강자성 표적 탐지를 위한 드론 기반 자기 이상 탐지
Drone based Magnetic Anomaly Detection to detect Ferromagnetic Target
Article information
Trans Abstract
Drone based Magnetic Anomaly Detection measure a magnetic anomaly signal from the ferromagnetic target on the ground. We conduct a magnetic anomaly detection with 9 ferromagnetic targets on the ground. By removing the magnetic field measured in the absence of ferromagnetic targets from the experimental value, the magnetic anomaly signal is clearly measured at an altitude of 100 m. We analyze the signal characteristics by the ferromagnetic target through simulation using COMSOL multiphysics. The simulation results are within the GPS error range of the experimental results.
1. 서 론
전장에서 상대 진영의 무기체계 배치와 같은 전투 준비상황을 파악하는 감시정찰은 중요한 임무이다. 이 를 위해 오래전 개발된 망원경으로부터 현대의 첨단 레이다, 라이다, 영상 장비, 열상장비, 그리고 수중 음파 탐지기까지 정찰을 위한 다양한 기술이 개발되었다[1-3]. 하지만, 정찰 기술의 발전에 따라 은폐, 엄폐, 그리고 스텔스 기술 등의 은닉 기술도 성장하였다. 예를 들어, 무기체계가 지하나 수중에 동작하지 않는 상태로 배치된 경우, 이들을 레이다, 라이다, 영상 및 열상장비 등으로 탐지하는 것은 한계가 있다. 따라서 이러한 상황에 무기체계 배치와 같은 전투 준비사항에 대한 정보를 알 수 있는 추가적인 방법에 대한 연구가 필요하다.
지구는 남극과 북극으로 이루어진 하나의 거대한 자석이며, 자석에서 발생한 자기장이 지구를 감싸고 있다. 지구 자기장 하에서 강철로 되어 있는 무기체계 등은 국소적으로 지구 자기장을 왜곡시킨다. 이러한 자기장 왜곡을 자기장 센서를 통해 검출하면 해당 지역에서의 중화기 등의 유무를 탐지할 수 있다. 이러한 자기장을 이용한 탐지 기술은 2차 세계 대전 때 잠수함을 탐지하기 위하여 해상 정찰기에 자기장 센서를 탑재하고 자기장 왜곡을 탐지하는 Magnetic Anomaly Detection(MAD) 시스템이 기원이다[4]. 지금까지도 자기 이상 탐지를 이용한 감시정찰은 주로 해상에서 항공기를 이용하여 수행하였다. CAE 社에서 개발한 MAD-XR은 3개의 양자 자기장 센서와 1개의 플럭스 게이트 자기장 센서가 탑재되어 있으며, 약 100 m 깊이에서 잠항중인 잠수함을 측정할 수 있다[5].
강자성 표적에 의한 지구 자기장 왜곡의 크기는 표적과 탐지거리 사이의 세제곱에 반비례한다. 그렇기 때문에, 육상에서의 자기 이상 탐지는 주로 지하자원 탐사를 목적으로 수행하였다[6,7]. 이를 위해 사람이 자기장 센서를 휴대하여 지표면 근처의 자기 이상 탐지를 시행하거나 헬기나 비행기와 같은 유인항공기에 센서를 장착하여 자기 이상 탐지를 실시하였다. 또한, 지난 10년간 무인항공기 기술이 비약적으로 성장함에 따라 이를 이용한 자기 이상 탐지 기술도 발전하고 있다[8]. 국내의 경우, ㈜지오룩스 社에서는 플럭스게이트 센서를 이용하여 드론 자력탐사를 실시하였다[9]. 한국지질자원연구원에서 철광산 탐사 등에 드론 자력탐사 시스템을 활용한 연구가 있으며[10], 지뢰 탐지에도 드론을 이용한 연구 사례를 찾아볼 수 있다[11].
지표 근처에서 트럭 크기의 강자성 물체를 드론에 장착된 센서로 효과적으로 탐지하기 위해서는 측정자료의 특성 및 한계 분석이 필요하며, 획득된 자료에 대한 적절한 자료처리 기법이 적용되어야 한다. 이 논문에서는 전차에서 발생한 자기 이상 신호를 드론에 장착한 자기장 센서로 탐지한 실험 결과를 소개한다. 또한, 신호처리를 통해 더욱 정확한 표적의 위치를 찾고자 하였다. 마지막으로 시뮬레이션을 통해 강자성 표적에 대한 자기 이상을 분석하였다.
2. 자기 이상 탐지 실험
전라남도 OO과 강원도 OO에서 강자성 표적 탐지를 위한 자기 이상 탐지 실험을 진행하였다. 지구 자기장 하에서 자성체가 자화하는 정도를 상대 투자율 (relative permeability)로 나타낸다. 공기, 바닷물, 천부 풍화 토양은 상대 투자율이 1과 유사한 값을 갖는다. 그러므로, 강자성 표적이 지표면에 있는 경우 측정한 자기 이상 신호는 강자성 표적이 바닷물 속 또는 지하에 위치할 때 측정한 자기 이상 신호와 차이가 없다[12,13]. 이러한 이론을 바탕으로 길이 7 m, 폭 3.5 m, 무게 5,500 kg인 압연강 재질의 전차(이하 강자성 표적)를 지면에 배치하였다. 강자성 표적은 육군으로부터 지원받았다. 각 강자성 표적의 간격은 10 m이고, 총 9 대를 배치하였다.
드론은 DJI 社의 MATRICE 300 RTK를 사용하였으며 배터리를 제외한 무게는 3.6 kg, 최대 탑재 하중은 2.7 kg, 그리고 비행시간은 35 분 내외이다. 자기장 센서는 GEOMETRICS 社의 MagArrow를 사용했다. 자기장 잡음은 5 pT/Hz1/2, 동작범위는 20 μT∼100 μT, 그리고 무게는 1 kg이다. 드론이 10 m/s의 속도로 비행을 한다고 했을 때, 매 1 cm 마다 데이터를 취합할 수 있는 샘플링 레이트를 가지고 있다. MagArrow는 세슘 기반의 원자 자기장 센서로 구성되어 있으며, 총 자기장 이상값을 기록한다. Fig. 1은 자기 이상 탐지 실험을 위해 MATRICE 300 RTK와 MagArrow가 결합한 모습이다.

Photo of MATRICE 300 RTK and MagArrow combined
강자성 표적을 탐지할 수 있는 최적의 고도를 파악하기 위하여 강자성 표적이 배치되어 있는 지역에서 다양한 고도에 대해 자기장 자료를 획득하였다.
먼저 높이 100 m로 비행하며 자기 이상 신호를 측정하였으며, 이때, 비행 궤적은 Fig. 2와 같다. x, y 축으로 각각 약 400 m 영역을 25 m 비행간격으로 설정하여 자료를 획득하였다. 격자의 중앙에 강자성 표적이 3×3으로 배치되어 있다.
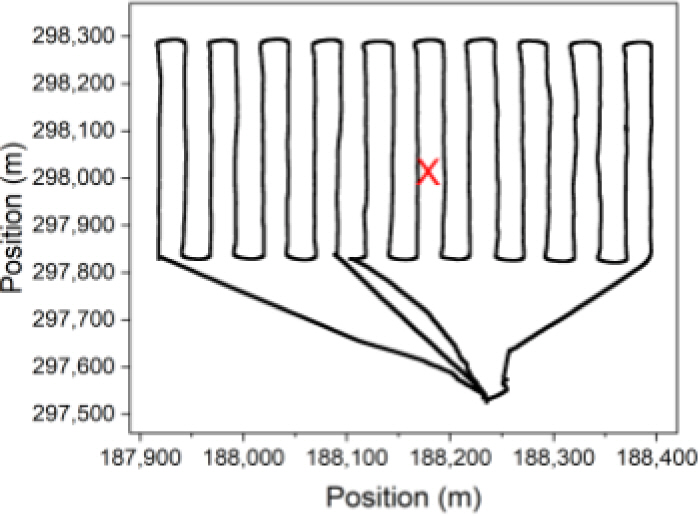
Drone flight trajectory at 100 meters
자기 이상 탐지 신호의 데이터 처리 흐름도는 Fig. 3과 같다. 일반적으로 자력이상자료를 처리하는 방식을 기반으로 자료처리를 실시하였다. 연구에 사용된 처리 방법을 순서대로 설명하면 다음과 같다. 가장 먼저 획득된 자료의 편집을 수행한다. MagArrow에서 취득한 자료는 1000 Hz이나 드론의 속도와 자료처리의 효율성을 고려하여 20 Hz로 downsampling을 하여 자료를 분석하였다. MagArrow의 경우, 비행 전 자력계가 기록을 시작해야 하므로 기체의 이륙과 착륙 시에도 자료가 계속 기록된다. 또한 설정된 비행 시작점으로 이동하면서 기록된 자료가 획득된 자료와 경로가 겹치는 경우도 발생한다. 그 외에도 비행 시 발생하는 비정상적인 드론 및 센서의 움직임과 곡선 비행을 하면서 발생하는 구간은 해석 시 잡음으로 작용한다. 따라서 초기 자료를 편집해주어야 한다. 이 연구에서는 기록되는 센서의 Heading 방향 정보를 기반으로 값의 변화가 크지 않은 안정적인 자료만을 추출한 후, 시간을 기준으로 연속적으로 기록된 자료만을 추출하는 방법을 사용하였다. 그 후, 급격한 변화로 인해 발생하는 이상값을 제거하기 위하여 이상치 데이터 제거에 사용되는 다양한 방법 중 IQR(Inter Quantile Range) 방식을 적용하였다. 또한, MagArrow에서 측정된 고도 자료는 1 Hz로 기록되기 때문에 20 Hz로 upsampling 해주는 과정을 실시하였다. 안정적으로 기록된 자료는 급격한 고도변화가 없다는 가정하에 1차원 선형보간기법을 적용하였다.
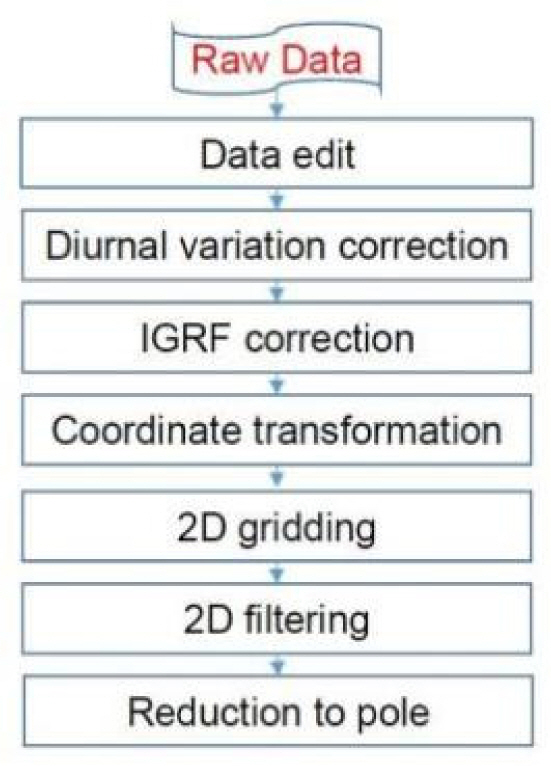
Data processing flow chart
다음으로 지구 자기장은 태양풍 등의 영향으로 하루에 수십 nT의 일변화를 일으킨다. 따라서 자료 편집이 완료된 자료는 탐사 날짜별로 자력의 일변화보정을 실시해야 한다. 이 연구에서는 상시 관측소에서 측정된 자력값의 평균을 기준으로 평균으로부터 발생하는 시간별 변화량을 획득된 자력 자료에서 제거해주는 과정을 적용하였다. 다음으로 항공자력탐사 자료는 측정의 공간과 시간에 따라 변화는 광역 자력값을 제거하여 잔여 자력값을 얻어야 해석이 쉽다. 국제 지자기 항공학협회에서 제작 및 공표한 국제 표준 지자기장을 기준으로 보정을 시행하였다.
다음으로 자료의 정확한 위치와 분석을 위하여 위치 좌표를 미터 단위로 변환한 후, 2차원 격자 화 과정을 수행하였다. 저주파 투과 필터링을 적용하여 고주파 잡음을 제거하였다. 마지막으로 자기극 변환(Reduction To Pole, RTP)기법을 적용하여 자기 기울기(magnetic inclination)에 대한 자력 데이터의 의존성을 제거해주어 보다 정확한 이상체의 위치를 해석할 수 있도록 하였다.
Fig. 4는 100 m 높이에서 측정한 자기장 신호를 2차원 맵핑한 결과이다. 북쪽에 강한 자기장 신호가 기록된 것을 확인할 수 있으며, 이는 북쪽에 설치되어 있는 댐에 의한 자기 영향이 기록된 것으로 분석된다. 따라서 이 연구에서 탐지하고자 하는 강자성 표적에 의한 자기장이 중앙에 있음에도 불구하고, 북쪽의 강한 배경값보다 상대적으로 신호가 미약하여 탐지 대상 체에 의한 자기장 확인이 어렵다.
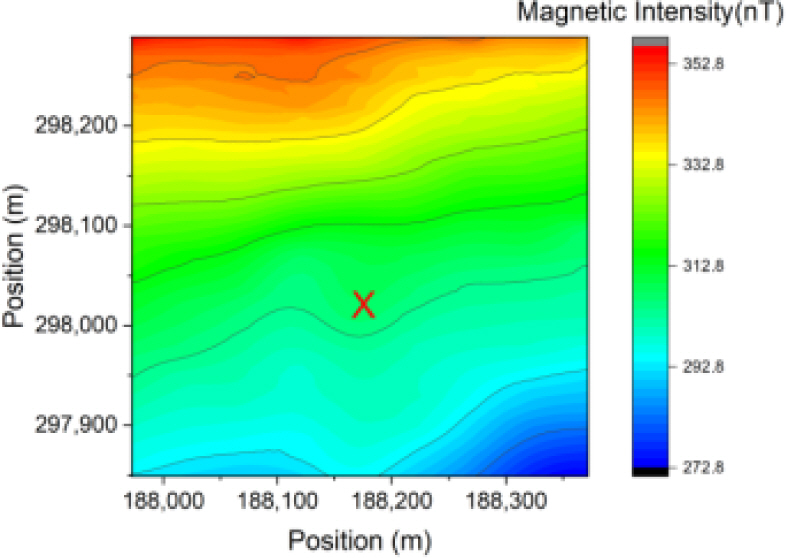
Two-dimensional mapping of magnetic field signals measured at a height of 100 m
더욱 정확하게 강자성 표적만의 신호를 분석하기 위하여 같은 지역에서 강자성 표적이 없을 때 자기 이상 신호를 측정하였고, 이를 배경 자기장이라고 명명한다. Fig. 4의 결과에서 배경 자기장을 뺀 결과는 Fig. 5와 같다. Fig. 5에서 중앙 부분에 강자성체 표적에 의한 자기 이상 신호가 나오는 것을 확인하였다. 덧붙여, Fig. 4의 결과에서 일 년 전에 측정한 배경 자기장을 뺀 결과도 Fig. 5와 유사한 자기 이상 신호가 나오는 것을 확인했다.
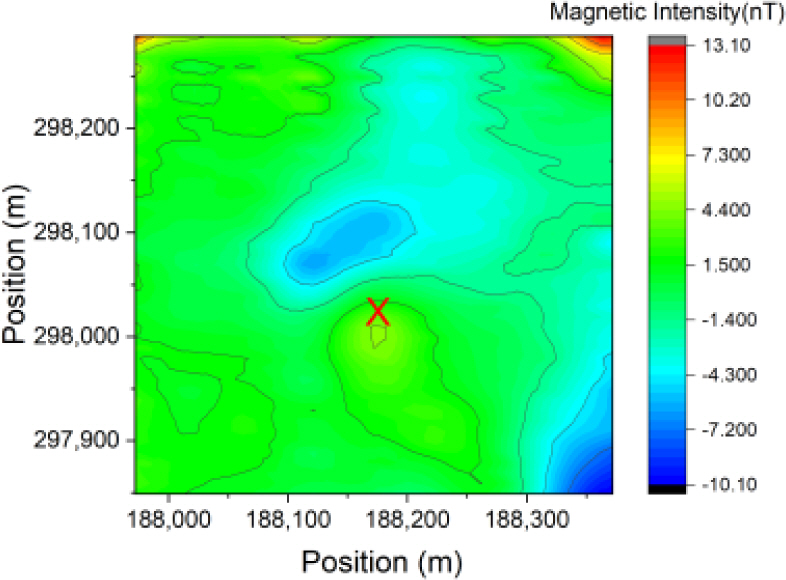
2D mapping of magnetic field signal with the background field removed at a height of 100 m
Fig. 5의 결과에 RTP 신호처리를 거친 그래프는 Fig. 6과 같다. 강자성 표적 위치에 정확하게 이상체가 탐지됨을 확인할 수 있으며, 수 nT 정도의 자기 이상값이 기록됨을 확인할 수 있다.
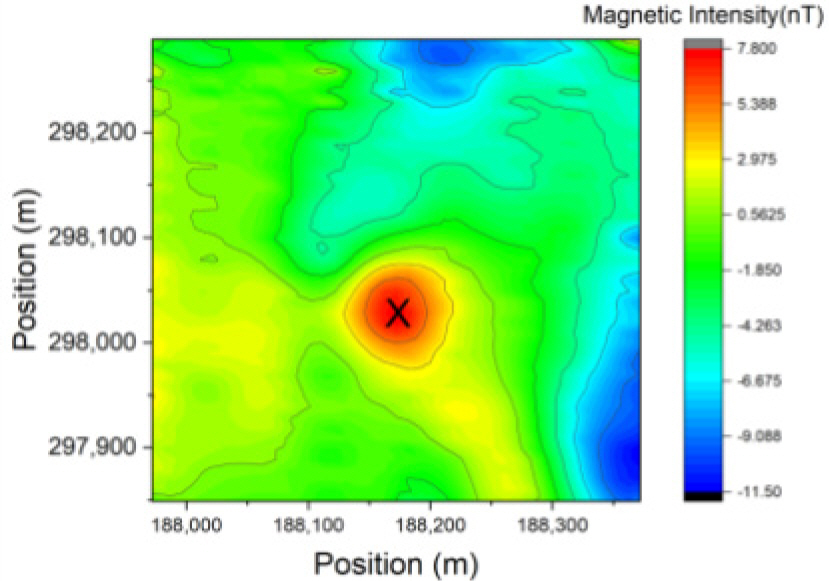
Magnetic anomaly signal through RTP signal processing
Fig. 4의 결과에 RTP 신호처리를 거친 그래프는 Fig. 7과 같다. 단일 극(Single Pole)이 형성된 위치는 A, B, C와 같다. 위치 C의 경우, 극이 형성된 범위가 100 m를 넘기 때문에 강자성 표적과 같은 인위적인 산물에 의해 자기 이상 신호가 형성되었다고 보기 어렵다.
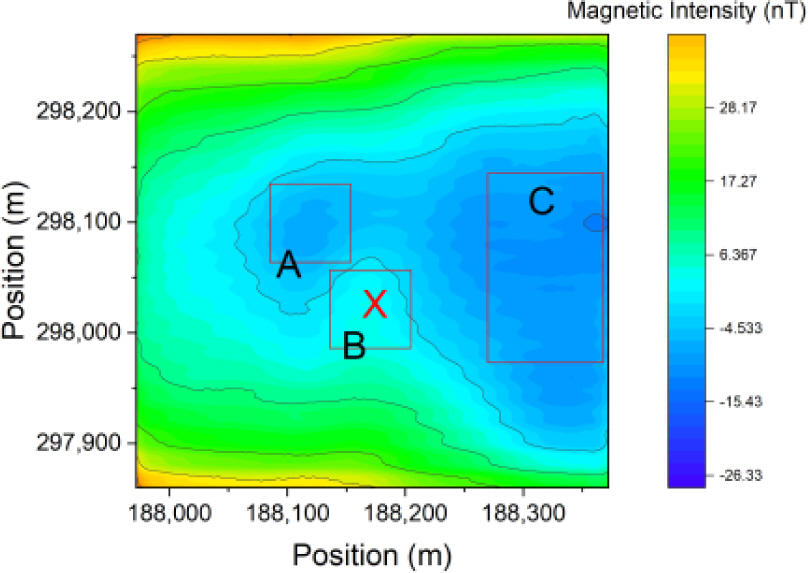
2D mapping of magnetic field signals obtained through RTP signal processing of data measured at a height of 100 m
강자성 표적의 위치를 특정하기 위해, 드론의 비행 방향으로 거리에 따른 자기장 변화의 미분을 수행했다. 이에 관한 결과는 Fig. 8과 같다.
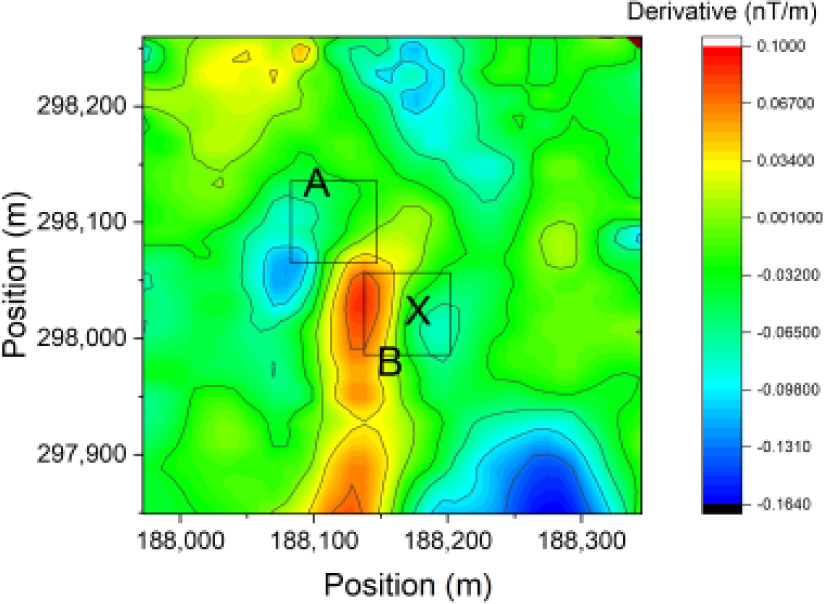
The result of differentiating the magnetic field change according to the distance in the drone flight direction
Fig. 8을 보면, Fig. 4에서 확인되는 거시적인 자기장 변화에 의해 볼 수 없었던 이상체의 변화가 미분 과정에서 살아나 다수의 이상체 위치가 확인된다. Fig. 7에서 특정한 위치 A와 B를 보면, 위치 A는 자기 이상 신호로부터 50 m 벗어나 있다. 위치 B는 자기 이상 신호와 일치한다. 이와 같이, 배경 자기장 측정 없이 RTP와 비행 방향으로 거리에 따른 자기장 변화의 미분을 통해 강자성 표적의 위치를 특정할 수 있다.
100 m 높이에서 전체적인 지형을 스캔한 후, 강자성 표적이 있다고 의심하는 지역은 비행 고도를 낮추어 정확하고 강한 자기장 신호를 측정할 수 있다. 해당 실험에서는 50 m로 낮추어 자료를 획득하였으며 결과는 Fig. 9와 같다.
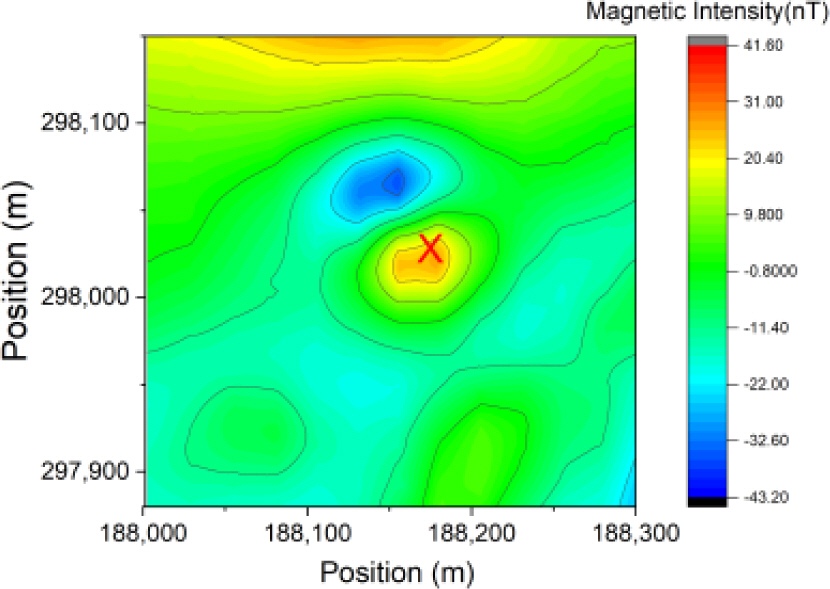
Two-dimensional mapping of magnetic field signals measured at a height of 50 m
추가적인 배경값의 제거나 신호 처리 없이 중앙 부분에 강자성 표적에 의한 자기 이상 신호가 선명하게 나타남을 확인할 수 있다. 신호 크기는 수십 nT 이다. Fig. 8을 보면, 북쪽과 남쪽에 각각 자기 이상 신호가 100 m 이상 넓게 퍼져 있다. 이는 강자성 표적과 같은 인위적인 산물에 의해 형성된 자기 이상 신호라고 보기 어렵다. 개활지에 설치된 철근 구조물(전차 도로)과 지하 광물 등이 해당 자기 이상 신호 원인이라고 추정한다.
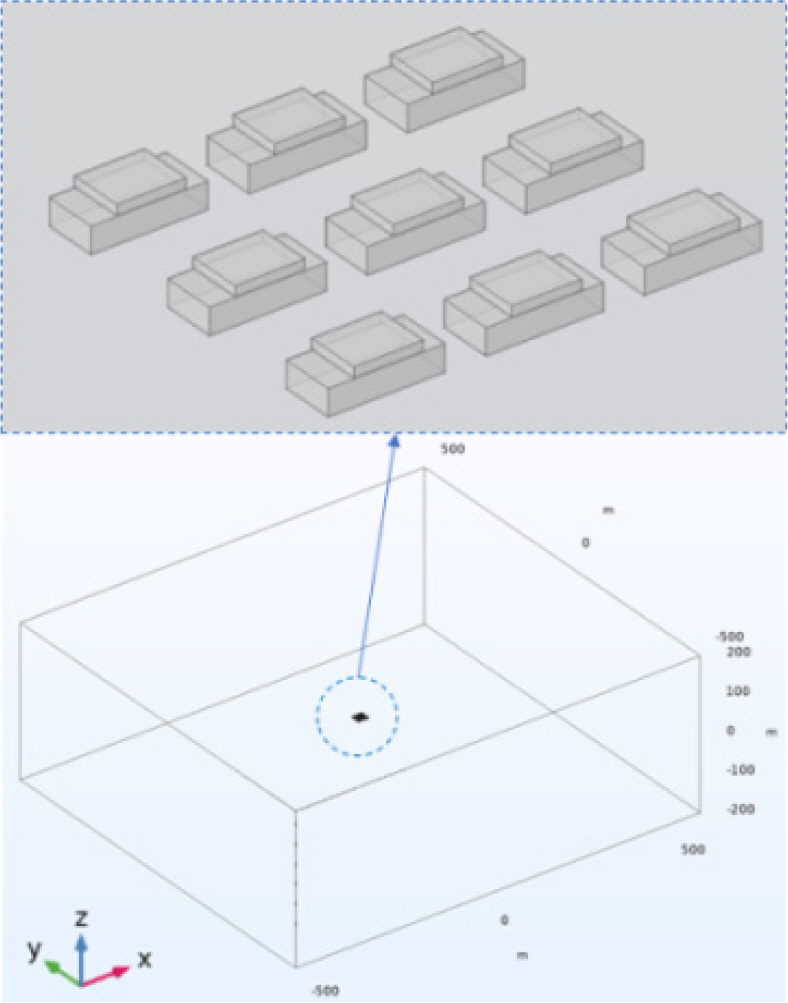
Simulation model and target geometry
3. 강자성 표적에 의한 자기 이상 시뮬레이션
강자성 표적에 의한 자기 이상 신호는 지표 혹은 지하에 분포하는 자성 물질이 만드는 배경 자기 신호와 함께 측정된다. 자기장 신호의 세기는 배경 자기장과 표적에 의한 자기장의 벡터 합의 크기로 주어지기 때문에, 표적에 의한 신호를 분리해 내는 것이 어렵다. 배경 자기장 속에서 표적이 만드는 신호의 특성을 분석하기 위해 강자성 표적에 의한 자기 이상 신호를 시뮬레이션을 통해 분석했다.
강자성 표적이 만드는 자기 이상 신호는 지구 자기장에 의해 유도된 자화와 표적의 자체 자화가 형성하는 자기장의 합이다. 표적의 자체 자화는 표적의 부분이 가지고 있는 자체 자화의 합으로 표적의 모양과 재질 등에 따라 달라지는 양이므로 표적마다 다른 값을 갖는다. 다만, 실험에 사용된 표적은 육군에서 운용 중인 강자성 표적을 사용했기 때문에 자체 자화를 확인하기는 어렵다. 따라서, 본 시뮬레이션에서는 자체 자화가 없는 상태에서 표적이 지구 자기장에 의해 유도 자화가 발생하여 지구 자기장이 왜곡되는 현상을 분석하였다.
시뮬레이션은 COMSOL multiphysics 5.5를 이용해 수행했다. 복잡한 형상은 원거리에서의 자기장 왜곡에는 큰 영향을 주지 않기 때문에 실제 모델의 모양을 단순화했으며, 표적은 가로, 세로 3×3을 각각 10 m 간격으로 배치하여 실험과 동일하게 하였다. 여기서 x 축은 북쪽, y축은 서쪽, z축은 지면에서 수직인 위쪽을 나타낸다. 시뮬레이션 영역은 x, y축은 1 km, z축은 0.4 km이며, 표적은 시뮬레이션 영역의 중앙에 위치하도록 하였다.
자기 이상 시뮬레이션을 위해 입력되는 표적의 값은 형상의 크기와 재질의 상대 투자율 값이다. 상대 투자율은 공기의 투자율 대비 물체의 투자율로, 여기서는 탄소강(Carbon Steel)의 투자율을 입력하였다.
표적은 사각 상자 두 개를 붙인 형태로 단순화하였으며, 실험 시 표적이 바라보는 방향이 북쪽(x) 정방향이 아니었기 때문에 모델의 z축 회전을 통해 방향을 실험과 동일하게 하였다. 지구 자기장의 값은 실험이 이루어진 지역에서의 IGRF 값을 이용해서 자기장 세기(Total intensity)와 복각(Inclination), 편각(Declination) 값을 구하였다. 모델 및 자기장 입력값은 Table 1과 같다.
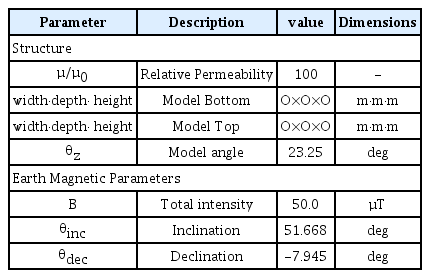
Simulation input parameters
Fig. 11은 xy 평면에서 지면으로부터 50 m 떨어진 상공에서의 자기 이상 신호의 맵을 보여준다. 측정값인 Fig. 11(a)는 측정 장소 주변의 물체들로 인하여 북쪽에 큰 자기장이 탐지되지만, 중앙 부분에 표적이 만들어내는 자기 이상 신호를 확인할 수 있다. 자기장의 작고 큰 지점이 좁은 공안에 집약되어 나타나는 것이 특징이다. 이러한 특징은 Fig. 9(b)와 같이 시뮬레이션을 통한 자기 이상 신호에서 유사하게 분석했다.
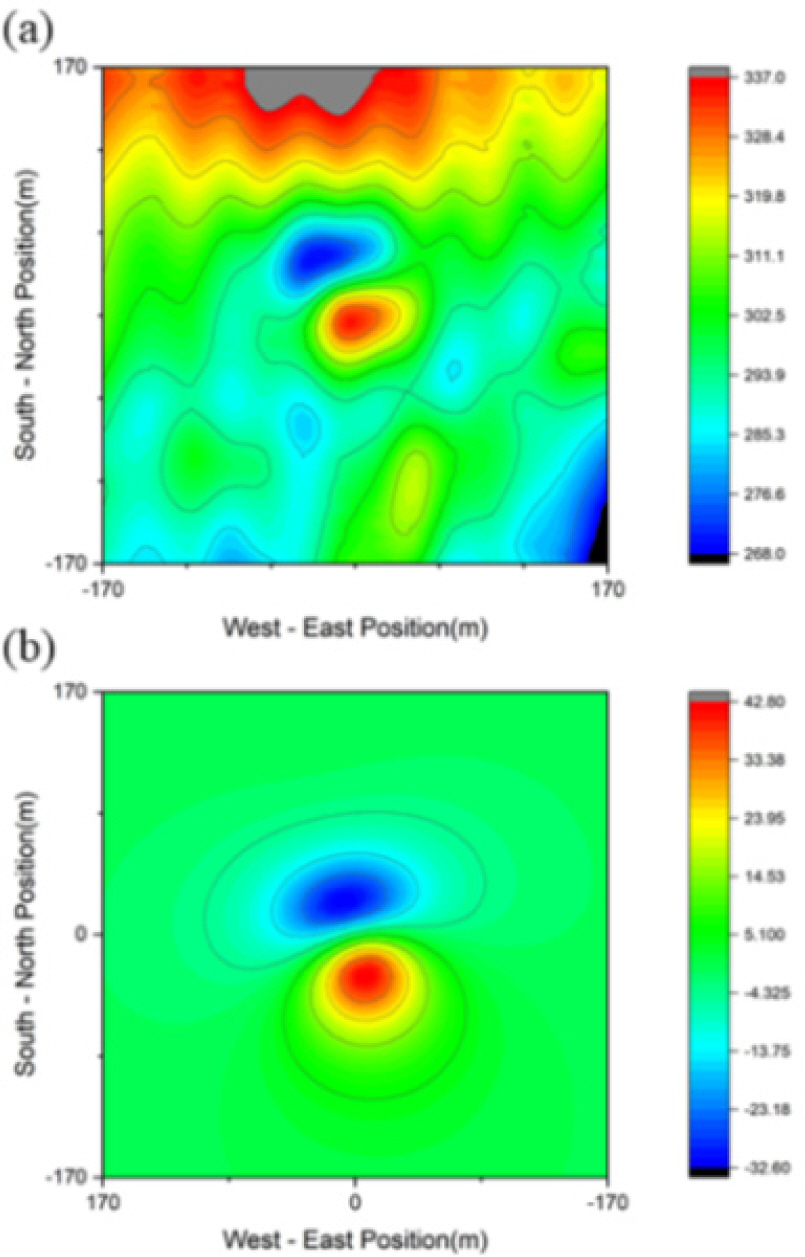
2D mapping of magnetic field signal at a height of 50 m. (a) Measurement data (b) Simulation data
자기장의 낮고, 높은 부분이 특정 지역에 집약적으로 나타나는 현상을 자기 이상 신호라 한다. 이는 강자성 표적의 배경 자기장인 지구 자기장의 복각 때문에 발생하며, 이를 시뮬레이션에서 확인했다.
Fig. 12는 지구 자기장의 복각을 각각 51.668 °와 지면에 수직인 90 °로 설정했을 때 나타나는 xz 평면에서의 자기장 맵을 나타낸다.

Result of magnetic field map simulation by ferromagnetic target in xz plane. (a) θinc = 51.67 ° (b) θinc = 90 °
시뮬레이션 결과를 보면, 복각이 90 ° 일 경우엔 지면에 남북 대칭적으로 자기장의 변화가 발생한다. 반면, 복각이 51.67 ° 일 때 강자성체를 중심으로 남쪽은 큰 자기장, 북쪽으론 작은 자기장이 발생한다. 여기서 복각이 아닌 편각이 변하면 남북으로 발생한 자기장의 최대-최소 지점이 편각만큼 회전되며, 이것은 Fig. 11(b)에서도 확인할 수 있다. 실제 야외에서 측정한 자기장 맵을 통해 표적의 위치를 탐지하기 위해서는 복각과 편각에 대한 보정이 필요하다. 지구 자기장의 복각과 편각에 의한 영향은 강자성체 표적의 형상에 따라 변화할 것으로 판단한다.
Fig. 13은 높이에 따른 자기 이상 신호의 크기 변화에 대한 시뮬레이션 결과를 나타낸다. 크기 분석을 위해 배경 자기장을 제거하였다. 자기 이상 신호는 표적을 중심으로 한 파장의 사인파와 유사한 형태를 보인다. 표적에 의한 자기 이상 신호 크기는 자기 이상 신호의 최댓값에서 최솟값을 뺀 값으로 정의하였으며, 이론상 높이가 높아질수록 거리의 세제곱에 반비례한다. 즉, 50 m에서 100 m로 탐지 높이가 상승하면, 자기 이상 신호는 1/8로 작아진다.
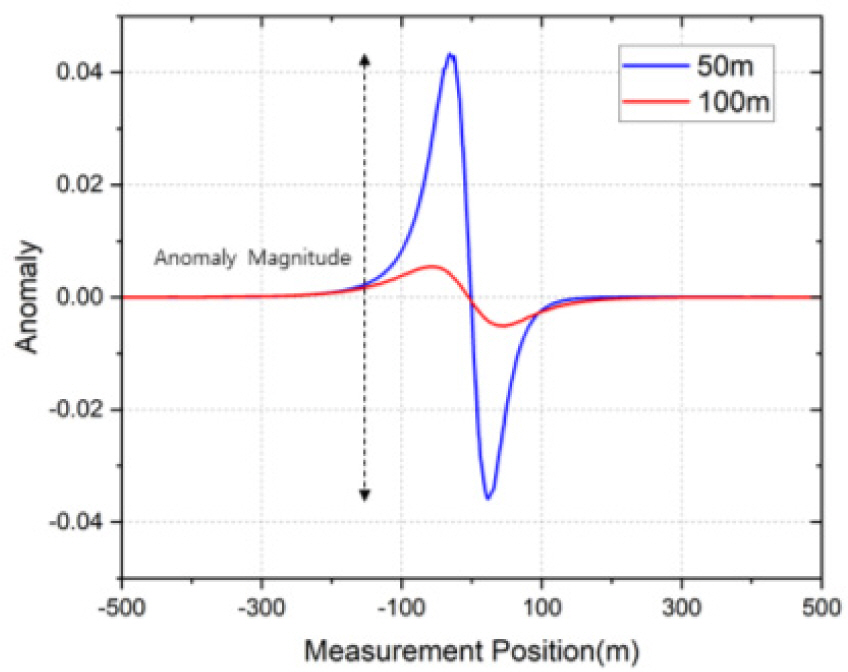
Magnetic anomaly signals by simulation
Fig. 14는 탐지 높이에 따른 자기 이상 신호의 시뮬레이션 값과 실험값을 비교한 그래프이다. 여기서 측정 포인트 1은 전남 OO에서, 2는 강원도 OO에서 측정한 값이다.
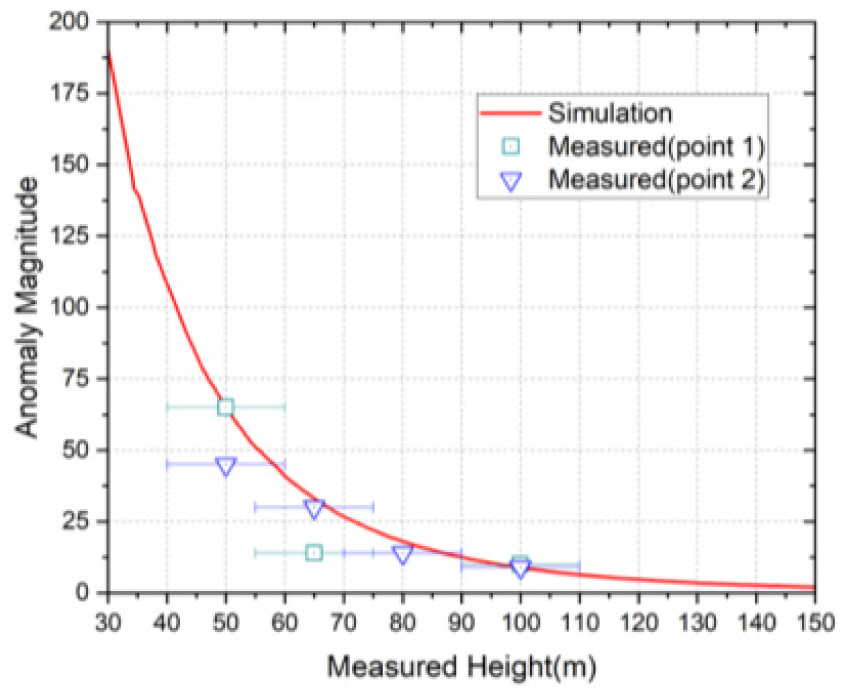
Comparison of simulation results and experimental results of magnetic anomaly signals by measurement height
각 실험장소의 복각, 편각은 큰 차이가 있지 않아 거의 동일한 시뮬레이션 결과를 보여주기 때문에 같은 결과로 비교를 하였다. 실험값의 에러 바는 GPS 기반으로 높이 측정 시 발생 가능한 10 m 오차를 나타낸 것으로, 시뮬레이션 결과는 오차범위 내에서 실험값과 유사함을 확인하였다. 또한 탐지를 수행하는 지역이 배경자기장 값이 계산된 시뮬레이션 결과 보다 크다면 그 지역에서는 주어진 고도에서 측정이 불가능함을 확인할 수 있다. 따라서 결과를 기준으로 탐지하고자 하는 지역의 배경자기장값의 변화를 토대로 탐지 가능여부, 최적의 고도 및 추가적인 자료처리의 필요성 등을 사전에 선정할 수 있다.
4. 결 론
본 연구에서는 9 대의 강자성 표적을 지상에 배치한 후, 드론에 탑재한 자기장 센서를 통해 강자성 표적에 의한 자기 이상 신호를 탐지하였다. 강자성 표적이 있을 때와 없을 때 측정한 자기장 신호를 이용함으로써, 고도 100 m에서 강자성 표적에 의한 선명한 자기 이상 신호를 탐지하였다. 고도 100 m에서 9 대의 강자성 표적에 의한 자기장 세기는 수 nT임을 확인하였으며, 이는 배경 자기장의 변화가 수 nT이하에서 측정이 가능하며, 비행 시 발생하는 잡음들과도 유사한 수치임을 확인했다. 따라서, 고도 100 m에서 9대의 강자성 표적을 측정하기 위해서는 추가적인 처리 과정이 필요하게 되고 이를 위해 드론 비행 방향으로의 거리에 대한 자기장 세기의 미분을 통해서 자기 이상체의 위치를 파악하였다. 50 m, 65 m, 80 m, 그리고 100 m에서 측정한 자기 이상 신호를 시뮬레이션과 비교한 결과, GPS 기반으로 높이 측정시 발생하는 10 m 오차 범위 내에 들어오는 것을 확인하였다. 향후 이 시뮬레이션 결과를 바탕으로 주어진 지역에서 탐사 가능 여부, 최적의 고도 및 추가적인 자료처리의 필요성 등에 대한 분석을 할 수 있을 것으로 기대된다. 드론 기반 자기 이상 탐지가 강자성 표적을 탐지하는 보조 수단으로 적절함을 확인했으며, 이는 지하구조물 탐지, 해상에서의 잠수정 탐지, 그리고 기만 전차 탐지 등에 활용될 수 있다.
Acknowledgements
이 논문은 방위사업청의 재원으로 국방과학연구소의 지원을 받아 수행된 연구임(915001104).