



기 호 설 명
τi: 비회전(irrotation) 발사체의 이동평균 시간
Gi: 비회전(irrotation) 발사체의 가속도 값
ω: 회전 각속도
r: roll 중심축과 센서의 측정 축 사이의 거리
τr: 회전(rotation) 발사체의 이동평균 시간
Gr: 회전(rotation) 발사체의 가속도 값
α: 회전 발사체의 가속도 감지 조건 비율
서 론
안전장전장치(SAD, Safety and Arming Device)는 탄의 저장, 수송, 취급 시 탄의 안전을 보장하고 외부장치로부터 장전 신호를 받아 장전 후 최적 시점에 기폭신호를 출력하여 기폭관 작동을 통해 탄두를 폭발시키는 장치이다. SAD는 크게 기계식 안전장전장치(MSAD, Mechanical SAD)와 전자식 안전장전장치(ESAD, Electronic SAD)로 구분된다. 기계 부품들과 화공 부품들의 조합으로 구성된 MSAD와 달리 ESAD는 전자 부품을 이용하여 기능을 보다 집적화 할 수 있고, 프로그래밍을 통해 개발과정에서 설계 보완 등 디버깅이 편리하여 많은 연구가 이루어졌다[1,2].
그러나 현재까지 ESAD는 외부장치로부터 탄의 발사 혹은 비행환경에 관련되는 장전 신호를 받아 장전을 수행하기 때문에 외부장치 혹은 인터페이스의 오동작으로 의도하지 않은 시점에서 장전될 가능성이 존재한다. 본 연구에서는 이를 해결하기 위해 비행환경을 감지하여 스스로 장전 신호를 발생시켜 높은 안전성과 작동 신뢰성을 갖는 ESAD를 개발하고, 비행환경 감지 기능을 탑재한 ESAD를 센서 하이브리드 ESAD(SHESAD, Sensor-Hybrid ESAD)라고 명명하였다.
ESAD는 운용특성상 안전성과 작동 신뢰성을 모두 보장해야 하므로 개발과정에서 다양한 기능/성능 검증이 필요하다. 일반적으로 ESAD 내고충격 특성을 확인하기 위해 발사체의 비행환경을 모사한 슬레드 시험으로 성능검증을 수행한다. 슬레드 시험이란 추진체를 이용하여 선로상의 발사체를 고속으로 표적까지 운반하여 표적에 충돌시키는 시험이다. 기존에는 ESAD의 기폭 기능 확인을 위해 발사체에 장착된 ESAD를 장전 완료한 후 발사하여 표적에 충돌시키는 방식으로 시험을 수행했다. 그러나 SHESAD는 기폭 기능과 더불어 비행환경 감지 기능을 확인해야 하기 때문에 새로운 시험 방법이 필요하다. 이에 SHESAD의 비행환경 감지 기능을 포함한 전체 기능/성능 확인을 위한 슬레드 시험 방법을 제안하고 슬레드 시험 및 결과에 관해 기술하였다.
비행환경 감지 기능 설계
ESAD는 비행환경을 감지하기 위해 압력, 온도, 고도, 가속도 등을 이용한다[3]. 그러나 현재까지 ESAD 에서 가속도를 활용하는 경우는 안전거리 확보의 수단으로 사용하는 경우가 대부분이다. 발사체 발사 시 추력으로 인해 발생하는 가속도는 운용 환경에 따라 일정한 경향으로 인가되기 때문에 이를 가속도 센서로 감지하여 장전 신호로 활용할 수 있다. 기존 연구에 따르면 발사체의 가속도는 비행 종말 단계보다 발사 초기에 더 큰 것으로 알려져 있다[4]. 일반적으로 ESAD의 첫 번째 장전 신호는 주로 발사체가 발사대를 이탈할 때 발생하는 케이블 분리신호를 이용하기 때문에 발사 후 초기의 가속도를 감지하여 이를 두 번째 장전 신호로 설계하는 것이 가장 적합하다.
2.1 가속도 센서 선정
비행환경 감지용 가속도 센서를 선정함에 있어 고려해야할 점은 SHESAD가 여러 유도무기에 적용될 수 있도록 비행환경 감지 기능 설계가 범용/소형화를 만족해야하는 것이다. 비행환경 감지센서로 사용 가능한 가속도 센서는 출력 형태에 따라 크게 아날로그 형태와 디지털 형태로 나눌 수 있다. 아날로그 출력 형태의 가속도 센서는 입력 전원 전압에 따라 제로-g 출력 전압이 변한다. 또한 가속도 센서의 출력을 받아 비행환경 감지 기능을 수행하는 마이크로프로세서의 Analog to Digital Converter(ADC)의 기준 전압도 입력 전원 전압에 따라 변화하므로, 별도의 정전압 회로를 구성하여 입력전원을 안정화해야 정확한 가속도 센서 출력 값을 계산할 수 있다. 그러나 이는 회로구성을 위한 공간과 시제별 별도 교정이 필요하기 때문에 범용/소형화하기 어렵다. 반면에 디지털 형태의 출력을 갖는 가속도 센서는 내부에 ADC를 포함하고 입력 전원 범위에 따른 출력 전압의 변화가 크지 않으므로 불필요한 설계 요소를 줄일 수 있다. 이에 범용/소형화 설계에 유리한 디지털 방식의 3축 가속도 센서를 선정하여 비행환경 감지 기능을 구현하였다.
2.2 비행환경 분석 및 감지 알고리즘 설계
비행 시 발사체는 추진체에 의해 발생하는 비행 방향 가속도를 갖고, 회전 유·무에 따라 비회전 발사체와 회전 발사체로 구분할 수 있다. 따라서 비행 방향 가속도 감지를 통해 비행환경을 감지하고, 회전 유·무에 따라 감지 알고리즘을 구분하여 설계해야 한다.
Fig. 1은 비행환경 감지 알고리즘 설계 시 고려해야할 SHESAD의 축 정의와 발사체에 장착되는 형상을 나타낸다. 가속도 센서가 장착된 인쇄회로판이 발사 방향에 수직으로 SHESAD에 조립되기 때문에 발사체의 비행방향 가속도는 SHESAD의 축방향, 비행 시 회전(roll)에 의해 발사체가 받는 가속도는 SHESAD의 횡방향 가속도임을 확인할 수 있다.
발사체는 사용되는 추진체의 종류와 운용방식에 따라 발생하는 비행 방향 가속도의 크기와 지속시간이 다르다. 오작동을 방지하고 동작 안정성을 향상시키기 위해 비회전 발사체의 경우 비행환경 감지 조건으로 이동평균 시간 τr [ms] 동안 Gi [G] 이상의 축방향(Y 축) 가속도가 발생하는 것으로 정하였다.
회전 발사체의 경우 비행 방향 가속도와 더불어 roll을 고려해야한다. 선행 연구에 따르면, pitch와 yaw 를 고려하지 않고 roll만 고려했을 때 가속도 센서에서 측정되는 가속도 a는 다음과 같다[5,6].
여기서 ω는 회전 각속도, r은 roll 중심축과 센서의 측정 축 사이의 거리로 가속도 센서 배치설계 시 결정되는 상수이다. 즉, ω에 의해 roll에 따른 가속도 값을 측정할 수 있다. 따라서 회전 발사체의 경우 비회전 발사체의 비행환경 감지 조건을 만족하고 시간 τr [ms] 동안 Gr [G] 이상의 횡방향(X축) 가속도가 α [%] 이상일 때 감지하도록 설계하였다.
2.3 비행환경 감지 알고리즘 검증시험
설계한 비행환경 감지 알고리즘 검증을 위해 비행운동 시뮬레이터(FMS, Flight Motion Simulator)를 활용하여 시험을 수행하였다. FMS는 Fig. 2와 같은 장비로, 3축 자세 제어를 통해 2축 가속도 인가 조건을 구현하여 회전 발사체 운용 조건에서의 비행환경 감지 알고리즘 동작을 확인할 수 있는 장비이다. Fig. 2와 같이 SHESAD를 장착한 후 검은색 원판이 회전하게 되면 원심력에 의해 SHESAD는 Fig. 1에서 정의된 축방향 가속도를 얻게 된다. 마찬가지로 FMS 하단의 빨간 기둥이 회전하게 되면 SHESAD는 횡방향 가속도를 얻게 된다.

FMS를 활용한 시험을 통해 획득한 가속도 측정값과 축방향과 횡방향 가속도를 정상 인식하였을 때 발생하는 Flag, 즉 비행환경 감지 알고리즘의 작동상태를 Fig. 3에 나타내었다. Fig. 3을 보면 축방향 가속도가 인가된 시점으로부터 42.40 s 후에 Gi [G] 이상의 가속도를 정상 감지하여 축방향 인식 Flag를 출력하였고, 횡방향 가속도가 인가된 시점으로부터 39.95 s 후에 Gr [G] 이상의 가속도를 정상 감지하여 횡방향 인식 Flag를 출력하였다. 이를 통해 비행환경 감지 알고리즘 기능이 정상적으로 동작함을 확인하였다.
슬레드 시험 방법 설계
비행환경 감지 기능을 포함한 전체적인 SHESAD의 동작을 확인하기 위해서는 발사체의 실제 비행환경과 유사한 조건의 기능/성능검증이 필요하다. 그러나 실험실 환경에서의 기능/성능시험에서는 발사체의 비행환경을 모사할 수 없으므로 SHESAD의 비행환경 감지를 통한 장전 및 표적 충돌 후 기폭의 연속적인 과정 확인이 어렵다. 또한 기존 시험방법으로는 비행 종말 단계를 가정하여 ESAD를 장전 완료된 상태에서 발사체를 발사하기 때문에 표적충돌감지기능과 기폭기능만 확인이 가능하다. 따라서 초기 비행환경 감지부터 종말단계 기폭까지 전 과정의 기능/성능검증을 위해서는 새로운 시험 방법, 즉 비회전 발사체 모드의 비행환경 감지 기능을 확인하기 위한 시험 방법이 필요하다.
3.1 비행환경 감지 기능 확인을 위한 방법
3.1.1 소프트웨어 수정
ESAD는 일반적으로 이산신호인 장전 1(LOW → HIGH)과 장전 2(LOW → HIGH), 동적 신호인 장전 3(HIGH → Pulse) 신호가 순차적으로 모두 정상 수신되면 장전이 완료된다. 만약 하나의 신호라도 입력되지 않는다면 다음 장전 단계로 넘어가지 않는다. 기존의 슬레드 시험에서는 ESAD가 장전 완료 후 발사체를 발사하였지만 SHESAD는 장전 2 신호 인식이 비행환경 감지를 바탕으로 이루어지기 때문에 기존대로 시험하게 되면, 발사체 발사 시 SHESAD와 연결된 점검장비 케이블이 분리되기 때문에 장전 3 인가가 불가능하다. 즉 장전이 완료되지 않아 충돌감지 및 기폭 기능을 확인할 수 없다. 따라서 비행환경 감지 기능 확인, 장전기능 확인, 기폭에너지 충전 기능 확인, 충돌감지/기폭 기능 확인의 연속적인 알고리즘 확인을 위하여 장전 2와 장전 3 신호의 순서를 바꿔 장전 1 → 장전 3 → 장전 2 순으로 장전 신호를 인식하도록 소프트웨어를 수정 설계하였다. 이는 점검장비로 장전 1과 장전 3을 인가한 후 발사하여 비행환경 감지를 통해 장전 2 신호를 인식할 수 있도록 한 것이다.
3.1.2 구동장치 설계
구동장치는 비행 전 SHESAD에 전원을 공급하고, 점검장비를 통해 인가되는 장전 신호를 SHESAD에 전달하는 일종의 발사체용 제어장치 역할을 수행한다. 또한, 동시에 비행 중 실시간으로 확인할 수 없는 SHESAD 작동성능 관련 데이터들을 저장하여 시험 후 발사체 회수를 통해 데이터 분석이 가능하도록 설계한 장치이다. Fig. 4는 구동장치 형상이다.
구동장치에 기록한 데이터는 Table 1과 같이 8종이며, 세부 신호는 다음과 같다. 발사 이후 구동장치가 정상적으로 SHESAD에 전원을 공급하고 있는지 확인하기 위해 전원상태 신호를 기록하였다. 고전압 모니터링 신호는 SHESAD의 장전이 완료되었는지 확인하기 위한 신호로, 아날로그로 처리하면 데이터양이 매우 방대해지는 문제점이 있어서 전압을 4개의 level로 구분하고 quantization하여 데이터를 기록하였다. 트리거 신호는 슬레드 시험에서 최초 발사체 발사시점을 확인하는 신호로서, 점검장비 케이블이 분리되는 이벤트를 사용하도록 설계하였다. 이외에 SHESAD의 작동상태를 확인하기 위해 장전 1, 장전 3, 장전 2 신호, ESAD_GOOD 신호, 기폭신호 등을 기록하였다.
Table 1.
Channel configuration of data logging device
3.1.3 원격측정장치 설계
SHESAD가 장착된 발사체가 표적 충돌 후 회수장치에 진입 시, 고충격으로 인해 구동장치에 저장된 데이터가 손상될 경우를 대비하여 원격측정장치(TLM, telemetry)를 개발하여 적용하였다. 원격측정장치는 슬레드 선로 상에서 발사체 이동 시 SHESAD 작동상태를 확인하기 위한 장치로서, Fig. 5와 같이 발사체에 송신기를 장착하고 슬레드 선로 출발지와 표적지에 수신기를 설치하여 데이터를 수신할 수 있게 하였다. 총 4채널(CH)의 디지털 신호를 획득하도록 원격측정장치를 설계하였다. CH1은 100 G 이상의 횡방향 가속도 확인 신호로, 이는 슬레드 시험에서 발생하는 횡방향 진동을 확인하기 위함이다. CH2는 비행환경 감지 센서부에서 출력하는 장전 2 신호로, 비행환경 감지가 정상적으로 작동하는지 확인하기 위한 신호이다. CH3는 크러쉬스위치(crush switch) 신호로, 일반적으로 장전 3 신호 인가 후 종말 단계에서 표적 충돌을 인지하였는지 확인할 수 있는 신호이다. CH4는 구동장치에서도 확인할 수 있는 고전압 모니터 신호이다. TLM에서는 1,000 V 이상이면 HIGH가 출력되도록 설계하였다. Table 2에 TLM 신호 구성을 정리하였다.

3.2 충돌감지/기폭기능 확인을 위한 방법
발사체가 표적에 충돌할 때 충돌감지를 위해크러쉬스위치를 발사체 전방부 스킨에 장착하였다[7]. 크러쉬스위치는 얇은 띠처럼 되어있고 표적 충돌 시 유연성 기판 내부 이격된 단자 간의 접촉을 통해 전기적 신호를 SHESAD에 전달하도록 설계된 충격감지 장치이다. Fig. 6은 크러쉬스위치 장착 형상을 나타낸다.

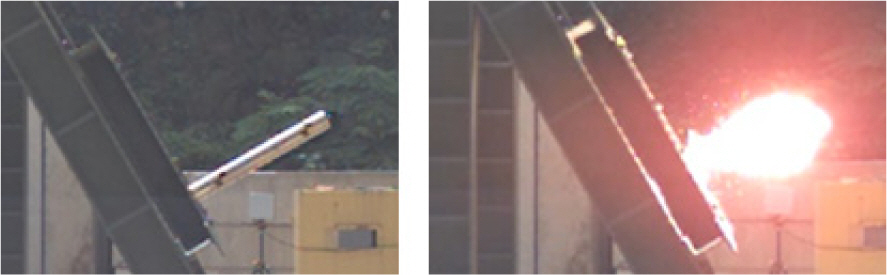
SHESAD의 기폭기능 확인은 구동장치와 TLM에서 관련 신호를 측정하도록 하였지만, 육안으로 기폭기능을 확인하기 위해 화염을 더욱 더 선명하게 하는 폭음통을 추가로 장착하였다. 폭음통은 Fig. 7과 같이 발사체 전방과 SHESAD 기폭관 사이에 장착하여 기폭신호 발생 시 기폭관과 폭음통이 연쇄 기폭 되도록 구성하였다. 또한 폭음통의 화염을 확인하기 위해 관찰창(window)을 설치하였고, 이를 고속카메라로 계측하였다.
3.3 시험장 구성
슬레드 시험은 SHESAD를 장착한 발사체를 슬레드 위에 밴드를 이용하여 구속하고, 추진기관을 점화하여 가속한 후 종말 단계에서 밴드를 절단하여 발사체를 직선 자유 비행시킨 후 표적에 충돌시키는 방법으로 발사체의 특성을 확인하는 시험이다. 전체적인 시험장 구성은 Fig. 8과 같다. 표적 충돌 후 발사체를 회수하기 위한 모래를 쌓아놓은 회수장치는 표적 후방에 설치하였다. 또한 슬레드 선로 출발지와 표적지에 TLM 수신기를 설치하여 SHESAD 작동상태를 확인하는 데이터를 수신할 수 있게 하였고, 표적지에는 고속카메라를 설치하여 발사체의 자세, 종말 비행 속도 계측 및 기폭기능 등을 확인할 수 있도록 하였다.
시험결과
4.1 구동장치 데이터 분석
Fig. 9는 회수된 구동장치에 기록된 데이터이다. TRIG_IN 신호를 기준으로 시간 축을 조정하였다. BAT_PWR 신호는 HIGH를 유지하는 것을 볼 수 있는데, 이는 시험 간 구동장치에서 SHESAD에 공급하는 전원이 정상임을 알 수 있다. 고전압 모니터 신호(HV_MON)는 0.659 s에 1,000 V 이상 충전 완료되었고, 3.060 s에 방전되었음을 알 수 있다. 이는 기폭신호(FIRE 1)를 통해 발사 시점 기준으로 3.060 s 후에 표적과 충돌하여 고전압이 방전된 것을 의미한다. 고전압 충전 완료부터 표적 충돌 사이의 시간차는 2.401 s로, 이는 TLM 계측 결과와 같다. TRIG_IN 신호는 LOW에서 HIGH로 변화한 것을 알 수 있는데, 이는 정상적으로 발사체 발사 시점을 인식한 것을 나타낸다. 장전 1 신호(ARM 1)는 HIGH로 기록되었는데 구동장치는 TRIG_IN 기준 3.000 s 이전부터 저장되기 때문에 발사 3.000 s 이전에 인가된 장전 1 신호 (ARM 1)는 인가 후 상태만 기록되었다. 장전 3 신호 (ARM 3)는 - 0.648 s부터 펄스형태의 신호가 출력된 것을 볼 때, 발사체 발사 전 점검장비 스위치를 통해 장전 1 신호 인가 후 장전 3 신호가 SHESAD에 정상적으로 인가되었음을 알 수 있다. 장전 2 신호(ARM 2)는 발사 0.110 ms 이후 가속도를 감지하여 인식되었다. 한편 ESAD의 상태를 출력하는 ESAD_GOOD 신호도 - 0.433 s부터 펄스폭이 변화함을 볼 수 있는데, 이는 SHESAD가 정상적으로 장전 3 신호를 수신한 후 발사체가 발사되었음을 나타낸다.
4.2 TLM 데이터 분석
Fig. 10은 슬레드 시험에서 획득한 TLM 신호 데이터를 나타낸 것이다. TLM 데이터로는 발사체의 정확한 발사 시점을 알 수 없어 구동장치 데이터를 이용한 발사시점을 기준으로 데이터 분석을 수행하였다. CH1은 발사체 횡방향 가속도 100 G 이상을 인식하는 신호로, 선로 상에서는 발생하지 않고 표적 충돌 후 약 4.600 ms 이후 발생함을 확인하였다. 발사체의 노즈(nose)부에 설치된 크러쉬스위치 기준으로부터 631 mm 후방에 SHESAD가 장착되어 있고 발사체의 종말속도는 154 m/s로 계측되어, 오차를 고려하면 처음 표적 충돌 후 SHESAD가 장착된 위치까지의 관통 시간이 약 4.097 ms로 계산된다. 따라서 횡방향 가속도는 발사체의 SHESAD 장착 부분이 표적을 통과하면서 생기는 충격에 의해 감지된 것으로 보인다. 기폭관 및 폭음통은 SHESAD에 장착되기 때문에 만약 기폭에너지에 의한 충격이라면 표적 충돌 후 약 0.100 ms 이후에 CH1이 반응하였을 것으로 판단된다. CH2는 장전 2 신호로 표적 충돌하기 2.986 s 이전, 즉 발사 시 인가되는 축방향 가속도를 정상 인지함을 알 수 있고, 이를 통해 SHESAD의 비행환경 감지 기능이 정상적으로 동작함을 확인하였다. CH3의 크러쉬스위치와 CH4의 고전압 모니터 신호를 보면 표적 충돌하기 2.400 s 이전 고전압이 1,000 V 이상 충전하여 장전 완료됨을 확인할 수 있다. 이는 구동장치 계측 결과와 동일한 것으로, 시험 결과 데이터의 신뢰성을 확인할 수 있다. 또한 표적 충돌과 동시에 크러쉬스위치가 작동하여 0.100 ms 이후 기폭에너지가 방전되어 정상 기폭 되었음을 알 수 있다.
4.3 가속도 데이터 분석
Fig. 11과 Fig. 12는 슬레드 시험 시 비행환경 감지 센서부에서 측정한 가속도 데이터이다. 먼저 Fig. 11은 Y축 가속도와 이동평균 시간 τi [ms] 동안의 Y축 가속도를 나타낸다. 2.2절에서 설명한 바와 같이 추력이 발생하기 시작한 시점으로부터 약 0.074 s 후에 Gi [G] 이상의 가속도를 정상 감지하여 장전 2 신호를 출력하였음을 알 수 있다. 또한 추진기관의 추력은 발생 시작부터 약 0.773 s 후에 Y축 가속도 크기가 급격히 줄어드는 것을 볼 수 있는데, 이 시점이 추력이 종료된 시점임을 알 수 있다.
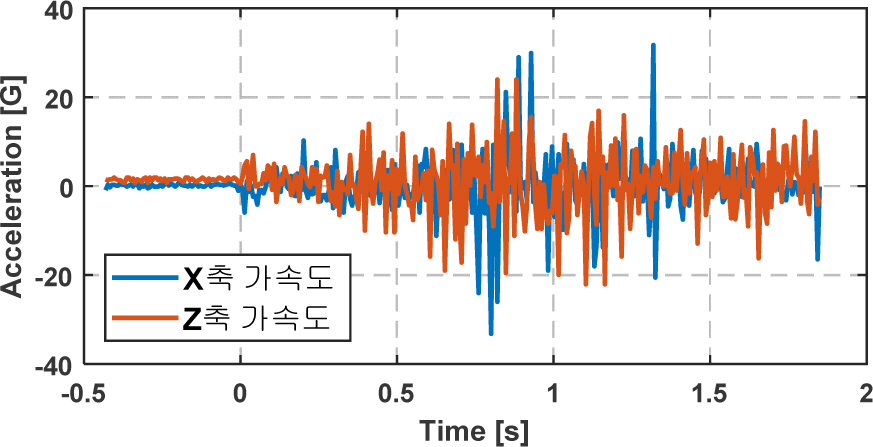
Fig. 12는 발사체의 X축과 Z축 가속도 측정값이다. X축, Z축 모두 추력 종료시점에 가장 큰 값이 발생하였는데, 이는 추력이 종료되면서 진행 방향으로 힘이 약해지면서 발사체에 횡방향과 종방향 진동이 많이 발생되었고, 이로 인해 X축과 Z축의 가속도 값이 크게 측정된 것으로 판단된다.
결 론
본 논문에는 장전 신호를 외부장치에 의존하는 기존 ESAD의 단점을 보완하기 위해 비행환경 감지 기능을 탑재한 SHESAD를 제안하였다. 발사체의 비행환 경은 3축 가속도센서로 감지할 수 있으며, 가속도센서의 출력값을 측정하여 장전 신호 설계에 이용하기 위해 범용/소형화에 유리한 디지털 출력 형태의 가속도 센서를 선정하였다. 비행환경 감지 알고리즘은 발사체의 회전 유·무에 따라 회전·비회전 발사체로 구분하여 설계하였다. 비행환경 감지 알고리즘은 3축 회전이 가능한 FMS 장비를 이용하여 시험하였고, 알고리즘이 정상적으로 작동함을 확인하였다.
SHESAD의 비행환경 감지 기능을 확인하기 위해서는 발사체의 발사 환경을 모사하는 기능/성능 검증이 필수적이다. SHESAD의 기능/성능 검증시험을 위해 3 가지 시험 방법을 본 논문에서 제안하였다. 첫 번째 방법으로 슬레드 선로에서 비행환경 감지와 장전완료 및 충돌감지/기폭 기능을 연속적으로 확인할 수 있도록 비행환경 감지 신호인 장전 2 신호를 가장 마지막 장전 신호로 인식하게 시험용 소프트웨어로 수정하였다. 두 번째로 구동장치를 이용하여 발사체 발사 시 실시 간으로 확인할 수 없는 데이터와 SHESAD의 상세 작동 신호를 시험 후 회수한 구동장치에서 획득한 데이터를 통해 분석할 수 있게 하였다. 마지막으로 원격측 정장치를 이용하여 슬레드 시험 후 회수된 구동장치에 서 데이터 복원이 안 될 경우를 대비함과 동시에 비행 중 실시간으로 시험데이터를 확인할 수 있게 하였다.
제안한 시험 방법을 바탕으로 슬레드 시험을 수행 하였고, 시험결과 모든 기능이 정상 동작함을 확인하였다. 구동장치 및 원격측정장치 데이터와 비행환경 감지센서부에서 측정한 가속도 데이터의 비교 분석을 통해 발사 시 발생하는 비행축 방향 가속도를 정상적으로 인식하여 SHESAD의 장전 완료함을 확인하였다. 또한 고속카메라를 통해 표적 충돌 시 크러쉬스위치의 표적충돌감지 기능과 SHESAD의 기폭 기능이 정상 작동함을 확인할 수 있었다. 본 시험결과를 통해 설계한 비행환경 감지 기능이 정상 동작함을 확인하였고, 제안한 슬레드 시험 방법이 비행환경 감지 기능을 포함한 전체적인 SHESAD 기능 확인에 적합함을 확인하였다. 추후 발사 환경에서 비행환경 감지 기능 확인이 필요한 유사 시험에도 본 시험방법이 적용 가능할 것으로 기대된다.




