



м„ң лЎ
кҙҖм„ұн•ӯлІ•мһҘм№ҳлҠ” кҙҖм„ұ мўҢн‘ңкі„ кё°мӨҖмңјлЎң 비н–үмІҙм—җм„ң м •мқҳлҗң лҸҷмІҙ мўҢн‘ңкі„м—җм„ң 비н–үмІҙмқҳ 3축 нҡҢм „ мҡҙлҸҷмқ„ к°җм§Җн•ҳм—¬ к°ҒмҶҚлҸ„лҘј мёЎм •н•ҳлҠ” мһҗмқҙлЎңмҷҖ 비н–үмІҙмқҳ 3축 병진 мҡҙлҸҷмқ„ к°җм§Җн•ҳм—¬ к°ҖмҶҚлҸ„лҘј мёЎм •н•ҳлҠ” к°ҖмҶҚлҸ„кі„лЎң кө¬м„ұлҗҳм–ҙ мһҲлӢӨ[1~3]. кҙ‘н•ҷмӢқ мһҗмқҙлЎңмқҳ мқјмў…мқё л§Ғл Ҳмқҙм Җ мһҗмқҙлЎң(Ring Laser Gyroscope: мқҙн•ҳ RLG)лҘј нғ‘мһ¬н•ң кҙҖм„ұн•ӯлІ•мһҘм№ҳлҘј мқјл°ҳм ҒмңјлЎң л Ҳмқҙм Җ кҙҖм„ұн•ӯлІ•мһҘм№ҳ(Laser Inertial Navigation System: мқҙн•ҳ LINS)лқј н•ңлӢӨ[4]. RLG лҠ” кіө진기м—җ мһҘм°©лҗң л°ҳмӮ¬кІҪмқҳ нқЎмҲҳ/мӮ°лһҖ л“ұмқҳ нҠ№м„ұмңјлЎң мқён•ҳм—¬ м–ҙлҠҗ н•ңм •лҗң мһ‘мқҖ к°’ мқҙн•ҳмқҳ нҡҢм „мҡҙлҸҷмқ„ мёЎм •н•ҳм§Җ лӘ»н•ҳлҠ” мҳҒм—ӯмқҙ мЎҙмһ¬н•ҳл©° мқҙлҘј lock-in мқҙлқј н•ңлӢӨ[3,4]. RLGм—җм„ң lock-inмқ„ м ңкұ°н•ҳлҠ” лӢӨм–‘н•ң л°©лІ•мқҙ м ңмӢңлҗҳм—ҲмңјлӮҳ мқјл°ҳм ҒмңјлЎң RLG кіө진기м—җ lock-in нҒ¬кё°мқҳ м•Ҫ мІңл°° мқҙмғҒмқҳ 진нҸӯмқ„ к°Җм§ҖлҠ” м •нҳ„нҢҢ нҡҢм „ мҡҙлҸҷмқ„ кіө진기м—җ м—°мҶҚм ҒмңјлЎң мқёк°Җн•ҳлҠ” л°©лІ•мқҙ л„җлҰ¬ мӮ¬мҡ©лҗҳл©° мқҙ л•Ң мқёк°Җлҗң м •нҳ„нҢҢ нҡҢм „ мҡҙлҸҷмқ„ л””лҚ” мҡҙлҸҷ(Dither Motion)мқҙлқј н•ңлӢӨ[3,4]. мқҙмҷҖ к°ҷмқҙ RLG лӮҙл¶Җм—җм„ң л””лҚ” мҡҙлҸҷмқ„ кіө진기м—җ мқёк°Җн•ҳкІҢ лҗҳл©ҙ RLGлҠ” мҷёл¶Җм—җм„ң мқёк°ҖлҗҳлҠ” нҡҢм „ мҡҙлҸҷмқҙ м—Ҷм–ҙлҸ„ lock-in мҳҒм—ӯм—җм„ң лЁёл¬ҙлҘҙлҠ” мӢңк°„мқҙ мөңмҶҢнҷ” лҗңлӢӨ. л”°лқјм„ң lock-in мҳҒм—ӯ мқҙн•ҳмқҳ мһ‘мқҖ к°ҒмҡҙлҸҷмқҙ мҷёл¶Җм—җм„ң мқёк°Җлҗҳл©ҙ л””лҚ” мҡҙлҸҷкіј лҚ”н•ҙм ём„ң нҒ° к°Ғ мҡҙлҸҷмқҙ кіө진기м—җ н•ӯмғҒ мқёк°Җлҗҳл©° кіө진기м—җм„ң м¶ңл Ҙлҗң к°Ғ мҡҙлҸҷм—җм„ң л””лҚ” мҡҙлҸҷмқ„ м ңкұ°н•ҳкІҢ лҗҳл©ҙ lock-in мҳҒм—ӯ мқҙн•ҳмқҳ мһ‘мқҖ к°ҒмҡҙлҸҷмқҳ мёЎм •мқҙ к°ҖлҠҘн•ҳкІҢ лҗңлӢӨ[3,4].
м•һм—җм„ң м–ёкёүн•ң л°”мҷҖ к°ҷмқҙ л””лҚ” мҡҙлҸҷмқҖ м •нҳ„нҢҢ нҡҢм „ мҡҙлҸҷмқҙлҜҖлЎң мқјм •н•ң мЈјнҢҢмҲҳлҘј к°Җм§ҖкІҢ лҗңлӢӨ. мқјл°ҳм ҒмңјлЎң кіө진기мқҳ нҒ¬кё°м—җ л”°лқј мЈјнҢҢмҲҳк°Җ лӢӨлҘҙл©° кіө진기 лӮҙл¶Җмқҳ кҙ‘кІҪлЎң кёёмқҙк°Җ м•Ҫ 30 cmмқё RLGмқҳ кІҪмҡ°, м•Ҫ 100 deg/secмқҳ нҸүк· м§„нҸӯкіј м•Ҫ 350~450 Hzмқҳ мЈјнҢҢмҲҳлҘј к°–лҠ” л””лҚ” мҡҙлҸҷмқ„ RLG кіө진기м—җ мқёк°Җн•ҳм—¬ lock-in мҳҒм—ӯм—җм„ң лҸҷмһ‘н•ҳлҠ” мӢңк°„мқ„ мөңмҶҢнҷ”н•ЁмңјлЎңм„ң lock-inм—җ мқҳн•ң мҳӨм°ЁлҘј мөңмҶҢнҷ”н•ңлӢӨ[4]. RLGмқҳ кіө진기 нҒ¬кё°к°Җ мһ‘м•„м§ҖлҠ” кІҪмҡ°м—җлҠ” кіө진기 лӮҙл¶Җм—җм„ң л°ңмғқлҗң л Ҳмқҙм Җмқҳ м „нҢҢ кёёмқҙк°Җ м§§м•„м ё л°ҳмӮ¬кІҪм—җм„ң л°ҳмӮ¬лҗҳлҠ” л Ҳмқҙм Җмқҳ м–‘мқҙ мҰқк°Җн•ҳкІҢ лҗҳлҜҖлЎң л°ҳмӮ¬кІҪ мӮ°лһҖм—җ лҢҖн•ң мҳҒн–Ҙ лҳҗн•ң мҰқк°Җн•ҳкІҢ лҗҳлҜҖлЎң lock-in мҳҒм—ӯмқҙ лҚ” м»Өм§ҖкІҢ лҗңлӢӨ. мқҙлҹ¬н•ң кІҪмҡ° lock-in мҳҒм—ӯм—җ лЁёл¬ҙлҠ” мӢңк°„мқ„ мөңмҶҢнҷ”н•ҳкё° мң„н•ҙ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳлҘј мҰқк°ҖмӢңмјңм•ј н•ңлӢӨ. кіө진기 лӮҙл¶Җмқҳ кҙ‘кІҪлЎң кёёмқҙк°Җ 16 cmмқё RLGмқҳ кІҪмҡ° л””лҚ” мҡҙлҸҷмқҳ 진нҸӯмқҖ кҙ‘кІҪлЎң кёёмқҙ 30 cm RLG ліҙлӢӨ мҰқк°ҖмӢңмјң м„Өм •н•ҳкі л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳлҸ„ м•Ҫ 500 Hz мқҙмғҒмңјлЎң мҰқк°ҖмӢңмјң мӮ¬мҡ©н•ңлӢӨ. кҙ‘кІҪлЎң м•Ҫ 6 cmмқё RLGмқҳ кІҪмҡ° л¬ён—ҢмғҒм—җ кё°мҲ лҗң лӮҙмҡ©м—җ мқҳн•ҳл©ҙ м•Ҫ 1000 Hz л¶Җк·јм—җм„ң м„Өм •лҗҳлҠ” кІғмңјлЎң м•Ңл Өм ё мһҲлӢӨ[5]. RLGмқҳ к°Ғ 축мқҳ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳлҠ” 축 к°„ к°„м„ӯмқҳ мөңмҶҢнҷ”лҘј мң„н•ҙ м•Ҫ 30~50 Hz м •лҸ„ мқҙкІ©мӢңмјң м„ м •н•ңлӢӨ[4,6].
м•һм„ң кё°мҲ н•ң л°”мҷҖ к°ҷмқҙ LINSм—җ нғ‘мһ¬лҗҳлҠ” RLGмқҳ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳмқҳ кІҪмҡ° кҙ‘кІҪлЎң кёёмқҙм—җ мқҳн•ҙ 350~1000 Hzмқҳ л„“мқҖ 분нҸ¬лҘј к°Җ진лӢӨ. мқҙмҷҖ к°ҷмқҙ лҶ’мқҖ мҡҙлҸҷ мЈјнҢҢмҲҳлҠ” мқјл°ҳм ҒмңјлЎң 400 Hz мқҙмғҒмқҳ кі мң 진лҸҷ мЈјнҢҢмҲҳлҘј к°Җм§ҖлҸ„лЎқ м„Өкі„лҗҳлҠ” к°ҖмҶҚлҸ„кі„ мЈјнҢҢмҲҳмҷҖ мӨ‘мІ©лҗҳл©° мқҙлҹ¬н•ң кІҪмҡ° к°ҖмҶҚлҸ„кі„м—җ кіө진мқҙ л°ңмғқн•ҳм—¬ к°ҖмҶҚлҸ„кі„ м¶ңл Ҙмқҙ мҰқнҸӯлҗҳлҠ” нҳ„мғҒмқҙ л°ңмғқн•ҳкІҢ лҗңлӢӨ. ліё л…јл¬ём—җм„ңлҠ” л””лҚ” мҡҙлҸҷм—җ мқҳн•ң к°ҖмҶҚлҸ„кі„ кіө진мңјлЎң мқён•ҙ мҰқнҸӯлҗң к°ҖмҶҚлҸ„ мёЎм •к°’мқҙ LINS м •л ¬/н•ӯлІ• м„ұлҠҘм—җ лҜём№ҳлҠ” мҳҒн–Ҙмқ„ мқҙлЎ м ҒмңјлЎң 분м„қн•ҳкі мӢӨн—ҳмқ„ нҶөн•ҳм—¬ кІҖмҰқн•ң лӮҙмҡ©мқ„ кё°мҲ н•ҳмҳҖлӢӨ.
л””лҚ” мҡҙлҸҷм—җ мқҳн•ң к°ҖмҶҚлҸ„кі„ м¶ңл Ҙ лӘЁлҚёл§Ғ
LINS кҙҖм„ұм„јм„ң мЎ°лҰҪмІҙм—җ нғ‘мһ¬лҗҳлҠ” 3축мқҳ RLG л””лҚ” мЈјнҢҢмҲҳлҠ” кҙ‘кІҪлЎң кёёмқҙк°Җ м•Ҫ 30 cm RLGмқҳ кІҪмҡ° 400 HzлҘј кё°мӨҖмңјлЎң 축간 мғҒнҳё к°„м„ӯмқ„ мөңмҶҢнҷ”н•ҳкё° мң„н•ҳм—¬ м•Ҫ 30~50 Hz м •лҸ„ м°ЁмқҙлҘј л‘җкі м¶• м„ м •мқ„ н•ңлӢӨ. м„ м •лҗң 3축 RLGмқҳ л””лҚ” мЈјнҢҢмҲҳлҠ” лҢҖлһө 370, 400, 430 Hz к°Җ лҗҳл©° 3к°ң лӘЁл‘җ 3축 л°©н–ҘмңјлЎң кҙҖм„ұм„јм„ң мЎ°лҰҪмІҙм—җ мЎ°лҰҪлҗңлӢӨ. к°ҖмҶҚлҸ„кі„лҸ„ RLGмҷҖ л§Ҳм°¬к°Җм§ҖлЎң 3축 л°©н–ҘмңјлЎң кҙҖм„ұм„јм„ң мЎ°лҰҪмІҙм—җ мһҘм°©лҗҳлҜҖлЎң 3축мқҳ RLG л””лҚ” мҡҙлҸҷм—җ мқҳн•ң м •нҳ„нҢҢ 진лҸҷмқҖ RLG л°Ҹ к°ҖмҶҚлҸ„кі„м—җ мҳҒн–Ҙмқ„ лҜём№ҳкІҢ лҗңлӢӨ.
мқҙлЎ м ҒмңјлЎң 3축 к°ҖмҶҚлҸ„кі„мқҳ кҙҖм„ұм„јм„ң мЎ°лҰҪмІҙмқҳ мўҢн‘ңкі„ мӣҗм җкіј 3축 RLGмқҳ нҡҢм „ мҡҙлҸҷ мўҢн‘ңкі„мқҳ мӣҗм җмқҙ мқјм№ҳн•ңлӢӨкі к°Җм •н•ҳл©ҙ RLG л””лҚ” мҡҙлҸҷмқҖ нҡҢм „ мҡҙлҸҷмқҙлҜҖлЎң к°ҖмҶҚлҸ„кі„м—җм„ к°ҖмҶҚлҸ„к°Җ мёЎм •лҗҳм§Җ м•ҠкІҢ лҗңлӢӨ. к·ёлҹ¬лӮҳ кҙҖм„ұм„јм„ң мЎ°лҰҪмІҙм—җ RLG л°Ҹ к°ҖмҶҚлҸ„кі„ мЎ°лҰҪмӢңм—җ к°ҖмҶҚлҸ„кі„ мёЎм • мӨ‘мӢ¬м җкіј кҙҖм„ұм„јм„ң мЎ°лҰҪмІҙмқҳ мўҢн‘ңкі„ мӣҗм җмқ„ мқјм№ҳмӢңнӮӨлҠ” кІғмқҖ нҳ„мӢӨм ҒмңјлЎң л¶Ҳк°ҖлҠҘн•ҳлӢӨ. к·ёлҹ¬лҜҖлЎң к°ҖмҶҚлҸ„кі„ мёЎм • мӨ‘мӢ¬м җмқҖ мўҢн‘ңкі„ мӣҗм җкіј мқјм •н•ң кұ°лҰ¬лЎң мқҙкІ©лҗҳкІҢ лҗҳл©° мқҙкІ©лҗң кұ°лҰ¬мҷҖ л””лҚ” мҡҙлҸҷм—җ мқҳн•ҙ л°ңмғқн•ҳлҠ” нҡҢм „ мҡҙлҸҷм—җ мқҳн•ң мҳҒн–Ҙмқҙ к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳм—җ нҸ¬н•ЁлҗҳкІҢ лҗңлӢӨ. мқҙлҘј мҰқлӘ…н•ҳкё° мң„н•ҳм—¬ LINSм—җм„ң м¶ңл ҘлҗҳлҠ” мӢӨм ң мёЎм •м№ҳлҘј 분м„қн•ҙліҙл©ҙ мһҘ착축м—җ лҢҖн•ң л””лҚ” мҡҙлҸҷмқҙ лӢӨлҘё л‘җ 축м—җ 비н•ҳм—¬ 진нҸӯмқҙ мһ‘кІҢлӮҳл§Ҳ мёЎм •лҗңлӢӨ. мқҙмҷҖ к°ҷмқҖ мӮ¬мӢӨмқ„ к·јкұ°лЎң н•ҳм—¬ л””лҚ” мҡҙлҸҷм—җ лҢҖн•ң к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳлҘј лӘЁлҚёл§Ғн•ҳл©ҙ мӢқ (1)кіј к°ҷлӢӨ[6]. мӢқ (1)м—җм„ң fx, fy, fzлҠ” x, y, z축 RLGмқҳ л””лҚ” мЈјнҢҢмҲҳ, ОёijлҠ” л””лҚ” мҡҙлҸҷмқҳ мң„мғҒ мҳӨм°Ё, AijлҠ” i축 к°ҖмҶҚлҸ„кі„к°Җ j축 RLG л””лҚ” мҡҙлҸҷм—җ мқҳн•ҙ мҳҒн–Ҙ л°ӣлҠ” к°ҖмҶҚлҸ„ 진 нҸӯмқ„ мқҳлҜён•ңлӢӨ. Aijмқҳ нҒ¬кё°лҠ” кҙҖм„ұм„јм„ң мЎ°лҰҪмІҙмқҳ мўҢн‘ңкі„ мӨ‘мӢ¬м җм—җм„ңл¶Җн„° мқҙкІ©лҗң к°ҖмҶҚлҸ„кі„ мёЎм • мӨ‘мӢ¬м җк№Ңм§Җмқҳ кұ°лҰ¬мқҳ м ңкіұм—җ 비лЎҖн•ҳкі л””лҚ” мҡҙлҸҷм—җ мқҳн•ҙ л°ңмғқн•ҳлҠ” к°ҒмҶҚлҸ„мқҳ нҒ¬кё°м—җ 비лЎҖн•ңлӢӨ. л””лҚ” мҡҙлҸҷмқҳ мң„мғҒ мҳӨм°ЁлҠ” м •л ¬ л°Ҹ н•ӯлІ• лӘЁмҡ°л“ң 진мһ…мӢң л””лҚ” мҡҙлҸҷкіј лҸҷкё°к°Җ л§һм§Җ м•Ҡм•„ л°ңмғқн•ҳлҠ” кІғмңјлЎң кҙҖм„ұн•ӯлІ•мһҘм№ҳ л§Ө мҡҙмҡ©л§ҲлӢӨ лӢӨлҘҙкІҢ лӮҳнғҖлӮңлӢӨ.
к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳ 분м„қ
мқјл°ҳм ҒмңјлЎң к°ҖмҶҚлҸ„кі„мқҳ кіө진 мЈјнҢҢмҲҳ 분м„қмқҖ мқҙлЎ м Ғмқё 분м„қ мҷём—җ мӢӨн—ҳм ҒмңјлЎң 분м„қн•ҳлҠ” л°©лІ•мқҙ мһҲлӢӨ. мқҙлЎ м Ғмқё л°©лІ•мқҖ кё°кө¬м Ғмқё н•ҙм„қмқ„ нҶөн•ҳм—¬ мҲҳн–үлҗҳлӮҳ к¶Ғк·№м ҒмңјлЎң мӢӨн—ҳм ҒмңјлЎң мҰқлӘ…н•ҳлҠ” кіјм •мқҙ н•„мҡ”н•ҳкё° л•Ңл¬ём—җ ліё л…јл¬ём—җм„ңлҠ” мӢӨн—ҳм Ғмқё л°©лІ•мқ„ нҶөн•ҳм—¬ к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳ 분м„қкІ°кіјлҘј м ңмӢңн•ңлӢӨ.
мӢӨн—ҳм Ғ л°©лІ•мңјлЎң к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳлҘј м°ҫлҠ” л°©лІ•мқҖ мқјм •н•ң 진нҸӯмқ„ к°Җм§ҖлҠ” м •нҳ„нҢҢ к°ҖмҶҚлҸ„мқҳ мЈјнҢҢмҲҳлҘј ліҖкІҪн•ҳл©ҙм„ң к°ҖмҶҚлҸ„кі„м—җ мқёк°Җн•ң нӣ„ к°ҖмҶҚлҸ„кі„м—җм„ң м¶ңл ҘлҗҳлҠ” к°ҖмҶҚлҸ„ мёЎм •м№ҳмқҳ 진нҸӯмқ„ нҷ•мқён•ҳм—¬ к°ҖмһҘ нҒ° 진нҸӯмқҙ кі„мёЎлҗҳлҠ” мЈјнҢҢмҲҳлҘј к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳлЎң м„Өм •н•ҳлҠ” л°©лІ•мқҙлӢӨ. мқҙлҹ¬н•ң мӢӨн—ҳм Ғ л°©лІ•мқ„ нҶөн•ҳм—¬ к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳлҘј нғҗмғүн•ң кІ°кіјлҘј к·ёлҰјмңјлЎң лӮҳнғҖлӮҙл©ҙ Fig. 1кіј к°ҷлӢӨ.
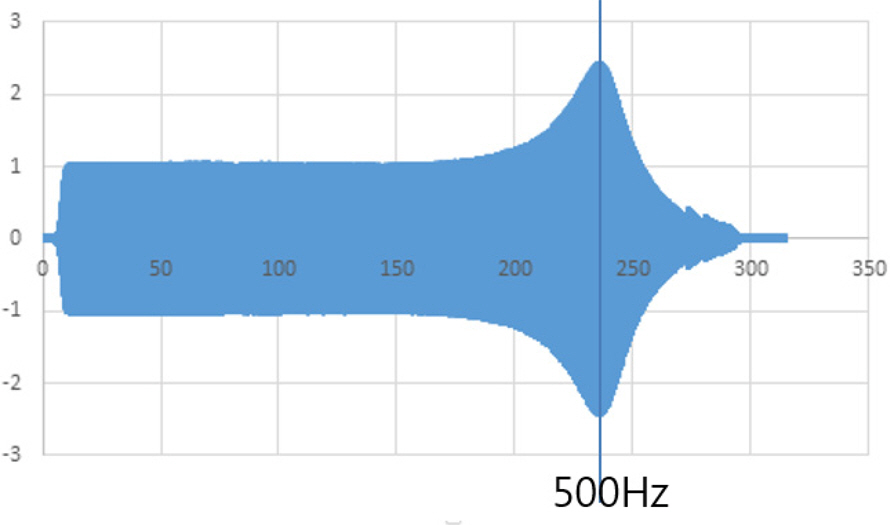
Fig. 1м—җм„ң x축мқҖ к°ҖмҶҚлҸ„кі„м—җ к°Җн•ҙм§ҖлҠ” мЈјнҢҢмҲҳ ліҖнҷ” мӢңк°„мңјлЎң 1мҙҲл§ҲлӢӨ м•Ҫ 2.2 Hz мЈјнҢҢмҲҳк°Җ мғҒмҠ№лҗЁмқ„ мқҳлҜён•ҳкі y축мқҖ к°ҖмҶҚлҸ„кі„м—җм„ң м¶ңл ҘлҗҳлҠ” к°ҖмҶҚлҸ„ мёЎм •м№ҳлҘј мқҳлҜён•ңлӢӨ. Fig. 1м—җм„ң лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ мӢңк°„м—җ л”°лқј мЈјнҢҢмҲҳлҘј мҰқк°Җн•ҳл©° 1 g м •нҳ„нҢҢ 진лҸҷмқ„ мқёк°Җн•ң кІҪмҡ° м•Ҫ 500 Hz л¶Җк·јм—җм„ң к°ҖмһҘ нҒ¬кІҢ к°ҖмҶҚлҸ„кі„ м¶ңл Ҙмқҙ мҰқнҸӯлҗҳлҠ” кІғмқ„ нҷ•мқён• мҲҳ мһҲм—ҲлӢӨ. л”°лқјм„ң Fig. 1мқҳ к°ҖмҶҚлҸ„кі„лҠ” 500 Hzмқҳ кіө진 мЈјнҢҢмҲҳлҘј к°Җм§ҖлҠ” кІғмңјлЎң нҷ•мқё лҗҳм—ҲлӢӨ. LINSм—җ Fig. 1мқҳ нҠ№м„ұмқ„ к°Җм§ҖлҠ” к°ҖмҶҚлҸ„кі„лҘј нғ‘мһ¬н•ҳлҠ” кІҪмҡ° RLGмқҳ л””лҚ” мЈјнҢҢмҲҳмқё 350~1000 Hz лҢҖм—ӯм—җ к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳк°Җ мЎҙмһ¬н•ҳкІҢ лҗңлӢӨ. к·ёлҹ¬лҜҖлЎң кҙ‘кІҪлЎң кёёмқҙк°Җ 16 cm RLGлҘј м Ғмҡ©н•ҳлҠ” LINSм—җ Fig. 1мқҳ нҠ№м„ұмқ„ к°Җм§ҖлҠ” к°ҖмҶҚлҸ„кі„лҘј нғ‘мһ¬н•ҳлҠ” кІҪмҡ° л””лҚ” мҡҙлҸҷм—җ мқҳн•ҙ мӢқ (1)мқҳ к°ҖмҶҚлҸ„ мёЎм •м№ҳк°Җ Fig. 1кіј к°ҷмқҙ 500 Hz л¶Җк·јм—җм„ң 2.5л°° мқҙмғҒ мҰқнҸӯлҗ к°ҖлҠҘм„ұмқҙ мЎҙмһ¬н•Ёмқ„ мқҳлҜён•ңлӢӨ.
мӢңмҠӨн…ң л ҲлІЁм—җм„ңмқҳ к°ҖмҶҚлҸ„кі„ кіө진 мҳҒн–Ҙм„ұ 분м„қ
ліё м Ҳм—җм„ңлҠ” LINS мӢңмҠӨн…ң л ҲлІЁм—җм„ңмқҳ к°ҖмҶҚлҸ„кі„ кіө진 мҳҒн–Ҙм„ұ 분м„қкІ°кіјлҘј м ңмӢңн•ңлӢӨ. мӢңмҠӨн…ң л ҲлІЁ 분м„қмқҙлһҖ 3축мқҳ RLG/к°ҖмҶҚлҸ„кі„к°Җ кҙҖм„ұм„јм„ң мЎ°лҰҪмІҙм—җ мһҘм°©лҗң нӣ„ н•ӯлІ•м»ҙн“Ён„°лҘј нҶөн•ҳм—¬ 3축мқҳ кҙҖм„ұм„јм„ң мёЎм •м№ҳлҘј нҡҚл“қн•ҳм—¬ 분м„қн•ңлӢӨлҠ” мқҳлҜёмқҙлӢӨ.
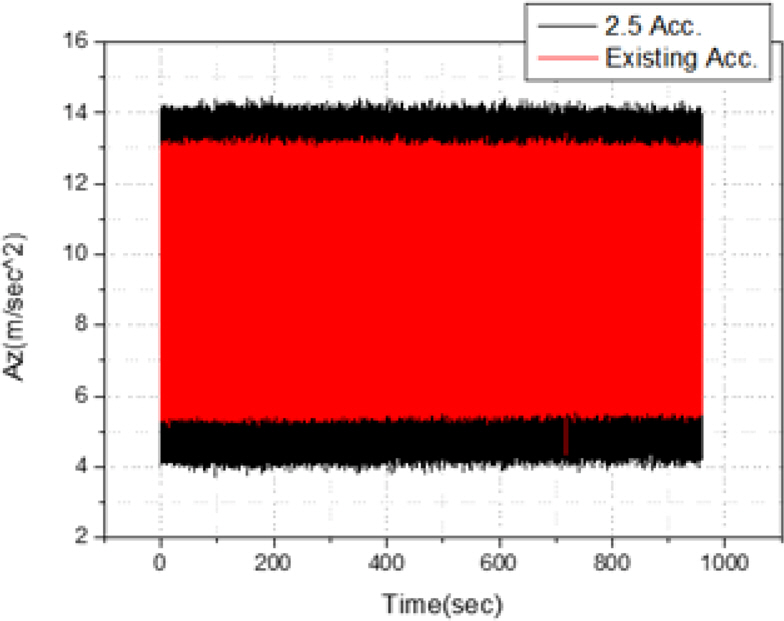
мӢңмҠӨн…ң л ҲлІЁм—җм„ңмқҳ к°ҖмҶҚлҸ„кі„ кіө진 мҳҒн–Ҙм„ұ 분м„қмқ„ мң„н•ҳм—¬ Fig. 1мқҳ кіө진 мЈјнҢҢмҲҳм—җм„ң 2.5л°° мҰқнҸӯлҘ нҠ№м„ұмқ„ к°Җм§ҖлҠ” к°ҖмҶҚлҸ„кі„мҷҖ 564(x축), 526(y축), 485(z축) Hz мқҳ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳлҘј к°Җм§ҖлҠ” RLGлҘј кҙҖм„ұн•ӯлІ•мһҘм№ҳм—җ мһҘм°©н•ҳкі м •м§Җ мғҒнғңм—җм„ң x, z축 진нҸӯ ліҖнҷ”лҘј нҷ•мқён•ң кІ°кіјлҘј к·ёлҰјмңјлЎң лӮҳнғҖлӮҙл©ҙ Fig. 2, 4мҷҖ к°ҷлӢӨ. к°ҖмҶҚлҸ„кі„ м¶ңл ҘмқҖ л””лҚ” мҡҙлҸҷмқ„ мҶҗмӢӨ м—Ҷмқҙ нҡҚл“қн•ҳкё° мң„н•ҳм—¬ 2400 HzлЎң мёЎм •н•ҳмҳҖлӢӨ. Fig. 2, 4м—җм„ң л¶үмқҖ мғүмңјлЎң лӮҳнғҖлӮё к°ҖмҶҚлҸ„ мёЎм •м№ҳлҠ” к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳк°Җ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳ мҳҒм—ӯмқ„ лІ—м–ҙлӮҳлҠ” м ңн’Ҳмқ„ мӮ¬мҡ©н•ң кІҪмҡ° мқҙкі кІҖм •мғүмқҖ Fig. 1м—җм„ң ліҙм—¬мӨҖ л°”мҷҖ к°ҷмқҙ 500 Hz л¶Җк·јмқҳ кіө진 мЈјнҢҢмҲҳлҘј к°Җм§ҖлҠ” к°ҖмҶҚлҸ„кі„лҘј мһҘм°©н•ҳм—¬ мӢңн—ҳн•ң кІ°кіјлҘј лӮҳнғҖлӮёлӢӨ. Fig. 1м—җм„ң лӢЁн’Ҳл ҲлІЁ кіө진 мЈјнҢҢмҲҳ 분м„қ мӢңн—ҳмқ„ нҶөн•ҳм—¬ кө¬н•ң кІ°кіјмҷҖ лҸҷмқјн•ҳкІҢ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳк°Җ к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳ мҳҒм—ӯ л¶Җк·јм—җ мЎҙмһ¬н•ҳлҠ” кІҪмҡ° к°ҖмҶҚлҸ„кі„ м¶ңл Ҙмқҙ мҰқнҸӯлҗҳлҠ” нҳ„мғҒмқҙ л°ңмғқн•ҳлҠ” кІғмқ„ Fig. 2, 4м—җм„ң ліј мҲҳ мһҲлӢӨ. Fig. 1кіј к°ҷмқҙ м •нҷ•н•ҳкІҢ к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳмҷҖ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳк°Җ кІ№м№ҳлҠ” кІҪмҡ° 2.5л°° к°Җк№Ңмқҙ м¶ңл Ҙмқҙ мҰқнҸӯлҗ кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ. к·ёлҹ¬лӮҳ Fig. 2, 4м—җм„ң 1.5, 1.25мқҳ мҰқнҸӯлҘ мқ„ ліҙмқҙлҠ” кІғмқҖ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳмҷҖ к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳк°Җ м •нҷ•н•ҳкІҢ мқјм№ҳн•ҳм§Җ м•Ҡм•„м„ң л°ңмғқн•ң л¬ём ңмқҙлӢӨ.

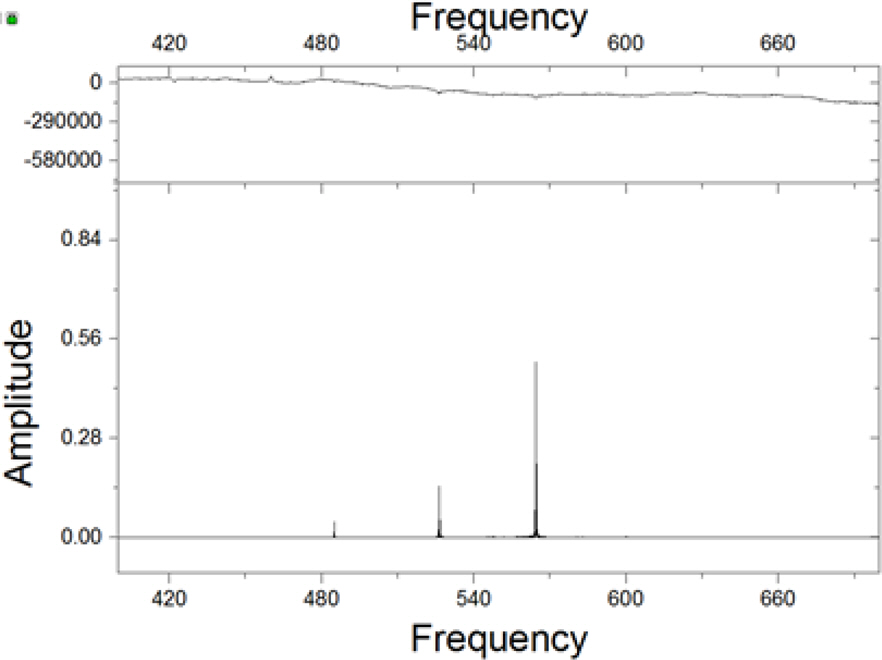
Fig. 2, 4м—җ лҢҖн•ң мЈјнҢҢмҲҳ нҠ№м„ұ 분м„қмқ„ мң„н•ҳм—¬ FFT (Fast Fourier Transform) мҲҳн–үкІ°кіјлҘј к·ёлҰјмңјлЎң лӮҳнғҖлӮҙл©ҙ Fig. 3, 5кіј к°ҷлӢӨ. Fig. 3, 5мқҖ x, z축мқҳ RLG л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳк°Җ 2400 HzлЎң нҡҚл“қлҗң x, z축мқҳ к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳлҘј FFTн•ҳл©ҙ мӢқлі„лҗ мҲҳ мһҲмқҢмқ„ ліҙм—¬мЈјлҠ” кІ°кіјмқҙл©° лҳҗн•ң 3축мқҳ л””лҚ” мҡҙлҸҷмқҙ лӘЁл“ 축мқҳ к°ҖмҶҚлҸ„кі„м—җм„ң мёЎм •лҗЁмқ„ мқҳлҜён•ҳлҠ” кІғмңјлЎң мӢқ (1)мқҙ нғҖлӢ№н•Ёмқ„ мҰқлӘ…н•ҳлҠ” кІ°кіјмқҙлӢӨ. Fig. 3, 5м—җм„ң мЈјлӘ©н•ҙм•ј н• лҳҗ лӢӨлҘё мӮ¬мӢӨмқҖ к°ҖмҶҚлҸ„кі„ 축별 мёЎм •м№ҳм—җм„ң л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳм—җ н•ҙлӢ№н•ҳлҠ” к°ҖмҶҚлҸ„ мёЎм •м№ҳмқҳ 진нҸӯмқҙ лӘЁл‘җ лӢӨлҘҙлӢӨлҠ” м җмқҙлӢӨ. Fig. 3мқҳ x축 к°ҖмҶҚлҸ„кі„мқҳ кІҪмҡ° 485(z축), 526 Hz(y 축) м„ұ분мқҳ 진нҸӯмқҙ, Fig. 5мқҳ z축 к°ҖмҶҚлҸ„кі„мқҳ кІҪмҡ° 564(x축), 526 Hz(y축) м„ұ분мқҳ 진нҸӯмқҙ нҒ¬кІҢ лӮҳмҳЁ кІғмңјлЎң нҷ•мқёлҗңлӢӨ. мқҙлҹ¬н•ң мӮ¬мӢӨмқҖ к°ҖмҶҚлҸ„кі„ 축과 лҸҷмқјн•ң RLG 축мқҳ л””лҚ” мҡҙлҸҷмқҖ к°ҖмҶҚлҸ„кі„м—җкІҢ нҡҢм „мҡҙлҸҷл§Ңмқ„ мқёк°Җн•ҳкё° л•Ңл¬ём—җ к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳм—җ RLG л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳ м„ұ분мқҙ мһ‘кІҢ мёЎм •лҗҳлҠ” кІғмңјлЎң нҷ•мқёлҗҳм—ҲлӢӨ.
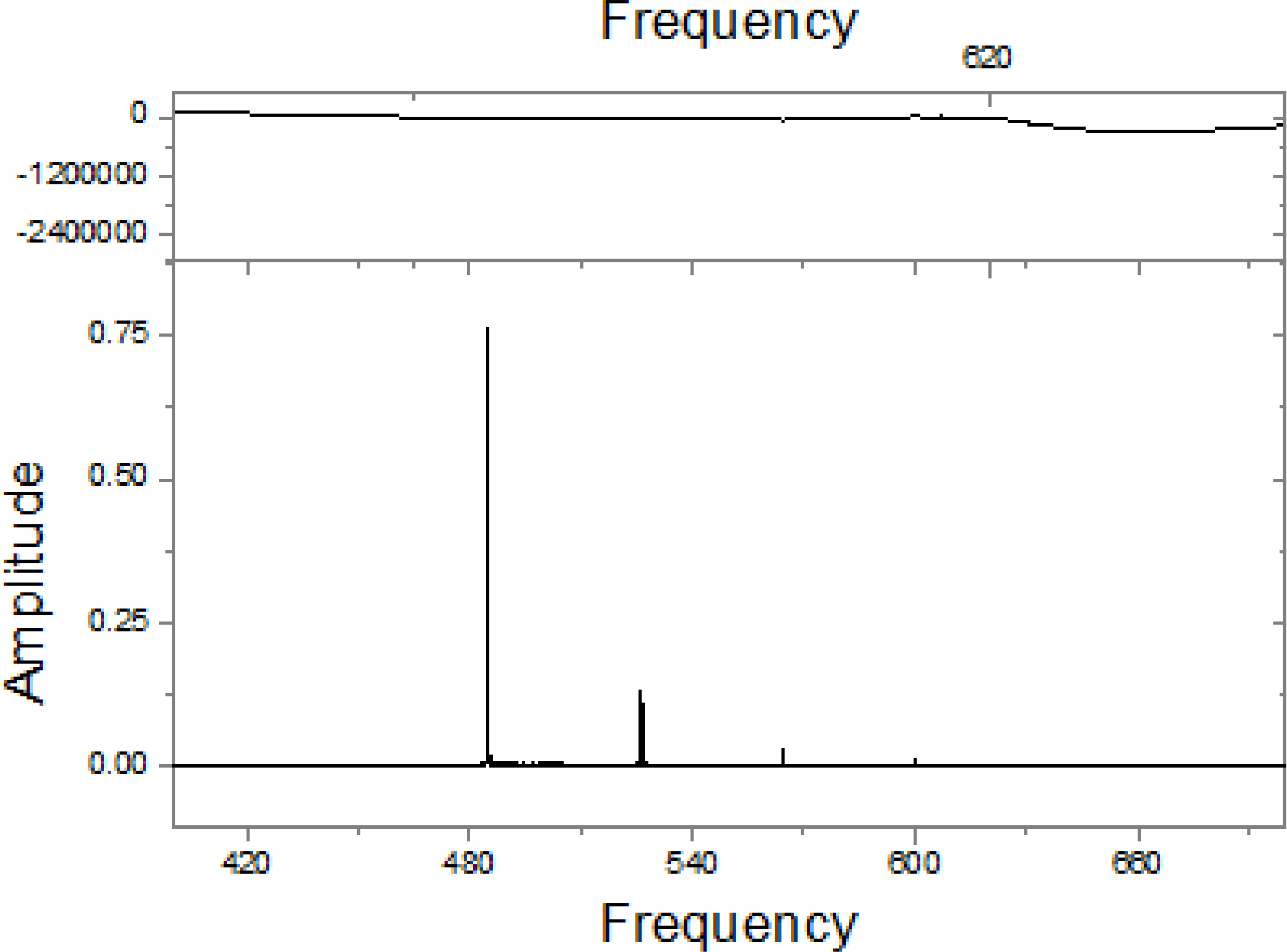
x축мқҳ к°ҖмҶҚлҸ„кі„ м¶ңл Ҙмқҳ FFT кІ°кіјмқё Fig. 3м—җ лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ x축 к°ҖмҶҚлҸ„кі„ м¶ңл ҘмқҖ 500 Hz л¶Җк·јм—җм„ң 15~ 25 Hz мқҙкІ©лҗң мЈјнҢҢмҲҳ м„ұ분мқё 485(z축), 526 Hz(y축) л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳ м¶ңл Ҙмқҙ мЈјмҡ” м„ұ분мқҙлҜҖлЎң м•Ҫ 1.5л°°мқҳ мҰқнҸӯлҘ мқ„ к°Җм§ҖлӮҳ к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳмҷҖ 64 Hz мқҙкІ©лҗң 564 Hz(x축) л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳ м¶ңл Ҙмқҙ мЈјмҡ” м„ұ분мқё Fig. 4мқҳ z축 к°ҖмҶҚлҸ„кі„ м¶ңл ҘмқҖ м•Ҫ 1.25л°°мқҳ мҰқнҸӯлҘ мқ„ к°Җм§ҖлҠ” кІғмңјлЎң нҷ•мқёлҗҳм—ҲлӢӨ. мқҙлҹ¬н•ң мӮ¬мӢӨмқҖ кіө진 мЈјнҢҢмҲҳмҷҖмқҳ мқҙкІ© мЈјнҢҢмҲҳк°Җ м»Өм§ҲмҲҳлЎқ мҰқнҸӯлҘ мқҙ к°җмҶҢн•ҳлҠ” кІғмқ„ ліҙм—¬мЈјлҠ” кІғмңјлЎң Fig. 1мқҳ к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳ 분м„қ кІ°кіјмҷҖ лҸҷмқјн•ң кІ°кіјлҘј лӮҳнғҖлӮҙкі мһҲмңјлҜҖлЎң мқҙлҹ¬н•ң мӮ¬мӢӨмқҖ Fig. 1мқҳ к°ҖмҶҚлҸ„кі„ кіө진 мЈјнҢҢмҲҳ 분м„қ кІ°кіјк°Җ м •нҷ•н•Ёмқ„ мҰқлӘ…н•ҳлҠ” кІ°кіјмқҙлӢӨ.
л””лҚ” мҡҙлҸҷм—җ мқҳн•ҙ л°ңмғқн•ң к°ҖмҶҚлҸ„кі„ кіө진мқҙ LINS н•ӯлІ•м„ұлҠҘм—җ лҜём№ҳлҠ” мҳҒн–Ҙмқ„ нҷ•мқён•ҳкё° мң„н•ҙм„ң мӢӨм ң н•ӯлІ• кі„мӮ° мЈјкё°м—җ н•ҙлӢ№н•ҳлҠ” лҚ°мқҙн„°лЎңмқҳ ліҖнҷҳмқҙ н•„мҡ”н•ҳлӢӨ. мқјл°ҳм ҒмңјлЎң 2400 HzмҷҖ к°ҷмқҖ кі мҶҚмқҳ лҚ°мқҙн„° мғҳн”Ңл§ҒмқҖ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳмқҳ мҷңкіЎмқ„ н”јн•ҳкұ°лӮҳ лҸҷм ҒмҳӨм°ЁлҘј ліҙмғҒн•ҳкё° мң„н•ҙ н•„мҡ”н•ң кІғмңјлЎң мӢӨм ң н•ӯлІ• кі„мӮ°мқ„ мң„н•ҙм„ңлҠ” к·ёліҙлӢӨ лӮ®мқҖ мғҳн”Ңл§Ғ мЈјнҢҢмҲҳк°Җ н•„мҡ”н•ҳлӢӨ[2]. ліё л…јл¬ём—җм„ңлҠ” н•ӯлІ• кі„мӮ° мЈјкё°лҘј 200 HzлЎң к°Җм •н•ҳм—¬ 분м„қмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. 2400 Hz лҚ°мқҙн„°мқҳ 200 HzлЎңмқҳ ліҖнҷҳмқҖ 2400 HzлЎң мғҳн”Ңл§Ғлҗң 12к°ң лҚ°мқҙн„°лҘј лҚ”н•ҳм—¬ 200 HzлЎң ліҖнҷҳн•ҳм—¬ н•ӯлІ• кі„мӮ°м—җ мӮ¬мҡ©н•ңлӢӨкі к°Җм •н•ҳм—¬ мқҙлҘј мӢқмңјлЎң мң лҸ„н•ҳл©ҙ мӢқ (2)мҷҖ к°ҷлӢӨ. мӢқ (2)м—җм„ң ОҙT лҠ” кі мҶҚмқҳ лҚ°мқҙн„° мғҳн”Ңл§Ғ мЈјкё°мқё 1 2400
мӢқ (2)м—җм„ң л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳ л°Ҹ 진нҸӯ, н•ӯлІ• кі„мӮ°мЈјкё°лҠ” мғҒмҲҳмқҙлҜҖлЎң 2400 Hz лҚ°мқҙн„°лҘј 200 Hz н•ӯлІ• кі„ мӮ°мЈјкё°лЎң ліҖнҷҳн•ҳлҠ” кіјм •м—җм„ңмқҳ 진нҸӯ к°җмҮ„мңЁмқ„ кІ°м •н•ҳлҠ” м„ұ분мқё мҪ”мӮ¬мқё м„ұ분мқҖ мӢқ (3), мӮ¬мқё м„ұ분мқҖ мӢқ (4)мҷҖ к°ҷлӢӨ.
мӢқ (3), (4)мқҳ нҠ№м„ұмқ„ мғҒм„ён•ҳкІҢ 분м„қн•ҳкё° мң„н•ҳм—¬ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳмқё wiмқ„ 350 Hzм—җм„ң 700 Hzк№Ңм§Җ к°ҖліҖн•ҳл©ҙм„ң кі„мӮ°н•ҳм—¬ к·ёлҰјмңјлЎң лӮҳнғҖлӮҙл©ҙ Fig. 6, 7мҷҖ к°ҷлӢӨ. Fig. 6, 7мқҖ н•ӯлІ• кі„мӮ°мЈјкё°лҘј 200 HzлЎң к°Җм •н–Ҳмқ„ л•Ңмқҳ 진нҸӯ к°җмҮ„мңЁмқҙ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳм—җ л”°лқј лӢ¬лқјм§ҖлҠ” кІғмқ„ ліҙм—¬мЈјкі мһҲлӢӨ.


мӢқ (3), (4) л°Ҹ Fig. 6, 7мқҙ м •нҷ•н•ҳкІҢ мң лҸ„лҗҳм—ҲлҠ”м§ҖлҘј кІҖмҰқн•ҳкё° мң„н•ҳм—¬ LINSм—җм„ң м¶ңл Ҙлҗң 3축мқҳ 2400 Hz к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳлҘј нӣ„мІҳлҰ¬н•ҳм—¬ 200 Hz лҚ°мқҙн„°лЎң ліҖнҷҳн•ң кІ°кіјлҘј мғҒнҳё 비көҗн•ҳм—¬ к·ёлҰјмңјлЎң лӮҳнғҖлӮҙл©ҙ Fig. 8~10мҷҖ к°ҷлӢӨ. Fig. 8~10лҠ” 2400 Hz лҚ°мқҙн„°лҘј 200 HzлЎң ліҖнҷҳн•ҳл©ҙ 진нҸӯмқҙ к°җмҶҢн•Ёмқ„ ліҙм—¬мЈјкі мһҲлӢӨ. Fig. 8~10мқҳ 진нҸӯ к°җмҮ„мңЁмқҙ мӢқ (3), (4)м—җм„ң кі„мӮ°лҗң 진нҸӯ к°җмҮ„мңЁкіј лҸҷмқјн•ңм§Җ кІҖмҰқн•ҳкё° мң„н•ҳм—¬ Fig. 3м—җ лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ x축 к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳмқҳ мЈјмҡ” л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳмқё 485HzлҘј мӢқ (3), (4)м—җ лҢҖмһ…н•ҳм—¬ 진нҸӯ к°җмҮ„мңЁмқ„ кі„мӮ°н•ҳмҳҖлӢӨ. кі„мӮ° кІ°кіј мҪ”мӮ¬мқё м„ұ분мқҖ 0.12 мӮ¬мқё м„ұ분мқҖ 0.03мқҙ мқҙлЎ м ҒмңјлЎң к°җмҮ„н•ҳлҠ” кІғмңјлЎң лӮҳнғҖлӮ¬мңјл©° мқҙлҹ¬н•ң кІҪмҡ° мөңмҶҢ 진нҸӯ к°җмҮ„мңЁмқ„ кі„мӮ°н•ҳл©ҙ x축мқҳ мқҙлЎ м Ғмқё 진нҸӯ к°җмҮ„мңЁмқҖ м•Ҫ 0.128мқҙ лҗңлӢӨ. Fig. 8мқҳ мӢңн—ҳмқ„ нҶөн•ҳм—¬ мёЎм •лҗң x축 к°ҖмҶҚлҸ„кі„ м¶ңл Ҙмқҳ 진нҸӯ к°җмҮ„мңЁмқ„ кі„мӮ°н•ҳл©ҙ к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳ 진нҸӯмқҙ 4.3м—җм„ң 0.5лЎң к°җмҮ„лҗҳм–ҙ м•Ҫ 0.12л°°мқҳ к°җмҮ„мңЁмқ„ ліҙмқҙлҠ” кІғмқ„ нҷ•мқён•ҳмҳҖлӢӨ. мқҙлҹ¬н•ң кІ°кіјлҠ” мқҙлЎ м ҒмңјлЎң кі„мӮ°н•ң кІ°кіјмҷҖ кұ°мқҳ лҸҷмқјн•ң кІ°кіјлЎң мқҙлЎ м ҒмңјлЎң 분м„қн•ң кІ°кіјк°Җ нғҖлӢ№н•Ёмқ„ мҰқлӘ…н•ҳлҠ” кІғмқҙлӢӨ. к°җмҮ„мңЁм—җм„ң м•Ҫк°„мқҳ м°Ёмқҙк°Җ л°ңмғқн•ҳлҠ” кІғмқҖ x축мқҳ кІҪмҡ° Fig. 3м—җ лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ 485 Hz(z축) м„ұ분мқҳ л””лҚ” мҡҙлҸҷмқҙ мЈјмҡ”н•ҳкІҢ мҳҒн–Ҙмқ„ лҜём№ҳлӮҳ 526 Hz(y축) м„ұ분мқҳ л””лҚ” мҡҙлҸҷлҸ„ мЎҙмһ¬н•ңлӢӨ. к·ёлҹ¬лӮҳ мқҙлЎ м ҒмңјлЎң кі„мӮ°н•ң к°җмҮ„мңЁмқҖ 485 Hz(z축) м„ұ분л§Ңмқҙ мЎҙмһ¬н•ңлӢӨкі к°Җм •н•ҳм—¬ кі„мӮ°н–Ҳкё° л•Ңл¬ём—җ л°ңмғқн•ң кІғмңјлЎң н•ҙм„қлҗҳм—ҲлӢӨ.
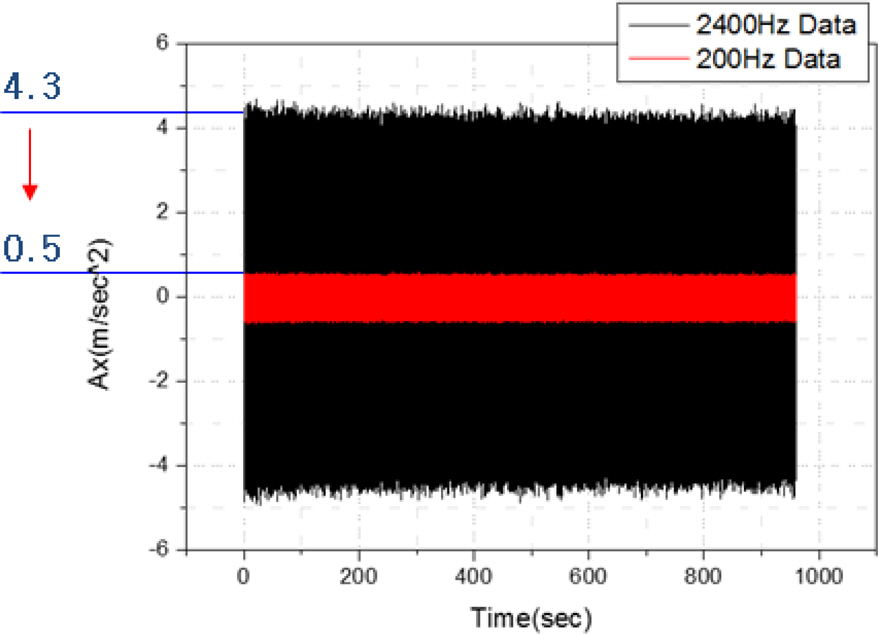
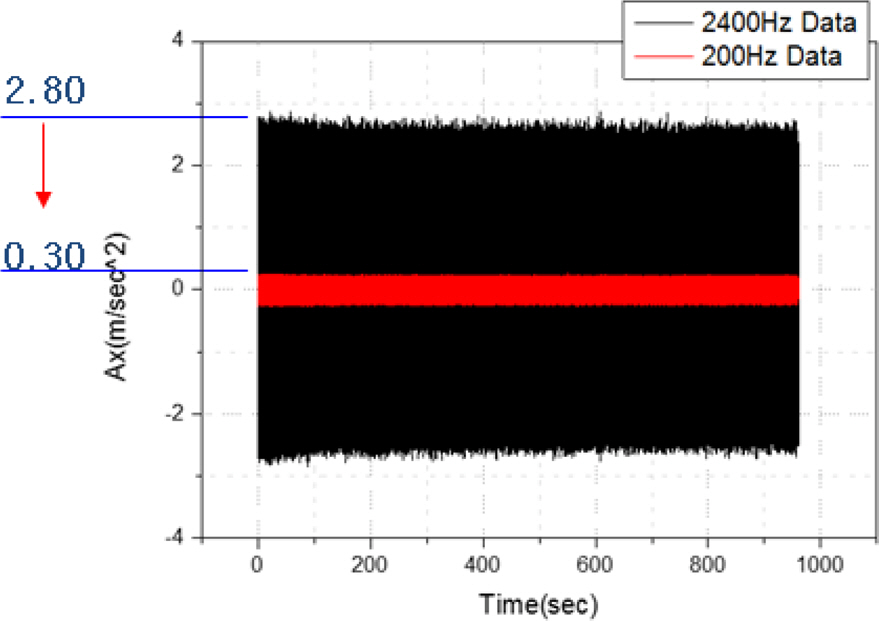
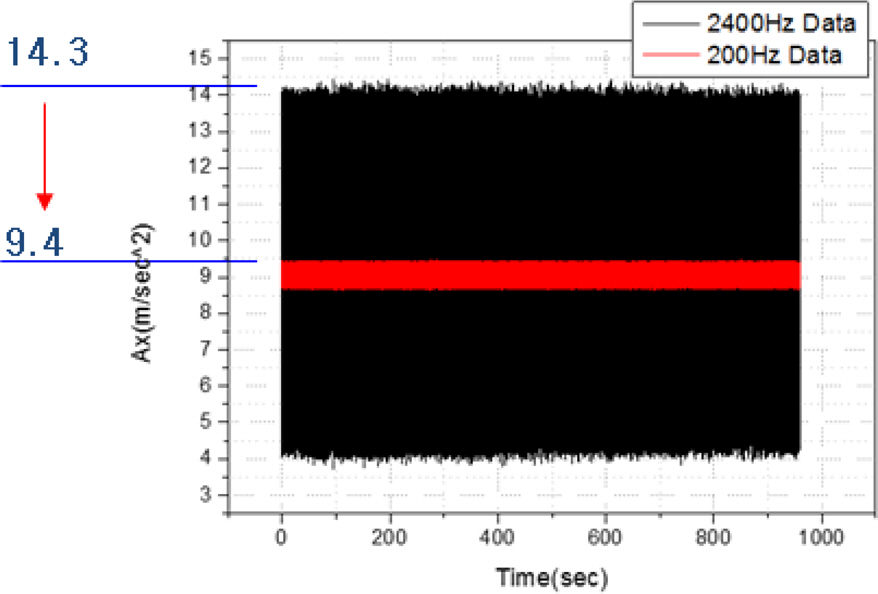
Fig. 8мқҳ x축과 л§Ҳм°¬к°Җм§ҖлЎң Fig. 9, 10мқҳ y, z축м—җ лҢҖн•ҳм—¬ лҸҷмқјн•ҳкІҢ 분м„қмқ„ н•ң кІ°кіј y축мқҳ кІҪмҡ° м•Ҫ 0.11л°° z축мқҳ кІҪмҡ° мӨ‘л Ҙ к°ҖмҶҚлҸ„ м„ұ분мқ„ м ңмҷён•ң 진нҸӯ к°җмҮ„мңЁмқҖ м•Ҫ 0.08л°°мқҳ к°җмҮ„мңЁмқ„ ліҙмқҙлҠ” кІғмңјлЎң лӮҳнғҖлӮ¬лӢӨ. мӢқ (3), (4)лҘј мқҙмҡ©н•ҳм—¬ 526, 564 Hzм—җ лҢҖн•ң мқҙлЎ м Ғмқё 진нҸӯ к°җмҮ„мңЁмқ„ кө¬н•ҳл©ҙ мҪ”мӮ¬мқё м„ұ분мқҖ к°Ғк°Ғ 0.1, 0.03 мӮ¬мқё м„ұ분мқҖ к°Ғк°Ғ вҲ’0.044, вҲ’0.05лЎң кі„мӮ°лҗҳл©° мқҙлҹ¬н•ң кІҪмҡ° мөңмҶҢ 진нҸӯ к°җмҮ„мңЁмқ„ кі„мӮ°н•ҳл©ҙ к°Ғк°Ғ м•Ҫ 0.11, 0.06мқҙ лҗңлӢӨ. Fig. 9мқҳ y축мқҳ кІҪмҡ° 485, 564 Hz м„ұ분мқҙ лҸҷмӢңм—җ мЎҙмһ¬н•ҳлӮҳ 485 Hz м„ұ분мқҙ мЈјмҡ” м„ұ분мқҙлҜҖлЎң мқҙлЎ м Ғмқё 진нҸӯ к°җмҮ„мңЁмқё 0.128м—җ к·јм ‘н• кІғмңјлЎң нҢҗлӢЁлҗҳм—Ҳмңјл©° Fig. 9лҠ” мқҙмҷҖ к°ҷмқҖ кІ°кіјлҘј ліҙм—¬мЈјкі мһҲлӢӨ.
Fig. 10мқҳ z축мқҳ кІҪмҡ° Fig. 5м—җ лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ 526, 564 Hz м„ұ분мқҙ лҸҷмӢңм—җ мЎҙмһ¬н•ҳлӮҳ 564 Hz м„ұ분мқҙ мЈјмҡ” м„ұ분мқҙлҜҖлЎң мқҙлЎ м Ғмқё 진нҸӯ к°җмҮ„мңЁмқё 0.06м—җ к·јм ‘н• кІғмңјлЎң нҢҗлӢЁлҗҳм—Ҳмңјл©° Fig. 10м—җм„ң мӨ‘л Ҙк°ҖмҶҚлҸ„ м„ұ분мқ„ м ңмҷён•ҳкі мҲңмҲҳн•ң 진нҸӯ ліҖнҷ”л§Ңмқ„ к°Җм •н•ң 진нҸӯ к°җмҮ„мңЁмқ„ кі„мӮ°н•ҳл©ҙ мқҙлЎ м Ғмқё мҲҳм№ҳмҷҖ мң мӮ¬н•Ёмқ„ ліҙм—¬мЈјкі мһҲлӢӨ. мқҙмҷҖ к°ҷмқҙ мқҙлЎ м ҒмңјлЎң кі„мӮ°н•ң 진нҸӯ к°җмҮ„мңЁ кі„мӮ° кІ°кіјмҷҖ мӢңн—ҳм ҒмңјлЎң мёЎм •лҗң кІ°кіјк°Җ мң мӮ¬н•ҳкІҢ лӮҳмҳЁ кІғмңјлЎң нҢҗлӢЁн• л•Ң ліё л…јл¬ёмқҳ н•ҙм„қкІ°кіјлҠ” м •нҷ•н•ҳлӢӨкі н• мҲҳ мһҲлӢӨ. мқҙлҹ¬н•ң кІ°кіјлҘј к·јкұ°лЎң нҢҗлӢЁн• л•Ң л””лҚ” мҡҙлҸҷм—җ мқҳн•ң к°ҖмҶҚлҸ„кі„ кіө진мқҙ к°ҖмҶҚлҸ„кі„ м¶ңл Ҙмқ„ мҰқнҸӯмӢңнӮӨлҚ”лқјлҸ„ н•ӯлІ• кі„мӮ° мЈјкё°лЎң лҚ°мқҙн„°лҘј ліҖнҷҳн•ҳлҠ” кіјм •м—җм„ң 진нҸӯ к°җмҮ„мңЁмқҙ нҒ¬кё° л•Ңл¬ём—җ н•ӯлІ•м„ұлҠҘм—җлҠ” лҜём№ҳлҠ” мҳҒн–ҘмқҖ нҒ¬кІҢ к°җмҶҢн• кІғмңјлЎң нҷ•мқёлҗҳм—ҲлӢӨ.
к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң м •л ¬/н•ӯлІ• м„ұлҠҘ 분м„қ
ліё м Ҳм—җм„ңлҠ” л””лҚ” мҡҙлҸҷм—җ мқҳн•ң к°ҖмҶҚлҸ„кі„ кіө진мңјлЎңмҰқнҸӯлҗң к°ҖмҶҚлҸ„ мёЎм •м№ҳк°Җ кҙҖм„ұн•ӯлІ•мһҘм№ҳмқҳ мһҗмІҙ м •л ¬ л°Ҹ н•ӯлІ•м—җ лҜём№ҳлҠ” мҳҒн–Ҙмқ„ мқҙлЎ м ҒмңјлЎң 분м„қн•ң лӮҙмҡ©мқ„ кё°мҲ н•ңлӢӨ.
5.1 к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң мһҗмІҙ м •л ¬ м„ұлҠҘ 분м„қ
л””лҚ” мҡҙлҸҷм—җ мқҳн•ҙ л°ңмғқлҗҳлҠ” м •нҳ„нҢҢ к°ҖмҶҚлҸ„ мёЎм •м№ҳм—җ лҢҖн•ң 2м°Ё кі м •мқҙл“қ л°©мӢқмқҳ мһҗмІҙ м •л ¬м—җ лҢҖн•ң м„ұлҠҘ분м„қ кІ°кіјлҠ” м°ёкі л¬ён—Ң [6]м—җм„ң мһҗм„ёнһҲ кё°мҲ лҗҳм–ҙ мһҲм–ҙ ліё л…јл¬ём—җм„ңлҠ” к°ҖмҶҚлҸ„кі„ кіө진과 кҙҖл Ёлҗң лӮҙмҡ©л§Ңмқ„ м°ёкі л¬ён—Ң [6]мқҳ н•ҙм„қ кІ°кіјлҘј кё°л°ҳмңјлЎң 추к°Җ кё°мҲ н•ңлӢӨ.
мқјл°ҳм ҒмңјлЎң 2м°Ё м ңм–ҙкё°лҘј мқҙмҡ©н•ң кі м •мқҙл“қ л°©мӢқмқҳ м •л ¬лЈЁн”„лҠ” Fig. 11кіј к°ҷмқҙ лӮҳнғҖлӮј мҲҳ мһҲлӢӨ[6,8,9]. к·ёлҰјм—җм„ң лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ н•ӯлІ•мўҢн‘ңкі„м—җм„ң мҲҳнҸү축 к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳ fbк°Җ мҳҒмқҙ лҗҳлҸ„лЎқ 2м°Ё м ңм–ҙкё°лҘј мқҙмҡ©н•ҳм—¬ м ңм–ҙмӢ нҳё(Пү E e Пү N e C b m О© i b b
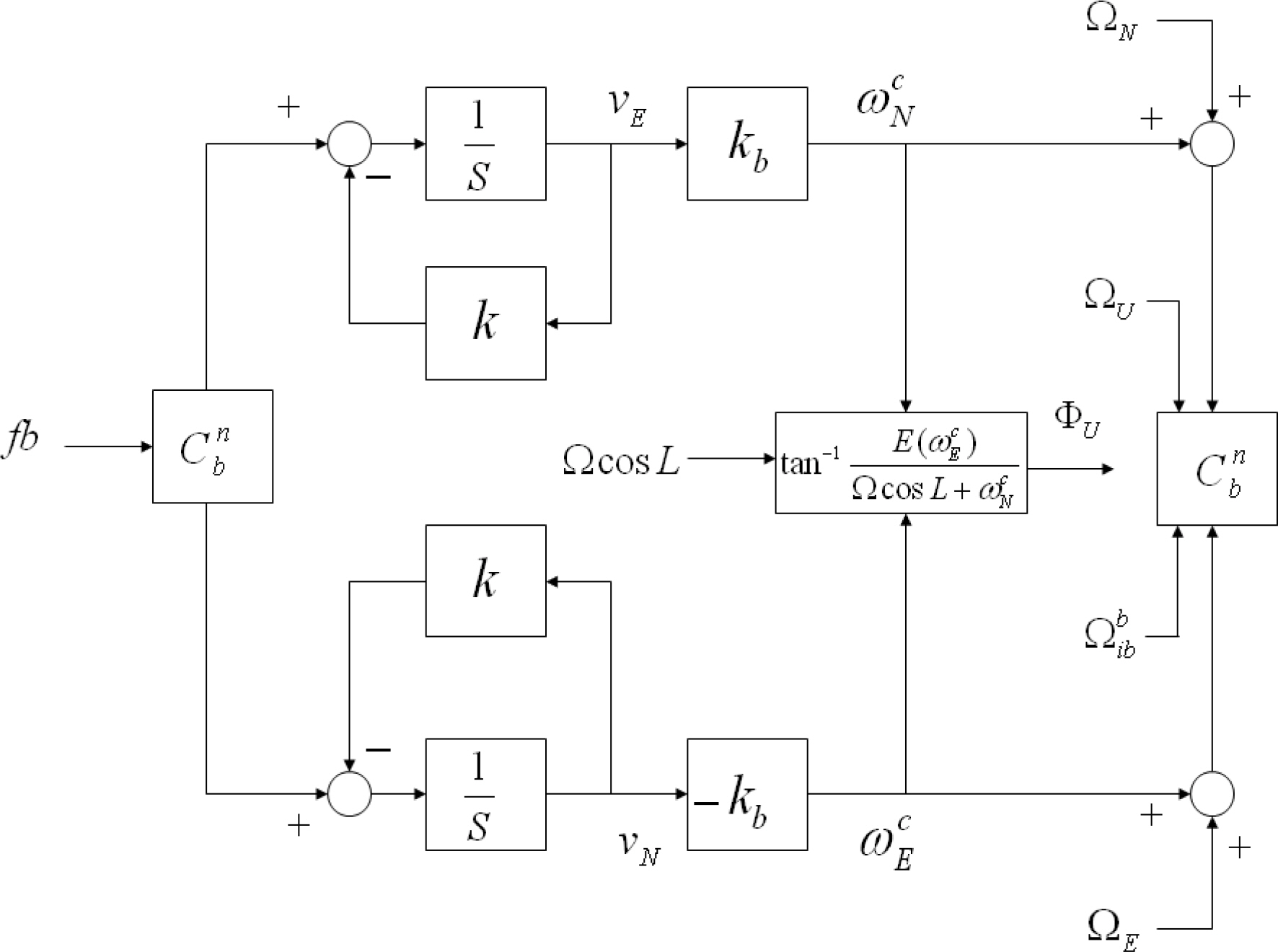
м •л ¬лЈЁн”„ н•ҙм„қмқ„ мң„н•ҙм„ңлҠ” м •л ¬лЈЁн”„м—җ лҢҖн•ң мҳӨм°Ёл°©м •мӢқмқҙ мҡ”кө¬лҗҳл©° мқҙлҘј к·ёлҰјмңјлЎң лӮҳнғҖлӮҙл©ҙ Fig. 12мҷҖ к°ҷкі мқҙлҘј мӢқмңјлЎң лӮҳнғҖлӮҙл©ҙ мӢқ (5), (6)мҷҖ к°ҷлӢӨ[6]. мӢқ (5), (6)м—җм„ң gлҠ” мӨ‘л Ҙ к°ҖмҶҚлҸ„, ОҙaE, ОҙaNмқҖ к°ҖмҶҚлҸ„ мҳӨм°Ё, ОҙПүE, ОҙПүNмқҖ RLG мҳӨм°Ё, ОҙvE, ОҙvNмқҖ мҶҚлҸ„мҳӨм°Ё, ОҰE, ОҰNмқҖ мһҗм„ёмҳӨм°ЁлҘј мқҳлҜён•ңлӢӨ.
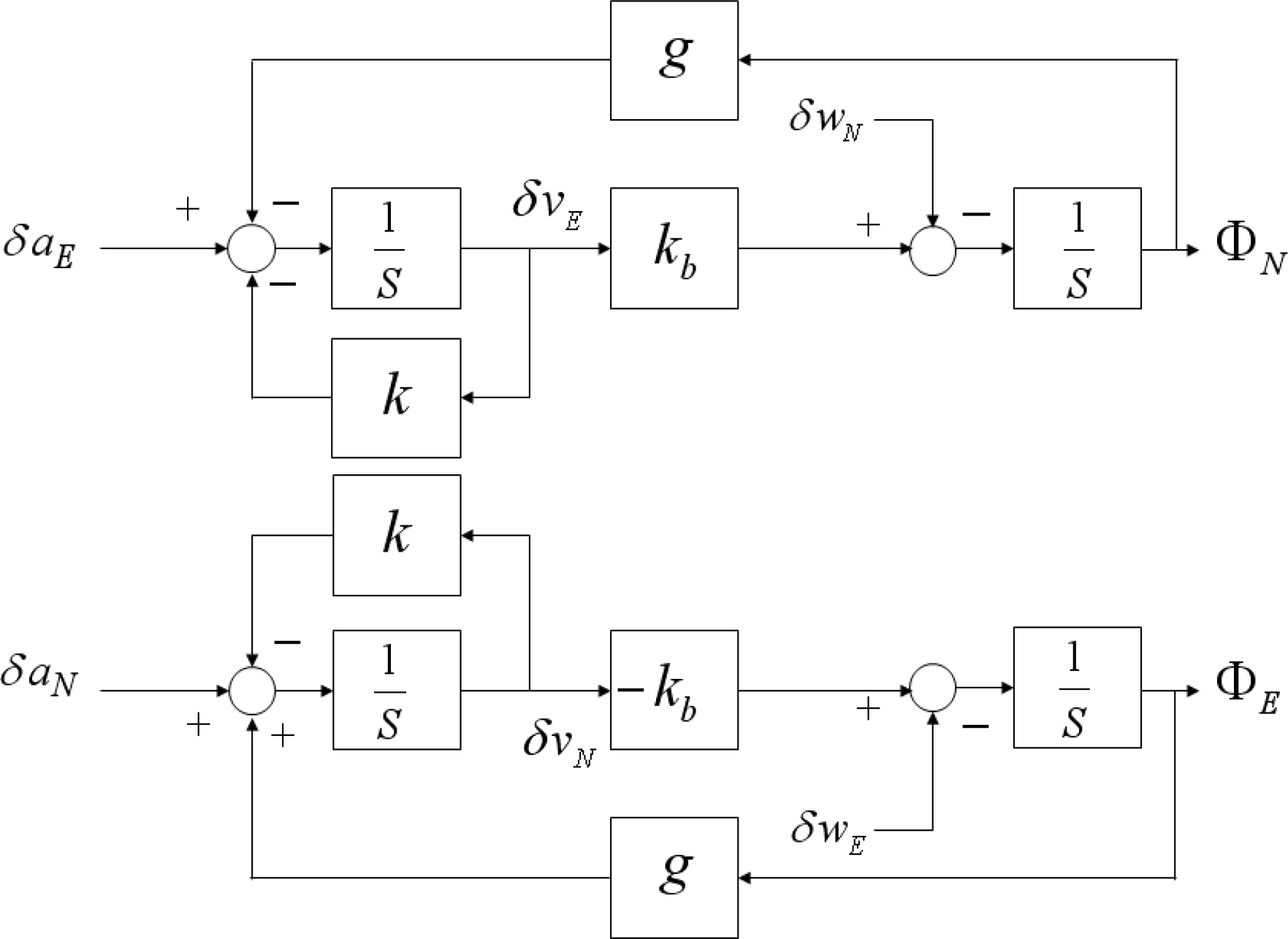
мӢқ (5), (6)м—җм„ң л””лҚ” мҡҙлҸҷм—җ мқҳн•ң м •нҳ„нҢҢ к°ҖмҶҚлҸ„ мёЎм •м№ҳм—җ мқҳн•ң мһҗмІҙ м •л ¬ м„ұлҠҘ 분м„қл§Ңмқ„ ліё л…јл¬ём—җм„ңлҠ” мҲҳн–үн•ҳкё° л•Ңл¬ём—җ RLG мҳӨм°ЁлҠ” м—ҶлӢӨкі к°Җм •н•ҳкі мӢқ (5), (6)лҘј лқјн”ҢлқјмҠӨ ліҖнҷҳмқ„ нҶөн•ҳм—¬ м •лҰ¬н•ҳл©ҙ мӢқ (7) ~ (10)кіј к°ҷлӢӨ[6]. мӢқ (7) ~ (10)м—җм„ң ОҙaE(s), ОҙaN(s)лҠ” лқјн”ҢлқјмҠӨ ліҖнҷҳлҗң E, N축 м •нҳ„нҢҢ к°ҖмҶҚлҸ„ мёЎм •м№ҳлҘј мқҳлҜён•ңлӢӨ.
мң„ мҲҳмӢқм—җм„ң лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ м •л ¬мқ„ мң„н•ң 2м°Ё м ңм–ҙкё°лҠ” к°ҖмҶҚлҸ„кі„ мҳӨм°Ём—җ лҢҖн•ң мҶҚлҸ„ л°Ҹ мһҗм„ёмҳӨм°Ёмқҳ кҙҖкі„мӢқмқҙ 2м°Ё м Җм—ӯнҶөкіј н•„н„°мқҳ кө¬мЎ°лҘј лӮҳнғҖлӮҙлҠ” кІғмқ„ нҷ•мқён• мҲҳ мһҲмңјл©° м Ҳм җ мЈјнҢҢмҲҳ(corner frequency) w c = k b g
лҸҷмІҙ мўҢн‘ңкі„м—җм„ң лӘЁлҚёл§Ғлҗң LINS к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳ лӘЁлҚё мӢқмқё мӢқ (1)мқ„ н•ӯлІ• кі„мӮ°мЈјкё° в–іT лЎң мғҳн”Ңл§Ғн•ҳлҠ” кІҪмҡ°м—җ лҢҖн•ң мӢқ (2)лҘј мўҢн‘ңліҖнҷҳн–үл ¬мқ„ нҶөн•ҳм—¬ н•ӯлІ•мўҢн‘ңкі„лЎң ліҖнҷҳн•ҳм—¬ м •лҰ¬н•ҳл©ҙ мӢқ (11)кіј к°ҷмқҙ мғҲлЎңмҡҙ л°©м •мӢқмқҙ мң лҸ„лҗңлӢӨ[7]. мӢқ (11)мқҖ м—°мҶҚ мӢ нҳёлҘј мқҙмӮ° мӢ нҳёлЎң л§Ңл“Өкё° мң„н•ң мғҳн”Ңл§Ғ мқҙлЎ м—җ мқҳкұ° мӢқ (2)мқ„ кё°л°ҳмңјлЎң н•ҳм—¬ мң лҸ„лҗҳм—Ҳмңјл©° н•ҙм„қмқҳ нҺёмқҳм„ұмқ„ мң„н•ҙм„ң мҡ°м„ мқҖ мӮ¬мқё м„ұ분л§Ңмқҙ мЎҙмһ¬н•ңлӢӨкі к°Җм •н•ҳмҳҖлӢӨ. мӢқ (11)м—җм„ң мЈјнҢҢмҲҳ ПүAi(=2ПҖfAi)лҠ” л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳк°Җ мқјл°ҳм ҒмңјлЎң н•ӯлІ• кі„мӮ°мЈјкё°ліҙлӢӨ нҒ¬кё° л•Ңл¬ём—җ мң„мӢ нҳё нҳ„мғҒ(Aliasing)м—җ мқҳн•ҙ мӢқ (1)м—җм„ң лӮҳнғҖлӮң л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳ(Пү)мҷҖ мӢқ (2)мқҳ н•ӯлІ• кі„мӮ°мЈјкё°(Пүs)мқҳ л°°мҲҳ мЈјнҢҢмҲҳмҷҖмқҳ м°Ё(ПүAi=ПүВұiГ—Пүs)м—җ мқҳн•ҙм„ң мғқм„ұлҗң мЈјнҢҢмҲҳмқҙлӢӨ[7]. к·ёлҰ¬кі 진нҸӯ AimмқҖ мӢқ (2)м—җм„ң мң лҸ„лҗң л°”мҷҖ к°ҷмқҙ л””лҚ”мҡҙлҸҷм—җ мқҳн•ҙм„ң мғқм„ұлҗң к°ҖмҶҚлҸ„ мёЎм •м№ҳмқҳ 진нҸӯмңјлЎң мўҢн‘ңліҖнҷҳ л°Ҹ н•ӯлІ• кі„мӮ°мЈјкё° л“ұм—җ мқҳн•ҙм„ң мӢқ (3), (4)мҷҖ к°ҷмқҙ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳ лі„лЎң лӢӨлҘё нҒ¬кё°лҘј к°Җ진лӢӨ.
л””лҚ” мҡҙлҸҷм—җ мқҳн•ң м •нҳ„нҢҢ к°ҖмҶҚлҸ„ мёЎм •м№ҳм—җ мқҳн•ң м •л ¬лЈЁн”„ м„ұлҠҘ н•ҙм„қмқ„ мң„н•ҳм—¬ мӢқ (11)мқ„ (8), (9)м—җ лҢҖмһ…н•ҳкі м—ӯ лқјн”ҢлқјмҠӨ ліҖнҷҳн•ҳм—¬ м •лҰ¬н•ҳл©ҙ мӢқ (12), (13)мҷҖ к°ҷлӢӨ.
мӢқ (12), (13)м—җм„ң AОҰ1, AОҰ2, AОҙv1, AОҙv2н•ӯмқҖ мӢңк°„мқҙ кІҪкіјн•Ём—җ л”°лқј к°җмҮ„лҗҳлҠ” н•ӯмңјлЎң м •мғҒмғҒнғңм—җм„ң мһҗмІҙ м •л ¬ м„ұлҠҘм—җ мҳҒн–Ҙмқ„ лҜём№ҳм§Җ м•ҠмңјлӮҳ к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳмқҳ м •нҳ„нҢҢ м„ұ분мқҖ мӢңк°„м—җ кҙҖкі„м—Ҷмқҙ кі„мҶҚн•ҙм„ң мҶҚлҸ„ л°Ҹ мһҗм„ё мҳӨм°Ём—җ мҳҒн–Ҙмқ„ лҜём№ҳлҠ” кІғмқ„ нҷ•мқён• мҲҳ мһҲлӢӨ. мӢқ (12), (13)м—җм„ң м •нҳ„нҢҢ м„ұ분мқҳ 진нҸӯмқ„ лӮҳнғҖлӮҙлҠ” кі„мҲҳлҘј м •лҰ¬н•ҳл©ҙ м•„лһҳмҷҖ к°ҷлӢӨ[6].
мӢқ (14), (15)лЎңл¶Җн„° м•Ң мҲҳ мһҲл“Ҝмқҙ м •л ¬лЈЁн”„м—җм„ң м •нҳ„нҢҢ к°ҖмҶҚлҸ„ мёЎм •м№ҳм—җ мқҳн•ҙ л°ңмғқлҗҳлҠ” мҶҚлҸ„ л°Ҹ мҲҳнҸү축 мһҗм„ё мҳӨм°ЁлҠ” мӢқ (11)мқҳ м •нҳ„нҢҢ мҡҙлҸҷ мЈјнҢҢмҲҳ л°Ҹ 진нҸӯкіј м •л ¬лЈЁн”„ нҠ№м„ұм—җ мқҳн•ҳм—¬ кІ°м •лҗЁмқ„ м•Ң мҲҳ мһҲлӢӨ. мҲҳм§Ғ축 мһҗм„ёмҳӨм°Ё ОҰUлҠ” Fig. 2м—җм„ң лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ Пү E c
мӢқ (16)м—җм„ң лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ мҲҳм§Ғ축 мһҗм„ёмҳӨм°ЁлҸ„ мҲҳнҸү축과 мң мӮ¬н•ҳкІҢ мһ…л ҘлҗҳлҠ” мӢқ (11)мқҳ мӮ¬мқё м •нҳ„нҢҢ мҡҙлҸҷ мЈјнҢҢмҲҳ л°Ҹ 진нҸӯкіј м •л ¬лЈЁн”„ нҠ№м„ұм—җ мқҳн•ҳм—¬ кІ°м •лҗЁмқ„ м•Ң мҲҳ мһҲлӢӨ. мӢқ (11)мқҖ мӮ¬мқё м •нҳ„нҢҢлҘј к°Җм •н•ҳмҳҖмңјлӮҳ мҪ”мӮ¬мқё м •нҳ„нҢҢ к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳм—җ лҢҖн•ҙм„ңлҸ„ лҸҷмқјн•ң л°©лІ•мңјлЎң мӢқ (12), (13), (16)мҷҖ к°ҷмқҖ мҲҳмӢқмқҳ мң лҸ„к°Җ к°ҖлҠҘн•ҳл©° мӢқ (7), (10)м—җ лҢҖн•ҙм„ңлҸ„ мң мӮ¬н•ң нҳ•нғңлЎң м „к°ңк°Җ к°ҖлҠҘн•ҳл©° м •л ¬лЈЁн”„мқҳ м Ғм Ҳн•ң м„Өкі„лҘј нҶөн•ҳм—¬ мӣҗн•ҳлҠ” мһҗмІҙ м •л ¬ м„ұлҠҘмқ„ м–»мқ„ мҲҳ мһҲмқҢмқ„ м•Ң мҲҳ мһҲлӢӨ.
м•һм—җм„ң кё°мҲ н•ң л°”лҘј мў…н•©н•ҳл©ҙ Fig. 11мқҳ м •л ¬лЈЁн”„м—җ мһ…л ҘлҗҳлҠ” м •нҳ„нҢҢ к°ҖмҶҚлҸ„ мӢ нҳёлҠ” м •л ¬лЈЁн”„ мһҗмІҙмқҳ м Җм—ӯнҶөкіј нҠ№м„ұм—җ мқҳн•ҙ мҶҚлҸ„ л°Ҹ мһҗм„ё мҳӨм°Ём—җ лҜём№ҳлҠ” мҳҒн–Ҙмқҙ нҒ¬кІҢ к°җмҶҢн•ҳлҜҖлЎң к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ҙ м–ҙлҠҗ м •лҸ„ 진нҸӯмқҙ мҰқк°Җн•ҳм—¬лҸ„ мһҗмІҙ м •л ¬ м„ұлҠҘмқҙ нҒ¬кІҢ м Җн•ҳлҗҳм§Җ м•Ҡмқ„ кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ. к·ёлҹ¬лӮҳ 진нҸӯмқҙ нҒ¬кІҢ мҰқк°Җн•ҳкі AliasingмңјлЎң мқён•ҳм—¬ мӢқ (11)мқҳ wAiк°Җ мһ‘м•„м§ҖлҠ” кІҪмҡ° мҶҚлҸ„ л°Ҹ мһҗм„ёмҳӨм°Ёмқҳ мҰқк°Җк°Җ мҳҲмғҒлҗҳлҜҖлЎң мқҙм—җ лҢҖн•ң н—Ҳмҡ©кё°мӨҖмқҖ л§Ҳл Ён•ҙм•ј н• кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.
5.2 к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң н•ӯлІ• м„ұлҠҘ 분м„қ
ліё м Ҳм—җм„ңлҠ” к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң н•ӯлІ• м„ұлҠҘмқ„ 분м„қн•ҳкё° мң„н•ҳм—¬ лҸҷмІҙ мўҢн‘ңкі„м—җм„ң мёЎм •лҗң к°ҖмҶҚлҸ„ мёЎм •м№ҳм—җ мӢқ (1)мқҳ мһ…л Ҙл§Ңмқҙ мЎҙмһ¬н•ңлӢӨкі к°Җм •н•ҳкі н•ӯлІ• л°©м •мӢқмқ„ мқҙмҡ©н•ҳм—¬ н•ӯлІ• м„ұлҠҘмқ„ 분м„қн•ң кІ°кіјлҘј м ңмӢңн•ңлӢӨ. к°ҖмҶҚлҸ„ мёЎм •м№ҳм—җ мӢқ (1)мқҳ м„ұ분л§Ңмқҙ мЎҙмһ¬н•ҳкі мҷёл¶Җ мҡҙлҸҷмқҙ м—ҶлӢӨкі к°Җм •н•ҳл©ҙ н•ӯлІ•л°©м •мӢқмқҖ мӢқ (17), (18)кіј к°ҷмқҙ к°„лӢЁн•ҳкІҢ мң лҸ„лҗңлӢӨ[1~3]. мӢқ (17), (18)м—җм„ң vnмқҖ н•ӯлІ• мўҢн‘ңкі„м—җм„ңмқҳ мҶҚлҸ„, pnмқҖ н•ӯлІ• мўҢн‘ңкі„м—җм„ңмқҳ мқҙлҸҷкұ°лҰ¬, fbлҠ” лҸҷмІҙ мўҢн‘ңкі„м—җм„ңмқҳ к°ҖмҶҚлҸ„, C b m C b m C b m C b m
мӢқ (21)мқҳ м •м§Җ мғҒнғңм—җм„ңмқҳ мқҙлҸҷкұ°лҰ¬лҠ” мӢқ (20)мқҳ мҶҚлҸ„мҷҖ лҸҷмқјн•ҳкІҢ м—°мҶҚм ҒмңјлЎң л””лҚ” мҡҙлҸҷм—җ мқҳн•ң мҳҒн–ҘмқҖ л°ӣмңјлӮҳ м •нҳ„нҢҢ м„ұ분мқҙлқјм„ң мқҙлҸҷкұ°лҰ¬лҘј мҰқк°ҖмӢңнӮӨм§ҖлҠ” м•ҠлҠ” кІғмңјлЎң лӮҳнғҖлӮ¬лӢӨ. к·ёлҹ¬лӮҳ л””лҚ” мҡҙлҸҷ мң„мғҒ мҳӨм°Ём—җ мқҳн•ҙ л°ңмғқн•ң мҙҲкё° мҶҚлҸ„к°Җ кі„мҶҚн•ҙм„ң м Ғ분лҗЁм—җ л”°лқј м җ진м ҒмңјлЎң мқҙлҸҷкұ°лҰ¬лҠ” мҰқк°Җн•ҳлҠ” кІғмңјлЎң лӮҳнғҖлӮ¬лӢӨ. мҙҲкё° мң„мғҒ мҳӨм°Ёк°Җ мҙҲкё° мқҙлҸҷкұ°лҰ¬лҘј л°ңмғқмӢңнӮӨлҠ” кІғмңјлЎң мӢқ (21)м—җ лӮҳнғҖлӮ¬мңјлӮҳ 진нҸӯмқҙ л¬ҙмӢңн• м •лҸ„лЎң л§Өмҡ° мһ‘мқҖ кІғмңјлЎң лӮҳнғҖлӮ¬лӢӨ.
(19)
(21)
мӢқ (20), (21)мқҳ к·јкұ°лЎң нҢҗлӢЁн• л•Ң л””лҚ” мҡҙлҸҷм—җ мқҳн•ң м •нҳ„нҢҢ к°ҖмҶҚлҸ„ мёЎм •м№ҳлҠ” м •м§Җ мғҒнғңм—җм„ң л””лҚ” мҡҙлҸҷ мң„мғҒ мҳӨм°Ё(Оёij)м—җ мқҳн•ҙ мҶҚлҸ„ л°Ҹ мқҙлҸҷкұ°лҰ¬ мҳӨм°Ёк°Җ л°ңмғқн•ҳлҠ” кІғмңјлЎң лӮҳнғҖлӮ¬лӢӨ. л”°лқјм„ң л””л”” мҡҙлҸҷм—җ мқҳн•ң к°ҖмҶҚлҸ„кі„ кіө진мңјлЎң м •нҳ„нҢҢ к°ҖмҶҚлҸ„ мёЎм •м№ҳмқҳ 진нҸӯмқҙ мҰқк°Җн•ҳкі wAiк°Җ к°җмҶҢн•ҳкІҢ лҗҳл©ҙ мҶҚлҸ„ л°Ҹ мқҙлҸҷкұ°лҰ¬ мҳӨм°ЁлҸ„ к°ҷмқҙ мҰқк°Җн•ҳлҜҖлЎң мқҙм—җ лҢҖн•ң н—Ҳмҡ©кё°мӨҖмқҖ л§Ҳл Ён•ҙм•ј н• кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.
мӢң뮬л Ҳмқҙм…ҳ кІ°кіј
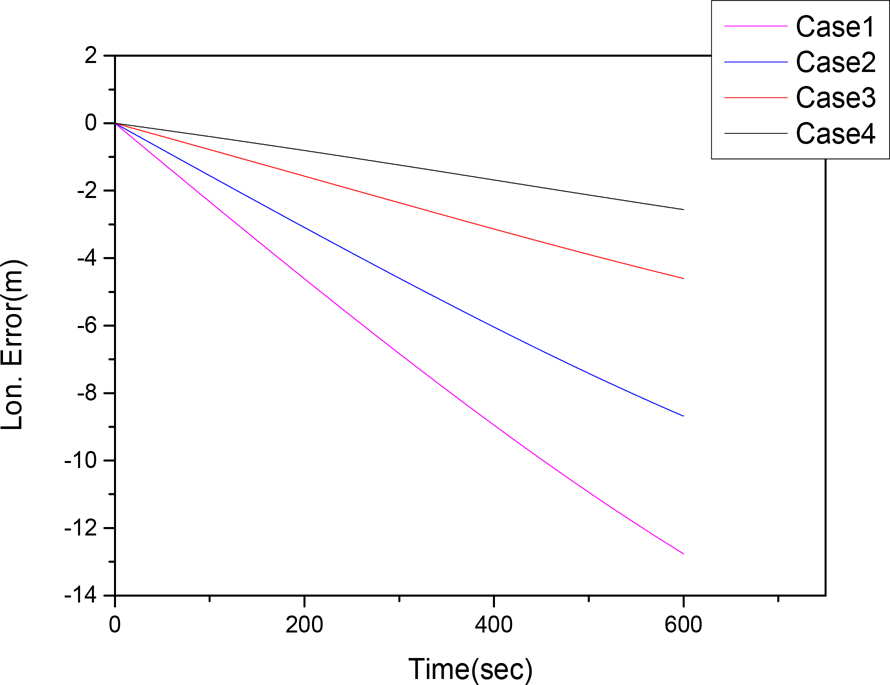
ліё м Ҳм—җм„ңлҠ” 5м Ҳм—җм„ң кё°мҲ н•ң л””лҚ” мҡҙлҸҷм—җ мқҳн•ң к°ҖмҶҚлҸ„кі„ кіө진мқҙ м •л ¬/н•ӯлІ•м—җ лҜём№ҳлҠ” мҳҒн–Ҙм—җ лҢҖн•ҳм—¬ мқҙлЎ м Ғмқё 분м„қкІ°кіјмқҳ нғҖлӢ№м„ұмқ„ кІҖмҰқн•ҳкё° мң„н•ҙ мҲҳн–үн•ң мӢң뮬л Ҳмқҙм…ҳ кІ°кіјлҘј м ңмӢңн•ңлӢӨ. мӢң뮬л Ҳмқҙм…ҳмқ„ мң„н•ң л””лҚ” мҡҙлҸҷмқҖ 축별 мғҒнҳё к°„м„ӯмқҙ м—ҶлӢӨкі к°Җм •н•ҳм—¬ мӢқ (1)мқ„ м°ёмЎ°н•ҳм—¬ 축별 к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳлҘј лӘЁлҚёл§Ғн•ҳл©ҙ мӢқ (22)мҷҖ к°ҷлӢӨ. мӢқ (22)м—җм„ң к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң мҰқнҸӯмқ„ лӘЁмӮ¬н•ҳкё° мң„н•ҳм—¬ мҰқнҸӯкі„мҲҳ ОұлҘј Table 1кіј к°ҷмқҙ 1~6к№Ңм§Җ мҰқк°ҖмӢңнӮӨлҠ” 4к°Җм§Җ кІҪмҡ°лҘј к°Җм •н•ҳмҳҖмңјл©° 축별 л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳлҠ” 370, 430, 460 HzлЎң к°Җм •н•ҳкі м§„нҸӯмқҖ Fig. 10мқ„ м°ёмЎ°н•ҳм—¬ 1.5 g(14.7 m/sec2)лЎң м„Өм •н•ҳмҳҖлӢӨ.
TableВ 1.
Amplification factor of acceleration amplitude for simulation
| Case | Оұ |
|---|---|
| Case1 | 6 |
| Case2 | 4 |
| Case3 | 2 |
| Case4 | 1 |
(22)лҘј мӢқ (2)м—җ мқҳн•ҙм„ң н•ӯлІ• кі„мӮ°мЈјкё°лЎң ліҖнҷҳн•ҳкІҢ лҗҳл©ҙ мӢқ (3), (4)м—җ мқҳн•ҙм„ң 진нҸӯмқҙ к°җмҮ„н•ҳкІҢ лҗҳлҠ”лҚ° мқҙлҘј л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳ лі„лЎң кі„мӮ°н•ҳл©ҙ 370 Hzм—җм„ң к°Ғк°Ғ 0.035, вҲ’0.0696мқҙ лҗҳл©° 430 Hzм—җм„ңлҠ” к°Ғк°Ғ 0.0305, 0.0599к°Җ лҗңлӢӨ. л”°лқјм„ң мӢқ (3), (4)м—җ мқҳкұ° л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳк°Җ 370 Hzмқё кІҪмҡ°мқҳ 진нҸӯ к°җмҮ„мңЁмқҖ 0.078мқҙкі 430 Hzм—җм„ңлҠ” 0.067мқҙ лҗңлӢӨ. л”°лқјм„ң мӢқ (22)мқҳ мҲҳнҸү축 м„ұ분м—җ лҢҖн•ҳм—¬ мӢқ (2)лҘј мқҙмҡ©н•ҳм—¬ н•ӯлІ• кі„мӮ°мЈјкё°лЎң ліҖнҷҳн•ҳкі мқҙлҘј мӢқ (11)кіј к°ҷмқҙ лӮҳнғҖлӮҙлҠ” кІҪмҡ° 진нҸӯ A i m
мӢқ (23)мқҳ мһ…л Ҙ мӢ нҳём—җ лҢҖн•ҳм—¬ Fig. 11мқҳ к°ңлһө мһҗмІҙ м •л ¬мқҖ 60мҙҲк°„ мҲҳн–үлҗҳл©° мқҙл•Ңмқҳ м Ҳм җ мЈјнҢҢмҲҳ w c ( w c + k b g )
мӢқ (23)мқҳ 진нҸӯкіј мӢқ (24)мқ„ мқҙмҡ©н•ҳм—¬ к°ңлһө мһҗм ң м •л ¬м—җм„ң кө¬н•ң мһҗм„ёмҳӨм°Ёмқҳ 진нҸӯмқ„ мқҙлЎ м ҒмңјлЎң кі„мӮ°н•ҳл©ҙ мӢқ (23)мқҳ Ax, Ayм—җ мҳҒн–Ҙмқ„ л°ӣлҠ” лЎӨ к°ҒмқҖ Table 1мқҳ мҰқнҸӯкі„мҲҳ Оұк°Җ 6мқё кІҪмҡ° к°Ғк°Ғ 0.0045 deg, 0.0039 degк°Җ лҗңлӢӨ. м •л°Җ мһҗмІҙ м •л ¬м—җм„ңлҠ” мӢқ (24), (25)м—җ мқҳкұ° м Ҳм җ мЈјнҢҢмҲҳк°Җ мһ‘м•„м§ҖлҜҖлЎң 진нҸӯмқҙ к°ңлһө мһҗмІҙ м •л ¬ лҢҖ비н•ҳм—¬ м•Ҫ 1 16
м§ҖкёҲк№Ңм§Җмқҳ мқҙлЎ м Ғмқё 분м„қ кІ°кіјм—җ лҢҖн•ң нғҖлӢ№м„ұмқ„ нҷ•мқён•ҳкё° мң„н•ҳм—¬ Table 1мқҳ к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң м •нҳ„нҢҢ к°ҖмҶҚлҸ„ мёЎм •м№ҳмқҳ мҰқнҸӯмқ„ к°Җм •н•ң 4к°Җм§Җ кІҪмҡ°м—җ лҢҖн•ҳм—¬ мӢң뮬л Ҳмқҙм…ҳмқ„ мҲҳн–үн•ҳмҳҖмңјл©° лЎӨ, н”јм№ҳ л°Ҹ л°©мң„к°Ғмқ„ к·ёлҰјмңјлЎң лӮҳнғҖлӮҙл©ҙ Fig. 13~15кіј к°ҷлӢӨ. к·ёлҰјм—җм„ң лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ Table 1мқҳ Case1м—җ лҢҖн•ҳм—¬ к°ңлһө мһҗмІҙ м •л ¬мқё кІҪмҡ°м—җ лҢҖн•ҳм—¬ мқҙлЎ м ҒмңјлЎң кі„мӮ°лҗң мһҗм„ёмҳӨм°Ё 진нҸӯкіј мӢң뮬л Ҳмқҙм…ҳ кІ°кіјк°Җ лҸҷмқјн•ң нҠ№м„ұмқ„ ліҙмқҙл©° Table 1мқҳ мҰқнҸӯлҘ м—җ л”°лқј Fig. 13~15 진нҸӯмқҙ к°җмҶҢн•ҳлҠ” кІғмқ„ нҷ•мқён•ҳмҳҖмңјл©° мқҙлҹ¬н•ң кІ°кіјлҠ” ліё л…јл¬ём—җм„ң 분м„қн•ң лӮҙмҡ©мқҙ м •нҷ•н•Ёмқ„ ліҙм—¬мЈјлҠ” кІ°кіјмқҙлӢӨ. лҳҗн•ң м •л°Җ мһҗмІҙ м •л ¬м—җм„ң мһҗм„ё мҳӨм°Ёмқҳ 진нҸӯмқҙ 1 16
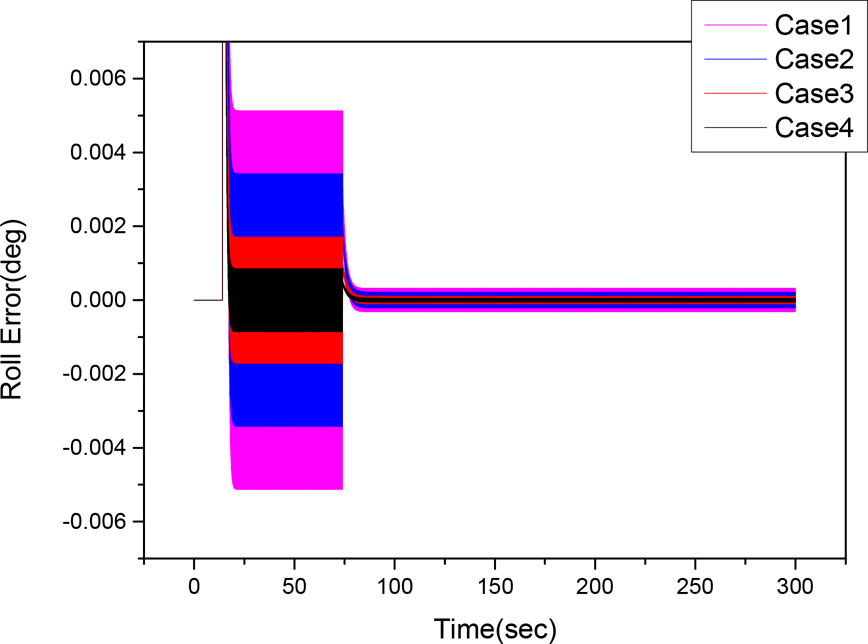

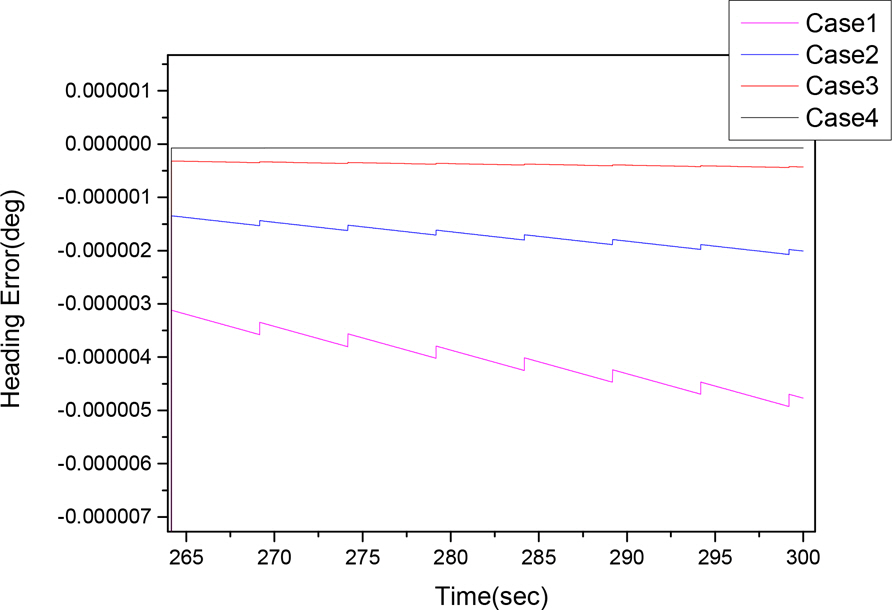
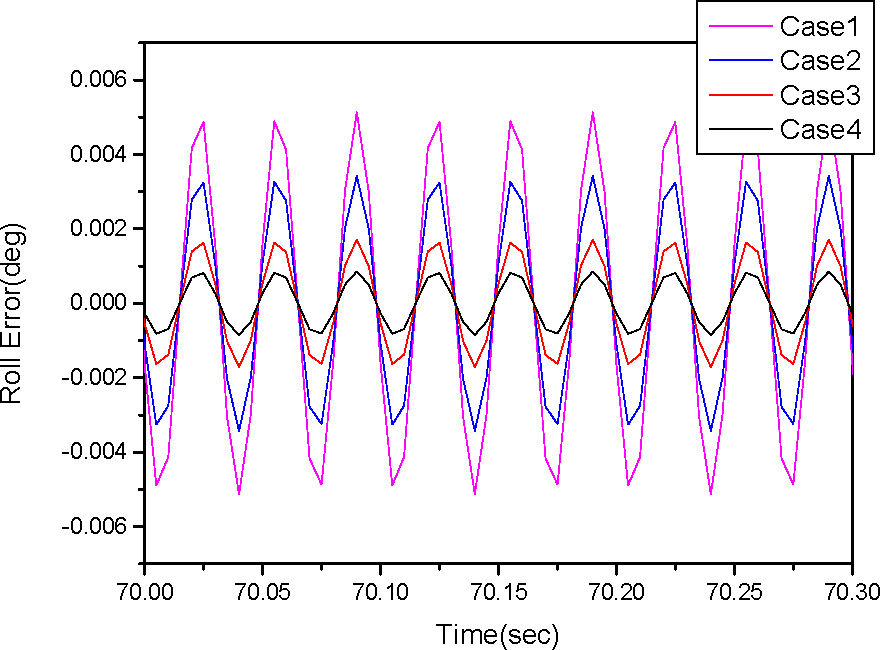
Fig. 13м—җм„ң 70вҲј70.3мҙҲ кө¬к°„мқ„ нҷ•лҢҖн•ҳм—¬ к·ёлҰјмңјлЎң лӮҳнғҖлӮҙл©ҙ Fig. 16кіј к°ҷлӢӨ. Fig. 16мқҖ Aliasingм—җ мқҳн•ҙ мһҗм„ёмҳӨм°Ёмқҳ мЈјнҢҢмҲҳкё° 30 HzлЎң кіө진함мқ„ ліҙм—¬мЈјкі мһҲмңјл©° Table 1мқҳ мҰқнҸӯлҘ м—җ л”°лқј мһҗм„ёмҳӨм°Ёмқҳ 진нҸӯмқҙ мҰқк°Җн•Ёмқ„ ліҙм—¬мЈјкі мһҲмңјл©° мқҙлҹ¬н•ң кІ°кіјлҠ” ліё л…јл¬ёмқҳ н•ҙм„қ кІ°кіјк°Җ м •нҷ•н•Ёмқ„ мҰқлӘ…н•ҳлҠ” кІ°кіјмқҙлӢӨ.
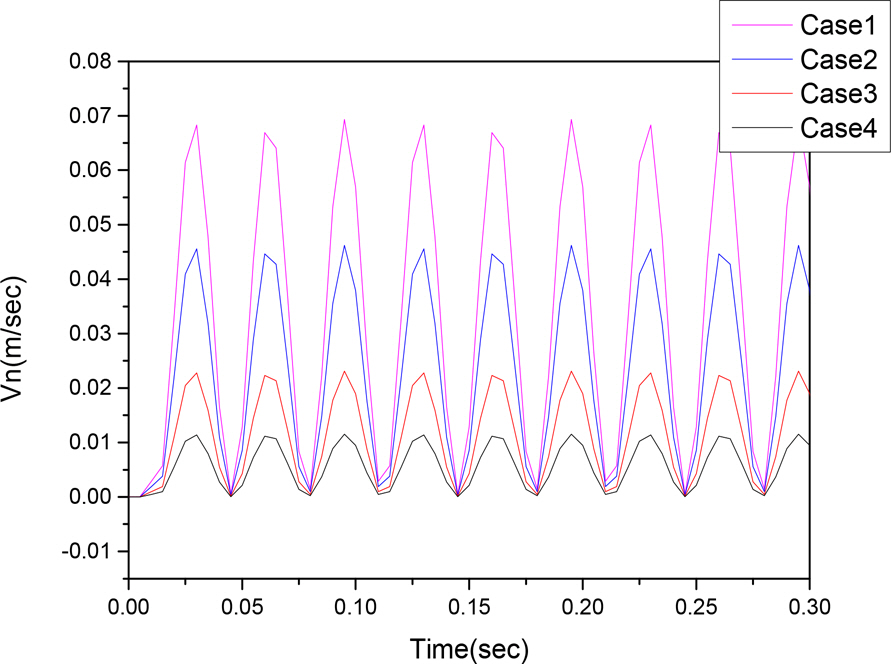
к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң н•ӯлІ• м„ұлҠҘмқ„ нҷ•мқён•ҳкё° мң„н•ҳм—¬ мӢқ (22)мқҳ мһ…л Ҙмқҙ мЎҙмһ¬н•ҳлҠ” кІҪмҡ°лҘј к°Җм •н•ҳм—¬ 600мҙҲк°„ мҲңмҲҳн•ӯлІ•мқ„ мҲҳн–үн•ҳлҠ” мӢң뮬л Ҳмқҙм…ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. мқҙ л•Ң мҲҳм§Ғ축 мҶҚлҸ„ л°Ҹ кі лҸ„лҠ” м •нҷ•н•ң кі лҸ„лЎң м•Ҳм •нҷ”лҗҳм—ҲлӢӨкі к°Җм •н•ҳмҳҖлӢӨ. Table 1мқҳ 4к°Җм§Җ кІҪмҡ°мқҳ к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳм—җ лҢҖн•ң мҶҚлҸ„ л°Ҹ мқҙлҸҷкұ°лҰ¬лҘј к·ёлҰјмңјлЎң лӮҳнғҖлӮҙл©ҙ Fig. 17~21кіј к°ҷлӢӨ. Fig. 17~18мқҳ мҶҚлҸ„лҠ” мӢқ (20)м—җм„ң лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ л””лҚ” мҡҙлҸҷ мң„мғҒ мҳӨм°Ём—җ мқҳн•ҙ л°ңмғқн•ҳл©° 진нҸӯмқҖ мӢқ (23)мқҳ к°ҖмҶҚлҸ„ мёЎм •м№ҳ 진нҸӯм—җ мқҳн•ҙ кІ°м •лҗЁмқ„ нҷ•мқён•ҳмҳҖлӢӨ. Table 1мқҳ Case1м—җ лҢҖн•ң мқҙлЎ м Ғмқё 진нҸӯмқҖ 0.0366 m/secмқҙл©° л””лҚ” мҡҙлҸҷ мң„мғҒ мҳӨм°Ём—җ мқҳн•ң 진нҸӯкіј лҚ”н•ҙм ём„ң мөңмў… Fig. 17~18мқҳ мҶҚлҸ„к°Җ л°ңмғқлҗҳлҠ” кІғмқ„ мӢқ (20)мқҖ ліҙм—¬мЈјкі мһҲлӢӨ. Fig. 17~18м—җ лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ мқҙлЎ м ҒмңјлЎң кі„мӮ°лҗң 진нҸӯкіј мӢң뮬л Ҳмқҙм…ҳ кІ°кіјк°Җ мқјм№ҳн•ҳлҠ” кІғмқ„ нҷ•мқён• мҲҳ мһҲлӢӨ. мқҙлҹ¬н•ң мӮ¬мӢӨмқ„ кё°л°ҳмңјлЎң мӢқ (23)мқҳ x축 к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳлҠ” Fig. 17мқҳ e축 мҶҚлҸ„ мҳӨм°ЁлҘј л°ңмғқмӢңнӮӨл©° e축мқҳ мң„мғҒ мҳӨм°ЁлҠ” 115лҸ„лЎң лӮҳнғҖлӮ¬мңјл©° n축 мҶҚлҸ„ мҳӨм°ЁлҘј л°ңмғқмӢңнӮӨлҠ” мӢқ (23)мқҳ y축 к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳмқҳ мң„мғҒ мҳӨм°ЁлҠ” 0лҸ„лЎң нҷ•мқёлҗҳм—ҲлӢӨ. 축 лі„ мң„мғҒ мҳӨм°Ёк°Җ лӢӨлҘҙкІҢ лӮҳнғҖлӮҳлҠ” кІғмқҖ мӢқ (22)мҷҖ к°ҷмқҙ 축 лі„ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳк°Җ лӢӨлҘҙкё° л•Ңл¬ём—җ н•ӯлІ• лӘЁмҡ°л“ң(mode) 진мһ… мӢңм җм—җ л”°лқј мң„мғҒ мҳӨм°Ё к°Җ лӢӨлҘҙкІҢ лӮҳнғҖлӮҳлҠ” кІғмқ„ мӢң뮬л Ҳмқҙм…ҳмқ„ нҶөн•ҳм—¬ нҷ•мқён•ҳмҳҖлӢӨ. Fig. 19мқҖ 0.3мҙҲк№Ңм§Җмқҳ n축 мҶҚлҸ„ мҳӨм°ЁлҘј нҷ•лҢҖн•ң к·ёлҰјмңјлЎң мӢқ (23)м—җ лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳк°Җ 30 Hzмқҙкі Table 1мқҳ мҰқнҸӯлҘ м—җ л”°лқјм„ң мҶҚлҸ„мқҳ нҒ¬кё°к°Җ лӢ¬лқјм§ҖлҠ” кІғмқ„ ліҙм—¬мЈјкі мһҲлӢӨ.
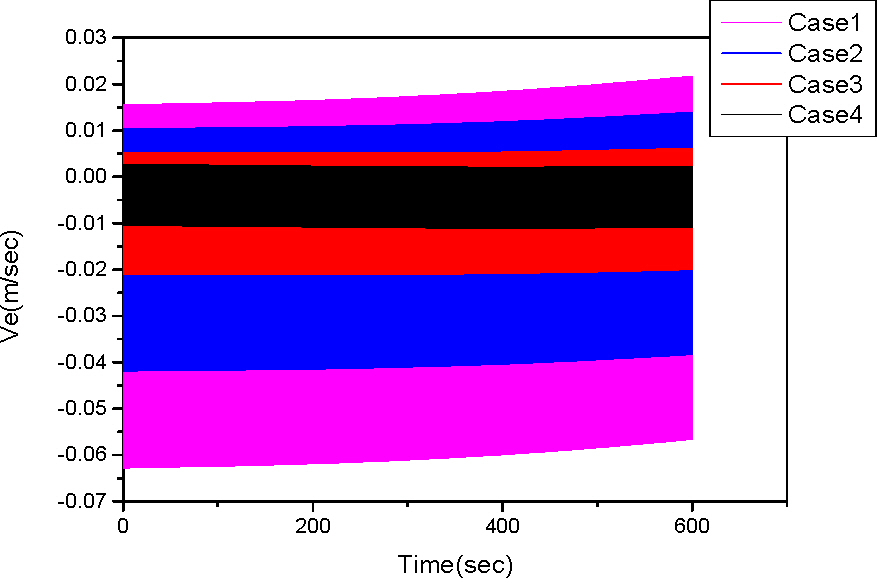
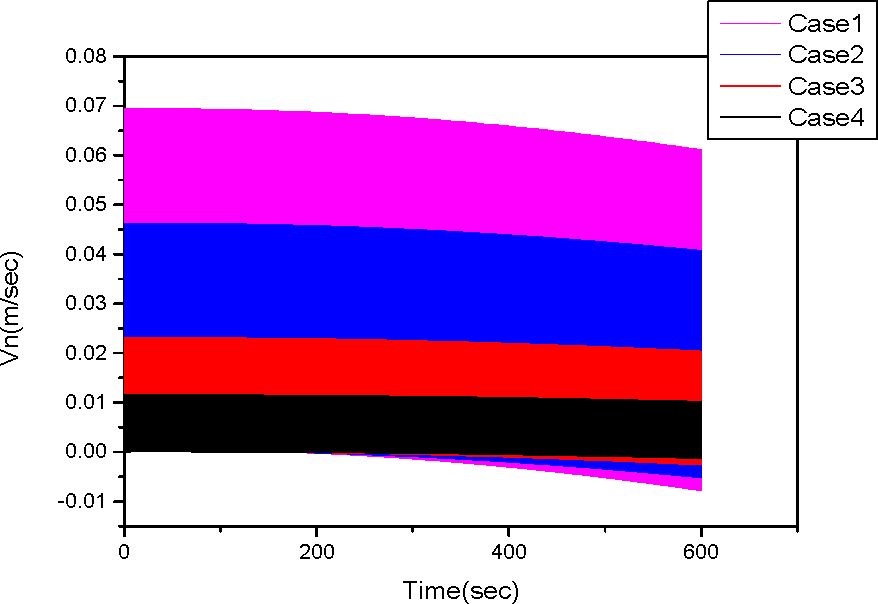
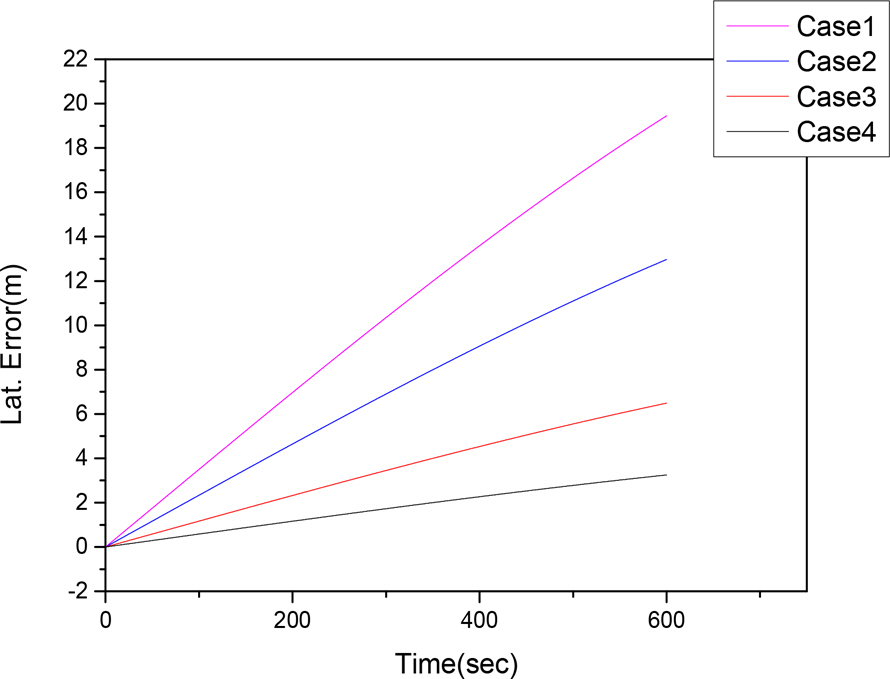
мӢқ (23)мқҳ к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳм—җ лҢҖн•ң мқҙлҸҷкұ°лҰ¬лҠ” мӢқ (21)м—җ лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ л””лҚ” мҡҙлҸҷ мң„мғҒ мҳӨм°Ём—җ мқҳн•ҙ л°ңмғқн•ҳлҠ” мҶҚлҸ„ мҳӨм°Ёк°Җ м Ғ분лҗҳм–ҙ лӮҳнғҖлӮҳлҠ” кІғмңјлЎң лӮҳнғҖлӮ¬мңјл©° Fig. 18мқҳ Case1м—җ лҢҖн•ҳм—¬ мң„мғҒ мҳӨм°Ём—җ мқҳн•ҙ л°ңмғқн•ҳлҠ” мҶҚлҸ„к°Җ м•Ҫ 0.0366 m/secмқҙлҜҖлЎң мқҙлҘј 600мҙҲк°„ м Ғ분н•ҳл©ҙ м•Ҫ 22 mмқҳ мқҙлҸҷкұ°лҰ¬к°Җ л°ңмғқн• кІғмңјлЎң мқҙлЎ м ҒмңјлЎң 분м„қлҗҳл©° мӢң뮬л Ҳмқҙм…ҳ кІ°кіј мқҙлЎ м ҒмңјлЎң 분м„қн•ң кІ°кіјмҷҖ лҸҷмқјн•ң кІ°кіјк°Җ мӮ°м¶ңлҗЁмқ„ Fig. 20мқҖ ліҙм—¬мЈјкі мһҲлӢӨ. мқҙлҹ¬н•ң кІ°кіјлҘј мў…н•©н•ҙ ліј л•Ң ліё л…јл¬ём—җм„ң м ңмӢңн•ң к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң м •нҳ„нҢҢ к°ҖмҶҚлҸ„кі„ мёЎм •м№ҳ мҰқнҸӯмқҙ м •л ¬/н•ӯлІ•м—җ лҜём№ҳлҠ” мҳҒн–Ҙ 분м„қмқҙ м •нҷ•н•ҳкІҢ лҗҳм—ҲмқҢмқ„ нҷ•мқён• мҲҳ мһҲлӢӨ.
ліё м Ҳмқҳ мӢң뮬л Ҳмқҙм…ҳ кІ°кіјлҠ” мӢқ (23)м—җ лӮҳнғҖлӮң л°”мҷҖ к°ҷмқҙ Aliasing нҳ„мғҒм—җ мқҳн•ҙ ліҖкІҪлҗң л””лҚ” мҡҙлҸҷ мЈјнҢҢмҲҳ ПүAiк°Җ 30 Hzмқё кІҪмҡ°лҘј к°Җм •н•ҳм—¬ н•ҙм„қмқ„ мҲҳн–үн•ң кІ°кіјлЎң к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң мёЎм •м№ҳ мҰқнҸӯмқҙ 6л°°к№Ңм§Җ мҰқк°Җн•ҳлҚ”лқјлҸ„ м •л ¬/н•ӯлІ• м„ұлҠҘмқ„ нҒ¬кІҢ м Җн•ҳмӢңнӮӨм§ҖлҠ” м•Ҡмқ„ кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ. к·ёлҹ¬лӮҳ нҳ„мӢӨм ҒмңјлЎң л””лҚ” мЈјнҢҢмҲҳлҠ” м ңмһ‘ кіјм •м—җм„ң м„Өкі„ лҢҖ비 л§Һмқҙ к°ҖліҖлҗҳлҜҖлЎң мқҙм—җ лҢҖн•ң н—Ҳмҡ© кё°мӨҖмңјлЎң нҢҗлӢЁн• л•Ң мӢқ (23)мқҳ мЈјнҢҢмҲҳк°Җ 10 Hz к№Ңм§Җ к°җмҶҢн• к°ҖлҠҘм„ұмқҙ мЎҙмһ¬н•ңлӢӨ. мқҙлҹ¬н•ң кІҪмҡ° мӢқ (20), (24), (25)м—җ мқҳкұ° мһҗм„ёмҳӨм°ЁлҠ” 9л°° мҶҚлҸ„мҳӨм°ЁлҠ” 3л°°к°Җ мҰқк°Җн• кІғмңјлЎң мҳҲмғҒлҗңлӢӨ. л”°лқјм„ң мқҙлҹ¬н•ң мӮ¬мӢӨмқ„ к·јкұ°лЎң к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң к°ҖмҶҚлҸ„ мёЎм •м№ҳ мҰқнҸӯлҘ мқ„ 3л°° мқҙн•ҳлЎң к·ңм ңн•ҳм—¬м•ј мһҗм ң м •л ¬ л°Ҹ н•ӯлІ• м„ұлҠҘмқҙ нҒ¬кІҢ м Җн•ҳлҗҳм§Җ м•Ҡмқ„ кІғмңјлЎң 분м„қлҗҳм—ҲлӢӨ.
кІ° лЎ
ліё л…јл¬ёмқҖ RLG л””лҚ” мҡҙлҸҷм—җ мқҳн•ң к°ҖмҶҚлҸ„кі„ кіө진мқҙ мһҗмІҙ м •л ¬ л°Ҹ н•ӯлІ• м„ұлҠҘм—җ лҜём№ҳлҠ” мҳҒн–Ҙмқ„ мқҙлЎ м ҒмңјлЎң 분м„қн•ң кІ°кіјлҘј м ңмӢңн•ҳмҳҖлӢӨ. 분м„қкІ°кіј к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң к°ҖмҶҚлҸ„кі„ м¶ңл Ҙ мҰқнҸӯмқҖ н•ӯлІ• кі„мӮ° мЈјкё°лЎң лҚ°мқҙн„°лҘј ліҖнҷҳн•ҳлҠ” кіјм •м—җм„ңмқҳ 진нҸӯ к°җмҮ„мңЁлЎң мқён•ҳм—¬ 진нҸӯмқҙ нҒ¬кІҢ к°җмҶҢн•ҳкі Aliasing нҡЁкіјлЎң мқён•ҳм—¬ мЈјнҢҢмҲҳк°Җ ліҖкІҪлҗҳлҠ” кІғмңјлЎң лӮҳнғҖлӮ¬лӢӨ. мқҙмҷҖ к°ҷмқҙ ліҖкІҪлҗң к°ҖмҶҚлҸ„ мёЎм •м№ҳлҠ” мһҗмІҙ м •л ¬м—җм„ңлҠ” м •л ¬ лЈЁн”„мқҳ мқҙл“қкіј мЈјнҢҢмҲҳм—җ мқҳн•ҙ мһҗм„ё мҳӨм°Ё 진нҸӯмқҙ кІ°м •лҗҳкі н•ӯлІ•м—җм„ңлҠ” мҙҲкё° мң„мғҒ мҳӨм°Ё л°Ҹ мЈјнҢҢмҲҳм—җ мқҳн•ҙ мҶҚлҸ„мҳӨм°Ёмқҳ нҒ¬кё°к°Җ кІ°м •лҗЁмқ„ мқҙлЎ м ҒмңјлЎң 분м„қн•ҳмҳҖмңјл©° мӢң뮬л Ҳмқҙм…ҳмқ„ нҶөн•ҳм—¬ нғҖлӢ№м„ұмқ„ кІҖмҰқн•ҳмҳҖлӢӨ. мқҙлҹ¬н•ң кІ°кіјлЎң нҢҗлӢЁн• л•Ң к°ҖмҶҚлҸ„кі„ кіө진м—җ мқҳн•ң к°ҖмҶҚлҸ„ мёЎм •м№ҳ мҰқнҸӯмқҳ н—Ҳмҡ© кё°мӨҖмқҖ м •мғҒмғҒнғң лҢҖ비н•ҳм—¬ 3л°° мқҙн•ҳмқҳ мҰқнҸӯлҘ мқ„ к°Җм§Ҳ л•Ң 추к°Җм Ғмқё мһҗмІҙ м •л ¬/н•ӯлІ• м„ұлҠҘмқҳ м Җн•ҳк°Җ л°ңмғқн•ҳм§Җ м•Ҡмқ„ кІғмңјлЎң нҷ•мқёлҗҳм—Ҳмңјл©° мқҙлҹ¬н•ң кІ°кіјлҠ” л Ҳмқҙм Җ кҙҖм„ұн•ӯлІ•мһҘм№ҳм—җ нғ‘мһ¬лҗ к°ҖмҶҚлҸ„кі„ м„ м •м—җ м Ғмҡ©лҗ мҳҲм •мқҙлӢӨ.




