣҖмқҙ мЎҙмһ¬н•ңлӢӨ. ліё м—°кө¬м—җм„ңлҠ” н‘ңлҘҳнҳ• мёЎм •мІҙкі„мқҳ н‘ңлҘҳ л°©н–Ҙ л°Ҹ мҶҚлҸ„лҘј мҳҲмёЎн•ҳкі мқҙлҘј кё°л°ҳмңјлЎң мёЎм •мІҙкі„мқҳ мөңм Ғл°°м№ҳлҘј мҲҳн–үн•ҳмҳҖлӢӨ.
3.1 мёЎм •мІҙкі„ н‘ңлҘҳмҳҲмёЎ
3.1.1 н•ҙлҘҳ м¶”м •
л°”лӢ·л¬јмқҳ нқҗлҰ„мңјлЎң м •мқҳлҗҳлҠ” н•ҙлҘҳлҠ” н‘ңмёөн•ҙлҘҳ, мӢ¬мёөн•ҙлҘҳ, кё°нғҖн•ҙлҘҳлЎң кө¬л¶„н• мҲҳ мһҲлӢӨ. н‘ңлҘҳнҳ• мёЎм •мІҙкі„лҠ” мЈјмҡ” кө¬мЎ°л¬јмқҙ л¶Җмң мӢқ кө¬мЎ°л¬јлЎң н‘ңмёөн•ҙлҘҳмқҳ мҳҒн–Ҙмқ„ л§Һмқҙ л°ӣлҠ”лӢӨ.
н‘ңмёө н•ҙлҘҳлҠ” лҢҖл¶Җ분 м§Җнҳ•лҘҳ(geostrophic current)лЎң кө¬м„ұлҗҳм–ҙ мһҲмңјл©°, мқҙлҠ” Ekman transportм—җ мқҳн•ҙ л°ңмғқн•ң н•ҙмҲҳл©ҙ кі лҸ„м°Ё л°Ҹ мҲҳм•• кІҪлҸ„л Ҙмқҙ м§Җкө¬ мһҗм „м—җ мқҳн•ң Coriolis forceмҷҖмқҳ кҙҖкі„лЎң л°ңмғқн•ңлӢӨ. л”°лқјм„ң н•ҙмҲҳл©ҙ кі лҸ„м°ЁлҘј м•Ң кІҪмҡ° м§Җнҳ•лҘҳлҠ” м•„лһҳмҷҖ к°ҷмқҙ кі„мӮ°н• мҲҳ мһҲлӢӨ[11].
м—¬кё°м„ң u лҠ” кІҪлҸ„л°©н–Ҙ н•ҙлҘҳмҶҚлҸ„, v лҠ” мң„лҸ„л°©н–Ҙ н•ҙлҘҳмҶҚлҸ„, gлҠ” мӨ‘л Ҙк°ҖмҶҚлҸ„, w лҠ” м§Җкө¬мһҗм „к°ҒмҶҚлҸ„, П•лҠ” кі„мӮ°м§Җм җмқҳ мң„лҸ„, hлҠ” н•ҙмҲҳл©ҙ кі лҸ„м°ЁмқҙлӢӨ.
ліё м—°кө¬м—җм„ңлҠ” мң лҹҪ CMEMS(Copernicus Marine Service)м—җм„ң м ңкіөн•ҳлҠ” н•ҙмҲҳл©ҙ кі лҸ„м°Ё м •ліҙлҘј нҷңмҡ©н•ҳм—¬ лҢҖн•ңлҜјкөӯ лҸҷн•ҙм•Ҳмқҳ м§Җнҳ•лҘҳ нҒ¬кё° л°Ҹ л°©н–Ҙмқ„ Fig. 3кіј к°ҷмқҙ м¶”м •н•ҳмҳҖлӢӨ.

3.1.2 н‘ңлҘҳ лӘЁлҚё
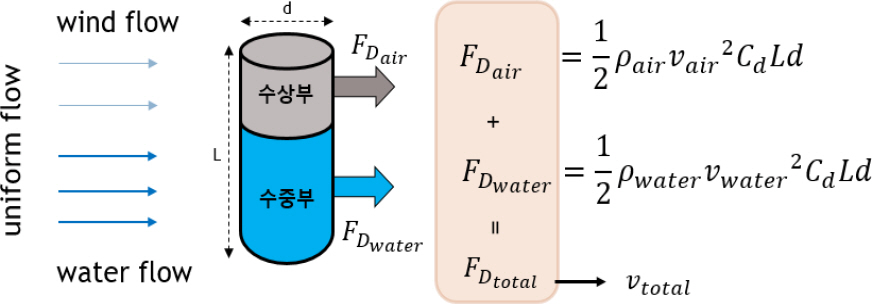
н‘ңлҘҳнҳ• мёЎм •мІҙкі„мқҳ н‘ңлҘҳ мҳҲмёЎмқ„ мң„н•ҙм„ңлҠ” н•ҙлҘҳ л°Ҹ л°”лһҢмқҙ кі л Өлҗң н‘ңлҘҳлӘЁлҚёмқҙ н•„мҡ”н•ҳлӢӨ. мқҙлҘјмң„н•ҙ ліё м—°кө¬м—җм„ңлҠ” н‘ңлҘҳнҳ• мёЎм •мІҙкі„лҘј мӣҗнҶөнҳ• к°•мІҙлЎң к°Җм •н•ҳмҳҖлӢӨ. мқҙл•Ң л¶Җмқҙмқҳ лҸҷм Ғ кұ°лҸҷ л°Ҹ нҢҢлһ‘м—җ мқҳн•ң нҡЁкіјлҠ” кі л Өн•ҳм§Җ м•Ҡм•ҳлӢӨ. к· мқјмң лҸҷ мЎ°кұҙм—җм„ң м§ҒкІҪ d, кёёмқҙ Lмқ„ к°–лҠ” мӣҗнҶөнҳ• к°•мІҙмқҳ н•ӯл ҘмқҖ лӢӨмқҢкіј к°ҷлӢӨ.
м—¬кё°м„ң ПҒлҠ” мң мІҙ л°ҖлҸ„, CdлҠ” н•ӯл Ҙкі„мҲҳ мқҙлӢӨ. н‘ңлҘҳнҳ• 추м ҒмІҙкі„лҠ” Fig. 4мҷҖ к°ҷмқҙ кіөкё°мӨ‘м—җ л…ём¶ңлҗҳлҠ” мҲҳмғҒл¶ҖмҷҖ л¬јмҶҚм—җ мһ кё°лҠ” мҲҳмӨ‘л¶ҖлЎң кө¬л¶„лҗңлӢӨ. л”°лқјм„ң мҲҳмғҒл¶Җ/мҲҳмӨ‘л¶Җм—җ л”°лҘё мң мІҙл¬јм„ұ, мң мІҙмҶҚлҸ„ л°Ҹ н•ӯл Ҙкі„мҲҳлҘј мӢқ (2)м—җ м Ғмҡ©н•ҳм—¬ кі„мӮ°н•ң к°Ғ н•ӯл Ҙмқ„ нҠ№м •л№„мңЁлЎң мЎ°н•©н•ЁмңјлЎңмҚЁ н‘ңлҘҳнҳ• 추м ҒмІҙкі„м—җ мһ‘мҡ©н•ҳлҠ” н•ӯл Ҙмқ„ м–»мқ„ мҲҳ мһҲлӢӨ. мқҙл•Ң мҲҳмғҒл¶Җ н•ӯл Ҙкі„мӮ°м—җ мӮ¬мҡ©лҗң мң мІҙмҶҚл ҘмқҖ кё°лҘҳлҚ°мқҙн„° мқҙл©°, мҲҳмӨ‘л¶Җмқҳ кІҪмҡ° 3.1.1 м Ҳм—җм„ң кі„мӮ°н•ң м§Җнҳ•лҘҳ кі„мӮ°к°’ мқҙлӢӨ. ліё м—°кө¬м—җм„ңлҠ” мҲҳмғҒл¶Җм—җ м Ғмҡ©лҗҳлҠ” кё°лҘҳ лҚ°мқҙн„°лҘј кё°мғҒмІӯ н•ҙм–‘кҙҖмёЎл¶Җмқҙмқҳ кҙҖмёЎмһҗлЈҢ лЎңл¶Җн„° нҡҚл“қн•ҳмҳҖлӢӨ.
3.1.3 н‘ңлҘҳ лӘЁлҚё кІҖмҰқ
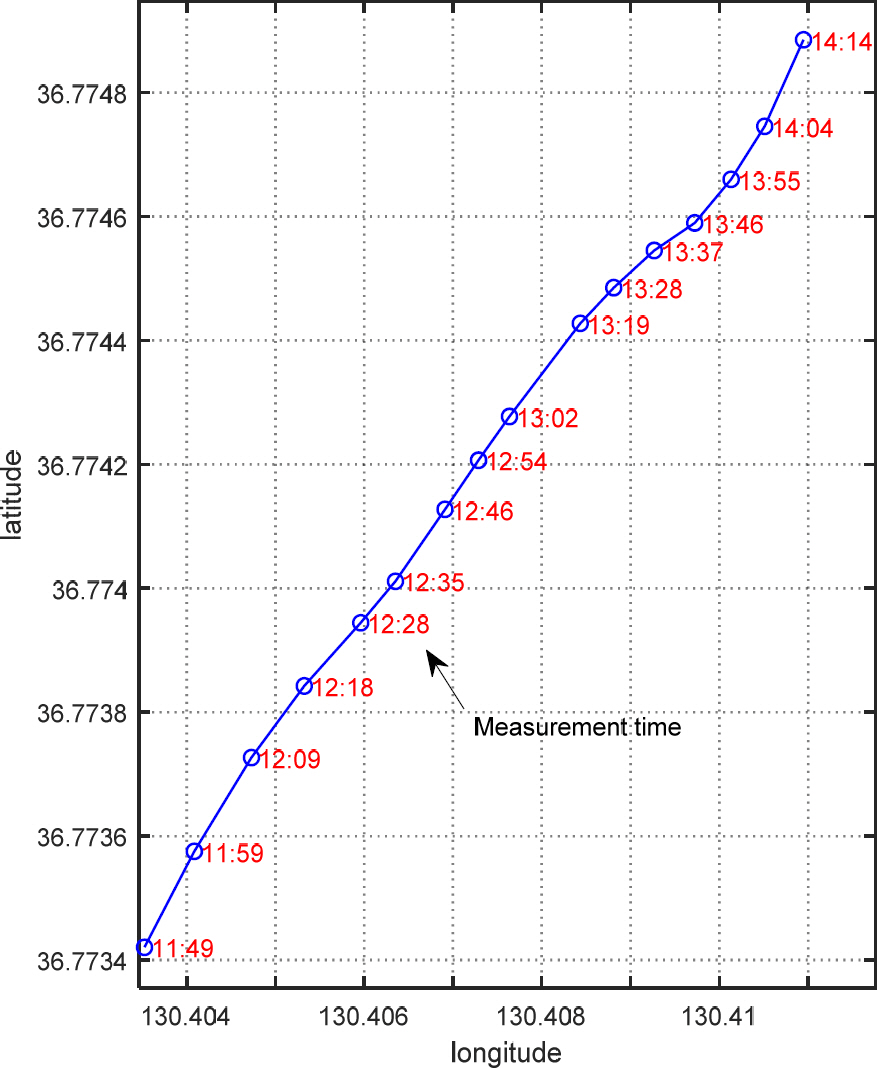
м ңм•Ҳн•ң н‘ңлҘҳ лӘЁлҚёмқҳ кІҖмҰқмқ„ мң„н•ҳм—¬ н‘ңлҘҳ лӘЁлҚёмқ„ мқҙмҡ©н•ң мӢң뮬л Ҳмқҙм…ҳ кІ°кіјмҷҖ н‘ңлҘҳмӢқ мёЎм •мІҙкі„мқҳ н‘ңлҘҳ мӢӨмёЎмһҗлЈҢлҘј 비көҗ н•ҳмҳҖлӢӨ. Fig. 5мҷҖ к°ҷмқҙ нҸ¬н•ӯ мҷён•ҙм—җм„ң мӢӨм ң н‘ңлҘҳмӢқ мёЎм •л¶Җмқҙм—җ лҢҖн•ң н‘ңлҘҳмң„м№ҳлҘј GPSлҘј нҷңмҡ©н•ҳм—¬ мёЎм •н•ң кІ°кіј, нҸүк· н‘ңлҘҳмҶҚлҸ„лҠ” м•Ҫ 0.84 л…ёнҠёлЎң мёЎм •лҗҳм—ҲлӢӨ. н•ҙлӢ№ н•ҙм—ӯмқҳ нҸүк· н’ҚмҶҚмқҖ м•Ҫ 10 л…ёнҠё мқҙл©°, мёЎм •мӢңкё°лҠ” 8мӣ”мқҙлӢӨ.
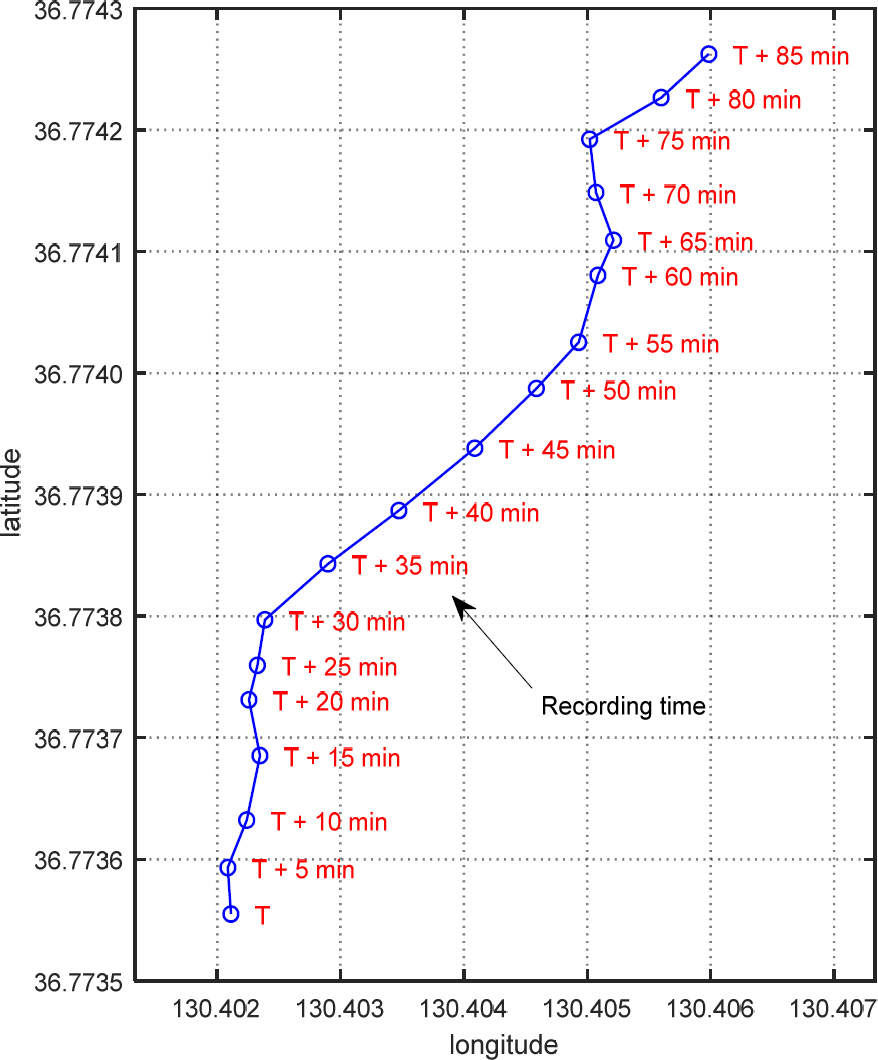
ліё м—°кө¬м—җм„ңлҠ” н•ҙм—ӯ, мӢңкё°, н’ҚмҶҚ мЎ°кұҙл“ұмқҙ мң мӮ¬н•ң мғҒнғңм—җм„ң 3.1.2м Ҳмқҳ н‘ңлҘҳлӘЁлҚёмқ„ мқҙмҡ©н•ң н‘ңлҘҳ мӢң뮬л Ҳмқҙм…ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. мӢң뮬л Ҳмқҙм…ҳ кІ°кіј Fig. 6кіј к°ҷмқҙ нҸүк· н‘ңлҘҳмҶҚлҸ„лҠ” м•Ҫ 0.71 л…ёнҠёлЎң м¶”м •лҗҳл©°, мӢӨм ң мёЎм • кІ°кіј лҢҖ비 мҳӨм°ЁлҠ” н•ҙлҘҳ л°Ҹ кё°лҘҳмқҳ мҶҚл Ҙкіј л°©н–Ҙ мҳӨм°Ём—җ мқҳн•ҙ л°ңмғқн•ҳлҠ” кІғмңјлЎң м¶”м •лҗңлӢӨ.
3.2 мөңм Ғнҷ” кё°лІ• л°Ҹ лӘ©м Ғн•ЁмҲҳ
3.2.1 мөңм Ғнҷ” кё°лІ•
ліё м—°кө¬м—җм„ңлҠ” мёЎм •мІҙкі„мқҳ мөңм Ғл°°м№ҳлҘј мң„н•ҙ simulated annealing кё°лІ•мқ„ м Ғмҡ©н•ҳмҳҖлӢӨ. simulated annealing кё°лІ•мқҖ л©”нғҖнңҙлҰ¬мҠӨнӢұ мөңм Ғнҷ” кё°лІ•мӨ‘ н•ҳлӮҳлЎң м•Ҳм •м Ғмқё м „м—ӯ мөңм Ғн•ҙлҘј м°ҫмқ„мҲҳ мһҲлӢӨ[12,13]. лҳҗн•ң кё°нғҖ л©”нғҖнңҙлҰ¬мҠӨнӢұ мөңм Ғнҷ” кё°лІ•лҢҖ비 лі‘л ¬кі„мӮ°мқҙ мҡ©мқҙн•ҳм—¬ ліё м—°кө¬мҷҖ к°ҷмқҙ лӘ©м Ғн•ЁмҲҳ кі„мӮ°м—җ л§ҺмқҖ мӢңк°„мқҙ мҶҢмҡ”лҗҳлҠ” л¬ём ңм—җ м Ғн•©н•ҳлӢӨ. simulated annealing л°©лІ•мқҖ metropolis algorithmмқ„ мөңм Ғнҷ” л¬ём ңм—җ м Ғмҡ©н•ң кІғмңјлЎң, мөңм Ғнҷ” лӘ©м Ғн•ЁмҲҳк°Җ мӢқ (3)кіј к°ҷмқҖ мҲҳмҡ©нҷ•лҘ мқ„ к°–кі мҳЁлҸ„ ліҖнҷ” мҠӨмјҖмӨ„м—җ л”°лқј к°Ғ лӢЁкі„м—җм„ң нҸүнҳ•мқ„ мқҙлЈ° л•Ңк№Ңм§Җ л°ҳліө кі„мӮ°н•ңлӢӨ. Fig. 7мқҖ Simulated annealing кё°лІ•мқҳ нқҗлҰ„лҸ„ мқҙлӢӨ.
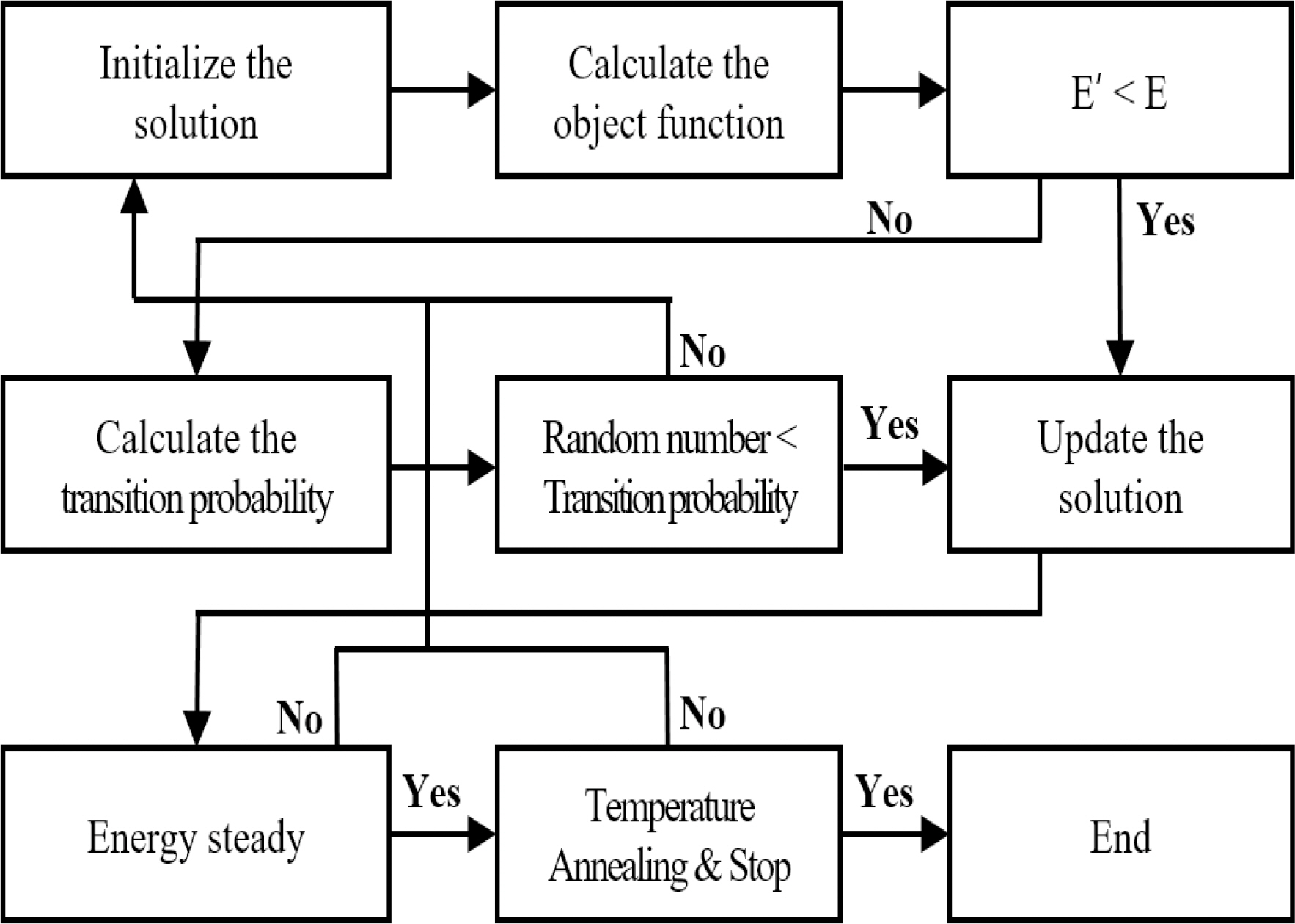
м—¬кё°м„ң Гү;мқҖ мғҲлЎңмҡҙ мғҒнғңмқҳ лӘ©м Ғн•ЁмҲҳ к°’, E нҳ„мһ¬мқҳ лӘ©м Ғн•ЁмҲҳ к°’, TлҠ” annealing мҳЁлҸ„мқҙлӢӨ.
3.2.2 лӘ©м Ғн•ЁмҲҳ
н‘ңлҘҳнҳ• мёЎм •мІҙкі„лҠ” к°Ғ мҲҳмӢ л¶Җмқҙ(slave)м—җм„ң нҡҚл“қлҗң мӢңк°„м§Җм—° м •ліҙлҘј мӢңн—ҳмҶҢ лҳҗлҠ” н•ҙмғҒмӢңн—ҳм„ (master)мңјлЎң л¬ҙм„ м „мҶЎн•ҳм—¬ мҲҳмӨ‘н‘ңм Ғмқҳ мң„м№ҳлҘј м¶”м •н•ңлӢӨ. л”°лқјм„ң н‘ңлҘҳнҳ• мёЎм •мІҙкі„мқҳ 추м Ғ м •нҷ•лҸ„лҠ” мҲҳмӨ‘ мқҢн–ҘмӢ нҳё нҡҚл“қнҷҳкІҪ лҝҗл§Ң м•„лӢҲлқј, л¬ҙм„ нҶөмӢ нҷҳкІҪмқҳ мҳҒн–Ҙмқ„ нҒ¬кІҢ л°ӣлҠ”лӢӨ. л¬ҙм„ нҶөмӢ нҷҳкІҪмқҖ masterмҷҖ slave к°„мқҳ LOS (Line of Sight) кұ°лҰ¬к°Җ к°Җк№ҢмҡёмҲҳлЎқ м–‘нҳён•ҙ진лӢӨ. мқҙлҘј кі л Өн•ҳм—¬ ліё м—°кө¬м—җм„ңлҠ” мҲҳмӢ л¶Җмқҙмқҳ мөңм Ғл°°м№ҳлҘј мң„н•ҙ к°Ғ мҲҳмӢ л¶Җмқҙк°„ мқҙкІ©кұ°лҰ¬(LOS кұ°лҰ¬)мҷҖ н•ҙлӢ№ л°°м№ҳм—җм„ң мҳҲмғҒлҗҳлҠ” 추м Ғм„ұлҠҘмқҳ мЎ°н•©мңјлЎң лӘ©м Ғн•ЁмҲҳлҘј м„Өм •н•ҳмҳҖлӢӨ.
4. мёЎм •мІҙкі„ мөңм Ғл°°м№ҳ кІ°кіј
4.1 мӢң뮬л Ҳмқҙм…ҳ лӘЁлҚё
4.1.1 мӢң뮬л Ҳмқҙм…ҳ мЎ°кұҙ
ліё м—°кө¬м—җм„ңлҠ” мһ„мқҳ кё°лҸҷн•ҳлҠ” н‘ңм Ғм—җ лҢҖн•ң мёЎм •мІҙкі„ мөңм Ғл°°м№ҳ л°Ҹ 추м ҒмҳӨм°ЁлҘј кі„мӮ°н•ҳкі , мқҙлҘј м„јн„° мңЎк°Ғл°°м№ҳ л°Ҹ кІҪлЎң к·јм ‘л°°м№ҳмӢң 추м ҒмҳӨм°ЁмҷҖ 비көҗ분м„қ н•ҳмҳҖлӢӨ. мқҙлҘј мң„н•ң мӢң뮬л Ҳмқҙм…ҳ мЎ°кұҙмқҖ 6к°ңмқҳ мёЎм •мІҙкі„лҘј мқҙмҡ©н•ҳм—¬ 10 km Г— 10 km лІ”мң„ лӮҙм—җм„ң 6 л…ёнҠёлЎң кё°лҸҷн•ҳлҠ” 2к°ңмқҳ мҲҳмӨ‘н‘ңм Ғмқ„ 30분간 추м Ғн•ҳлҸ„лЎқ м„Өм •н•ҳмҳҖлӢӨ. мқҙл•Ң мёЎм •мІҙкі„ м„Өм№ҳ мҶҢмҡ”мӢңк°„мқҖ 1к°ңлӢ№ 10분мңјлЎң к°Җм •н•ҳмҳҖкі , мёЎм •мІҙкі„ м„Өм№ҳ м§Җм җк°„ мӢңн—ҳм„ мқҙлҸҷмӢңк°„мқҖ 12 л…ёнҠёлЎң к°Җм •н•ҳмҳҖлӢӨ.
4.1.2 мҶЎмӢ мӢ нҳё лӘЁлҚёл§Ғ
м ҖмҶҚмңјлЎң кё°лҸҷн•ҳлҠ” мҲҳмӨ‘н‘ңм Ғмқҳ мң„м№ҳм¶”м •м—җлҠ” лҸ„н”Ңлҹ¬ нҡЁкіјмқҳ мҳҒн–Ҙмқҙ лҜёл№„н•ҳлӢӨ. л”°лқјм„ң ліё м—°кө¬м—җм„ңлҠ” лҸ„н”Ңлҹ¬ нҡЁкіјм—җлҠ” м·Ём•Ҫн•ҳлӮҳ лҶ’мқҖ мғҒкҙҖмқҙл“қмқ„ м–»мқ„ мҲҳ мһҲлҠ” LFM мӢ нҳёлҘј мӮ¬мҡ©н•ҳм—¬ мӢң뮬л Ҳмқҙм…ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. м„Өкі„н•ң LFM мҶЎмӢ мӢ нҳёлҠ” Fig. 8кіј к°ҷмқҙ 7,000 Hz вҲј 8,000 Hz лҢҖм—ӯнҸӯмқ„ к°–кі 100 msмқҳ кёёмқҙ нҠ№м„ұмқ„ к°–лҠ”лӢӨ.

4.1.3 мқҢнҢҢм „лӢ¬нҠ№м„ұ мЎ°кұҙ
мҲҳмӨ‘м—җм„ң мқҢнҢҢмқҳ м „лӢ¬мқҖ кі„м Ҳлі„ мҲҳмӨ‘мқҢмҶҚ분нҸ¬м—җ л”°лқј лӢ¬лқјм§„лӢӨ. л”°лқјм„ң мҲҳмӨ‘н‘ңм Ғ 추м ҒмӢң мҡ”кө¬лҗҳлҠ” мёЎм •мІҙкі„ мөңм Ғл°°м№ҳ кІ°кіјлҠ” кі„м Ҳм—җ л”°лқј лӢӨлҘҙлӢӨ. ліё м—°кө¬м—җм„ңлҠ” лҢҖн•ңлҜјкөӯ лҸҷн•ҙмҷён•ҙм—җм„ңмқҳ кі„м Ҳмқҳ л”°лҘё мёЎм •мІҙкі„ мөңм Ғл°°м№ҳлҘј мҲҳн–үн•ҳмҳҖкі , мқҙл•Ң мӮ¬мҡ©лҗң мҲҳмӨ‘мқҢнҢҢм „лӢ¬ нҠ№м„ұмқҖ Fig. 9мҷҖ к°ҷлӢӨ.

4.2 мӢң뮬л Ҳмқҙм…ҳ кІ°кіј
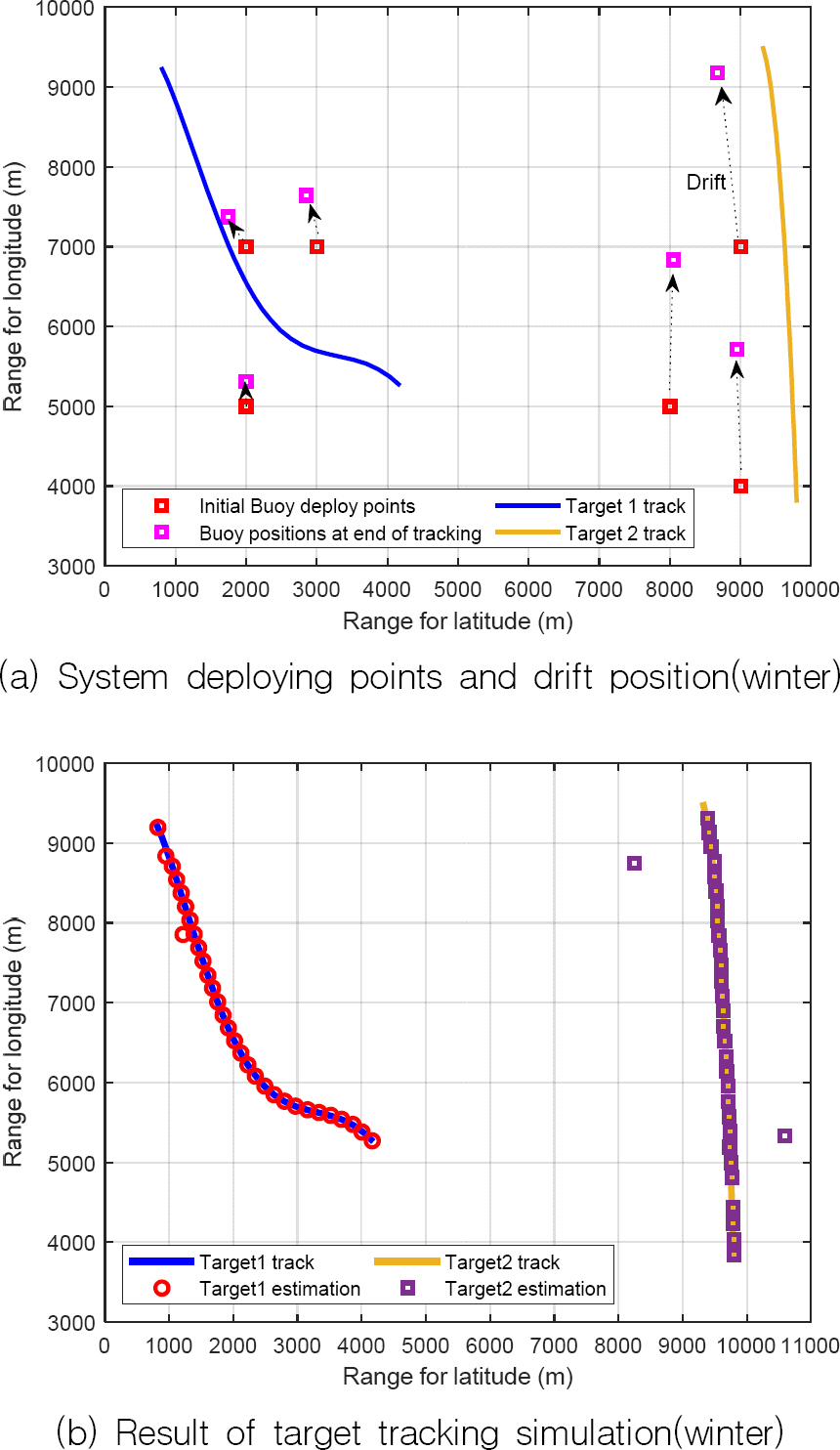
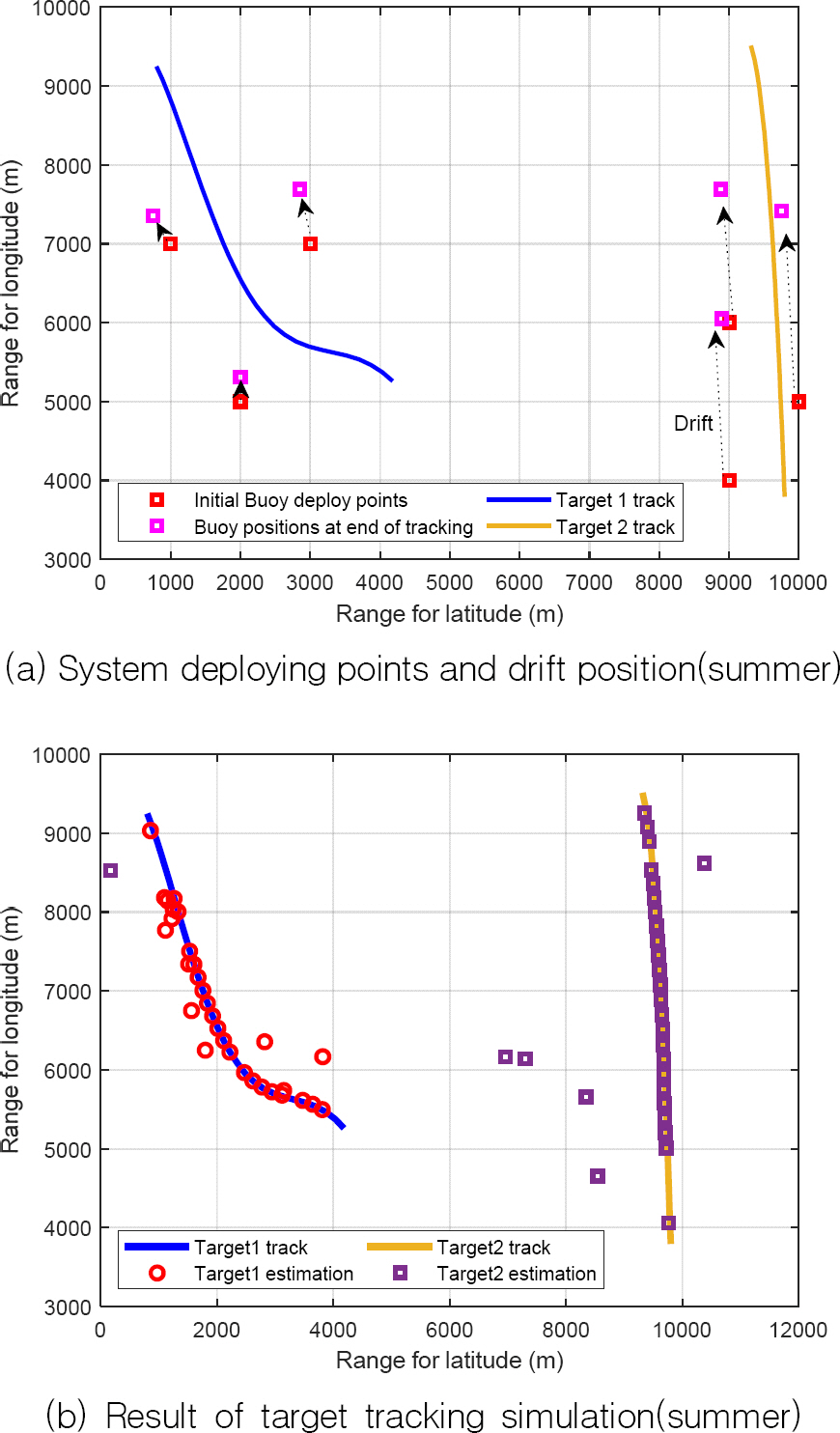
кі„м Ҳлі„ мӢң뮬л Ҳмқҙм…ҳ кІ°кіј лҸҷкі„м Ҳ мөңм Ғ л°°м№ҳмӢң мёЎм •мІҙкі„ м„Өм№ҳлҘј мң„н•ң мӢңн—ҳм„ кё°лҸҷкұ°лҰ¬лҠ” 13.36 km, мң„м№ҳ추м Ғ мҳӨм°ЁлҠ” м•Ҫ 262 mлЎң Fig. 10кіј к°ҷлӢӨ. м—¬кё°м„ң мң„м№ҳ추м Ғ мҳӨм°ЁлҠ” мӢңк°„м—җ л”°лҘё к°Ғ н‘ңм Ғ(2к°ң) мң„м№ҳм—җм„ңмқҳ мӢң뮬л Ҳмқҙм…ҳ м¶”м •к°’кіј мӢӨм ң мң„м№ҳмқҳ м°Ёмқҙм—җ лҢҖн•ң RMS к°’мқҙлӢӨ. н•ҳм Ҳкё° мөңм Ғ л°°м№ҳмӢң мӢңн—ҳм„ кё°лҸҷкұ°лҰ¬лҠ” 13.77 km, н‘ңм Ғм—җ лҢҖн•ң мң„м№ҳ추м Ғ мҳӨм°ЁлҠ” м•Ҫ 1.4 kmлЎң Fig. 11кіј к°ҷмқҙ кі„мӮ° лҗҳм—ҲлӢӨ. кі„мӮ°кІ°кіј н•ҳм Ҳкё°м—җлҠ” л¶Ҳлҹүн•ң мқҢнҢҢ м „лӢ¬нҷҳкІҪмңјлЎң мқён•ҳм—¬ мқҢнҢҢм „лӢ¬ мқҢмҳҒкө¬м—ӯмқҙ л°ңмғқн•ҙ мқјл¶Җ л¶Җмқҙм—җ мӢ нҳёк°Җ мҲҳмӢ лҗҳм§Җ м•ҠлҠ” кІғмқ„ нҷ•мқён• мҲҳ мһҲм—ҲлӢӨ. л”°лқјм„ң 2к°ңмқҳ н‘ңм Ғмқҙ кё°лҸҷн•ҳлҠ” лІ”мң„лҘј 추м Ғн•ҳкё° мң„н•ҙм„ңлҠ” 6к°ң мқҙмғҒмқҳ мёЎм •мІҙкі„к°Җ н•„мҡ”н•ң кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.
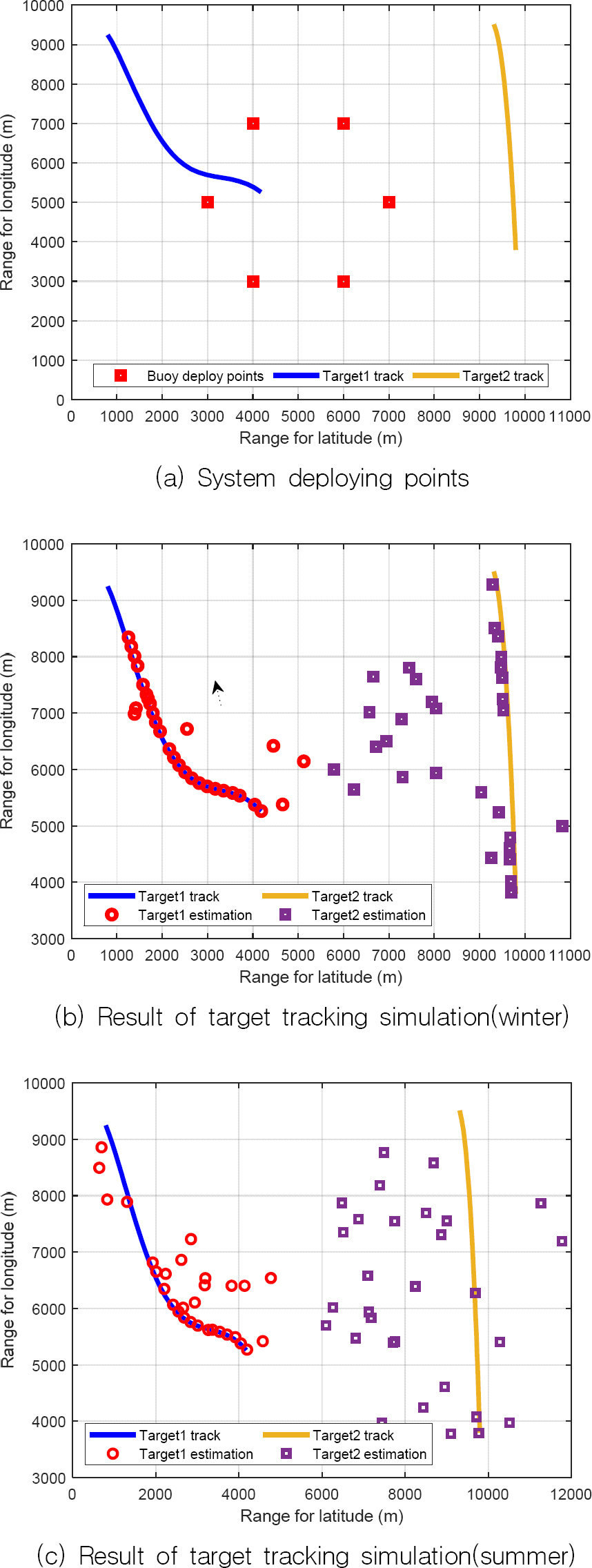
мёЎм •мІҙкі„ мөңм Ғл°°м№ҳ кІ°кіјмқҳ 추м Ғм„ұлҠҘмқ„ нҷ•мқён•ҳкё° мң„н•ҙ м„јн„° мңЎк°Ғл°°м№ҳ л°Ҹ кІҪлЎң к·јм ‘л°°м№ҳмӢң н‘ңм Ғ 추м ҒмҳӨм°ЁлҘј Fig. 12 л°Ҹ 13кіј к°ҷмқҙ кі„мӮ°н•ҳмҳҖлӢӨ. мқҙл•Ң кІҪлЎң к·јм ‘л°°м№ҳлһҖ мӮ¬м „м •мқҳлҗң н‘ңм Ғмқҳ кІҪлЎңмқёк·јм—җ мёЎм •мІҙкі„лҘј мһ„мқҳ л°°м№ҳн•ҳлҠ” л°©лІ•мңјлЎң, ToA кі„мӮ°мқ„ мң„н•ҙ к°Ғк°Ғмқҳ кІҪлЎң мқёк·ј 3м§Җм җм—җ мёЎм •мІҙкі„лҘј л°°м№ҳн•ҳмҳҖлӢӨ. л°°м№ҳк°„ н‘ңм Ғ 추м Ғ мҳӨм°ЁлҘј 비көҗн•ң кІ°кіј, Table 1кіј к°ҷмқҙ мөңм Ғл°°м№ҳкІ°кіјк°Җ н•ҳм Ҳкё° л°Ҹ лҸҷм Ҳкё° лӘЁл‘җ м ҒмқҖ мҳӨм°ЁлҘј к°–лҠ” кІғмқ„ нҷ•мқён• мҲҳ мһҲм—ҲлӢӨ. мқҙлҠ” м„јн„° мңЎк°Ғл°°м№ҳ л°Ҹ кІҪлЎң к·јм ‘л°°м№ҳмқҳ кІҪмҡ° мҲҳмӢ л¶Җмқҙ н‘ңлҘҳмҷҖ н‘ңм Ғкё°лҸҷмқ„ кі л Өн•ҳм§Җ м•ҠмқҖ л°°м№ҳмқҙкё° л•Ңл¬ём—җ нҠ№м •мӢңм җм—җм„ң мҲҳмӨ‘мң„м№ҳ м¶”м •м—җ н•„мҡ”н•ң 3м§Җм җ мқҙмғҒмқҳ мҶЎмӢ мӢ нҳё нҡҚл“қмқҙ л¶Ҳк°Җн•ҳкё° л•Ңл¬ёмқҙлӢӨ.

5. кІ° лЎ
ліё м—°кө¬м—җм„ңлҠ” мҲҳмӨ‘кё°лҸҷн‘ңм Ғмқҳ мҲҳмӨ‘추м Ғмқ„ мң„н•ҙ мёЎм •мІҙкі„мқҳ н‘ңлҘҳл°©н–Ҙмқ„ кі л Өн•ң мөңм Ғл°°м№ҳлҘј мҲҳн–үн•ҳмҳҖлӢӨ. мқҙлҘј мң„н•ҙ лҢҖн•ңлҜјкөӯ лҸҷн•ҙ м§Җм—ӯмқҳ м§Җнҳ•лҘҳлҘј кі„мӮ°н•ҳкі мқҙлҘј л°”нғ•мңјлЎң н‘ңлҘҳлӘЁлҚёмқ„ мғқм„ұн•ҳмҳҖлӢӨ. к·ёлҰ¬кі мӢӨм ң н‘ңлҘҳнҳ• л¶Җмқҙмқҳ GPS мёЎм •к°’кіј 비көҗкІҖмҰқмқ„ мҲҳн–ү н•ҳмҳҖлӢӨ. мөңм Ғл°°м№ҳлҘј мң„н•ң кё°лІ•мңјлЎңлҠ” simulated annealingмқ„ мӮ¬мҡ©н•ҳмҳҖкі , лӘ©м Ғн•ЁмҲҳлҠ” мҲҳмӢ л¶Җмқҙ м„Өм№ҳм—җ мҶҢмҡ”лҗҳлҠ” мӢңн—ҳм„ мқҳ кё°лҸҷкұ°лҰ¬мҷҖ мӢӨм ң н‘ңм Ғмң„м№ҳ л°Ҹ м¶”м •мң„м№ҳк°„мқҳ кұ°лҰ¬мҳӨм°Ёмқҳ н•©мңјлЎң м„Өм •н•ҳмҳҖлӢӨ.
н•ҙлӢ№ мӢң뮬л Ҳмқҙм…ҳ лӘЁлҚёмқ„ нҷңмҡ©н•ҳм—¬ 10 km Г— 10 km лІ”мң„м—җм„ң кё°лҸҷн•ҳлҠ” 2к°ңмқҳ н‘ңм Ғм—җ н•„мҡ”н•ң кі„м Ҳлі„ мҲҳмӢ л¶Җмқҙ мөңм Ғл°°м№ҳлҘј мҲҳн–үн•ҳкі , мқҙлҘј м„јн„° мңЎк°Ғл°°м№ҳ л°Ҹ кІҪлЎң к·јм ‘л°°м№ҳ кІ°кіјмҷҖ 비көҗн•ҳмҳҖлӢӨ. к·ё кІ°кіј мөңм Ғл°°м№ҳмӢң мң„м№ҳ추м ҒмҳӨм°Ё(RMS)лҠ” лҸҷкі„м Ҳ м•Ҫ 262 m, н•ҳкі„м Ҳ 1.4 kmлЎң м„јн„° мңЎк°Ғл°°м№ҳ л°Ҹ кІҪлЎң к·јм ‘л°°м№ҳ лҢҖ비 м–‘нҳён•ң кІ°кіјлҘј нҷ•мқён• мҲҳ мһҲм—ҲлӢӨ. л”°лқјм„ң мқҙлҹ¬н•ң мёЎм •мІҙкі„ мөңм Ғл°°м№ҳ л°©лІ•мқ„ мӢӨм ң мҲҳмӨ‘н‘ңм Ғ 추м ҒмӢңн—ҳм—җ м Ғмҡ©н• кІҪмҡ°, мёЎм •мӢңк°„лҸҷм•Ҳ 추м Ғм„ұлҠҘ м Җн•ҳлҘј мөңмҶҢнҷ” н• мҲҳ мһҲмқ„ кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.
ліё м—°кө¬м—җм„ң мҶҢк°ңн•ң 추м ҒмІҙкі„ мөңм Ғл°°м№ҳ л°©лІ•мқҖ мҲҳмӨ‘ мқҢн–Ҙ н…”л Ҳл©”нҠёлҰ¬ мӢ нҳёмқҳ лҸ„н”Ңлҹ¬ нҡЁкіјлҘј кі л Өн•ҳм§Җ м•ҠмқҖ л°©лІ•мқҙлӢӨ. л”°лқјм„ң лҸ„н”Ңлҹ¬ нҡЁкіјмқҳ мҳҒн–Ҙмқ„ мғҒлӢ№нһҲ л°ӣлҠ” кі мҶҚкё°лҸҷ н‘ңм Ғм—җ лҢҖн•ң м Ғмҡ©м—җлҠ” м ңн•ңм җмқҙ мһҲлӢӨ. л”°лқјм„ң лҸ„н”Ңлҹ¬ нҡЁкіјм—җ к°•мқён•ң мҲҳмӨ‘ мқҢн–Ҙ н…”л Ҳл©”нҠёлҰ¬ мҶЎмӢ мӢ нҳё к°ңл°ңкіј мҲҳмӢ мӢ нҳёмқҳ лҸ„н”Ңлҹ¬ нҡЁкіјлҘј ліҙм •н•ҳлҠ” мөңм Ғл°°м№ҳл°©лІ•м—җ лҢҖн•ң н–Ҙнӣ„м—°кө¬к°Җ н•„мҡ”н•ҳлӢӨ.




