해상표적의 변침과 대함유도탄의 중기유도 오차분석 연구
Error Analysis Study on the Veering of Marine Target and the Midcourse Guidance of Anti-ship Missile
Article information
Abstract
This paper presents the results of new error analysis on the veering of marine target with the concept of frequency of occurrence, and shows how to apply the midcourse guidance errors of anti-ship missile. The veering error would be a dominant factor in the midcourse guidance errors with flight time increase. This study suggests the reasonable application method of the veering error based on the characteristics of abnormal error, and describes the tailoring method including trade-off between the midcourse guidance range of veering target and the value of frequency of occurrence on veering error.
1. 서 론
해상 표적을 목표로 하는 근거리 대함 유도탄의 설계에 있어, 여러 중기유도 오차 요소 중 변침오차가 비행시간의 증가에 따라 크게 대두된다. 본 연구에서는 해상표적의 변침량, 변침시간 및 진입각에 따른 변침오차를 발생빈도 개념으로 새롭게 분석하였다. 발생빈도 개념은 온도 등을 포함한 기후 분석에 활용되는 개념으로[1,2], 본 연구를 통해 해상표적의 변침 및 중기유도 오차 분석에 발생빈도 개념의 적절한 적용 예를 제시하고자 한다. 참고로 해상표적의 변침이나 기동표적의 오차 분석연구는 표적 추적이나 거리 추정을 위한 필터설계 목적으로의 연구가 일부 수행되어졌고, 본 연구의 유도탄 중기유도 등의 목적으로 한 오차분석 관련 사전연구 예는 상당히 제한적이었다.
레이더 오차 등의 항시 존재하는 상시(normal) 오차 대비 변침 오차는 경우에 따라 발생할 수도, 안할 수도 있는 비상시(abnormal) 오차로, 이러한 오차에 대해 상시 오차 수준의 오차 발생빈도값을 설계 등에 적용하 는 것 보다는 비상시 오차 특성을 반영한 차별화한 발생빈도값을 적용함으로서 체계 설계 및 운용 등의 효율성을 높일 수 있다. 이러한 접근은 최근 강조되는 설계 및 시험평가 등에서의 테일러링(tailoring) 활동으로, 이러한 테일러링을 통해 설계 유연성을 확보할 수 있을 뿐만 아니라, 운용 효율성 등의 확보를 통해 비용 절감 및 수요 확대를 기할 수 있을 것으로 판단된다.
2. 용어정의
표준편차(σ) 발생빈도(standard deviation frequency of occurrence)[1] – 임의의 분포 특성을 표준정규분포로 가정하고, 특정 절대값 이하 발생 빈도가 해당 표준편차의 누적빈도(해당 면적)에 상응 시 해당 표준편차 발생빈도로 정의한다.
백분율(%) 발생빈도(percentage frequency of occurrence)
– 임의의 분포 특성을 표준정규분포로 가정하고, 특정 절대값 이하 발생 빈도가 해당 백분율의 누적빈도(해당 면적)에 상응 시 해당 백분율 발생빈도로 정의한다. 참고로 온도 등에서의 발생빈도는 누적빈도가 아닌 초과빈도로 정의하여[2] 쓰기도 하나 맥락은 근사하다.
상시 오차(normal error) – 항법오차나 레이더오차 등과 같이 항상 존재하는 오차를 지칭한다.비상시 오차(abnormal error) – 해상 표적의 변침오차 등과 같이 경우에 따라 존재할 수도, 안할 수도 있는 오차를 지칭한다.
테일러링(tailoring) – 설계 주요 요소, 허용오차 및 시험 환경과 조건 등을 선택하고, 그리고 경우에 따라 주요 설계 및 시험값 등을 변경하는 과정으로, 현실적 기후 조건 및 실제 환경조건 등을 반영한 연구개발 및 시험평가 업무의 준비 및 개정 등도 포함한[3] 최적화 활동으로 절충(trade-off) 연구 등을 포함한다.
절충(trade-off) – 상충되는 두 목표 간의 타협으로, 임의의 제품에 있어서 성능 대 가격, 유도탄의 사거리 대 탄두 무게 등의 타협 등이 해당된다.
3. 변침 분석
3.1 분석 방법
본 연구에서는 Fig. 1의 -y축 기준 변침에 따른 횡방향(x축) 오차에 관점을 두고 분석을 수행하였다. 이 는 유도탄 발사 전 레이더 특성 및 비행 중 탐색기의 표적 탐지 특성 등을 고려한 결과이다. Fig. 1의 좌표 원점은 유도탄 발사 전 표적 정보의 위치이며, 진입각은 기준좌표계 -y축과 발사 전 표적의 속도벡터 간의 각도에 해당된다. 예상과 달리 발사 후 표적의 변침이 존재하면 중기유도 종료 시점에서 표적의 예상위치와 실제 위치간의 차이가 발생하게 되며, 이 차이가 곧 변침에 따른 오차에 해당된다.
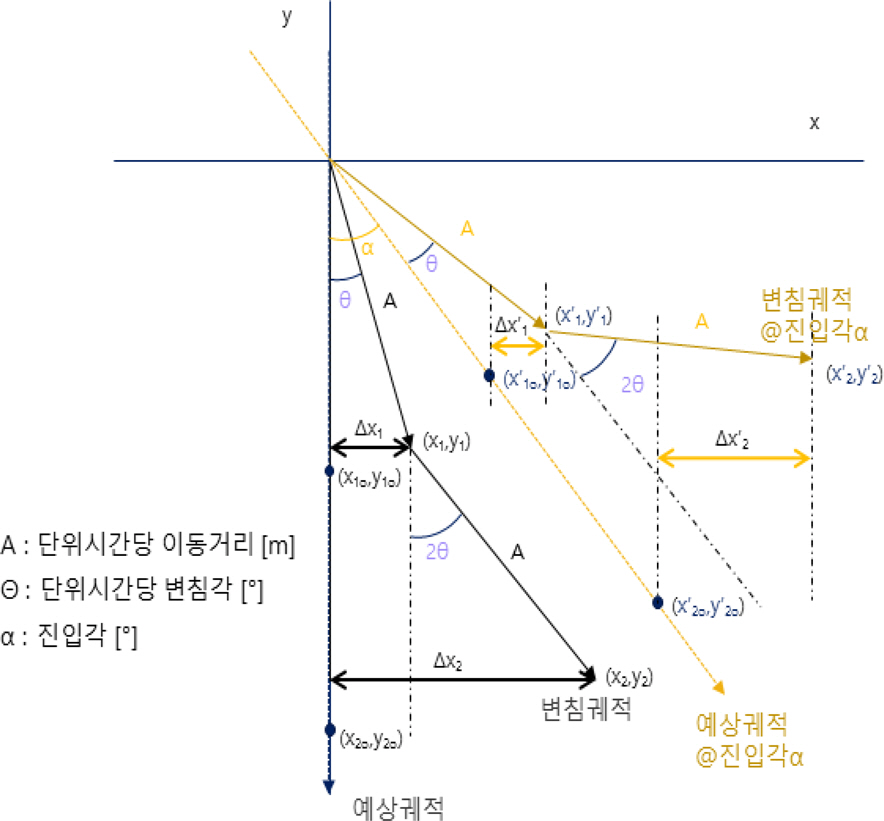
Veering error geometry
해당 표적이 진입각(α) 0°로 진입 중 좌표 원점을 지나면서 단위시간당 θ각의 우측 변침을 가정하면, 변침에 따른 임의 시간에서의 표적 좌표는 식 (1)로 나타낼 수 있으며, 해당시간에서의 횡방향 변침오차(∆xk)는 진입각이 0°임에 따라 xk자체가 오차에 해당된다.
표적이 진입각 α로 이동간에 좌표 원점을 지나면서 변침에 따른 임의 시간에서의 표적 좌표는 식 (1)의 결과에 대한 진입각 α를 적용한 식 (2)의 좌표 변환으로 나타낼 수 있으며, 해당시간에서의 변침오차는 식 (3)으로 계산된다. 이는 변침에 따른 해당 횡방향 값(
본 변침오차 계산에는 국내 및 해외 공기부양정의 운용 조건 등을 참고하여 속도 40 knots에서 변침 각속도 2°/sec 및 3°/sec 조건을 적용하였고, 진입각 0°에서부터 5°단위로 90°까지 분석하였으며, 변침 방향에 있어서도 좌, 우 두 방향을 적용하였다. 변침오차 발생빈도 계산을 위한 단위시간은 0.1초를 기준하여 해당시간까지의 발생빈도를 종합하여 처리하였으며, 기준 축 270° 기준의 진입각 –90°∼0° 분석은 0°∼90° 분석의 쌍대개념을 적용하여 변침오차 발생빈도의 분포 특성에 반영하였다.
3.2 분석 결과
변침 조건 좌, 우 2°/sec 변침에 따른 x축 궤적 및 변침오차를 가독성 고려 15° 간격의 결과만을 Fig. 2∼5에, 변침 조건 좌, 우 3°/sec 변침에 따른 x축 궤적 및 변침오차 결과를 Fig. 8∼11에 나타냈다. 진입각 0°에서는 x축 궤적이 곧 변침오차에 해당됨을 볼 수 있으며, 이때 시간이 경과하면서 변침오차 상에 변곡점이 생기는 현상은 시간에 따른 변침 누적 각 90°를 넘어서면서 오차의 기울기가 변하는데 기인하며, 변침 누적 각 180°를 초과하면 오차는 감소하게 되어 360°에 이르면 다시 0이 된다. 이는 변침조건 3°/sec 결과인 Fig. 8∼11을 통해 더 빠른 변침 오차변화 특성을 추가 확인할 수 있다.
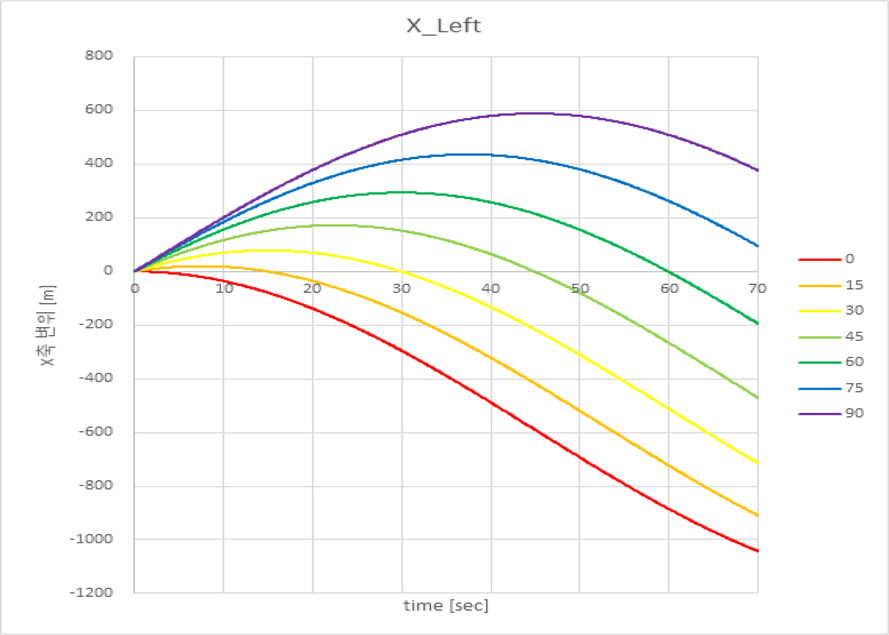
X axis trajectories of left veering angular rate 2°/sec with entry angle
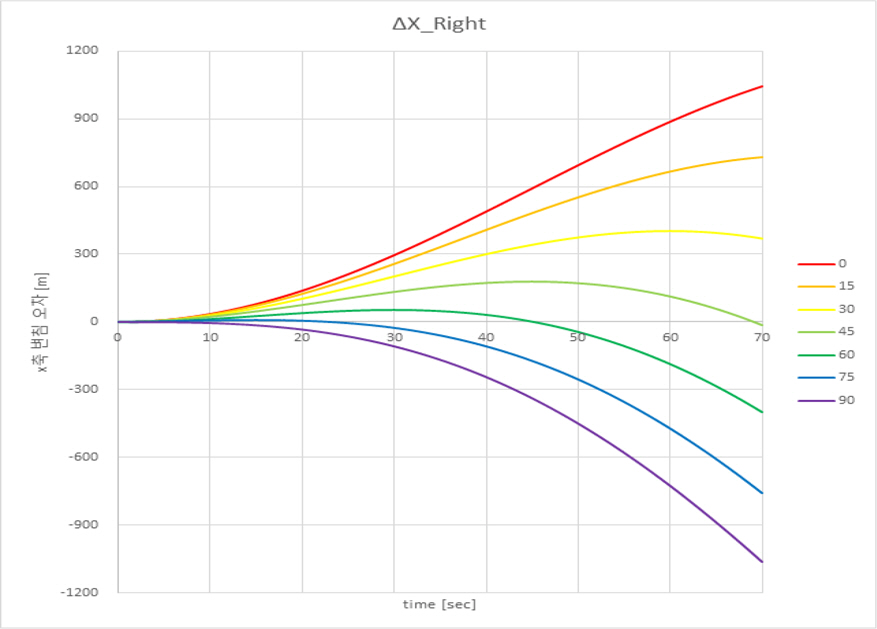
X axis errors of right veering angular rate 2°/sec with entry angle
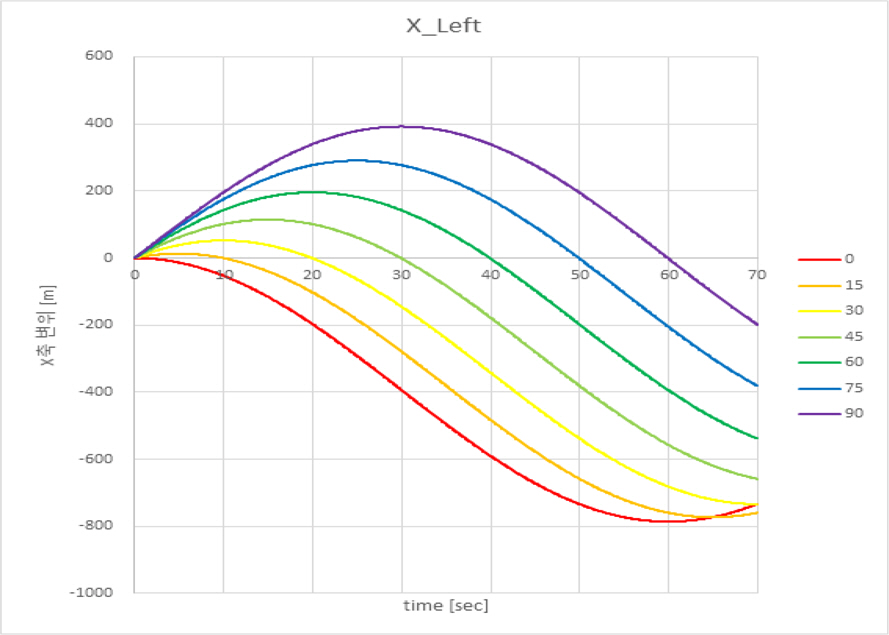
X axis trajectories of left veering angular rate 3°/sec with entry angle

X axis errors of right veering angular rate 3°/sec with entry angle

X axis trajectories of right veering angular rate 2°/sec with entry angle
임의의 진입각에서의 변침은 변침방향에 따라 오차가 상대적으로 상이함을 Fig. 4, 5 및 10, 11을 통해 볼 수 있으며, 해당 그림에서 좌, 우 변침의 오차간의 차이는 진입각 0°∼90° 영역인 4사분면 분석에 따른 것으로, 진입각 –90°∼0° 영역의 3사분면 포함 시 좌, 우 변침 오차간의 차는 서로 쌍대가 되어 상쇄됨을 Fig. 6 및 12의 변침오차 발생빈도의 분포 특성을 통해 확인할 수 있다. Fig. 6 및 12의 그래프 상 주기적 특이 빈도는 5°단위 분석에 따른 것으로 무한히 분석 단위를 나누게 되면 제거될 내용이다. 변침오차 발생 분포에서 상대적으로 0 근처에 높은 빈도값을 가지며, 변침각이 커지면 더 넓은 오차 분포를 나타내며, 오차 값이 커져도 상대적으로 낮은 빈도의 넓은 분포 특성 을 유지함을 변침오차 발생 분포 그림을 통해 또한 볼 수 있다.
X axis errors of left veering angular rate 2°/sec with entry angle

X axis errors of left veering angular rate 3°/sec with entry angle

Distribution of veering error at veering angular rate 2°/sec on the frequency of occurrence

Distribution of veering error at veering angular rate 3°/sec on the frequency of occurrence
변침오차 발생빈도의 시간에 따른 추세를 Fig. 7 및 13에 나타냈으며, 시간에 따른 변침 오차값의 증가가 변침량 및 발생빈도값이 높아짐에 따라 상대적으로 더욱 커짐을 볼 수 있다. 이 그림들을 통해 비행시간 증가 시 변침오차 발생빈도값을 어떻게 선정하는가에 따라 중기유도 오차 해석 및 설계에 많은 영향을 미침을 볼 수 있다.

Trend of veering errors at veering angular rate 2°/sec on the frequency of occurrence

Trend of veering errors at veering angular rate 3°/sec on the frequency of occurrence

X axis trajectories of right veering angular rate 3°/sec with entry angle
Table 1에 진입각 0°∼90° 영역인 4사분면에서의 속도 40 knots 진입 시, 진입각 5° 단위, 좌우 변침 각속도 2°/sec에 따른 변침오차 분석결과를 백분율 및 표준편차 발생빈도값 등을 포함하여 나타냈으며, 좌우 변침 각속도 3°/sec에 따른 변침오차 분석결과를 Table 2에 나타냈다. 그리고 발생빈도 계산을 위한 변침 조건 및 변침 시간에 따른 총 발생빈도 개수도 Table 1, 2에 함께 제시하였으며, 단위시간당 변침량 증가에 따라 변침 오차가 증가함을 볼 수 있다.

Analysis of veering error at veering angular rate 2°/sec on the frequency of occurrence

Analysis of veering error at veering angular rate 3°/sec on the frequency of occurrence
본 분석기법을 활용하여 임의의 속도 및 변침 조건에 따른 변침 오차분석을 통해 체계 설계나 시험 평가 등에서의 활용이 가능하며, 최근 강조되는 테일러링에 본 분석결과를 적용하여 체계 효율화를 기할 수 있다.
4. 중기유도 오차 분석
4.1 중기유도 오차 요소 및 분석
대함 유도탄의 중기유도의 오차요소에는 항법오차, 레이더의 방위오차 및 속도오차, 그리고 탐색레이더의 타임택(time tag) 부재에 따른 타임택 오차 등이 상시오차로 작용하며, 본 연구의 주관점인 변침오차가 비상시 오차로 작용한다.
중기유도 오차분석은 다음의 순서로 수행하였다. 항법오차, 레이더오차 등의 상시오차들은 서로 독립적이라 가정하고, 해당 표준편차(σ)들의 RSS(Root Sum Square)에 σ 기준의 설계 허용계수(z)를 선정한다. 설계 허용계수(z) 값은 설계 허용오차 99.7 %에서 3, 95.4 %에서 2, 68.3 %에서 1 값을 갖는다. 비상시 오차인 변침오차에 대해서도 적절한 설계 빈도값을 선정하며, 이 오차 또한 상시오차들과 독립적이라는 가정 하에, 이 두 오차를 다시 RSS 처리한 오차합을 식 (4)를 이용하여 구한다.
비상시 오차에 상시오차와 같이 σ 기준의 설계 허용계수(z)를 적용하지 않는 이유는 Fig. 6 및 12의 변침오차 발생분포 특성상 정규분포 특성을 갖지 않음을 고려한 결과이다. 오차합 식 (4)의 RSS 처리는 표준편차 기반으로 계산된 상시오차 RSS값과 시뮬레이션 기반으로 얻어진 변침오차 제곱값에 각각 가중치를 부여하여 처리한 결과이다.
식 (4)의 결과를 유도탄 중기유도 구속조건인 탐색기 시야각 고려한 종말 횡방향 설계거리 구속조건(C lim)과 비교하는 중기유도 오차 마진분석을 식 (5)에 나타냈다.
emgn: 오차마진
Clim: 구속조건
4.2 중기유도 오차 분석 결과
본 분석에서 비행시간은 사거리와 속도의 관계로 단순화 하였고, 항법오차는 고정밀 주(master) 관성항법장치를 활용한 전달정렬 기법[4]을 적용한 관성측정기(Honeywell_HG1700SG90)의 몬테카를로 시뮬레이션 결과를 반영하였으며, 지상의 사격통제 레이더 관련 횡방향 오차는 펄스도플러 레이더(FLIR_R20SS)의 규격을, 그리고 레이더의 속도오차는 제조사의 시험자료 등을 고려한 가정치를 적용하였다.
체계성능은 표적 타격확률로 임의의 값을 갖는 체계를 가정하여 상시오차는 2σ 빈도값을, 비상시오차는 변침 조건 2°/sec에서의 비상시 오차 특성을 고려한 1σ 빈도값을 분석에 반영하였다. 표적속도 및 유도탄속도, 그리고 중기유도 구속조건 등은 임의의 체계 조건을 가정하여 분석 조건을 설정하였다. 이상의 분석조건을 가정치를 포함하여 Table 3에 나타냈다.

Analysis condition ofmidcourse guidance (Italic: assumption)
중기유도 오차 분석의 식 (4)를 적용한 분석결과를 Table 4에, 그리고 구속조건을 포함한 결과를 Fig. 14에 제시하였다. 분석조건 상 상시오차 2σ를 적용함에 따라 식 (4)의 z값은 2가 되며, 레이더의 긴 갱신주기에 따른 타임택 오차(et)는 본 분석에 적용된 레이더의 갱신주기 규격 1초에 따라 무시하였다. 이러한 조건 등을 반영하여 분석한 결과, 사거리에 따른 비행시간이 길어질 경우 항법 및 레이더 오차 증가 대비 변침오차가 상대적으로 크게 증가함에 따라, 중기유도 사거리 17 km 이상에서는 표적정보 갱신을 위한 업링크(up-link) 필요성이 제기된다. 이러한 업링크 적용의 임계 중기유도 사거리는 비상시오차 1σ 빈도값 적용 시 약 17 km로 분석되었으며, 업링크 적용 시 변침오차 및 레이더 속도오차는 상대적으로 무시할 수준으로 작아져 Table 3의 중기유도 구속조건 하에서 20 km 이상에서도 중기유도 오차 마진을 확보할 것으로 분석된다.

Error analysis of midcourse guidance
Error analysis and constraint limit of midcourse guidance
4.3 업링크 적용 유무 테일러링 연구
본 분석을 통해 변침오차가 비행시간 증가에 따라 중기유도의 주요 오차요소로 작용함을 확인하였다. 이러한 변침오차를 어떻게 선택하는가에 따라 유도탄 발사 후 표적정보 갱신을 위한 업링크 적용 유무를 포함한 체계 설계 및 운용에 큰 차이를 갖게 된다.
체계 설계의 업링크 적용 유무 관점에서, 표적의 변침오차와 중기유도 사거리간의 절충연구를 수행하였다. Fig. 7 및 Table 1의 좌우 변침 각속도 2°/sec에서의 시간에 따른 변침오차 발생빈도값에 상시오차 2σ 빈도값을 적용한 중기유도 오차합과 Table 3의 중기유도 구속조건과의 비교를 Fig. 15에 나타냈다. 이 그림에서 상시 오차 특성 대비 비상시 오차인 변침오차의 발생빈도값을 얼마로 선정하는가에 따른 업링크 적용 임계 중기유도 사거리 변화를 볼 수 있다. 이 결과를 활용하여 비상시 오차인 변침오차의 선정은 사용자와 개발자 간의 절충 연구를 통해 이루어질 수 있으며, 본 분석에서는 변침오차를 1σ 빈도값을 반영하였으나, 중기유도 사거리 기준 적절한 빈도값이나 또는 고속표적의 변침 운용 특성을 고려하여 중간 사거리 기준 상대적으로 높은 수준의 빈도값 등을 비상시 오차값으로 고려해 볼 수도 있다.

Midcourse guidance constraint limit vs error sums with veering errors
Fig. 15를 통해 중기유도 사거리 17 km 고려 시 변침오차 발생빈도 약 68.3 %인 1σ 빈도값까지 중기유도 구속조건을 만족하며, 표적의 고속에서의 변침 운용 특성을 고려 변침표적의 중기유도 사거리를 10 km 로 한정할 경우 최대 변침오차를 수용함을 볼 수 있 다. 이러한 분석을 통한 주요 설계 파라메타인 변침 표적의 중기유도 사거리와 변침오차 등의 선정 및 적용이 체계 설계과정에서의 업링크 적용 관련 절충연구로서, 체계 설계의 유연성 및 효율화 등을 고려해 상시오차 대비 비상시 오차인 변침오차의 합리적 선정과 고속 변침표적의 중기유도 사거리에 대한 차별화한 적용 등이 강조된다.
5. 결 론
본 연구에서는 변침하는 대함표적의 변침량, 변침 시간 및 진입각 등에 따른 변침오차를 발생빈도 기법으로 새롭게 분석하여 나타냈으며, 레이더 오차 등의 상시 오차 대비 경우에 따라 발생할 수도, 안할 수도 있는 비상시 오차인 이러한 변침 오차에 대한 차별화한 발생빈도값을 오차분석에 적용하는 방법도 함께 제시하였다. 그리고 근거리 대함유도탄의 중기유도 오 차분석에 합리적 변침오차를 반영하는 체계 설계 절충연구도 제시함으로서, 시스템 설계 및 시험평가 등에서의 활용을 통해 체계 설계의 유연성 및 효율화를 기할 수 있다. 이를 통해 체계 비용 절감 및 수요 확대 등을 기대할 수 있을 것으로 판단되며, 이러한 본 연구의 접근은 최근 강조되는 테일러링 연구의 일환으로, 개발 시 절충연구를 포함한 테일러링 연구에 설계 및 획득 관계자 등의 전향적 접근이 요구된다.