프로펠러 후류 간섭 효과를 고려한 투척식 무인기 요잉모멘트 예측
Prediction of Yawing Moment for a Hand-Launched UAV Considering Interference Effect of Propeller Wake
Article information
Abstract
Abstracts
In this paper, three-dimensional unsteady computational fluid dynamic(CFD) analyses based on overset grid technique have been performed for a hand-launched unmanned aerial vehicle(UAV) considering the wake effect generated by a rotating propeller. In addition, the defection of rudder is considered in order to consider to predict the equilibrium condition of yawing moment during cruise flight conditions. It is importantly shown in this paper that the wake interference effect of the propeller is significant to accurately predict the yawing moment of the UAV and the yawing moment coefficient corresponding to a flight speed can be different because of its different amount of wake effect due to the different rotating speed of the propeller.
기 호 설 명
Reθc: 임계(critical) Reynolds number
S: 변형률(strain rate)
Tu: 국부 난류 강도
λθ : Thwaites 압력 구배 계수
1. 서 론
최근 기술 발달로 무인기(unmanned aerial vehicle, UAV)는 고정익 및 회전익 형태로 민군에서 다양한 크기와 종류로 활용되고 있다. 이 중에서 군사용 무인기는 대부분 정찰 목적의 운용이 대부분이며 Fig. 1은 한국 육군에서 운용 중인 투척식 이륙 무인기의 예를 보여주고 있다.

Operation picture of a hand-launched take-off unmanned aerial vehicle(UAV) in the republic of Korea army(ROKA)
일반적인 항공기와 마찬가지로 무인기 개발과정에서 공기역학적 특성을 분석하기 위한 대표적인 방법으로는 Fig. 2와 같이 전산유체역학(computational fluid dynamics, CFD) 기법, 풍동시험(wind tunnel test)과 비행시험(flight test) 등이 있다. 설계된 무인기 형상에 대해 풍동시험은 기본적인 공기역학적 특성 파악은 가능하나 프로펠러 후류 영향 등을 종합적으로 고려하기에는 제약이 따른다. 따라서 본 논문과 같이 정교한 CFD 모델을 활용한 유동해석 기법은 일종의 수치 비행시험이 가능하여 더 유용하게 활용될 수 있다.
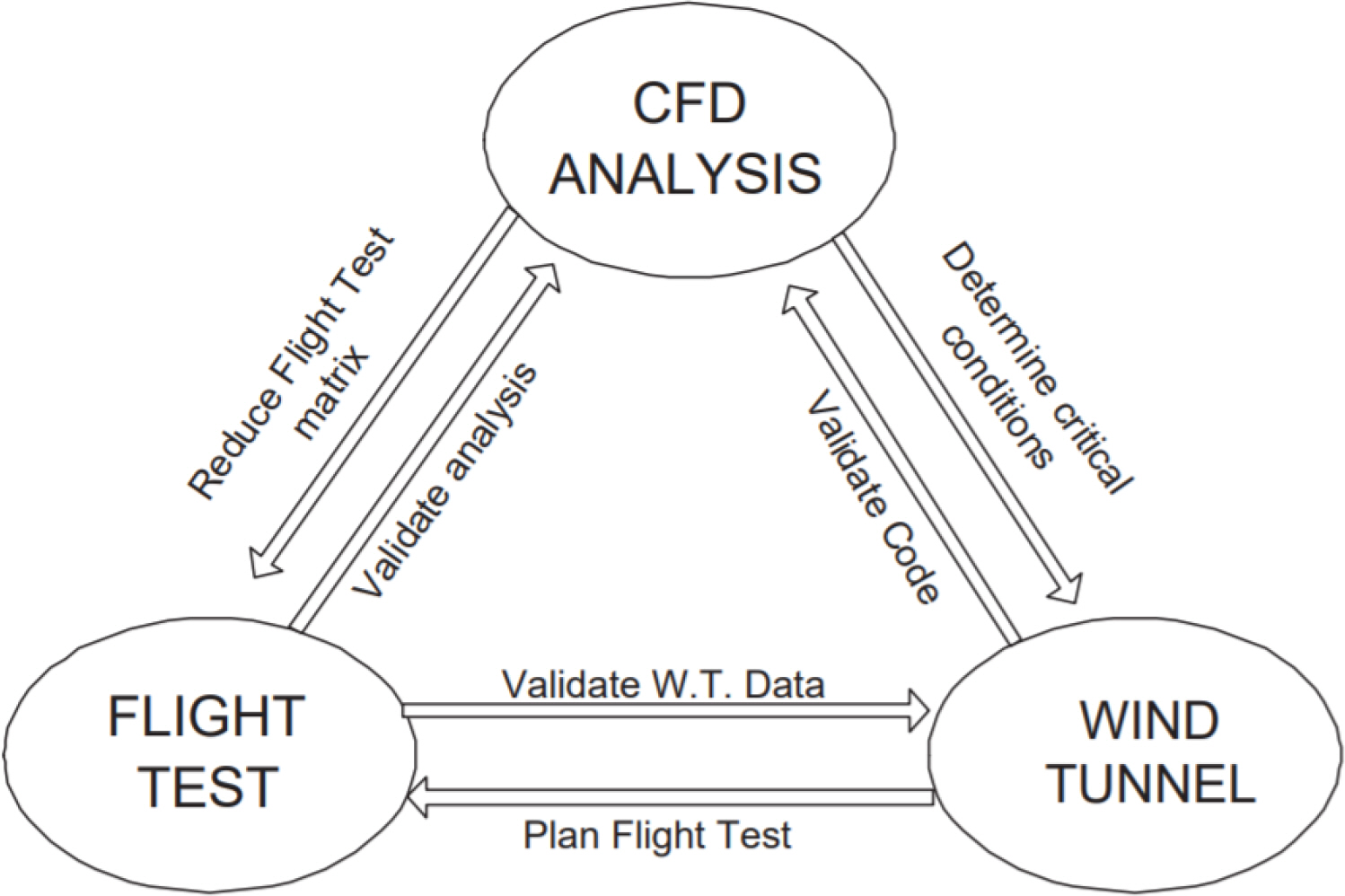
Relation between CFD, wind tunnel and flight tests
본 연구와 관련될 수 있는 선별된 기존 국내외 연구사례는 다음과 같다. 2010년 조이상[1] 등은 CFD 기법을 활용하여 초소형 무인기 추진용 MH-75 프로펠러를 설계하고, 정지 추력과 비행속도 및 회전수 변화에 관한 특성 연구를 수행하였다. 그리고 공력해석 결과를 검증하기 위해 프로펠러 추력특성에 대한 풍동시험을 수행하였다. 2012년 Fu[2] 등은 CFD 기법을 활용해 추진식 프로펠러 항공기의 프로펠러에 대한 후류 현상과 후류가 기체에 미치는 영향에 대해 연구를 수행하였다. 2014년 조정현[3] 등은 추친식 프로펠러 항공기의 Power-on 효과를 CFD 기법을 활용하여 항공기의 비행성능 및 조종 안정성에 직간접적으로 미치는 영향을 파악하였다. 2016년 Carvalho[4]는 MALE UAV(중고도 장시간 체공 무인기) 형상에 대해 SST k-w 및 γ-Reθ 난류모델을 적용한 CFD 해석을 수행하였다. 또한 윙팁과 윙렛 형상 최적화를 통해 양항비 10 % 이상 향상 및 필요동력을 15 % 이상 감소시킬 수 있음을 보였다. 2019년 Kaya[5]는 Tandem wing UAV 형상에 대해 k-∊ 난류모델을 적용한 CFD 해석을 수행한 사례가 있는데, 두 날개 사이의 후류 영향 및 안정성 특성을 고려한 공기역학적 설계에 관한 연구를 수행하였다.
본 논문에서는 CFD 기법을 활용하여 전기체 형상의 투척식 무인기 형상에 대해 고속 회전하는 프로펠러와 생성된 후류 간섭 효과를 고려한 비정상 유동해석을 수행하였다. 또한 이를 통해 실제 비행조건과 유사하게 동체 및 프로펠러 후류 간섭 효과를 모두 고려하여 요잉모멘트(yawing modment)를 예측하고 특성을 분석하고자 한다.
2. 수치해석
2.1 해석모델
본 연구에서 고려한 무인기 및 프로펠러 형상는 Fig. 3과 같으며, pusher type으로 프로펠러가 장착된다. 무차원 공력계수 정의를 위한 날개투영면적(wing planform area)는 0.485 m2, 수평미익투영면적(horizontal tail planform area)는 0.056 m2 그리고 무인기의 총 참조투영면적은(total reference planform area)는 0.541 m2로 정의하였다. 프로펠러는 소형 무인항공기에서 일반적으로 사용되는 고정 피치(fixed pitch) 방식이며, 기체 후방에서 전방을 향해 바라볼 때 시계방향으로 회전한다. 프로펠러 최대 회전수는 약 13,000 rpm(216.6 revolution/sec = 1,360 rad/sec)이며, 프로펠러 허브 형상을 포함한 반경은 0.1548 m이다.
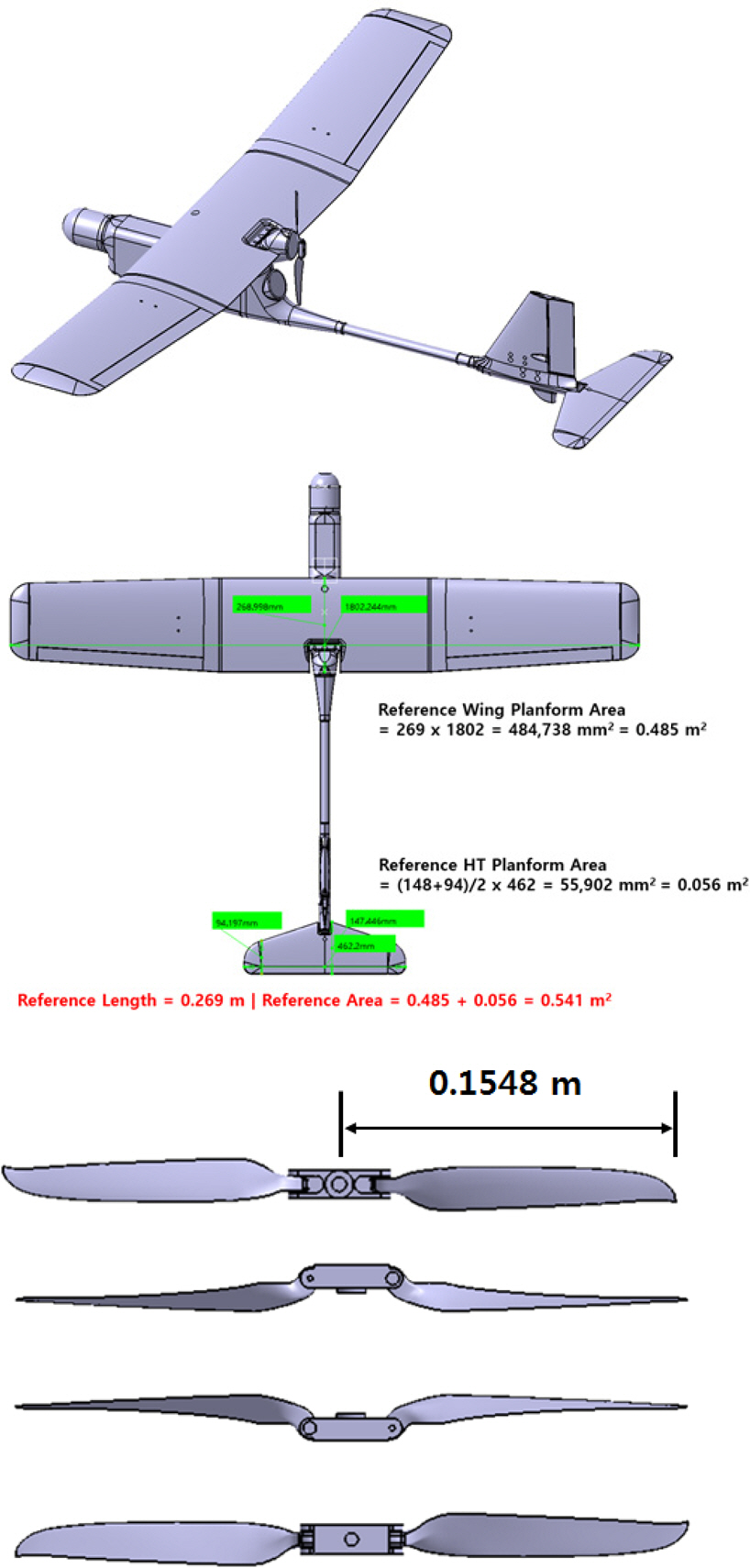
UAV geometry and propeller shapes
2.2 격자 및 경계조건
Fig. 4는 Fig. 3의 형상에서 프로펠러 형상을 제외하여 프로펠러 후류 간섭 효과를 고려하지 않는 해석을 위한 3차원 CFD 유동해석 격자를 보여주고 있다. 외부 유동장의 크기는 유동, 높이 방향으로 동체 길이 1.44 m의 약 20배인 30 m, 스팬 방향으로 스팬 길이 1.8 m의 5배인 9 m로 설정하였다[6]. 유동해석을 위한 CFD 격자는 polyhedron mesh로 생성하였고, 난류 점성을 고려한 경계층 격자 수는 10개로 설정하였다. 경계층 격자는 밀집도 함수를 조절하여 평균적인 y+ 값이 1 이하가 되도록 설정하였으며, 프로펠러가 없는 모델의 경우 총 셀(cell) 수는 4,626,170개이다.

CFD mesh for the UAV model without propeller(Total cells = 4,626,170)
Fig. 5(a)는 프로펠러 후류 간섭 효과를 제외한 경우 전기체 유동해석을 위한 경계조건을 보여주고 있다. 무인기 표면은 no-slip wall 경계조건을, 유동영역 유입면에 velocity inlet 조건과 유출면은 pressure outlet 조건을 설정하였다. 나머지 면들은 slip wall 조건으로 설정하였다. 이후에 해석결과에는 slip wall 조건으로 설정된 결과와 symmetry 조건으로 설정된 결과를 동시에 제시하였다. 유입면 및 유출면에 turbulence intensity 는 0.01, turbulent viscosity ratio는 10을 적용하였다. Fig. 5(b)는 프로펠러 후류 효과를 고려한 전기체 해석을 위한 경계조건을 보여주고 있다. 프로펠러 끝단이 최대 마하 0.6에 근접하는 속도를 가지기 때문에 압축성 효과를 고려하여 freestream 조건으로 설정하였으며, rotational domain은 overset 조건으로 설정하였다. 경계조건 입력값은 프로펠러 후류 간섭 효과를 고려하지 않는 해석과 동일하게 설정하였다.
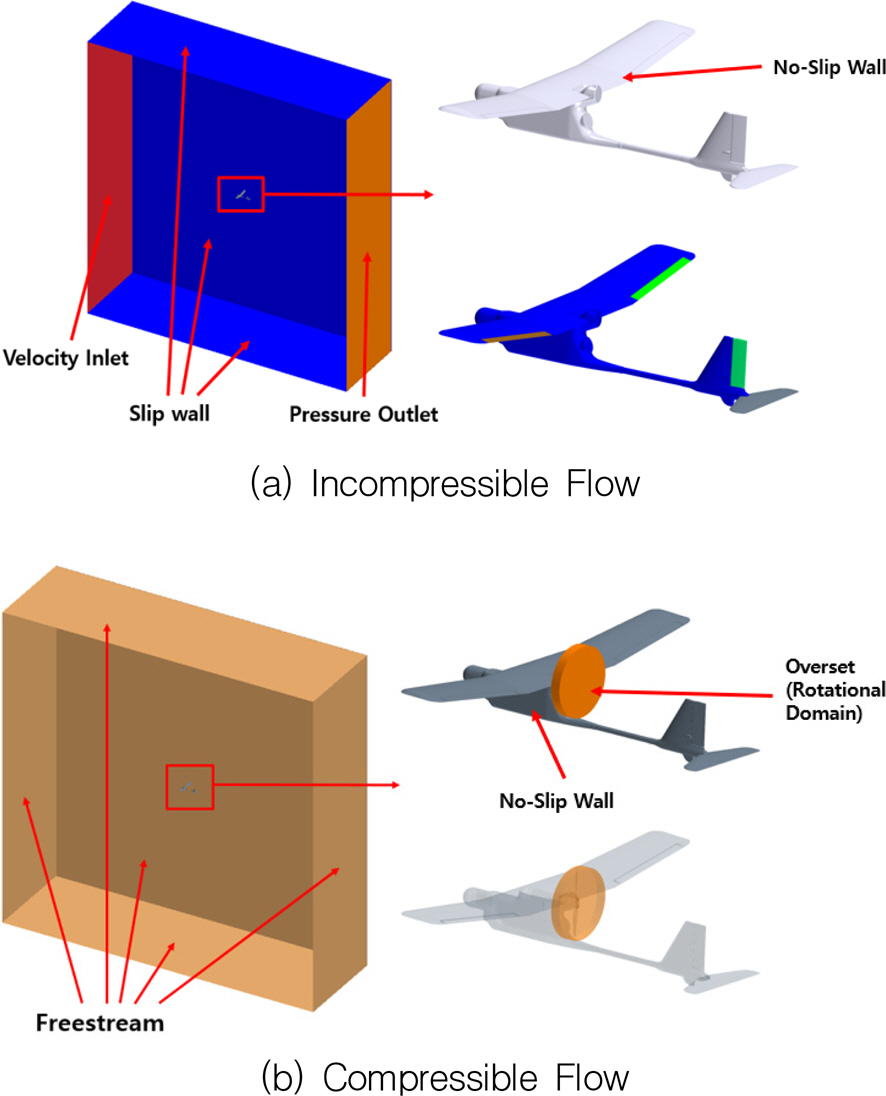
CFD boundary conditions for the UAV model without propeller
Fig. 6은 전기체 무인기 형상에 대해 회전 프로펠러 후류 간섭 효과 및 러더 회전각을 고려한 유동해석을 수행하기 위해 생성한 격자를 보여주고 있다. 원방경계(far-field boundary) 거리는 프로펠러 후류 간섭 효과를 고려하지 않은 경우와 동일하게 설정하였다. 고속으로 회전하는 프로펠러 후류 영역에 대해서는 보다 조밀하게 격자를 재생성하였다. 항공기 표면에서 경계층 격자는 프로펠러를 고려하지 않은 경우와 유사하며, 프로펠러 표면의 경우 격자가 더욱 조밀하게 분포되어 있어서 경계층 두께를 동체에 비해 더 얇게 설정하여 y+가 1 이하가 되도록 조절하였다. 또한 러더 회전각변화를 고려하여 격자를 재생성할 수 있도록 독립된 유동격자 영역을 설정하였다.
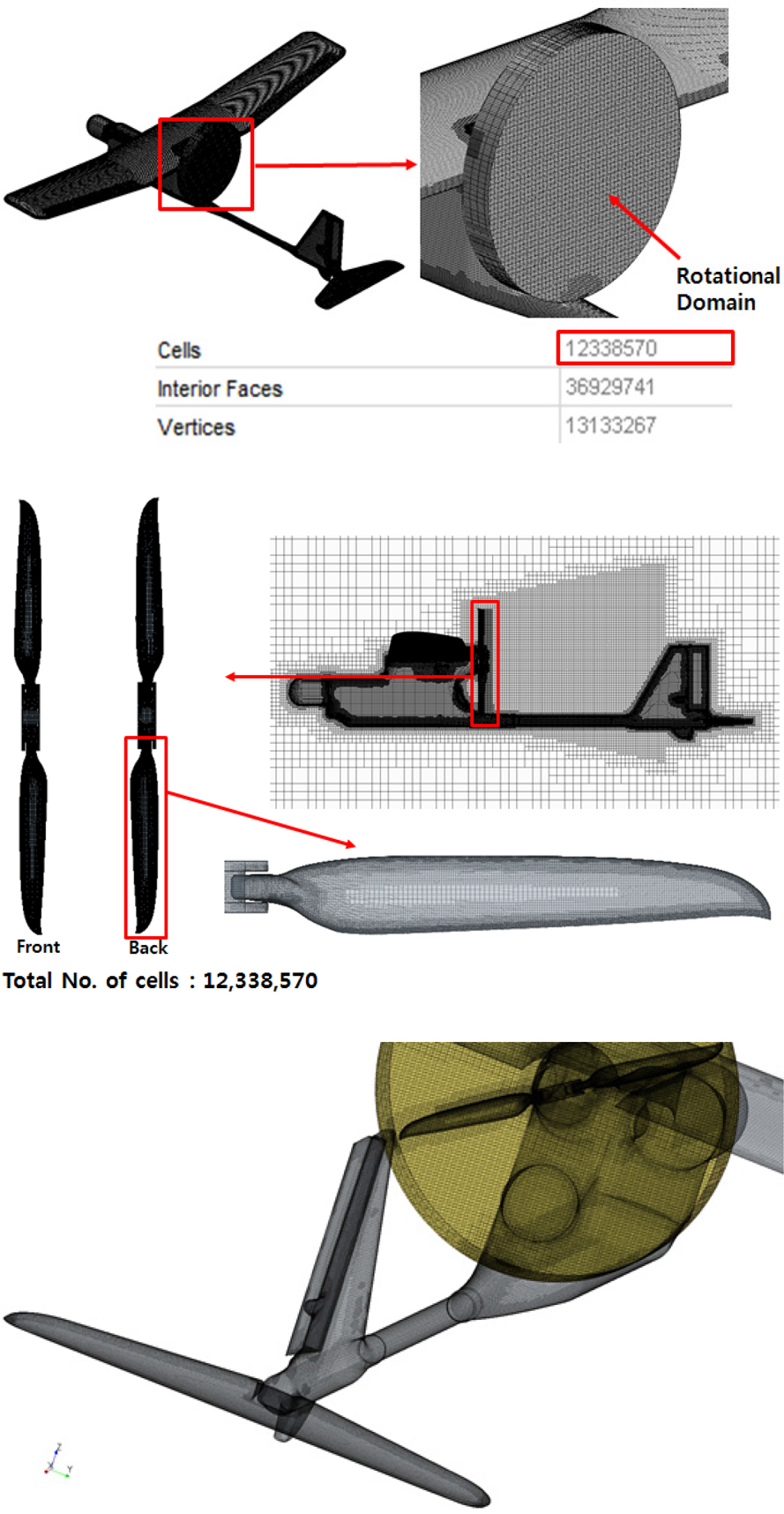
CFD mesh for the UAV model with a rotating propeller(Total cells = 12,338,570)
유동해석 조건은 해수면 대기압력 101,325 Pa 및 대기밀도 1.225 kg/m3을 적용하였다. 운항속도는 80 km/h 이고, 초기 받음각은 0°를 설정하였으며, 러더(rudder) 각도 변화에 대한 요잉 모멘트 특성은 이후 결과에 제시하였다.
2.3 수치해법
프로펠러 후류의 수직미익 공력간섭 효과를 분석하기 위한 CFD 해석을 위하여 상용 CFD 코드인 STAR- CCM+ 14.02를 사용하였다.
프로펠러 회전운동을 실제로 반영하기 위해 비정상(unsteady) 유동해석을 수행하였다. 유동해석에서 난류 모델은 RANS(Reynolds Averaged Navier-Stokes) 기반으로서 역압력구배에 의한 경계층의 유동 지연(retardation)이나 박리 현상에 대한 예측에 우수한 결과를 얻을 수 있는 SST k-ω 난류 모델(Shear Stress Transport k-ω model)을 적용하였다. 공간 차분을 위해서 유한 체적법(finite volume method)[7]를 사용하였으며, Coupled flow solver를 적용하였다. 비정상(unsteady) 유동해석을 위해 수치적으로 안정한 내재적(implicit) 시간 적분법을 이용하였다. 또한 가상 시간인 pseudo time 개념을 이용하여 하나의 시간 전진에 내부 iteration을 계산하는 이중 시간 전진법(dual time stepping)을 이용하여 선형화에 따른 오차를 줄였다. 시간 스탭은 프로펠러 후류 간섭 효과를 고려하지 않는 해석은 1.0×10-3 sec으로 설정하였고, 시간 전진 수렴성 향상을 위해 sub-iteration은 10회를 설정하였다. 프로펠러 후류 간섭 효과를 고려한 해석은 시간 스텝을 프로펠러 회전속도 9,000 rpm을 기준으로 2 deg/iteration에 해당하는 3.722×10-5 sec로 설정하였고, sub-iteration은 동일하게 10회로 설정하였다.
수치해석에 사용된 서버는 Intel Xeon CPU E5-2687W v2 3.40 GHz(20 core), 128 GB, 4TB HDD의 하드웨어 사양을 가지는 병렬컴퓨팅 서버로 프로펠러를 고려하지 않았을 때 비정상상태 유동해석은 20 core 병렬연산으로 약 46시간(약 2일)이 소요되었다. 프로펠러 후류 간섭 효과를 고려한 경우 한 개 조건의 비정상 유동해석에 소요된 수치해석 시간은 20 core 병렬연산으로 약 300 시간(약 12 일)이 소요되었다.
3. 해석결과 및 검토
3.1 회전 프로펠러를 제외한 경우 전기체 유동해석
Fig. 7은 프로펠러 후류 간섭 효과를 고려하지 않은 경우 무인기 주변의 속도 및 압력 분포도를 보여주고 있다. Fig. 8은 동일 조건에서 항력(Fx), 양력(Fz), 롤링 모멘트(Rolling Moment, Mx) 및 요잉 모멘트(Yawing Moment, Mz)의 수렴 선도를 나타내고 있다. 공력하중 인 양력 및 항력은 일정하게 수렴하였으나, 공력 모멘트의 경우는 동체 후류가 수평 및 수직미익에 미치는 영향으로 인해 미소한 크기로 진동하는 특성을 나타내었다. 유동장의 측면 및 상하면의 경계조건 효과를 보기 위해 함께 제시된 symmetry B.C. 결과 또한 유사한 특성을 나타내었다.

Velocity and pressure contours for the UAV model without propeller(V = 80 km/h, h = 0 ft)

Convergence histories for the aerodynamic force and moments with respect to time(V = 80 km/h, h = 0 ft)
3.2 회전 프로펠러 후류를 고려한 전기체 유동해석
Fig. 9는 회전하는 프로펠러 후류(wake) 간섭 효과를 고려한 전기체 비정상 유동해석 결과로 회전하는 프로펠러에서 발생한 wake vortex가 시간에 따라 후류 방향으로 퍼져 나가는 모습을 확인할 수 있다. 이러한 동적 후류 간섭 효과로 인해 수직 및 수평미익의 압력분포가 영향을 받게 되고 생성되는 공력하중도 영향을 받게 된다.

Downstream wake vortex contour for the UAV model with rotating propeller(V = 80 km/h, h = 0 ft, ω = 9,000 rpm)
Fig. 10은 시간에 대한 무인기의 비정상 공력 하중 및 모멘트 응답을 나타내고 있다. Fig. 10(a)에서 총 양력(수직력)의 경우는 0.2초 이후부터 수렴되는 경향을 보였다. 전기체 항력 성분인 Fx는 평균값이 거의 0으로 프로펠러가 발생시키는 추력과 평형상태가 유지되고 있음을 나타내고 있다. Fz는 평균 약 46 N으로 프로펠러 후류 간섭 효과를 무시한 해석결과와 비교하여 약 6 %의 차이를 나타내었다.

Unsteady aerodynamic forces and moments with respect to time(V = 80 km/h, h = 0 ft)
Fig. 10(b)에서는 프로펠러 후류와 수평미익의 간섭효과에 기인하여 롤링 모멘트가 미소하게 진동하는 특성이 나타나게 됨을 확인할 수 있다. Fig. 10(c)에서는 생성된 프로펠러 후류가 수직미익을 완전히 통과하는 데는 약 0.03 sec 정도 소요됨을 확인할 수 있다. 또한, 프로펠러 후류와 수직미익의 간섭효과로 인해 무인기 기수를 우측으로 회전시키는 요잉 모멘트가 지속해서 유발됨을 확인할 수 있다. 사유는 시계방향으로 회전하는 프로펠러에서 발생된 회전후류(swirl wake)가 수직미익을 통과하면서 수직미익 좌우에 압력차를 유발하기 때문이다. 참고로 이러한 현상은 해당 무인기의 실전 운용에서도 경험되었던 사항이다. Pusher 타입 프로펠러 무인기의 경우 이러한 후류 간섭 효과 때문에 직선 수평비행 구현을 위한 적절한 러더각 설정이 비행속도에 따라 다르게 제어기에 반영되어야 한다. 일반적으로 이러한 요잉 모멘트를 상쇄시키는 적절한 러더각 설정을 위해 다수의 시행착오적 비행시험 과정이 요구되게 된다. 이러한 과정에서 본 논문과 같이 매우 정교한 전기체 무인기 CFD 모델에 대한 유동해석 결과는 유용한 관련 데이터를 제공할 수 있다.
Fig. 11은 전기체 무인기 형상에서 프로펠러를 고려하지 않은 경우와 고려한 경우에 대해 두 가지 대표 비행속도에서 러더 회전각 변화에 따른 요잉모멘트 계수(yawing moment coefficient, Cy) 비교 결과를 보여주고 있다. 요잉모멘트 계수를 무차원화하기 위한 매개변수 값은 Table 1에 정리하였다. Fig. 11(a)는 비행속도 55 km/h에서 프로펠러 회전속도 5,000 rpm인 경우이며, 프로펠러 후류 간섭 효과를 고려하지 않은 경우는 러더각 0°에서 요잉모멘트 계수가 0이나, 앞서 언급한 바와 같이 프로펠러 후류 간섭 효과가 고려된 경우는 −0.001 정도로 음의 값을 나타내고 있다. 물리적인 값으로는 러더 회전각이 0°일 때 요잉 모멘트가 평균 −0.25 Nm, 2.5°일 때 0.04 Nm, 5°일 때 0.29 Nm 로 계산되었다. 이 경우 프로펠러 후류 간섭 효과로 발생 되는 요잉모멘트를 상쇄시키는데 필요한 러더 회전각은 약 2.2°이다.
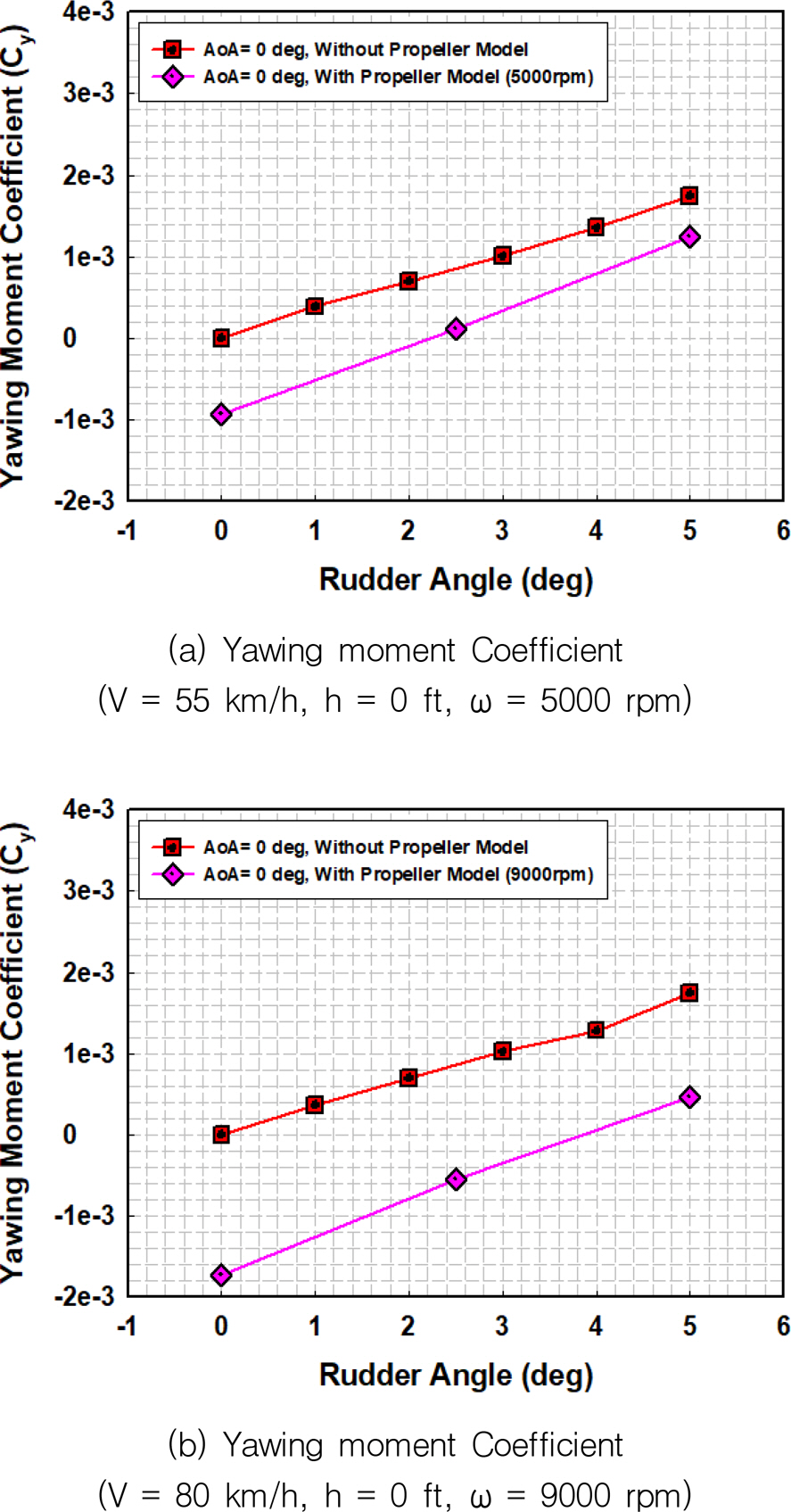
Computed yawing moment coefficients for different flight speeds and rudder rotation angles
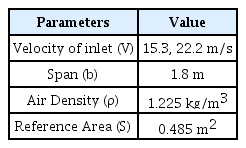
Variable for calculating Cy
Fig. 11(b)는 최대 순항속도 80 km/h에서 프로펠러 회전속도 9,000 rpm인 경우이다. 프로펠러 후류 간섭 효과를 고려한 경우 러더 회전각이 0°일 때 평균 −0.92 Nm, 2.5°일 때 −0.43 Nm, 5°일 때 0.24 Nm로 계산되었다. 이를 요잉 모멘트 계수로 환산한 결과는 그래프에 제시되어 있다. 이 경우는 프로펠러 후류 간섭 효과로 발생 되는 요잉모멘트를 상쇄시키는데 필요한 러더 회전각이 약 4°로 55 km/h(ω = 5,000 rpm) 비행조건의 경우보다 증가 되었다. 프로펠러 후류 간섭 효과를 고려하지 않은 경우는 55 km/h 및 80 km/h의 비행속도에서 러더각 변화에 따른 요잉모멘트 계수가 동일하나 프로펠러 후류 간섭 효과를 고려한 경우는 동일하지 않은 것으로 나타났다. 이 결과는 pusher 타 입 프로펠러를 가지는 소형 무인기를 설계할 때 특히 방향안정성 관점에서는 프로펠러 후류 간섭 효과를 고려하는 것이 중요하다는 것을 시사하고 있다.
4. 결 론
본 논문에서는 투척식 소형 무인기의 pusher 타입 프로펠러 후류 간섭 효과를 고려한 3차원 CFD 유동해석을 통해 유발되는 요잉모멘트를 예측하고 특성을 분석하였다. 프로펠러 후류 간섭 효과를 고려하지 않은 경우는 일반적인 비행역학 결과처럼 비행속도에 상관 없이 동일한 요잉모멘트 계수가 예측되었다. 하지만 프로펠러 후류 간섭 효과를 고려한 경우는 무인기의 운항속도 및 프로펠러 회전속도에 따라 요잉모멘트 계수가 달라짐을 파악할 수 있었다. 또한 본 연구를 통하여 무인기 순항속도 영역에서 프로펠러 후류 간섭 효과에 따라 유발되는 요잉모멘트를 상쇄시킬 수 있는 러더 회전각을 예측하였고 관련 특성을 분석하였다.
후 기
본 연구는 2019년 국방기술품질원 연구과제(과제명: 전산유체해석을 통한 소형무인기 공력특성 분석)로 수행된 결과의 일부이며, 지원에 감사를 표하는 바입니다.