



м„ң лЎ
IFF(Identification Friend or Foe)лқјкі л¶ҲлҰ¬лҠ” н”јм•„мӢқ лі„мқҖ м§ҖмғҒ, н•ҙмғҒ, кіөмӨ‘м „м—җм„ң нғҗмғү л ҲмқҙлӢӨмқҳ нғҗм§ҖнҢҗлӢЁмқ„ лҸ„мҷҖ м Ғкө°мқём§Җ м•„кө°мқём§ҖлҘј мһҗлҸҷмңјлЎң мӢқлі„н•ҳлҠ” мӨ‘мҡ”н•ң кё°лҠҘмқҙлӢӨ. мқҙл ҮкІҢ н”јм•„лҘј мӢқлі„н•ҳкё° мң„н•ҙ н”јм•„мӢқлі„ л ҲмқҙлӢӨлҠ” м§Ҳл¬ё мӢ нҳёлҘј н‘ңм Ғкё°м—җ мҶЎмӢ н•ҳкі , н‘ңм Ғкё°лЎңл¶Җн„° мҲҳмӢ н•ң мқ‘лӢө мӢ нҳёлҘј мІҳлҰ¬н•ҳлҠ” нҶөмӢ мӢңмҠӨн…ңмңјлЎң кө¬м„ұлҗңлӢӨ. мӢӨм ң н•ӯкіөкё°мқҳ кІҪмҡ° к°Ғ кё°мў… лі„лЎң кі мң мӢқлі„ мҪ”л“ңк°Җ л¶Җм—¬лҗҳм–ҙ мһҲм–ҙ л ҲмқҙлӢӨк°Җ мӢӨмӢңк°„мңјлЎң мҶЎмҲҳмӢ н•ҳм—¬ кҙҖлҰ¬н• мҲҳ мһҲлӢӨ.
нҳ„лҢҖм „м—җм„ңлҠ” м „мһҘ нҷҳкІҪмқҳ лІ”мң„к°Җ л„“м–ҙм§Җкі н‘ңм Ғкё°к°Җ мҶҢнҳ•нҷ” л°Ҹ кі мҶҚнҷ” лҗҳлҠ” 추세мқҙкё° л•Ңл¬ём—җ м§ҖмғҒм—җм„ң м•„кө° л°Ҹ лҜјк°„ н•ӯкіөкё°лҘј ліҙнҳён•ҳкі кҙҖлҰ¬н•ҳлҠ” н”јм•„мӢқлі„ л ҲмқҙлӢӨ лҳҗн•ң л°ңм „н•ҳлҠ” 추세мқҙлӢӨ. нҠ№нһҲ мҡ°лҰ¬лӮҳлқјм—җм„ңлҠ” кіјкұ°мқҳ н”јм•„мӢқлі„ лӘЁл“ң мҡҙмҡ© мІҙм ңм—җм„ң л°ңм „н•ҙ лҚ”мҡұ л№ лҘё мқ‘лӢөм„ұмқ„ мң„н•ң мһ¬м •лҰҪмқҙ н•„мҡ”н•ң мғҒнҷ©м—җм„ң мғҲлЎңмҡҙ лӘЁл“ң лҸ„мһ…м—җ л”°лҘё н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ м„ұлҠҘ 분м„қмқҙ н•„мҡ”н•ң мӢӨм •мқҙлӢӨ. н•ҳм§Җл§Ң н”јм•„мӢқлі„ лӘЁл“ңм—җ лҢҖн•ҙ мӢӨм ң 비н–үмӢңн—ҳмқ„ нҶөн•ң м„ұлҠҘ 분м„қмқҖ мӢңк°„кіј 비мҡ©мқҙ л§Һмқҙ л“Өкё° л•Ңл¬ём—җ м•Ҳн…ҢлӮҳ л№” нҢЁн„ҙ, мҡҙмҡ© л“ұм—җ лҢҖн•ң к°ңл°ң лӢЁкі„м—җм„ңмқҳ мӮ¬м „ 분м„қмқҙ н•„мҡ”н•ҳлӢӨ. мқҙлҹ¬н•ң мӮ¬м „ 분м„қмқҖ н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ м„ұлҠҘ мҳҲмёЎ л°Ҹ лӘЁл“ң мҡҙмҡ©м—җ л”°лҘё м „нҲ¬мІҙкі„м—җм„ңмқҳ м Ғн•©м„ұ нҢҗлӢЁмқ„ мң„н•ҙ M&SлҘј нҶөн•ҙ мҲҳн–үн• мҲҳ мһҲлӢӨ. н”јм•„ мӢқлі„мқҳ м§Ҳл¬ёкіј мқ‘лӢө мӢ нҳёлҠ” м „нҢҢлҘј нҶөн•ҙ м „лӢ¬лҗҳкё° л•Ңл¬ём—җ н”јм•„мӢқлі„мқ„ м „нҢҢ кҙҖм җм—җм„ң 분м„қн• н•„мҡ”к°Җ мһҲлӢӨ.
ліё л…јл¬ём—җм„ңлҠ” л ҲмқҙлӢӨ кё°мӨҖ 진мһ…/нҮҙк°Ғ л°©н–ҘмңјлЎң мӢӨм ң н‘ңм Ғкё°мқҳ кё°лҸҷ мӢңлӮҳлҰ¬мҳӨлҘј л°”нғ•мңјлЎң мІҙкі„ м„ұлҠҘмқ„ мҳҲмёЎн•ҳкі л¶„м„қн•ҳкё° мң„н•ҙ M&SлҸ„кө¬лҘј к°ңл°ңн•ҳмҳҖлӢӨ. н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ нғҗм§Җ м„ұкіөмқҖ лӘЁл“ң мҡҙмҡ©, кө¬лҸҷ л“ұмқҳ кё°мҲ м Ғ мҡ”мҶҢмҷҖ л ҲмқҙлӢӨ мң„м№ҳ, лҢҖкё°мғҒнғң, н‘ңм Ғ кё°лҸҷ л“ұмқҳ мҡҙмҡ© нҷҳкІҪм—җ л”°лқј ліҖнҷ”н•ҳлҠ” мқ‘лӢөмӢ нҳё м„ёкё°лҘј кі„мӮ°н•ҳкі мқҙлҘј м§Ҳл¬ёкё° мһ…мһҘм—җм„ң мһ„кі„м№ҳлҘј л„ҳлҠ” кІҪмҡ°лЎң м •мқҳн•ҳмҳҖлӢӨ. мқҙ л•Ң лҢҖкё°мғҒнғң л°Ҹ м§Җнҳ•мқҖ н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ м„ұлҠҘм—җ мһҲм–ҙ нҒ° мҶҗмӢӨмқ„ мң л°ңн•ңлӢӨ. нҠ№нһҲ м§ҖмғҒм—җ кі м •лҗң л ҲмқҙлӢӨмқҳ кІҪмҡ° лҢҖкё°м—җ л”°лҘё көҙм ҲлҘ лҝҗл§Ң м•„лӢҲлқј м§Җнҳ•м—җ л”°лҘё лӢӨмӨ‘кІҪлЎң мҶҗмӢӨмқҙ л°ңмғқн•ҳл©ҙ м§Җнҳ•м—җ мқҳн•ң м°ЁнҸҗкө¬м—ӯмқҙ нҳ•м„ұлҗҳм–ҙ м§Ҳл¬ёкё° мӢ нҳёк°Җ н‘ңм Ғкё°м—җ лҸ„лӢ¬н•ҳм§Җ лӘ»н•ҳлҠ” кІҪмҡ°к°Җ л°ңмғқн•ҳкё° л•Ңл¬ём—җ м „нҢҢмӢ нҳё м•Ҫм„ёлЎң мқ‘лӢөкё°к°Җ м§Ҳл¬ё мӢ нҳёлҘј л°ӣм§Җ лӘ»н•ҳкұ°лӮҳ мһҳлӘ»лҗң м •ліҙк°Җ лҸ„лӢ¬н• мҲҳ мһҲлӢӨ. л”°лқјм„ң н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ м„ұлҠҘ мҳҲмёЎ л°Ҹ 분м„қм—җ мһҲм–ҙ мҡҙмҡ©нҷҳкІҪмқ„ л°ҳмҳҒн•ң м „нҢҢ 분м„қмқҙ мӨ‘мҡ”н•ҳлӢӨ.
л”°лқјм„ң ліё л…јл¬ём—җм„ңлҠ” лӘЁл“ң мҡҙмҡ©м—җ л”°лқј мӢңк°„мһҗмӣҗмқ„ л°ҳмҳҒн•ң л ҲмқҙлӢӨ лӘЁлҚёкіј н‘ңм Ғкё°мқҳ кё°лҸҷлӘЁлҚёмқ„ кө¬м„ұн•ҳкі , лҢҖкё°нҷҳкІҪ л°Ҹ м§Җнҳ•м •ліҙлҘј л°ҳмҳҒн•ң мҡҙмҡ©нҷҳкІҪ лӘЁлҚёкіј нҶөн•©н•ҳм—¬ M&SлҸ„кө¬лҘј к°ңл°ңн•ҳмҳҖлӢӨ. мқҙлҘј нҶөн•ҙ м§ҖмғҒм—җ кі м •лҗң н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ лҸҷм Ғмқё мҡҙмҡ©м„ұлҠҘмқ„ мҳҲмёЎн•ҳкі мӢӨм ң л ҲмқҙлӢӨ мёЎм • лҚ°мқҙн„°мҷҖ 비көҗ분м„қмқ„ нҶөн•ҳм—¬ M&SлҸ„кө¬мқҳ кІҖмҰқмқ„ мҲҳн–үн•ҳмҳҖлӢӨ.
лӘЁлҚё кө¬м„ұ
н”јм•„мӢқлі„ л ҲмқҙлӢӨлҠ” м „нҢҢ лҳҗлҠ” мқҢнҢҢлЎң м§Ҳл¬ёмӢ нҳёлҘј мҶЎмӢ н•ҳкі к·ё мӢ нҳёлҘј к°җм§Җн•ң м•„кө° н‘ңм Ғкё°м—җм„ң мһҗлҸҷмңјлЎң мқ‘лӢөмӢ нҳёлҘј ліҙлғ„мңјлЎңмҚЁ мһ¬мҲҳмӢ н•ҳм—¬ м•„кө°мқ„ мӢқлі„н•ҳлҠ” кё°лҠҘмқ„ мҲҳн–үн•ңлӢӨ. мӢӨм ң лҜј/кө°мҡ©кё°м—җлҠ” к°Ғк°Ғмқҳ кі мң мӢқлі„мҪ”л“ңк°Җ л¶Җм—¬лҗҳм–ҙ мһҲм–ҙ, н”јм•„мӢқлі„ л ҲмқҙлӢӨк°Җ нҸ¬м°©н•ң лҚ°мқҙн„°лҠ” MCRC(Master Control and Reporting Center, мӨ‘м•ҷл°©кіөнҶөм ңмҶҢ)лЎң мҶЎл¶ҖлҗңлӢӨ. MCRCм—җм„ңлҠ” н”јм•„мӢқлі„ л ҲмқҙлӢӨлЎңл¶Җн„° мҲҳмӢ н•ң лӢӨмҲҳмқҳ лҚ°мқҙн„°лҘј мңөн•©н•ҳм—¬ н‘ңм Ғмқ„ нҢҗлӢЁ л°Ҹ кҙҖлҰ¬н•ҳкІҢ лҗңлӢӨ. мқҙ л•Ң мЈјнҢҢмҲҳ, мҡҙмҡ©лӘЁл“ң, м•”нҳёнҷ”лҗң мҪ”л“ңлЎңл¶Җн„° ліҙмң лҰ¬мҠӨнҠёмҷҖ мқјм№ҳн•ҳлҠ” кІҪмҡ° м•„кө°кё°лқјкі нҢҗлӢЁн•ҳкі , лӮҳлЁём§Җ лҚ°мқҙн„°лҠ” н•ӯм Ғ лҳҗлҠ” кё°лҸҷмқ„ 분м„қн•ҳм—¬ 비н–ү кі„нҡҚм„ңмҷҖ 비көҗн•ҳм—¬ м—Ҷмқ„ мӢң м Ғкө°кё°лЎң нҢҗлӢЁн•ҳкІҢ лҗңлӢӨ.
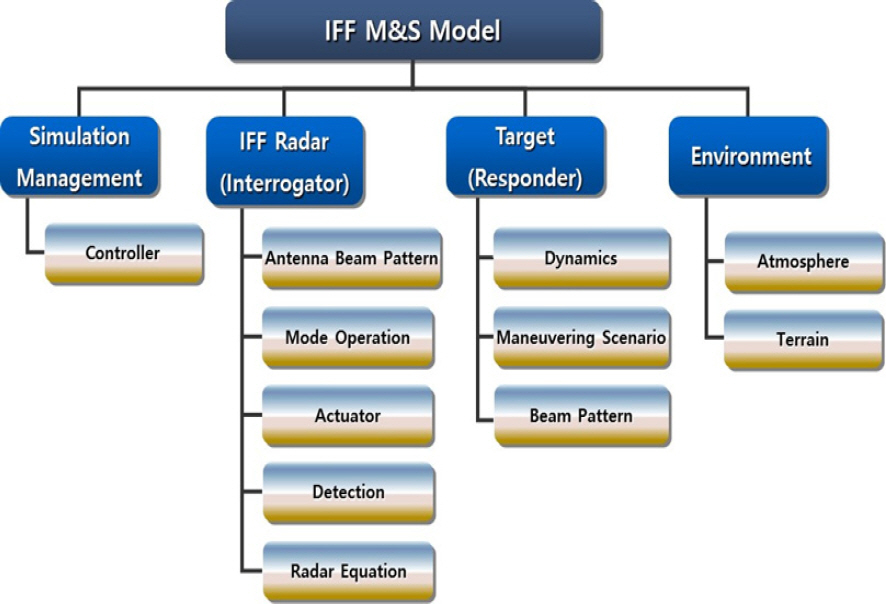
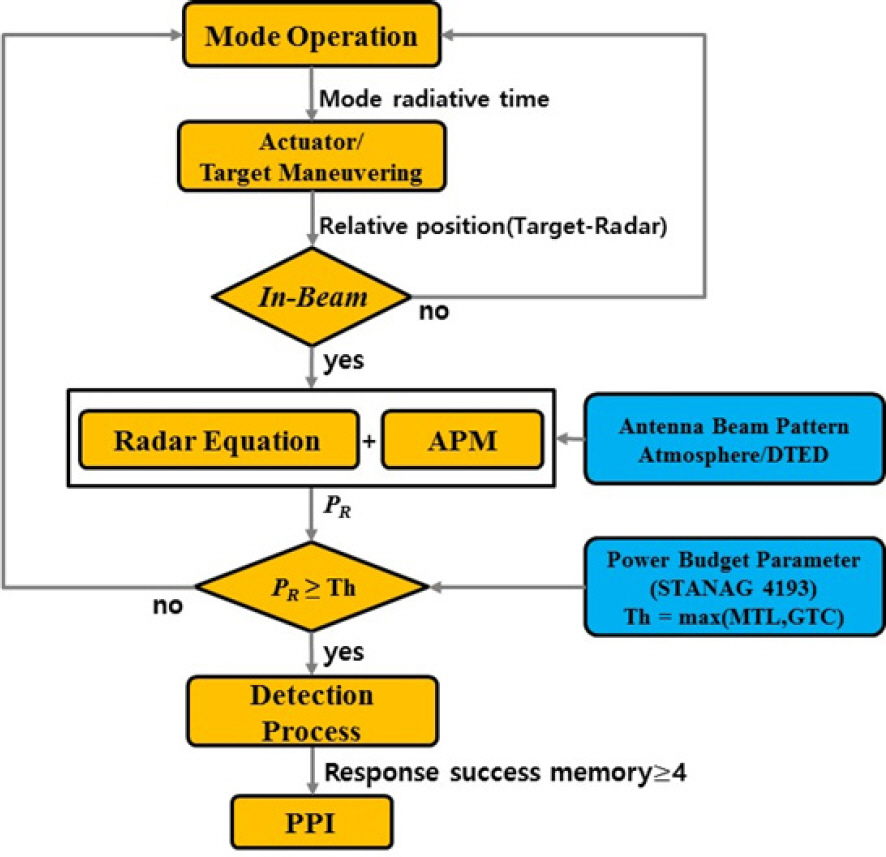
мӢӨм ң мҡҙмҡ©нҠ№м„ұмқ„ кі л Өн•ҳм—¬ M&S лӘЁлҚёмқҖ Fig. 1кіј к°ҷмқҙ нҒ¬кІҢ н”јм•„мӢқлі„ л ҲмқҙлӢӨ м§Ҳл¬ёкё°мҷҖ н‘ңм Ғкё°мқҳ мқ‘лӢөкё°, мӢңлӮҳлҰ¬мҳӨм—җ л”°лҘё н‘ңм Ғкё° мҡҙлҸҷ лӘЁлҚёкіј мҡҙмҡ©нҷҳкІҪ лӘЁлҚёлЎң кө¬м„ұн•ҳмҳҖлӢӨ. н”јм•„мӢқлі„ л ҲмқҙлӢӨ м§Ҳл¬ёкё° лӘЁлҚёмқҳ кІҪмҡ° л№” нҢЁн„ҙ, мҡҙмҡ© лӘЁл“ң, кө¬лҸҷмңјлЎң кө¬м„ұлҗҳм–ҙ лӘЁл“ң мҡҙмҡ©м—җ л”°лҘё нғҗм§Җм„ұлҠҘ ліҖнҷ”лҘј л°ҳмҳҒн• мҲҳ мһҲлҸ„лЎқ н•ҳмҳҖлӢӨ. н‘ңм Ғкё° мҡҙлҸҷ лӘЁлҚёмқҖ мҷёлһҖ м—Ҷмқҙ м§Ғ진 кё°лҸҷмқ„ н•ҳлҸ„лЎқ кө¬м„ұ н•ҳмҳҖлӢӨ. н‘ңм Ғкё° мқ‘лӢөкё°мқҳ кІҪмҡ° л¬ҙм§Җн–Ҙм„ұ л№” нҢЁн„ҙмңјлЎң к°Җм •н•ҳм—¬ л°ҳмҳҒн•ҳмҳҖмңјл©°, мҡҙмҡ©нҷҳкІҪм—җ л”°лҘё лҢҖкё° мҶҗмӢӨмқҖ APM(Advanced Propagation Model) лӘЁлҚёмқ„ мӮ¬мҡ©н•ҳмҳҖлӢӨ. к°Ғ лӘЁлҚёлі„ мғҒм„ё м„ӨлӘ…мқҖ м•„лһҳмҷҖ к°ҷлӢӨ.
2.1 м§Ҳл¬ёкё° лӘЁлҚё
ліё л…јл¬ём—җм„ң лӘЁмқҳн•ҳлҠ” м§Ҳл¬ёкё° лӘЁлҚёмқҖ н”јм•„мӢқлі„ л ҲмқҙлӢӨ лӘЁлҚёлЎң мҶЎ/мҲҳмӢ мЈјнҢҢмҲҳмҷҖ м•Ҳн…ҢлӮҳ л№” нҢЁн„ҙмңјлЎң мқҙ лЈЁм–ҙм ё мһҲмңјл©°, Fig. 2мҷҖ к°ҷмқҙ м§Ҳл¬ёкё°м—җм„ң мҶЎмӢ лҗң мӢ нҳёлҠ” м „нҢҢ нҷҳкІҪм—җ л”°лқј мҲҳмӢ мӢ нҳёк°Җ к°җмҮ„лҗҳм–ҙ н‘ңм Ғкё°м—җ мҲҳмӢ лҗңлӢӨ. мқҙл•Ң м§Ҳл¬ёкё°мқҳ лӘЁл“ңлҠ” 1, 2, 3/A, CмҷҖ S лӘЁл“ңлҘј мӮ¬мҡ©н•ҳл©° лӘЁл“ңм—җ л”°лҘё мқ‘лӢөкё°мқҳ мқ‘лӢөм—¬л¶Җк°ҖкІ°м •лҗҳкі мқҙлҠ” н”јм•„мӢқлі„мһҘм№ҳмқҳ нғҗм§Җм„ұлҠҘм—җ л°ҳмҳҒлҗңлӢӨ. к°Ғ лӘЁл“ңлі„ м ңкіө м •ліҙлҠ” м•„лһҳ Table 1кіј к°ҷлӢӨ[1,2]. лӘЁл“ң1, 2, 4лҠ” кө°мҡ©кё° м „мҡ© н”јм•„мӢқлі„ лӘЁл“ңлЎң лӘЁл“ң 1мқҖ л¶ҖлҢҖ мӢқлі„лІҲнҳёлӮҳ мһ„л¬ҙлІҲнҳёк°Җ л¶Җм—¬лҗңлӢӨ. лӘЁл“ң 2лҠ” мЈјлЎңкө°мҡ©кё°мқҳ кё°мў… лІҲнҳёлҘј лӮҳнғҖлӮҙкі , лӘЁл“ң 4лҠ” н”јм•„мӢқлі„мқ„мң„н•ң м •ліҙлЎң м•”нҳёнҷ”лҗң мҪ”л“ңмқҙлӢӨ. лӘЁл“ң 3/AлҠ” кҙҖм ңмӮ¬к°Җл¶Җм—¬н•ҳлҠ” кө°мҡ©кё°лӮҳ лҜјн•ӯкё°мқҳ 비н–үм—җ н•„мҡ”н•ң кі мң лІҲнҳёмқҙкі , лӘЁл“ң CлҠ” н•ӯкіөкё° кі лҸ„, лӘЁл“ң SлҠ” лҚ°мқҙн„° л§ҒнҒ¬лҘјмң„н•ң GPS мң„м№ҳлӮҳ м„ нғқм Ғ л¬ёмқҳм—җ мқ‘лӢөн•ҳкё° мң„н•ң м•”нҳёмҪ”л“ңлҘј нҸ¬н•Ён•ңлӢӨ.

TableВ 1.
Type of IFF mode
2.1.1 л№” мҡҙмҡ©лӘЁлҚё
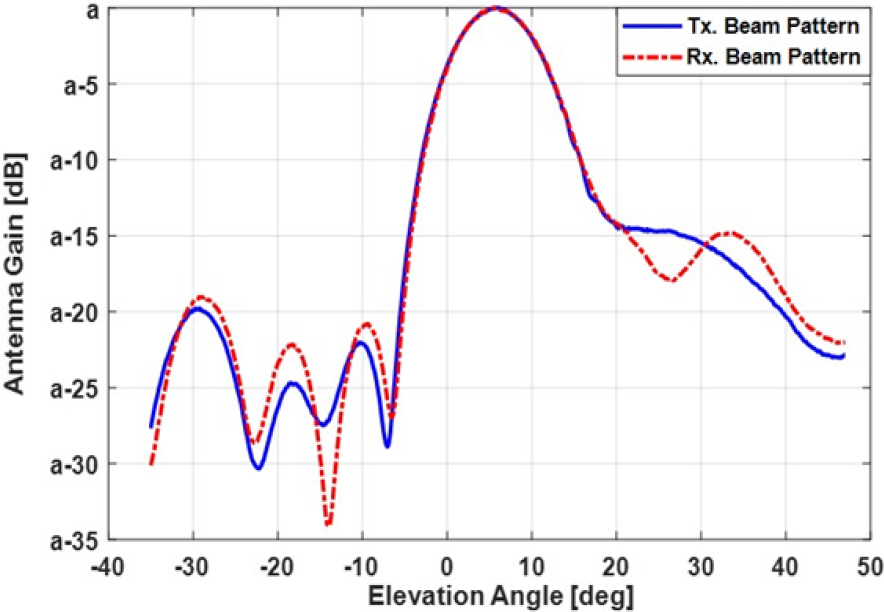
ліё л…јл¬ём—җм„ң н”јм•„мӢқлі„ л ҲмқҙлӢӨ мҶЎ/мҲҳмӢ мЈјнҢҢмҲҳмқҳ кІҪмҡ° NATO(North Atlantic Treaty Organization) н‘ңмӨҖ STANAG(Standardization Agreement) 4193м—җ л”°лҘё к°’мқ„ мӮ¬мҡ©н•ҳл©°, Fig. 3кіј к°ҷмқҙ к°Ғк°Ғмқҳ л№” нҢЁн„ҙмқ„ к°Җм§Җкі л°©мӮ¬н•ңлӢӨ[3]. л№” нҢЁн„ҙмқҖ APM лӘЁлҚём—җ л°ҳмҳҒлҗҳм–ҙ м „нҢҢ мҶҗмӢӨ к°’мқ„ кі„мӮ°н•ҳкІҢ лҗңлӢӨ.
2.1.2 м•Ҳн…ҢлӮҳ кө¬лҸҷлӘЁлҚё
н”јм•„мӢқлі„ л ҲмқҙлӢӨ кө¬лҸҷлӘЁлҚёмқҳ кІҪмҡ° лӘЁл“ң лӢЁмң„лЎң кө¬м„ұлҗҳл©°, кё°ліём ҒмңјлЎң SIF лӘЁл“ң(1, 2, 3/A, C)лЎң кө¬м„ұлҗҳкі м¶”к°Җм ҒмңјлЎң S лӘЁл“ңлҘј м„ нғқн•ҳм—¬ л°©мӮ¬н• мҲҳ мһҲлӢӨ. к°Ғк°Ғмқҳ лӘЁл“ңлҠ” м•„лһҳ Table 2мҷҖ к°ҷмқҙ м„ңлЎң лӢӨлҘё нҢҢнҳ•м—җ л”°лҘё л°©мӮ¬ мӢңк°„мқ„ к°Җм§Җл©° л°©мӮ¬лҗңлӢӨ[1,2]. м•Ҳн…ҢлӮҳ кө¬лҸҷлӘЁлҚёмқҖ к°Ғ нҢҢнҳ•мқҳ мӢңк°„ м •ліҙлҘј мқҙмҡ©н•ҳм—¬ мҲҳмӢқ (1), (2)мҷҖ к°ҷмқҙ к°ҒлҸ„лЎң нҷҳмӮ°н•ҳм—¬ кө¬лҸҷн•ңлӢӨ. лҳҗн•ң к°Ғ лӘЁл“ңл§ҲлӢӨ н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ мҶЎ/мҲҳмӢ нҶөмӢ м§Җм—°мӢңк°„(timedelay)мқ„ л°ҳмҳҒн•ҳмҳҖлӢӨ.
TableВ 2.
Radiative time of IFF mode
| Mode | Radiative time [Вөs] |
|---|---|
| 1 | 2.9 вҲј 3.1 |
| 2 | 4.8 вҲј 5.2 |
| 3/A | 7.8 вҲј 8.2 |
| C | 20.8 вҲј 21.2 |
| S | 4.0 |
S лӘЁл“ңмқҳ кІҪмҡ° ALL CALL л°Ҹ ROLL CALLлЎң кө¬м„ұлҗҳм–ҙ мһҲкі нғҖ лӘЁл“ң мӮ¬мқҙм—җ көҗлҢҖлЎң м§Ҳл¬ён•ҳкІҢ лҗңлӢӨ. ALL CALLмқҖ м§ҖмғҒкөӯм—җм„ң лӘЁл“ н‘ңм Ғкё°м—җ мқјкҙ„ м§Ҳл¬ё н•ҳ лҠ” кІғмқҙкі , ROLL CALLмқҖ ALL CALLлЎңл¶Җн„° лҚ°мқҙн„°л§ҒнҒ¬лҘј мӣҗн•ҳлҠ” н‘ңм Ғкё°лҘј нҸ¬м°©н•ҳм—¬ к°ңлі„лЎң м§Ҳл¬ён•ҳлҠ” кІғмқҙлӢӨ. нҳ„мһ¬ көӯлӮҙ н•ӯкіөкё° мқ‘лӢөкё°лҠ” S лӘЁл“ңм—җ лҢҖн•ң мқ‘лӢө м„Өм •мқҙ кө¬м„ұлҗҳм–ҙ мһҲм§Җ м•ҠмқҖ нҳ„нҷ©мқҙлӢӨ.
2.1.3 мқ‘лӢөнҢҗлӢЁ лӘЁлҚё
л ҲмқҙлӢӨ м„ұлҠҘмқ„ лӮҳнғҖлӮҙлҠ” м§Җн‘ңлҠ” мқјл°ҳм ҒмңјлЎң мҲҳмӢқ (3)кіј к°ҷмқҙ л ҲмқҙлӢӨ л°©м •мӢқмқ„ нҶөн•ҙ мӮ°м¶ңн•ңлӢӨ. м§Ҳл¬ёкё°мқҳ мқ‘лӢөнҢҗлӢЁ лӘЁлҚёмқҳ кІҪмҡ° мқ‘лӢөкё°лЎңл¶Җн„° мҲҳмӢ н•ң мӢ нҳёлҘј мҲҳмӢқ (3)мқ„ нҶөн•ҙ мҲҳмӢ мӢ нҳё м„ёкё°(PR)лЎң кі„мӮ°н•ңлӢӨ[4]. л ҲмқҙлӢӨ м„Өкі„ ліҖмҲҳлҠ” мҡҙмҡ© к°’мқ„ л°ҳмҳҒн•ҳмҳҖкі , мҲҳмӢ мқҙл“қмқҖ н‘ңм Ғкё°мқҳ мң„м№ҳм—җ л”°лҘё мҶҗмӢӨмқ„ кі л Өн•ҳм—¬ л°ҳмҳҒн•ҳмҳҖлӢӨ. лҳҗн•ң, мҶҗмӢӨмһЎмқҢмқҖ мӢңмҠӨн…ң м—ҙмһЎмқҢм—җ мқҳн•ң нҒ¬кё°л§Ң кі л Өн•ҳм—¬ кі м • к°’мңјлЎң м Ғмҡ©н•ҳмҳҖлӢӨ. лҢҖкё° мҶҗмӢӨмқҳ кІҪмҡ° APM лӘЁлҚёмқ„ нҶөн•ҙ м§Җнҳ• л°Ҹ лҢҖкё°лҘј л°ҳмҳҒн•ҳм—¬ кұ°лҰ¬лі„лЎң мӮ°м¶ңн•ҳмҳҖлӢӨ. кі„мӮ°н•ң н‘ңм Ғмқҳ мҲҳмӢ мӢ нҳё м„ёкё°мҷҖ мҲҳмӢқ (4)м—җм„ң кі„мӮ°н•ң кұ°лҰ¬лі„ мһ„кі„к°’ GTC(Gain Time Control)мҷҖ MTL (Minimum Trigger Level)мқ„ 비көҗн•ҳм—¬ мқ‘лӢө м„ұкіө м—¬л¶ҖлҘј нҢҗлӢЁн•ңлӢӨ.
Pt: мҶЎмӢ м „л Ҙ (kW)
Gt: мҶЎмӢ мқҙл“қ (W/W)
Gr: мҶЎмӢ мқҙл“қ (W/W)
О»: нҢҢмһҘ (m)
Lsys: мҲҳмӢ мқҙл“қ (W/W)
LP: мӢңмҠӨн…ңмҶҗмӢӨ (W/W)
R: н”јм•„мӢқлі„ л ҲмқҙлӢӨмҷҖ н‘ңм Ғ к°„ кұ°лҰ¬ (m)
Lpat: лҢҖкё° мҶҗмӢӨ (W/W)
LTc: нҢЁн„ҙ мҶҗмӢӨ (W/W)
LM: M factor (W/W)
LRc: мјҖмқҙлё” мҶҗмӢӨ (W/W)
м—¬кё°м—җм„ң MTLмқҖ мғҒмҲҳмқҙл©°, GTCмқҳ кІҪмҡ° кұ°лҰ¬м—җ л”°лқј к°җмҶҢн•ҳлҠ” нҳ•нғңмқҙлӢӨ. н”јм•„мӢқлі„ л ҲмқҙлӢӨк°Җ мҡҙмҡ©лҗҳлҠ” нҷҳкІҪм—җм„ңмқҳ нҺ„мҠӨ мҪ”л”©, н‘ңм Ғкё° мҲҳмӢ нҢҗлӢЁ лЎңм§Ғм—җм„ңмқҳ мқҙл“қ мІҳлҰ¬лҘј кё° л°ҳмҳҒн•ҳм—¬ кі м • MTL к°’мқ„ кІ°м •н•ҳмҳҖлӢӨ. GTCлҠ” кё°ліём ҒмңјлЎң кұ°лҰ¬м—җ л°ҳ비лЎҖн•ҳм—¬ мӮ°м¶ңлҗҳлҠ” к°’мқҙ кі , мөңмў…м ҒмңјлЎң мһ„кі„м№ҳлҠ” мҲҳмӢқ (5)мҷҖ к°ҷмқҙ кұ°лҰ¬м—җ л”°лқј MTL, GTC мӨ‘ нҒ° к°’мңјлЎң кІ°м •лҗңлӢӨ.
мҲҳмӢқ (3)м—җм„ң мӮ°м¶ңн•ң мҲҳмӢ мӢ нҳё м„ёкё°к°Җ мһ„кі„м№ҳліҙлӢӨ нҒ° кІҪмҡ° мқ‘лӢө м„ұкіөмңјлЎң нҢҗлӢЁн•ҳмҳҖлӢӨ. л ҲмқҙлӢӨ 1нҡҢм „ мӢң н‘ңм Ғмқҳ мқ‘лӢөмқҖ м•Ҫ 20нҡҢ мқҙмғҒмқҙ мҲҳмӢ лҗҳкі , мқ‘лӢө л©”лӘЁлҰ¬к°Җ нғҗм§ҖнҢҗлӢЁ лӘЁлҚём—җ м „лӢ¬лҗҳм–ҙ н‘ңм Ғмқҳ мөңмў… нғҗм§ҖнҢҗлӢЁ м—¬л¶ҖлҘј кІ°м •н•ңлӢӨ.
2.1.4 нғҗм§ҖнҢҗлӢЁ лӘЁлҚё
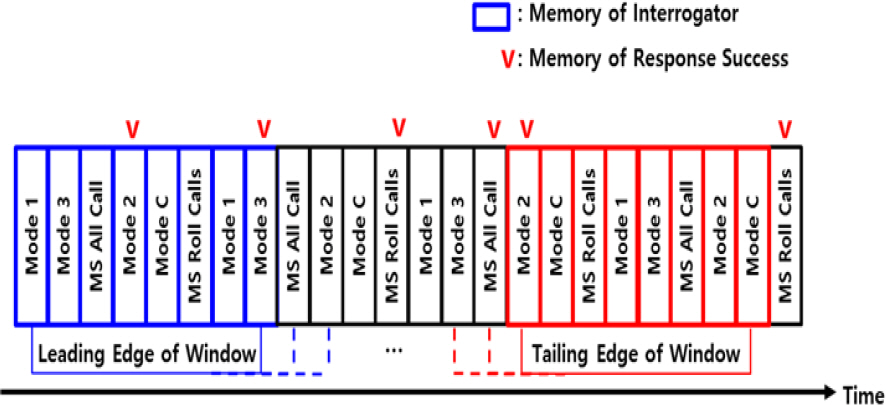
н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ нғҗм§ҖнҢҗлӢЁмқҖ мқ‘лӢө л©”лӘЁлҰ¬ мӨ‘м—җм„ң мқ‘лӢө м„ұкіө нҡҹмҲҳк°Җ 4нҡҢ мқҙмғҒмқё кІҪмҡ°лЎң Fig. 4мҷҖ к°ҷмқҖ м•Ңкі лҰ¬мҰҳмқ„ нҶөн•ҙ нҢҗлӢЁн• мҲҳ мһҲлӢӨ. к°ңл°ңн•ң н”јм•„мӢқлі„ мһҘ비мқҳ м•Ңкі лҰ¬мҰҳм—җ мқ‘лӢө м„ұкіө кё°мӨҖмқҙ 4нҡҢлЎң м„Өм •лҗҳм–ҙ мһҲкё° л•Ңл¬ём—җ лӘЁмқҳ мӢңм—җлҸ„ лҸҷмқјн•ң мЎ°кұҙмңјлЎң мҲҳн–үн•ҳмҳҖлӢӨ.
л ҲмқҙлӢӨ нҡҢм „м—җ л”°лқј н‘ңм Ғкё°лЎңл¶Җн„° мҲҳмӢ н•ң мқ‘лӢө л©”лӘЁлҰ¬мқҳ Leading Edge л°Ҹ Tailing EdgeлҘј нҢҗлӢЁн•ҳм—¬ Edge кө¬к°„ лӮҙмқҳ л©”лӘЁлҰ¬ мӨ‘ мҲҳмӢ м„ұкіөн•ң мқ‘лӢө л©”лӘЁлҰ¬ к°ңмҲҳк°Җ 4к°ң мқҙмғҒмқём§Җ нҢҗлӢЁн•ҳм—¬ нғҗм§Җм—¬л¶ҖлҘј кІ°м •н•ңлӢӨ. мқҙ л•Ң мҲҳмӢ м„ұкіөн•ң мқ‘лӢө л©”лӘЁлҰ¬мқҳ кё°мӨҖмқҖ м•һм„ң м„ӨлӘ…н•ң мқ‘лӢөнҢҗлӢЁ лӘЁлҚём—җм„ң мһ„кі„м№ҳ мқҙмғҒмқҳ мҲҳмӢ мӢ нҳё м„ёкё°к°Җ мһҲлҠ” кІҪмҡ°мқҙлӢӨ. 8к°ңмқҳ л©”лӘЁлҰ¬лҠ” мҲҳмӢ лҗҳлҠ” мқ‘лӢө лӘЁл“ңлҘј мӢӨмӢңк°„мңјлЎң м ҖмһҘн•ҳлҠ”лҚ°, мқҙ л•Ң л©”лӘЁлҰ¬ л°•мҠӨ мўҢмёЎл¶Җн„° 8к°ң 묶мқҢмқ„ мҠӨмә”н•ҳм—¬ 8к°ң мӨ‘ 2к°ңмқҳ мқ‘лӢө мӢ нҳёк°Җ мЎҙмһ¬н• кІҪмҡ° Leading Edgeлқјкі м •мқҳн•ҳл©° нғҗм§ҖнҢҗлӢЁмқ„ мӢңмһ‘н•ңлӢӨ. к·ё нӣ„ мўҢмёЎм—җм„ң мҡ°мёЎмңјлЎң м—°мҶҚм ҒмңјлЎң нӣ‘мңјл©° кІҖмӮ¬н•ҳлӢӨк°Җ 8к°ңмқҳ л©”лӘЁлҰ¬ мӨ‘ 1к°ңмқҳ мқ‘лӢө мӢ нҳёл§Ң мЎҙмһ¬н• кІҪмҡ° Tailing Edgeлқј м •мқҳн•ҳл©°, нғҗм§Җ нҢҗлӢЁ кө¬к°„мқ„ нҷ•м •м§“лҠ”лӢӨ. Fig. 4м—җм„ңлҠ” мҙқ 5лІҲмқҳ мқ‘лӢө м„ұкіө нҡҹмҲҳк°Җ мЎҙмһ¬н•ҳлҜҖлЎң нғҗм§Җк°Җ лҗҳм—ҲлӢӨкі нҢҗлӢЁн• мҲҳ мһҲлӢӨ.
мқҙлҹ¬н•ң кіјм •мқ„ нҶөн•ҙ л ҲмқҙлӢӨ 1нҡҢм „м—җ лҢҖн•ң нғҗм§ҖнҢҗлӢЁмқҙ кІ°м •лҗҳл©° мөңмў…м ҒмңјлЎң нғҗм§Җ м„ұкіөлҘ (%)мқҖ мҙқ л ҲмқҙлӢӨ нҡҢм „мҲҳм—җ л”°лҘё нғҗм§ҖнҢҗлӢЁ м„ұкіө нҡҹмҲҳлЎң м •мқҳн• мҲҳ мһҲлӢӨ.
н‘ңм Ғ лӘЁлҚё
н‘ңм Ғ мҡҙлҸҷмқ„ лӘЁмӮ¬н•ҳлҠ” лӘЁлҚёмқҖ лӘЁмқҳ мҲҳмӨҖм—җ л”°лқј нҒ¬кІҢ 3мһҗмң лҸ„ л°Ҹ 6мһҗмң лҸ„ мҡҙлҸҷ лӘЁлҚёлЎң лӮҳлүңлӢӨ. ліё л…јл¬ём—җм„ңлҠ” н‘ңм Ғ мһҗм„ёлҠ” кі л Өн•ҳм§Җ м•Ҡкі мң„м№ҳм—җ л”°лҘё н”јм•„мӢқлі„ л ҲмқҙлӢӨ м„ұлҠҘмқҳ ліҖнҷ”лҘј мҳҲмёЎн•ҳкі л¶„м„қн•ҳлҠ” кІғмқҙ лӘ©м Ғмқҙкё° л•Ңл¬ём—җ 병진мҡҙлҸҷл§Ңмқ„ кі л Өн•ҳм—¬ 3мһҗмң лҸ„ м§Ҳм җмҡҙлҸҷ лӘЁлҚёлЎң н‘ңм Ғ лӘЁлҚёмқ„ кө¬м„ұн•ҳмҳҖлӢӨ.
2.2.1 н‘ңм Ғкё° мҡҙлҸҷ лӘЁлҚё
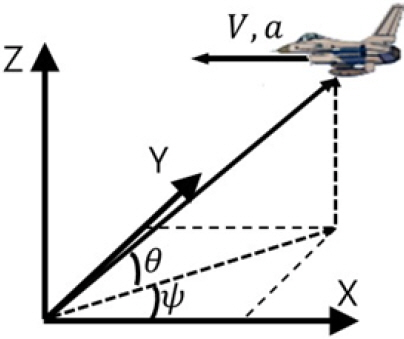
Fig. 5м—җм„ң н”јм•„мӢқлі„ л ҲмқҙлӢӨ кё°мӨҖ ENU мўҢн‘ңкі„м—җм„ң V, aлҠ” кё°мҲҳл°©н–Ҙ мҶҚлҸ„ л°Ҹ к°ҖмҶҚлҸ„мқҙкі , ENU мўҢн‘ңкі„м—җм„ңмқҳ мҶҚлҸ„ м„ұ분мқ„ мҲҳмӢқ (5)мқҳ мўҢн‘ңліҖнҷҳмқ„ нҶөн•ҙ мӮ°м¶ңн• мҲҳ мһҲлӢӨ. мҲҳмӢқ (6)мқҳ лҜёл¶„л°©м •мӢқмңјлЎңл¶Җн„° лӢӨмқҢ мӢңк°„к°„кІ©(вҲҶt) мқҙнӣ„м—җм„ңмқҳ мң„м№ҳлҘј мӮ°м¶ңн• мҲҳ мһҲлӢӨ. мҡҙлҸҷ лӘЁлҚёмқҳ м „мІҙ нқҗлҰ„мқҖ Fig. 6м—җ лҸ„мӢңн•ң л°”мҷҖ к°ҷлӢӨ.

[X, Y, Z]: н‘ңм Ғ мң„м№ҳ (m)
Оё: 비н–ү кІҪлЎңк°Ғ (deg)
[ax, ay, az]: к°ҖмҶҚлҸ„ лӘ…л № (m/s2)
V: 비н–үмҶҚлҸ„ (m/s)
ПҲ: л°©мң„к°Ғ (deg)
2.2.2 кё°лҸҷ мӢңлӮҳлҰ¬мҳӨ лӘЁлҚё
н‘ңм Ғкё° кё°лҸҷ мӢңлӮҳлҰ¬мҳӨ лӘЁлҚёмқҖ мҙҲкё° н‘ңм Ғмқҳ мң„м№ҳ л°Ҹ 비н–ү мҶҚлҸ„лҘј мһ…л Ҙ л°ӣм•„ н‘ңм Ғкё° мҡҙлҸҷ лӘЁлҚёмқҙ лӘЁмқҳлҗ мҲҳ мһҲлҸ„лЎқ нҶөм ңн•ңлӢӨ. ліё л…јл¬ём—җм„ң лӘЁмқҳн•ҳлҠ” н‘ңм Ғкё° кё°лҸҷ мӢңлӮҳлҰ¬мҳӨлҠ” мӢӨм ң мӢңн—ҳмқ„ л°”нғ•мңјлЎң л“ұмҶҚ м§Ғ진мҡҙлҸҷмқ„ кё°ліёмңјлЎң м„Өм •н•ҳмҳҖлӢӨ.
2.2.3 мҡҙмҡ©нҷҳкІҪ лӘЁлҚё
ліё л…јл¬ём—җм„ңлҠ” мҡҙмҡ©нҷҳкІҪм—җм„ңмқҳ лҢҖкё° л°Ҹ м§Җнҳ•м—җ л”°лҘё м „нҢҢ нҠ№м„ұмқ„ кі„мӮ°н•ҳкё° мң„н•ҙм„ң APM лӘЁлҚёмқ„ м Ғмҡ©н•ң AREPS(Advanced Refractive Effects Prediction System) н”„лЎңк·ёлһЁмқ„ нҷңмҡ©н•ҳмҳҖлӢӨ. мқҙлҘј нҶөн•ҙ л ҲмқҙлӢӨ мң„м№ҳмқҳ лҢҖкё° л°Ҹ м§Җнҳ• м •ліҙмҷҖ л ҲмқҙлӢӨ м ңмӣҗм—җ л”°лҘё л°©мң„лі„ кі к°Ғм—җ лҢҖн•ң мҶҗмӢӨ кі„мӮ° кІ°кіјлҘј нҡҚл“қн•ҳмҳҖлӢӨ[5]. лЁјм Җ APM лӘЁлҚёмқҖ мҡҙмҡ©нҷҳкІҪм—җм„ңмқҳ лҢҖкё° мҳЁлҸ„ л°Ҹ м••л Ҙмқ„ л°”нғ•мңјлЎң мҲҳмӢқ (7)лЎң м „нҢҢ көҙм ҲлҸ„(N)лҘј кі„мӮ°н•ңлӢӨ. мқҙлҹ¬н•ң м „нҢҢ көҙм ҲлҸ„лҠ” APM лӘЁлҚём—җм„ң м•Ҳн…ҢлӮҳ л№” нҢЁн„ҙкіј м§Җнҳ• лҚ°мқҙн„°мҷҖ м—°кҙҖлҗҳм–ҙ мҲҳмӢқ (8)кіј к°ҷмқҙ Propagation factor(F)лҘј кі„мӮ°н•ҳлҠ”лҚ° мӮ¬мҡ©лҗңлӢӨ[6]. м§Җнҳ• лҚ°мқҙн„°лҠ” 30 m лӢЁмң„лЎң м„Өм •лҗң DTED(Digital Terrain Elevation Data) л ҲлІЁ 2лҘј м Ғмҡ©н•ҳм—¬ лҢҖкё°мҷҖ л ҲмқҙлӢӨ мӮ¬мқҙнҠё мЈјліҖ м§Җнҳ•мқ„ лӘЁл‘җ кі л Өн•ң м „нҢҢ мҶҗмӢӨмқ„ мӮ°м¶ңн•ҳмҳҖлӢӨ.
T: мҳЁлҸ„ (K) P: м••л Ҙ (hPa) e: мҲҳмҰқкё°м•• (hPa)
E: м•Ҳн…ҢлӮҳ нҢЁн„ҙмқҙ нҸ¬н•Ёлҗң мҲҳмӢ м җм—җм„ңмқҳ н•„л“ң нҒ¬кё°
E0: л“ұл°©м„ұ м•Ҳн…ҢлӮҳ мҲҳмӢ м җм—җм„ңмқҳ н•„л“ң нҒ¬кё°
APM лӘЁлҚём—җм„ң м „нҢҢмҶҗмӢӨ(Lp)мқҖ мҲҳмӢқ (9)лЎң кі„мӮ°н•ҳкі , мқҙлҠ” мҲҳмӢқ (3)мқҳ лҢҖкё° мҶҗмӢӨ к°’мңјлЎң мһ…л ҘлҗңлӢӨ. мқҙл•Ң м „нҢҢмҶҗмӢӨмқҖ мһҗмң кіөк°„м—җм„ңмқҳ л№” нҢЁн„ҙмқҙ кі л Өлҗң л°©мӮ¬ мҶҗмӢӨ(Lfs)м—җ лҢҖкё°мғҒнғңмҷҖ м•һм„ң мӮ°м¶ңн•ң м§Җнҳ•м—җ л”°лҘё мҶҗмӢӨмқ„ л°ҳмҳҒн•ң FлЎң мқҙлЈЁм–ҙ진лӢӨ.
О»: нҢҢмһҘ (m) R: н‘ңм Ғ кұ°лҰ¬ (m)
мқҙ л•Ң, м „нҢҢ көҙм ҲлҸ„м—җ л”°лқј лҢҖкё° к°җмҮ„лҸ„к°Җ л°”лҖҢкё° л•Ңл¬ём—җ мқҙмғҒлҢҖкё°м—җм„ңлҠ” л№”мқҙ к№Ём§ҖлҜҖлЎң м „нҢҢ мҶҗмӢӨмқҙ м»Өм§ҖкІҢ лҗҳкі , мқҙм—җ л”°лқј н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ нғҗм§Җм„ұлҠҘм—җ мҳҒн–Ҙмқ„ лҜём№ңлӢӨ. ліё л…јл¬ём—җм„ңлҠ” н‘ңм Ғмқҙ кё°лҸҷн•Ём—җ л”°лқј л ҲмқҙлӢӨк°Җ нҸ¬м°©н•ң мң„м№ҳм—җм„ңмқҳ м „нҢҢмҶҗмӢӨ к°’мқ„ мӢӨмӢңк°„ л°ҳмҳҒн•ҳм—¬ м Ғмҡ©н•ҳмҳҖлӢӨ.
2.2.4 M&S лӘЁлҚё м—°лҸҷ
м•һм„ң кё°мҲ н•ң м§Ҳл¬ёкё°, н‘ңм Ғ, мҡҙмҡ©нҷҳкІҪ лӘЁлҚёмқҖ Fig. 7кіј к°ҷмқҙ мӢңкі„м—ҙм ҒмңјлЎң лҸҷмһ‘н•ңлӢӨ. н‘ңм Ғкё° кё°лҸҷ мӢңлӮҳлҰ¬мҳӨ л°Ҹ л ҲмқҙлӢӨ м„Өкі„ліҖмҲҳ мһ…л Ҙ к°’м—җ л”°лқј лЁјм Җ, кө¬лҸҷлӘЁлҚёмқҙ н”јм•„мӢқлі„ л ҲмқҙлӢӨ лӘЁл“ң мҡҙмҡ©м—җ л”°лҘё л°©мӮ¬ мӢңк°„мқ„ кі„мӮ°н•ҳм—¬ л ҲмқҙлӢӨлҘј кө¬лҸҷн•ңлӢӨ. м—¬кё°м„ң мӮ°м¶ңлҗң мӢңк°„ к°„кІ©мқҖ н‘ңм Ғкё° мҡҙлҸҷ лӘЁлҚём—җ м „лӢ¬лҗҳм–ҙ мӢӨмӢңк°„ кё°лҸҷмқ„ кі„мӮ°н•ңлӢӨ. л ҲмқҙлӢӨк°Җ л°©мң„ л°©н–ҘмңјлЎң нҡҢм „н•ҳл©ҙм„ң л№” нҸӯ лӮҙм—җ н‘ңм Ғмқҙ л“Өм–ҙмҳӨл©ҙ, мҲҳмӢ м•Ҳн…ҢлӮҳ л№” нҢҢнҳ•мңјлЎңл¶Җн„° л ҲмқҙлӢӨ л°©м •мӢқмқ„ нҶөн•ҙ мҲҳмӢ мӢ нҳё м„ёкё°лҘј кі„мӮ°н•ңлӢӨ. м „нҢҢмҶҗмӢӨмқҖ л№” нҢЁн„ҙ л°Ҹ н‘ңм Ғкё°мқҳ мң„м№ҳлҘј APM лӘЁлҚём—җ л°ҳмҳҒн•ҳм—¬ мӮ°м¶ңн•ҳмҳҖлӢӨ. мқҙ л•Ң, мӢӨм ң мҡҙмҡ©лҗҳлҠ” н‘ңм Ғкё°мқҳ мҲҳмӢ нҢҗлӢЁ лЎңм§ҒмқҖ м•Ң мҲҳ м—Ҷкё° л•Ңл¬ём—җ ліё л…јл¬ём—җм„ңлҠ” мқ‘лӢөкё°м—җ м§Ҳл¬ёкё° мӢ нҳёк°Җ 100 % лҸ„лӢ¬н•ңлӢӨкі к°Җм •н•ҳмҳҖлӢӨ.
лӢӨмқҢмңјлЎң м§Ҳл¬ёкё° лӘЁлҚём—җм„ң мқ‘лӢөкё°лЎңл¶Җн„° мҲҳмӢ н•ң мӢ нҳё м„ёкё°лЎңл¶Җн„° мһ„кі„м№ҳ мқҙмғҒмқҳ мӢ нҳёлҘј кұёлҹ¬ мқ‘лӢө м„ұкіөм—¬л¶ҖлҘј нҢҗлӢЁн•ҳмҳҖлӢӨ. л ҲмқҙлӢӨ нҡҢм „мқҙ 1нҡҢ мў…лЈҢлҗҳл©ҙ м•һм„ң кі„мӮ°н•ң мқ‘лӢөмӢ нҳё мӨ‘м—җм„ң leading edge л°Ҹ tailing edgeлҘј кө¬л¶„н•ҳкі 4нҡҢ мқҙмғҒмқҳ мқ‘лӢөмӢ нҳёк°Җ мӮ°м¶ңлҗң кІҪмҡ°лҘј нғҗм§Җ м„ұкіөмңјлЎң нҢҗлӢЁн•ҳм—¬ PPI нҷ”л©ҙм—җ к°ҖмӢңнҷ” л°Ҹ м ҖмһҘн•ҳкі , л ҲмқҙлӢӨ нҡҢм „ мҲҳ лҢҖ비 нғҗм§Җ м„ұкіө нҡҹмҲҳлЎң н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ нғҗм§Җ м„ұкіөлҘ мқ„ мӮ°м¶ңн•ҳмҳҖлӢӨ.
M&S кІ°кіј л°Ҹ м„ұлҠҘ кІҖмҰқ
3.1 мӢңлӮҳлҰ¬мҳӨ
ліё л…јл¬ём—җм„ңлҠ” н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ лӘЁл“ң мҡҙмҡ©м—җ л”°лҘё м„ұлҠҘ мҳҲмёЎ л°Ҹ 분м„қмқ„ 진н–үн•ҳкі , M&S лҸ„кө¬ кІҖмҰқмқ„ мң„н•ҳм—¬ мӢӨм ң л ҲмқҙлӢӨ мӮ¬мқҙнҠём—җм„ңмқҳ мӢӨмёЎ лҚ°мқҙн„°лҘј мқҙмҡ©н•ҳм—¬ лӘЁмқҳ кІ°кіјмҷҖ 비көҗ кІҖмҰқн•ҳмҳҖлӢӨ.
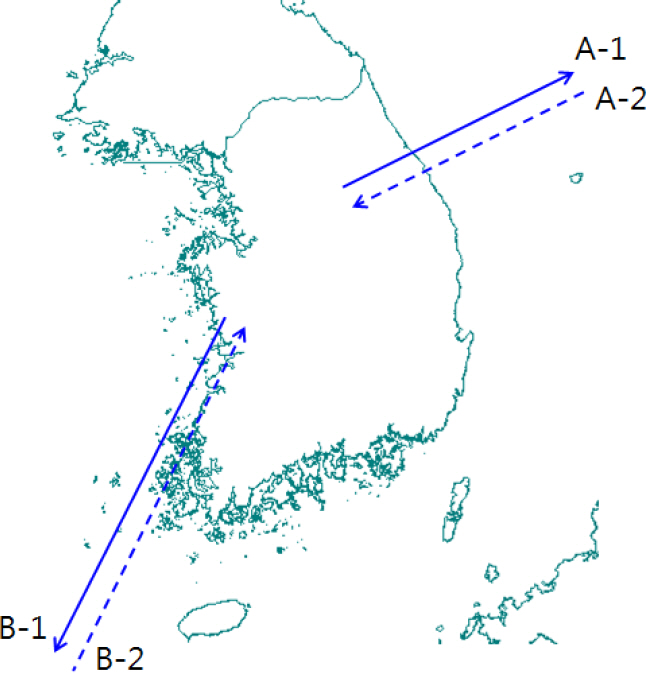
Fig. 8мқҖ н‘ңм Ғкё° кё°лҸҷ мӢңн—ҳ мӢңлӮҳлҰ¬мҳӨмқҳ к°ңлһөлҸ„лҘј лҸ„мӢңн•ң кІғмқҙлӢӨ. мӢңлӮҳлҰ¬мҳӨ AлҠ” н•ңл°ҳлҸ„ кё°мӨҖ л¶ҒлҸҷ л°©н–ҘмңјлЎң нҮҙк°Ғ л°Ҹ 진мһ…, мӢңлӮҳлҰ¬мҳӨ BлҠ” лӮЁм„ң л°©н–ҘмңјлЎң нҮҙк°Ғ л°Ҹ 진мһ…н•ҳлҠ” к¶Өм Ғмқ„ лӮҳнғҖлӮёлӢӨ. л‘җ мӢңлӮҳлҰ¬мҳӨ лӘЁл‘җ нҮҙк°Ғ кё°лҸҷ мӢң S лӘЁл“ңм—җ лҢҖн•ң мқ‘лӢөкё°лҘј offлЎң м„Өм •н•ҳкі мӢңн—ҳн•ҳмҳҖлӢӨ. мқҙлҹ¬н•ң мӢңн—ҳ кё°лҸҷ мӢңлӮҳлҰ¬мҳӨлҘј л°”нғ•мңјлЎң Table 3кіј к°ҷмқҙ мҙҲкё° мҡҙлҸҷ нҢҢлқјлҜён„°лҘј м„Өм •н•ҳмҳҖлӢӨ.
TableВ 3.
Summary of M&S model scenario
н”јм•„мӢқлі„ л ҲмқҙлӢӨ лӘЁл“ң мҡҙмҡ© л°Ҹ л№” нҢЁн„ҙ л“ұмқҳ ліҖмҲҳлҠ” мӢӨм ң м„Өкі„м№ҳлҘј л°ҳмҳҒн•ҳмҳҖлӢӨ. м „нҢҢнҷҳкІҪ лӘЁлҚёмқҳ кІҪмҡ° л ҲмқҙлӢӨ м„Өм№ҳ мӮ¬мқҙнҠёлҘј л°ҳмҳҒн•ң DTED м •ліҙлҘј мқҙмҡ©н•ҳкі , мӢңн—ҳ лӢ№мқј кё°мғҒ кҙҖмёЎ лҚ°мқҙн„°лҘј нҷңмҡ©н•ҳм—¬ APM лӘЁлҚёлЎңл¶Җн„° мӮ°м¶ңн•ҳмҳҖлӢӨ. S лӘЁл“ңмқҳ кІҪмҡ° мӮ¬мҡ©мң л¬ҙ кё°лҠҘмқ„ 추к°Җн•ҳм—¬ кө¬лҸҷ к°ҒлҸ„мқҳ ліҖнҷ”лҘј л°ҳмҳҒн•ҳкі , мқҙм—җ л”°лҘё н”јм•„мӢқлі„ л ҲмқҙлӢӨ нғҗм§Җм„ұлҠҘмқ„ 분м„қн•ҳмҳҖлӢӨ.
3.2 M&S 분м„қ кІ°кіј
Fig. 9, 10мқҖ м•һм„ң м„Өм •н•ң мӢңлӮҳлҰ¬мҳӨ A, Bм—җ лҢҖн•ң н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ м„ұлҠҘмқ„ 분м„қн•ң кІ°кіјмқҙлӢӨ. лӘЁмқҳм—җм„ң S лӘЁл“ң мң л¬ҙм—җ л”°лқј л ҲмқҙлӢӨ кө¬лҸҷмқҳ м°Ёмқҙк°Җ л°ңмғқн•ҙ л ҲмқҙлӢӨмҷҖ н‘ңм Ғкё° к°„ кұ°лҰ¬м—җ лҢҖн•ң м „нҢҢмҶҗмӢӨмқҖ лҜёлҜён•ҳкІҢ лӢӨлҘҙлӮҳ кё°лҸҷмқҖ лҸҷмқјн•ҳлӢӨ. м§Җнҳ• л°Ҹ лҢҖкё°м—җ мқҳн•ң м „нҢҢмҶҗмӢӨлЎң мӣҗкұ°лҰ¬м—җм„ң мҲҳмӢ мӢ нҳё м„ёкё°к°Җ мӨ„м–ҙл“Өм–ҙ нғҗм§Җм„ұлҠҘмқҙ м Җн•ҳлҗҳм§Җл§Ң н”јм•„мӢқлі„ нғҗм§Җм„ұкіөмқҖ лӘЁл‘җ л§ҢмЎұн•Ёмқ„ ліј мҲҳ мһҲлӢӨ.
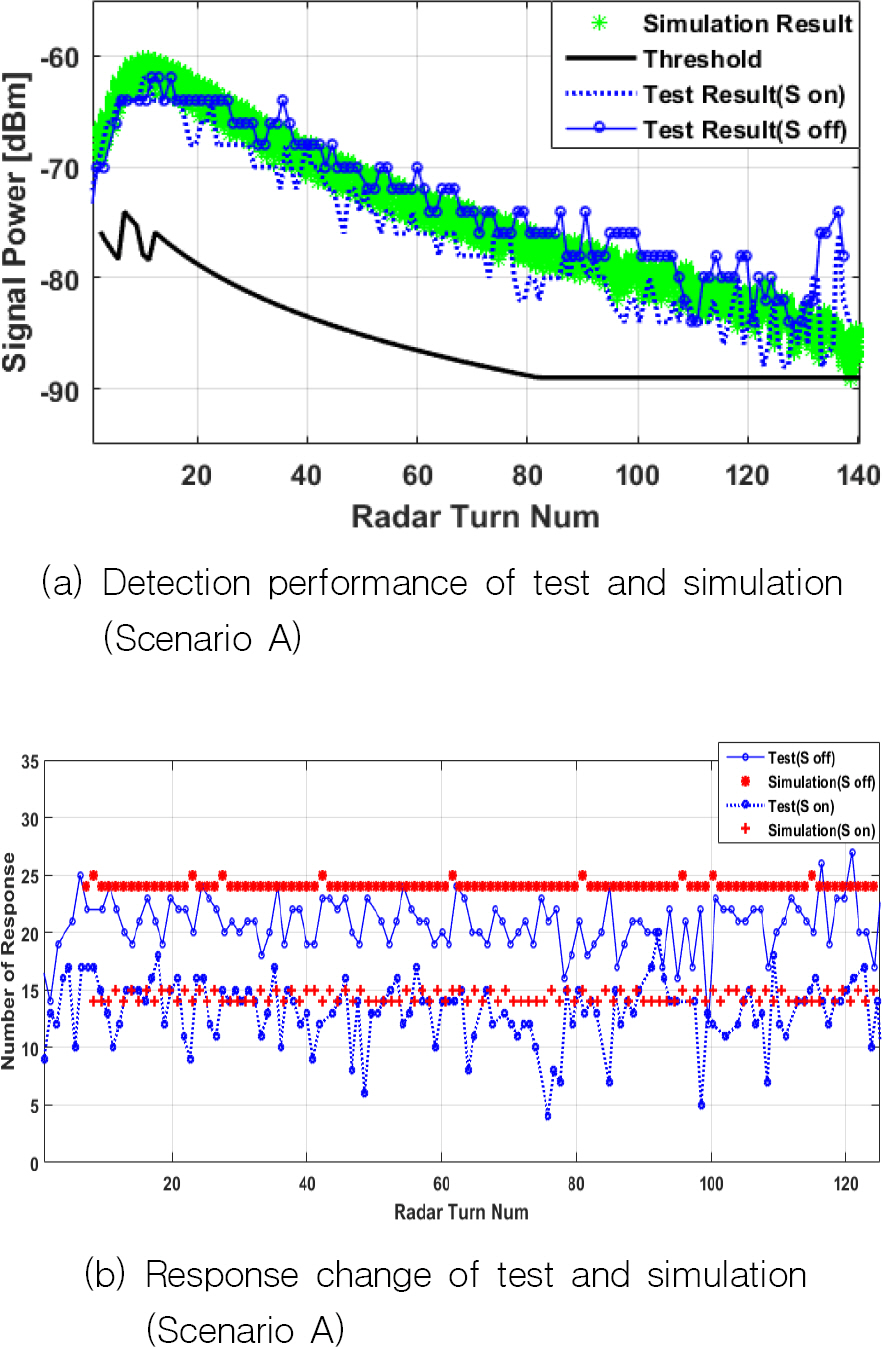
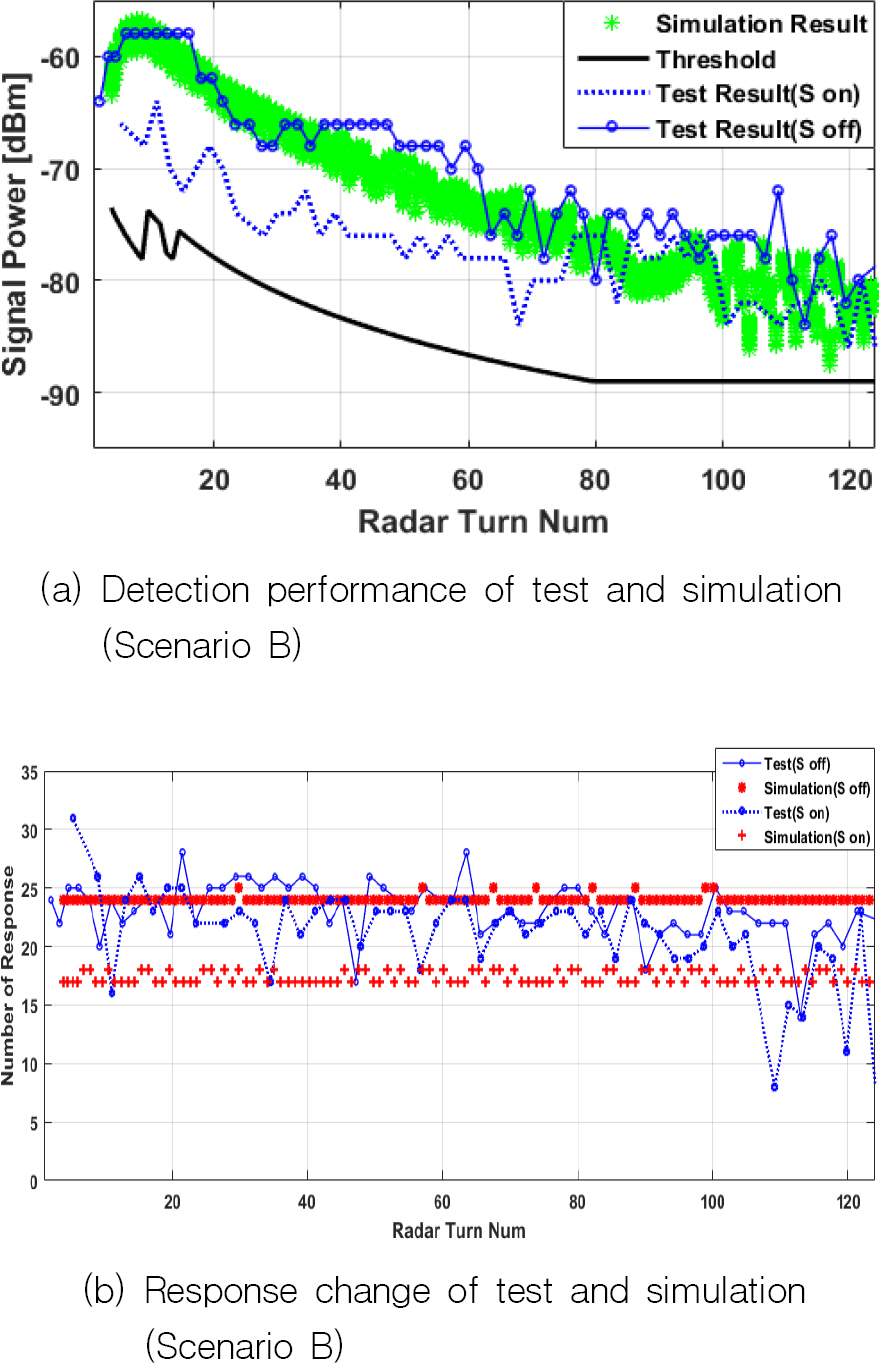
к°Ғ к·ёлҰјмқҳ (a)лҠ” л ҲмқҙлӢӨ нҡҢм „мҲҳм—җ л”°лҘё нғҗм§Җм„ұлҠҘмқ„ лҸ„мӢңн•ң кІғмқҙлӢӨ. мӢӨмёЎмқҳ кІҪмҡ° н‘ңм Ғмқҙ нғҗм§Җлҗң кІҪмҡ°м—җл§Ң к°’мқҙ м ҖмһҘлҗҳл©° мқҙлҠ” л ҲмқҙлӢӨк°Җ мҲҳмӢ н•ң мӢ нҳё м„ёкё°лЎң м •мқҳлҗңлӢӨ. M&S кІ°кіјлҠ” мҡҙмҡ©нҷҳкІҪ л°Ҹ мӢӨмӢңк°„ н‘ңм Ғкё° мң„м№ҳлҘј л°ҳмҳҒн•ҳкі мқҙлЎ мғҒ л ҲмқҙлӢӨ л°©м •мӢқмңјлЎңл¶Җн„° мӮ°м¶ңлҗң мҲҳмӢ мӢ нҳё м„ёкё°лҘј мқҳлҜён•ңлӢӨ. м—¬кё°м—җм„ң мһ„кі„к°’мқҖ м•һм„ң м„ӨлӘ…н•ң MTL, GTCмқ„ кұ°лҰ¬м—җ л”°лқј мөңлҢ“к°’мқ„ мӮ°м¶ңн•ҳм—¬ м Ғмҡ©н•ҳмҳҖлӢӨ. л ҲмқҙлӢӨ нҡҢм „мҲҳ 80нҡҢ мқҙмғҒмқј л•Ң н‘ңм Ғкё°мқҳ кұ°лҰ¬м—җ л”°лқј MTLмқҙ GTCліҙлӢӨ нҒ° к°’мқ„ к°Җм§Җкё° л•Ңл¬ём—җ мһ„кі„м№ҳк°Җ мқјм •н•ҳкІҢ мң м§ҖлҗҳлҠ” кІғмқ„ нҷ•мқён• мҲҳ мһҲлӢӨ. мӢңлӮҳлҰ¬мҳӨм—җ л”°лҘё мӢӨмёЎкіј лӘЁмқҳлҘј 비көҗн•ҳл©ҙ, мҡҙмҡ©нҷҳкІҪм—җ л”°лҘё м „нҢҢ мҶҗмӢӨмқҙ мӢӨм ңмҷҖ лӘЁмқҳнҷҳкІҪм—җм„ң м°Ёмқҙк°Җ мһҲмқ„ мҲҳ мһҲкё° л•Ңл¬ём—җ мҳӨм°Ёк°Җ л°ңмғқн•ҳлӮҳ м „л°ҳм Ғмқё мҲҳмӢ мӢ нҳё м„ёкё° кІҪн–ҘмқҖ мң мӮ¬н•ң кІғмқ„ нҷ•мқён• мҲҳ мһҲлӢӨ.
к°Ғ к·ёлҰјмқҳ (b)лҠ” мӢңлӮҳлҰ¬мҳӨ 1кіј 2, мҰү н”јм•„мӢқлі„ л ҲмқҙлӢӨ S лӘЁл“ңмқҳ мң л¬ҙм—җ л”°лҘё мқ‘лӢөмҲҳ кІ°кіјлҘј лӮҳнғҖлӮё кІғмқҙлӢӨ. мқҙлҘј мӢңлӮҳлҰ¬мҳӨ A, Bм—җ лҢҖн•ҙ лӘЁмқҳ/мӢӨмёЎ нҸүк· мқ‘лӢөмҲҳлЎң кө¬л¶„н•ҳм—¬ м •лҰ¬н•ҳл©ҙ Table 4мҷҖ к°ҷлӢӨ. мӢӨмёЎм—җм„ң н‘ңм Ғмқҳ кё°лҸҷм„ұмқҙ мқ‘лӢөкё° м„ұлҠҘм—җ мҳҒн–Ҙмқ„ лҜёміҗ л–ЁлҰјмқҙ мЎҙмһ¬н•ҳлҠ” л°ҳл©ҙ лӘЁмқҳм—җм„ңлҠ” н‘ңм Ғкё°к°Җ м§Ҳл¬ё мӢ нҳёлҘј лӘЁл‘җ мҲҳмӢ н–ҲлӢӨкі к°Җм •н–Ҳкё° л•Ңл¬ём—җ кұ°мқҳ мқјм •н•ҳкІҢ мң м§ҖлҗҳлҠ” нҳ„мғҒмқҙ лӮҳнғҖлӮҳм§Җл§Ң, нҸүк· мқ‘лӢөмҲҳк°Җ мң мӮ¬н•Ёмқ„ нҷ•мқён•ЁмңјлЎңмҚЁ лӘЁлҚёмқ„ кІҖмҰқн•ҳмҳҖлӢӨ.
TableВ 4.
Summary of M&S model scenario
| Mean Response Number |
Scenario A |
Scenario B |
||
|---|---|---|---|---|
| 1 | 2 | 1 | 2 | |
| Test | 14.23 | 21.52 | 19.91 | 23.02 |
| Simulation | 14.81 | 24.31 | 17.23 | 24.52 |
нҳ„мһ¬ мҡ°лҰ¬лӮҳлқјм—җ мһҲлҠ” лҢҖл¶Җ분мқҳ н‘ңм Ғкё°мқҳ кІҪмҡ° SлӘЁл“ңм—җ лҢҖн•ң мқ‘лӢөкё°к°Җ мһ‘лҸҷн•ҳм§Җ м•Ҡкё° л•Ңл¬ём—җ мқ‘лӢөмҲҳ л°Ҹ нғҗм§Җм„ұлҠҘм—җ м°Ёмқҙк°Җ л°ңмғқн• мҲҳл°–м—җ м—ҶлӢӨ. мӢңлӮҳлҰ¬мҳӨ A, B лӘЁл‘җ S лӘЁл“ң 추к°Җ мҡҙмҡ©м—җ л”°лқј м§Ҳл¬ё нҡҹмҲҳк°Җ к°җмҶҢн•ҳкі к·ём—җ л”°лқј мқ‘лӢө кё°нҡҢк°Җ м•Ҫ 30 % мӨ„м–ҙл“ңлҠ” нҡЁкіјлҘј нҷ•мқён•ҳмҳҖлӢӨ. н”јм•„мӢқлі„ л ҲмқҙлӢӨ лӘЁл“ң мҡҙмҡ©м—җ л”°лҘё лӘЁмқҳлҘј нҶөн•ҙ S лӘЁл“ңмқҳ мң л¬ҙк°Җ мӨ‘мҡ”н•Ёмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
н”јм•„мӢқлі„ л ҲмқҙлӢӨ м„ұлҠҘ нҢҗлӢЁмқ„ мң„н•ҙ ліё л…јл¬ём—җм„ңлҠ” л ҲмқҙлӢӨ нҡҢм „мҲҳм—җ л”°лҘё мҲҳмӢ кё°мқҳ мқ‘лӢөм„ұкіө нҡҹмҲҳлҘј л°”нғ•мңјлЎң нғҗм§Җ м„ұкіөлҘ мқ„ кі„мӮ°н•ҳмҳҖлӢӨ. мӢңн—ҳкІ°кіјлҠ” S лӘЁл“ң мң л¬ҙм—җ л”°лқј мӢңлӮҳлҰ¬мҳӨ Aмқҳ кІҪмҡ° 94.7 %, 96.1 %мқҙкі мӢңлӮҳлҰ¬мҳӨ Bмқҳ кІҪмҡ° 94.9 %, 95.7 %лЎң нҒ° м°Ёмқҙк°Җ м—ҶлӢӨ. лӘЁмқҳ кІ°кіј лҳҗн•ң мӢңлӮҳлҰ¬мҳӨ AмҷҖ B лӘЁл‘җ 100 %мқҳ нғҗм§Җ м„ұкіөлҘ мқ„ к°Җм§ҖлҠ” кІғмқ„ ліј мҲҳ мһҲлӢӨ. 비лЎқ лӘЁмқҳ мӢң н‘ңм Ғкё°к°Җ л ҲмқҙлӢӨ м§Ҳл¬ёмӢ нҳёлҘј лӘЁл‘җ мҲҳмӢ н–ҲлӢӨкі к°Җм •н–Ҳкё° л•Ңл¬ём—җ мҳӨм°ЁлҠ” мЎҙмһ¬н• мҲҳ мһҲм§Җл§Ң к·ё нҡЁкіјлҠ” лҜёлҜён•ҳлӢӨ.
мқҙлҹ¬н•ң кІ°кіјлҘј нҶөн•ҙ н”јм•„мӢқлі„ л ҲмқҙлӢӨк°Җ м Ғмқём§Җ м•„кө°мқём§Җ нҢҗлі„н•ҳлҠ” кІғмқ„ мҳҲмёЎн•ҳкё° мң„н•ҙ M&S лҸ„кө¬к°Җ н•„мҡ”н•Ёмқ„ м•Ң мҲҳ мһҲлӢӨ. лӮҳм•„к°Җ M&SлҘј нҷңмҡ©н•ҳм—¬ л ҲмқҙлӢӨ мІҙкі„ м„Өкі„ мӢң н”јм•„мӢқлі„ л ҲмқҙлӢӨ л№” мҡҙмҡ©м—җ л”°лҘё м„ұлҠҘ ліҖнҷ”лҘј нҷ•мқён•ҳкі мӮ¬м „м—җ мҳҲмёЎн• мҲҳ мһҲлӢӨ.
кІ° лЎ
кі мҶҚнҷ” л°Ҹ мҶҢнҳ•нҷ” лҗҳлҠ” н‘ңм Ғкё°лҘј л№ лҘҙкі м •нҷ•н•ң н”јм•„мӢқлі„мқ„ нҶөн•ҙ нғҗм§Җн•ҳкё° мң„н•ҙм„ң нғҗмғү л ҲмқҙлӢӨмқҳ к°ңл°ңлҝҗл§Ң м•„лӢҲлқј н”јм•„мӢқлі„ л ҲмқҙлӢӨ лҳҗн•ң мӨ‘мҡ”н•ҙм§Җкі мһҲлҠ” мӢӨм •мқҙлӢӨ. 비н–үмӢңн—ҳ лҳҗлҠ” мҲҳл§ҺмқҖ н‘ңм Ғкё°м—җ лҢҖн•ң л ҲмқҙлӢӨ м„ұлҠҘмқ„ 분м„қн•ҳкё°м—җлҠ” мӢңк°„, 비мҡ©мқҙ л§Һмқҙ н•„мҡ”н•ҳкё° л•Ңл¬ём—җ M&S лӘЁлҚёмқ„ нҶөн•ҙ мӮ¬м „ мҳҲмёЎн•ҳкі н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ нғҗм§Җ м„ұлҠҘмқ„ 분м„қн•ҳлҠ” кІғмқҙ н•„мҡ”н•ҳлӢӨ.
мқҙм—җ л”°лқј ліё л…јл¬ём—җм„ңлҠ” к°ңл°ңн•ң н”јм•„мӢқлі„ л ҲмқҙлӢӨ кё°лҠҘмқ„ лӘЁмӮ¬н•ҳкё° мң„н•ҙ л ҲмқҙлӢӨ(м§Ҳл¬ёкё°) л°Ҹ н‘ңм Ғкё°(мқ‘лӢөкё°), мҡҙмҡ©нҷҳкІҪ лӘЁлҚёмқ„ к°ңл°ң л°Ҹ нҶөн•©н•ҳмҳҖлӢӨ. к°ңл°ңн•ң лӘЁлҚёмқҖ н”јм•„мӢқлі„ л ҲмқҙлӢӨмқҳ лӘЁл“ң мҡҙмҡ©м—җ л”°лқј мӢңк°„м Ғмқё мҡ”мҶҢлҘј кі л Өн•ҳм—¬ н‘ңм Ғмқҳ кё°лҸҷ л°Ҹ м „нҢҢнҷҳкІҪмқ„ кі л Өн•ҳмҳҖлӢӨ. к°ңл°ңн•ң M&S лҸ„кө¬лҘј кІҖмҰқн•ҳкё° мң„н•ҙ 비н–ү мӢңн—ҳмқ„ нҶөн•ҙ нҷ•ліҙн•ң мӢӨмёЎ лҚ°мқҙн„°мҷҖ 비көҗн•ҳмҳҖкі , лӘЁмқҳкІ°кіјмҷҖ мӢңн—ҳкІ°кіјлҘј 비көҗ л°Ҹ 분м„қн•ҳм—¬ л ҲмқҙлӢӨ нҡҢм „мҲҳм—җ л”°лҘё нғҗм§Җм„ұлҠҘмқҳ мң мӮ¬м„ұмқ„ нҷ•мқён•ҳмҳҖлӢӨ. нҠ№нһҲ лӘЁл“ң Sмқҳ мң л¬ҙм—җ л”°лқј к°ҷмқҖ мӢңлӮҳлҰ¬мҳӨ мЎ°кұҙм—җм„ң лӘЁл“ң 1, 2, 3/A, Cм—җ лҢҖн•ң мқ‘лӢө 비мңЁмқҙ лӢ¬лқјм§Җкё° л•Ңл¬ём—җ мқҙм—җ л”°лҘё нғҗм§Җм„ұлҠҘмқҳ мҳҒн–Ҙм„ұлҸ„ нҢҢм•…н• мҲҳ мһҲм—ҲлӢӨ. мӢӨм ң мҡ°лҰ¬лӮҳлқј н‘ңм Ғкё°мқҳ кІҪмҡ° мҷёкөӯм—җм„ң мҲҳмһ…н•ң мӮ¬лЎҖк°Җ л§Һкё° л•Ңл¬ём—җ, лӘЁл“ң Sм—җ лҢҖн•ң мқ‘лӢөкё° мһҘ비к°Җ м„Өм№ҳлҗҳм–ҙ мһҲм§Җ м•Ҡм•„ мӢңн—ҳ мӢңлӮҳлҰ¬мҳӨ мӨ‘ S лӘЁл“ңлҘј мјңкі н”јм•„мӢқлі„ л ҲмқҙлӢӨ нғҗм§Җм„ұлҠҘмқ„ нҷ•мқён•ҳмҳҖмқ„ л•Ң кё°мЎҙ лҢҖ비 мқ‘лӢөмҲҳк°Җ л ҲмқҙлӢӨ 1нҡҢм „м—җ лҢҖн•ҙ 3нҡҢ м •лҸ„ к°җмҶҢн•Ёмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
лӮҳм•„к°Җ лӢӨм–‘н•ң н”јм•„мӢқлі„ лӘЁл“ңм—җ лҢҖн•ң 추к°Җ л°Ҹ м„Өкі„ліҖкІҪ мӮ¬н•ӯмқ„ л№ лҘё мӢңк°„ лӮҙм—җ м Җ비мҡ©мңјлЎң к°ңл°ңн•ң M&S лӘЁлҚёмқ„ нҶөн•ҙ нғҗм§Җм„ұлҠҘ мҳҲмёЎм—җ нҷңмҡ©н• мҲҳ мһҲмқ„ кІғмңјлЎң кё°лҢҖлҗңлӢӨ. 추нӣ„ мӢӨм ң н‘ңм Ғкё° мқ‘лӢөкё°к°Җ н”јм•„мӢқлі„ л ҲмқҙлӢӨлЎңл¶Җн„° м§Ҳл¬ёмӢ нҳёлҘј л°ӣмқ„ л•Ң л°ңмғқн•ҳлҠ” нҶөмӢ м Җн•ҳлҘј 추к°Җ кө¬м„ұн•ңлӢӨл©ҙ мӢӨм ң л°ңмғқ к°ҖлҠҘн•ң м„ұлҠҘ ліҖнҷ”лҘј мғҒм„ё 분м„қн• мҲҳ мһҲмқ„ кІғмңјлЎң кё°лҢҖлҗңлӢӨ. лҳҗн•ң 추к°ҖлЎң н‘ңм Ғкё° мһҗм„ём—җ л”°лҘё мқ‘лӢөкё°мқҳ нҠ№м„ұліҖнҷ”к°Җ мһҲмқ„ кІҪмҡ° лӘЁлҚём—җ 추к°Җ л°ҳмҳҒн• мҳҲм •мқҙлӢӨ.




