



м„ң лЎ
лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҖ 비н–үм ңм–ҙм»ҙн“Ён„°мқҳ мһ…л ҘмңјлЎң мҡ”кө¬лҗҳлҠ” н•ӯкіөкё°мқҳ мҶҚлҸ„, кі лҸ„, л°ӣмқҢк°Ғ, мҳҶлҜёлҒ„лҹјк°Ғ л“ұмқҳ лҢҖкё°мһҗлЈҢ мғҒнғңм •ліҙлҘј м ңкіөн•ҳлҠ” мһҘ비мқҙлӢӨ. л¬ҙмқён•ӯкіөкё°мқҳ 비н–үм ңм–ҙм»ҙн“Ён„° лӮҙл¶Җ м ңм–ҙлІ•м№ҷмқҖ лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң м¶ңл Ҙ м •ліҙлҘј нҶөн•ҙ кі лҸ„ л°Ҹ мҶҚлҸ„ лӘ…л №мқ„ 추종н•ҳкі кі л°ӣмқҢк°ҒмқҙлӮҳ кіјмҶҚ мғҒнғңлҘј л°©м§Җн•ҳкё° мң„н•ң 비н–үмҳҒм—ӯ ліҙнҳё лЎңм§Ғмқ„ лҸҷмһ‘мӢңнӮЁлӢӨ. л•Ңл¬ём—җ лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң кі мһҘмқҙ л°ңмғқн•ҳлҠ” кІҪмҡ° 비н–ү н•„мҲҳ кё°лҠҘмқ„ м •мғҒм ҒмңјлЎң мң м§Җн•ҳлҠ” кІғмқҙ л¶Ҳк°ҖлҠҘн•ҳл©°, кі мһҘмқҳ мң нҳ•кіј мӢ¬к°ҒлҸ„м—җ л”°лқј н•ӯкіөкё°мқҳ м№ҳлӘ…м Ғмқё мҶҗмӢӨлЎң мқҙм–ҙм§Ҳ мҲҳ мһҲлӢӨ. нҠ№нһҲ лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ мёЎм •л¶ҖлҠ” лҸҷмІҙ мҷёл¶Җм—җ мһҘм°©лҗҳм–ҙ м°©л№ҷ нҷҳкІҪмқҙлӮҳ мЎ°лҘҳ 충лҸҢкіј к°ҷмқҖ мҷёл¶Җ мҡ”мқём—җ л…ём¶ңлҗҳлҜҖлЎң мҡҙмҡ© мӨ‘ кі мһҘм—җ л”°лҘё мң„н—ҳм„ұмқ„ н•ӯмғҒ лӮҙнҸ¬н•ҳкі мһҲлӢӨ. лҳҗн•ң л¬ҙмқён•ӯкіөкё°м—җм„ңлҠ” мң мқён•ӯкіөкё°мқҳ кІҪмҡ°мІҳлҹј мҡҙмҡ© мғҒнҷ©мқ„ л°ҳмҳҒн•ң мЎ°мў…мӮ¬мқҳ м§ҒкҙҖм Ғмқё нҢҗлӢЁкіј 비мғҒ мғҒнҷ© мЎ°м№ҳлҘј м Ғмҡ©н• мҲҳ м—ҶлӢӨлҠ” м ңн•ңмқ„ к°–лҠ”лӢӨ. мқҙмІҳлҹј лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ кі мһҘмқҖ л¬ҙмқён•ӯкіөкё° 비н–ү н•„мҲҳ кё°лҠҘмқҳ л¶ҲлҠҘмқ„ м•јкё°н• мҲҳ мһҲкё° л•Ңл¬ём—җ мӢ лў°м„ұ лҶ’мқҖ лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқ„ кө¬м¶•н•ҳлҠ” кІғмқҖ л¬ҙмқён•ӯкіөкё° к°ңл°ң кіјм •м—җм„ң н•„мҲҳм Ғмқё мҡ”мҶҢмқҙлӢӨ.
л¬ҙмқён•ӯкіөкё° лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң к°ңл°ңмқ„ м„Өкі„ л°Ҹ нҶөн•©мңјлЎң кө¬л¶„н•ҙліҙл©ҙ, м„Өкі„ лӢЁкі„лҠ” лҢҖмғҒ н•ӯкіөкё°мқҳ мҡҙмҡ© лІ”мң„мҷҖ лӘ©м Ғм—җ л¶Җн•©н•ҳлҠ” м„ұлҠҘк·ңкІ©мқҳ кө¬м„ұн’Ҳмқ„ м„ м •н•ҳлҠ” кІғл¶Җн„° мӢңмһ‘н•ҳм—¬ мІҙкі„ м•Ҳм „мҡ”кө¬лҸ„лҘј 충мЎұн•ҳкё° мң„н•ҙ лӢӨмӨ‘нҷ” мҲҳмӨҖмқ„ м„Өм •н•ҳкі мҡҙмҡ©л°©м•Ҳмқ„ мҲҳлҰҪн•ҳлҠ” кіјм •мңјлЎң л§Ҳл¬ҙлҰ¬ лҗңлӢӨ. лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң лӢӨмӨ‘нҷ” мҲҳмӨҖмқҖ мҶҗмӢӨм—җ л”°лҘё мІҙкі„ м•Ҳм „ мҳҒн–Ҙм„ұкіј кө¬м„ұн’Ҳмқҳ кі мһҘлҘ мқ„ кі л Өн•ҳм—¬ м„Өкі„н•ҳл©°, мҡ”кө¬лҗҳлҠ” мҲҳлҹүл§ҢнҒј лҸ…лҰҪм Ғмқё м„јм„ңлҘј кө¬м„ұн•ҳм—¬ лҸҷмқјн•ң мӢ нҳёлҘј мёЎм •н•ҳлҸ„лЎқ кө¬нҳ„н•ҳлҠ” кІғмқҙ мқјл°ҳм ҒмқҙлӢӨ[1]. лӢӨмӨ‘нҷ” кө¬мЎ°м—җм„ң м¶ңл ҘлҗҳлҠ” ліөмҲҳмқҳ мӢ нҳёлҘј мІҳлҰ¬н•ҳлҠ” л°©мӢқмқҖ н•ӯкіөм „мһҗ 분야м—җм„ң м—¬лҹ¬ кё°лІ•мқҙ м—°кө¬лҗҳм–ҙ мҷ”мңјл©°, 비н–үм ңм–ҙм»ҙн“Ён„°мҷҖ к°ҷмқҙ мӨ‘м•ҷмІҳлҰ¬кё°лҠҘмқ„ лӢҙлӢ№н•ҳлҠ” мһҘ비м—җм„ң лӮҙл¶Җ мғҒнҳёмұ„л„җ лҚ°мқҙн„°л§ҒнҒ¬(Cross Channel Data Link, CCDL)лҘј нҶөн•ҙ мһҗлЈҢлҘј кіөмң н•ҳлҠ” л°©мӢқмқ„ к·јк°„мңјлЎң н•ңлӢӨ. кё°ліём Ғмқё м ‘к·ј л°©мӢқмқҖ к°Ғ м„јм„ңмқҳ мһҗк°Җ진лӢЁкІ°кіјмҷҖ мёЎм • мӢ нҳёлҘј к°ңлі„м ҒмңјлЎң 분м„қн•ҳм—¬ кі мһҘ м—¬л¶ҖлҘј нҢҗлӢЁн•ҳкі мҡ°м„ мҲңмң„м—җ л”°лқј кҙҖлҰ¬н•ҳлҠ” л°©мӢқмқҙлӢӨ[2вҖ“7]. лӢӨлҘё м ‘к·ј л°©мӢқмңјлЎң лҸҷмқј мӢ нҳём—җ лҢҖн•ң лӢӨмӨ‘ мһ…л Ҙмқ„ мңөн•©н•ҳм—¬ мөңм Ғк°’мқ„ м¶”м •н•ҳкұ°лӮҳ ліҖлҸҷ 추мқҙлҘј н•ӯкіөкё°мқҳ лҸҷм—ӯн•ҷм Ғ нҠ№м„ұкіј 비көҗн•ҳм—¬ м„јм„ң кі мһҘмқ„ мӢқлі„н•ҳлҠ” кё°лІ•лҸ„ м Ғмҡ©лҗҳкі мһҲлӢӨ[8,9].
н•ңнҺё нҶөн•© лӢЁкі„м—җм„ңлҠ” лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң к°Ғ кө¬м„ұн’Ҳмқҳ кё°лҠҘ л°Ҹ лӮҙл¶Җ м—°лҸҷмқ„ м җкІҖн• лҝҗл§Ң м•„лӢҲлқј н•ӯкіөкё°мҷҖ м§ҖмғҒнҶөм ңмІҙкі„лҘј нҶөн•©н•ң нҳ•мғҒм—җм„ң лӘЁл“ң м „нҷҳ л°Ҹ нһҲн„° мҡҙмҡ©кіј к°ҷмқҖ кё°лҠҘмқҳ м •мғҒ лҸҷмһ‘кіј мҡҙмҡ© м Ғн•©м„ұмқ„ кІҖмҰқн•ҳкі л№„н–үмӢңн—ҳмқ„ нҶөн•ҙ лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ м¶ңл Ҙмқҙ мҡ”кө¬ м„ұлҠҘмқ„ 충мЎұн•ҳлҠ”м§Җ нҷ•мқён•ҙм•ј н•ңлӢӨ. нҶөн•©кіјм •м—җм„ң кі л Өн•ҙм•ј н• мҳӨм°ЁлҠ” лӢЁн’Ҳ мҳӨм°ЁмҷҖ мң„м№ҳ мҳӨм°ЁлЎң кө¬л¶„лҗҳлҠ”лҚ° лӢЁн’Ҳм—җм„ң л°ңмғқн•ҳлҠ” мҳӨм°ЁлҠ” м„јм„ң к°ңл°ң л°Ҹ м ңмһ‘ лӢЁкі„м—җм„ң л°ңмғқн•ҳлҠ” мҳӨм°Ёмқҙл©°, мң„м№ҳмҳӨм°ЁлҠ” мң лҸҷмқҳ мһҗмң нқҗлҰ„м—җ лҢҖн•ң н•ӯкіөкё° н‘ңл©ҙмқҳ көӯл¶Җ м••л Ҙ м°Ёмқҙм—җм„ң л°ңмғқн•ҳлҠ” мҳӨм°ЁмқҙлӢӨ[10]. лӢЁн’Ҳ мҳӨм°ЁлҠ” мҙқмЎ°лҰҪ м „нӣ„ нҷ•мқё м Ҳм°ЁлҘј нҶөн•ҙ н—Ҳмҡ©лІ”мң„лҘј лІ—м–ҙлӮҳм§Җ м•ҠлҸ„лЎқ кІҖмҰқн•ҳкі , мң„м№ҳ мҳӨм°ЁлҠ” м „мӮ°мң мІҙн•ҙм„қ л°Ҹ 비н–үмӢңн—ҳ кІ°кіј 분м„қмқ„ нҶөн•ҙм„ң ліҙмғҒн•ҳлҠ” л°©мӢқмңјлЎң мӢңмҠӨн…ңмқҳ мөңмў… м¶ңл Ҙк°’м—җ лҢҖн•ң м •нҷ•лҸ„лҘј ліҙмһҘн•ңлӢӨ[11вҖ“12]. лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң нҶөн•© мёЎл©ҙ кё°мЎҙмқҳ м—°кө¬ кІ°кіјлҠ” лӢӨмӨ‘нҷ” кө¬мЎ° м—°лҸҷмқ„ кІҖмҰқн•ҳкұ°лӮҳ мң„м№ҳ мҳӨм°ЁлҘј ліҙмғҒн•ҳкё° мң„н•ң ліҙм • кё°лІ•м—җ л§ҺмқҖ мҙҲм җмқ„ л§һм¶”кі мһҲлӢӨ. 비н–ү м•Ҳм „ н•„мҲҳ мӢңмҠӨн…ңмқ„ мң„н•ң кІҖмҰқ нҷңлҸҷмқҖ кё°ліё мҡҙмҡ© н”„лЎңнҢҢмқј мҷём—җлҸ„ лӢӨм–‘н•ң ліөн•© кі мһҘ мӢңлӮҳлҰ¬мҳӨ м„Өм •мқ„ л°ҳмҳҒн•ҙм•јн•ҳкё° л•Ңл¬ём—җ мғҒлӢ№н•ң 비мҡ©кіј л…ёл Ҙмқ„ мҡ”кө¬н•ңлӢӨ. лҶ’мқҖ мҲҳмӨҖмқҳ н’Ҳм§Ҳмқ„ мң м§Җн•ҳм—¬ л¬ҙмқён•ӯкіөкё°мқҳ 비н–үм•Ҳм „м„ұмқ„ нҷ•ліҙн•ҳл©ҙм„ң нҡЁкіјм ҒмңјлЎң к°ңл°ң лӘ©н‘ңлҘј лӢ¬м„ұн•ҳкё° мң„н•ҙм„ңлҠ” м •нҳ•нҷ”лҗң м„Өкі„ л°Ҹ кІҖмҰқ м Ҳм°Ёмқҳ м •лҰҪмқҙ н•„мҡ”н•ҳлӢӨ.
ліё л…јл¬ём—җм„ңлҠ” л¬ҙмқён•ӯкіөкё° мӢ лў°м„ұ н–ҘмғҒм—җ кё°м—¬н•ҳкё° мң„н•ң мқҙмӨ‘нҷ” лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң м„Өкі„ л°Ҹ нҶөн•© кІ°кіјлҘј нҒ¬кІҢ л‘җ л¶Җ분мңјлЎң лӮҳлҲ„м–ҙ кё°мҲ н•ҳмҳҖлӢӨ. 2мһҘм—җм„ңлҠ” лҢҖмғҒ л¬ҙмқён•ӯкіөкё°лҘј мң„н•ң лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң мҡ”кө¬лҸ„лҘј м •мқҳн•ҳкі , к·ём—җ л”°лҘё мқҙмӨ‘нҷ” кө¬мЎ° л°Ҹ кө¬м„ұн’Ҳ м—°лҸҷкіј мҡҙмҡ© м„Өкі„ кІ°кіјлҘј кё°мҲ н•ҳмҳҖлӢӨ. 3мһҘм—җм„ңлҠ” мқҙмӨ‘нҷ” лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқ„ л¬ҙмқён•ӯкіөкё°м—җ нҶөн•©н•ҳкі мөңмў… мҡҙмҡ© нҢҗм •м—җ мқҙлҘҙкё°к№Ңм§Җмқҳ лӢЁкі„лі„ нҶөн•© м Ҳм°ЁлҘј м ңм•Ҳн•ҳкі к°ңл°ңмӮ¬лЎҖм—җ 비추м–ҙ к°Ғ лӢЁкі„м—җм„ң мҡ”кө¬лҗҳлҠ” мғҒм„ёмӢңн—ҳ н•ӯлӘ©мқ„ мӢқлі„н•ҳмҳҖлӢӨ. ліҙм•ҲмғҒмқҳ мқҙмң лЎң лҢҖмғҒ л¬ҙмқён•ӯкіөкё°мқҳ нҳ•мғҒ л°Ҹ мҡҙмҡ© лІ”мң„мҷҖ кҙҖл Ёлҗң мҲҳм№ҳлҠ” лӘ…мӢңн•ҳм§Җ м•ҠмқҢмқ„ л°қнҳҖл‘”лӢӨ.
л¬ҙмқён•ӯкіөкё° лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң м„Өкі„
2.1 лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң мҡ”кө¬лҸ„
лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң мғҒм„ё м„Өкі„лҘј мң„н•ҙм„ң лҢҖмғҒ л¬ҙмқён•ӯкіөкё°мқҳ мһ„л¬ҙ н”„лЎңнҢҢмқјкіј нҳ•мғҒм—җ л¶Җн•©н•ҳлҠ” мҡ”кө¬лҸ„лҘј Table 1кіј к°ҷмқҙ м„Өм •н•ҳмҳҖлӢӨ. лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ мІҙкі„м•Ҳм „ мҡ”кө¬лҸ„лҠ” 비н–үм ңм–ҙмӢңмҠӨн…ңмқҳ м•Ҳм „м„ұ нҸүк°ҖлҘј нҶөн•ҙм„ң м„Өм •лҗңлӢӨ. лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ кі мһҘмқҖ лҢҖкё°мһҗлЈҢ мғҒмӢӨ л°Ҹ м ңм–ҙл¶ҲлҠҘ мғҒнғң л°ңмғқ мң„н—ҳмңјлЎң мӢқлі„лҗҳкё° л•Ңл¬ём—җ Catastrophic кё°лҠҘ кі мһҘмңјлЎң 분лҘҳн• мҲҳ мһҲлӢӨ. л”°лқјм„ң лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ м•Ҳм „ мҡ”кө¬мЎ°кұҙмқҖ 10-6/FHмқ„ 충мЎұн•ҙм•ј н•ҳл©° кі мһҘкі„нҶө분м„қ(Fault Tree Analysis)лҘј нҶөн•ҙм„ң мқҙлҘј мһ…мҰқн•ҙм•јн•ңлӢӨ.
TableВ 1.
Air data system requirements
2.2 лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң кө¬м„ұ
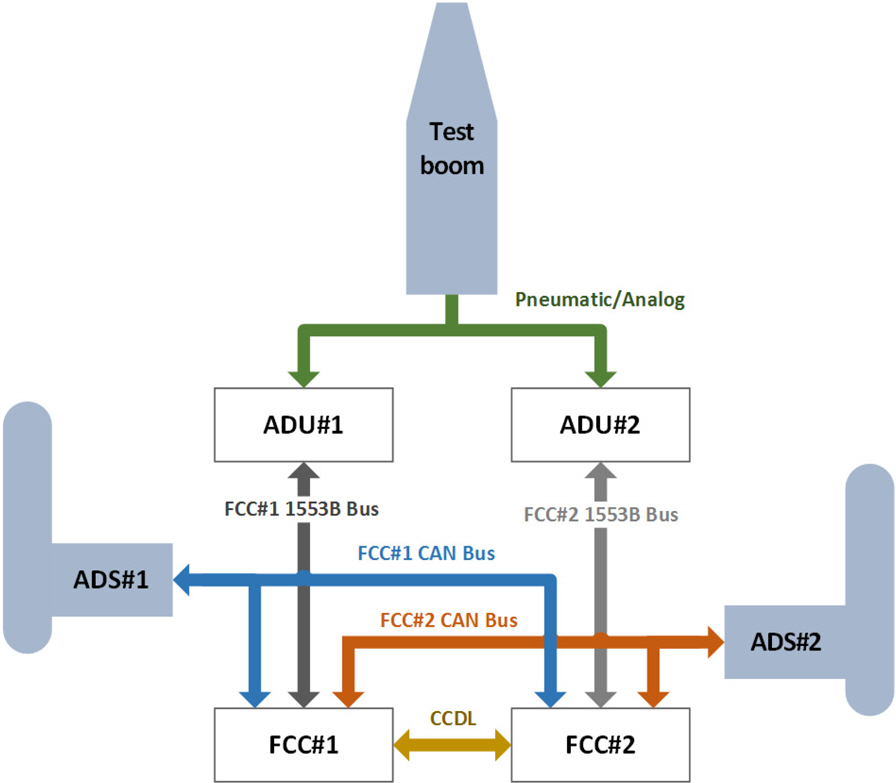
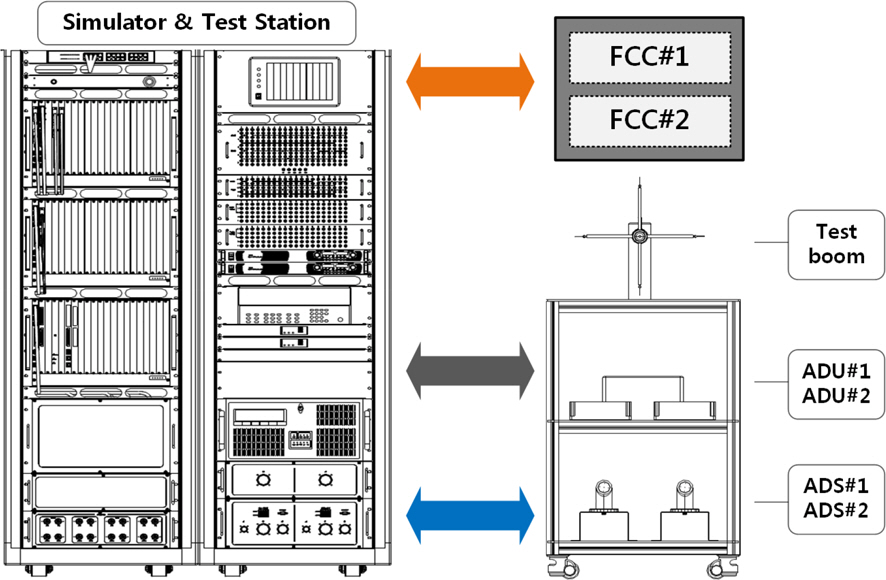
к°ңл°ң мҡ”кө¬лҸ„лҘј 충мЎұн•ҳкё° мң„н•ң лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң кө¬м„ұмқҖ Fig. 1кіј к°ҷлӢӨ. лӢӨмӨ‘нҷ” кө¬мЎ°лҠ” 여분мқҳ н•ҳл“ңмӣЁм–ҙлҘј нҶөн•©н•ҳлҠ” л°©мӢқмқ„ мұ„нғқн•ҳм—¬ 2к°ңмқҳ нҶөн•©нҳ• лҢҖкё°мһҗлЈҢм„јм„ң(Air Data Sensor, ADS)лҘј мЈјмқөмқҳ мўҢмҡ°м—җ к°Ғк°Ғ л°°м№ҳн•ҳлҠ” м–‘мӮ°мҡ© нҳ•мғҒмқ„ к°–лҠ”лӢӨ. мһҘм°© мң„м№ҳлҠ” мЈјмқөм—җ мқҳн•ң мң лҸҷ к°„м„ӯмқ„ мөңмҶҢнҷ”н•ҳлҠ” н•ңнҺё, 비н–үм ңм–ҙм»ҙн“Ён„°(Flight Control Computer, FCC) л°Ҹ м „мӣҗкіјмқҳ кұ°лҰ¬ кё°мӨҖмқ„ лІ—м–ҙлӮҳм§Җ м•ҠлҸ„лЎқ кі л Өн•ҳм—¬ лҢҖм№ӯ кө¬мЎ°лЎң м„ м •н•ңлӢӨ. к°ңл°ң비н–үмӢңн—ҳ к°„ лҢҖкё°мһҗлЈҢ ліҙм •мқ„ мң„н•ҙ мӮ¬мҡ©лҗҳлҠ” мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңлҠ” л¶җ нғҖмһ…мқҳ н”„лЎңлёҢ(Testboom)лҘј кё°мҲҳм—җ мһҘм°©н•ҳкі лҢҖкё°мһҗлЈҢ м—°мӮ°мқ„ мң„н•ң м»ҙн“Ён„°(Air Data Unit, ADU)лҠ” мқҙмӨ‘нҷ”н•ҳм—¬ 비н–үм ңм–ҙм»ҙн“Ён„°мҷҖ м—°лҸҷн•ҳлҠ” л°©мӢқмңјлЎң м„Өкі„н•ҳмҳҖлӢӨ.
м–‘мӮ°мҡ©мңјлЎң нҷңмҡ©лҗҳлҠ” лҢҖкё°мһҗлЈҢм„јм„ңлҠ” Fig. 2(a)мҷҖ к°ҷмқҖ 5кіө м••л Ҙ н”„лЎңлёҢ л°©мӢқмқ„ м„ м •н•ҳмҳҖмңјл©° мЈјмқө лҰ¬л”©м—Јм§Җмқҳ н•ҳлӢЁл¶Җм—җ лёҢлқјмј“мқ„ нҶөн•ҙ мһҘм°©лҗҳлҠ” кө¬мЎ°лҘј к°–лҠ”лӢӨ. н•ҙлӢ№ нғҖмһ…мқҖ мҶҚлҸ„ л°Ҹ кі лҸ„ лҝҗл§Ң м•„лӢҲлқј л°ӣмқҢк°Ғ л°Ҹ мҳҶлҜёлҒ„лҹјк°Ғк№Ңм§Җ м„јм„ң мЈјмң„лЎң нҳ•м„ұлҗҳлҠ” м••л Ҙ 분нҸ¬лҘј мқҙмҡ©н•ҳм—¬ мёЎм •н•ҳлҠ” л°©мӢқмқҙлӢӨ. л¶җм—җ л°ҳкө¬ нҳ•нғңмқҳ мёЎм •л¶Җк°Җ кө¬м„ұлҗҳм–ҙ мһҲмңјл©°, м „м••мқ„ мёЎм •н•ҳкё° мң„н•ң м••л Ҙкіөмқ„ мӨ‘м•ҷм—җ мң„м№ҳн•ҳкі , л°ӣмқҢк°Ғ л°Ҹ мҳҶлҜёлҒ„лҹјк°Ғмқ„ мёЎм •н•ҳкё° мң„н•ң м••л Ҙкіөмқҙ к°Ғк°Ғ 2к°ңм”© мӢӯмһҗ нҳ•нғңлЎң л°°м№ҳлҗҳ м–ҙ мһҲлӢӨ. м •м•• мёЎм •мқ„ мң„н•ң м••л ҘкіөмқҖ м „л°©л¶Җм—җ л¶җмқҳ л‘ҳл ҲлҘј л”°лқјм„ң 8к°ңк°Җ л“ұк°„кІ©мңјлЎң мң„м№ҳн•ҳкі мһҲлӢӨ. мқҙлҹ¬н•ң нҳ•мғҒмқҖ л°ӣмқҢк°Ғ л°Ҹ мҳҶлҜёлҒ„лҹјк°Ғмқ„ мёЎм •н•ҳкё° мң„н•ҙм„ң н”јм№ҳ л°Ҹ мҡ” 축 лІ мқёмқ„ мқҙмҡ©н•ҳм§Җ м•Ҡкі 5кіөм—җм„ң мёЎм •лҗҳлҠ” м••л Ҙ м°ЁмқҙлҘј мқҙмҡ©н•ҳлҠ” мӣҗлҰ¬мқҙкё° л•Ңл¬ём—җ мң лҸҷ нқҗлҰ„м—җ л”°лқј нҡҢм „н•ҳлҠ” кө¬м„ұн’Ҳмқҳ кҙҖм„ұ нҡЁкіјлӮҳ л¶Җм •нҷ•м„ұмқ„ н•ҙмҶҢн• мҲҳ мһҲлӢӨлҠ” мһҘм җмқ„ к°–лҠ”лӢӨ. м„ м • мһҘ비лҠ” нҶөн•©нҳ•мқҙкё° л•Ңл¬ём—җ лӮҙл¶Җ м»ҙн“Ён„°м—җм„ң лҢҖкё°мһҗлЈҢ мӮ°м¶ң кё°лҠҘмқ„ мІҳлҰ¬н•ңлӢӨ.

к°ңл°ң лӢЁкі„м—җм„ңл§Ң мһҘм°© мҡҙмҡ©лҗҳлҠ” мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңлҠ” Fig. 2(b)мҷҖ к°ҷмқҙ н”„лЎңлёҢ 1лҢҖк°Җ н•ӯкіөкё° кё°мҲҳм—җ мһҘм°©лҗҳлҠ” кө¬м„ұмқҙлӢӨ. м–‘мӮ°мҡ© лҢҖкё°мһҗлЈҢм„јм„ңк°Җ ліөмҲҳмқҳ м••л Ҙкіөмқ„ нҶөн•ҙ м••л Ҙ분нҸ¬лҘј мӮ°м¶ңн•ҳлҠ” м••л Ҙкіө л°©мӢқмқҙлқјл©ҙ, мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңлҠ” лІ мқёмқҙ мһҘм°©лҗҳм–ҙ л°”лһҢ л°©н–Ҙм—җ л”°лҘё нҡҢм „ к°ҒлҸ„лҘј м§Ғм ‘ мёЎм •н•ҳлҠ” кё°кі„мӢқ л°©мӢқмқҙлӢӨ[13]. мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңлҠ” м–‘мӮ°мҡ© лҢҖкё°мһҗлЈҢм„јм„ң ліҙм •мқ„ мң„н•ҙ мң лҸҷмқҳ мһҗмң нқҗлҰ„мқ„ мөңлҢҖн•ң м •нҷ•н•ҳкІҢ мёЎм •н•ҙм•ј н•ҳлҜҖлЎң лҸҷмІҙ м§ҒкІҪмқ„ кі л Өн•ҳм—¬ кё°мҲҳлЎңл¶Җн„° 충분н•ң кұ°лҰ¬лҘј к°Җм§Ҳ мҲҳ мһҲлҸ„лЎқ мһҘм°©н•ҳлҠ” кІғмқҙ мӨ‘мҡ”н•ҳлӢӨ.
лӮҷлў°мҡ”кө¬лҸ„м—җ лҢҖн•ң м„Өкі„лҠ” лҢҖкё°мһҗлЈҢм„јм„ң мһҘ비 мҷёл¶Җм—җ лӮҷлў°ліҙнҳён•„н„°лҘј мһҘм°©н•ҳлҠ” л°©мӢқмңјлЎң кө¬м„ұн•ҳмҳҖлӢӨ. лӮҷлў°ліҙнҳён•„н„°лҠ” лҢҖкё°мһҗлЈҢм„јм„ң м»Өл„Ҙн„°м—җ м§Ғм ‘ кІ°н•©н•ҳм—¬ мҷёл¶Җм—җм„ң мң мһ…лҗҳлҠ” к°„м ‘лӮҷлў° мҳҒн–ҘмңјлЎңл¶Җн„° мһҘ비лҘј ліҙнҳён•ҳлҠ” л°©мӢқмқҙлӢӨ. лӮҷлў°ліҙнҳён•„н„°мқҳ м„Өкі„ мӢң лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңм—җ мҡ”кө¬лҗҳлҠ” к°„м ‘лӮҷлў° кё°мӨҖ л ҲлІЁкіј м»Өл„Ҙн„°мқҳ н•Җ лі„ нҠ№м„ұм—җ м Ғн•©н•ң мҶҢмһҗлҘј м„ м •н•ҙм•ј н•ҳл©°, лӮҷлў°ліҙнҳён•„н„°лЎң мқён•ҳм—¬ лҢҖкё°мһҗлЈҢм„јм„ңмҷҖ 비н–үм ңм–ҙм»ҙн“Ён„° к°„ нҶөмӢ м—җ мҳҒн–Ҙмқ„ мЈјм§Җ м•ҠлҸ„лЎқ м •м „мҡ©лҹүкіј м „кё°м Ғ ліёл”©мқ„ кі л Өн•ҳм—¬ м„Өкі„н•ңлӢӨ.
2.3 лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң м—°лҸҷ м„Өкі„
лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ лӮҙмҷёл¶Җ м—°лҸҷмқҖ Fig. 1м—җ н‘ңнҳ„лҗң л°”мҷҖ к°ҷмқҙ м—°л°©нҳ• кө¬мЎ°лҘј кё°л°ҳмңјлЎң н•ҳм—¬ лІ„мҠӨ нҶөм ң м—ӯн• мқ„ н•ҳлҠ” мқҙмӨ‘нҷ” 비н–үм ңм–ҙм»ҙн“Ён„°лҘј мӨ‘мӢ¬мңјлЎң к°Ғк°Ғмқҳ лҚ°мқҙн„° лІ„мҠӨлҘј нҶөн•ҙ м—°лҸҷ мһҘ비 к°„ л©”мӢңм§ҖлҘј мҶЎмҲҳмӢ н•ҳлҠ” л°©мӢқмқҙлӢӨ.
м–‘мӮ°мҡ© лҢҖкё°мһҗлЈҢм„јм„ңлҠ” 비н–үм ңм–ҙм»ҙн“Ён„°мҷҖ CAN лІ„мҠӨ л°©мӢқмңјлЎң л„ӨнҠёмӣҢнҒ¬лҘј кө¬м„ұн•ҳмҳҖлӢӨ. лҚ°мқҙн„°нҶөмӢ н”„лЎңнҶ мҪңмқҖ н•ӯкіөм „мһҗмӢңмҠӨн…ң м Ғмҡ© лӘ©м ҒмңјлЎң н‘ңмӨҖнҷ” лҗң CANaerospaceлҘј мұ„мҡ©н•ҳмҳҖлӢӨ. к°Ғк°Ғмқҳ CAN лІ„мҠӨлҠ” лҢҖкё°мһҗлЈҢм„јм„ң 1лҢҖмҷҖ мқҙмӨ‘нҷ” лҗң 비н–үм ңм–ҙм»ҙн“Ён„°лҘј м§Ғм ‘ м—°лҸҷн•ҳм—¬ ліөн•© кі мһҘмқҙ л°ңмғқн•ҳлҠ” кІҪмҡ°м—җлҸ„ 여분мқҳ нҶөмӢ кІҪлЎңлҘј нҶөн•ҙ лҢҖмІҳ к°ҖлҠҘн•ҳлҸ„лЎқ н•ҳмҳҖлӢӨ. мҳҲлҘј л“Өл©ҙ, CAN лІ„мҠӨ л°Ҹ к°Ғ мһҘ비 мғҒнғңк°Җ лӘЁл‘җ м •мғҒмқј л•ҢлҠ” FCC#1- ADS#1 л°Ҹ FCC#2-ADS#2 м—°лҸҷл§Ң мҡҙмҡ©н•ҳкі CCDLмқ„ нҶөн•ҙ FCC#1мҷҖ FCC#2 к°„ мғҒнғңм •ліҙлҘј кіөмң н•ҳм§Җл§Ң, FCC#1 л°Ҹ ADS#2 мһҘ비к°Җ кі мһҘмқё кІҪмҡ° FCC#2м—җм„ң ADS#1 CAN BusлҘј нҶөм ңн•ҳм—¬ ADS#1мҷҖ нҶөмӢ мқ„ мҲҳн–үн•ҳлҠ” л°©мӢқмқҙлӢӨ. мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңмқҳ кІҪмҡ° м–‘мӮ°мҡ© лҢҖкё°мһҗлЈҢм„јм„ңмҷҖ лӢ¬лҰ¬ к°Ғк°Ғмқҳ 1553B лІ„мҠӨк°Җ лҢҖкё°мһҗлЈҢм»ҙн“Ён„° 1лҢҖмҷҖ лӢЁмқј 비н–үм ңм–ҙм»ҙн“Ён„° лӘЁл“ҲлЎң кө¬м„ұлҗҳм–ҙ к°Ғ мұ„л„җмқ„ нҶөн•ҙ мқјлҢҖмқј нҶөмӢ л§Ң мҲҳн–үн•ҳлҸ„лЎқ кө¬м„ұн•ҳмҳҖлӢӨ.
лҢҖкё°мһҗлЈҢ мІҳлҰ¬ нқҗлҰ„мқҖ к°Ғ лҢҖкё°мһҗлЈҢм„јм„ң н”„лЎңлёҢм—җм„ң мһҘм°© мң„м№ҳ кё°мӨҖ көӯл¶Җмң лҸҷ лҢҖкё°мһҗлЈҢ нҠ№м„ұмқ„ мёЎм •н•ҳлҠ” кІғмңјлЎң мӢңмһ‘лҗңлӢӨ. мқҙнӣ„ к°Ғк°Ғмқҳ нҶөн•©нҳ• лҢҖкё°мһҗлЈҢм„јм„ң лӮҙл¶Җ м»ҙн“Ён„°лҠ” лҚ°мқҙн„° лІ„мҠӨ мұ„л„җмқ„ нҶөн•ҙм„ң мёЎм •к°’мқ„ 비н–үм ңм–ҙм»ҙн“Ён„°лЎң м „мҶЎн•ңлӢӨ. 비н–үм ңм–ҙм»ҙн“Ён„°лҠ” мқҙмӨ‘нҷ” лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ мёЎм •к°’мқ„ мһ…л Ҙл°ӣм•„м„ң мһҘм°© мң„м№ҳм—җ л”°лҘё мҳӨм°ЁлҘј ліҙм •н•ң л’Өм—җ м„ нғқ мұ„л„җмқҳ мғҒнғңм •ліҙлҘј 비н–үм ңм–ҙлІ•м№ҷ мһ…л Ҙк°’мңјлЎң мІҳлҰ¬н•ҳкі мҡҙмҡ©мһҗмқҳ к°җмӢңк°Җ мҡ”кө¬лҗҳлҠ” н•ӯлӘ©м—җ лҢҖн•ҙм„ңлҠ” лҚ°мқҙн„°л§ҒнҒ¬лҘј нҶөн•ҙ м§ҖмғҒнҶөм ңмІҙкі„лЎң м „мҶЎн•ҳлҠ” кіјм •мқ„ л§Ө мІҳлҰ¬ мЈјкё°л§ҲлӢӨ л°ҳліөн•ңлӢӨ.
2.4 лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң мҡҙмҡ© м„Өкі„
мқҙмӨ‘нҷ” лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқ„ мң„н•ң мҡҙмҡ© м„Өкі„ кІ°кіјлҠ” Fig. 3мҷҖ к°ҷлӢӨ. мұ„л„җ кҙҖлҰ¬лҠ” мқҙмӨ‘нҷ” 비н–үм ңм–ҙм»ҙн“Ён„°к°Җ к°Ғ лҚ°мқҙн„° лІ„мҠӨмқҳ мЈј мұ„л„җмқ„ нҶөм ңн•ҳкі , м–ҙлҠҗ н•ң мұ„л„җм—җм„ң кі мһҘмқҙ л°ңмғқн•ҳлҠ” кІҪмҡ° к°Җмҡ©н•ң лҚ°мқҙн„° м „мҶЎ кІҪлЎңлҘј нҶөн•ҙм„ң лҢҖкё°мһҗлЈҢлҘј мң нҶөн•ҳм—¬ 비н–үн•„мҲҳ кё°лҠҘмқҙ мң м§Җлҗ мҲҳ мһҲлҸ„лЎқ н•ңлӢӨ. 비н–үм ңм–ҙм»ҙн“Ён„°лҠ” л§Ө лҸҷмһ‘ мЈјкё°л§ҲлӢӨ лҢҖкё°мһҗлЈҢм„јм„ң кі мһҘмғҒнғңлҘј лӘЁлӢҲн„°л§Ғн•ҳкі мұ„л„җ мң м§Җ лҳҗлҠ” м „нҷҳ м—¬л¶ҖлҘј кІ°м •н•ңлӢӨ. лҢҖкё°мһҗлЈҢм„јм„ңм—җ лҢҖн•ң кі мһҘмғҒнғң мӢқлі„мқҖ мһҘ비мқҳ мһҗк°Җ진лӢЁ кІ°кіјмҷҖ м„јм„ң м¶ңл Ҙ мӢ нҳёмқҳ мң нҡЁм„ұмқ„ нҢҗлі„н•ҳм—¬ мөңмў… кІ°м •н•ҳкІҢ лҗңлӢӨ. мұ„л„җ м „нҷҳ м—¬л¶Җк°Җ кІ°м •лҗҳл©ҙ 비н–үм ңм–ҙм»ҙн“Ён„°лҠ” м„ нғқ мұ„л„җмқҳ лҢҖкё°мһҗлЈҢлҘј м ңм–ҙлІ•м№ҷ мӮ°м¶ң лЎңм§ҒмңјлЎң мһ…л Ҙн•ңлӢӨ.

м„јм„ң кі мһҘ нғҗм§Җ кё°лҠҘмқҖ мқҙмӨ‘нҷ” лҢҖкё°мһҗлЈҢм„јм„ң м¶ңл Ҙмқ„ 비көҗн•ҳм—¬ лҢҖкё°мһҗлЈҢ л¶Ҳмқјм№ҳ кІҪкі мӢ нҳёлҘј мғқм„ұн•ҳлҠ” м—ӯн• мқ„ лӢҙлӢ№н•ңлӢӨ. кІҪкі мӢ нҳёлҠ” м§ҖмғҒнҷңмЈј кө¬к°„мқ„ нҸ¬н•Ён•ң к°Ғ 비н–ү лӢЁкі„м—җм„ң кі лҸ„, мҶҚлҸ„, л°ӣмқҢк°Ғ, мҳҶлҜёлҒ„лҹјк°Ғм—җ н•ҙлӢ№н•ҳлҠ” мёЎм •к°’мқҙ мқјм • мҲҳмӨҖ мқҙмғҒмңјлЎң м—°мҶҚн•ҳм—¬ нҺём°Ёк°Җ л°ңмғқн• л•Ң л°ңн–үн•ңлӢӨ. лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң 비мғҒ н•ҙм ң кё°лҠҘмқҖ к°Ғ мһҘ비мқҳ мһҗк°Җ진лӢЁ кІ°кіјлҠ” м •мғҒмқҙм§Җл§Ң мҡҙ мҡ©мһҗк°Җ лҢҖкё°мһҗлЈҢ мёЎм •к°’мқ„ мӢ лў°н• мҲҳ м—ҶлӢӨкі нҢҗлӢЁлҗ л•Ң мӮ¬мҡ©н•ҳлҠ” кё°лҠҘмқҙлӢӨ. 비мғҒ н•ҙм ң кё°лҠҘмқҙ мӮ¬мҡ©лҗҳлҠ” кІҪмҡ° м ңм–ҙлІ•м№ҷмқҖ н•ӯлІ•м„јм„ң м¶ңл Ҙл§Ң мӮ¬мҡ©н•ҳм—¬ кі лҸ„ л°Ҹ мҶҚлҸ„ м ңм–ҙлҘј мҲҳн–үн•ҳлҠ” л°©мӢқмңјлЎң лЎңм§Ғмқ„ м „нҷҳн•ҳм—¬ лҢҖкё°мһҗлЈҢ л№„м •мғҒ м§ҖмӢңм—җ л”°лҘё мҳҒн–Ҙм„ұмқ„ мөңмҶҢнҷ”н•ңлӢӨ.
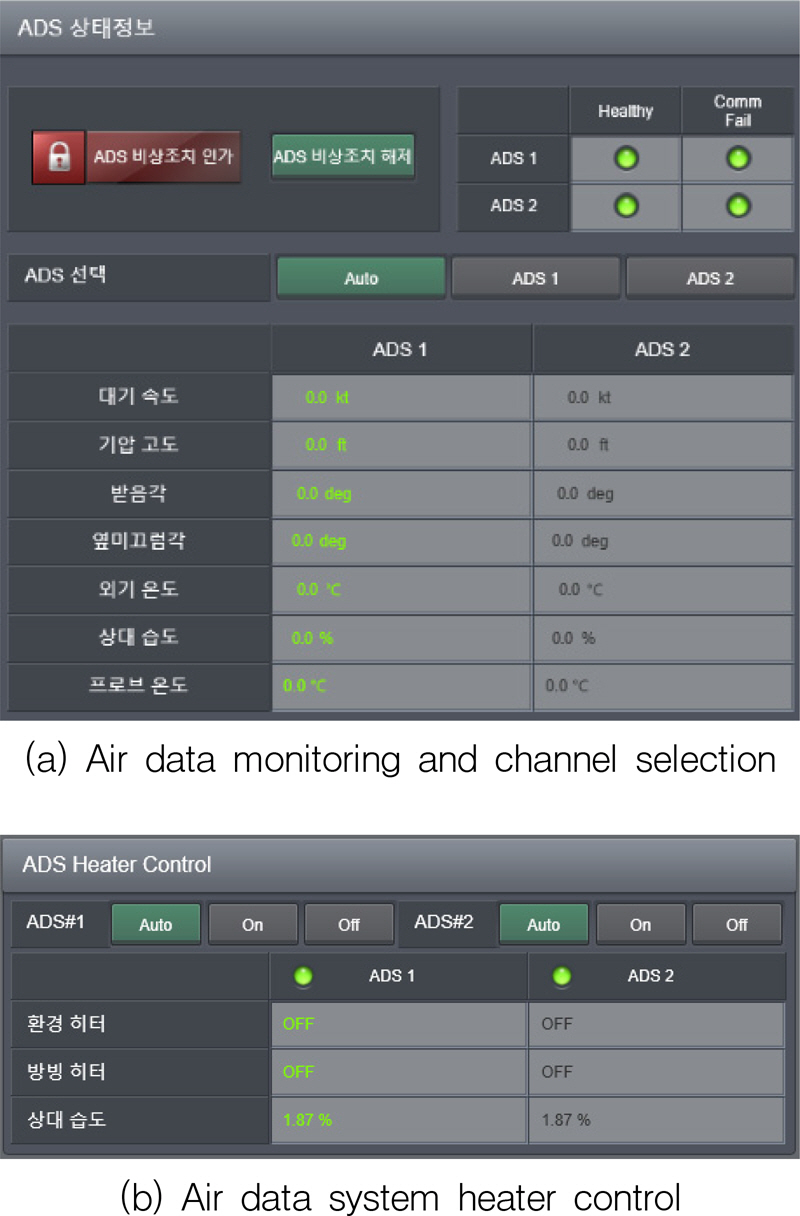
л¬ҙмқён•ӯкіөкё° мҡҙмҡ©мһҗлҠ” 비н–ү мӨ‘ лҢҖкё°мһҗлЈҢ л¶Ҳмқјм№ҳ кІҪкі к°Җ мӢңнҳ„лҗҳл©ҙ л‘җ к°Җм§Җ мӨ‘ н•ҳлӮҳлЎң 비мғҒ м Ҳм°ЁлҘј 진н–үн•ңлӢӨ. мІ«м§ёлҠ” кІҪкі л°ңмғқ м „нӣ„ н•ӯкіөкё° кұ°лҸҷмқ„ кі л Өн• л•Ң мҡҙмҡ©мһҗк°Җ мқҙмӨ‘нҷ” лҢҖкё°мһҗлЈҢм„јм„ң мӨ‘ м–ҙлҠҗ н•ҳлӮҳлҘј м •мғҒмқҙлқјкі нҢҗлӢЁн• мҲҳ мһҲлҠ” кІҪмҡ°мқҙл©°, мқҙл•ҢлҠ” мҲҳлҸҷ мұ„л„җ м„ нғқ кё°лҠҘмқ„ мқҙмҡ©н•ҙ мҡҙмҡ©мһҗк°Җ м§Ғм ‘ м ңм–ҙлІ•м№ҷм—җм„ң мӮ¬мҡ©н• лҢҖкё°мһҗлЈҢлҘј м„ нғқн•ңлӢӨ. л‘ҳм§ёлҠ” лҢҖкё°мһҗлЈҢ мғҒнғңк°Җ кёүліҖн•ҳм—¬ мқҙмӨ‘нҷ” лҢҖкё°мһҗлЈҢм„јм„ң лӘЁл‘җ л№„м •мғҒмқҙлқјкі нҢҗлӢЁлҗҳлҠ” кІҪмҡ°лЎң, мқҙл•ҢлҠ” мӢ мҶҚн•ҳкІҢ 비мғҒ лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң н•ҙм ң кё°лҠҘмқ„ мқёк°Җн•ЁмңјлЎңмҚЁ л№„м •мғҒ лҢҖкё°мһҗлЈҢ мғҒнғңм •ліҙк°Җ м ңм–ҙлІ•м№ҷм—җ мһ…л Ҙлҗҳм–ҙ л¶Ҳм•Ҳм •н•ң н•ӯкіөкё° кё°лҸҷмқҙ мң л°ңлҗҳлҠ” кІғмқ„ л°©м§Җн•ңлӢӨ. 비мғҒ лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң н•ҙм ң кё°лҠҘмқ„ мң м§Җн•ҳл©ҙм„ң м җкІҖ 비н–үмқ„ мҲҳн–үн•ҳлҠ” лҸҷм•Ҳ кІҪкі мғҒнҷ©мқҙ н•ҙмҶҢлҗҳл©ҙ н•ҙм ң кё°лҠҘмқ„ н’Җкі лӢӨмӢң н•ӯкіөкё°лҘј м •мғҒ мҡҙмҡ©н•ңлӢӨ. лҢҖкё°мһҗлЈҢ л¶Ҳмқјм№ҳ кІҪкі к°Җ мң м§Җлҗҳкі м •мғҒ лҢҖкё°мһҗлЈҢм„јм„ң лҳҗн•ң нҢҗлӢЁн• мҲҳ м—ҶлҠ” кІҪмҡ°м—җлҠ” мҡҙмҡ©мһҗмқҳ м§Ғм ‘м Ғмқё нҶөм ң н•ҳм—җ ліөк·Җн•ңлӢӨ. мӮјмӨ‘нҷ” 비н–үм ңм–ҙмӢңмҠӨн…ңм—җм„ңлҠ” ліҙнҢ… кё°лІ•мқ„ нҶөн•ҙ кұҙм „н•ң лҚ°мқҙн„°лҘј 비н–үм ңм–ҙм»ҙн“Ён„°м—җм„ң мһҗлҸҷ м„ нғқн•ҳлҠ” л°©мӢқмқ„ мҡ°м„ м Ғмҡ©н• мҲҳ мһҲм§Җл§Ң, мқҙмӨ‘нҷ” кө¬мЎ°м—җм„ңлҠ” 비н–үм ңм–ҙм»ҙн“Ён„°мқҳ м—ӯн• мқҙ мӢңмҠӨн…ңмқҳ мқҙмғҒмқ„ к°җм§Җн•ҳлҠ” мҲҳмӨҖмңјлЎң м ңн•ңлҗҳкё° л•Ңл¬ём—җ л№„м •мғҒ мғҒнҷ© лҢҖмІҳм—җ мһҲм–ҙ мҡҙмҡ©мһҗмқҳ м Ғк·№м Ғмқё к°ңмһ…мқҙ мҡ”кө¬лҗңлӢӨ. мқҙмӨ‘нҷ” лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ мғҒнғңм •ліҙ лӘЁлӢҲн„°л§Ғ л°Ҹ мұ„л„җ м„ нғқ кё°лҠҘмқ„ мң„н•ң мҡҙмҡ©мһҗ мқён„°нҺҳмқҙмҠӨ кө¬нҳ„кІ°кіјлҠ” Fig. 4(a)мҷҖ к°ҷлӢӨ.
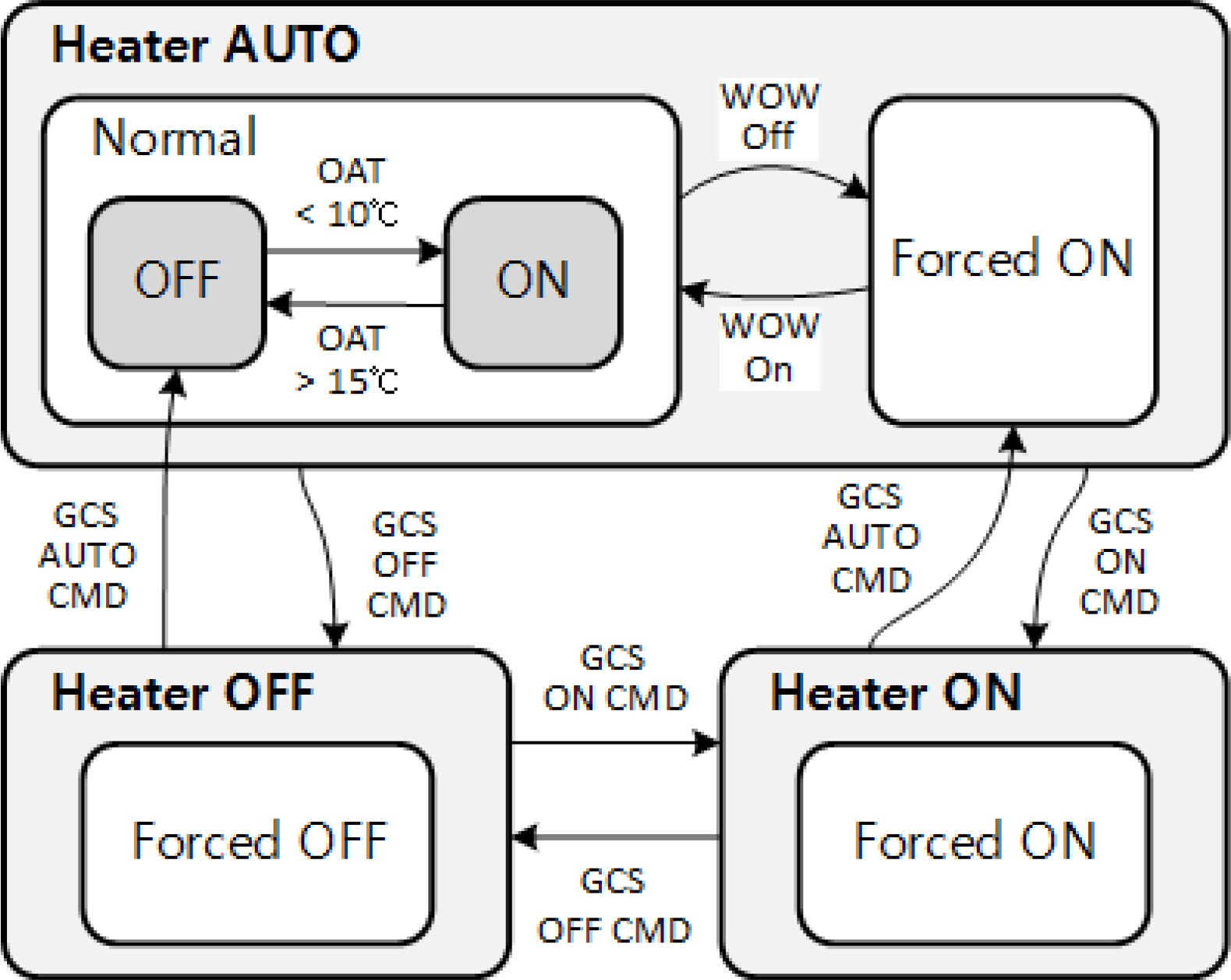
лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ нһҲн„°лҠ” мҷёкё°мҳЁлҸ„(Outside Air Temperature, OAT)мҷҖ н•ӯкіөкё° м ‘м§Җ мғҒнғң(Weight On Wheel, WOW)м—җ л”°лқјм„ң лҸҷмһ‘ м—¬л¶ҖлҘј кІ°м •н•ҳлҠ” мһҗлҸҷлӘЁл“ңлҘј л°ҳмҳҒн•ҳм—¬ Fig. 5мҷҖ к°ҷмқҙ мғҒнғңм „мқҙ мЎ°кұҙмқ„ м„Өкі„н•ҳмҳҖлӢӨ. н•ӯкіөкё°к°Җ м§ҖмғҒм—җ м ‘м§Җн•ҳкі мһҲлҠ” лҸҷм•Ҳм—җлҠ” лҢҖкё°мһҗлЈҢм„јм„ң лӮҙл¶Җ кё°лҠҘм—җ л”°лқј мҷёкё°мҳЁлҸ„м—җ л”°лқј мһҗмІҙ нҢҗлӢЁн•ҳлҠ” лҸҷмһ‘ мғҒнғңлҘј л”°лҘёлӢӨ. 비н–ү мғҒнғңк°Җ лҗҳл©ҙ лҢҖкё°мһҗлЈҢм„јм„ңлҠ” 비н–үм ңм–ҙм»ҙн“Ён„° лӘ…л №м—җ л”°лқј лӮҙл¶Җ лӘЁл“ңлҘј ліҖкІҪн•ҳм—¬ к°•м ң мқёк°ҖмғҒнғңлЎң лҸҷмһ‘н•ңлӢӨ. мқҙлҹ¬н•ң мһҗлҸҷлӘЁл“ң м„Өкі„лҠ” лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ нһҲн„° кө¬м„ұ л°Ҹ кіјм—ҙ л°©м§Җ кё°лҠҘ ліҙмң м—¬л¶ҖлҘј кі л Өн•ҳм—¬ н•ӯкіөкё° мҡҙмҡ© нҷҳкІҪм—җ л”°лқј мөңм Ғнҷ”н• мҲҳ мһҲлӢӨ. м „мІҙ мһ„л¬ҙкө¬к°„м—җм„ң лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң л°©л№ҷнһҲн„°лҠ” мһҗлҸҷлӘЁл“ңлЎң мҡҙмҡ©н•ҳлҠ” кІғмқ„ кё°ліёмңјлЎң н•ҳм§Җ л§Ң кё°лҠҘ м җкІҖмқҙлӮҳ мҡҙмҡ©мһҗмқҳ нҢҗлӢЁм—җ л”°лқј мқёк°Җ л°Ҹ н•ҙм ңк°Җ к°ҖлҠҘн•ҳлҸ„лЎқ м„Өкі„н•ҳмҳҖлӢӨ. нһҲн„° мғҒнғңм •ліҙ нҷ•мқё л°Ҹ нҶөм ңлҘј мң„н•ң мҡҙмҡ© нҷ”л©ҙмқҖ Fig. 4(b)мҷҖ к°ҷмқҙ мқҙмӨ‘нҷ” мһҘ비лҘј к°ңлі„м ҒмңјлЎң нҶөм ңн• мҲҳ мһҲлҸ„лЎқ лҸ…лҰҪм ҒмңјлЎң кө¬нҳ„н•ңлӢӨ.
л¬ҙмқён•ӯкіөкё° лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң нҶөн•©
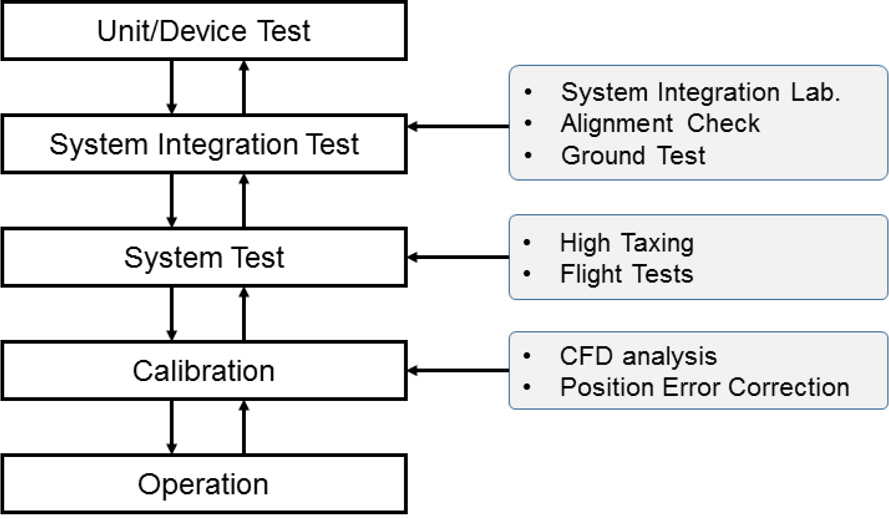
ліё мһҘм—җм„ңлҠ” мғҒм„ём„Өкі„ кІ°кіјлЎң кө¬нҳ„лҗң лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқ„ л¬ҙмқён•ӯкіөкё°м—җ нҶөн•©н•ҳкё° мң„н•ң м Ҳм°Ё мҲҳлҰҪ кІ°кіјлҘј кё°мҲ н•ҳмҳҖлӢӨ. лЁјм Җ лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ л¬ҙмқён•ӯкіөкё° мІҙкі„ нҶөн•© кіјм •мқҖ Fig. 6мҷҖ к°ҷмқҙ лӢЁн’Ҳ м җкІҖм—җм„ңл¶Җн„° мөңмў… мҡҙмҡ©м—җ мқҙлҘҙкё°к№Ңм§Җ 5к°Җм§Җ лӢЁкі„лЎң кө¬м„ұн•ҳмҳҖлӢӨ[14]. мІ« лІҲм§ё лӢЁкі„лҠ” м „мҡ© м җкІҖмһҘ비лҘј нҶөн•ҙ лҢҖкё°мһҗлЈҢм„јм„ң лӢЁн’Ҳмқҳ м •мғҒ лҸҷмһ‘ мң л¬ҙлҘј м җкІҖн•ҳлҠ” к°ҖмһҘ кё°ліём Ғмқё м Ҳм°ЁмқҙлӢӨ. мқҙ лӢЁкі„м—җм„ңлҠ” м „мҡ© м җкІҖмһҘ비мҷҖ лҢҖкё°мһҗлЈҢм„јм„ңлҘј нҶөмӢ мјҖмқҙлё” л°Ҹ кіөм••кҙҖмңјлЎң м—°кІ°н•ҳм—¬ м„јм„ңмқҳ мһҗк°Җ진лӢЁ кІ°кіјлҘј лӘЁлӢҲн„°л§Ғн•ңлӢӨ. мёЎм • м„ұлҠҘмқҳ м •нҷ•лҸ„лҠ” м җкІҖмһҘ비мқҳ лҸҷм •м•• лӘЁмӮ¬ кё°лҠҘмқ„ нҶөн•ҙ мҳӨм°Ё лІ”мң„ лӮҙ м¶ңл ҘлҗҳлҠ”м§ҖлҘј нҷ•мқён•ңлӢӨ. лӢЁн’Ҳ м җкІҖмқҙ мҷ„лЈҢлҗҳл©ҙ мІҙкі„нҶөн•©мӢңн—ҳ, мІҙкі„мӢңн—ҳ, ліҙм •мқ„ кұ°міҗ мҡҙмҡ© кІ°м •мңјлЎң л§Ҳл¬ҙлҰ¬ лҗңлӢӨ. к°Ғ лӢЁкі„мқҳ мӢңн—ҳ кІ°кіјк°Җ н•ҙлӢ№ кё°мӨҖмқ„ 충мЎұн•ҳм§Җ лӘ»н•ҳкұ°лӮҳ кІ°н•ЁмӮ¬н•ӯмқҙ мӢқлі„лҗҳлҠ” кІҪмҡ°м—җлҠ” кі мһҘнғҗкө¬ л°Ҹ м„Өкі„ ліҖкІҪмқ„ мҲҳн–үн•ҳкі нҡҢк·ҖмӢңн—ҳмқ„ нҶөн•ҙ мқҙм „ лӢЁкі„м—җм„ңмқҳ мқҙмғҒ мң л¬ҙлҘј мһ¬нҷ•мқён•ңлӢӨ.
3.1 мІҙкі„нҶөн•©мӢңн—ҳ
3.1.1 мІҙкі„нҶөн•©мӢӨн—ҳмӢӨ(System Integration Lab.)
лӢЁн’Ҳ м„ұлҠҘмқҙ нҷ•мқёлҗң лҢҖкё°мһҗлЈҢм„јм„ңлҠ” мІҙкі„нҶөн•©мӢӨн—ҳмӢӨм—җ мһҘм°©н•ҳм—¬ лӢӨлҘё нғ‘мһ¬мһҘ비л“Өкіј м—°лҸҷн•ҳкі нҶөн•© кё°лҠҘмқ„ мӢңн—ҳн•ңлӢӨ. мІҙкі„нҶөн•©мӢӨн—ҳмӢӨмқҖ мӢӨлӮҙм—җм„ң н•ӯкіөкё° л°Ҹ м§ҖмғҒнҶөм ңмІҙкі„м—җ нғ‘мһ¬лҗҳлҠ” мӢӨмһҘ비лҘј мӢӨм ңмҷҖ к°ҷмқҙ м—°кІ°н•ҳм—¬ мІҙкі„ м—°лҸҷм„Өкі„лҘј кІҖмҰқн• мҲҳ мһҲлҠ” нҷҳкІҪмқ„ м ңкіөн•ңлӢӨ. лҳҗн•ң мІҙкі„нҶөн•©мӢӨн—ҳмӢӨм—җм„ңлҠ” н•ӯкіөкё° лӘЁмқҳ мӢң뮬л Ҳмқҙн„°, мӢ нҳёлӘЁмӮ¬мһҘм№ҳлҘј нҶөм ңн•ҳм—¬ к°Ғмў… мҡҙмҡ© мӢңлӮҳлҰ¬мҳӨлҘј мӢӨн–үн•ҳкі лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҙ мғҒмң„ мҡ”кө¬лҸ„ л°Ҹ м„Өкі„ мқҳлҸ„м—җ л”°лқј лҸҷмһ‘н•ҳлҠ”м§ҖлҘј нҷ•мқён• мҲҳ мһҲлӢӨ[15]. мӢӨн—ҳмӢӨ нҷҳ кІҪм—җм„ңлҠ” н•ӯкіөкё° мһҘм°© мғҒнғңм—җм„ң м§Ғм ‘м Ғмқё нҷ•мқёмқҙ м ңн•ңлҗҳлҠ” нғ‘мһ¬мһҘ비 к°„ мҶЎмҲҳмӢ л©”мӢңм§Җ лӘЁлӢҲн„°л§ҒмқҙлӮҳ нҶөмӢ н’Ҳм§Ҳ м җкІҖмқҙ к°ҖлҠҘн•ҳкё° л•Ңл¬ём—җ мқҙ кіјм •м—җм„ң м „кё°м Ғ нҶөн•© нҠ№м„ұмқ„ нҷ•мқён•ҳлҠ” м Ҳм°ЁлҘј л°ҳмҳҒн• мҲҳ мһҲлӢӨ. лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң кІҖмҰқ кҙҖл Ё мІҙкі„нҶөн•©мӢӨн—ҳмӢӨ кө¬м„ұмқҖ Fig. 7кіј к°ҷлӢӨ.
мІҙкі„нҶөн•©мӢӨн—ҳмӢӨм—җм„ң мҡ”кө¬лҗҳлҠ” мӢңн—ҳмқҳ мў…лҘҳлҘј 세분нҷ”н•ҳл©ҙ к°ңлЈЁн”„ нҷҳкІҪм—җм„ң лӢЁмң„ лӘ…л №м—җ л”°лҘё мқ‘лӢөмқ„ нҷ•мқён•ҳм—¬ 비н–үмҡҙмҡ©н”„лЎңк·ёлһЁмқҳ мҡ”кө¬лҸ„ 충мЎұм„ұмқ„ кІҖмҰқн•ҳкё° мң„н•ң лҸ…лҰҪк°қмІҙмӢңн—ҳ(Stand Alone Verification and Validation)кіј мһ„мқҳ кі мһҘ мӢңлӮҳлҰ¬мҳӨлҘј мЈјмһ…н•ҳм—¬ мӢңмҠӨн…ң к°•кұҙм„ұмқ„ нҷ•мқён•ҳлҠ” кі мһҘмЈјмһ… нӣ„ мҳҒн–Ҙм„ұ нҸүк°ҖмӢңн—ҳ(Failure Modes and Effects Test)мқҳ л‘җ к°Җм§Җ л°©мӢқмңјлЎң кө¬л¶„н• мҲҳ мһҲлӢӨ. Table 2лҠ” мІҙкі„нҶөн•©мӢӨн—ҳмӢӨм—җм„ң нҷ•мқёлҗҳм–ҙм•ј н• лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң кё°лҠҘмқ„ кө¬м„ұн’Ҳмқҳ лӢЁмң„ кё°лҠҘкіј мІҙкі„ м—°лҸҷмғҒнғңм—җм„ң мҲҳн–үлҗҳм–ҙм•ј н• мІҙкі„мҡҙмҡ© кё°лҠҘмңјлЎң кө¬л¶„н•ҳм—¬ лӮҳм—ҙн•ң кІғмқҙлӢӨ. лӢЁмң„ кё°лҠҘм—җ лҢҖн•ң мӢңн—ҳмқҖ лҸ…лҰҪк°қмІҙмӢңн—ҳ м Ҳм°ЁлҘј мҲҳлҰҪн•ҳкі мІҙкі„ мҡҙмҡ©кё°лҠҘм—җ лҢҖн•ҙм„ңлҠ” кі мһҘ мғҒнҷ©м—җм„ңмқҳ мӢңмҠӨн…ң мҳҒн–Ҙм„ұмқ„ кі л Өн•ҳм—¬ кі мһҘмЈјмһ… нӣ„ мҳҒн–Ҙм„ұ нҸүк°ҖмӢңн—ҳ м Ҳм°ЁлҘј мҲҳлҰҪн•ңлӢӨ.
TableВ 2.
Air data system verification testcases for a system integration laboratory
3.1.2 мһҘм°© м •л ¬ кІҖмӮ¬
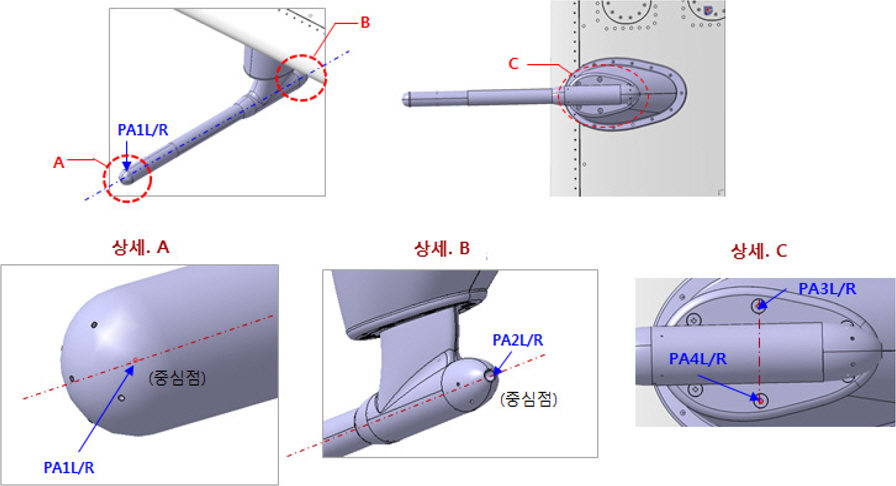
лҢҖкё°мһҗлЈҢм„јм„ңмқҳ кё°кө¬н•ҷм Ғмқё мһҘм°© м •л ¬ кІҖмӮ¬лҠ” н•ӯкіөкё° мҙқмЎ°лҰҪ кіјм • мӨ‘ мЈјмқө м ңмһ‘ м№ҳкө¬м—җм„ң мҲҳн–үлҗңлӢӨ. лҢҖкё°мһҗлЈҢм„јм„ңлҠ” лҢҖкё° нқҗлҰ„м—җ лҢҖн•ң н•ӯкіөкё°мқҳ мғҒнғңлҘј мёЎм •н•ҳлҠ” кІғмқҙлҜҖлЎң н—Ҳмҡ© мҳӨм°Ё мқҙлӮҙлЎң м •л ¬мқҙ мқҙлЈЁм–ҙм ём•ј мёЎм •к°’мқҳ м •нҷ•лҸ„лҘј ліҙмһҘн• мҲҳ мһҲлӢӨ. лҢҖкё°мһҗлЈҢм„јм„ң мһҘм°© м •л ¬ кІҖмӮ¬лҠ” н•ӯкіөкё° мўҢн‘ң лҢҖ비 мғҒлҢҖм Ғмқё мһҗм„ёк°Җ мӨ‘мҡ”н•ҳкё° л•Ңл¬ём—җ л Ҳмқҙм Җ нҠёлһҳм»ӨлҘј мқҙмҡ©н•ҳм—¬ н•ӯкіөкё°м—җ мҷёл¶Җ кІҖмӮ¬м җмқҳ мң„м№ҳлҘј кё°мӨҖмңјлЎң м ҲлҢҖ мўҢн‘ңм—җ лҢҖн•ң лЎӨ, н”јм№ҳ, мҡ” 축 лі„ м •л ¬ кІ°кіјлҘј мёЎм •н•ңлӢӨ. лҢҖкё°мһҗлЈҢм„јм„ң мһҘм°© н—Ҳмҡ© мҳӨм°ЁлҠ” лЎӨ, н”јм№ҳ, мҡ” л°©н–ҘмңјлЎң Вұ0.5В°лЎң м„Өм •н•ҳмҳҖмңјл©°, мЈјмқө м ңмһ‘ м№ҳкө¬м—җм„ң мёЎм •н•ҳлҜҖлЎң мқҙнӣ„ мЈјмқө мЎ°лҰҪ мӢң л°ңмғқн•ҳлҠ” мЈјмқө 비нӢҖлҰјк°Ғ(н”јм№ҳ), мЈјмқө мғҒл°ҳк°Ғ(лЎӨ), мЈјмқө л¶ҷмһ„к°Ғ(н”јм№ҳ), мЈјмқө м –нһҳк°Ғ(мҡ”) мҳӨм°ЁлҘј м ңмҷён•ң к°’мңјлЎң м„ м •н•ңлӢӨ.
н•ӯкіөкё° кё°мІҙ м •л ¬ кІҖмӮ¬м—җ мҶҢмҡ”лҗҳлҠ” кІҖмӮ¬м җмқҖ м№ҳкө¬ кё°мӨҖм җкіј мҷёл¶Җ кІҖмӮ¬м җмңјлЎң кө¬л¶„лҗңлӢӨ. м№ҳкө¬ кё°мӨҖм җмқҖ кё°мІҙкө¬мЎ° мЎ°лҰҪ м№ҳкө¬м—җм„ң м •нҷ•н•ң мң„м№ҳк°Җ м •мқҳлҗң кө¬мЎ° мӨ‘м—җм„ң м„ м •н•ҳл©°, мҷёл¶Җ кІҖмӮ¬м җмқҳ мң„м№ҳ м„ м •мқҖ Fig. 8кіј к°ҷмқҙ лҢҖкё°мһҗлЈҢм„јм„ңмқҳ м „л°©кіј нӣ„л°© к°Ғ 1к°ңмҶҢмҷҖ мһҘм°© нҢЁмҠӨл„Ҳ 2к°ңмҶҢлҘј нҸ¬н•Ён•ң мҙқ 4к°ңмҶҢлҘј мёЎм •н•ңлӢӨ. м „л°©кіј нӣ„л°© 2к°ңмҶҢлҘј мқјм§Ғм„ мңјлЎң л§Ңл“Өм–ҙ н”јм№ҳ, мҡ”лҘј мёЎм • н•ҳл©°, мһҘм°© нҢЁмҠӨл„Ҳ 2к°ңмҶҢлҘј мқјм§Ғм„ мңјлЎң л§Ңл“Өм–ҙ лЎӨмқ„ мёЎм •н•ңлӢӨ. мёЎм •лҗң лЎӨ, н”јм№ҳ, мҡ”мқҳ мҳӨм°Ё к°’мқҙ н—Ҳмҡ© мҳӨм°ЁлҘј мҙҲкіјн•ҳм§Җ м•ҠлҠ”м§Җ нҷ•мқён•ҳкі л§Ңм•Ҫ н—Ҳмҡ© мҳӨм°ЁлҘј мҙҲкіјн• кІҪмҡ°, 추к°Җ мҳӨм°Ё л°ңмғқ мӣҗмқёмқ„ нҢҢм•…н•ҳм—¬ лҢҖкё°мһҗлЈҢм„јм„ңмқҳ мЎ°лҰҪмқ„ мҲҳм •н•ңлӢӨ.
3.1.3 м§ҖмғҒмӢңн—ҳ(Ground Test)
лҢҖкё°мһҗлЈҢм„јм„ңмқҳ н•ӯкіөкё° мһҘм°©мқҙ мҷ„лЈҢлҗҳл©ҙ мІҙкі„нҶөн•©мӢңн—ҳмқҳ л§Ҳм§Җл§ү лӢЁкі„мқё м§ҖмғҒмӢңн—ҳмқ„ мҲҳн–үн•ңлӢӨ. м§ҖмғҒмӢңн—ҳм—җм„ңлҠ” н•ӯкіөкё°мҷҖ н•ӯкіөкё° м җкІҖмһҘ비лҘј мң м„ м—°лҸҷн•ҳм—¬ лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ мһҗк°Җ진лӢЁ, нһҲн„° лӘЁл“ң нҶөм ң л“ұкіј к°ҷмқҖ лӢЁмң„ кё°лҠҘлҝҗл§Ң м•„лӢҲлқј мқҙмӨ‘нҷ” м—°лҸҷ, 비мғҒ н•ҙм ңмҷҖ к°ҷмқҖ мІҙкі„ мҡҙмҡ© кё°лҠҘмқҙ мҙқмЎ°лҰҪ мҷ„лЈҢ мғҒнғңм—җм„ң м •мғҒ лҸҷмһ‘н•ҳлҠ”м§ҖлҘј нҷ•мқён•ңлӢӨ. лҳҗн•ң мІҙкі„нҶөн•©мӢӨн—ҳмӢӨмқҳ лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң м „кё°м Ғ м—°лҸҷмқҙ н•ӯкіөкё°мҷҖ мҷ„м „нһҲ лҸҷмқјн•ң кІғмқҖ м•„лӢҲлҜҖлЎң м§ҖмғҒмӢңн—ҳ лӢЁкі„м—җм„ң нҶөмӢ н’Ҳм§Ҳ м җкІҖмқ„ мһ¬мҲҳн–үн•ҳкі мӢӨн—ҳмӢӨ нҷҳкІҪ м җкІҖ лҢҖ비 м°Ёмқҙк°Җ л°ңмғқн•ҳлҠ”м§Җ кІ°кіјлҘј 비көҗн•ңлӢӨ. лҸҷм •м•• мӢңн—ҳмһҘ비лҘј мқҙмҡ©н•ң лҢҖкё°мһҗлЈҢ м¶ңл Ҙ нҷ•мқё мӢңн—ҳ н•ӯлӘ©м—җм„ңлҠ” м җкІҖмһҘ비м—җ мӢңнҳ„лҗҳлҠ” кі лҸ„, мҶҚлҸ„, л°ӣмқҢк°Ғ, мҳҶлҜёлҒ„лҹјк°Ғмқҙ 비н–үм ңм–ҙм»ҙн“Ён„°лҘј нҶөн•ҙ ліҙм •мӢқмқҙ л°ҳмҳҒлҗң кІ°кіјмқҙлҜҖлЎң лі„лҸ„ м җкІҖн‘ңлҘј нҶөн•ҙм„ң нҷ•мқён•ңлӢӨ.
3.2 мІҙкі„мӢңн—ҳ
м§ҖмғҒмӢңн—ҳмқ„ нҶөкіјн•ҳл©ҙ л¬ҙмқён•ӯкіөкё° лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҖ н•ӯкіөкё° мһҘм°© мғҒнғңм—җм„ң м§ҖмғҒ нҷңмҡ© кё°лҠҘ лІ”мң„к№Ңм§Җ кІҖмҰқмқ„ мҷ„лЈҢн•ң мғҒнғңк°Җ лҗңлӢӨ. мІҙкі„мӢңн—ҳ лӢЁкі„м—җм„ңлҠ” нҷңмЈј л°Ҹ 비н–үмӢңн—ҳмқ„ нҶөн•ҙм„ң лҢҖкё°мһҗлЈҢм„јм„ңмқҳ мёЎм • м„ұлҠҘмқҙ мһҘ비 к·ңкІ©м—җм„ң н—Ҳмҡ©н•ҳлҠ” лІ”мң„лҘј 충мЎұн•ҳлҠ”м§ҖлҘј нҷ•мқён•ҳкі ліҙм •мқ„ нҶөн•ҙ мөңмў… мҡҙмҡ© нҳ•мғҒмқ„ нҷ•м •н•ңлӢӨ. лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ лӢЁмң„ л°Ҹ мІҙкі„мҡҙмҡ© кё°лҠҘм—җ лҢҖн•ң лӢЁкі„лі„ кІҖмҰқ н•ӯлӘ©мқ„ м§ҖмғҒмӢңн—ҳкіј 비көҗн•ҳл©ҙ Table 3кіј к°ҷлӢӨ.
TableВ 3.
Air data system verification forsystem test phase
мқјл¶ҖлҠ” мӢӨн—ҳмӢӨ нҷҳкІҪ мӢңн—ҳм Ҳм°ЁмҷҖ лҸҷмқјн•ҳлҚ”лқјлҸ„ н•ӯкіөкё° нҶөн•© мғҒнғңм—җм„ң мөңмў… нҷ•мқён•ңлӢӨ. мІҙкі„мӢңн—ҳм—җм„ңлҠ” мқёмң„м Ғмқё кі мһҘ мЈјмһ…мқҙ м ңн•ңлҗҳкё° л•Ңл¬ём—җ лҢҖл¶Җ분мқҳ мӢңн—ҳ м Ҳм°ЁлҠ” м •мғҒ мҡҙмҡ© мғҒнҷ©м—җм„ңмқҳ кё°ліё кё°лҠҘмқ„ м җкІҖн•ҳкі нҠ№мқҙмӮ¬н•ӯ л°ңмғқ м—¬л¶ҖлҘј нҷ•мқён•ҳлҠ” мҲңм„ңлЎң м •лҰ¬лҗңлӢӨ.
3.2.1 нҷңмЈјмӢңн—ҳ
нҷңмЈјмӢңн—ҳмқҖ м§ҖмғҒм—җм„ң 비н–үмӢңн—ҳ м „ л¬ҙмқён•ӯкіөкё° мӨҖ비 мғҒнғңлҘј мөңмў… м җкІҖн•ҳкё° мң„н•ң лӘ©м ҒмңјлЎң мҲҳн–үлҗҳл©° лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң м „л°ҳм—җ кұёміҗ м •мғҒм Ғмқё мһ‘лҸҷ л°Ҹ кё°лҠҘмқ„ нҷ•мқён•ңлӢӨ. мқҙм „ мӢңн—ҳ лӢЁкі„м—җм„ңлҠ” лҢҖкё°мһҗлЈҢ мёЎм • м„ұлҠҘмқ„ нҷ•мқён•ҳкё° мң„н•ҙ лҸҷм •м•• лӘЁмӮ¬ мһҘ비лҘј мқҙмҡ©н•ҙм•ј н•ҳлҠ” м ңн•ңмӮ¬н•ӯмқҙ мһҲм—ҲмңјлӮҳ, нҷңмЈј мғҒнғңм—җм„ңлҠ” н•ӯкіөкё° лҢҖкё°мһҗлЈҢ мёЎм •к°’м—җ мӢӨм ң көӯл¶Җ мң лҸҷмқҳ нқҗлҰ„мқҙ л°ҳмҳҒлҗңлӢӨ. л”°лқјм„ң нҷңмЈјмӢңн—ҳм—җм„ңлҠ” нҷңмЈјлЎңмқҳ л°”лһҢ мЎ°кұҙкіј м§ҖмғҒ мҶҚлҸ„лҘј мў…н•©н•ҳм—¬ лҢҖкё°мһҗлЈҢ мёЎм •к°’мқҳ л°©н–Ҙ л°Ҹ мҳӨм°Ёк°Җ мҳҲмёЎ лІ”мң„м—җ л¶Җн•©н•ҳлҠ”м§Җ м җкІҖн•ңлӢӨ.
3.2.2 비н–үмӢңн—ҳ
비н–үмӢңн—ҳмқҖ лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң к°ңл°ңмҡ”кө¬лҸ„ 충мЎұм—¬л¶ҖлҘј нҸүк°Җн•ҳлҠ” мөңмў… кІҖмҰқ лӢЁкі„мқҙлӢӨ. мӢңн—ҳкі„нҡҚмқҖ л¬ҙмқён•ӯкіөкё° мҡҙмҡ© лІ”мң„мҷҖ лҢҖкё°мһҗлЈҢ ліҙм •м—җ мҡ”кө¬лҗҳлҠ” н‘ңліё мҲҳлҘј кі л Өн•ҳм—¬ мҲҳлҰҪн•ңлӢӨ. мөңмҙҲм•Ҳм „л№„н–үм—җм„ңлҠ” мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңлҘј кё°мӨҖмңјлЎң 비н–үмқ„ мҲҳн–үн•ҳкі мЎ°мў…м„ұмқ„ нҸүк°Җн•ҳкё° мң„н•ң к°Ғмў… кё°лҸҷмқ„ мҲҳн–үн•ҳлҠ” лҸҷм•Ҳ м•Ҳм „м¶”м Ғкё°лҘј нҶөн•ҙ нҠ№мқҙмӮ¬н•ӯ л°ңмғқ м—¬л¶ҖлҘј м җкІҖн•ҳлҸ„лЎқ н•ңлӢӨ.
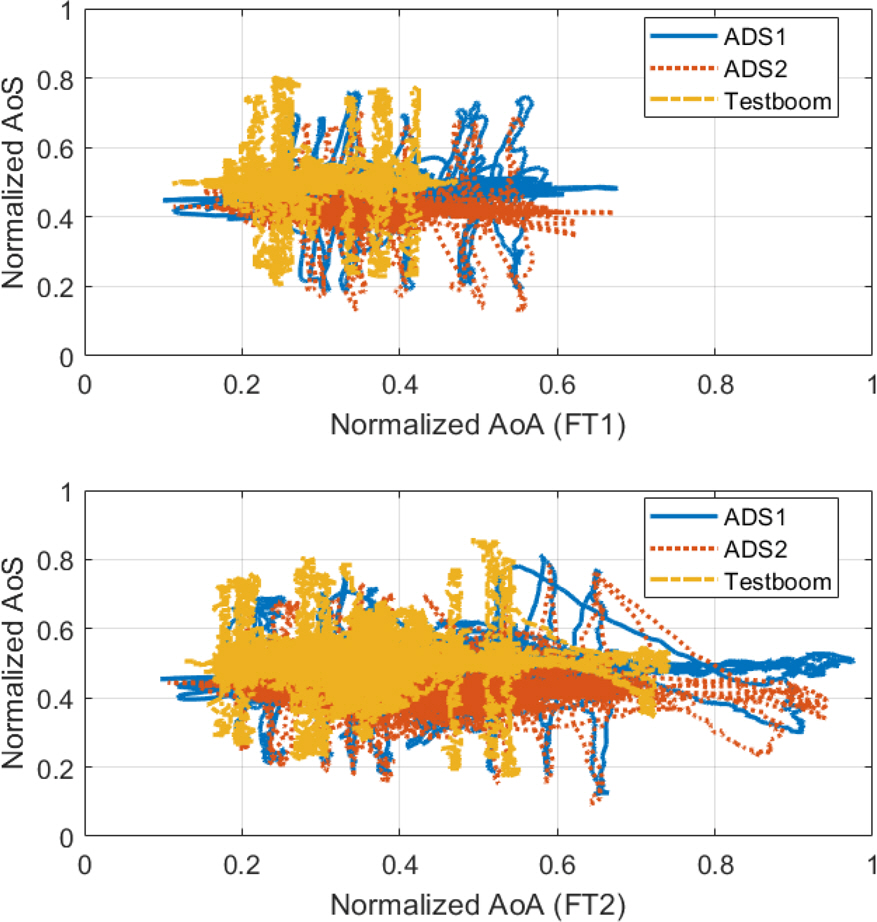

ліё м—°кө¬м—җм„ңлҠ” 2нҡҢмқҳ мөңмҙҲм•Ҳм „л№„н–ү лҸҷм•Ҳ Figs. 9вҖ“10кіј к°ҷмқҙ 비н–ү мҳҒм—ӯмқ„ нҷ•мһҘн•ҳл©ҙм„ң лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ кё°лҠҘ л°Ҹ м„ұлҠҘмқ„ нҸүк°Җн•ҳмҳҖлӢӨ. м–‘мӮ°мҡ© лҢҖкё°мһҗлЈҢм„јм„ңм—җ лҢҖн•ҙм„ңлҠ” 비н–үм ңм–ҙм»ҙн“Ён„° м—°мӮ°мқ„ нҶөн•ҙ м „мӮ°мң мІҙн•ҙм„қ мқ„ нҶөн•ң мң„м№ҳмҳӨм°Ё ліҙм •мқ„ мҡ°м„ л°ҳмҳҒн•ҳмҳҖлӢӨ. мӢңн—ҳ кІ°кіј м „ 비н–үкө¬к°„м—җм„ң мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ң м¶ңл Ҙ лҢҖ비 м–‘мӮ°мҡ© лҢҖкё°мһҗлЈҢм„јм„ңмқҳ кі лҸ„ л°Ҹ мҳҶлҜёлҒ„лҹјк°ҒмқҖ нҺём°Ёк°Җ н—Ҳмҡ© мҲҳмӨҖ мқҙлӮҙмһ„мқ„ нҷ•мқён•ҳмҳҖлӢӨ. мҶҚлҸ„ л°Ҹ л°ӣмқҢк°Ғмқҳ кІҪмҡ° м–‘мӮ°мҡ© лҢҖкё°мһҗлЈҢм„јм„ңк°Җ мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңліҙлӢӨ мқјм • 비мңЁ лҶ’кІҢ мёЎм •лҗң кІғмқ„ ліј мҲҳ мһҲлӢӨ. лӢ№мӢң м•Ҳм „м¶”м Ғкё°мқҳ мҶҚлҸ„ 추종мқ„ нҶөн•ҙм„ң н•ҙлӢ№ мҳӨм°ЁлҠ” мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңм—җм„ң л°ңмғқн•ҳлҠ” мң„м№ҳ мҳӨм°Ёмһ„мқ„ нҷ•мқён•ҳмҳҖмңјл©°, л°ӣмқҢк°Ғмқҳ кІҪмҡ° мҲҳнҸү비н–ү мӢң н”јм№ҳ мһҗм„ёк№Ңм§Җ 비көҗн•ң кІ°кіј мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңлҘј кё°мӨҖмңјлЎң м–‘мӮ°мҡ© лҢҖкё°мһҗлЈҢм„јм„ңмқҳ л°ӣмқҢк°Ғм—җ лҢҖн•ң ліҙм •мқҙ н•„мҡ”н•Ёмқ„ мӢқлі„н•ҳмҳҖлӢӨ.
3.3 ліҙм • л°Ҹ мҡҙмҡ©
лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ м¶ңл Ҙк°’мқҖ 비н–үм ңм–ҙм»ҙн“Ён„°м—җм„ң ліҙм •мқ„ м Ғмҡ©н•ҳм—¬ мһҘм°© мң„м№ҳм—җ л”°лҘё көӯл¶Җ мң лҸҷ мҳҒн–Ҙм„ұмқ„ ліҙмғҒн•ҙм•ј н•ңлӢӨ. мҡҙмҡ© м Ғн•©м„ұмқ„ мөңмў… нҢҗлӢЁн•ҳкё° мң„н•ҙм„ңлҠ” 비н–үмӢңн—ҳ кІ°кіјлҘј 분м„қн•ҳм—¬ н’ҚлҸҷмӢңн—ҳ лҳҗлҠ” м „мӮ°мң мІҙн•ҙм„қмңјлЎңл¶Җн„° мӮ°м¶ңлҗң м–‘мӮ°мҡ© лҢҖкё°мһҗлЈҢм„јм„ңмқҳ ліҙм • кІ°кіјк°Җ мҡҙмҡ©м—җ м Ғн•©н•ңм§ҖлҘј нҸүк°Җн•ҳлҠ” кіјм •мқҙ мҡ”кө¬лҗңлӢӨ. ліҙм •м—җ мӮ¬мҡ©лҗҳлҠ” нҢҢлқјлҜён„°лҠ” мҶҚлҸ„, кі лҸ„, л°ӣмқҢк°Ғ, мҳҶлҜёлҒ„лҹјк°Ғ, м°©лҘҷмһҘм№ҳ нҳ•мғҒ, н”Ңлһ© нҳ•мғҒмқ„ нҸ¬н•Ён•ҳкі мһҲмңјл©° 비н–ү мЎ°кұҙ лҢҖ비 көӯл¶Җ мң лҸҷ нҠ№м„ұмқ„ 분м„қн•ҳм—¬ ліҙм • н…Ңмқҙлё”мқ„ кө¬м„ұн•ңлӢӨ. 비н–үмӢңн—ҳмқ„ кұ°л“ӯн•ҳм—¬ 축м Ғлҗң мһҗлЈҢлҠ” ліҙм • н…Ңмқҙлё”мқ„ мөңмў… нҷ•м •н•ҳкё° мң„н•ң кё°л°ҳ мһҗлЈҢлЎң нҷңмҡ©лҗңлӢӨ.
ліё м—°кө¬м—җм„ңлҠ” 추к°Җ ліҙм • м—¬л¶ҖлҘј нҢҗм •н•ҳлҠ” кё°мӨҖмңјлЎң мҙқ 3к°Җм§Җ л°©мӢқмқ„ м Ғмҡ©н•ҳмҳҖлӢӨ. мІ« лІҲм§ёлҠ” м•Ҳм „м¶”м Ғкё°лҘј нҷңмҡ©н•ҳлҠ” л°©лІ•мңјлЎң л¬ҙмқён•ӯкіөкё°мҷҖ м•Ҳм „м¶”м Ғкё°к°Җ лҸҷмӢңм—җ 비н–үн•ҳл©ҙм„ң кі лҸ„ л°Ҹ мҶҚлҸ„лҘј лҸҷкё°нҷ”н•ҳлҠ” л°©мӢқмқҙлӢӨ. м•Ҳм „м¶”м Ғкё°мқҳ лҢҖкё°мһҗлЈҢ м¶ңл ҘмқҖ мӮ¬м „м—җ ліҙм •мқҙ мҷ„лЈҢлҗң мғҒнғңмқҙлҜҖлЎң 비н–үмқ„ мҲҳн–үн•ҳл©ҙм„ң кі лҸ„ л°Ҹ мҶҚлҸ„м—җ лҢҖн•ҙ л¬ҙмқён•ӯкіөкё° лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҳ м •нҷ•лҸ„лҘј л°”лЎң нҷ•мқён• мҲҳ мһҲлӢӨлҠ” мһҘм җмқ„ к°–лҠ”лӢӨ. ліё м—°кө¬мқҳ мөңмҙҲм•Ҳм „л№„н–үм—җм„ңлҠ” м•Ҳм „м¶”м Ғкё°мқҳ кі лҸ„ л°Ҹ мҶҚлҸ„ 추종мқ„ нҶөн•ҙ мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңмқҳ кі лҸ„лҠ” м •нҷ•н•ҳкІҢ мёЎм •лҗҳлӮҳ мҶҚлҸ„лҠ” кі„мҶҚ лӮ®кІҢ мёЎм •лҗЁмқ„ мҡҙмҡ© мӨ‘ нҷ•мқён•ҳмҳҖлӢӨ.
л‘җ лІҲм§ё л°©мӢқмқҖ мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ң лҢҖ비 м–‘мӮ°мҡ© лҢҖкё°мһҗлЈҢм„јм„ңмқҳ нҺём°ЁлҘј мӮ¬нӣ„ 분м„қн•ҳлҠ” л°©мӢқмқҙлӢӨ. мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңлҠ” н•ӯкіөкё°мқҳ мң„м№ҳлі„ м••л ҘмҳӨм°Ё 분нҸ¬к°Җ мһҗмң нқҗлҰ„м—җ к°ҖмһҘ к°Җк№Ңмҡҙ кё°мҲҳ м „л°©м—җ мһҘм°©лҗҳкё° л•Ңл¬ём—җ н•ҙлӢ№ лҢҖкё°мһҗлЈҢ мёЎм •к°’мқ„ кё°мӨҖмңјлЎң м–‘мӮ°мҡ© лҢҖкё°мһҗ лЈҢм„јм„ң мёЎм •м№ҳлҘј 비көҗн• мҲҳ мһҲлӢӨ. м „ кө¬к°„м—җм„ң 비көҗ мһҗлЈҢк°Җ нҡҚл“қлҗҳкё° л•Ңл¬ём—җ м•Ҳм „м¶”м Ғкё°лЎң нҷ•ліҙн•ҳкё° м–ҙл Өмҡҙ мҡҙмҡ© кө¬к°„м—җм„ңлҸ„ мһҗлЈҢк°Җ нҷ•ліҙлҗ лҝҗл§Ң м•„лӢҲлқј м°©лҘҷмһҘм№ҳ л°Ҹ н”Ңлһ©м—җ мқҳн•ң мҳҒн–Ҙм„ұмқ„ 분м„қн•ҳм—¬ лҢҖкё°мһҗлЈҢ ліҙм •н‘ңм—җ л°ҳмҳҒн•ҳкё° мҡ©мқҙн•ҳлӢӨлҠ” мһҘм җмқҙ мһҲлӢӨ.
л§Ҳм§Җл§ү л°©мӢқмқҖ GPS кё°л°ҳ мң„м№ҳмҳӨм°Ё ліҙм • кё°лІ•мқ„ нҶөн•ҙ лҢҖкё°мҶҚлҸ„ мёЎм •к°’мқ„ 분м„қн•ҳлҠ” кІғмқҙлӢӨ. мқҙ л°©мӢқмқҖ мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ң кё°мӨҖ мқјм •н•ң лҢҖкё°мҶҚлҸ„лЎң мҲҳнҸү м„ нҡҢн•ҳл©ҙм„ң лҢҖкё°мһҗлЈҢм„јм„ң л°Ҹ GPS м¶ңл Ҙмқ„ нҡҚл“қн•ҳл©ҙ, лӢӨм–‘н•ң л°©мң„к°Ғм—җм„ңмқҳ м§Җл©ҙ мҶҚлҸ„мқҳ ліҖнҷ”лҘј 분м„қн•ЁмңјлЎңмҚЁ 진лҢҖкё°мҶҚлҸ„мҷҖ л°”лһҢ м„ұ분мқ„ 추м¶ңн• мҲҳ мһҲкІҢ лҗңлӢӨ[16]. ліё м—°кө¬м—җм„ңлҠ” Fig. 11кіј к°ҷмқҙ кі мҶҚ л°Ҹ м ҖмҶҚ мЎ°кұҙ м„ нҡҢ кё°лҸҷмқ„ мҲҳн–үн•ҳмҳҖмңјл©°, к°Ғ мЎ°кұҙм—җм„ңмқҳ лҢҖкё°мҶҚлҸ„ л°Ҹ л°”лһҢ м •ліҙлҠ” Table 4мҷҖ к°ҷмқҙ 분м„қлҗҳм–ҙ мӢңн—ҳмҡ© лҢҖкё°мһҗлЈҢм„јм„ңмқҳ мҶҚлҸ„ ліҙм •м—җ л°ҳмҳҒн•ҳмҳҖлӢӨ.

TableВ 4.
Position error correction results
м–‘мӮ°мҡ© лҢҖкё°мһҗлЈҢм„јм„ңмқҳ мң„м№ҳмҳӨм°Ё ліҙм •мқҖ м „мӮ°мң мІҙн•ҙм„қмңјлЎңл¶Җн„° мӮ°м¶ңлҗң ліҙм •мқ„ кё°л°ҳмңјлЎң 비н–үмӢңн—ҳмқ„ нҶөн•ҙ мғҒкё° 3к°Җм§Җ л°©мӢқмңјлЎң мӢқлі„лҗң 추к°Җ мҳӨм°ЁлҘј мҲңлһҢн‘ң(Look-up table) нҳ•нғңлЎң ліҙм •мӢқм—җ л°ҳмҳҒн•ҳм—¬ мөңмў… нҷ•м •н•ңлӢӨ.
кІ° лЎ
л¬ҙмқён•ӯкіөкё° лҢҖкё°мһҗлЈҢмӢңмҠӨн…ңмқҖ 비н–ү н•„мҲҳ мҡ”мҶҢлЎңм„ңмқҳ мҲҳмӨҖ лҶ’мқҖ мӢ лў°м„ұмқ„ ліҙмһҘн•ҳл©ҙм„ң к°ңл°ң кё°к°„кіј 비мҡ©мқҖ мӨ„м—¬лӮҳк°Җм•ј н•ҳлҠ” лӢ№л©ҙ кіјм ңлҘј м•Ҳкі мһҲлӢӨ. ліё л…јл¬ём—җм„ңлҠ” мқҙлҹ¬н•ң мҡ”кө¬лҘј л§ҢмЎұмӢңнӮӨкё° мң„н•ҙм„ң мқҙмӨ‘нҷ” лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң мғҒм„ём„Өкі„лҘј м ңм•Ҳн•ҳкі мқҙм—җ м Ғн•©н•ң лӢЁкі„лі„ кІҖмҰқ м Ҳм°ЁлҘј м •лҰҪн•ҳмҳҖмңјл©° м Ғмҡ© мӮ¬лЎҖлЎңл¶Җн„° м ңмӢңлҗң л°©м•Ҳм—җ лҢҖн•ң мң нҡЁм„ұмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
м°Ёкё° л¬ҙмқён•ӯкіөкё° лҢҖкё°мһҗлЈҢмӢңмҠӨн…ң к°ңл°ң мӢң лҢҖмғҒ н•ӯкіөкё°мқҳ нҠ№м„ұмқ„ кі л Өн•ҳм—¬ м„ёл¶Җм Ғмқё м„Өкі„ ліҙмҷ„мқҙ н•„мҡ”н• кІғмқҙлӮҳ ліё м—°кө¬ кІ°кіјлҘј нҶөн•ҙ кё°ліём Ғмқё м„ұлҠҘ л°Ҹ мӢ лў°м„ұ мҡ”кө¬лҸ„м—җ л¶Җн•©н•ҳлҠ” м„Өкі„м•Ҳмқ„ мӢ мҶҚн•ҳкІҢ л§Ҳл Ён• мҲҳ мһҲмқ„ лҝҗл§Ң м•„лӢҲлқј нҶөн•© кіјм •м—җм„ң мӢңн–үмҳӨм°ЁлҘј л°©м§Җн•ЁмңјлЎңмҚЁ к°ңл°ң кё°к°„ лӢЁм¶•кіј 비мҡ© м Ҳк°җмқҙлқјлҠ” нҡЁкіјлҘј лӢ¬м„ұн• мҲҳ мһҲмқ„ кІғмңјлЎң кё°лҢҖлҗңлӢӨ.




